1. Introduction
MEMS gyroscopes are a kind of angular rate sensor widely used in the fields of navigation, motor vehicles, and mobile devices. They provide inertial angular rate measurements with low cost and low power consumption [
1,
2]. Recent years have witnessed the development of adaptive control methods for MEMS gyroscopes. The application of an adaptive control algorithm can provide on-line estimation of input angular rate and other parameters, thus it has fine robustness features against parameter variances and disturbances.
Park has proposed an adaptive measurement mode for operating MEMS gyroscopes, and formulated a unified methodology for the synthesis and analysis for the algorithm [
3]. The algorithm can realize online estimation and compensation of varied defects and disturbances that influence the behavior of a MEMS gyroscope. He also extended the adaptive control method to mode-tuning and angle measurement applications, which can directly measure the rotation angle without integration of the angular rate [
4,
5]. John presented the concept of an adaptively controlled single-mass tri-axial angular rate (AR) sensor [
6]. The single mass is free to move in three directions, thus a tri-axial perfect oscillator model is chosen as a reference. According to the control law, the coefficients of damping, stiffness and input angular rate can be completely estimated. To ensure the parameter convergence in the continuous domain, a modified trajectory algorithm is presented with the aim to reduce the discretization errors. Fei adopted sliding mode control in MEMS gyroscopes [
7,
8,
9]. A proportional and integral sliding surface is defined and applied to calculate the control forces of different axes. In order to eliminate the chattering, the discontinuous control component is replaced by a smoothing sliding mode component. The algorithm is also updated by the robust sliding mode control method and applied on the tri-axial gyroscope model. Leland developed Lyapunov-based adaptive controllers for MEMS gyroscopes to compensate the uncertainty in the natural frequencies, mode coupling and damping. The controllers are tested under averaged low frequency model and full gyroscope model conditions, respectively [
10,
11]. Dong presented a new adaptive control method based on Active Disturbance Rejection Control (ADRC), which can precisely estimate and compensate the disturbance on each axis, and is applied on a vibrational beam gyroscope [
12].
Most of the reported control methods remained at the simulation stage, and others are implemented on analog circuits. Thus, for the first time, we look into the possibilities of realizing the adaptive control algorithm on a digitalized gyroscope system. Once the algorithm is implemented in the digitalized setup, the measured angular rate will not be affected by variance of the coupling coefficients or the quality factor of the gyroscope, thus the system has better adaptivity for different gyroscopes under different conditions.
The algorithm presented in this paper is based on a model reference adaptive control algorithm, and the adaptive control algorithm is further modified based on previous work. The adaptive law is redesigned to estimate the asymmetric coupling parameters and the reference model is replaced with two PLLs for FPGA implementation. Besides, the rotation mode of the gyroscope is considered in this manuscript and the corresponding elimination section is designed. This paper is organized as follows: in
Section 2 the structure diagram and the dynamic characteristic of the gyroscope system are first described, and next in
Section 3 the adaptive control method with the robust resistance to
z-axis rotation mode is finally presented. Simulation results and the parameter estimation process are then discussed in
Section 4, and finally the algorithm implementation on the FPGA-based digitalized gyroscope system is demonstrated in
Section 5.
2. Gyroscope System Description
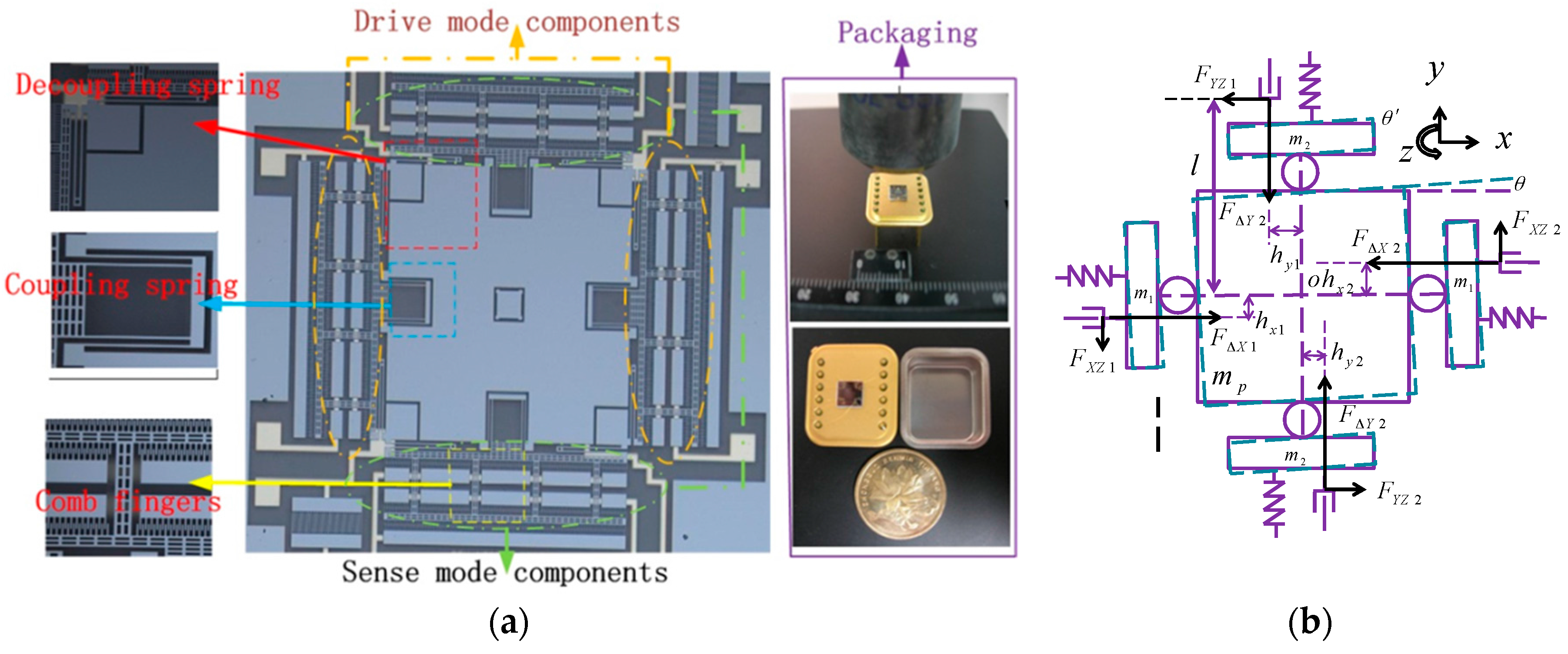
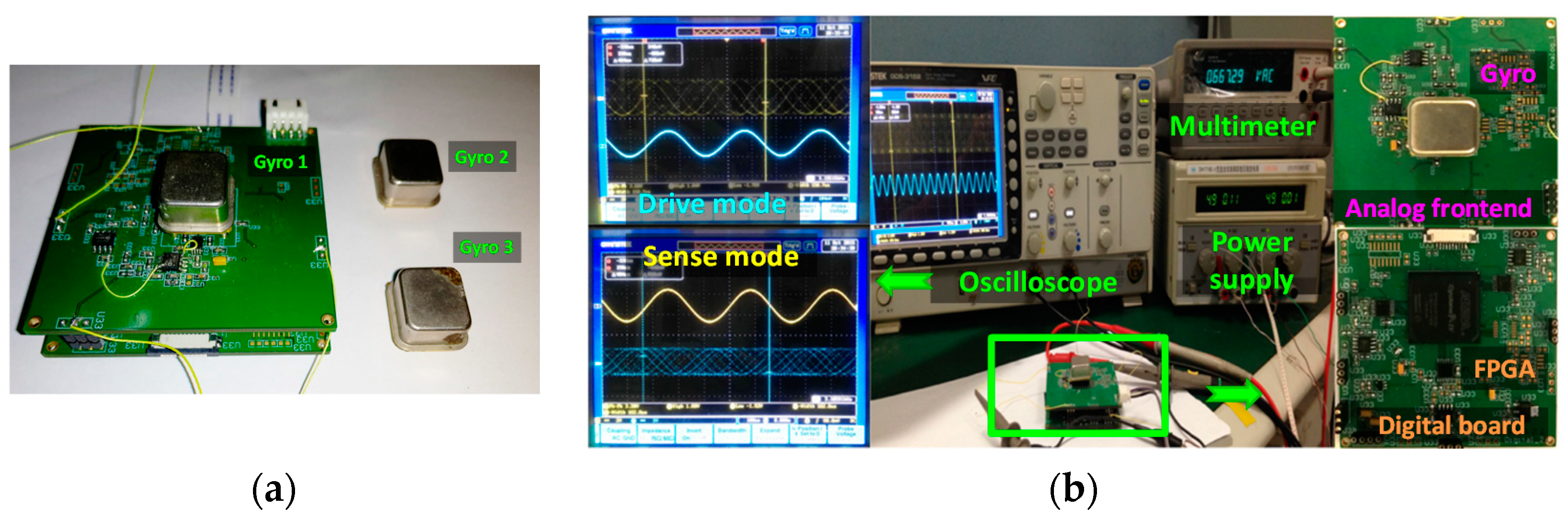
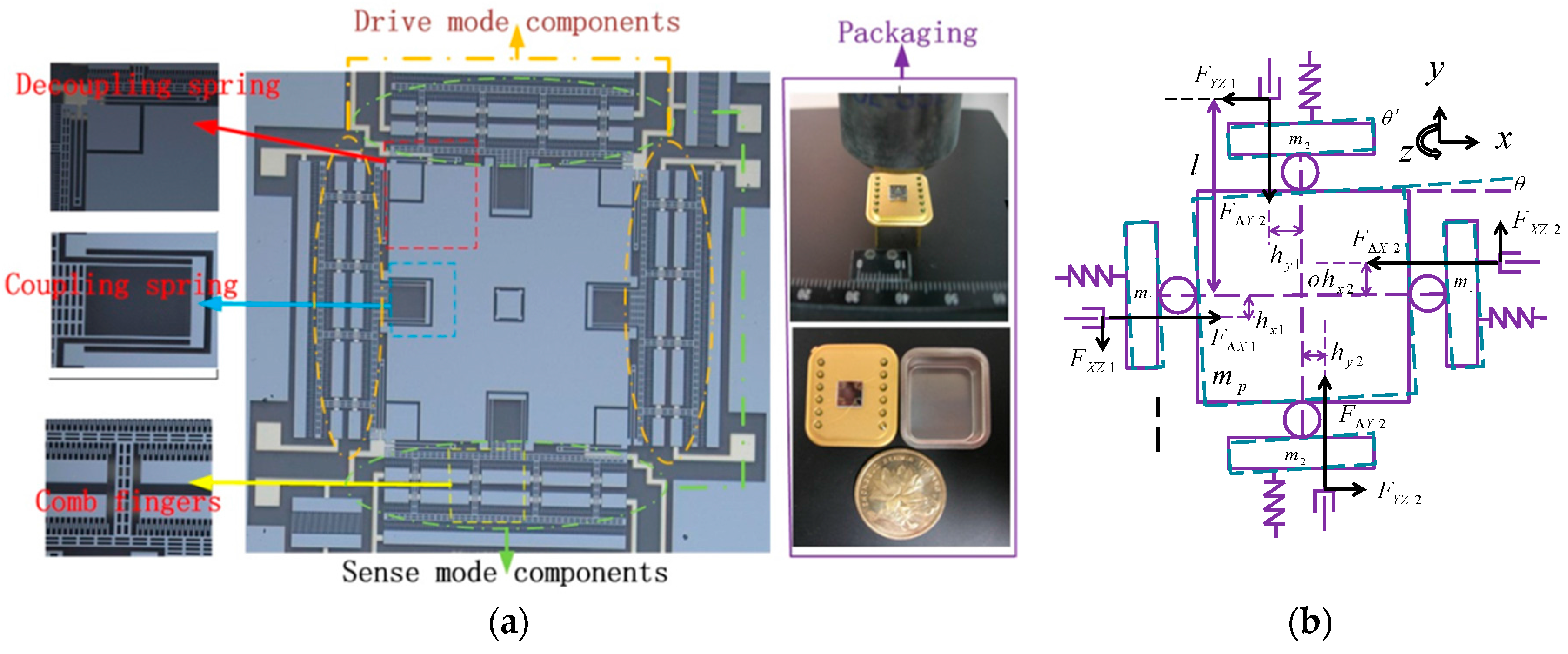
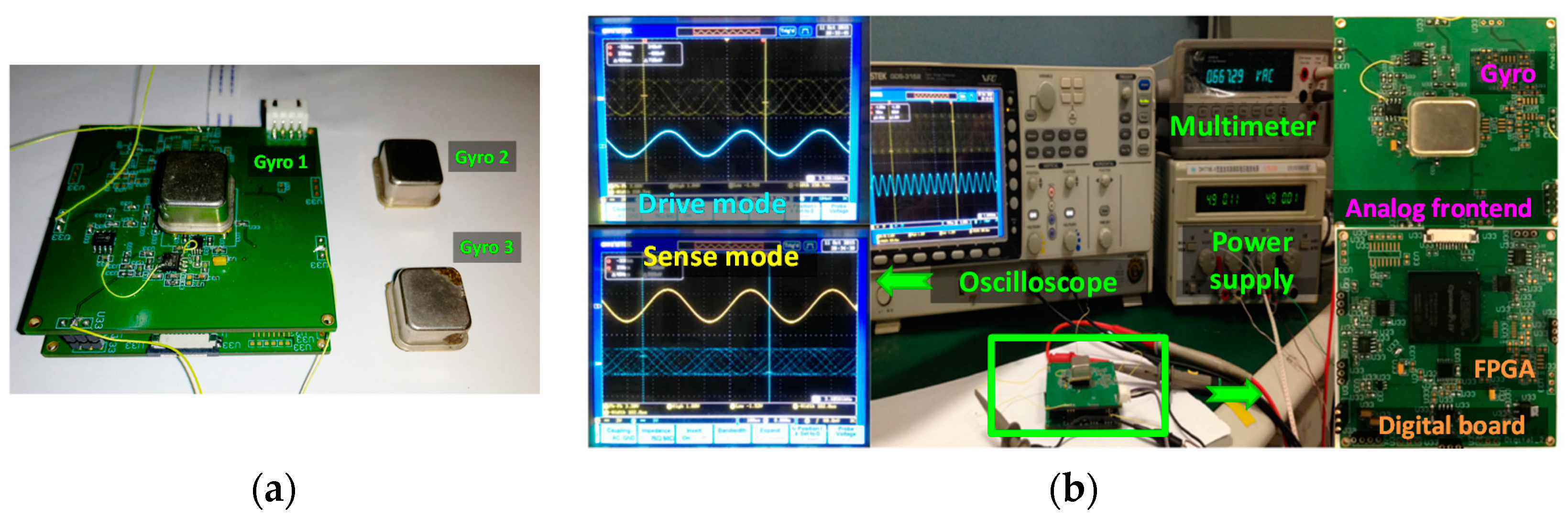
A capacitive silicon micromachined gyroscope is used in this work. The designed
z-axis gyroscope is a double decoupled single proof mass gyroscope. It is a two-layer structure which mainly consists of the drive mode components, the sense mode components, the proof mass, the damping elements and the glass substrate,
etc. The details of the gyroscope including its packaging, comb fingers, coupling and decoupling springs are displayed in
Figure 1a.
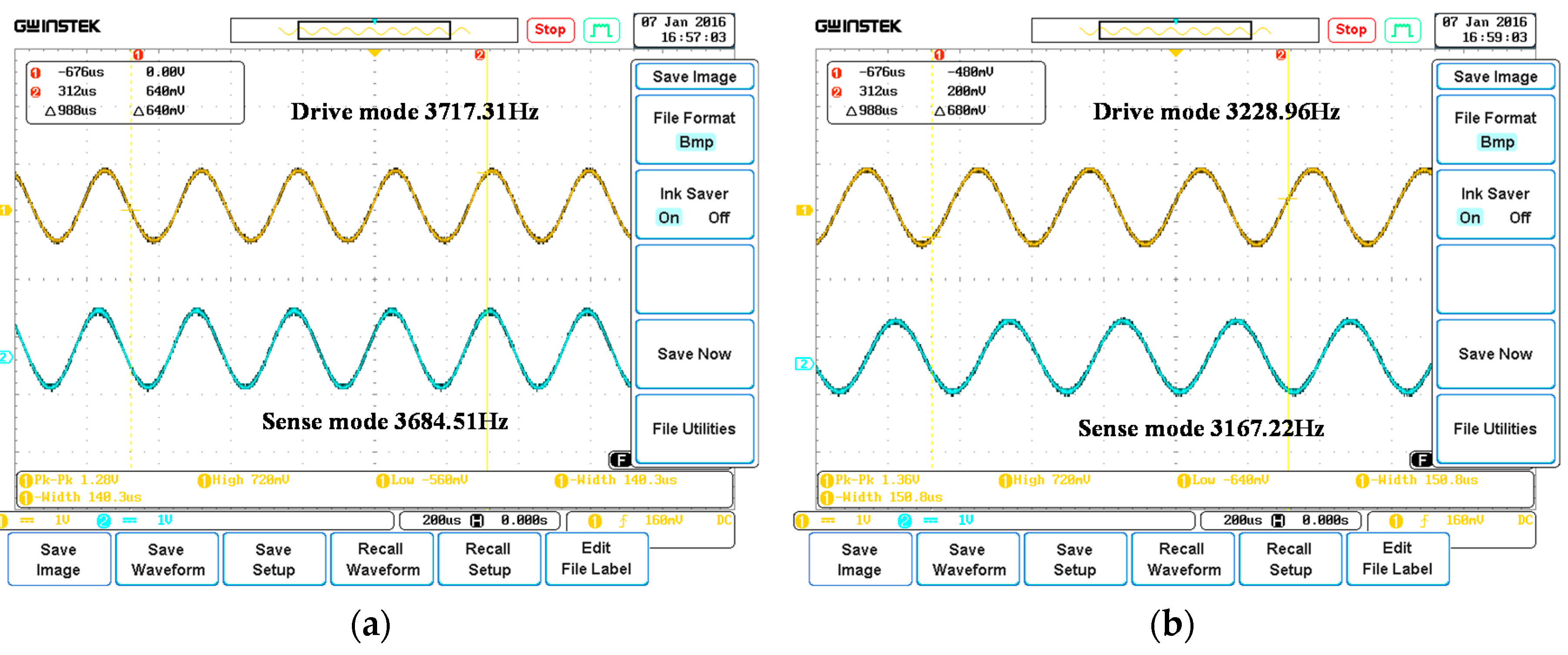
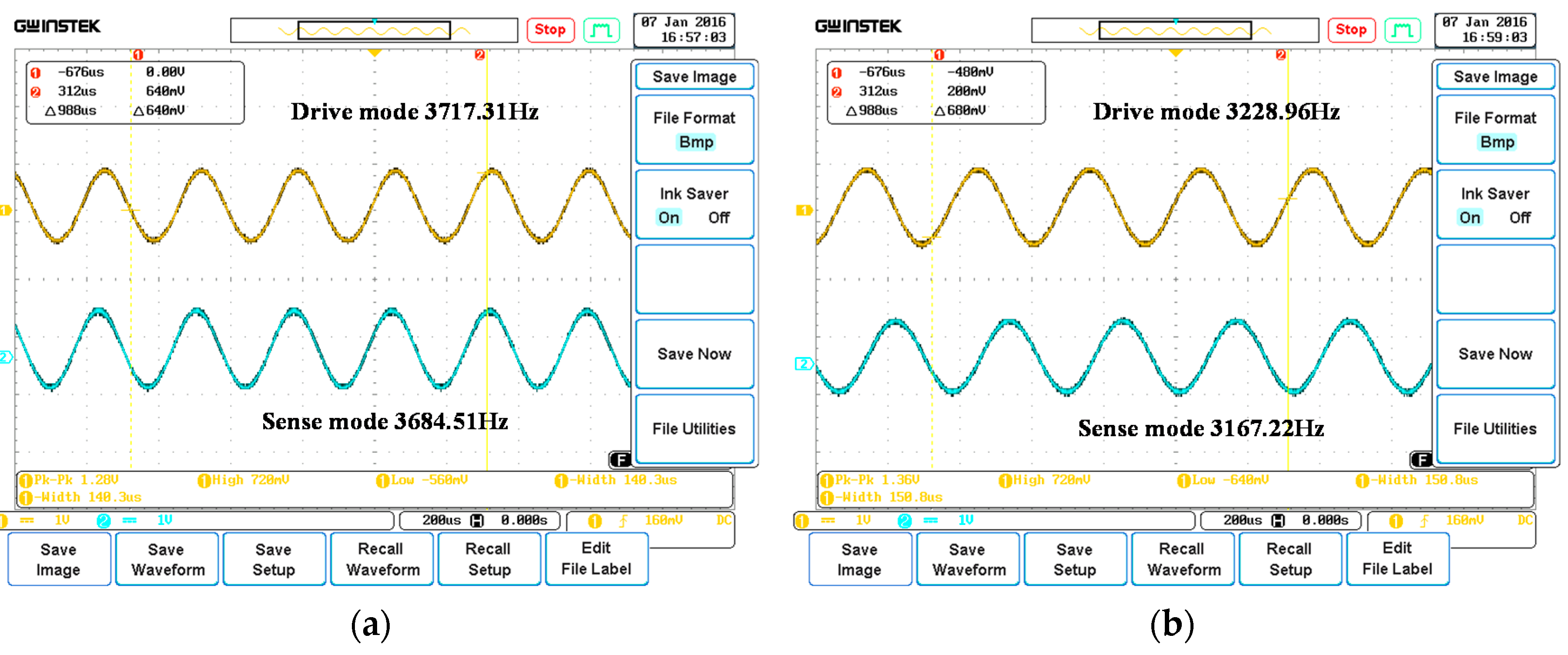
The gyroscope is fabricated by the silicon-on-glass (SOG) process. The upper layer of the gyroscope is the silicon structure ICP etched through the single crystal silicon bulk micromachining, while the lower layer is the glass substrate which is anodically bonded with the silicon structure. The gyroscope used in this work has a resonant frequency of 3195.1 Hz in drive mode and 3105.9 Hz in sense mode. The symmetric structure of the gyroscope is especially suitable for the implementation of the adaptive control algorithm proposed in [
4]. The detailed structure parameters of the gyroscope in this work are listed in
Table 1.
From the structure model it can be seen that the ideal micromachined gyroscope is a mass-spring-damping system with two independent modes. However, due to the inevitable fabrication errors of the micromachined structure, the actual gyroscope dynamic equation tends to be more complicated. Besides, the fabrication imperfection of comb fingers and beams will contribute to stiffness coupling, stiffness asymmetry, drive force asymmetry and displacement detection asymmetry,
etc. These structural errors will lead to undesired coupling of drive and sense modes, and even excite other sub-modes, for instance, the differential mode drive force asymmetry will make the proof mass to rotate around z axis. In such case, mechanical model of three freedom degrees system is considered in this paper to study the dynamic characteristic, as illustrated in Equations (1)–(3), and the schematic diagram of the gyroscope rotation mode, is also depicted in
Figure 1b.
The rotation mode:
where
x,
y is the displacement of the drive axis and sense axis,
and
is the vibration mass of these two modes,
is the value of proof mass,
is the rotary moment of inertia of the proof mass around z axis, and
is the rotation angle of the z axis.
,
are the normal stiffness coefficients of the drive and sense modes, and
,
are the coupling stiffness coefficients.
,
are the normal damping coefficients of the drive and sense modes, and
,
are the coupling damping coefficients.
and
are the feedback forces that attached on the drive mode and sense mode, respectively.
As illustrated in
Figure 1b,
and
are the damping and stiffness coefficient of rotation mode.
and
represent the asymmetric drive forces of the drive and sense axes,
and
are the vibration components that couple from the drive and sense modes to the rotation mode.
and
are the force that calculated to compensate the asymmetric components,
and
are the arms of the differential drive forces,
indicates the different sides of the electrodes,
is the dimension parameter of the gyroscope, representing the projection on these two axes of the distance from the beam bearing point to the vibration mass centre:
where
and
represent the rotation mode coupling coefficients of drive and sense modes,
and
are the drive force asymmetric coefficients of drive and sense modes. As depicted in
Figure 1b,
is the proof mass,
and
are the masses of the fingers and frames that vibrate in the two modes respectively. Thus
and
are equal to
and
in Equations (1) and (2) respectively.
and
are the resonate frequencies of the drive and sense mode respectively. From the equations of the dynamic characteristics of the gyroscope, it can be concluded that the drive and sense modes are coupled with each other, and the
z-axis mode is influenced by different kinds of disturbances and fabrication imperfections.
Due to the existence of the rotation mode, the measured displacements of drive and sense modes are contaminated by the projection of the rotation movement on the other two modes. Assuming
,
to be the displacements of
x and
y that influenced by the rotation mode,
and
are the beam fabrication asymmetric coefficients, then we get:
Considering the control algorithm formation of the drive and sense modes, the gyroscope used in our experiment is double decoupled dual-mode micromachined gyroscope. The drive and sense modes are designed symmetrically, thus the adaptive control algorithm applied on the two modes is also symmetric.
The reference model of the gyroscope is defined as two ideal oscillators, which will remain stable vibration at certain frequencies [
4]. The dynamic equations of the ideal reference model can be written as:
where the stiffness matrix
is:
The elements on the leading diagonal are the stiffnesses of the two modes, and the vector
is:
Equation (12) represent the displacements of the ideal gyroscope structure.
Considering the coupling terms and the Coriolis force aroused from the input angular rate, the model of the physical gyroscope mechanical structure can be expressed as:
In Equation (13) is the damping matrix, is the stiffness matrix, and is the matrix constructed from the input angular rate. is the vector of the drive force that attached to the drive electrode fingers of the gyroscope.
Define
R to be the estimation error between the actually stiffness matrix and the reference model:
Due to the fabrication imperfections, small cross-coupling terms still exist between the two modes. In the matrix, the coupling coefficients and , and are not necessarily equal to each other, respectively, thus an algorithm that can deal with each components correspondingly is of great importance.
3. The Adaptive Control Algorithm
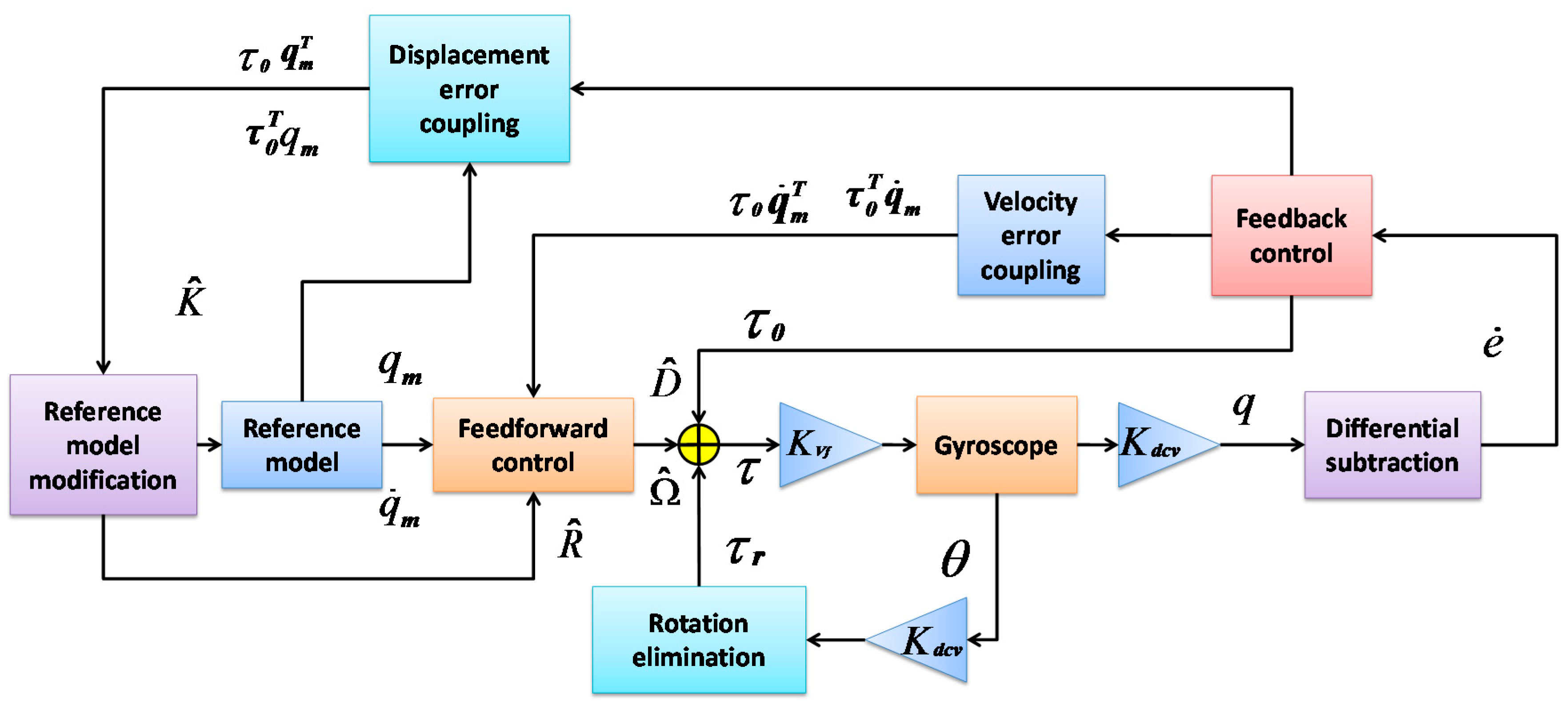
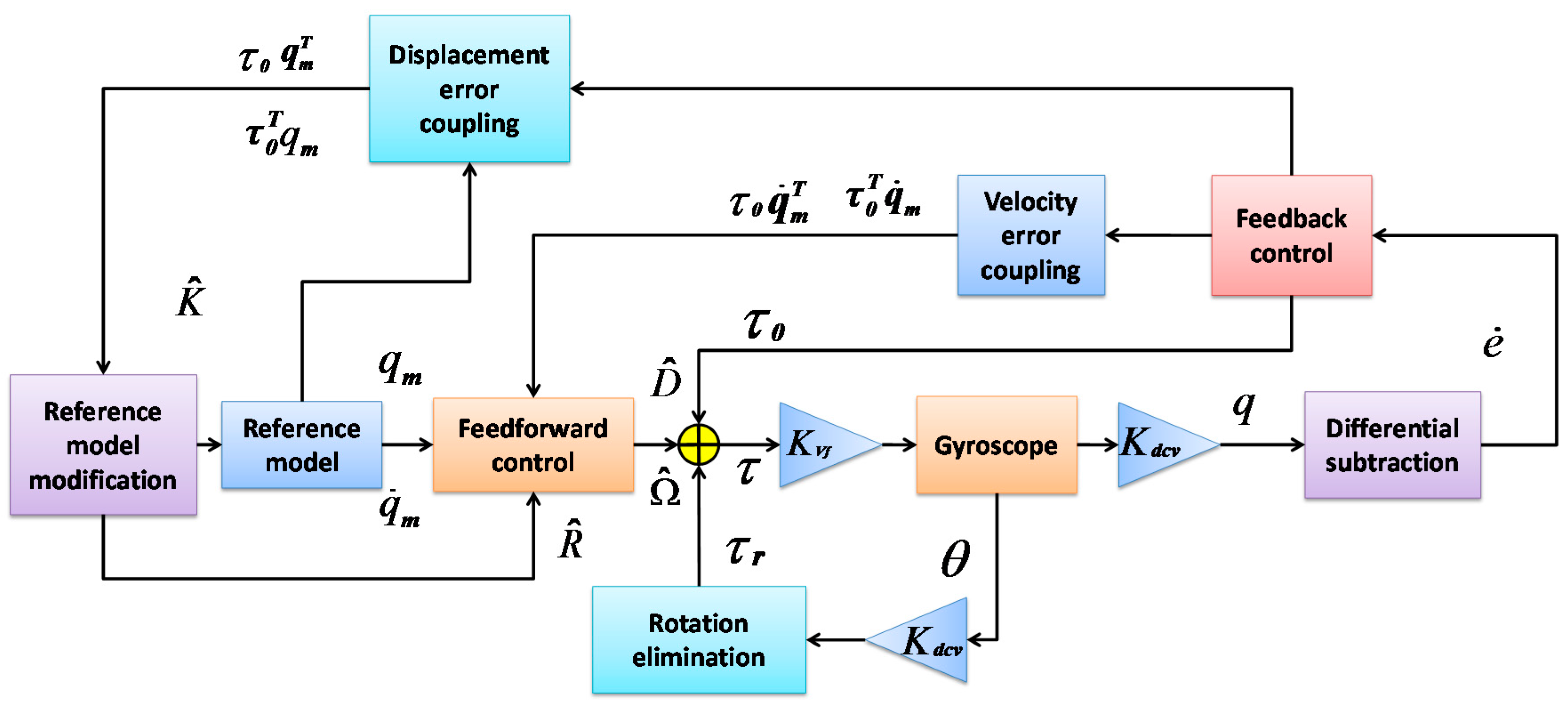
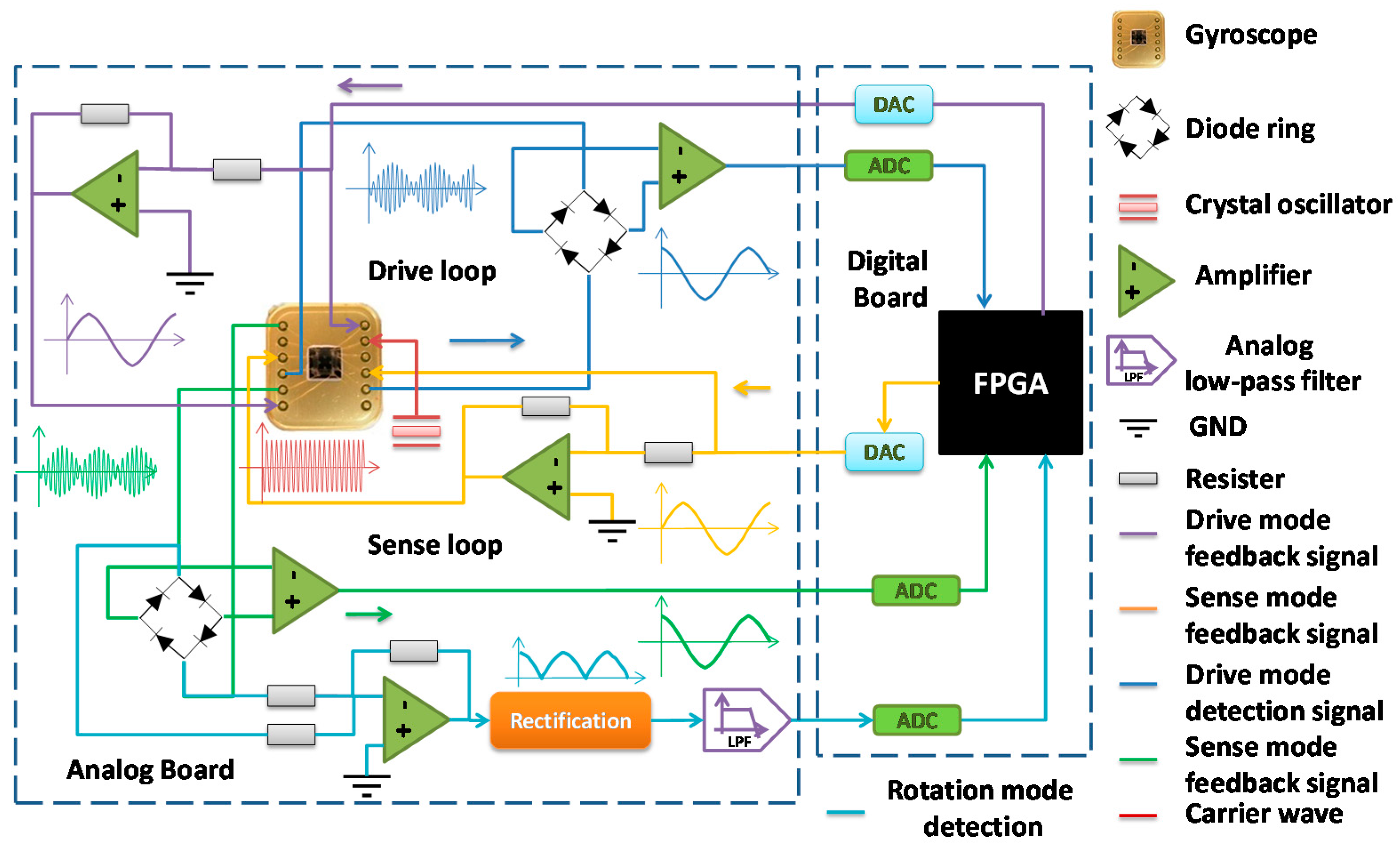
By comparing the output signal of the reference model and the physical gyroscope, first the tracking error can be obtained. With the proper adaptive law, the estimated parameters are then corrected, thus the parameters are estimated precisely and the feedback control force can be generated through the estimated parameters of the gyroscope, and finally the system is well controlled.
The block diagram of the whole system is shown in
Figure 2 , where the differential subtract block compares the velocity outputs with the actual gyroscope and the reference model, and generates an velocity error
e, which contains the information of parameter estimation error:
The reference model modification section calculates the estimated stiffness matrix, which is used to control the vibration frequency of the reference model. The feedback control block further generates a direct feedback signal, i.e., the velocity error, which acts as the first feedback signal.
The control law is designed to be implemented in discrete domain. Define the sampling index
k, and the sampling time
, the differential subtraction section provides the estimation error
, and multiplied directly by the feedback coefficient
i.e.,
Meanwhile, the velocity error coupling and displacement error coupling modules are multiplied by the feedback components with the corresponding velocity or displacement signals respectively, then to provide the upgrade amount of different elements in the parameter matrix. In the feedforward control section, the signal that can be used to compensate the coupling and damping disturbances are finally generated, are modulated with corresponding sinusoidal waves and sent to the two modes.
Assuming
to be the estimated value of matrix
, and
to be the estimation error of the three matrixes, respectively. A positive definite Lyapunov function is chosen as shown in the
Appendix B. In the practical conditions, the coupling coefficients on the anti-diagonal of the parameter matrices are not necessarily equal to each other, and the control law will decouple each of the coupling coefficients, respectively. To make the Lyapunov function semi-negative definite, the adaptive control law can be chosen as:
The Lyapunov stability analysis of the algorithm is illustrated in the
Appendix B. The final output angular velocity signal is derived by integral calculation:
elements on the counter-diagonal of the matrix
is the estimated angular velocity.
The reference model modification block estimates the normal stiffness and coupling stiffness of the two gyroscope modes, which will be utilized by the reference model and the feedforward control module.
To maintain the gyroscope working conditions stable, two phase-lock-loop sections are applied in each vibration mode. Each PLL contains a numerical control oscillator (NCO), which generates sinusoidal wave with calculated frequency and phase. Rather than two ideal oscillator models that are illustrated as in Equation (10), the output signal of NCO has a constant amplitude, which will make the algorithm easier for implementation without affecting the Lyapunov stability.
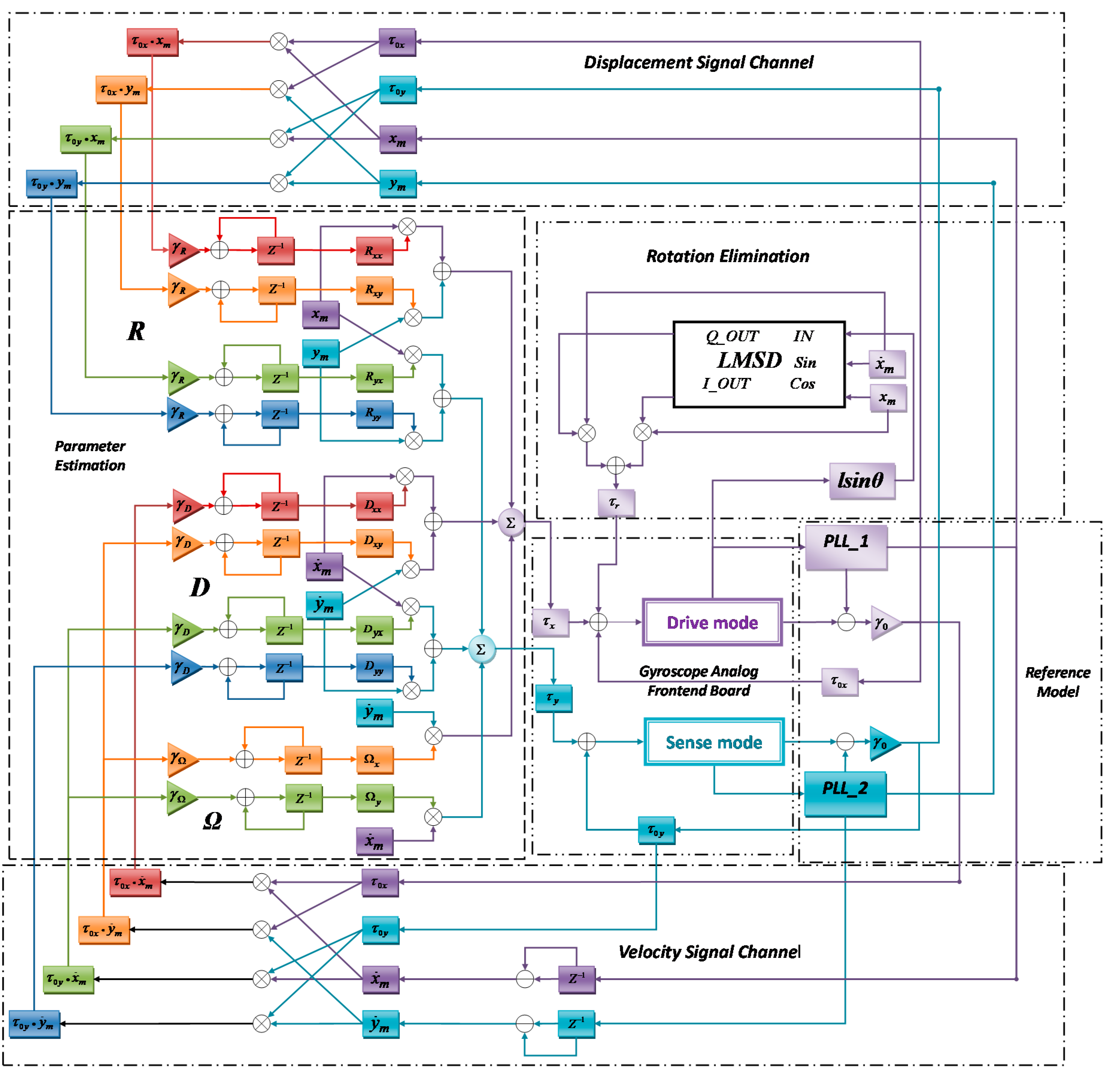
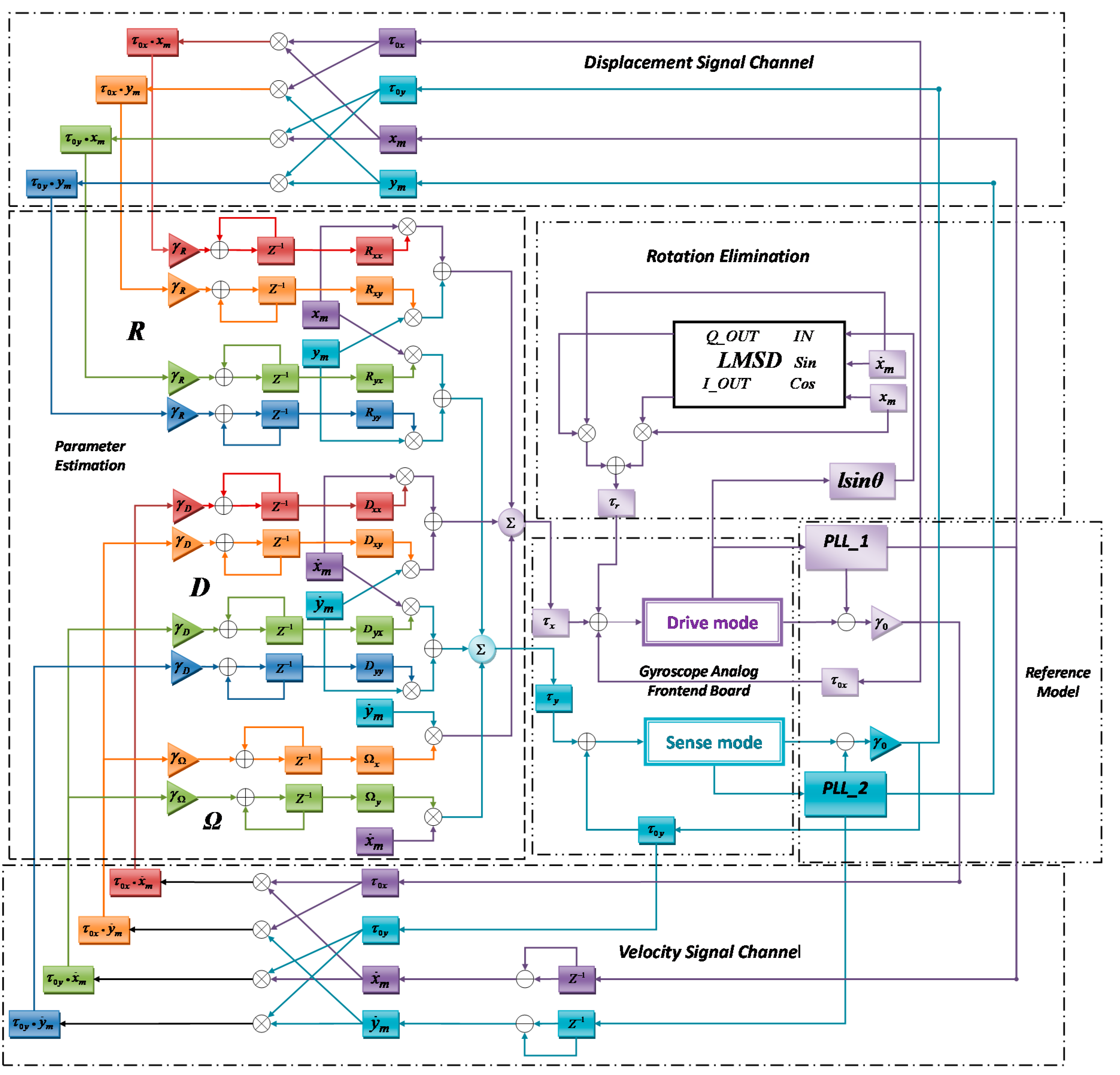
The detailed flow chart of the adaptive control algorithm of the gyroscope system is shown in
Figure 3. With two PLLs acting as the reference model, the control error information can be transferred to estimate different parameters through the displacement signal channel and the velocity signal channel. Additional differential detection section is attached at the drive mode to collect rotation angular information so that the least mean square demodulation (LMSD) section can generate signal
to eliminate such an undesirable rotation.
To fulfill the designed adaptation law, the feedforward control module is designed to update the parameter estimation and generate the final feedforward signal. The final gyroscope angular rate output is also generated from the module. The total drive signal
is attached on the drive fingers of the two modes. It consists of three parts including the feedforward signal, the feedback signal
, and the rotation eliminate signal
,
i.e.,
where
is defined as:
Components of the drive signal have different frequency and phase, in such case the add operation will not severely increase the total drive signal amplitude or make the digital amount overflow. To eliminate the rotation components, the rotation elimination circuit is specially designed. In Equation (3) assume
and to cancel off the coupling force components in different modes, then we get:
Since the frequencies of the asymmetric drive force and the stiffness coupling components are different, the gyroscope is forced to rotate with the mixture of these two frequencies. The demodulation algorithm is applied in both modes to figure out the rotation components of each frequency and generate the compensation forces
and
of each frequency. Substituting Equations (6) and (7) into Equations (26) and (27), then we get:
By applying small-angle approximation in Equations (8) and (9), it can be written as:
The unmatched signals of the drive modes and sense modes are measured from the gyroscope detection pins by signal condition circuits and calculated in the FPGA chip. Although the frequencies of the signals are predictable, the phases of the detected signals remain unknown. Due to the fabrication variation, the coefficients of the gyroscope structure are not measureable, thus a demodulation method is applied to estimate the amplitude of the signal. Here the LMSD algorithm is applied in both modes. The demodulation reference signals are provided by the reference model, the calculated results are multiplied with a pair of quadrature reference signals to generate the appropriate rotation elimination signal .
The rotation angle
contains the frequency components of both modes oscillation frequencies. From the detection output port of each mode, the differential signal is demodulated with a pair of quadrature sinusoidal or cosine signals of a certain frequency. Assuming the detected rotation signal is
, it contains different frequency components of
and
, with the corresponding magnitude of A, B, C, E, respectively. By applying the LMSD algorithm, the rotation signal can be easily decomposed and recombined with two quadrature reference sinusoidal signals:
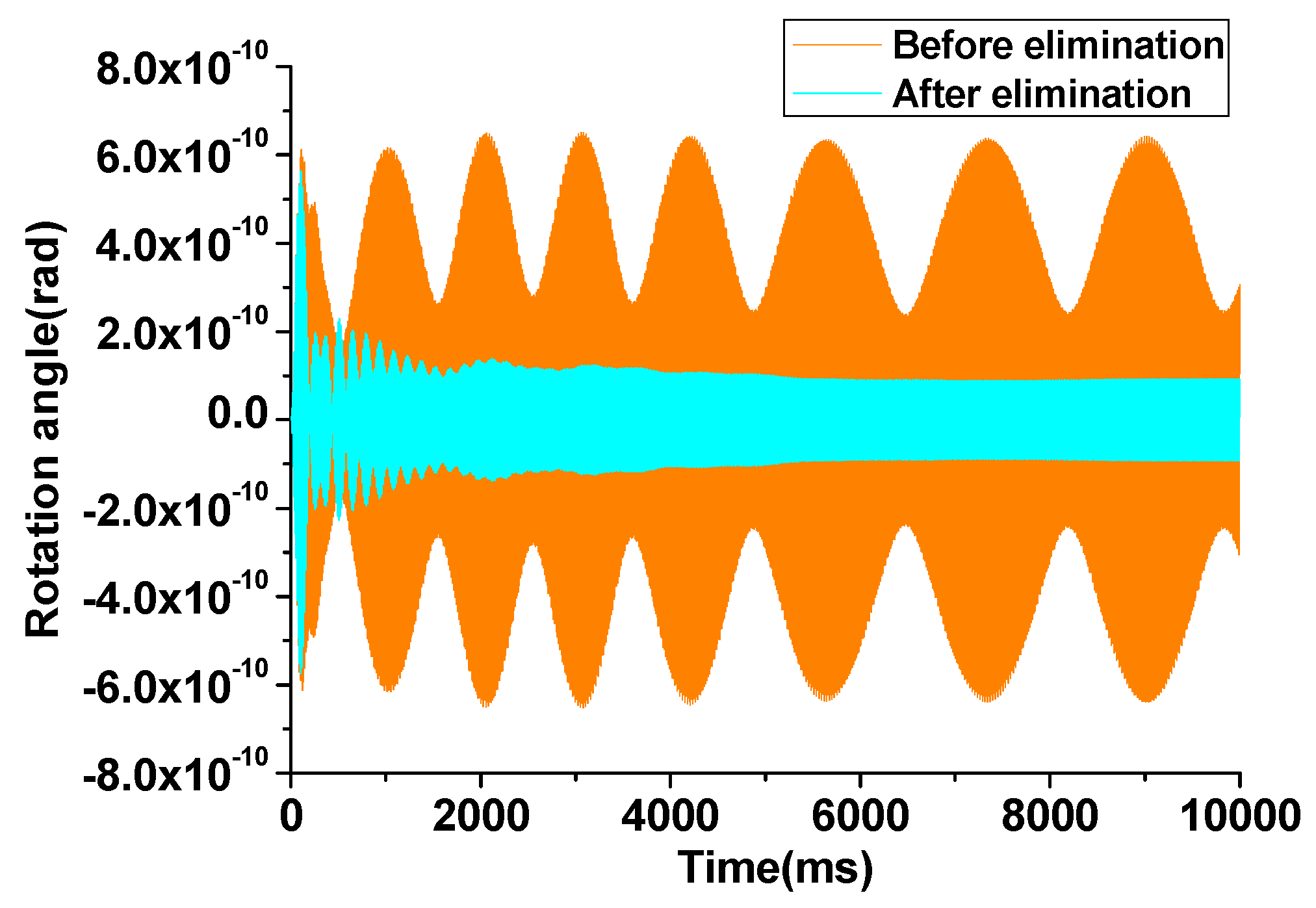
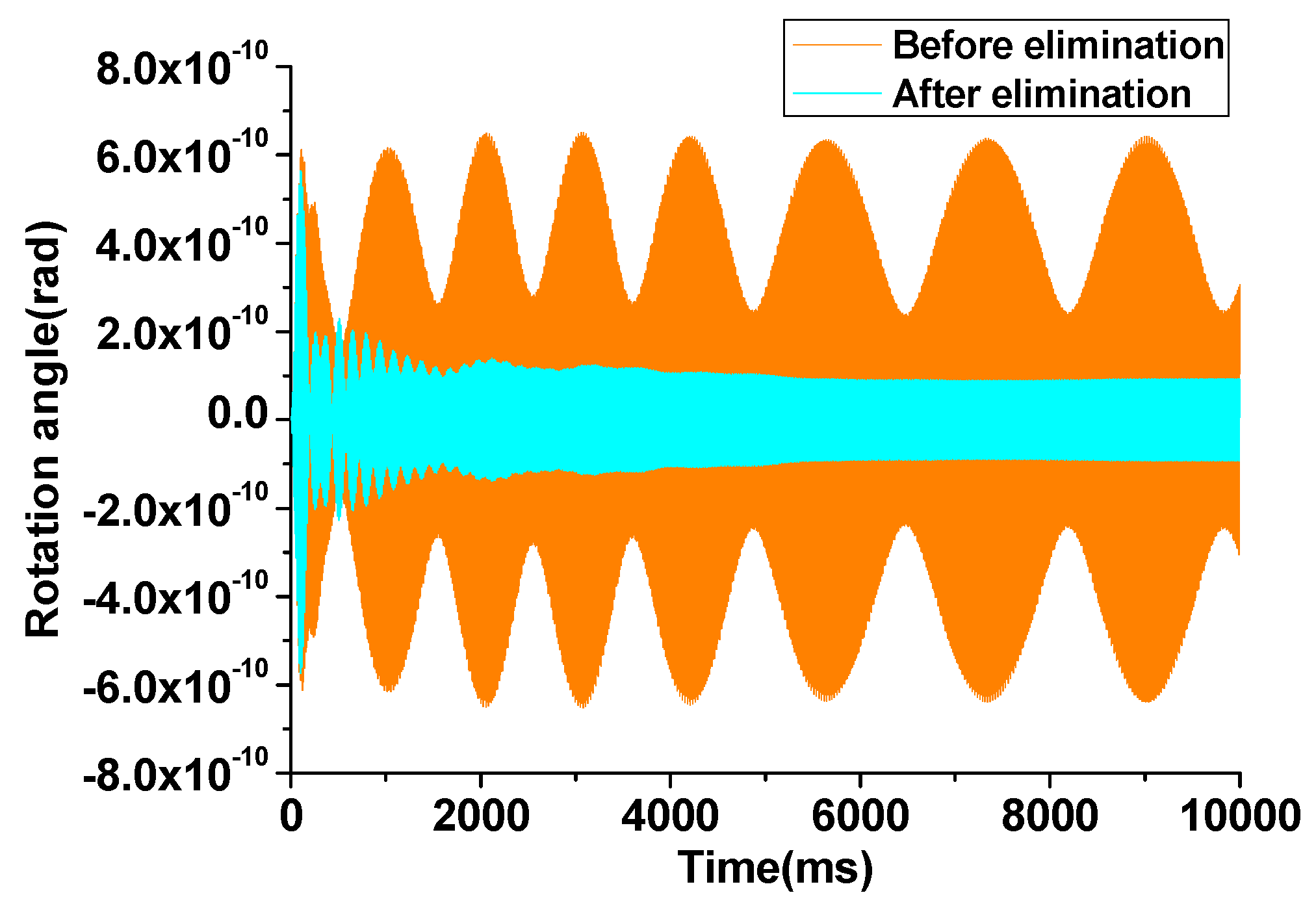
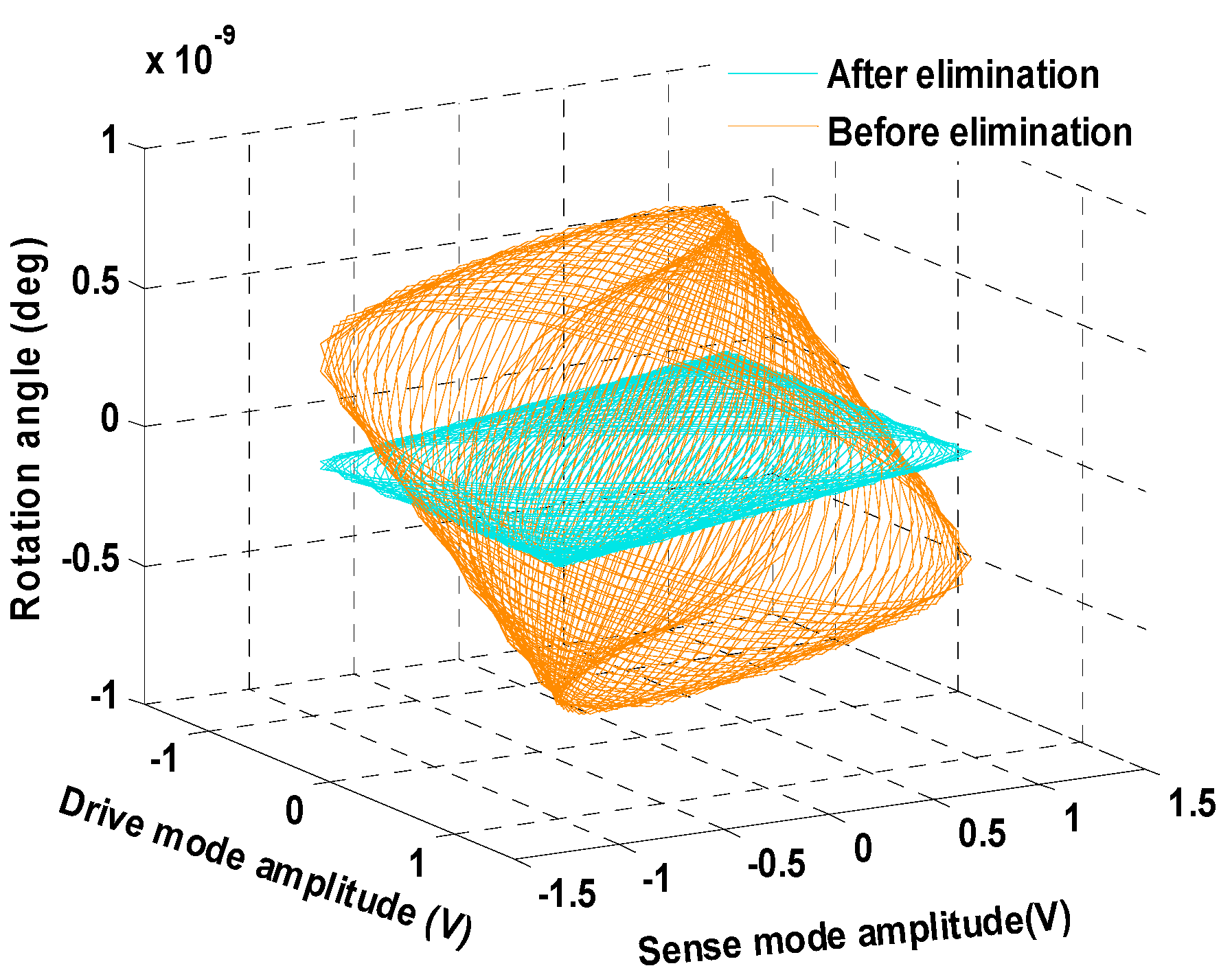
From Equation (32) it can be seen that, although the original frequency components cannot be restored, the force components that are acquired to eliminate the rotation are calculated in real time and can be attached to the drive fingers of the corresponding mode. With the utilization of the rotation elimination circuit, the unexpected rotation of the proof mass can be effectively suppressed to be less than
rad, compared with the former angular output of
rad. The rotation angular output and the Lissajous trajectories for tri-modes are depicted in
Figure 4 and
Figure 5, respectively.
From the simulation result illustrated in
Figure 4 and
Figure 5, it can be concluded that the algorithm based on the LMSD can effectively suppress the rotation mode of the gyroscope. With the differential movement of exited by the rotation is suppressed, the gyroscope works at a more stable condition and the control and measurement precision is also enhanced.
In terms of different modes displacement detection, the differential mode signals are extracted in the drive and sense modes, while the common mode signal are picked out in the rotation mode. In this case, the asymmetric displacement of drive and sense modes are only generated by the asymmetric drive force, i.e., their rotation angle and linear displacement signals are totally decoupled. Therefore, the rotation elimination circuits are relatively independent of the adaptive control circuits for the drive and sense modes.
Theoretically, the Lyapunov stability of the adaptive algorithm controlled system is not affected by rotation section. The main parameters and coefficients of the simulated system are listed as in
Table 2. In the implementation process of the algorithm, apart from the coefficients of the mechanical-electrical interface and the parameter of the gyroscope dynamical model, all the variables and coefficients are calculated or stored in the FPGA chip.
Compared with the conventional adaptive control algorithm proposed in [
3], the modified adaptive control algorithm proposed in this work has the following improvements: the adaptive law is redesigned to suit the asymmetric condition; rotation elimination section is added to suppress the differential components in the detection signal; the reference model is replaced with two NCOs and the modified adaptive law has a simpler arithmetic structure, the algorithm is more suitable for FPGA implementation.
4. Algorithm Simulation
Simulation of the adaptive control based gyroscope system consists of two steps. The continuous domain simulation verifies the adaptive control algorithm and the digital domain simulation based on the DSP builder tool provides convenient conversion from control algorithm simulation to hardware program language realization.
Simulation system is built in Simulink to investigate the performance of the proposed algorithm. Changing of the gyroscope parameters is simulated to verify the adaptive characteristic of the algorithm. The influences of the coefficients on the gyroscope system performance are also compared in this section.
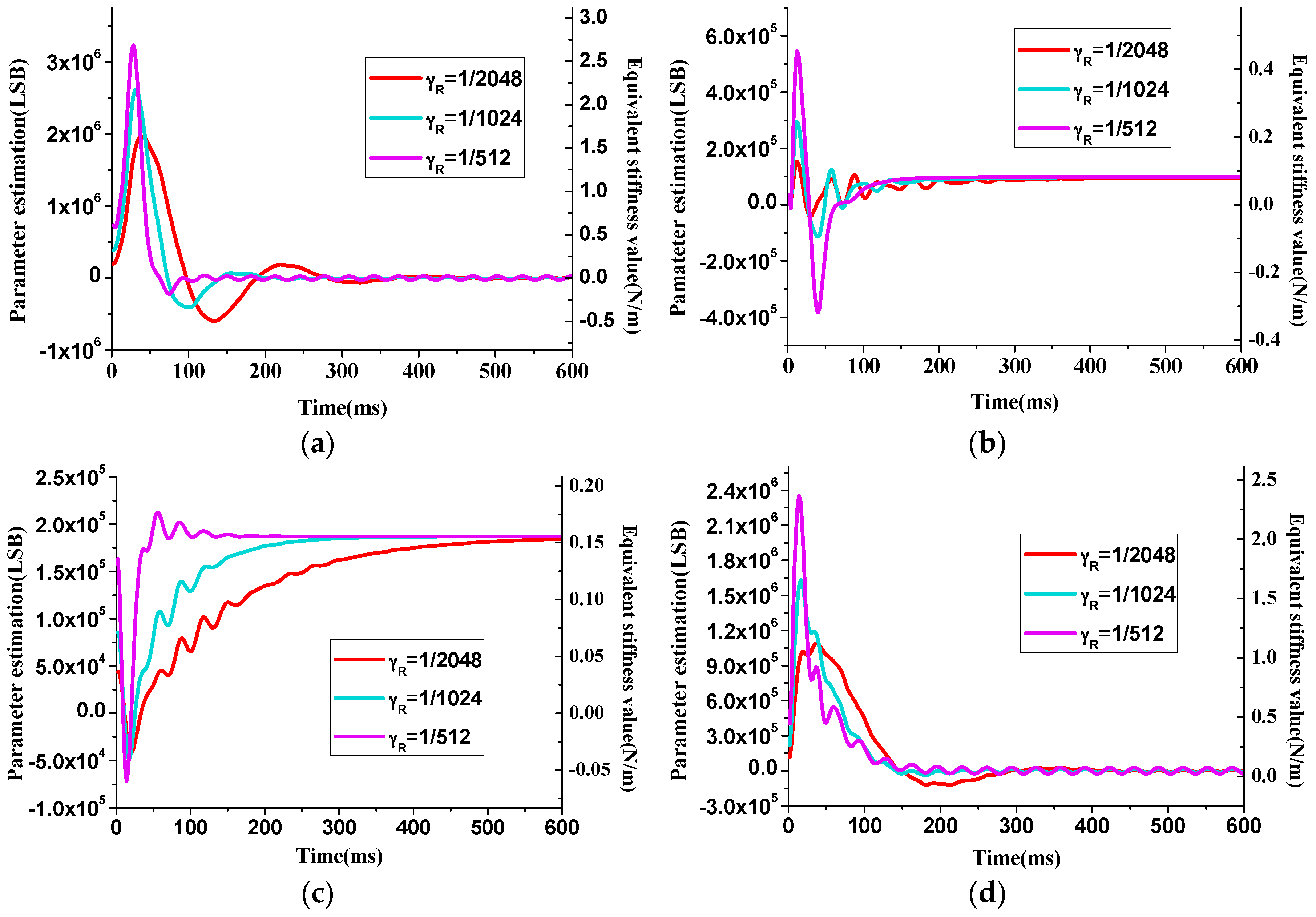
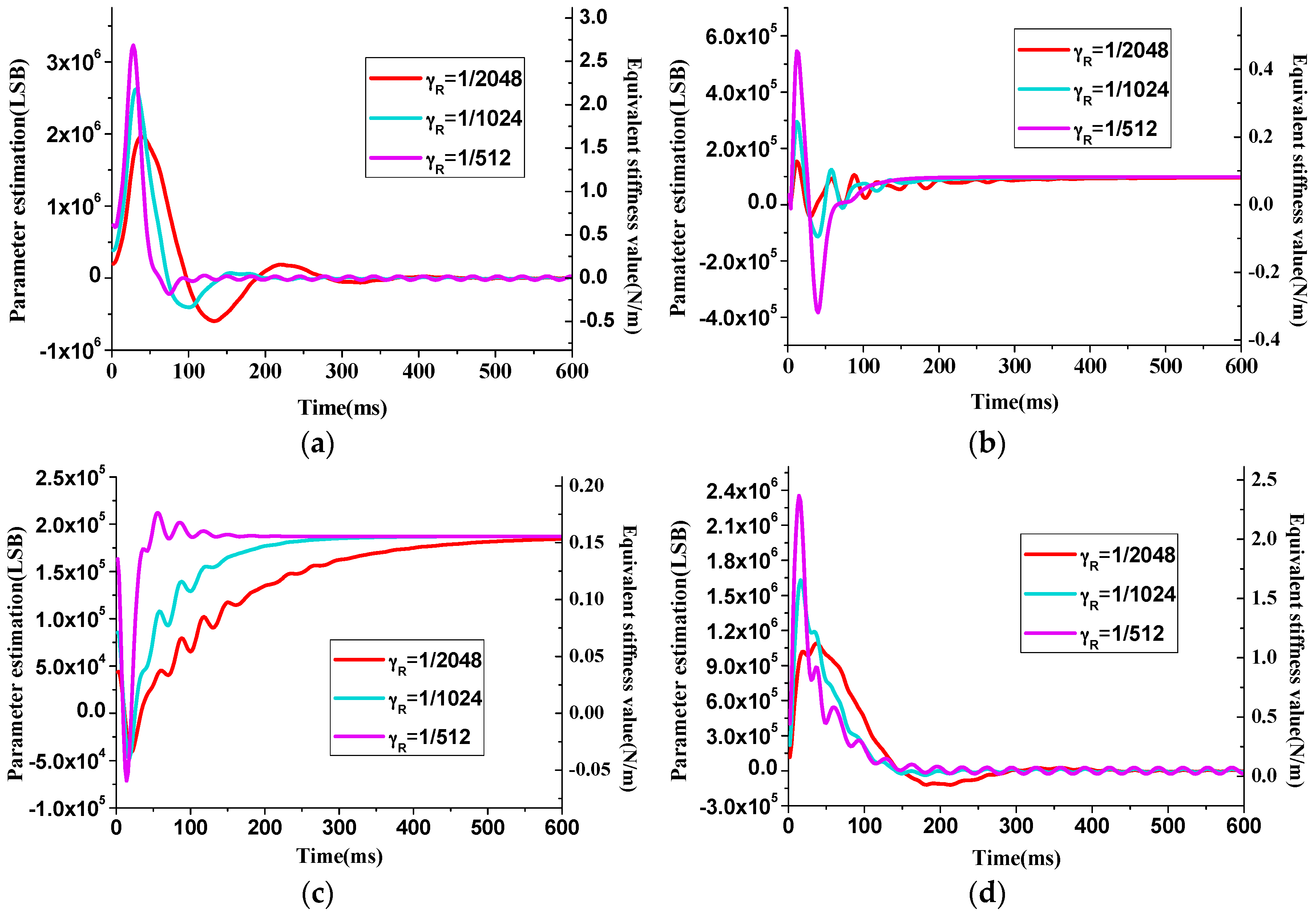
The value of
and
will also affect the estimation convergence speed of
R and
D matrix, respectively, as shown in
Figure 6 and
Figure 7. From the curves that represent estimation processes with different
values, it can be inferred that larger
can provide faster stiffness estimation but has larger overshoot and may result in overflow of the digital output signal.
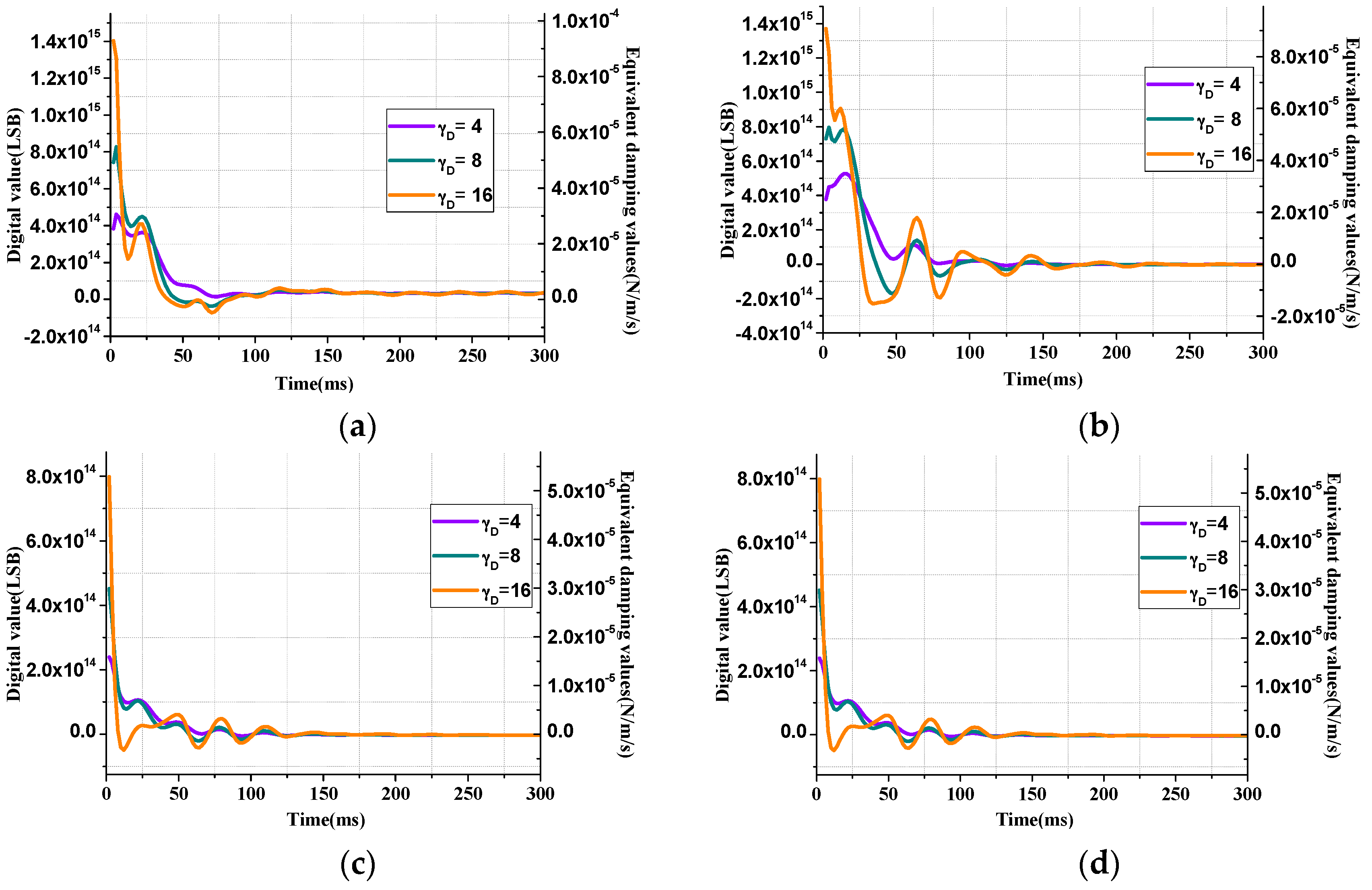
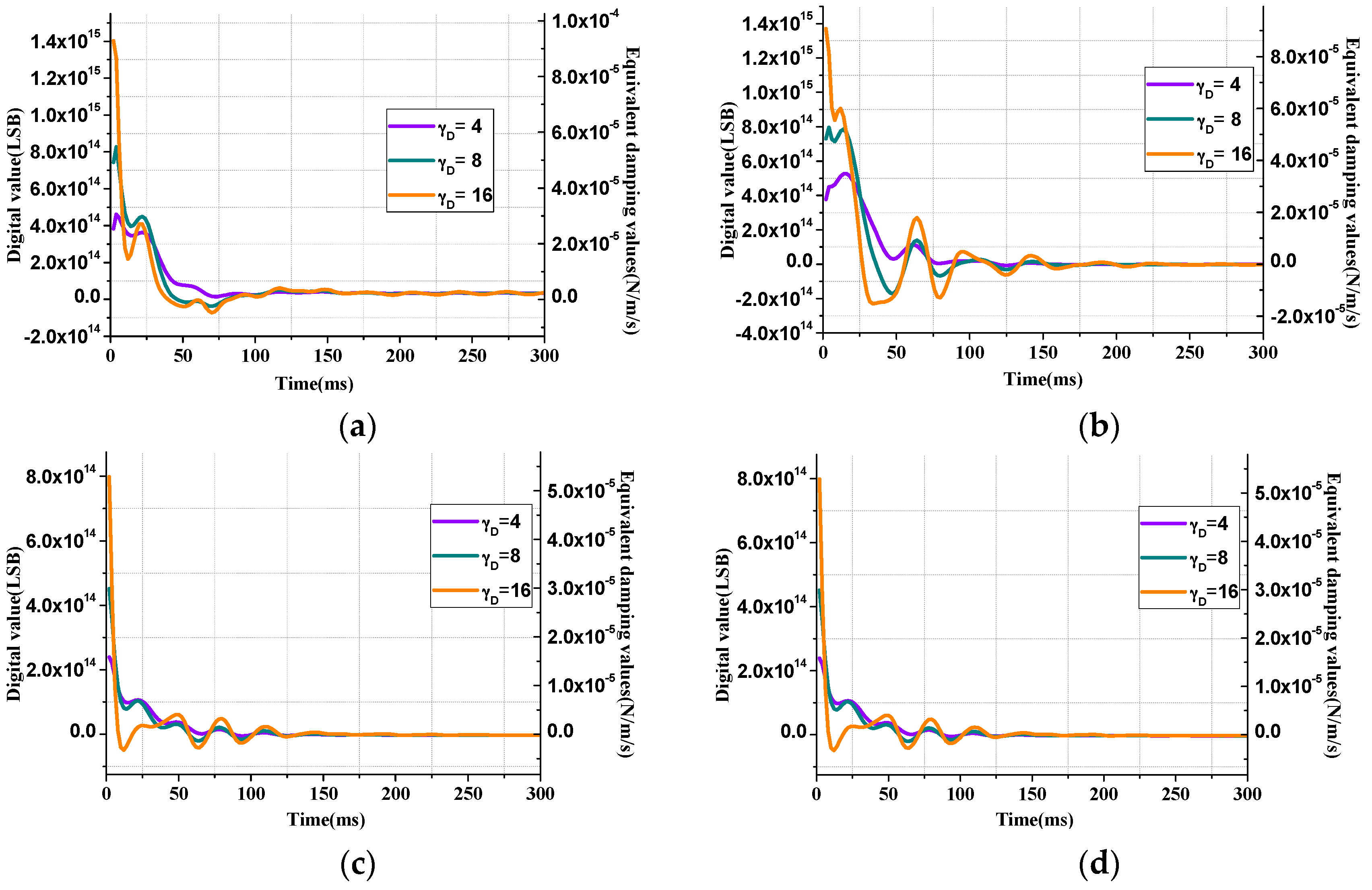
Like the case of
value,
also has the influences on the overshoot and estimation time. Moreover, the estimation result of damping components are multiplied by the velocity of the reference model, in such case, the system vibration condition is sensitive to the signal. When
value is too large, such as the orange curve in
Figure 7d, ripples will emerge in the parameter estimation result, and the amplitude control process is disturbed.
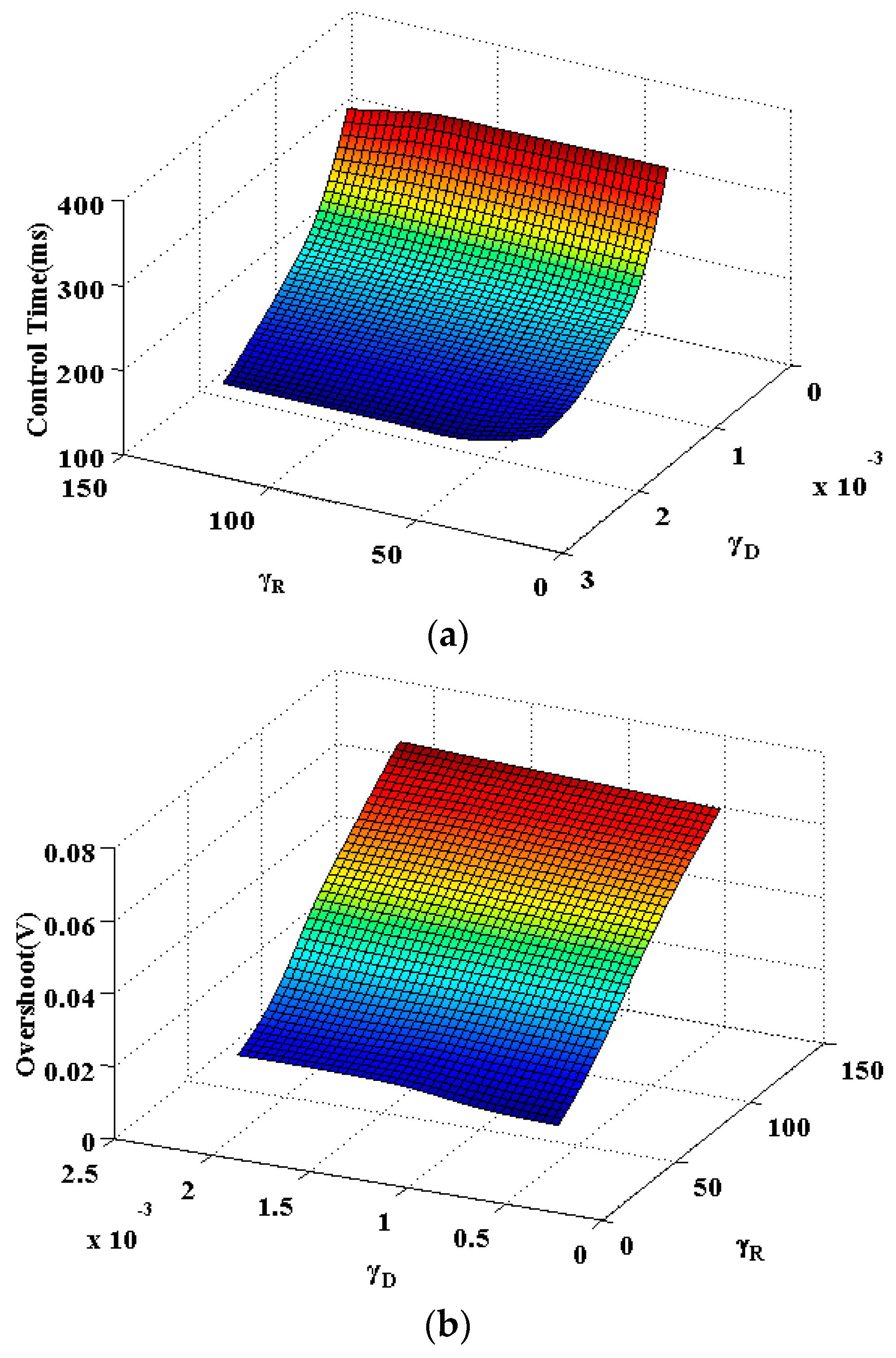
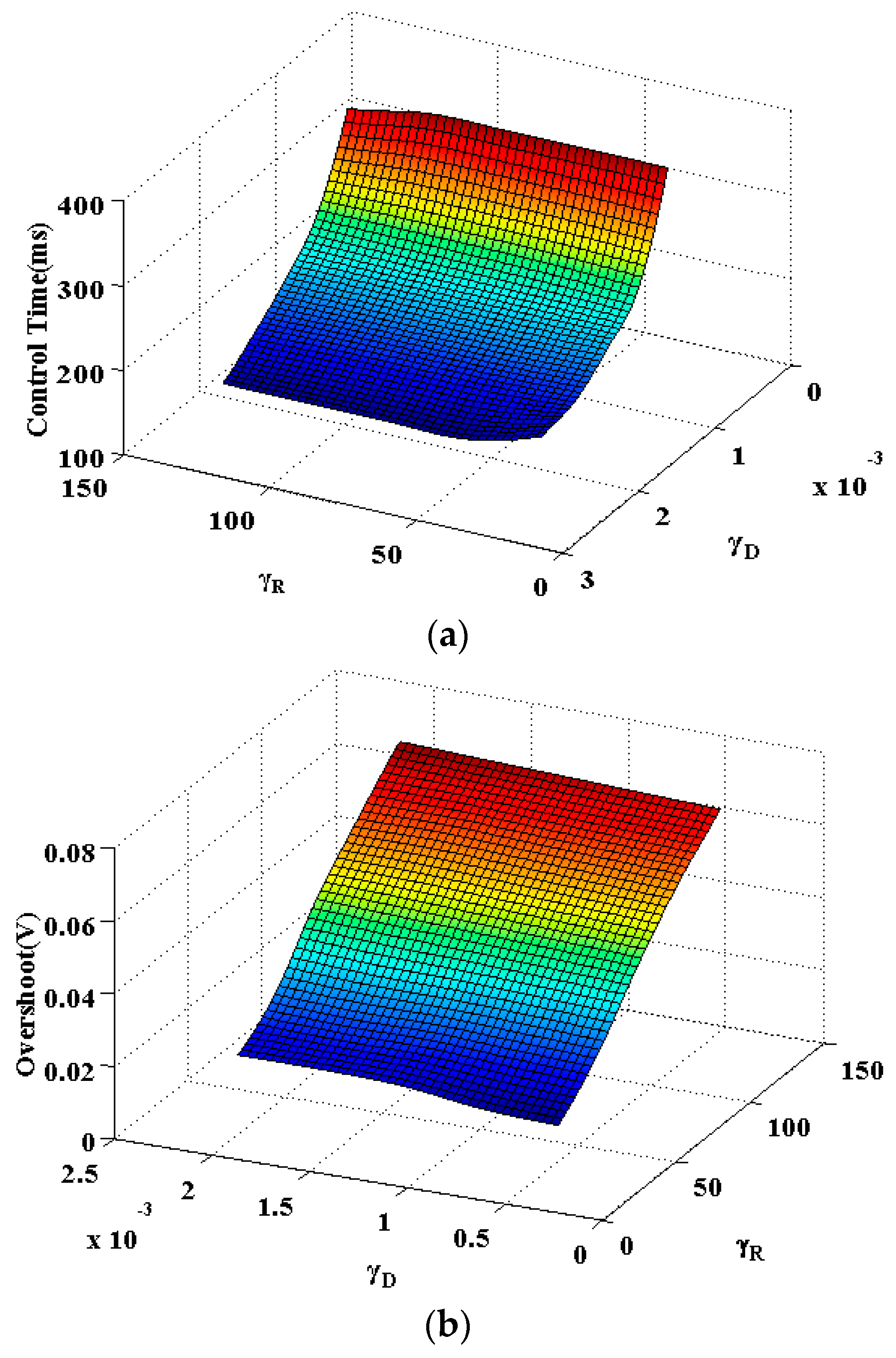
From
Figure 8 it can be concluded that
will influence the maximum overshoot during the start-up period and
value mainly relates with the time consumption of the amplitude control. The adaptive algorithm coefficients
,
will influence the amplitude control speed of the start-up process, thus a proper combination of these two values is necessary. After a trade-off is made between the control time, overshoot and the proper estimation of parameters that illustrated in
Figure 6 and
Figure 7, the coefficients are finally determined with a multi-object optimization function [
12,
13].
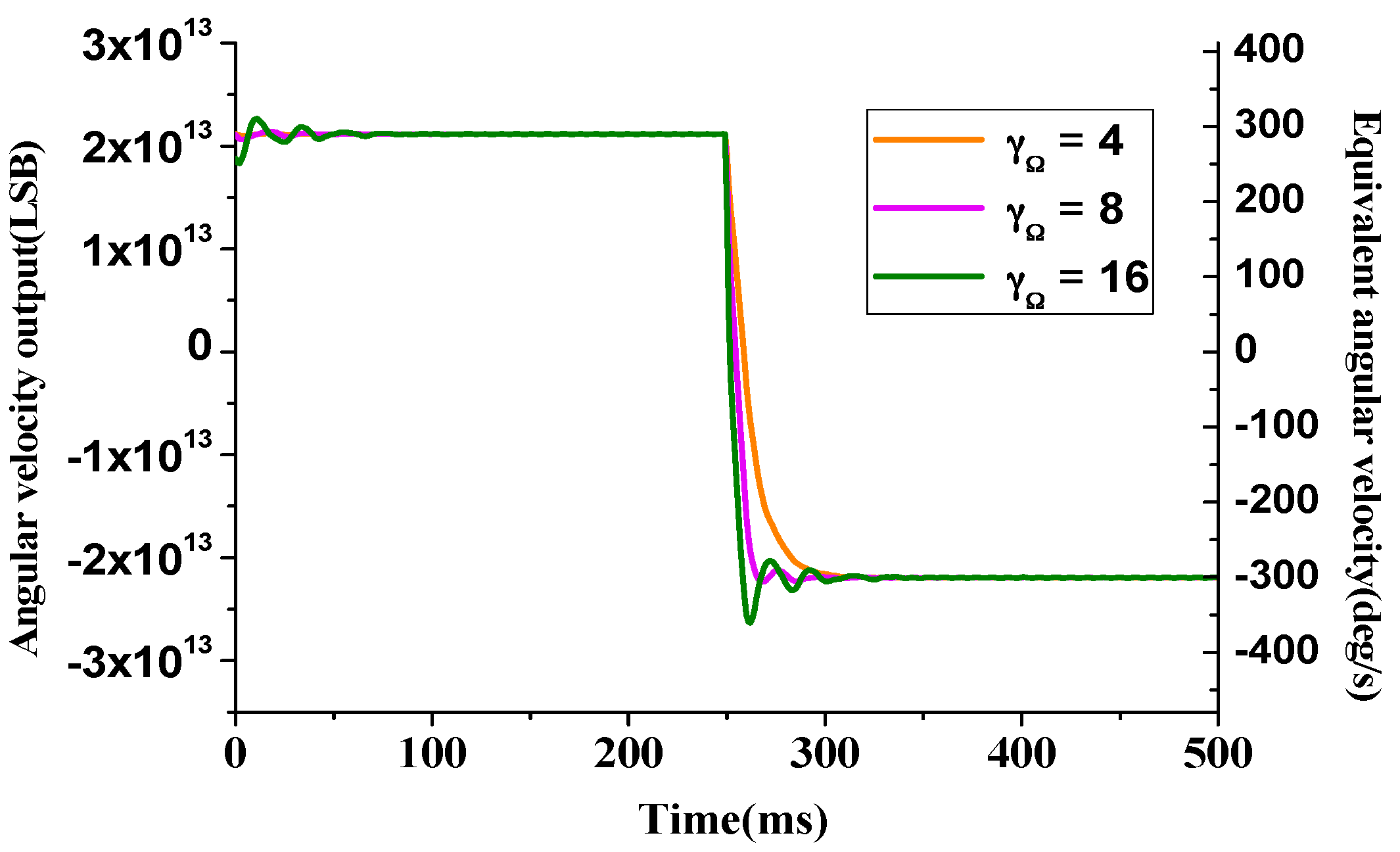
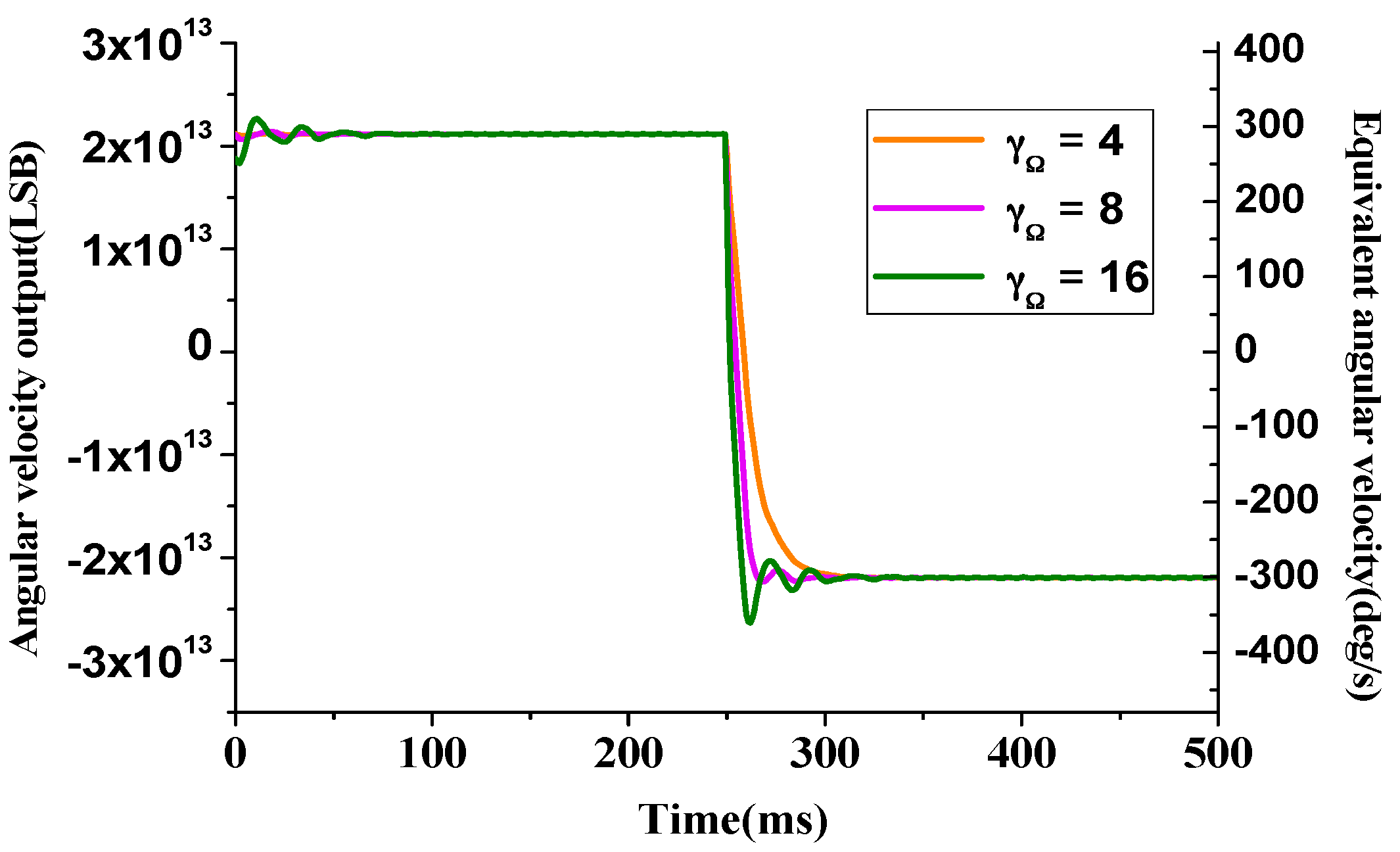
To further investigate the speed performance of input angular rate estimation, the angular rate estimation function is tested with the ±300°/s step-formed input signal. The angular rate estimation parameter can affect the slew rate and overshoot of the angular rate, as depicted in
Figure 9.
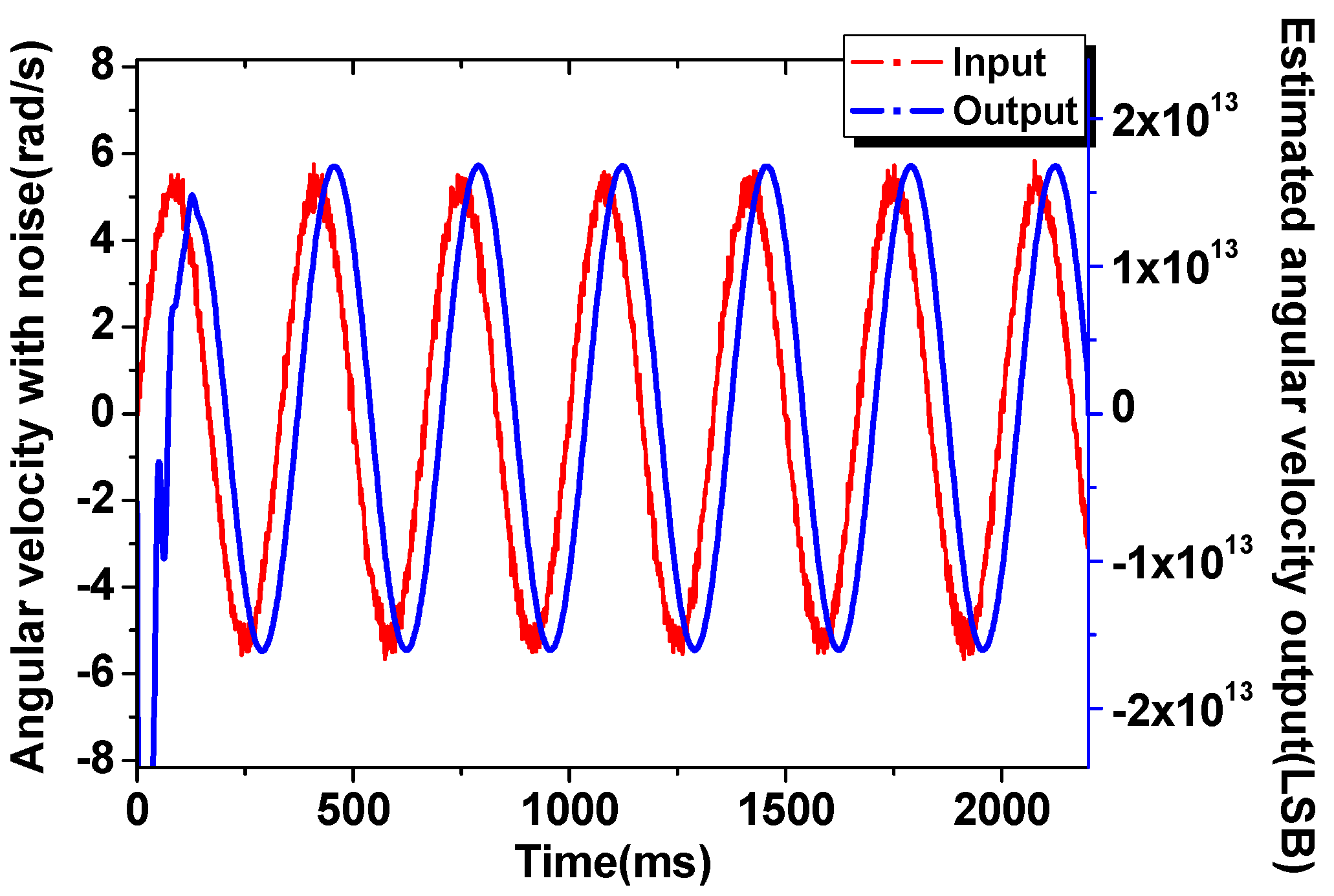
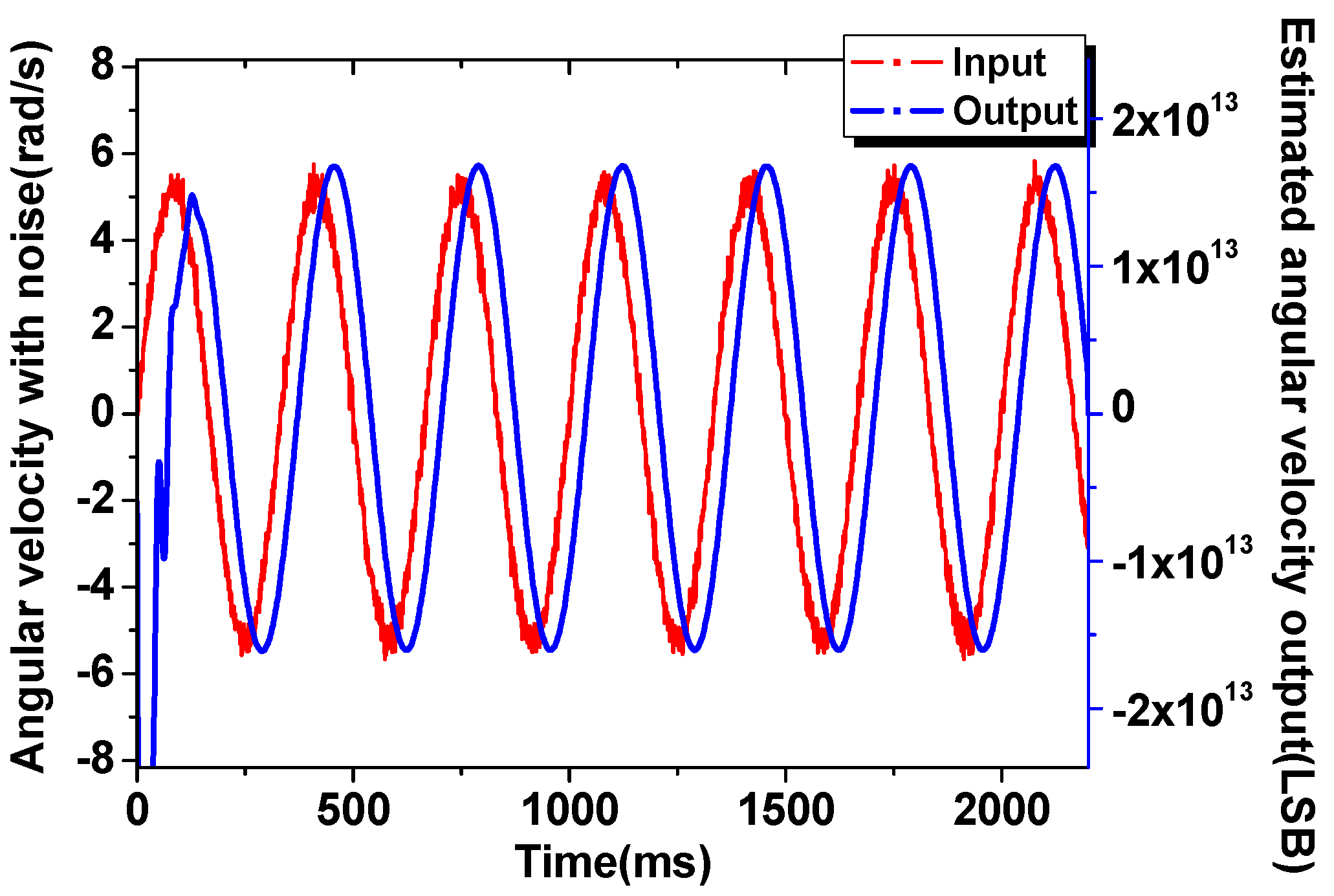
With the integral effect, the adaptive control method also has a fine performance against the input noise, from
Figure 10 it can be calculated that, the white noise mixed with the input signal are effectively suppressed to obtain the clean output angular rate estimation signal, and specifically the SNR (Signal to noise ratio) has been greatly enhanced from 49 dB to 90 dB.
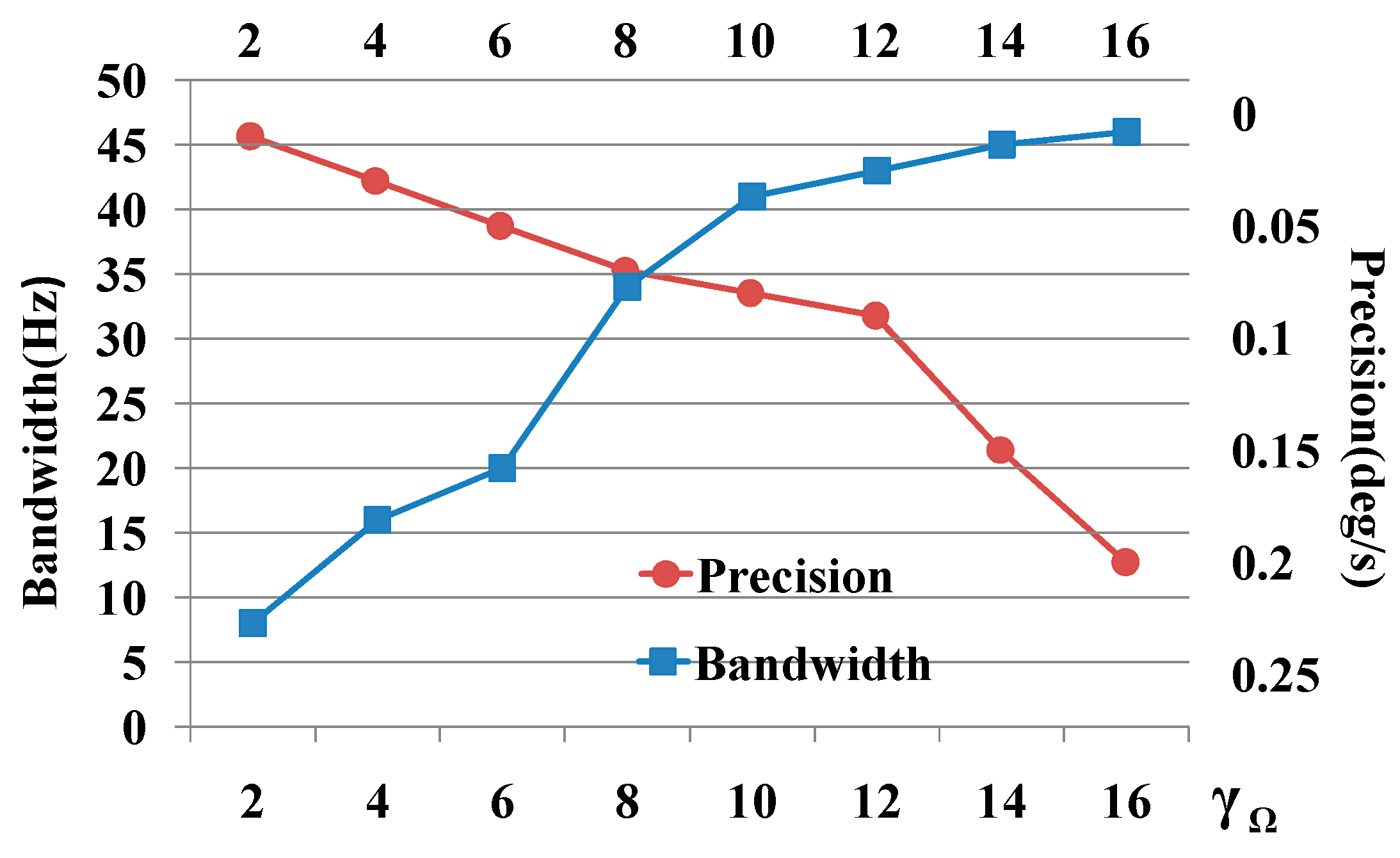
In the other hand, is also simultaneously related with the measurement precision and bandwidth of the gyroscope system. These two characteristics are contradict against each other, thus a trade-off should be made according to the expected application of the gyroscope system.
As shown in
Figure 11, to meet the gyroscope application requirement, the bandwidth should be more than 40 Hz, and the measurement precision should be higher than 0.1°/s, finally we choose the
value as 12.
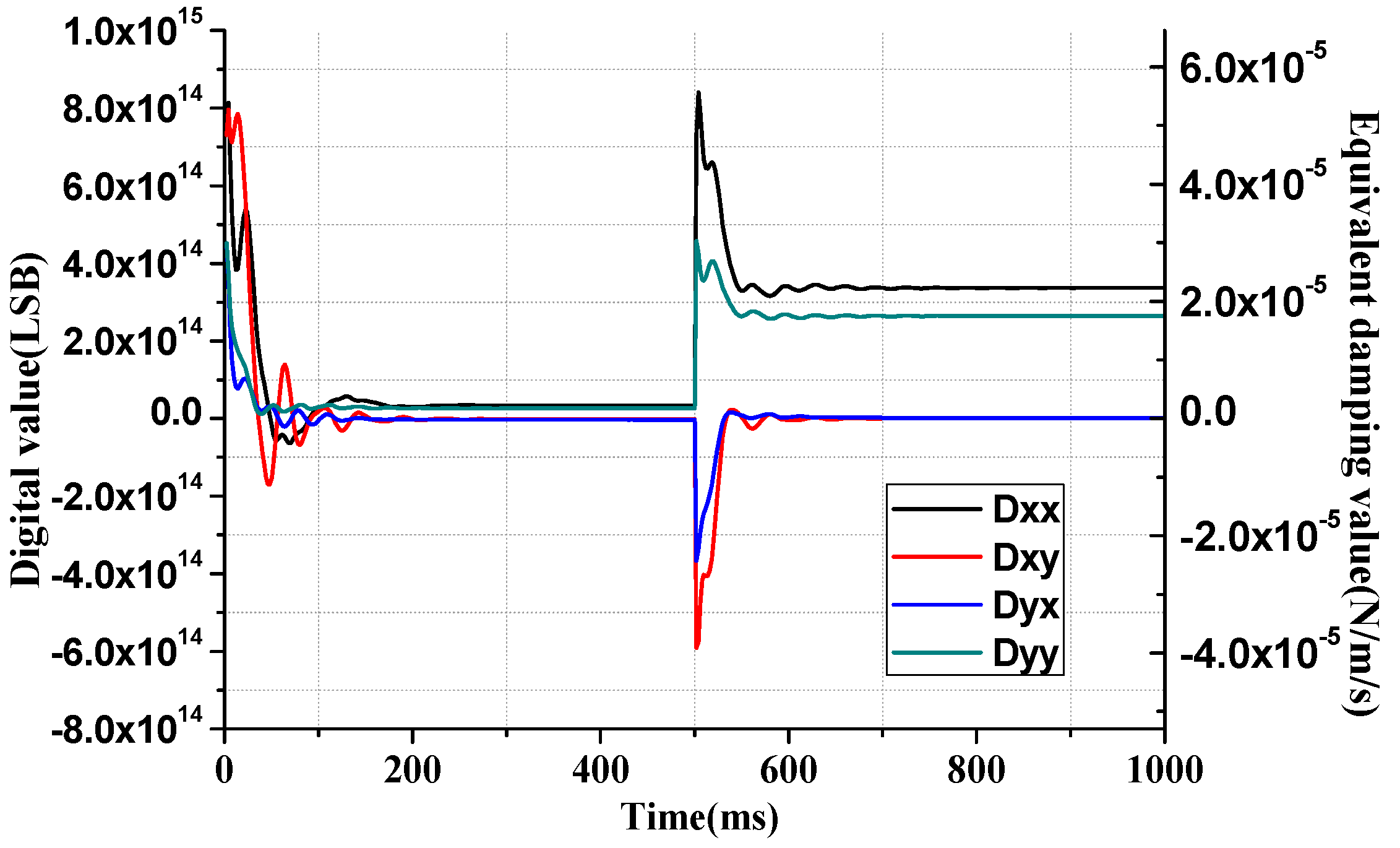
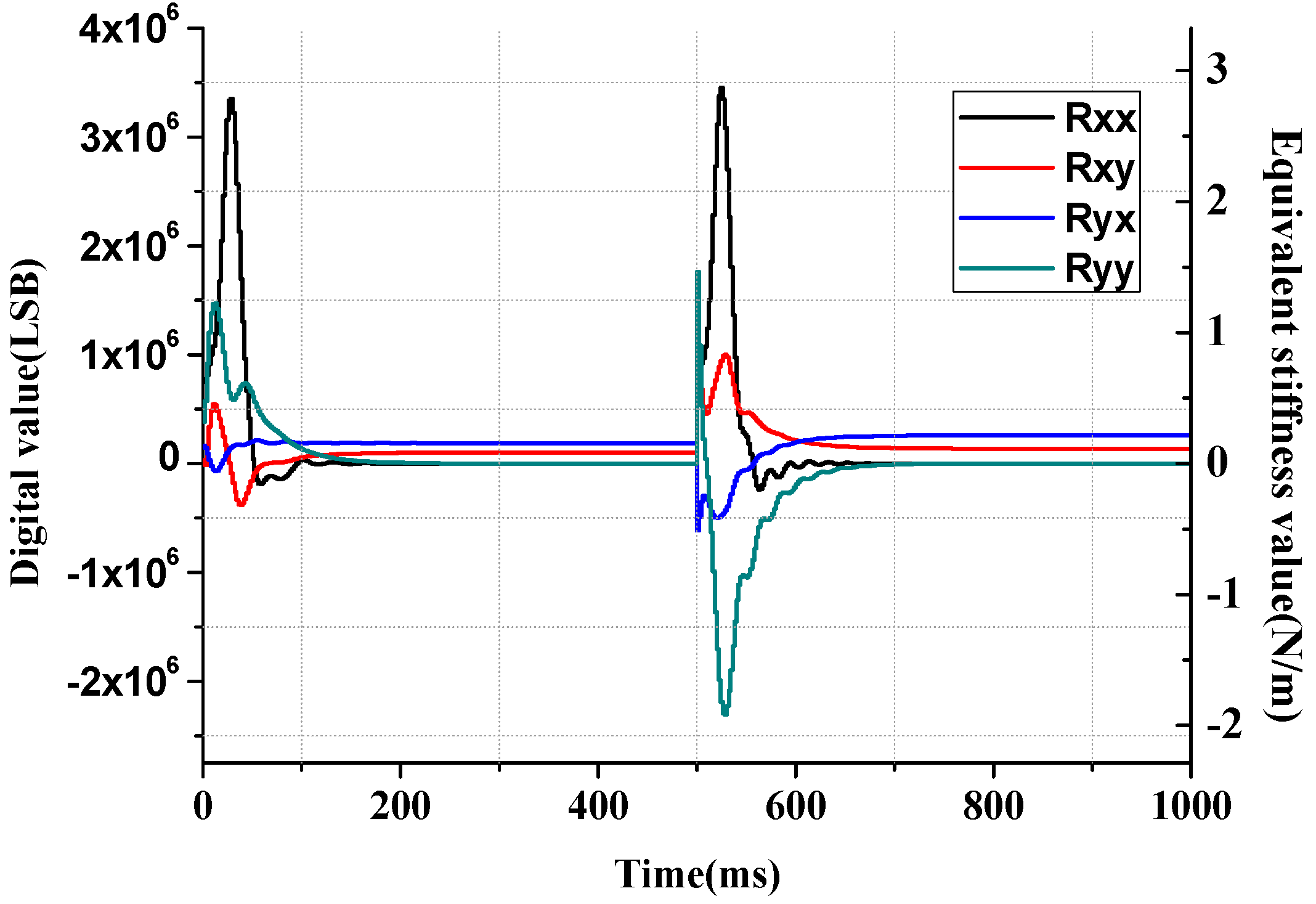
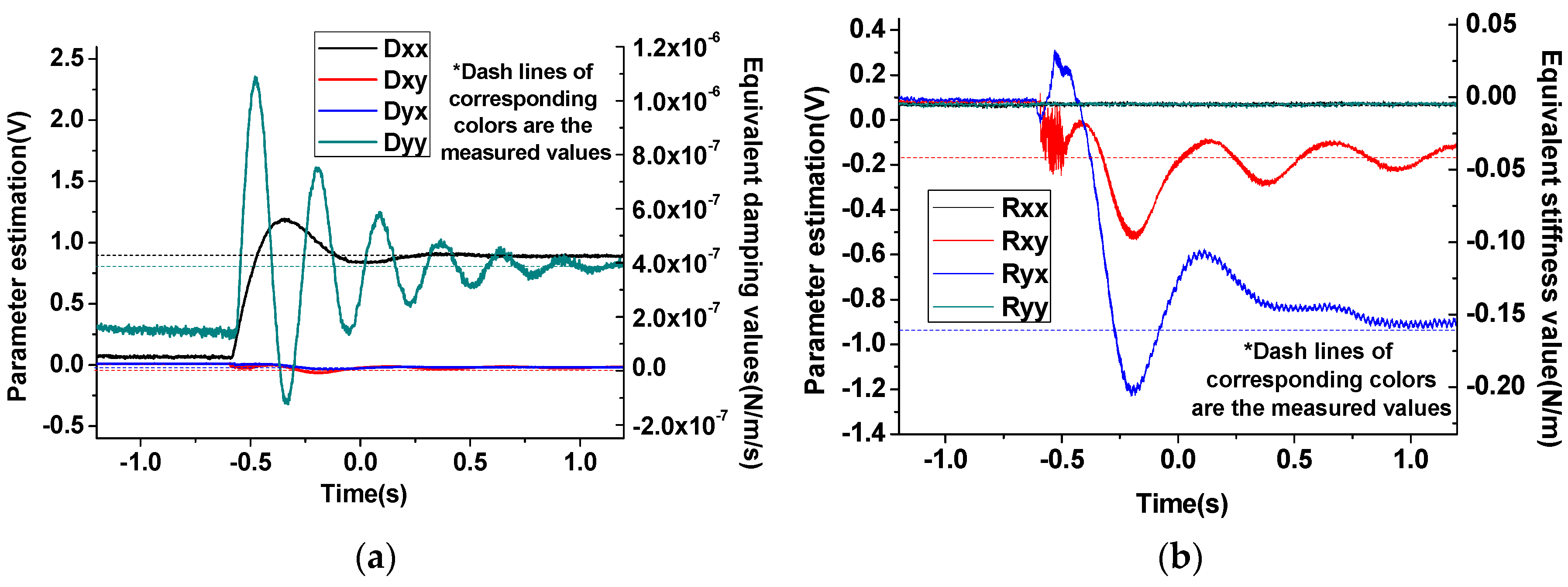
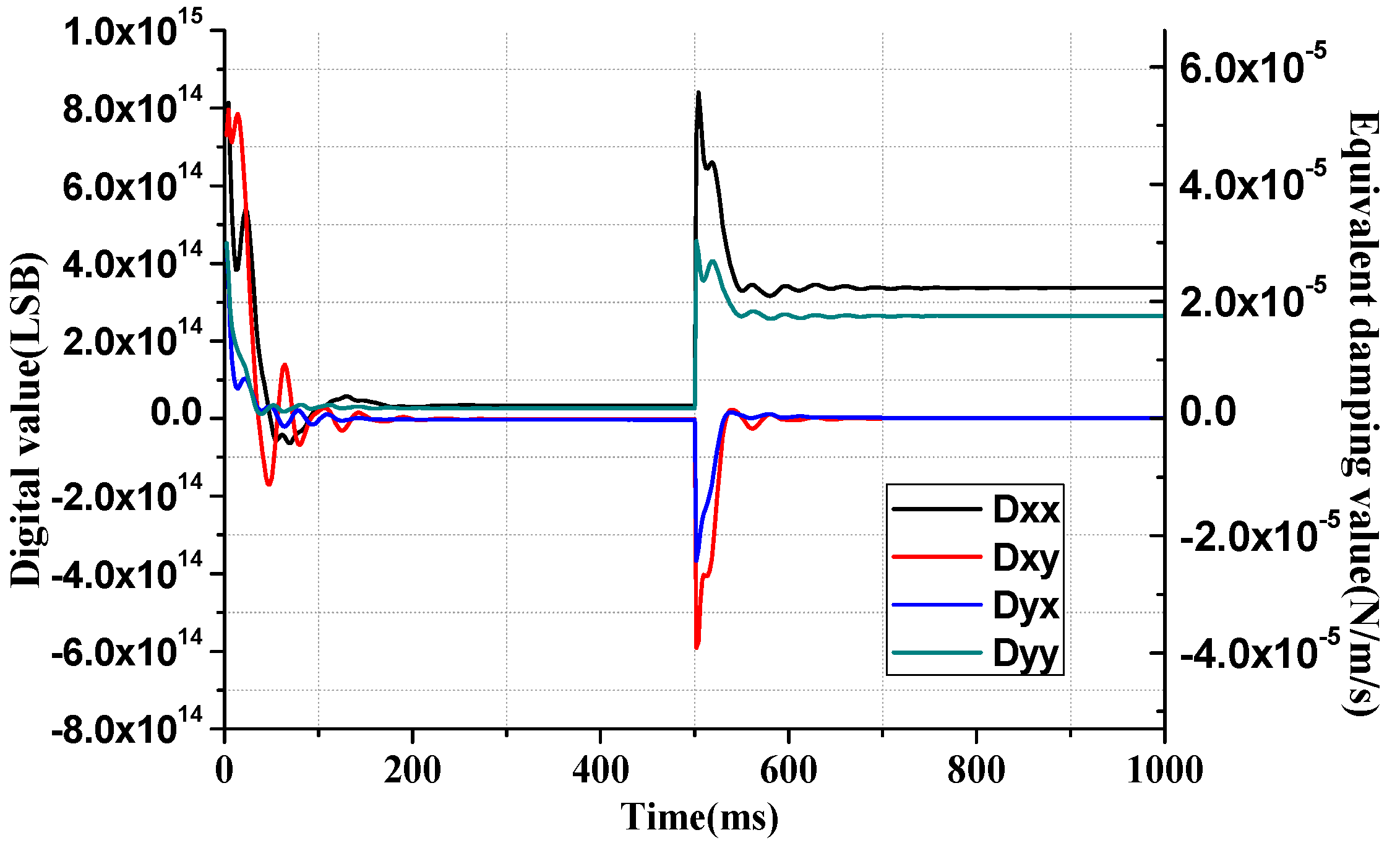
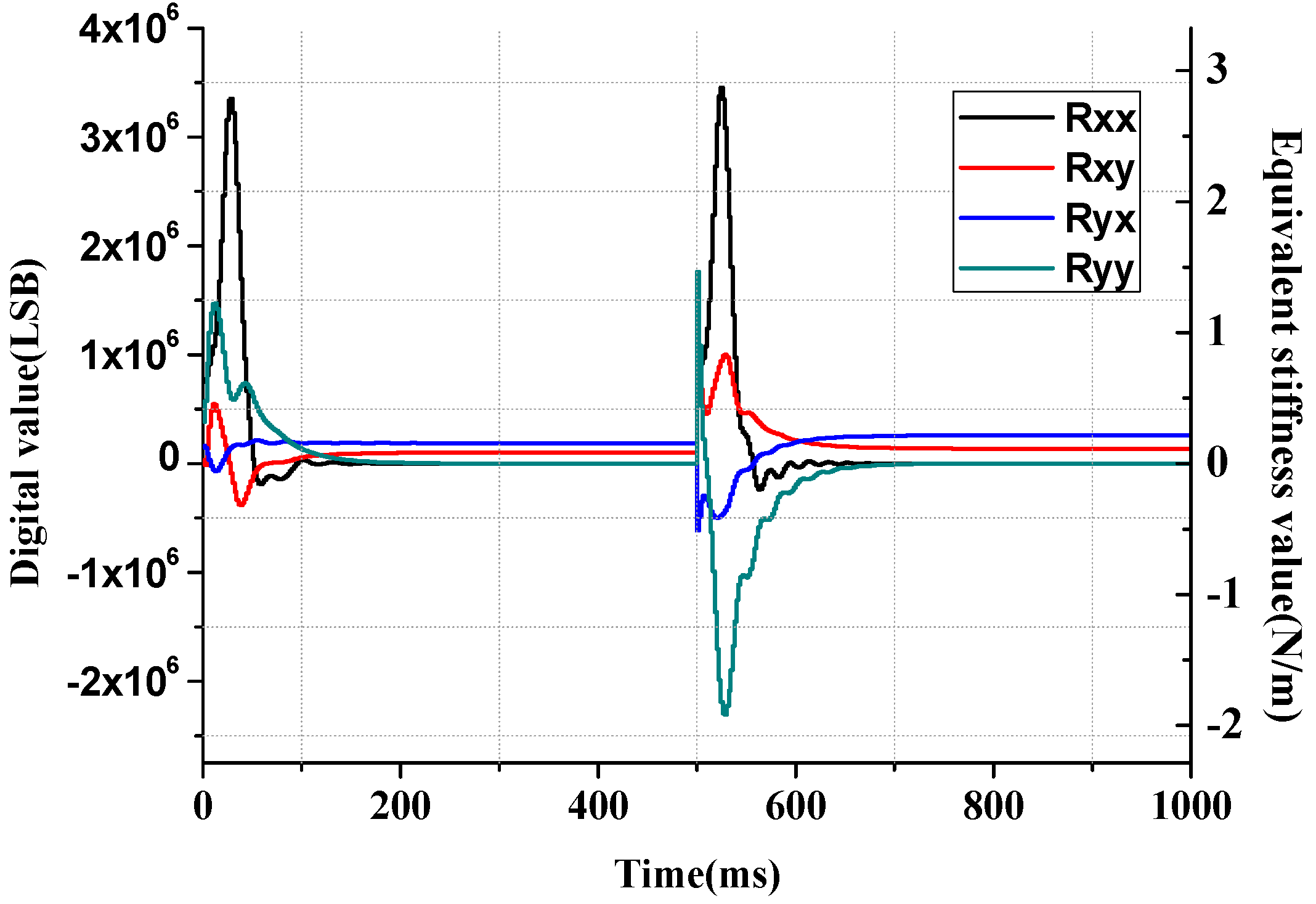
With the coefficients of the algorithms are determined, the performance against the parameters variation are also simulated. In practical circumstances, the stiffness of working gyroscope may change due to the environmental factors, especially the temperature. In practical condition, the parameters are changed gradually, but to test the estimation speed of the algorithm, the variations are simulated in the form of step switches, as shown in
Figure 12 and
Figure 13.
In
Figure 12, the quality factors of the gyroscope model vibration modes are changed to 1/10 of their original value, thus the damping coefficients are changed accordingly. In
Figure 13, the resonating frequencies of the drive mode and the sense mode are both changed by 10 Hz at 500 ms,
i.e., from 3715 Hz to 3725 Hz in drive mode and from 3684 Hz to 3674 Hz in sense mode.
From the simulation curves it can be seen that the algorithm can adapt to the parameter variations robustly and the estimated results converge to the real values after a short transition period.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}