
IEEE 802.15.4 ZigBee-Based Time-of-Arrival Estimation for Wireless Sensor Networks



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
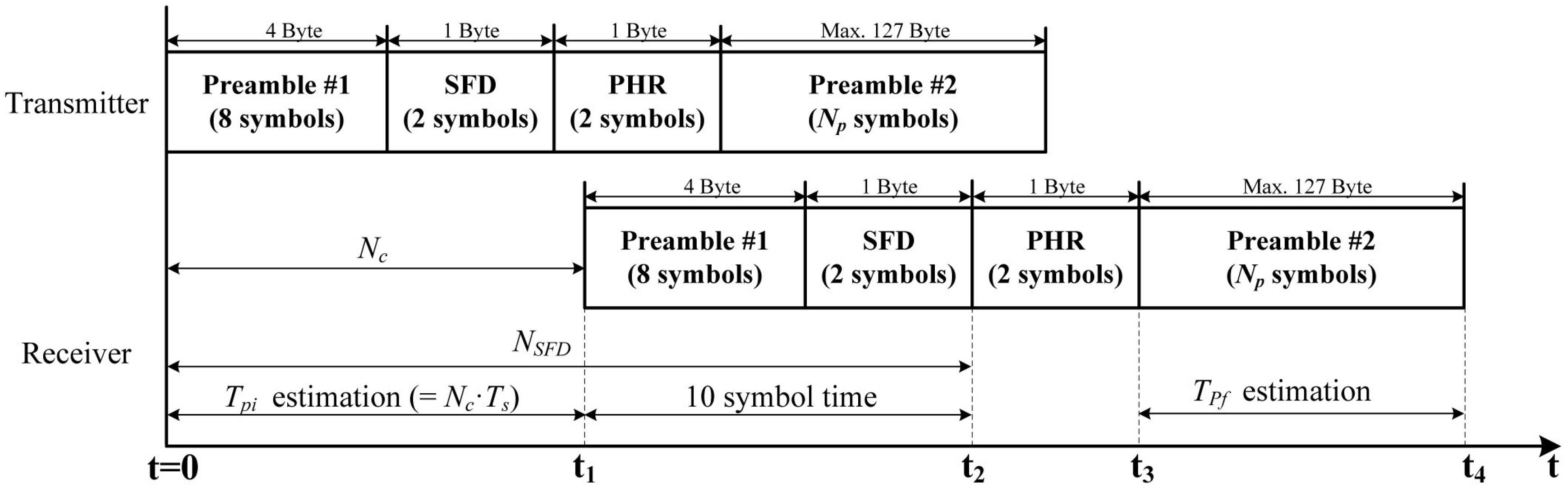
2. Packet Structure for TOA Estimation


3. Proposed ToA Estimation Algorithm
3.1. estimation
3.2. Estimation
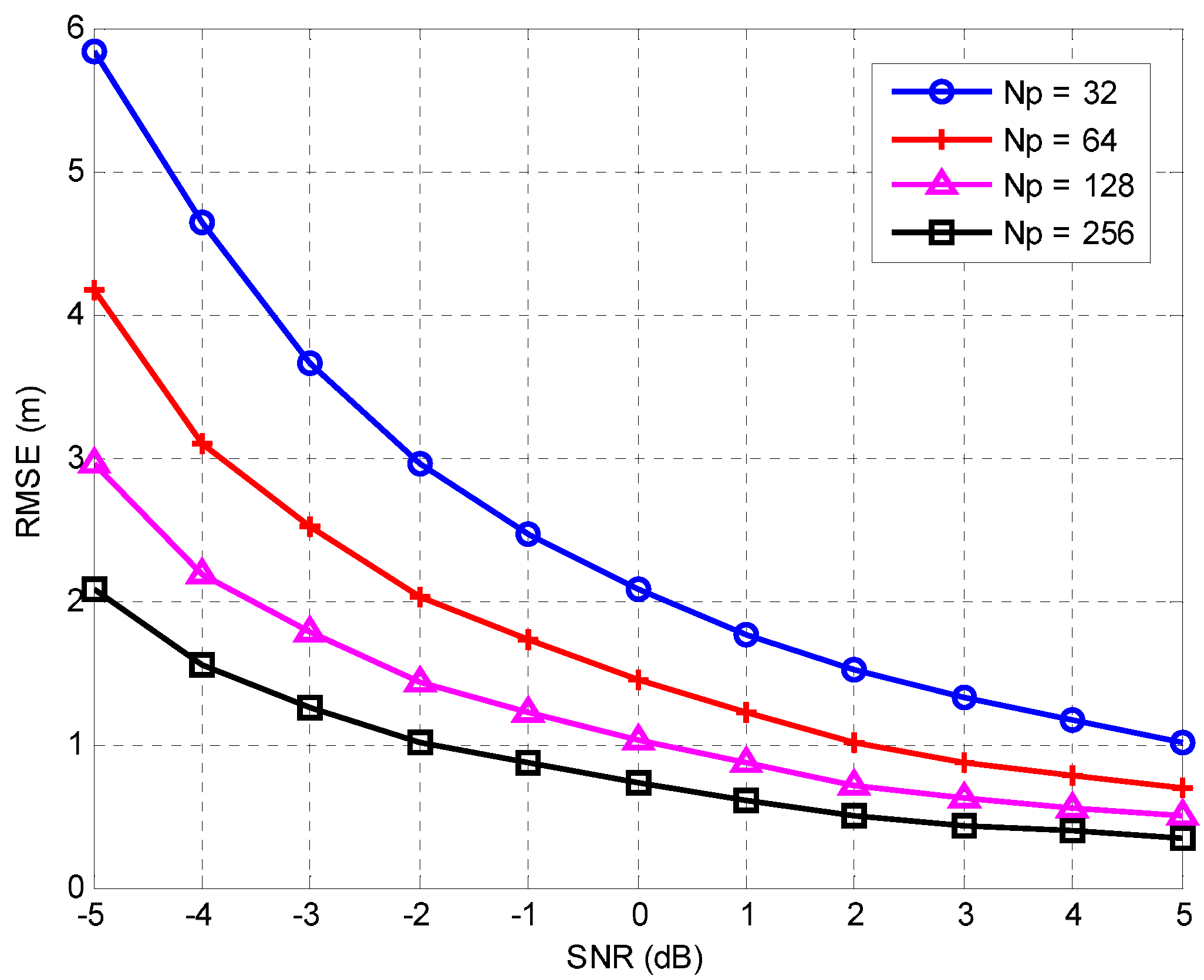
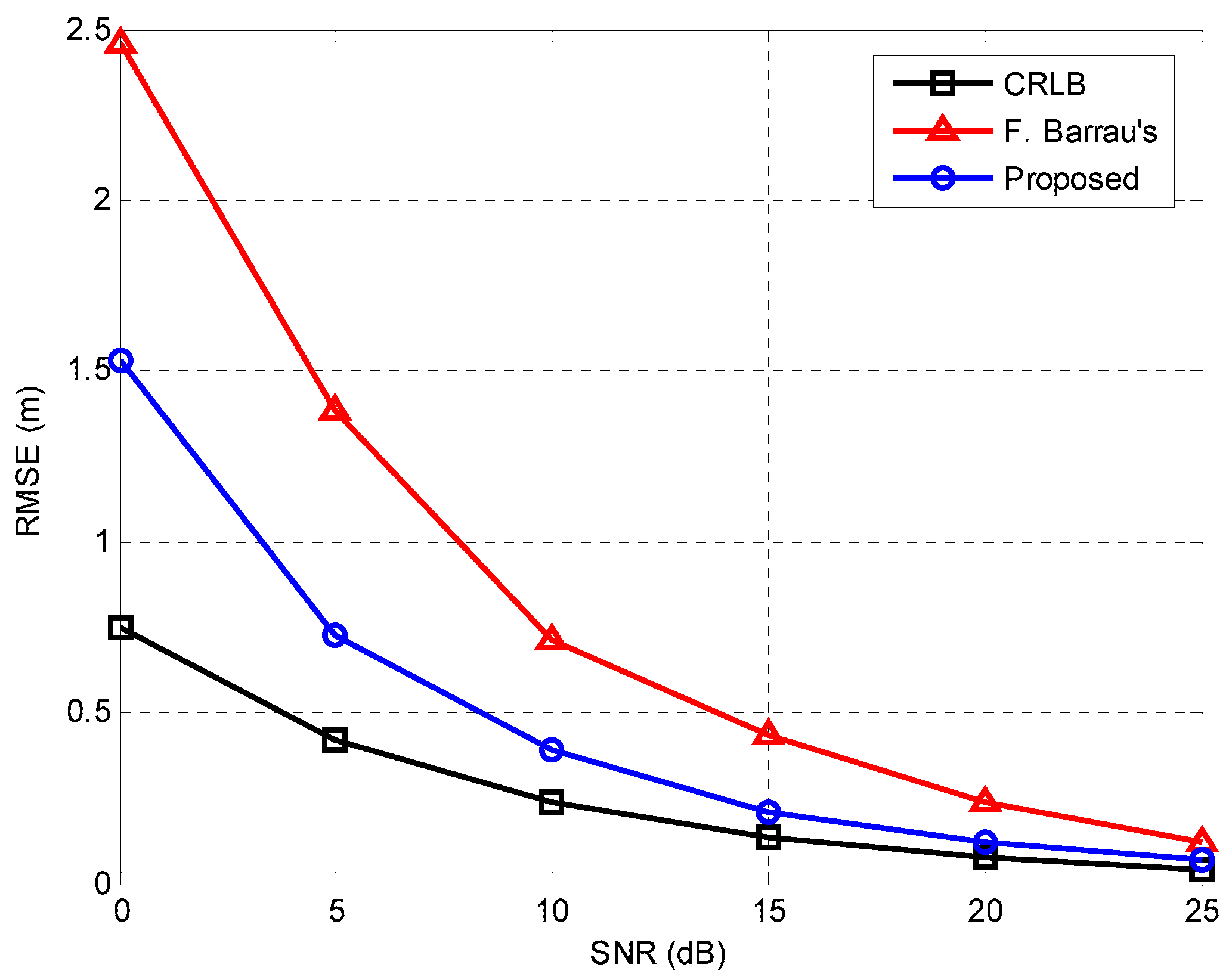
4. Simulation Results
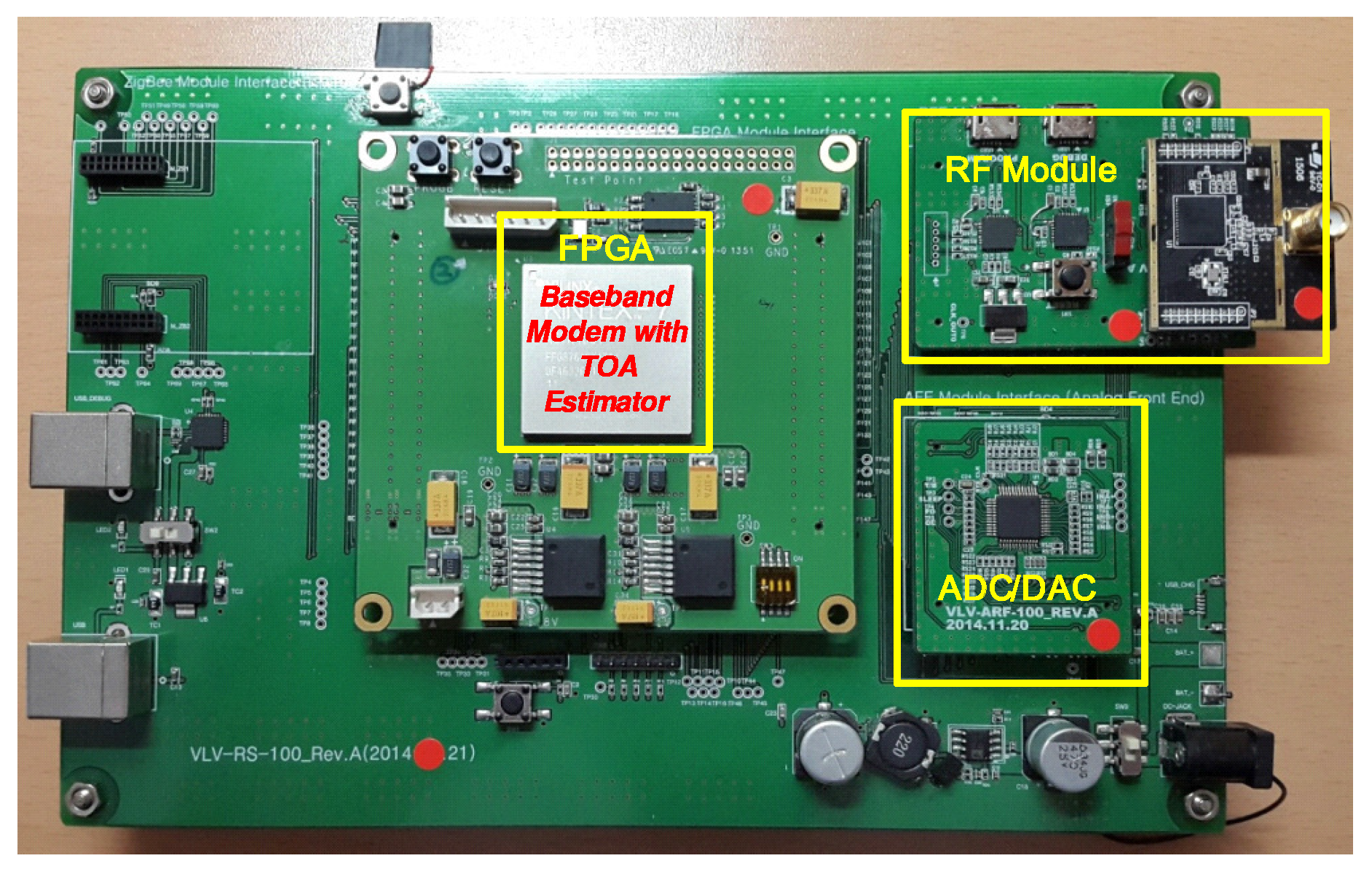
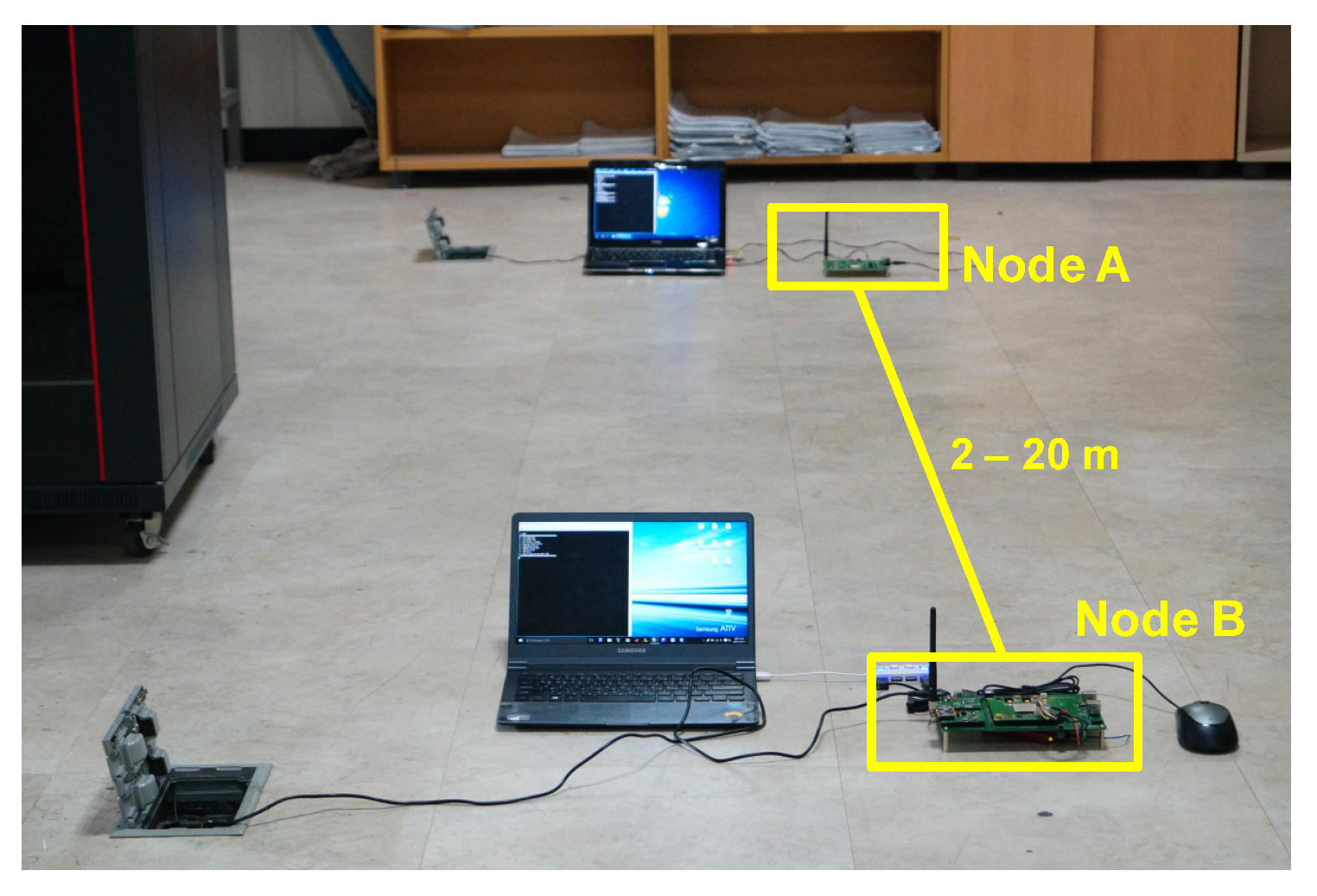
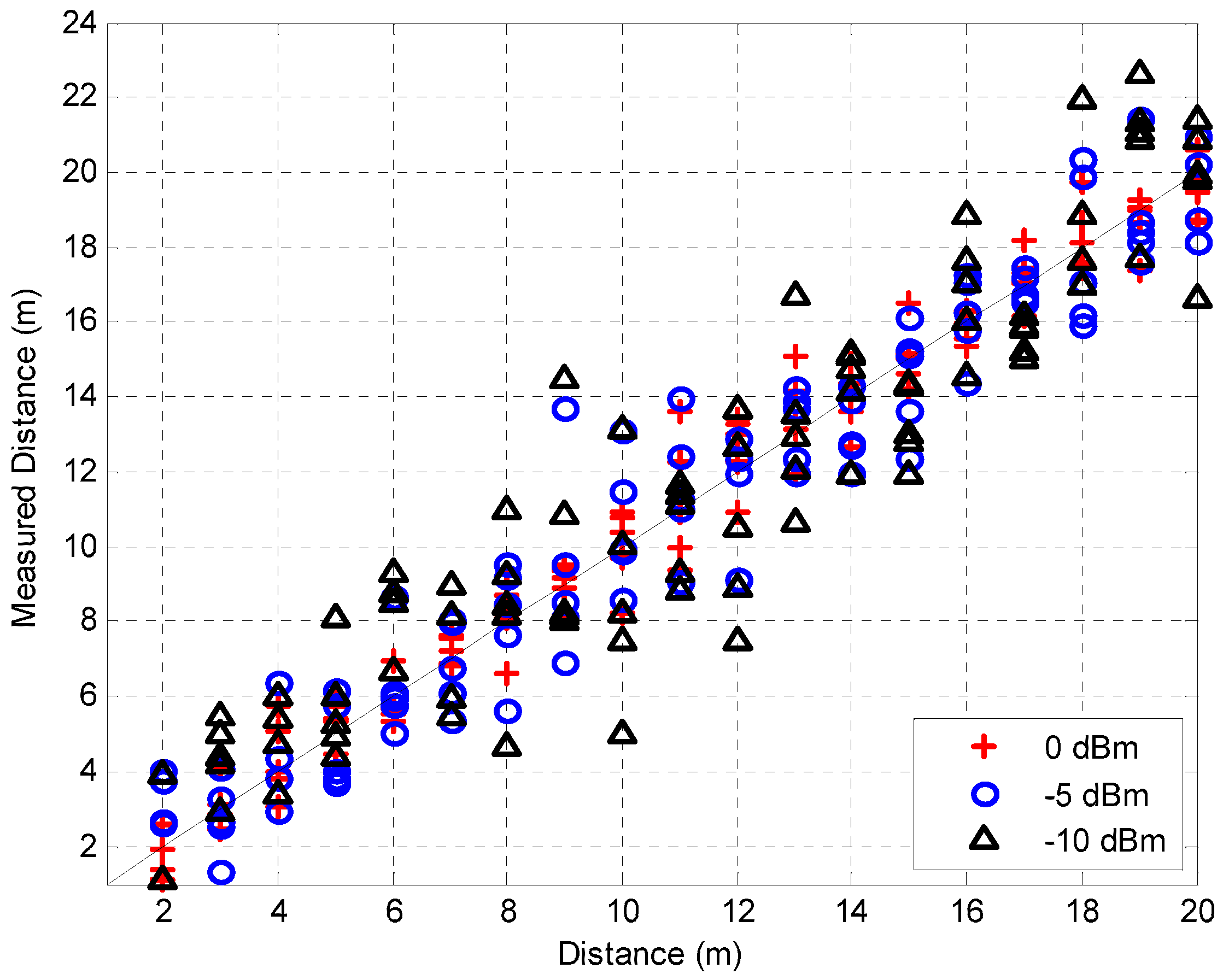
5. Experimental Results

6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Miao, C.; Dai, G.; Ying, K.; Chen, Q. Collaborative Localization and Location Verification in WSNs. Sensors 2015, 15, 10631–10649. [Google Scholar] [CrossRef] [PubMed]
- Tarrio, P.; Bernardos, A.; Casar, J. An Energy-Efficient Strategy for Accurate Distance Estimation in Wireless Sensor Networks. Sensors 2012, 12, 15438–15466. [Google Scholar] [CrossRef] [PubMed]
- Stojmenovic, I. Position-Based Routing in Ad Hoc Networks. IEEE Commun. Mag. 2002, 40, 128–134. [Google Scholar] [CrossRef]
- Patwari, N.; Ash, J.N.; Kyperountas, S.; Hero, A.O.; Moses, R.L.; Correal, N.S. Locating the Nodes: Cooperative Localization in Wireless Sensor Networks. IEEE Signal Process. Mag. 2011, 22, 54–69. [Google Scholar] [CrossRef]
- He, Z.; Ma, Y.; Tafazolli, R. Improved High Resolution TOA Estimation for OFDM-WLAN Based Indoor Ranging. IEEE Wireless Commun. Lett. 2013, 2, 163–166. [Google Scholar] [CrossRef]
- Lanzisera, S.; Lin, D.; Pister, K. RF Time of Flight Ranging for Wireless Sensor Network Localization. In Proceedings of the IEEE International Workshop on Intelligent Solutions in Embedded Systems, Vienna, Austria, 30 June 2006; pp. 1–12.
- Guvenc, I.; Sahinoglu, Z. Threshold-Based TOA Estimation for Impulse Radio UWB Systems. In Proceedings of the IEEE International Conference on Ultra-WideBand, Zurich, Switzerland, 5–8 September 2005; pp. 420–425.
- Alavi, B.; Pahlavan, K. Modeling of the TOA-Based Distance Measurement Error Using UWB Indoor Radio Measurements. IEEE Commun. Lett. 2006, 10, 275–277. [Google Scholar] [CrossRef]
- Kabir, H.; Kohno, R. A Hybrid TOA-Fingerprinting Based Localization of Mobile Nodes Using UWB Signaling for Non Line-Of-Sight Conditions. Sensors 2012, 12, 11187–11204. [Google Scholar] [CrossRef] [PubMed]
- Meghani, S.K.; Asif, M. Localization of WSN Node Based on RTT ToA Using Ultra Wide Band and 802.15.4a Channel. In Proceedings of the IEEE International Conference on Networking, Sensing and Control, Miami, FL, USA, 7–9 April 2014; pp. 380–385.
- Li, X.; Cao, F. Location Based TOA Algorithm for UWB Wireless Body Area Networks. In Proceedings of the IEEE International Conference on Dependable, Autonomic and Secure Computing, Dalian, China, 24–27 August 2014; pp. 507–511.
- Yin, Z.; Cui, K.; Wu, Z.; Yin, L. Entropy-Based TOA Estimation and SVM-Based Ranging Error Mitigation in UWB Ranging Systems. Sensors 2015, 15, 11701–11724. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.; Ye, Y.; Pahlavan, K. Comparison of UWB and NB RF Ranging Measurements in Homogenous Tissue for BAN Applications. In Proceedings of the IEEE Wireless Telecommunications Symposium, Phoenix, AZ, USA, 17–19 April 2013; pp. 1–5.
- Pourkhaatoun, M.; Zekavat, S.A. High-Resolution Low-Complexity Cognitive-Radio-Based Multiband Range Estimation: Concatenated Spectrum vs. Fusion-Based. IEEE Syst. J. 2014, 8, 83–92. [Google Scholar] [CrossRef]
- Schwarzer, S.; Vossiek, M.; Pichler, M.; Stelzer, A. Precise Distance Measurement with IEEE 802.15.4 (ZigBee) Devices. In Proceedings of the IEEE Radio and Wireless Symposium, Orlando, FL, USA, 22–24 Jane 2008; pp. 779–782.
- Witter, J.; Kirsch, F.; Vossiek, M. A Distance-bounding Concept for Bilateral IEEE 802.15.4 Communication. In Proceedings of the IEEE International Conference on Microwaves, Communications, Antennas and Electronics Systems, Tel Aviv, Israel, 9–11 November 2009; pp. 1–4.
- Lanzisera, S.; Zats, D.; Pister, K. Radio Frequency Time-of-Flight Distance Measurement for Low-Cost Wireless Sensor Localization. IEEE Sens. J. 2011, 3, 837–845. [Google Scholar] [CrossRef]
- Barrau, F.; Paille, B.; Kussener, E.; Goguenheim, D. Distance Measurement Using Narrowband ZigBee Devices. In Proceedings of the Wireless and Optical Communication Conference, Newark, NJ, USA, 9–10 May 2014; pp. 1–6.
- IEEE 802.15.4-2006 Standard. Wireless Medium Access Control (MAC) and Physical Layer (PHY) Specifications for Low-Rate Wireless Personal Area Networks (WPANs); IEEE Press: Piscataway, NJ, USA, 2006. [Google Scholar]
- McCrady, D.D.; Doyle, L.; Forstrom, H.; Dompsey, T.; Martorana, M. Mobile Ranging Using Low Accuracy Clocks. IEEE Trans. Microw. Theory Techn. 2000, 48, 951–958. [Google Scholar] [CrossRef]
- Baba, A.I. Calibrating Time of Flight in Two Way Ranging. In Proceedings of the IEEE International Conference on Mobile Ad-Hoc and Sensor Networks, Beijing, China, 12–14 December 2011; pp. 393–397.
- Ma, H.; Wu, H.; Wu, J.; Li, M.; Wang, K.; He, Z.; Zhao, D. Design and Implementation of Dual One-Way Precise Ranging and Time Synchronization System. In Proceedings of the European Frequency and Time Forum & International Frequency Control Symposium, Prague, Czech, 21–25 July 2013; pp. 831–834.
- Kim, W.; Jung, Y.; Lee, S.; Kim, J. Low Complexity Demodulation Scheme for IEEE 802.15.4 LR-WPAN Systems. IEICE Electron. Express 2008, 5, 490–496. [Google Scholar] [CrossRef]
- Park, D.; Park, S.; Lee, K. Simple Design of Detector in the Presence of Frequency Offset for IEEE 802.15.4 LR-WPANs. IEEE Circuits Syst. II Exp. Briefs 2009, 56, 330–334. [Google Scholar] [CrossRef]
- Ko, S.; Takayama, J.; Ohyama, S. A Novel RF Symmetric Double Sided Two Way Range Finder Based on Vernier Effect. In Proceedings of the IEEE International Conference on Control, Automation and Systems, Seoul, Korea, 14–17 October 2008; pp. 1802–1807.
- Kwak, M.; Chong, J. A New Double Two-Way Ranging Algorithm for Ranging System. In Proceedings of the IEEE International Conference on Network Infrastructure and Digital Content, Beijing, China, 24–26 September 2010; pp. 470–473.
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheon, J.; Hwang, H.; Kim, D.; Jung, Y. IEEE 802.15.4 ZigBee-Based Time-of-Arrival Estimation for Wireless Sensor Networks. Sensors 2016, 16, 203. https://doi.org/10.3390/s16020203
Cheon J, Hwang H, Kim D, Jung Y. IEEE 802.15.4 ZigBee-Based Time-of-Arrival Estimation for Wireless Sensor Networks. Sensors. 2016; 16(2):203. https://doi.org/10.3390/s16020203
Chicago/Turabian StyleCheon, Jeonghyeon, Hyunsu Hwang, Dongsun Kim, and Yunho Jung. 2016. "IEEE 802.15.4 ZigBee-Based Time-of-Arrival Estimation for Wireless Sensor Networks" Sensors 16, no. 2: 203. https://doi.org/10.3390/s16020203
APA StyleCheon, J., Hwang, H., Kim, D., & Jung, Y. (2016). IEEE 802.15.4 ZigBee-Based Time-of-Arrival Estimation for Wireless Sensor Networks. Sensors, 16(2), 203. https://doi.org/10.3390/s16020203