1. Introduction
As an important part of information fusion theory, target tracking has obtained more and more attention in wide applications. The main purpose of target tracking is to prevent false tracking or lost tracking, and ensure that the tracking is effective and accurate. Ship target tracking on the surface of the sea has been widely used in both military and civil fields. The performance of using radar to track surface ships are usually affected by sea clutter [
1]. Due to the sea clutter, filter algorithms, such as a Kalman filter, and a series of improved filter algorithms like EKF (extended Kalman filtering) and UKF (unscented Kalman filter), are used in target tracking systems [
2], and the data association is also adopted which can confirm the probability of measurement coming from the target. Previous studies have shown that the nearest-neighbor (NN) [
3] algorithm works reasonably well with targets in sparse scenarios, and the probabilistic data association (PDA) [
4] is suitable to track a single target in a cluttered environment, which, considering all of the measurements, falls into the validation gate. For the case of more than one target in the cluttered environment, an extension of probabilistic data association (PDA) was derived, called joint probabilistic data association (JPDA) [
5], where the association probabilities are computed from the joint likelihood functions corresponding to the joint hypotheses associating all of the returns to different permutations of the targets and clutter points. Another advanced algorithm, multiple hypothesis tracking (MHT) [
6], is categorized as a “deferred logic” method in which the decision about forming a new track or removing an existing track is delayed until enough measurements are collected. Recently, two popular algorithms have been derived within finite set statistics (FISST), namely, the probability hypothesis density (PHD) [
7] and the cardinalized PHD (CPHD) [
8] filters for multiple target tracking, which can avoid the problem of data association and can estimate both the target state and the target number directly.
Even though the JPDA has gained more and more attention in the field of target tracking, it tends to coalescence when two targets are in parallel or at a small-angle crossing. The exact nearest-neighbor probabilistic data association (ENNPDA) [
9] algorithm has shown that associated events pruning may be an effective way to prevent tracking coalescence, which was found to lead to track over-commitment and an increased incidence of track divergence in the presence of clutter and absent target detections. The dramatic pruning used for ENNPDA, however, leads to an undesired sensitivity to clutter and missed detections [
10]. Kennedy’s paper [
11] proposed a new scaled JPDA algorithm which introduced an arbitrary positive scaling factor. When the scale factor value is infinity, the algorithm is equivalent to the ENNPDA algorithm, and when the scale factor value is one, the algorithm is equivalent to the JPDA algorithm. Thus, when the scale factor value is an appropriate intermediate value, the algorithm can not only avoid track coalescence, but can also prevent track divergence in the presence of clutter and absent target detections. How to choose a suitable scaling factor in the real tracking problem has always been the focus in multi-target tracking, and the suitable scaling factor is usually determined from the experience. To improve this, Blom has proposed a developed JPDA* [
12], a coalescence-resistant version of JPDA, which performs as well as the Set JPDA [
13]. Recently, a coalescence-avoiding version of JIPDA [
14], called JIPDA* [
15], was proposed to solve tracking coalescence. In this paper, we propose an improved version of the PDA algorithm which uses distance weighting to optimize the association probability. Then the tracking performance can do well when two targets are in parallel or at a small-angle crossing under a densely cluttered environment.
When dealing with the problem of maneuvering target tracking in the densely cluttered environment, due to the uncertainty of the target motion, the multiple model algorithm assumes that there are many possible target movement models, different movement patterns with different motion models, realizing the mutual switch between different modes. Then the maneuvering target state estimation problem is converted into a target motion pattern recognition problem. In order to achieve multiple-target motion multiple-model tracking, the interactive multiple-model (IMM) algorithm, originally developed by Blom and Bar-Shalom [
16], and then the improved IMM algorithm, like AIMM [
17] and VSMM [
18], etc., are put forward. The application of IMM is relatively simple, and can handle complex movement patterns, which is one of the most popular algorithms used in maneuvering target tracking. The combination of PDA and IMM (IMM-PDA) [
19] used in single-maneuvering target tracking was put forward. Based on IMM-PDA algorithm, the authors in [
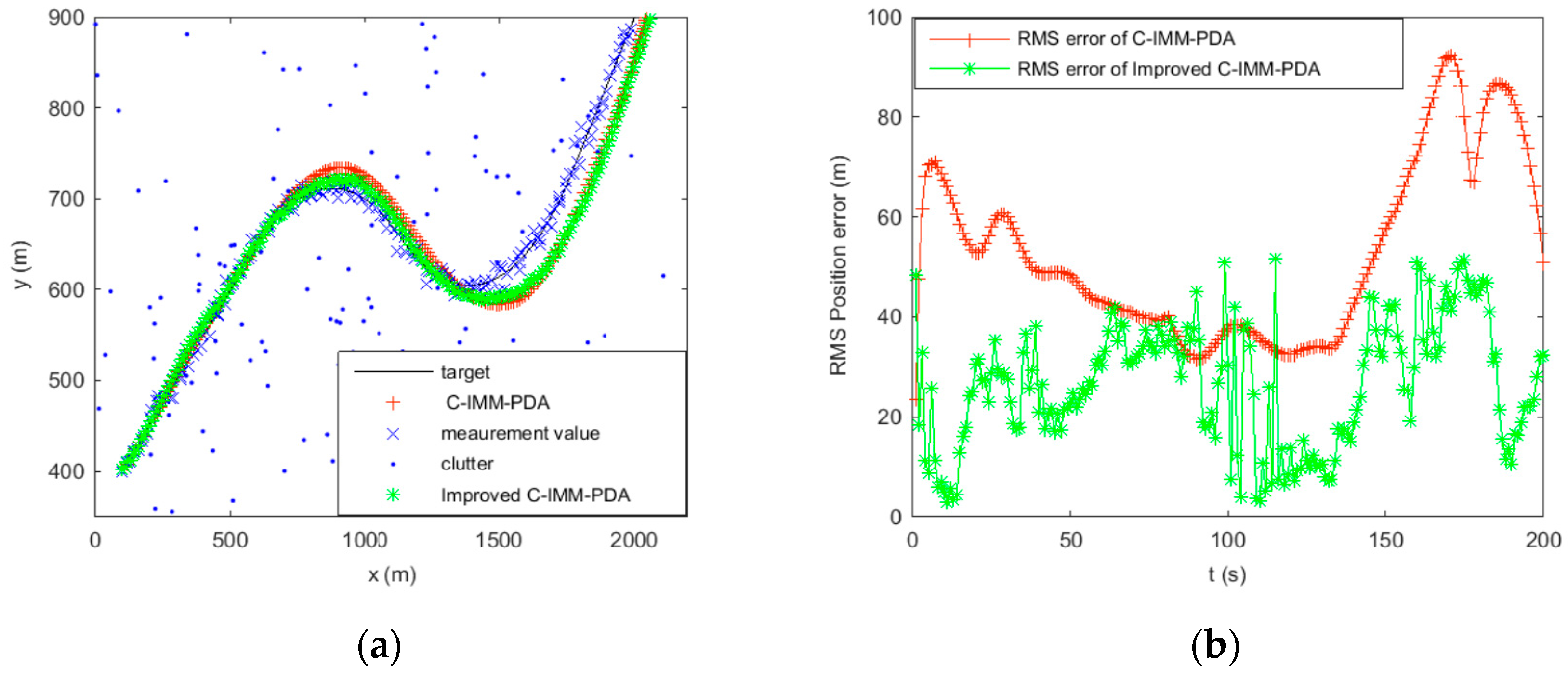
20] proposed a combined interactive multiple-model probabilistic data association (C-IMM-PDA) algorithm. Based on the frame of C-IMM-PDA, using the improved PDA filter, the performance of tracking maneuvering targets has improved.
In this paper, a novel probabilistic data association algorithm is proposed based on the distance weighting method. This algorithm not only improves the performance of single-target tracking in densely cluttered environments, but can also avoid coalescence when the targets are in parallel or in small-angle crossing scenarios. Based on the frame of C-IMM-PDA, and using the improved PDA filter, the algorithm also does well when tracking maneuvering targets in densely cluttered environments. The target tracking system is described in
Section 2. In
Section 3, on the basis of research of PDA, an improved probabilistic data association based on distance weighting is proposed to enhance the tracking accuracy and stability in densely cluttered environments, and also for maneuvering target tracking. Then, an improved C-IMM-PDA is presented. Simulation results showing how the performance compares to the existing algorithm are shown in
Section 4. Finally, some conclusions are provided in
Section 5.
2. Target Tracking Dynamic System in a Cluttered Environment
In a target tracking dynamic system, the major purpose is to estimate the parameters of the target that evolve sequentially with time. As measurement data become available, the unknown parameters forming a state vector are estimated sequentially using measurement data. Tracking in time with the problem of parameter estimation can be readily formalized in the following framework. In most surface ship tracking applications, the noise terms are additive, so the expression of the state equation and the measurement equation are defined as follows:
The state equation (Equation (1)) describes the evolution or transition of with and assumes that the state follows a first-order Markov process. Function is a known function related with the state vector at time to the time . Function is a known noise matrix. is the process noise and its covariance is .
The measurement Equation (2) relates function to state vector through a known function , is the measurement noise, and its covariance is . The process noise and measurement noise are independent, zero mean noise, with known covariance, respectively. In the sea clutter environment, at time , the measurements can come from the target or the clutter, The measurements at time are . is the measurement number at time . The cumulative set of measurements until time is .
3. A Novel Probabilistic Data Association
3.1. Probabilistic Data Association (PDA) Algorithm
As for PDA, there are two assumptions: (1) a measurement can only have one source; (2) no more than one measurement can originate from a target. Suppose the set of validated measurements at time
is
,
is the validated measurements at time
. The cumulative set of measurements until time
is
. The validation region is centered on the predicted measurement of the target, which is set up to accept the measurement at a certain probability. The validation region is defined as follows:
Here, we use a Kalman filter to estimate the state of the target. The prediciton of the state and the measurement at time are defined, respectively, as and . is the covariance matrix of innovation, is the covaiance of the prediction state. is the threshold which can be get from the chi-square distribution.
Denote association events as
. The probability of either the measurements originating from the target or clutter (false alarm) is expressed as the likelihood (Equation (4)) condition that all of the measurements lie in the validation region:
As we know, the definition of events are mutually exclusive and limited:
. Here we use a Kalman filter to estimate the target state. The expression is shown as follows:
If there is no measurement that falls into the validation region, namely , we use the state prediction to approximate the updated values of the target state. . is the innovation, is the combined innovation, and the Kalman gain is .
The error covariance associated with the updated state estimation can be expressed as follows:
3.2. A New Association Probability of PDA
The association probability is the likelihood of
on the condition that all of the measurement lie in the validation region as explained by Equation (3). Using the parametric PDA [
4], the association probability is as follows:
where
;
,
is the probability of detection, and
is the probability that the target measurement falls into the validation region.
is an important parameter which directly influences the estimation of the target state. The PDA algorithm considers all of the measurements falling into the validation region, and there is no clear and effective relationship between the validation measurement and the prediction measurement. Since the clutter is distributed randomly in position, number, and density in the tracking space, the measurement originating from the target is more likely near the predicted measurement. Thus, this important prior information is introduced as a distance weight to optimize the association probability. The weight calculation method in the literature [
21] has certain limitations, namely, when the number of validation measurements is just one, the value will be infinite, which can lead to filter failure. Here we propose a new expression of distance weight:
where
is the Mahalanobis distance between measurement
and the prediction measurement at time
, the expression is
.
is the validated measurement at time
,
is the prediction measurement, and the expression is
.
is the covariance matrix of innovation in the Kalman filter, and its expression is
.
The association probability expression with the distance weighting is show below:
The normalized association probability expression is show as Equation (10):
Here, with the new association probability, we use a Kalman filter to estimate the target state. The calculation is shown in Equations (5) and (6).
3.3. Improved C-IMM-PDA Algorithm
The traditional algorithm is just a combination of the interactive multiple model and the probabilistic data association together. On the one hand, each model uses an independent validation region to obtain the validated measurement. However, for the entire system, the validation region may not be optimal, which can increase the target estimation error, and finally lead to a lost target or tracking the wrong target. On the other hand, with the increase in the number of targets and the number of target motion modes, the computational cost will also increase. Thus, the literature [
20] proposes a new IMM-PDA structure (combined interactive multiple-model probabilistic data association algorithm, C-IMM-PDA), which uses the same validation region to obtain the validated measurement, and also uses comprehensive measurement to update and estimate the target state. This method can better realize target tracking and save on the computational cost. Here, based on C-IMM-PDA, we use the improved PDA filter to obtain the association probability which can enhance the accuracy of the estimation target state. The improved C-IMM-PDA algorithm implementation stated is as follows.
1. Interaction Mixed with the Estimate from the Previous Time
Starting with
, its covariance,
and the model probability
, the mixed initial condition for the filter matched to model
can be expressed as follows:
where
is the mixed probability,
,
denotes the normalizing factor, and
.
is the switch probability from model
to model
.
2. Submodel Filter and Prediction
With the mixed initial state
and its covariance
, here we use a Kalman filter to estimate the target state, the predicted state
, and its corresponding covariance
, the predicted measurement
, and the covariance matrix of innovation
for each motion model
can be expressed as follows:
Here, we use the comprehensive prediction of the measurement and the comprehensive prediction covariance matrix tectonic tracking region. Its definitions are as follows:
Here, using definitions from Equations (13) and (14), the parameters of the comprehensive validation region can be given as:
Set . Assuming obeys the normal distribution so that obeys the chi-square distribution with the degree of freedom , we use the method of hypothesis testing to determine whether falls into the validation region.
Suppose
is the number of validated measurements at time
. Each filter using comprehensive measurement as the prediction measurement to update the state, the update equations are the same as the normal Kalman filter. Comprehensive measurement can be expressed as follows:
where
can be obtained from Equation (10).
Using Equation (16) to update each filter will lead to the estimation covariance being large; here we use Equation (17) to correct its covariance:
3. Model Probability Update
The model probability is updated by
as in Equation (18):
Here, considering model probabilities update as an independent part of IMM, where .
4. Interaction Ouput Estimation Results
Finally, the model-conditioned estimates are calculate using Equation (19).
5. Conclusions
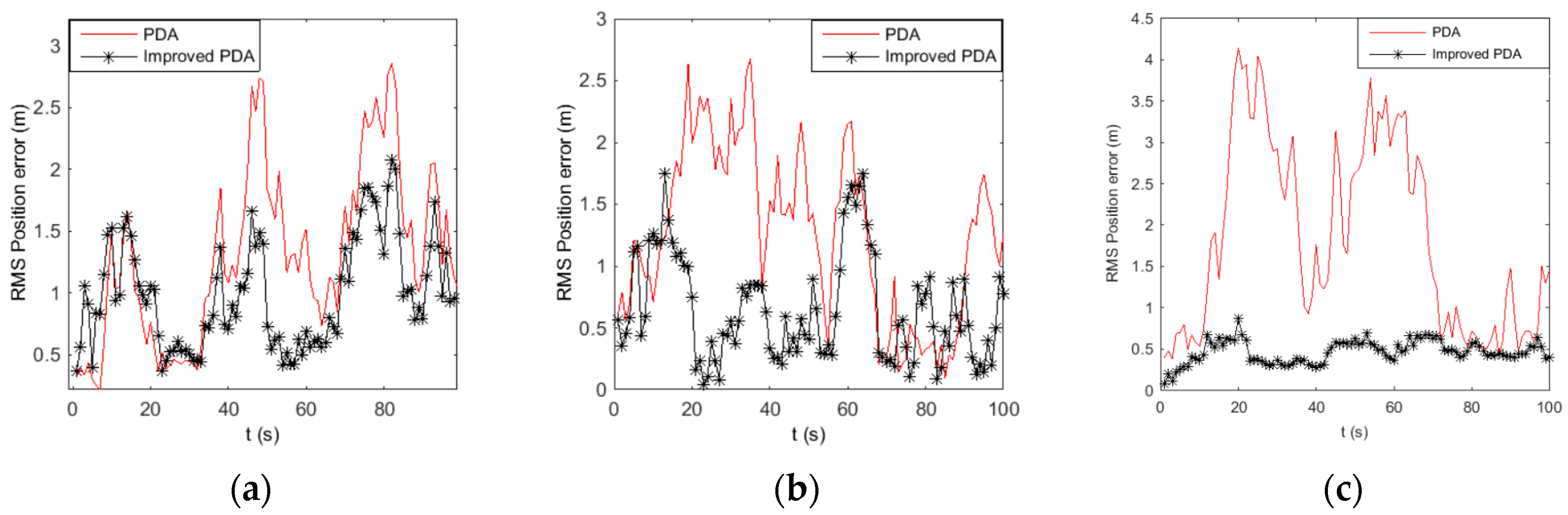
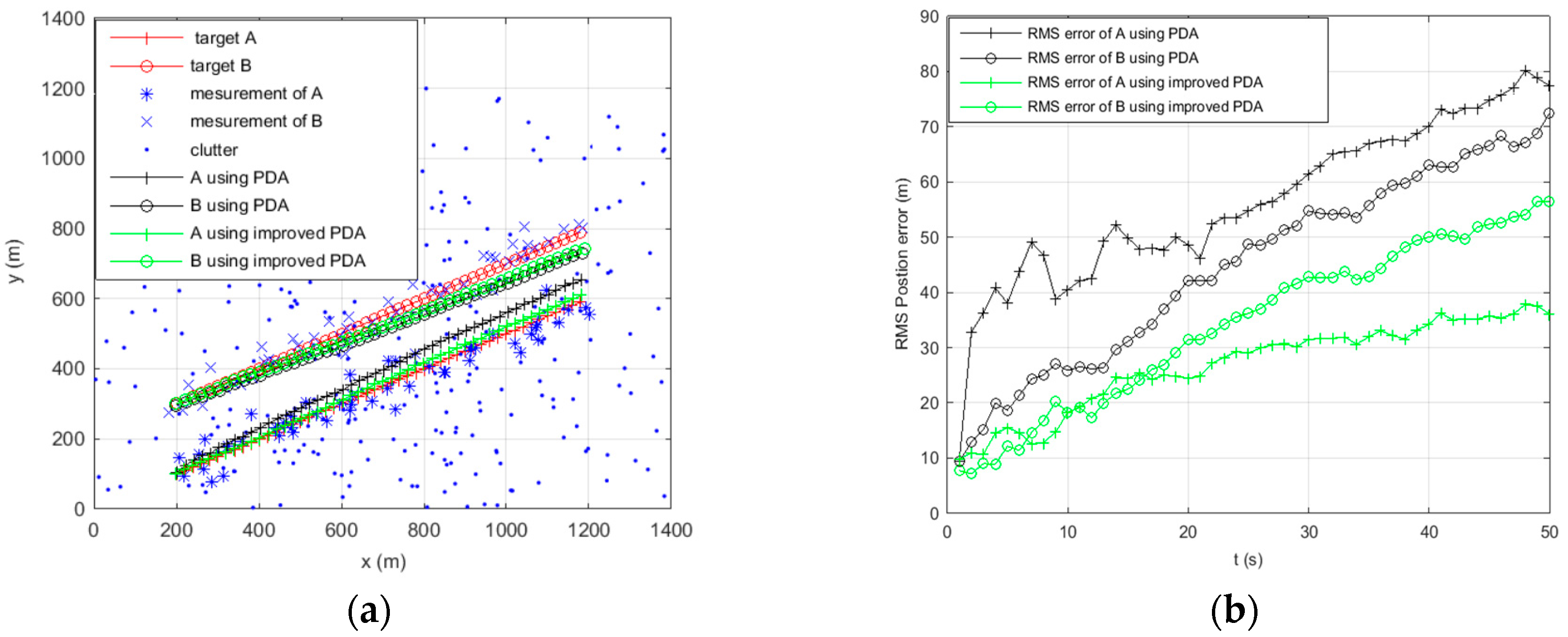
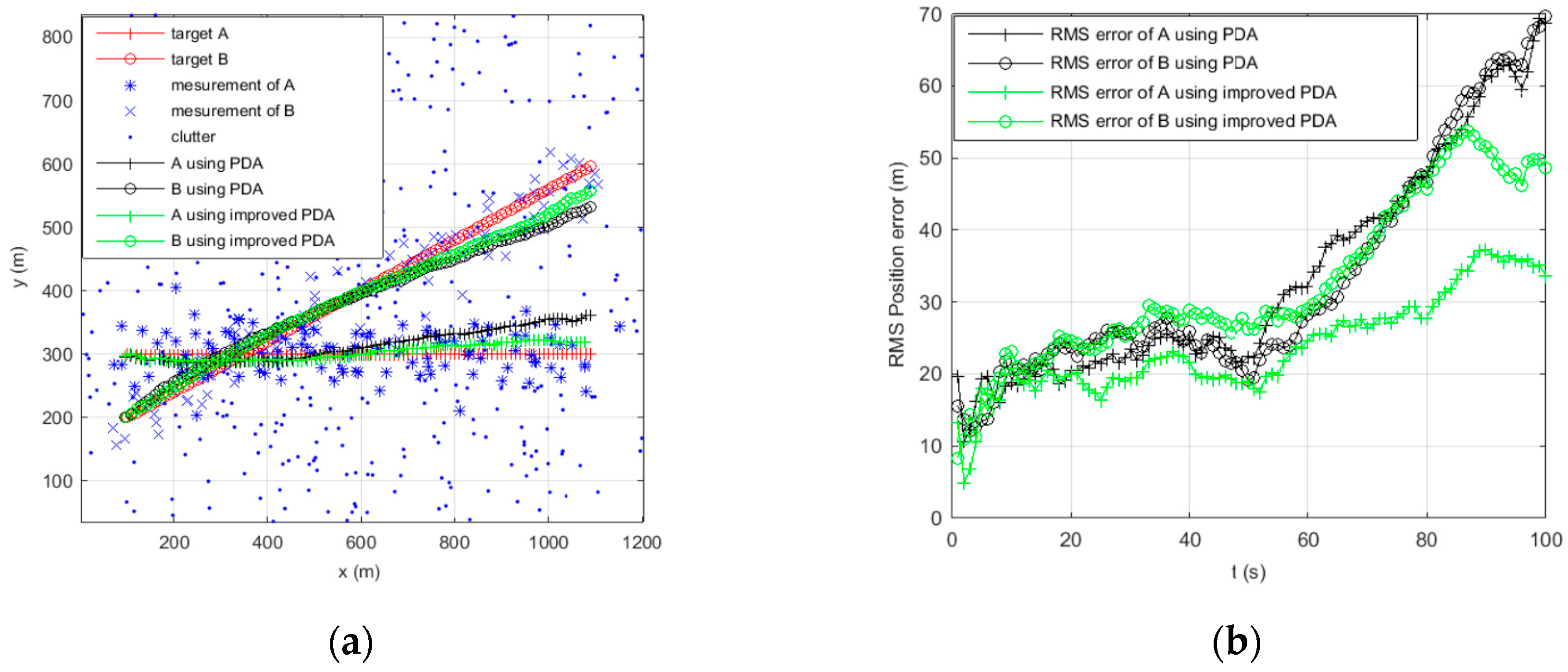
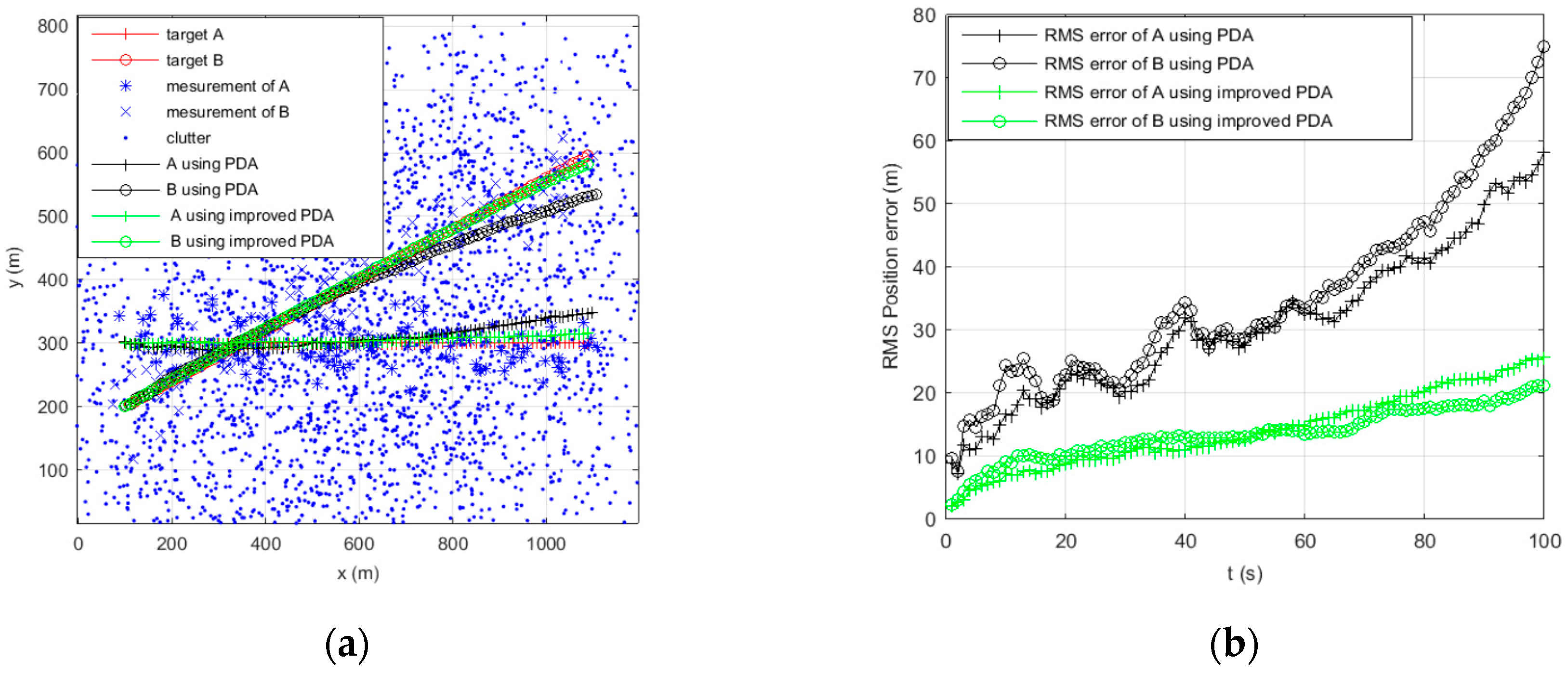
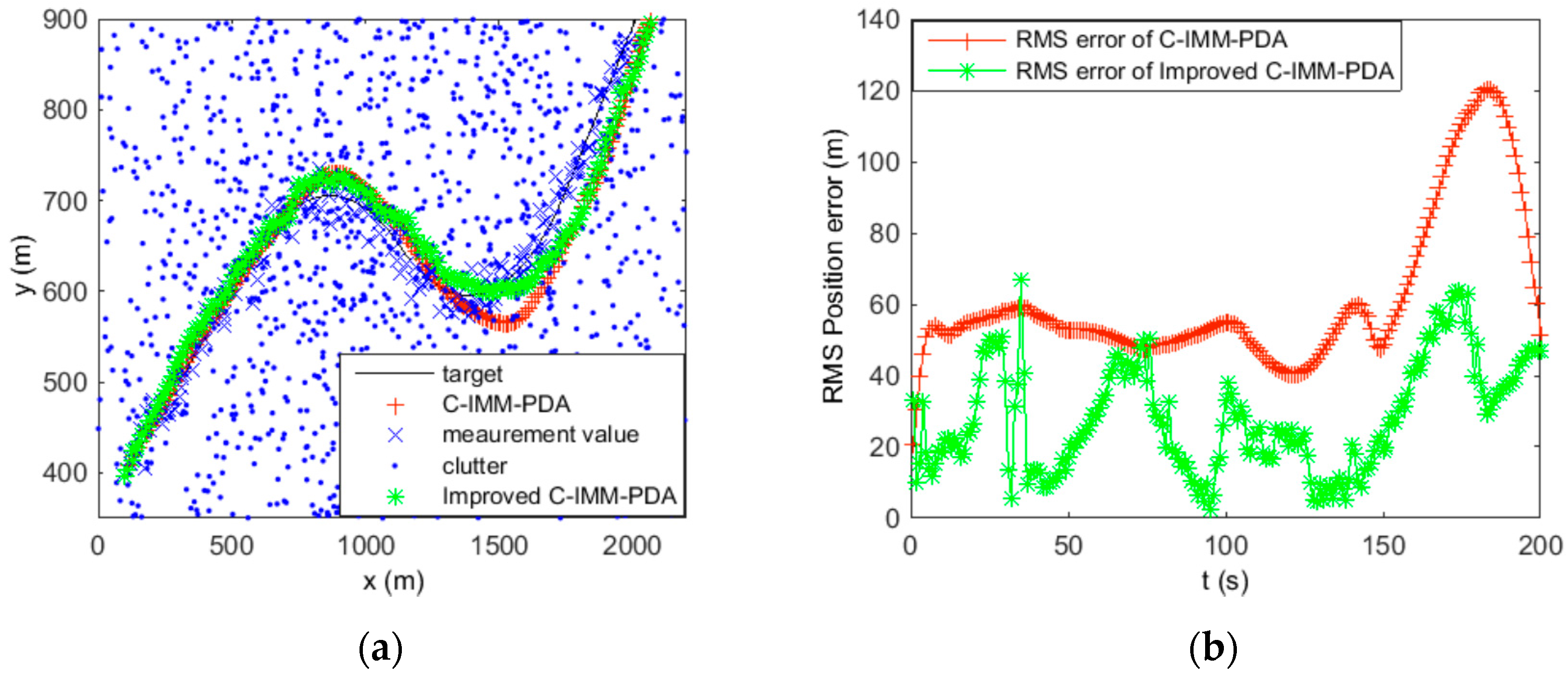
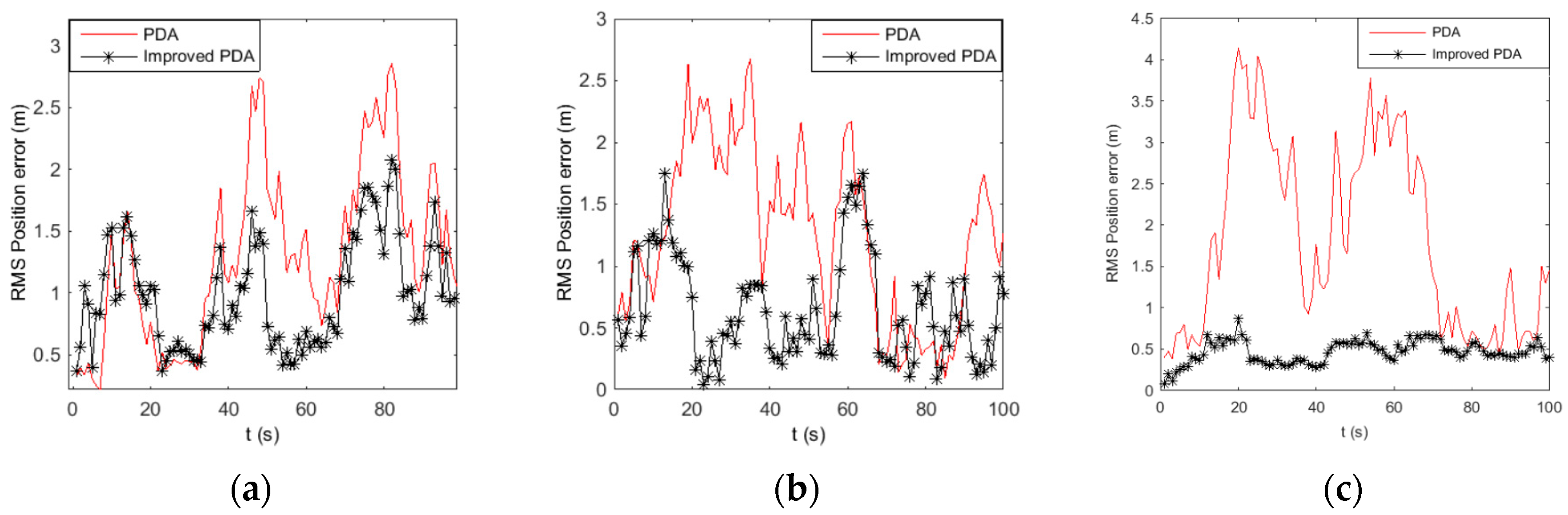
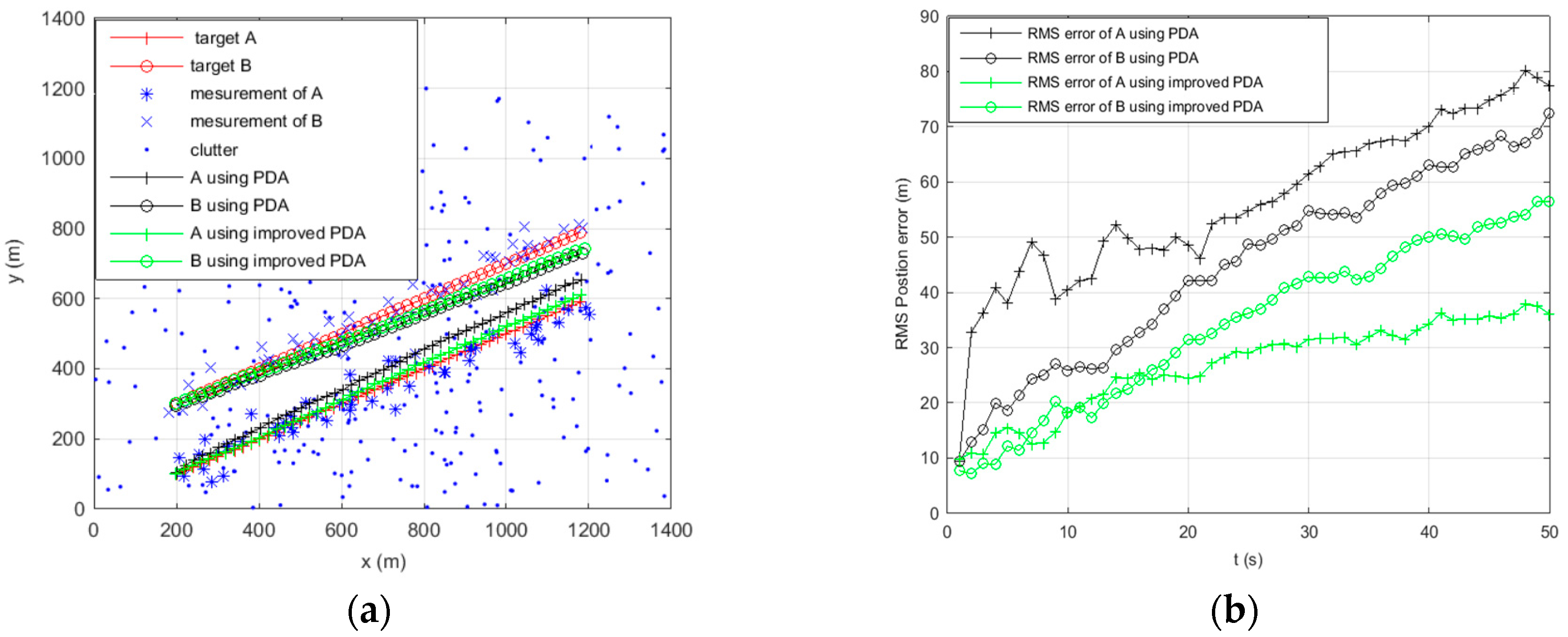
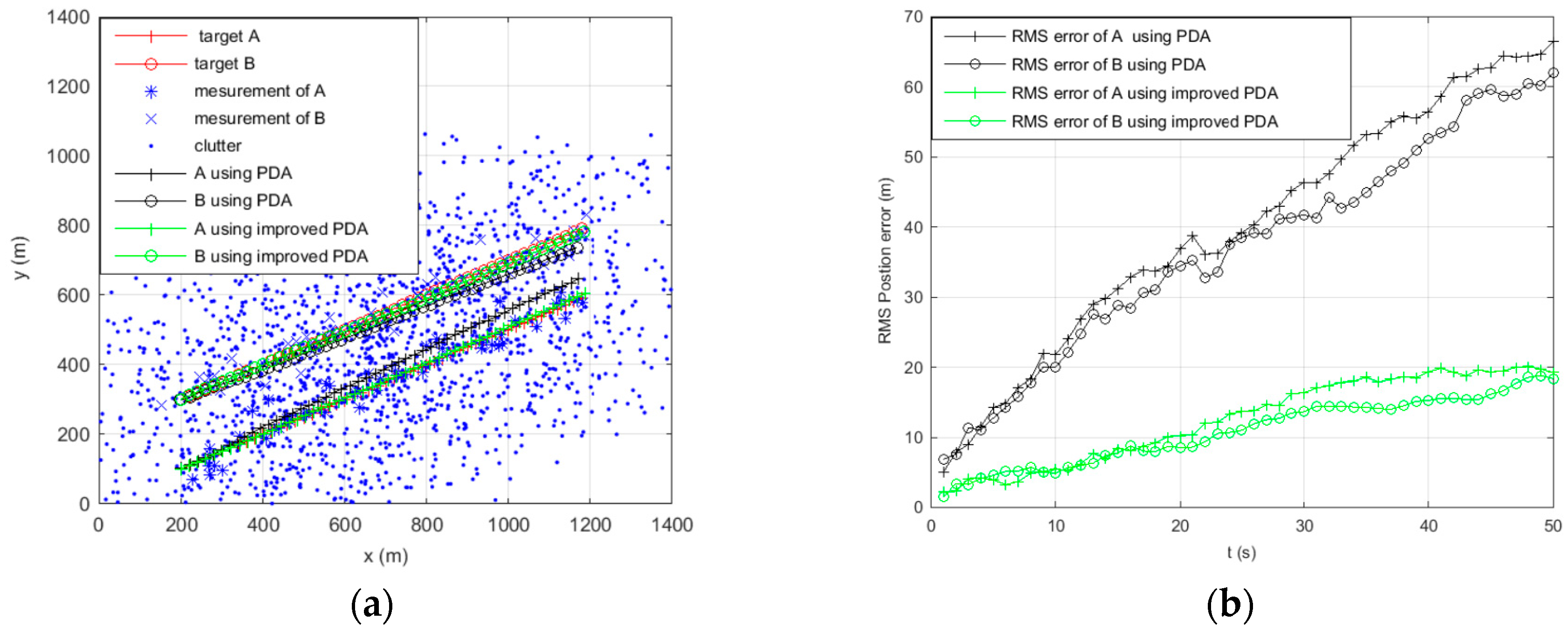
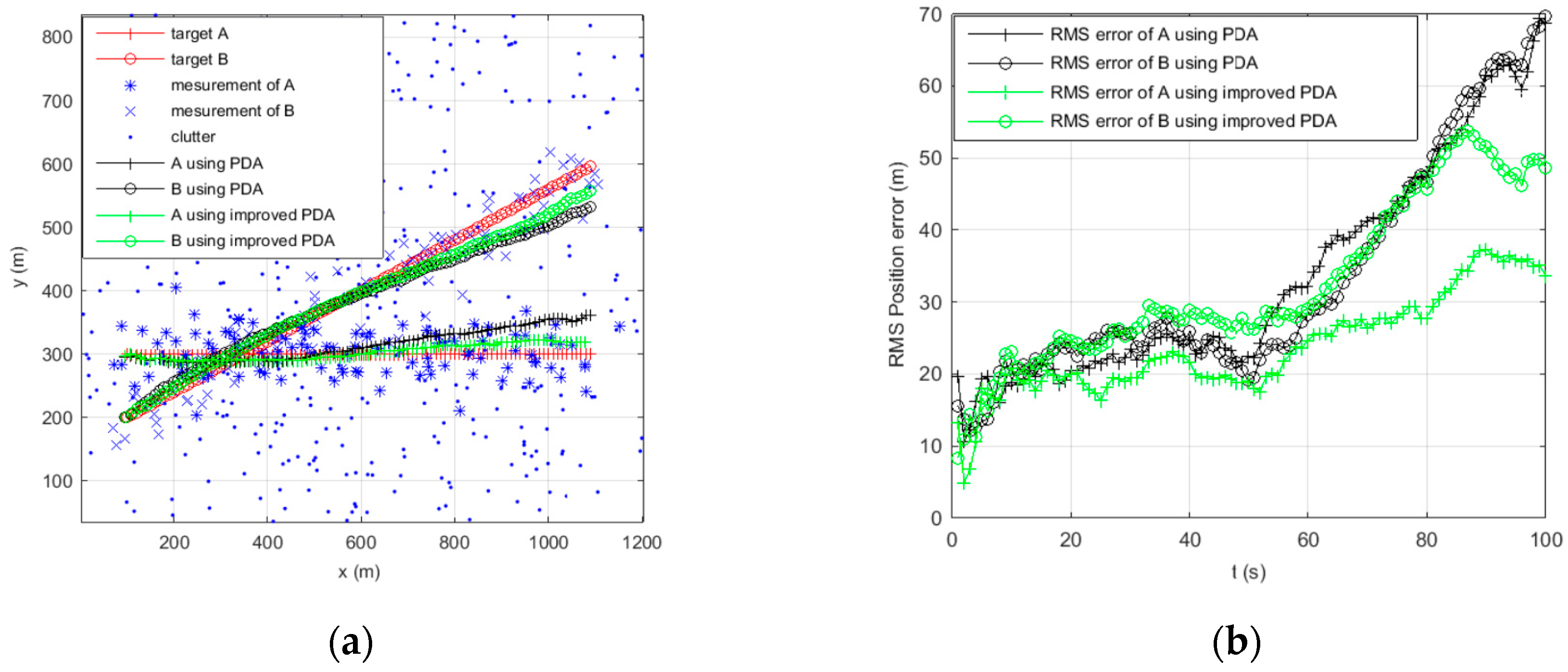
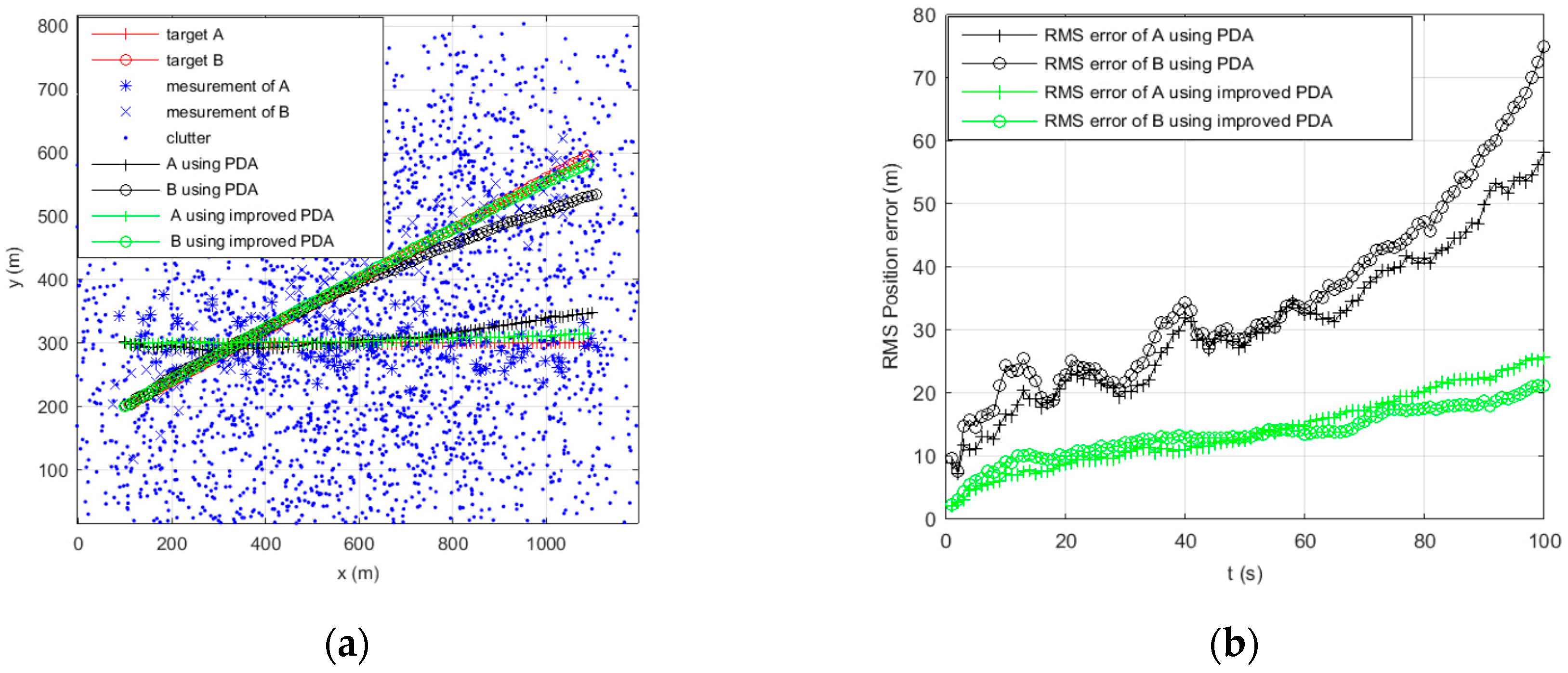
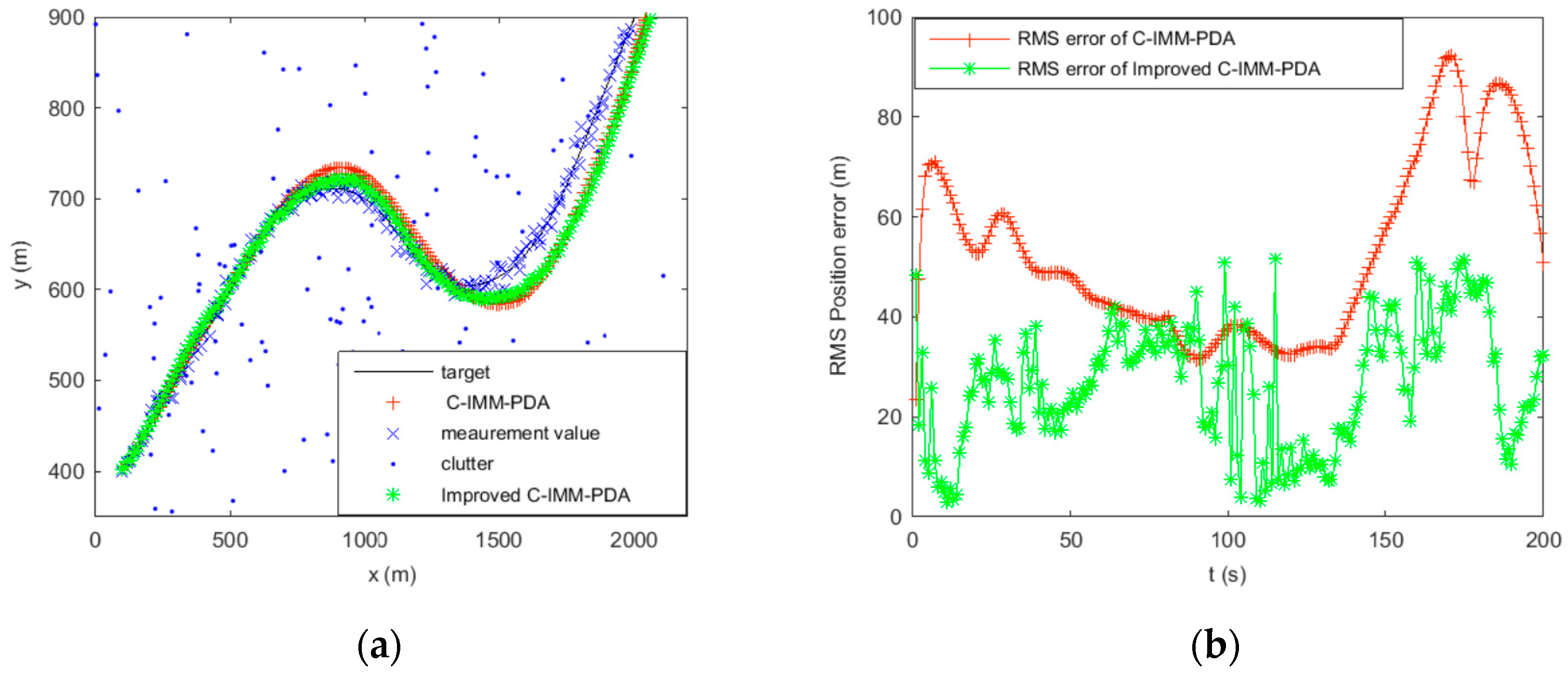
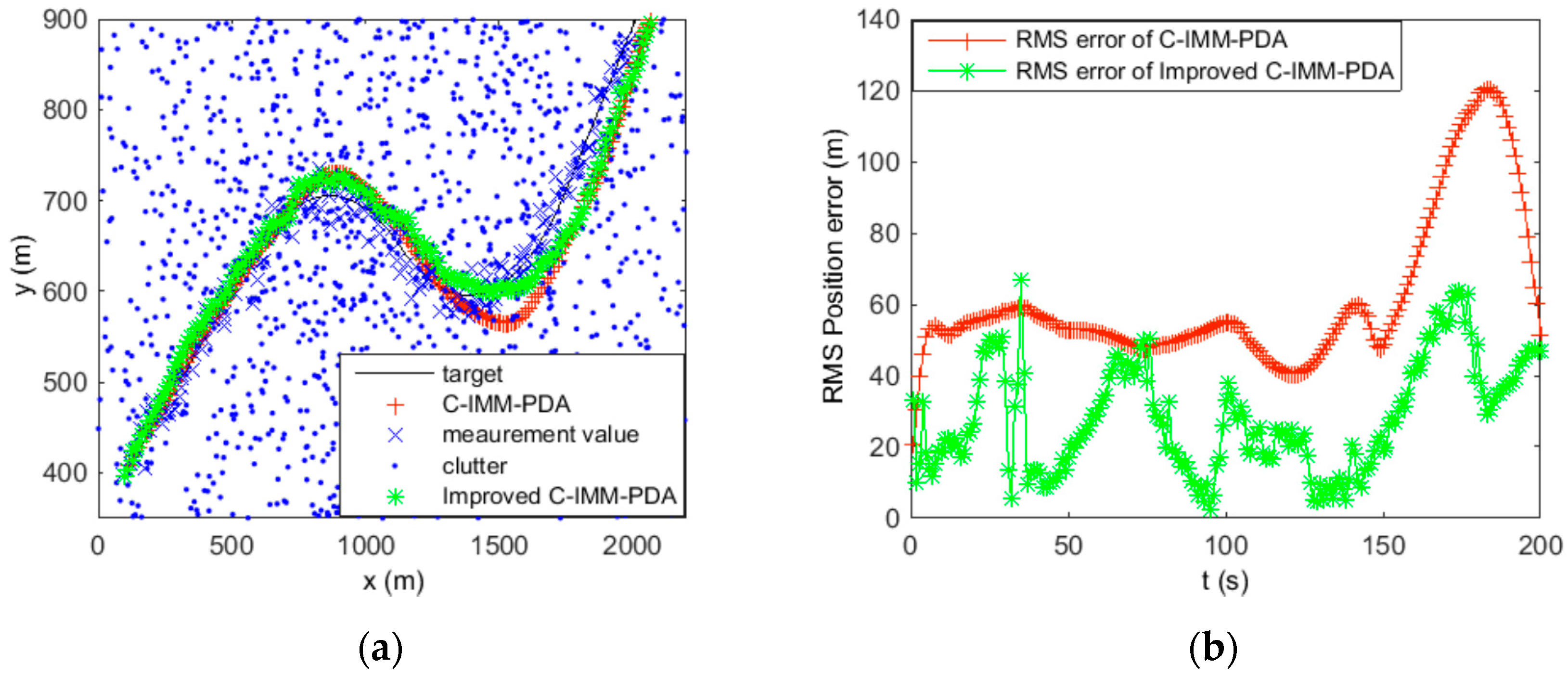
In this paper, we proposed a novel probabilistic data association algorithm based on distance weighting for target tracking. Due to clutter distribution being random, and the measurement originating from the target is more likely closer to the predicted measurement, this important prior information is introduced as a distance weight to optimize the association probability, which can enhance the association probability of the measurement originating from the target. When the improved algorithm is applied to non-maneuvering target tracking, the algorithm can be more accurate to realize the single non-maneuvering target tracking in a densely cluttered environment. For two-target tracking, it can avoid tracking coalescence whatever two targets are in parallel or at a small-angle crossing in a densely cluttered environment. For maneuvering target tracking in densely cluttered environments, based on the frame of C-IMM-PDA, we use the improved PDA to realize the data association and a Kalman filter to estimate the target state. Simulation results show the performance of the improved C-IMM-PDA algorithm is better than the C-IMM-PDA when tracking maneuvering targets in densely cluttered environments. Above all, with the increase of clutter density, the performance of the improved algorithm did not degrade significantly, which can ensure the real-time processing and accuracy of target tracking in densely cluttered environments.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}