
Acoustical Direction Finding with Time-Modulated Arrays


Abstract
:1. Introduction
2. Theory
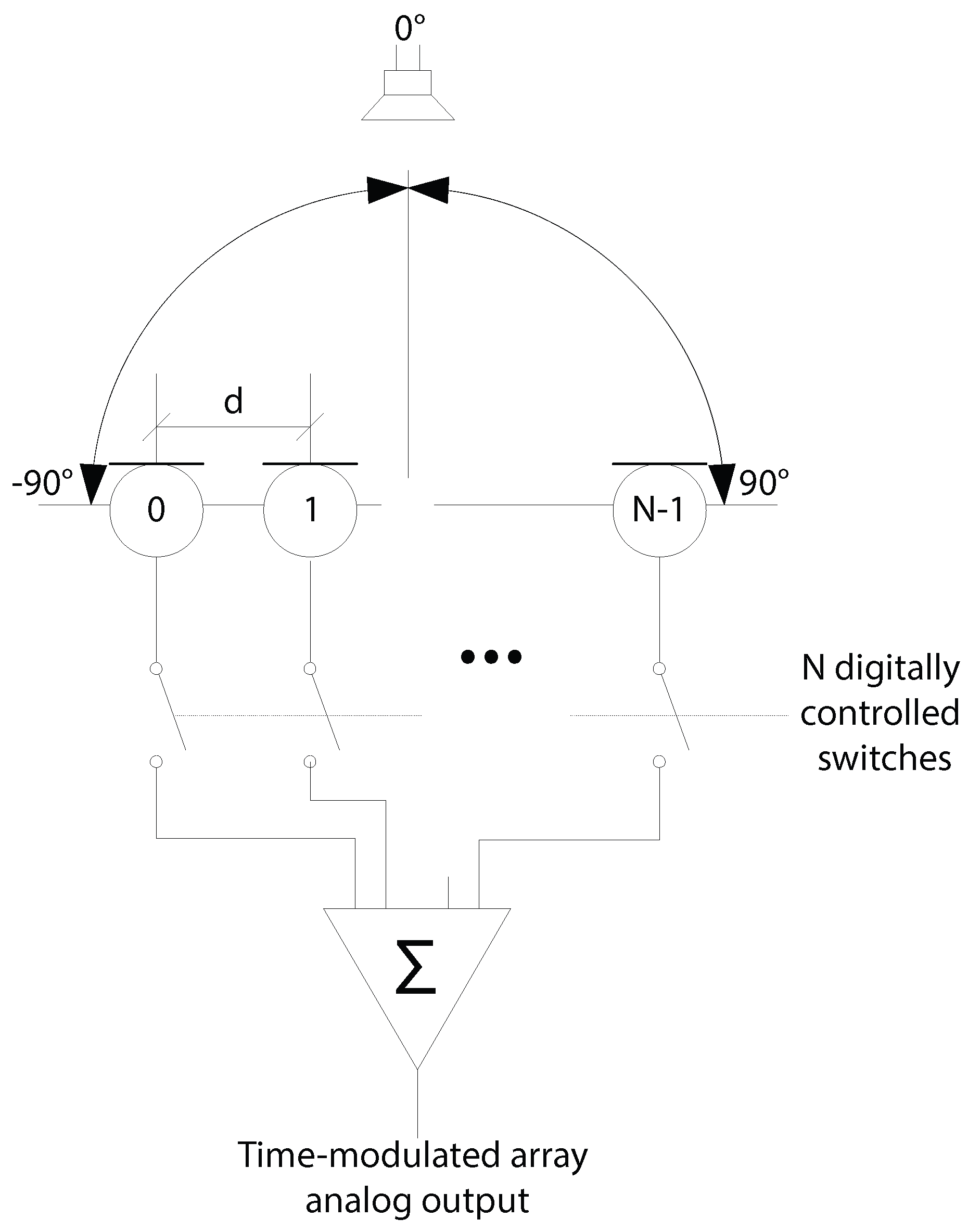
2.1. Background
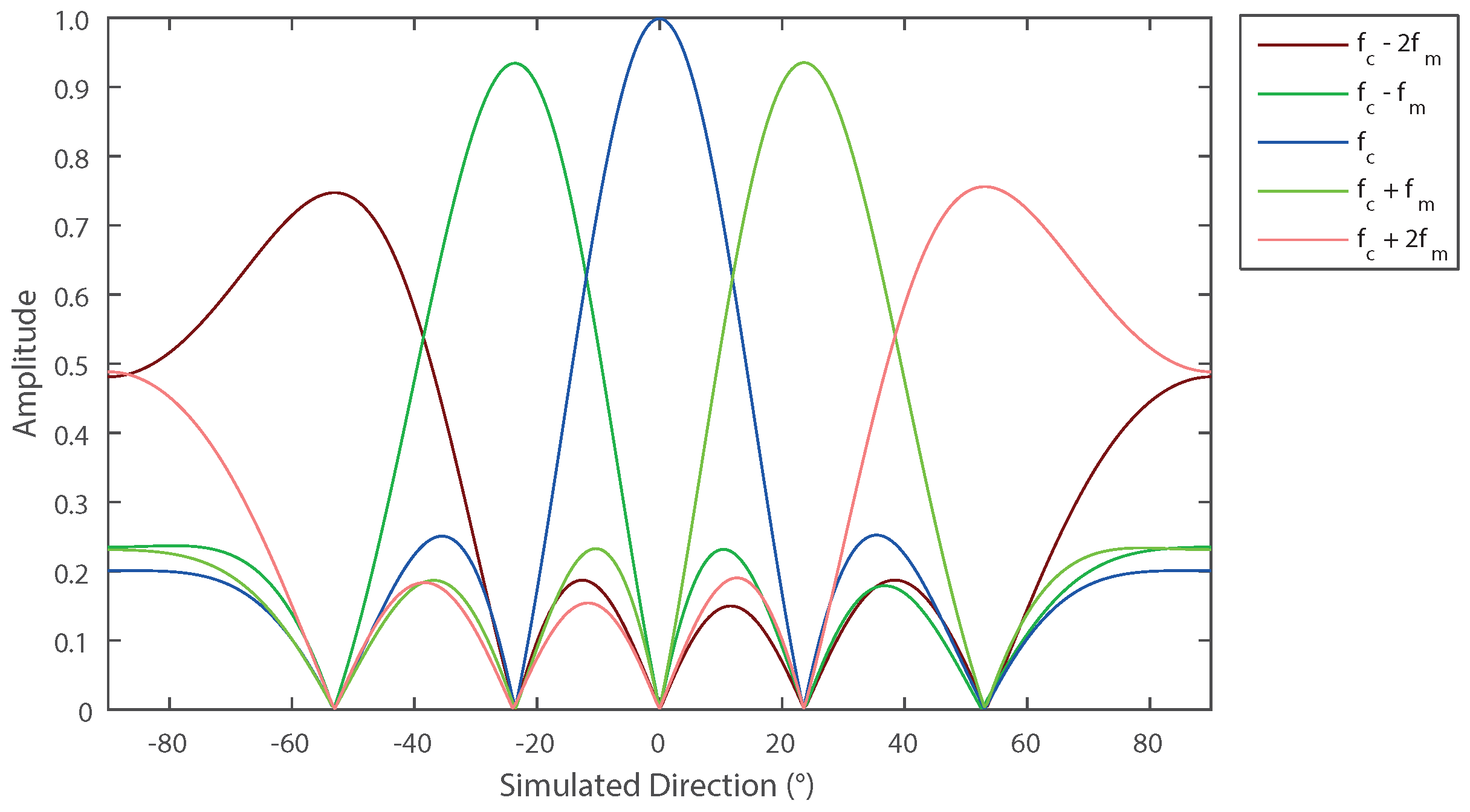
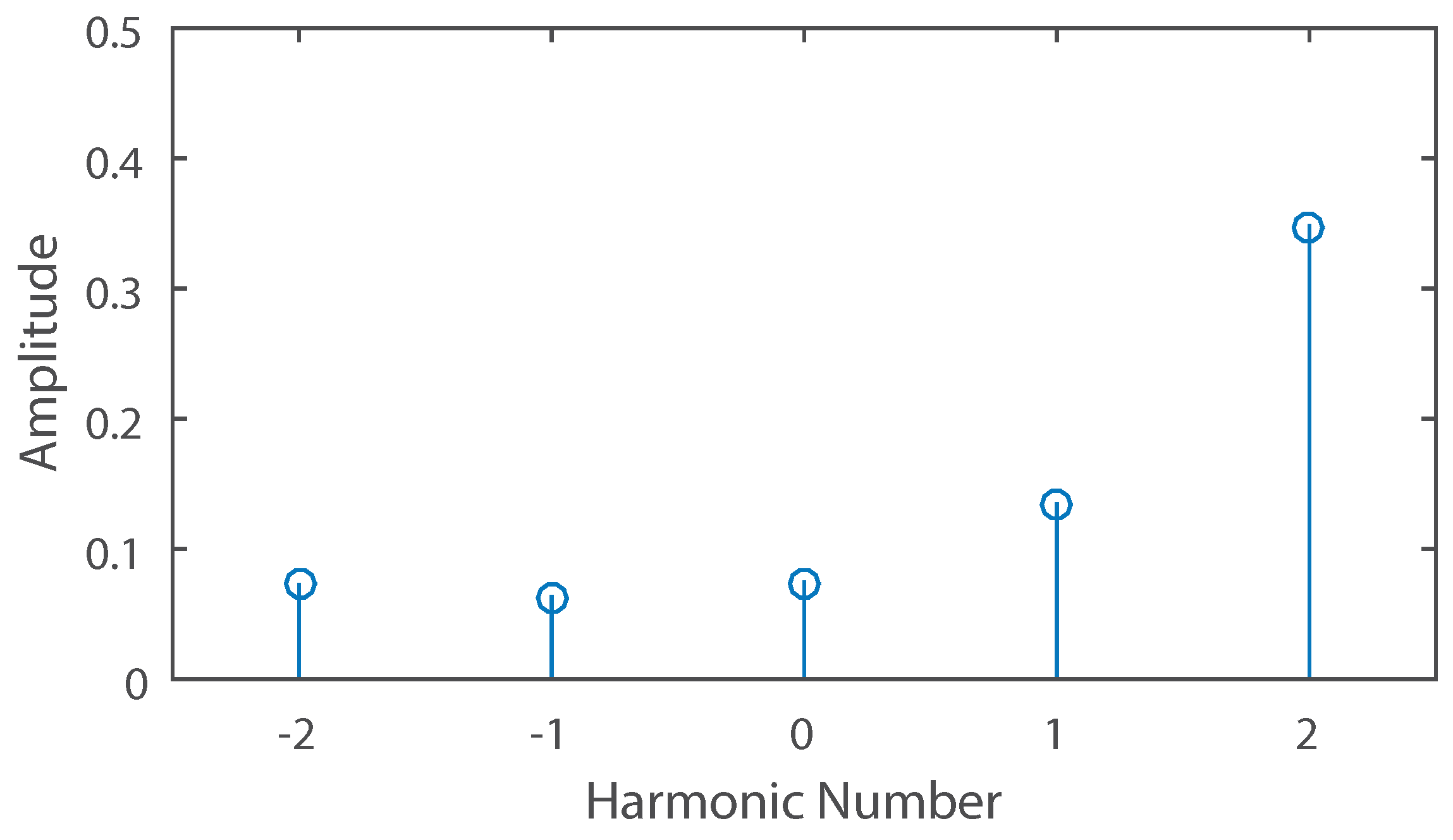
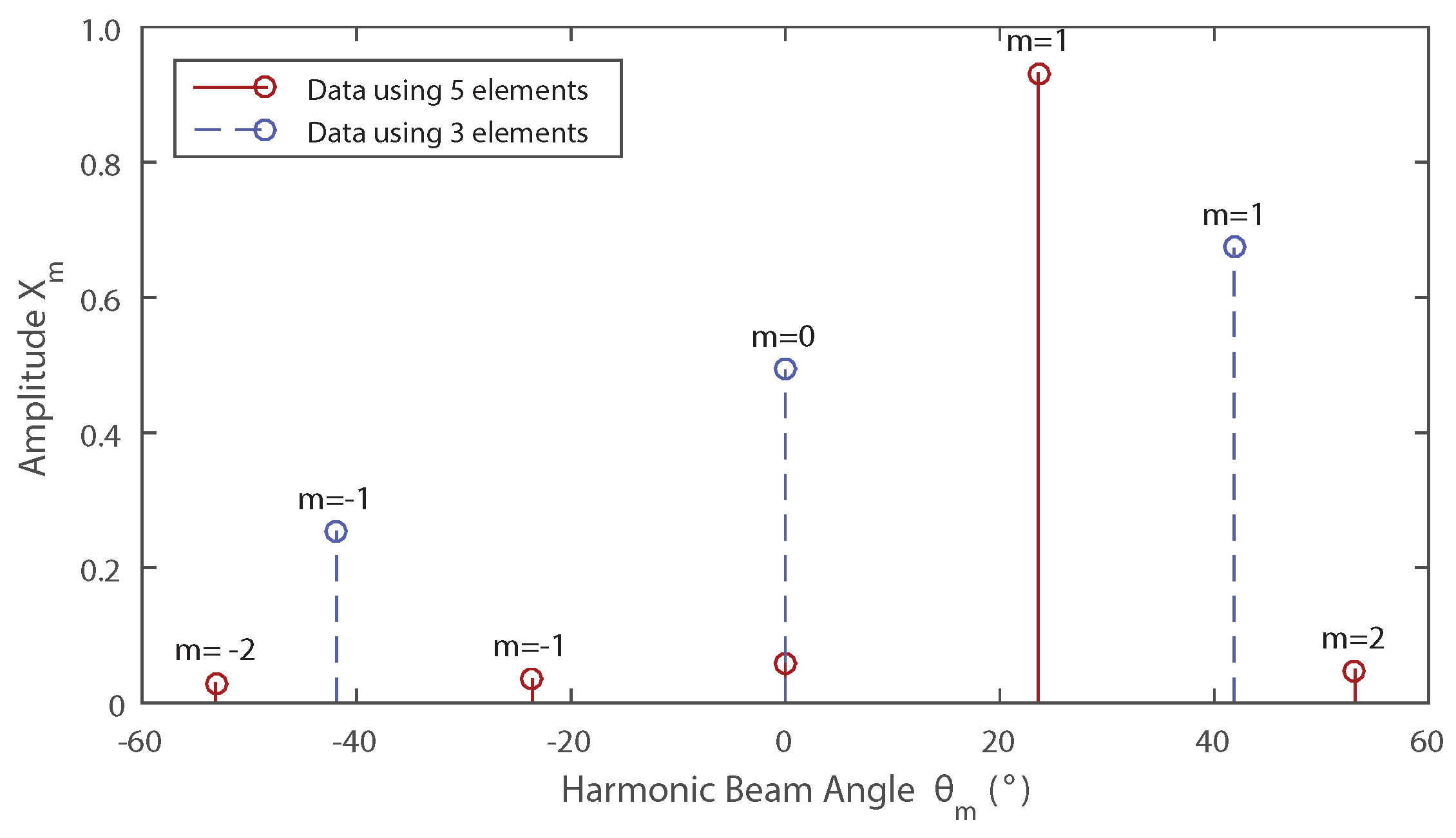
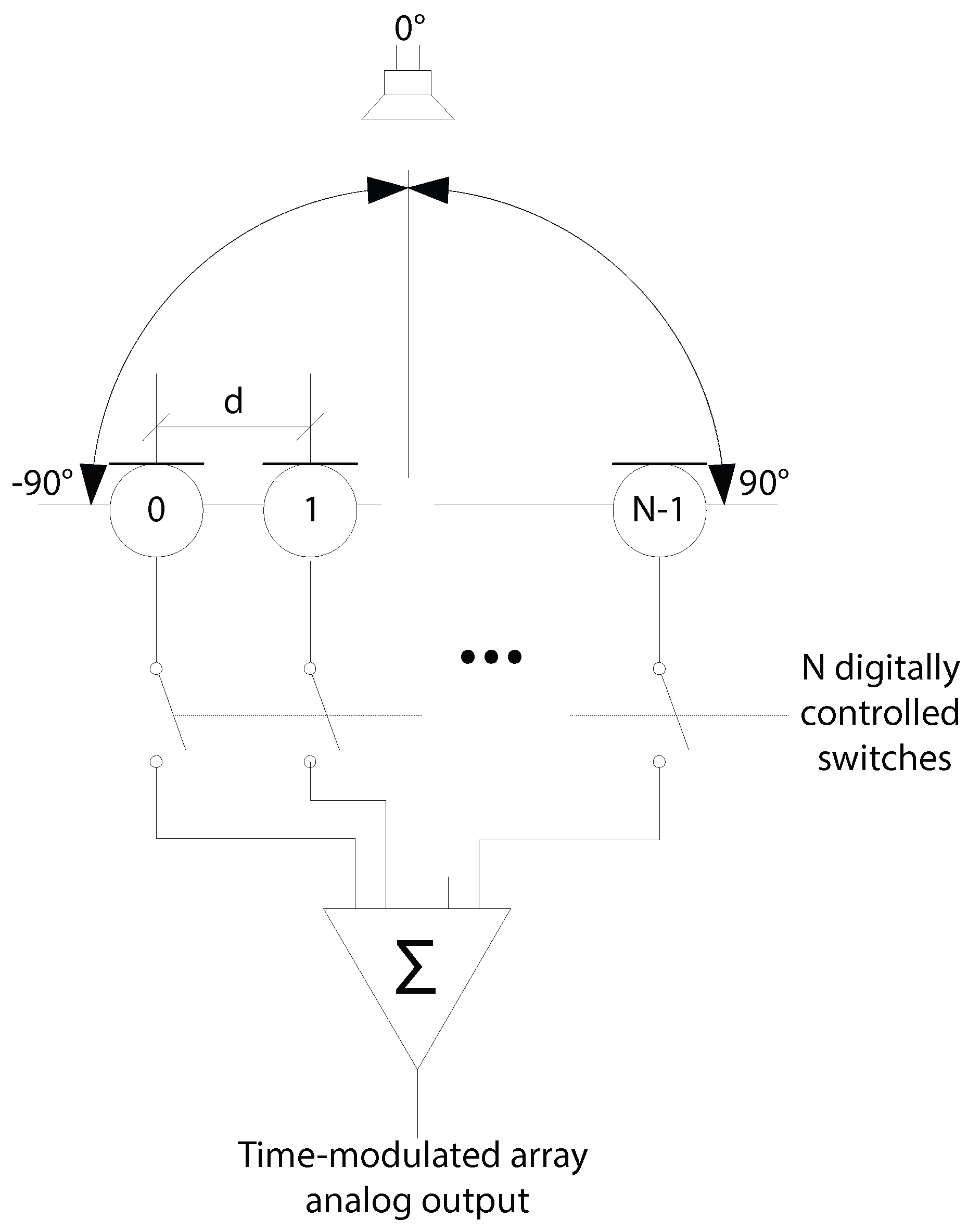
2.2. Proposed Method of Determining the DoA
- Collect a fixed number of samples from each microphone in turn (this can be repeated multiple times, however it is often adequate to do this just once). The harmonic frequency can be calculated as the reciprocal of the time taken to sample the set of all sensors.
- Perform a DFT on the fundamental and expected harmonics of the switching frequency.
- Select the DFT bins with the two largest amplitudes and identify their main beam angles.
- Calculate a DoA using Equation (9)
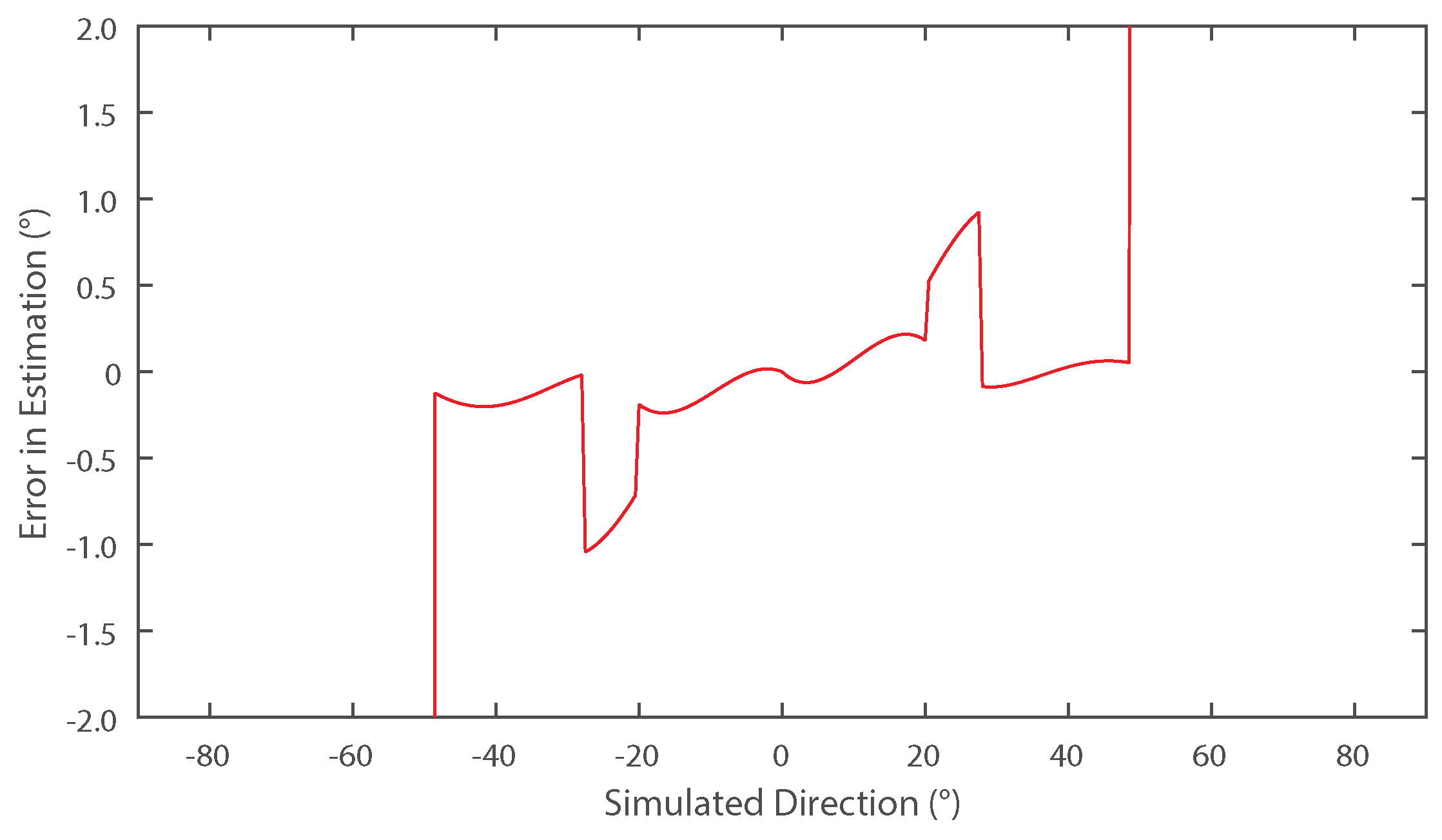
2.2.1. Error Reduction Technique
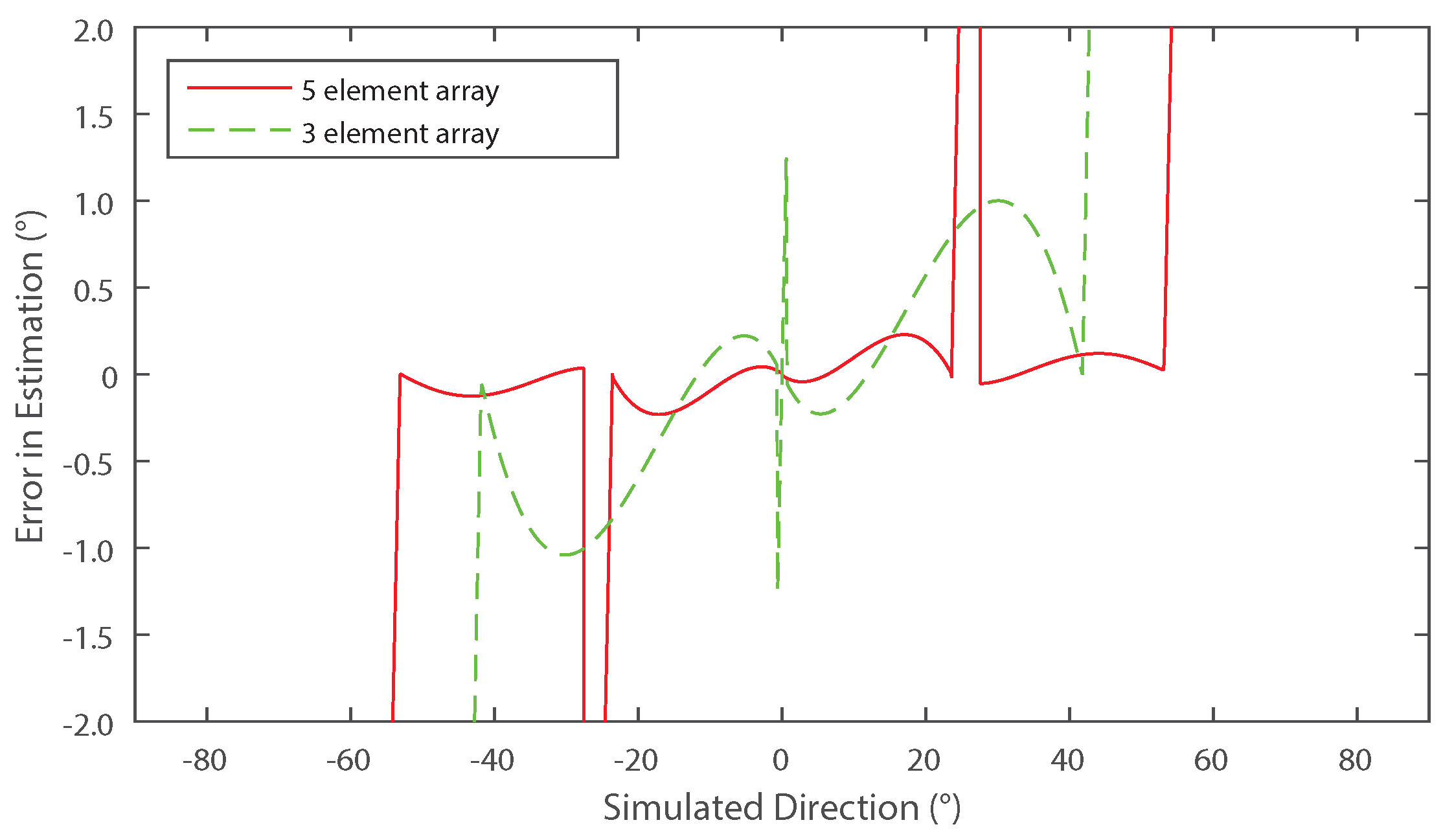
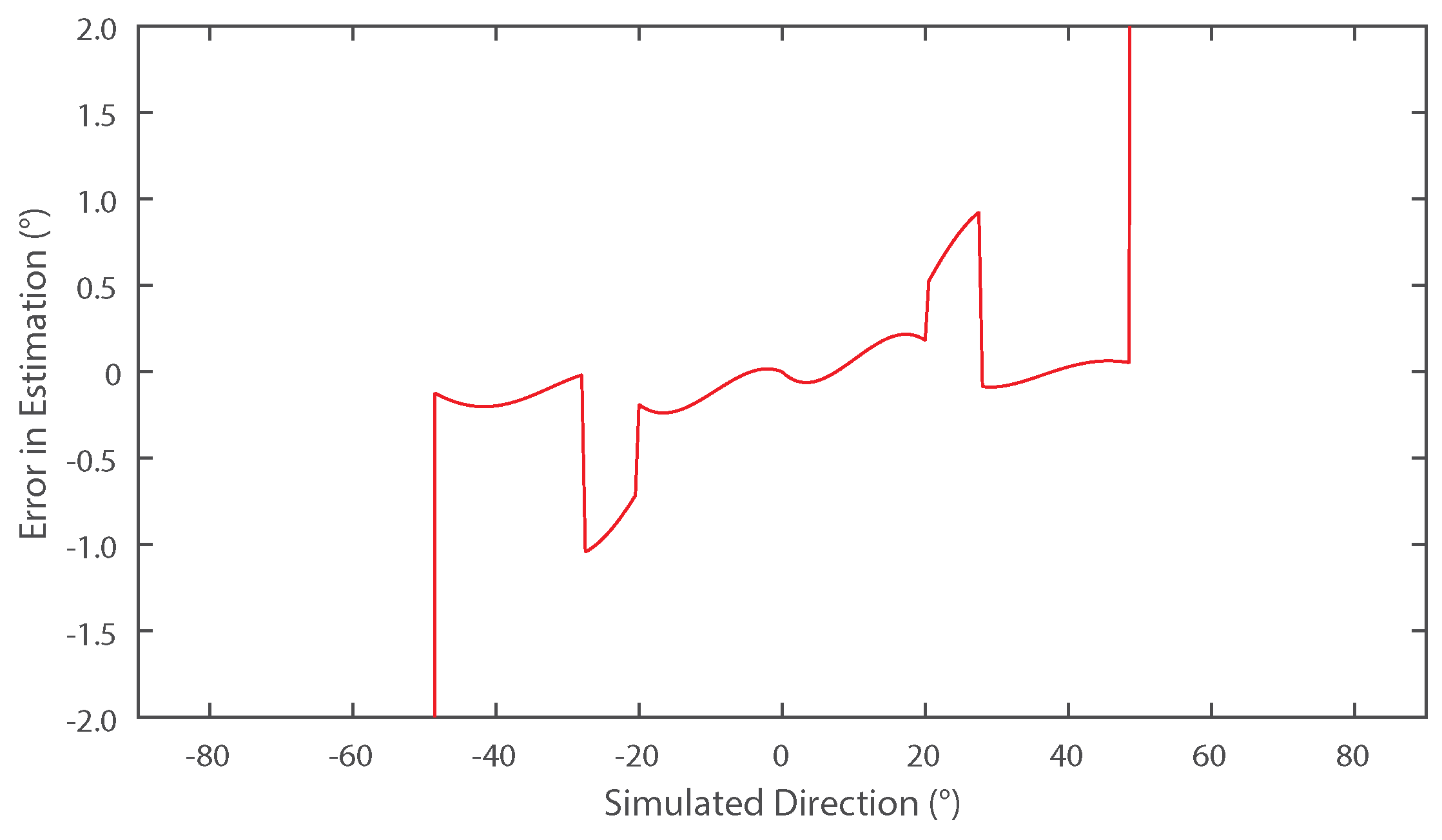
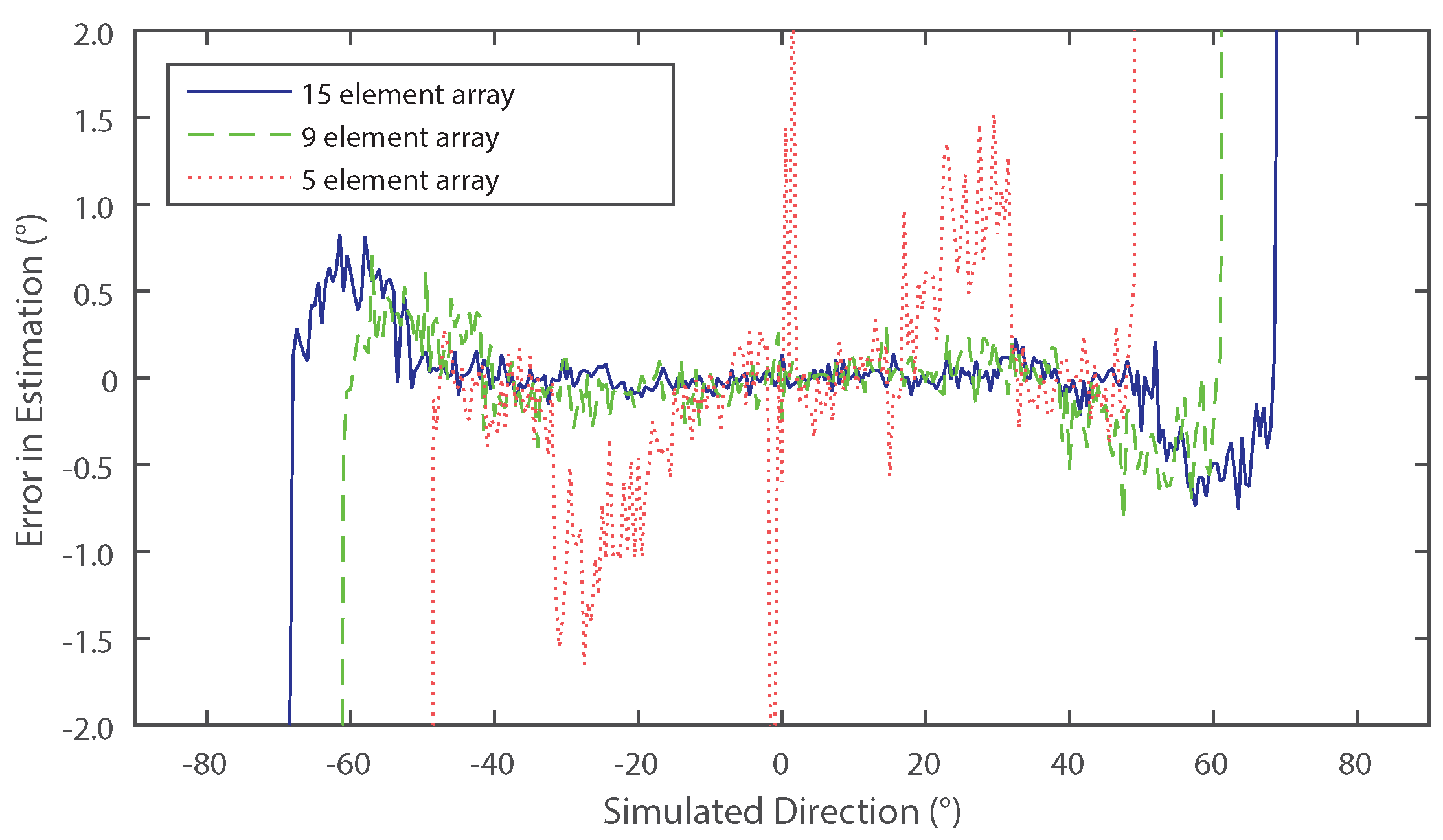
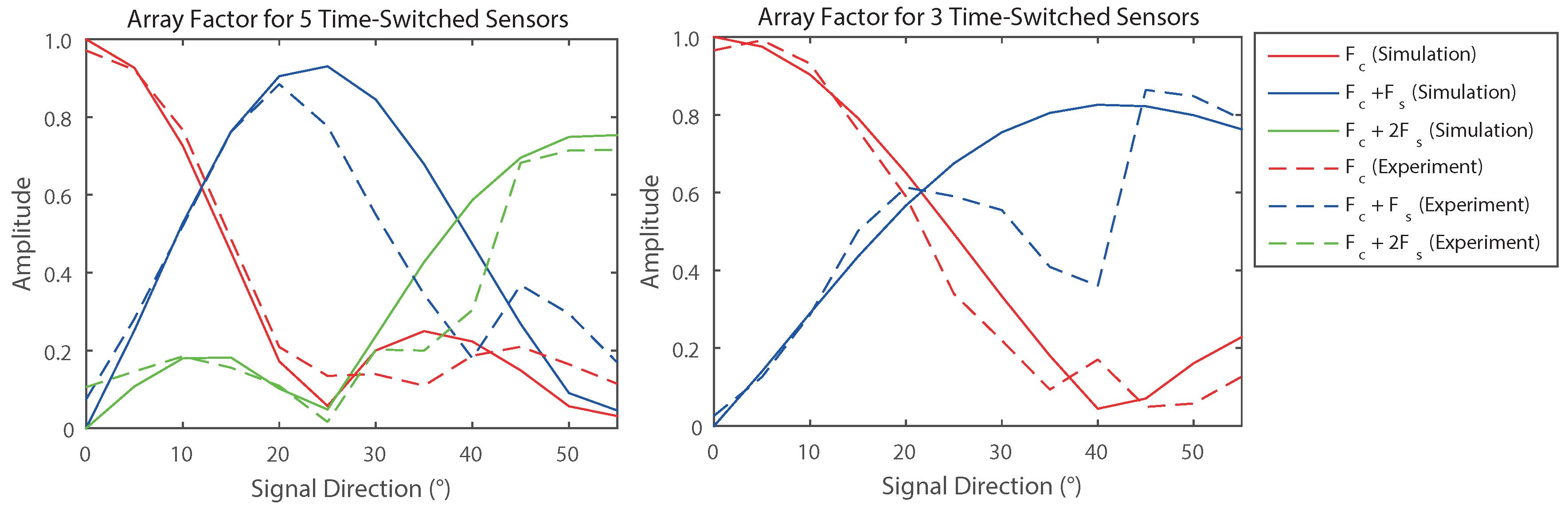
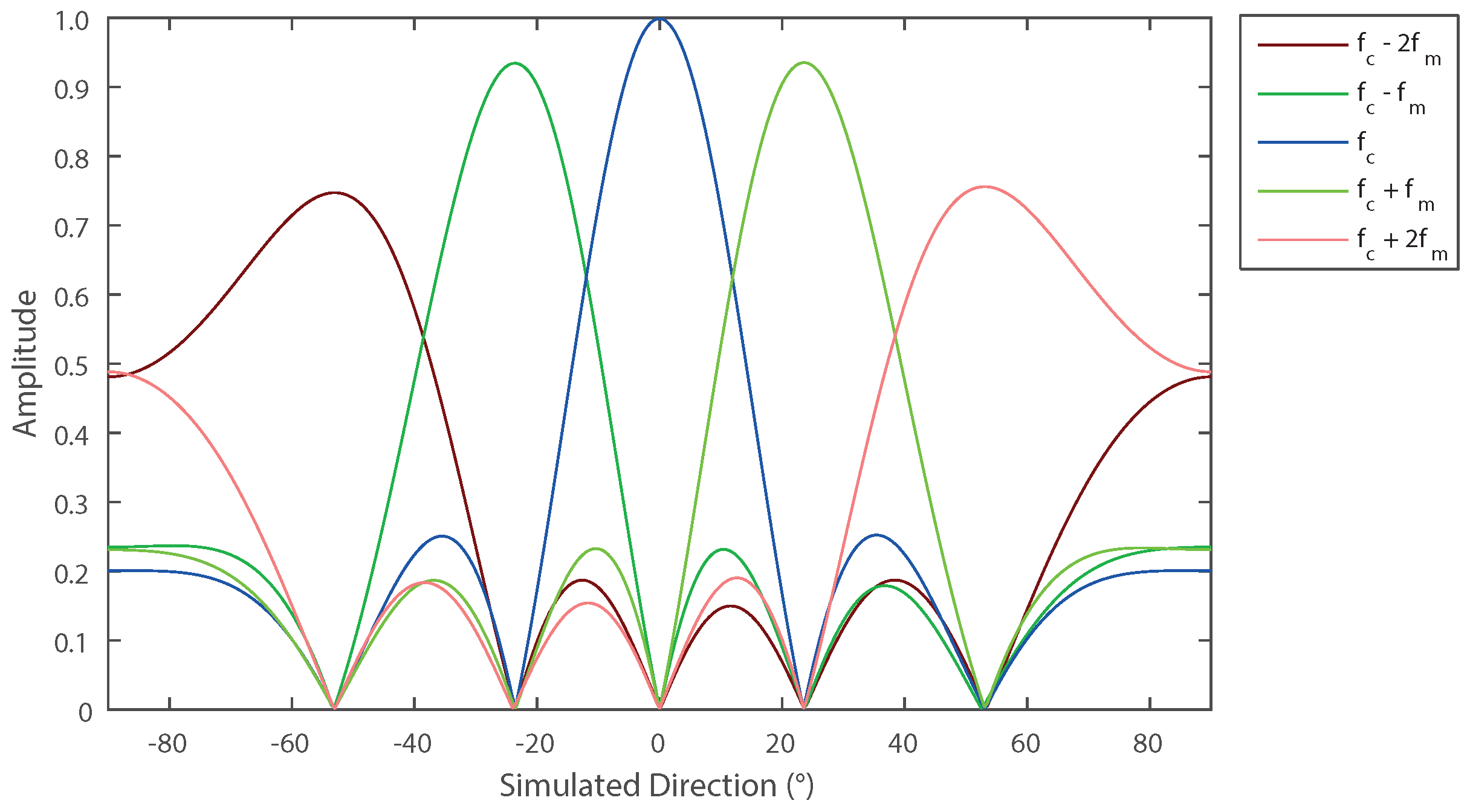
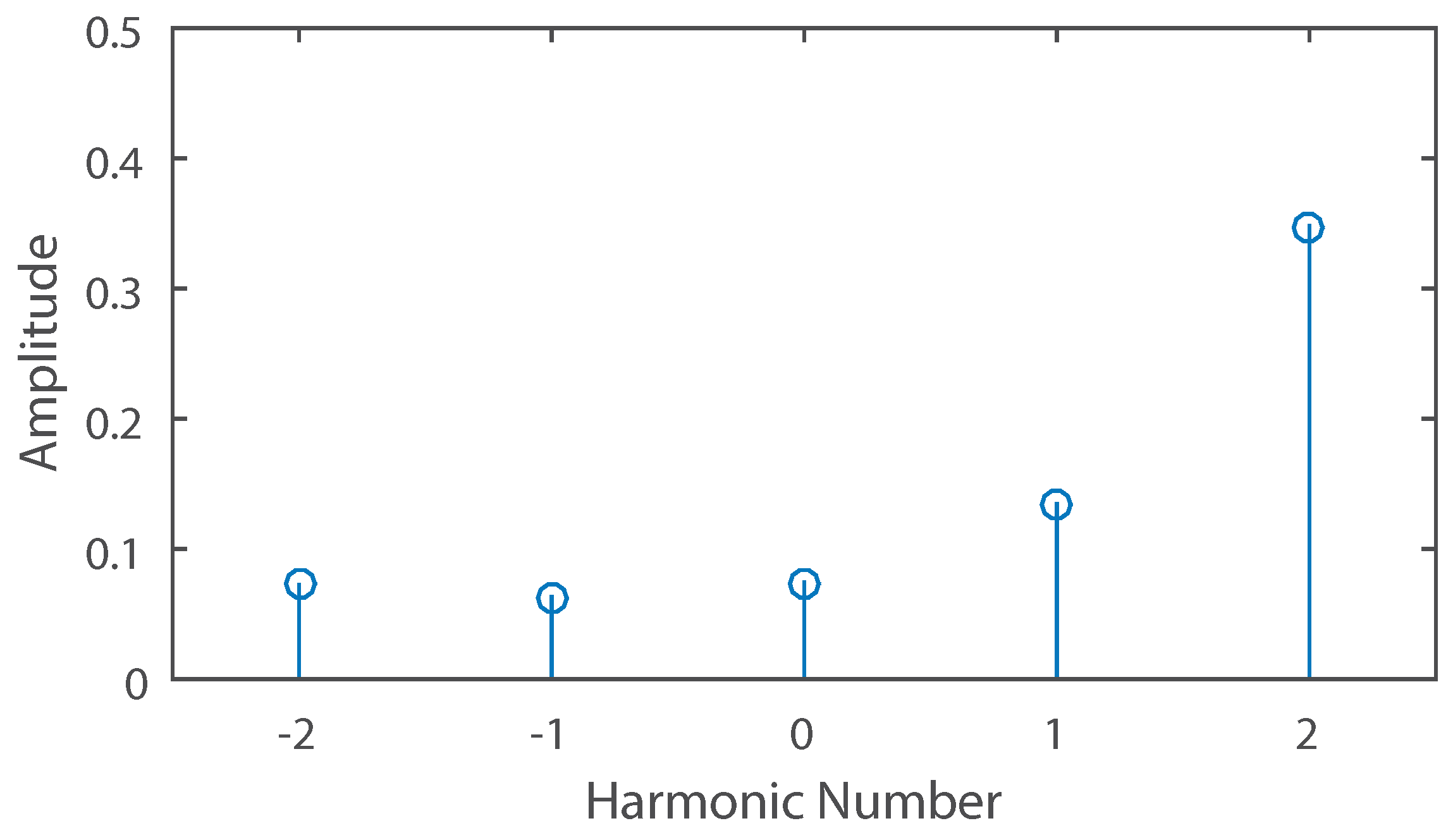
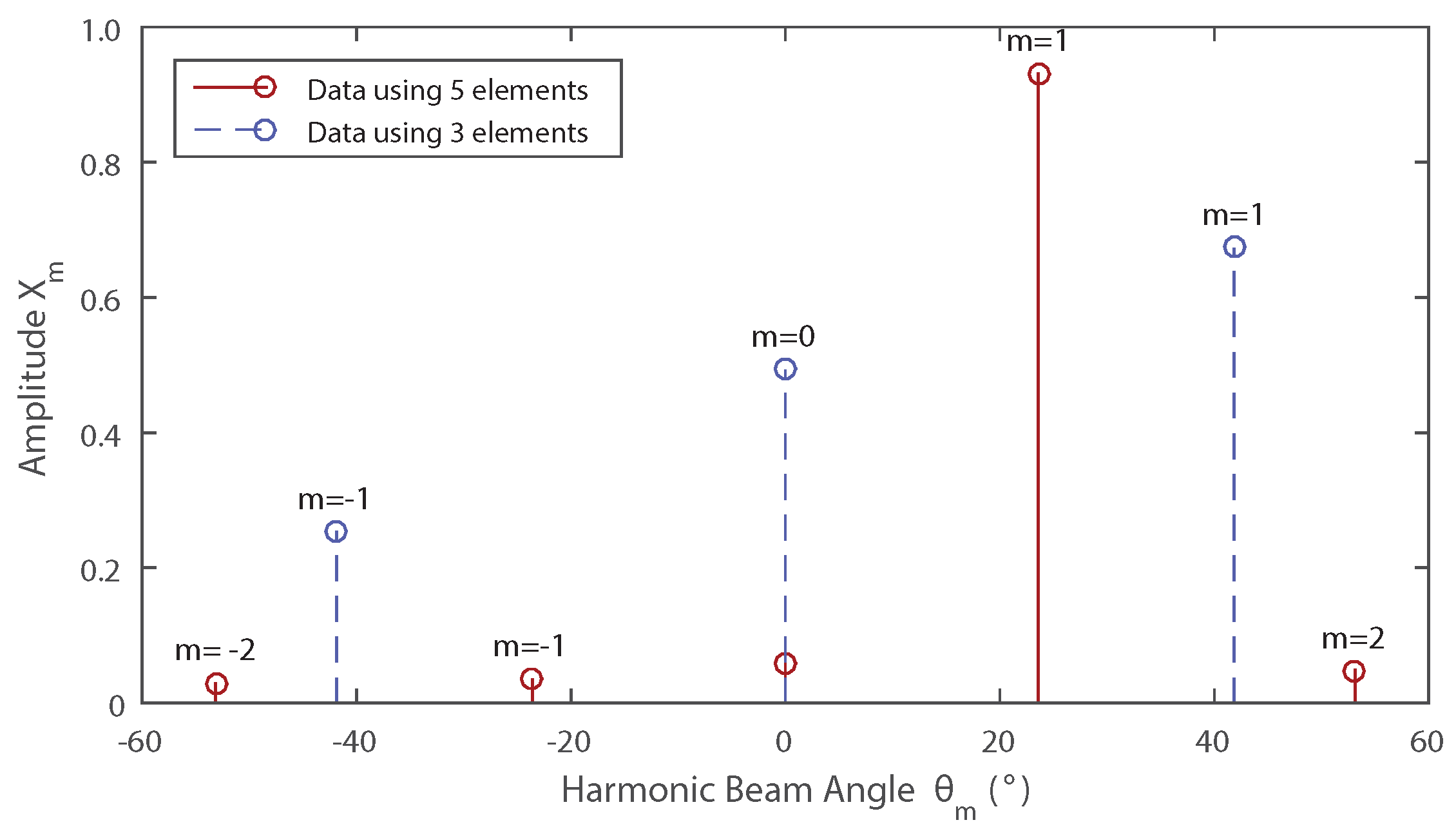
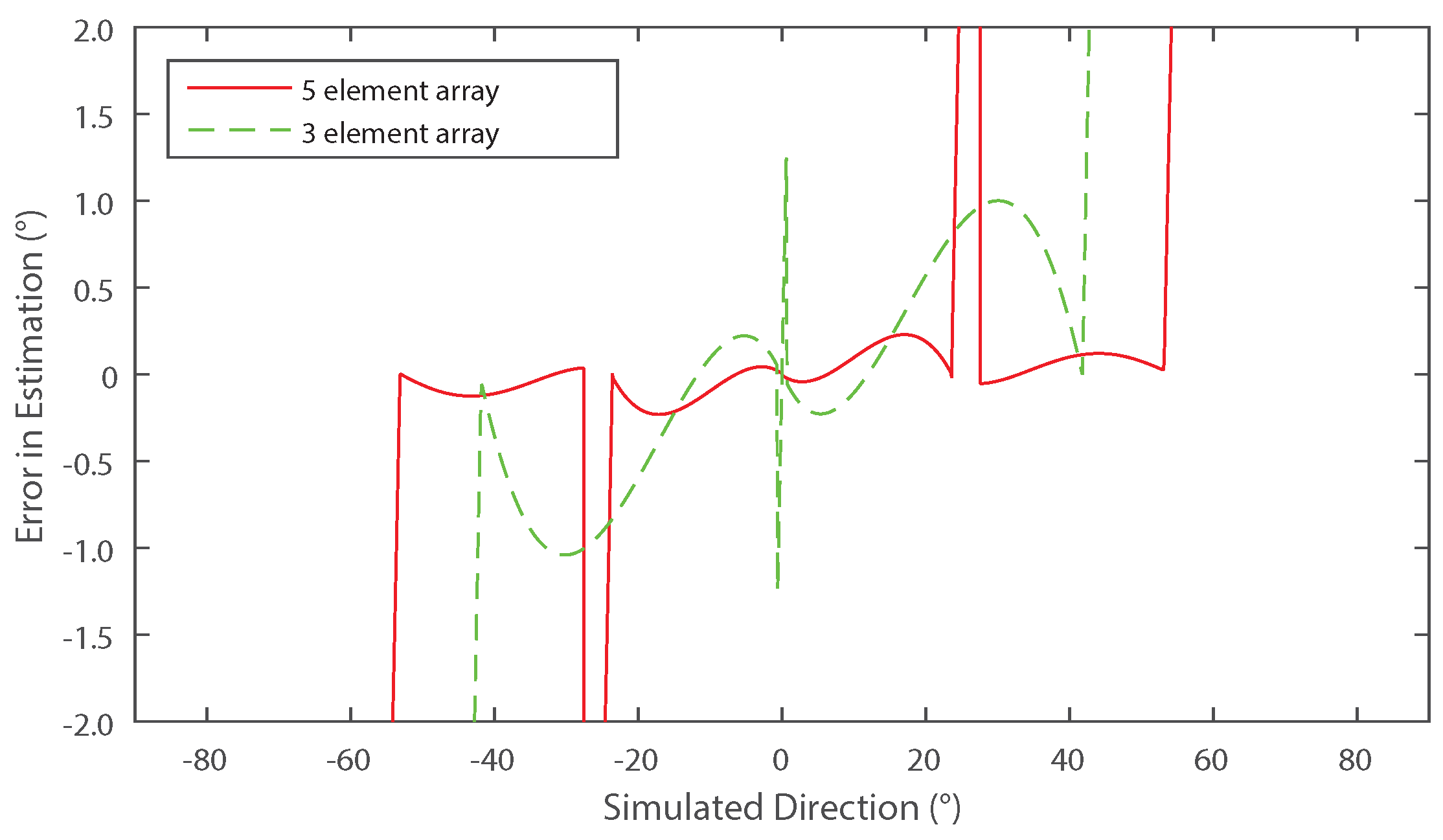
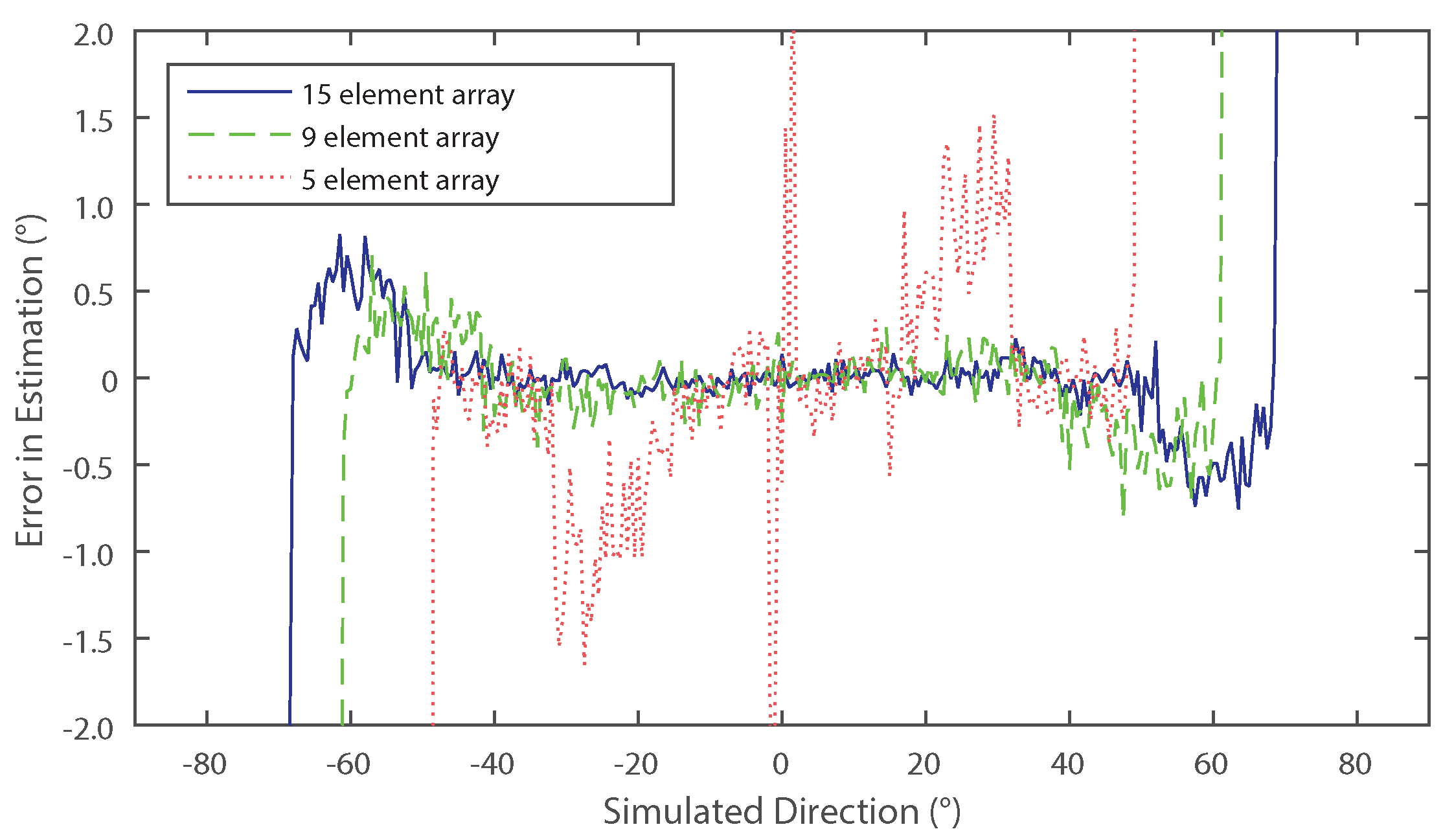
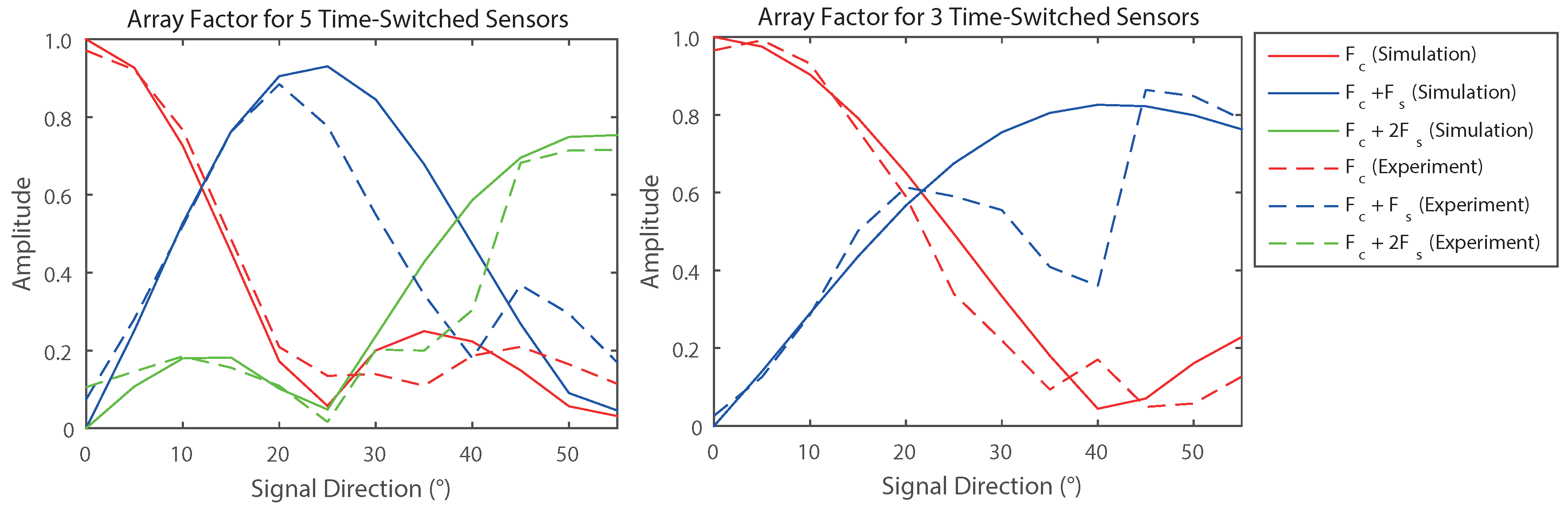
3. Numerical Results
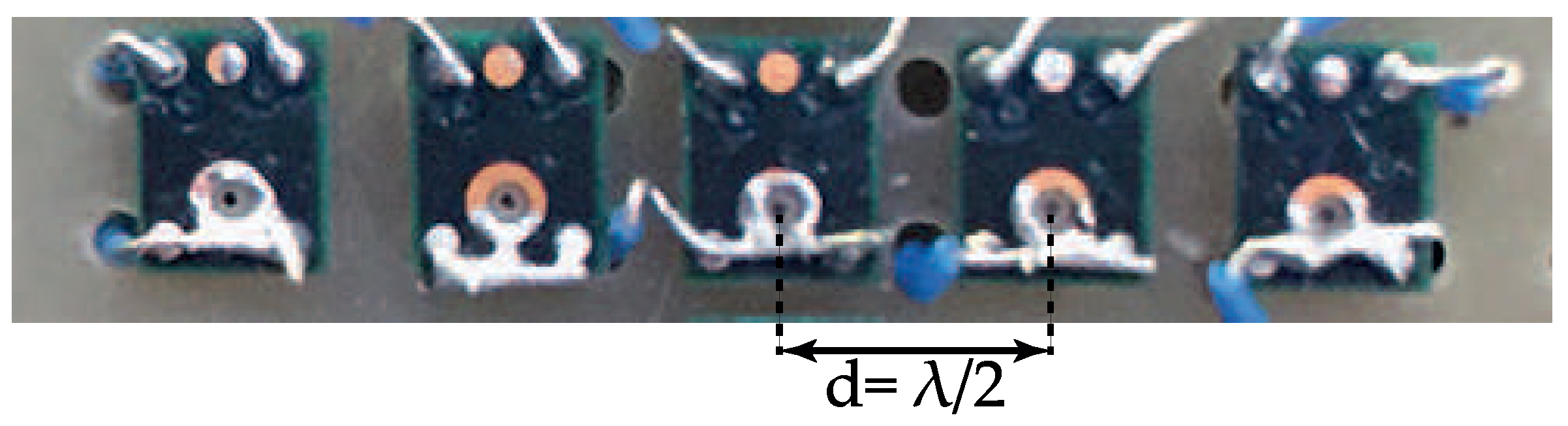
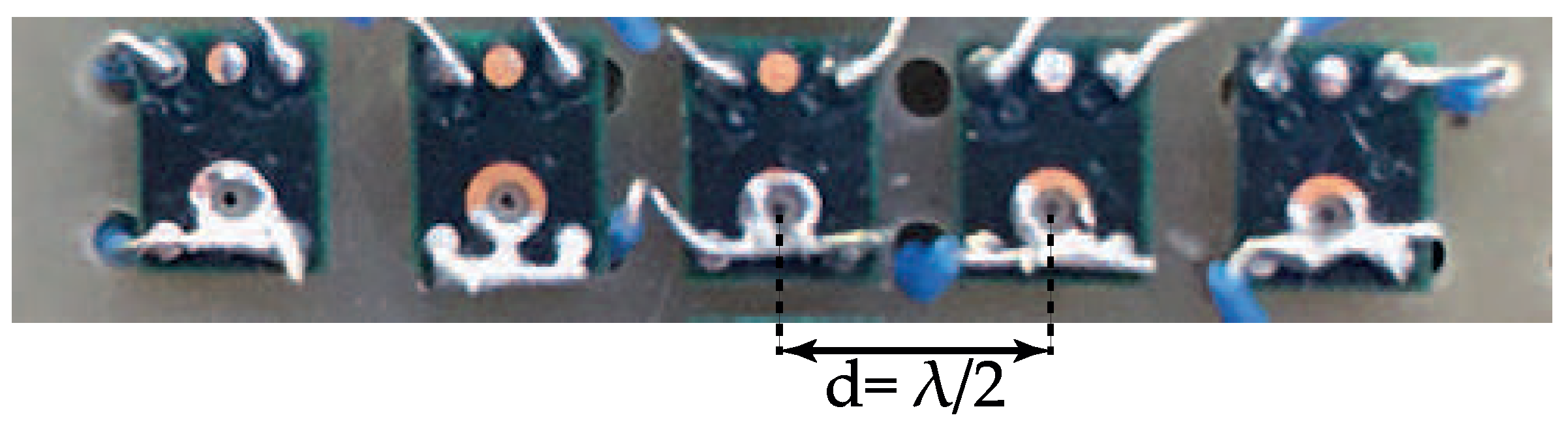
4. Experimental Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bouchard, C.; Havelock, D.I.; Bouchard, M. Beamforming with Microphone Arrays for Directional Sources. J. Acoust. Soc. Am. 2009, 125, 2098–2104. [Google Scholar] [CrossRef] [PubMed]
- Naidu, P.S.; Subramaniyan, R. Direction of Arrival Estimation in the Presence of Distributed Noise Sources: Cumulant Based Approach. J. Acoust. Soc. Am. 1995, 97, 2997. [Google Scholar] [CrossRef]
- Liu, C.; Wheeler, B.C.; O’Brien, W.D.; Bilger, R.C. Localization of Multiple Sound Sources with two Microphones. J. Acoust. Soc. Am. 2000, 108, 1888–1905. [Google Scholar] [CrossRef] [PubMed]
- Schmidt, R.O. Multiple Emitter Location and Signal Parameter Estimation. IEEE Trans. Ant. Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT-Estimation of Signal Parameters via Rotational Invariance Techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef]
- Webb, P.; Wykes, C. High-Resolution Beam Forming for Ultrasonic Arrays. IEEE Trans. Robot. Autom. 1996, 12, 138–146. [Google Scholar] [CrossRef]
- Munro, W.S.H.; Pomeroy, S.; Rafiq, M.; Williams, H.R.; Wybrow, M.D.; Wykes, C. Ultrasonic Vehicle Guidance Transducer. Ultrasonics 1990, 80, 350–354. [Google Scholar] [CrossRef]
- Kunin, V.; Turqueti, M.; Saniie, J.; Oruklu, E. Direction of Arrival Estimation and Localization Using Acoustic Sensor Arrays. J. Sens. Technol. 2011, 1, 71–80. [Google Scholar] [CrossRef]
- Harput, S.; Bozkurt, A. Ultrasonic Phased Array Device for Acoustic Imaging in Air. IEEE Sens. 2008, 8, 1755–1762. [Google Scholar] [CrossRef]
- Shanks, H.E.; Bickmore, R.W. Four-Dimensional Electromagnetic Radiators. Can. J. Phys. 1959, 37, 263–275. [Google Scholar] [CrossRef]
- Shanks, H.E. A New Technique for Electronic Scanning. IRE Trans. Ant. Propag. 1961, 9, 162–166. [Google Scholar] [CrossRef]
- Li, G.; Yang, S.; Nie, Z. Direction of Arrival Estimation in Time Modulated Linear Arrays With Unidirectional Phase Center Motion. IEEE Trans. Ant. Propag. 2010, 58, 1105–1111. [Google Scholar]
- Liu, C.; Yang, S.; Zhu, Q. Direction of Arrival Estimation based on Time-Modulated Antenna Array. In Proceedings of the 2014 IEEE Antennas and Propagation Society International Symposium (APSURSI), Memphis, TN, USA, 6–11 July 2014.
- Tennant, A. Experimental Two-Element Time-Modulated Direction Finding Array. IEEE Trans. Ant. Propag. 2010, 58, 986–988. [Google Scholar] [CrossRef]
- He, C.; Liang, X.; Li, Z.; Geng, J.; Jin, R. Direction Finding by Time-Modulated Array With Harmonic Characteristic Analysis. IEEE Ant. Wirel. Propag. Lett. 2015, 14, 642–645. [Google Scholar] [CrossRef]
- Tong, Y. Time Modulated Linear Arrays. Ph.D Thesis, University of Sheffield, Sheffield, UK, August 2013. [Google Scholar]
- Tong, Y.; Tennant, A. A Two-Channel Time Modulated Linear Array With Adaptive Beamforming. IEEE Trans. Ant. Propag. 2012, 60, 141–147. [Google Scholar] [CrossRef]
- Knowles Accoustics. SPU0410LR5H-QB Product Datasheet. Available online: http://www.knowles.com/eng/content/download/5755/91802/version/3/file/SPU0410LR5H-QB+revH.PDF (accessed on 25 October 2016).
- Goertzel, G. An Algorithm for the Evaluation of Finite Trigonometric Series. Am. Math. Mon. 1958, 65, 34–35. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| θ | Using 5 Elements | Using 3 Elements | Absolute Error () |
|---|---|---|---|
| 00 | −2.457 | −3.034 | 2.457 |
| 05 | 05.519 | 04.714 | 0.519 |
| 10 | 09.523 | 09.815 | 0.477 |
| 15 | 14.390 | 16.608 | 0.610 |
| 20 | 21.048 | 21.310 | 0.924 |
| 23.6 | 19.853 | 24.331 | 0.731 |
| 25 | 20.094 | 26.542 | 1.542 |
| 30 | 31.533 | 29.953 | 1.533 |
| 35 | 34.440 | 34.027 | 0.560 |
| 40 | 42.142 | 28.376 | 2.142 |
| 45 | 42.777 | 39.570 | 2.223 |
| 50 | 44.499 | 39.147 | 5.501 |
| 55 | 47.483 | 36.020 | 7.517 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Clark, B.; Flint, J.A. Acoustical Direction Finding with Time-Modulated Arrays. Sensors 2016, 16, 2107. https://doi.org/10.3390/s16122107
Clark B, Flint JA. Acoustical Direction Finding with Time-Modulated Arrays. Sensors. 2016; 16(12):2107. https://doi.org/10.3390/s16122107
Chicago/Turabian StyleClark, Ben, and James A. Flint. 2016. "Acoustical Direction Finding with Time-Modulated Arrays" Sensors 16, no. 12: 2107. https://doi.org/10.3390/s16122107
APA StyleClark, B., & Flint, J. A. (2016). Acoustical Direction Finding with Time-Modulated Arrays. Sensors, 16(12), 2107. https://doi.org/10.3390/s16122107