
Enabling SDN in VANETs: What is the Impact on Security?

 , , and
, , and
Abstract
:1. Introduction
- A detailed survey of studies conducted by the research community for enabling SDN in VANETs is provided. While the applicability of SDN in vehicular networks has been discussed in several works, such a comprehensive overview with in-depth technical explanations is unprecedented.
- The awareness of the impact that SDN could have on security when applying such a paradigm in smart cities is raised for the first time.
- The introduction of a clear vision of the novel security countermeasures that SDN could build against some traditional attacks in VANETs, is totally novel and unprecedented.
- Finally, the applicability of the study in four concrete use cases shows the feasibility of the proposed solutions that are destined to be successfully implemented in future smart cities.
2. SDN for Resource and Mobility Management
2.1. SDN: An Overview
2.2. SDN in VANETs
3. Use Cases in Future SDN-Based VANETs
3.1. Smart Parking
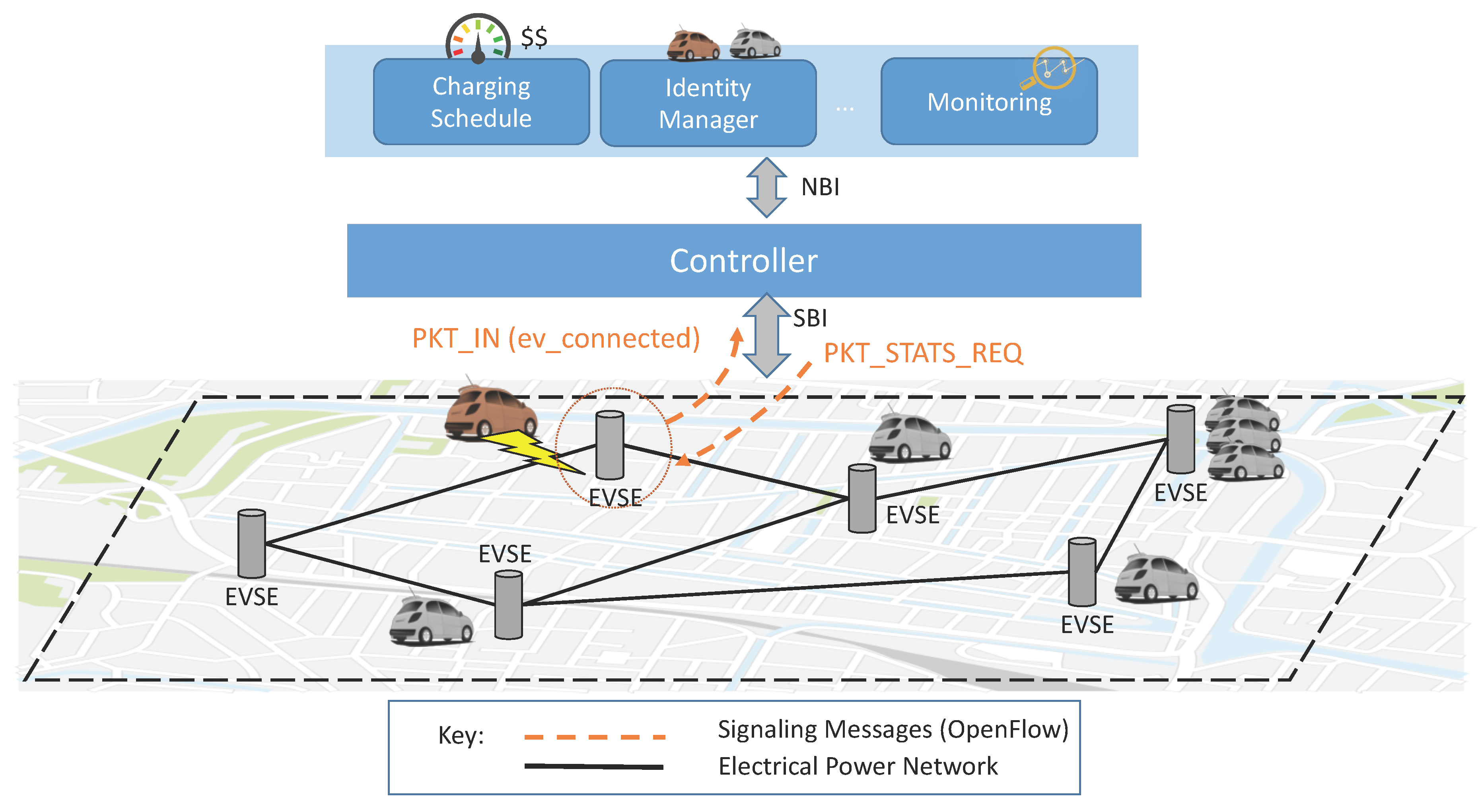
3.2. Smart Grid of Electric Vehicles
3.3. Platooning
3.4. Emergency Services
4. Security of SDN and VANETs
4.1. Security Threats in VANETs
4.2. Security Threats in SDN
5. Improving VANETs Security Using SDN Paradigm
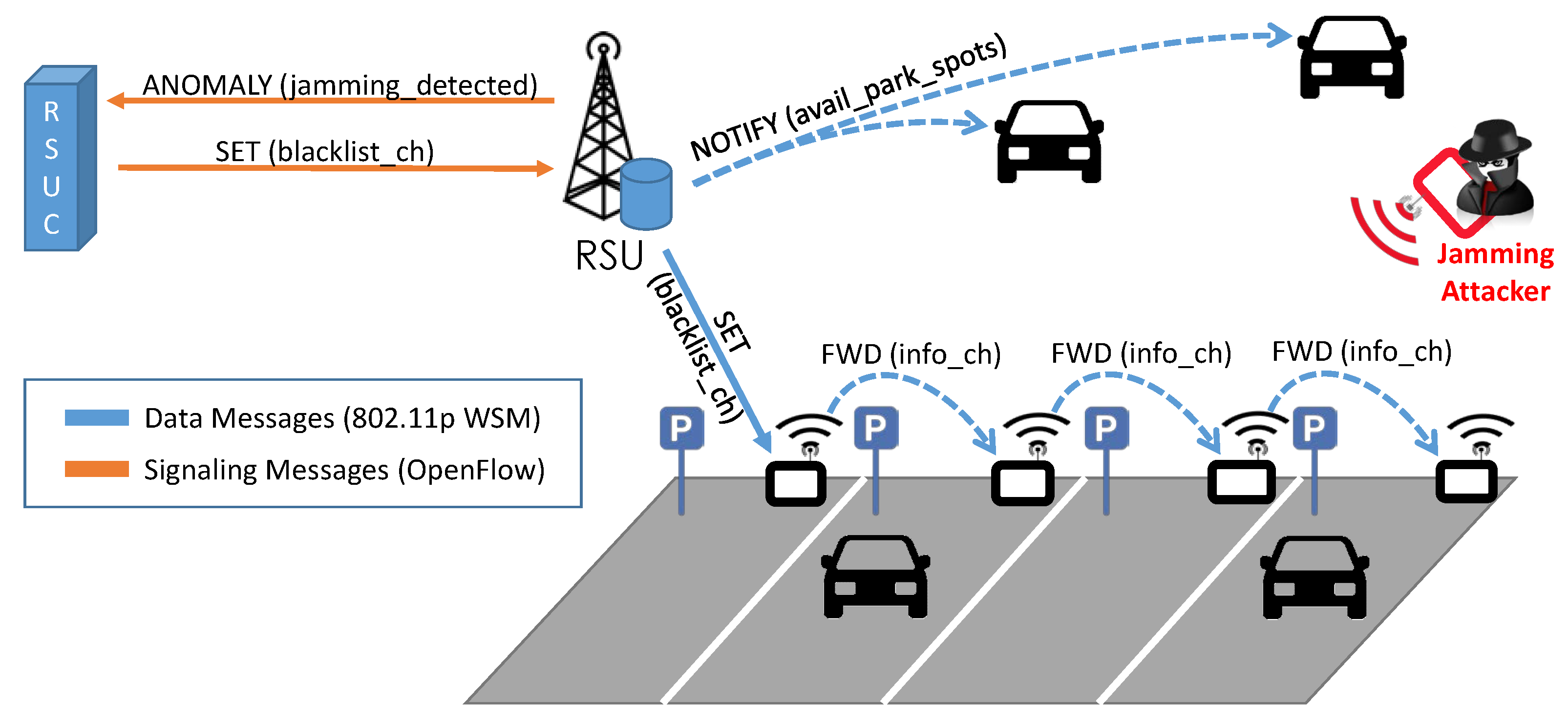
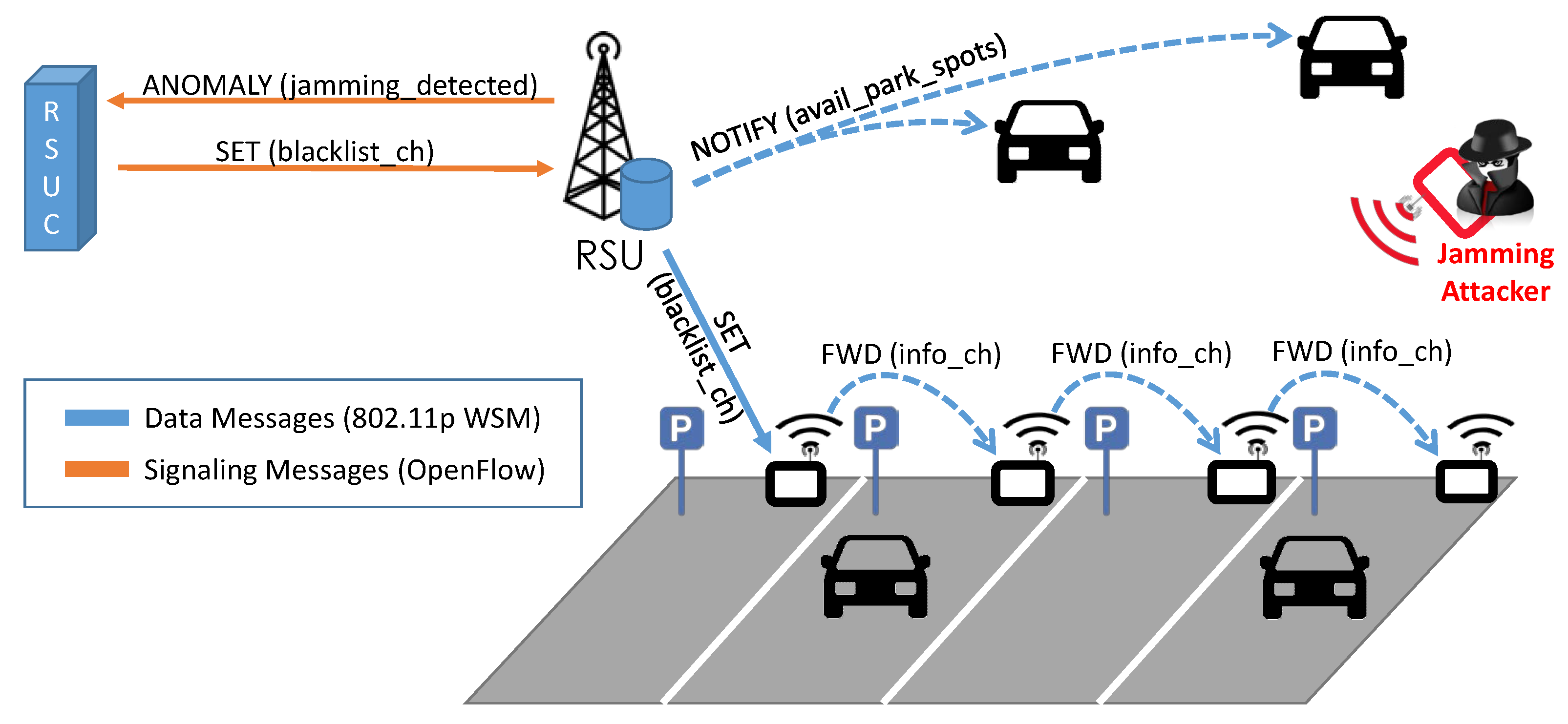
5.1. Smart Parking
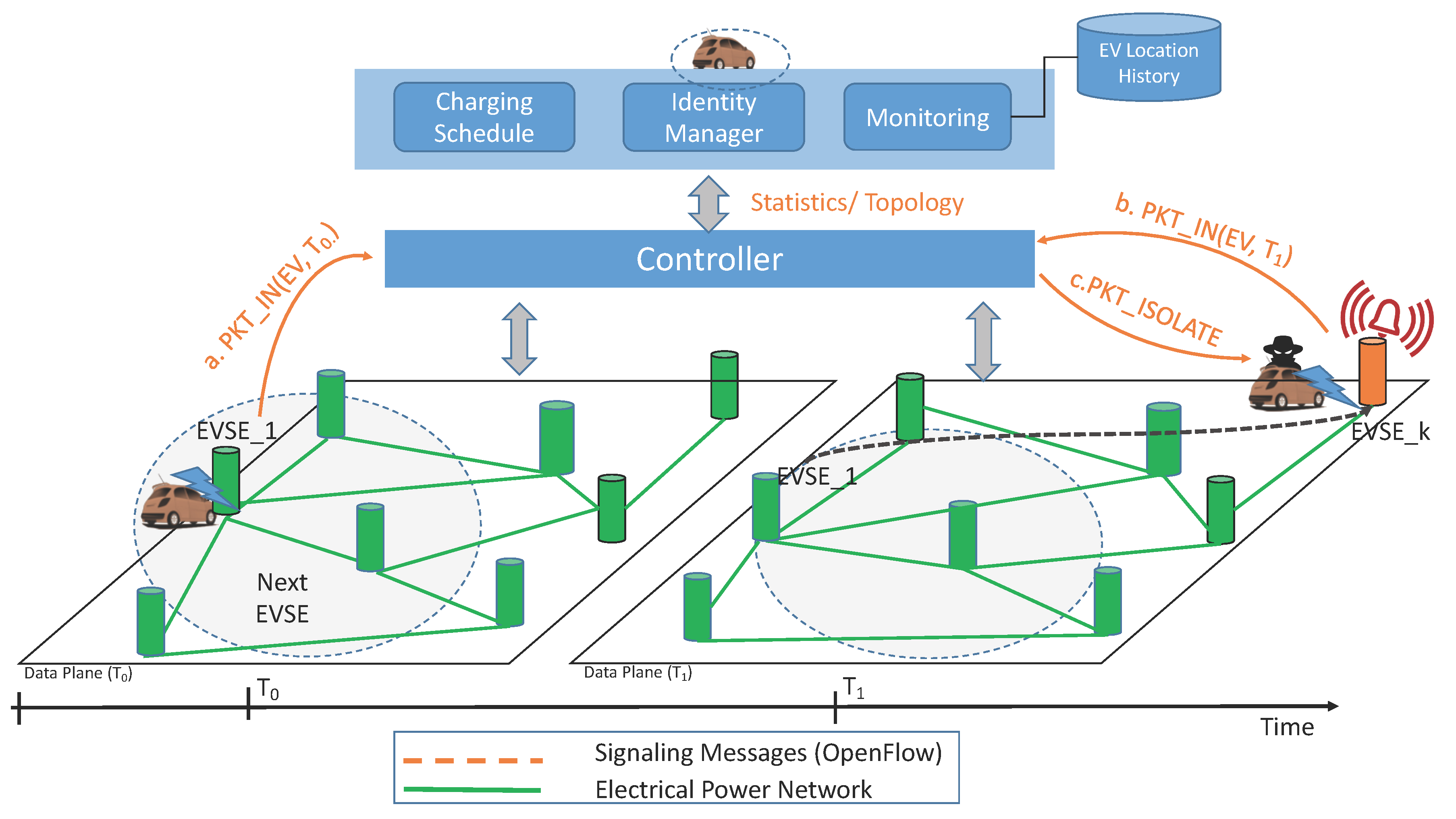
5.2. Smart Grid for Electric Vehicles
5.3. Platooning
5.3.1. Normal Traveling Mode
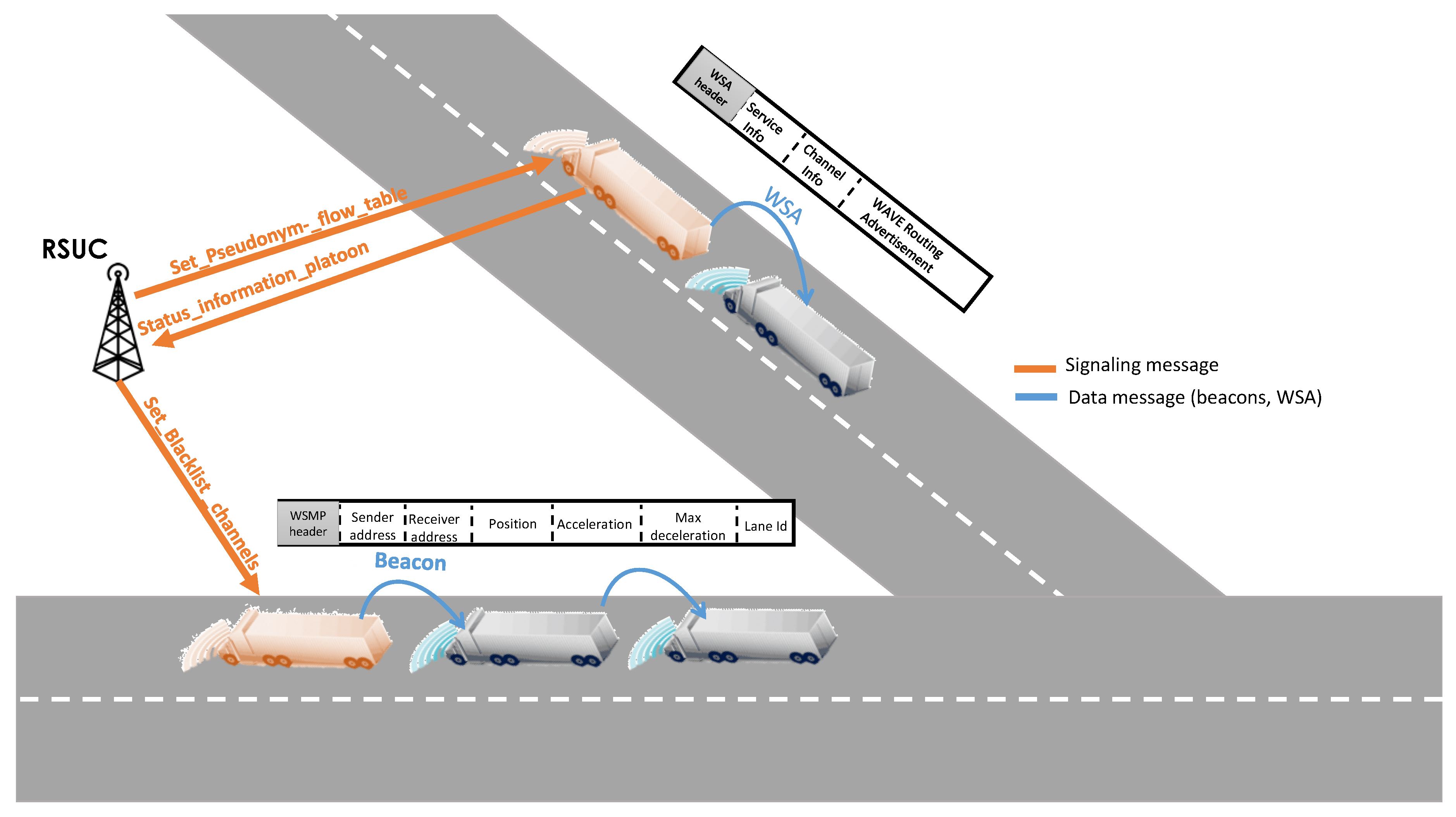
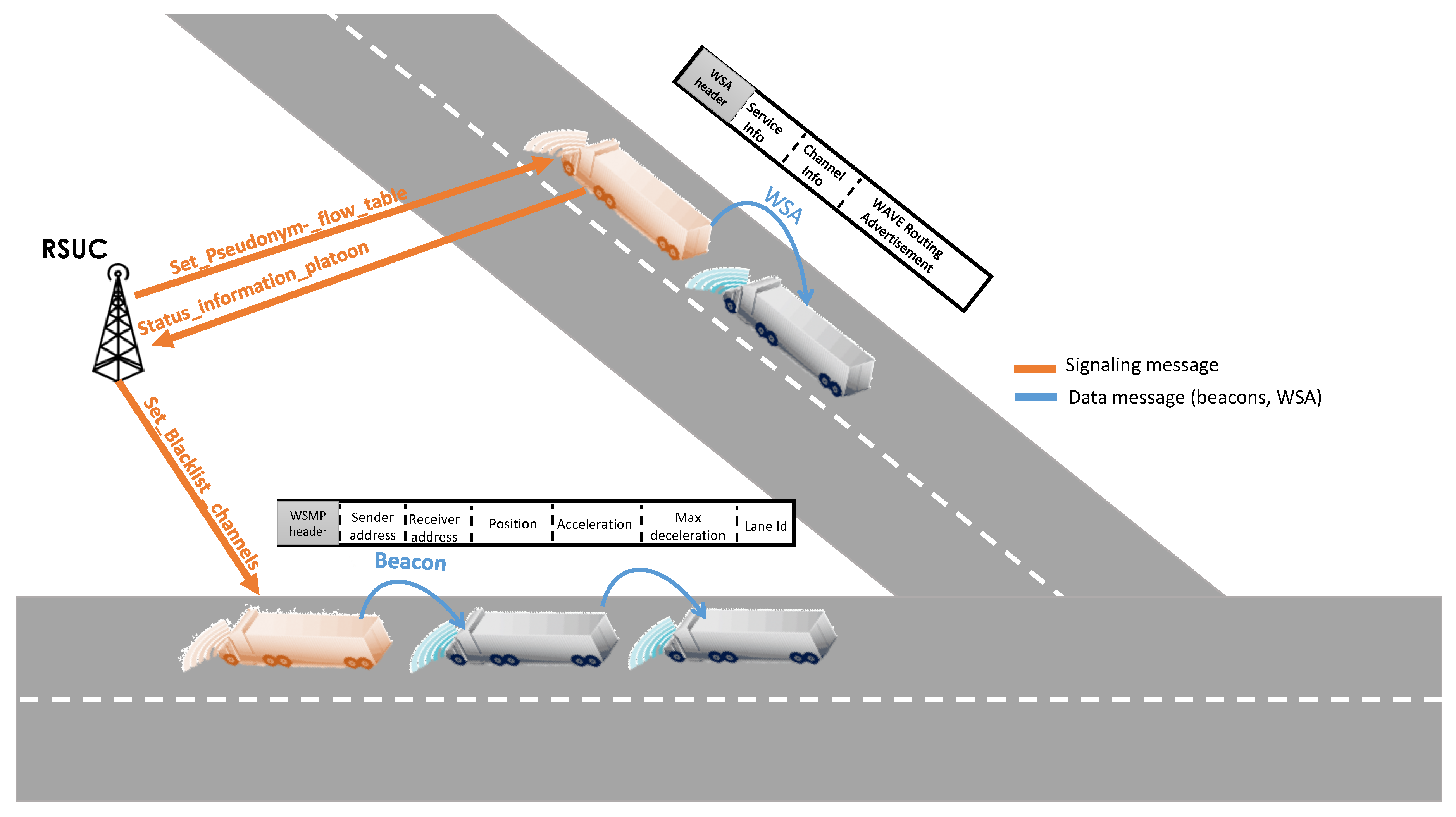
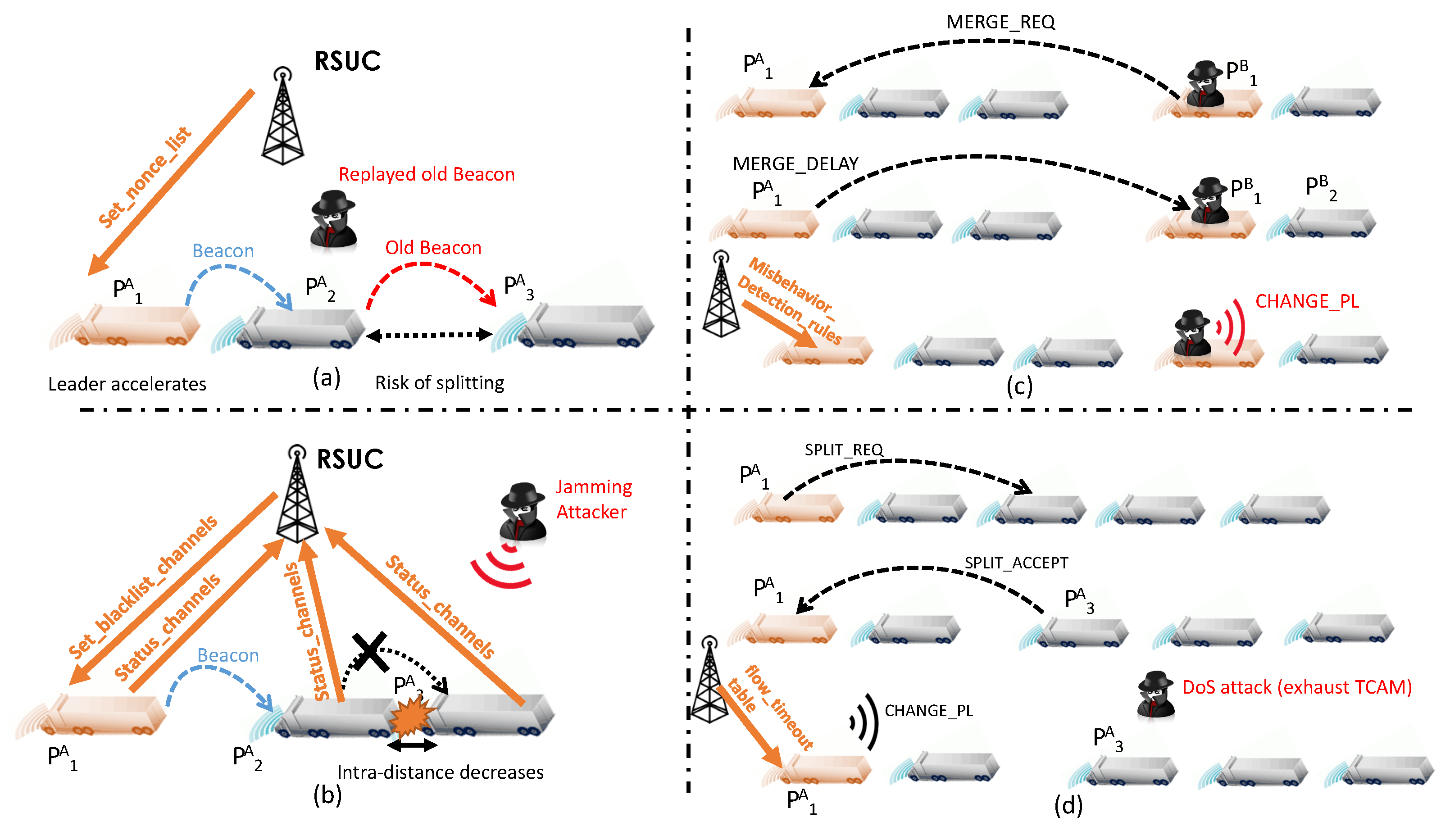
- Replay attack:The malicious user captures and replays a previously generated beacon at a later time or in other parts of the platoon. The replayed beacon includes expired information not relevant to the current situation of the platoon. For example, the platoon leader triggers an acceleration phase and sends a beacon to other followers to make them catch up. The adversary user periodically injects an old beacon with the old acceleration. Vehicles such as assume that the leader is driving at the normal speed and do not accelerate, potentially resulting to platoon splitting. In order to prevent replay attacks on platoons, the SDN paradigm can suggest two options. The first is to use a globally synchronized time for all vehicles. The central controller is a suitable candidate for providing a time reference making it pointless to inject old beacons into the platoon. The second option is based on the use of nonce numbers to uniquely identify each communication, preventing the malicious node from impersonating future communications inside the platoon. As shown in Figure 8a, these nonce values are generated by the RSUC and communicated to the trusted platoon leader via signaling messages (via the command).
- Jamming attack:The attacker can be either a stationary or a moving jammer. Given the nature of the mobility of the platoon, it is rational to have a moving jammer that tracks the considered platoon and causes regular interference. The high level of interference coupled with the continuous aspect of this attacks makes it a thorny problem. As depicted in Figure 8b, the platoon leader broadcasts a beacon on the control channel (CCH), defined by the IEEE 802.11p standard, to instruct vehicles to slow down. re-broadcasts the beacon to the next follower vehicle. The malicious user jams the same channel and disrupts the correct reception of the beacon by and the remaining vehicles. Subsequently, vehicles inside the platoon will keep the same acceleration and hence can cause fatal collisions. SDN can mitigate the adverse consequences of jamming by dynamically selecting the channels on which beacons are sent: the central controller will provide the trusted leader with a channel blacklist that identifies channels the controller regards as “bad” ( command). This list is updated regularly, based on the general overview of the controller. Channels are removed from the blacklist if the badness metric is below a specific threshold. To realize this mode of operation, the RSUC can use the WSA message to announce to leaders the suitable communications channels to use for their further communications with followers. Then, to enable its follower vehicles to learn the blacklisted channels, the leader represents it as a bitmap and embeds it in its beacons. Beacons are then forwarded in the data plane using multi-hop communications. Thus, vehicles are able to re-broadcast beacons avoiding using channels experiencing jamming.
5.3.2. Platoon Management Mode
- Merge maneuver:Merge combines two successive platoons in the same lane to form one single platoon. As shown in Figure 8c, this maneuver is initiated by the the platoon leader of the rear platoon () when the platoon size is less than the predefined target platoon size. One way that , the compromised vehicle, can frustrate this by extracting the platoon id of the leading platoon (via exchanged beacons) and sending a unicast to , which is busy with another maneuver and replies with a unicast message to delay the merging operation. However, instead of waiting for a specific time, the malicious attacker catches up with the front platoon and sends to all its followers to set as a leader. Consequently, the resulting platoon could exceed the predefined target size and followers of could obey to instructions not intended for them. is considered to be as a trusted insider vehicle that has been compromised by malicious software, complicating its detection. A novel SDN-based detection scheme can integrate both data-centric and behavioral mechanisms. The network can be used as a point of observation, which gives the central controller a holistic view of network activity. For instance, the central controller can use data-centric mechanisms to detect that the insider vehicle is transmitting incorrect data. Results are then reinforced using behavioral mechanisms, which check whether this insider node is behaving according to protocol management specifications. In the example in Figure 8c, a correctly-behaving should trigger another after receiving from .
- Splitting maneuver:A split maneuver divides a platoon into two successive ones in the same lane when, for example, platoon size exceeds the predefined maximum size. It can be initiated by a follower in order to become a free vehicle, or by a leader to make a space for a lane change. In Figure 8, the leader initiates the splitting maneuver by sending a unicast request to . Upon reception of a from , sends a multicast message with its forwarding rules to its followers behind to announce the leader change. At this moment, a malicious user can mount a DoS by flooding the network with useless traffic to the vehicles that should receive the , so generating forwarding disruption in the data plane. A large amount of forged or faked traffic sent to vehicles implies that a large number of flow rules must be stored exhausting the TCAM (ternary content-addressable memory) in forwarding vehicles and preventing the installation of the rule for . Consequently, the instruction to change platoon leader is not received by follower vehicles. Meanwhile, reports split completion by sending to so it can slow down. However, vehicles behind are not aware of the leader change and cannot follow the false leader instructions. In SDN-enbaled VANETs, a DoS attack can be mitigated by adjusting flow timeouts, making flow tables less prone to overflows. This adjustment is made by the trusted platoon leader based on information communicated by the Figure () in Figure 8d). Another way of avoiding bogus flows is to establish access control lists. The SDN controller monitors all communication (beacons, WSA messages, etc.) and builds a comprehensive view of the network. The analysis of different messages allows the extraction of topological and forwarding information to build a holistic network graph with traffic flows. Incoming traffic is compared to a set of validated flow rules [43].
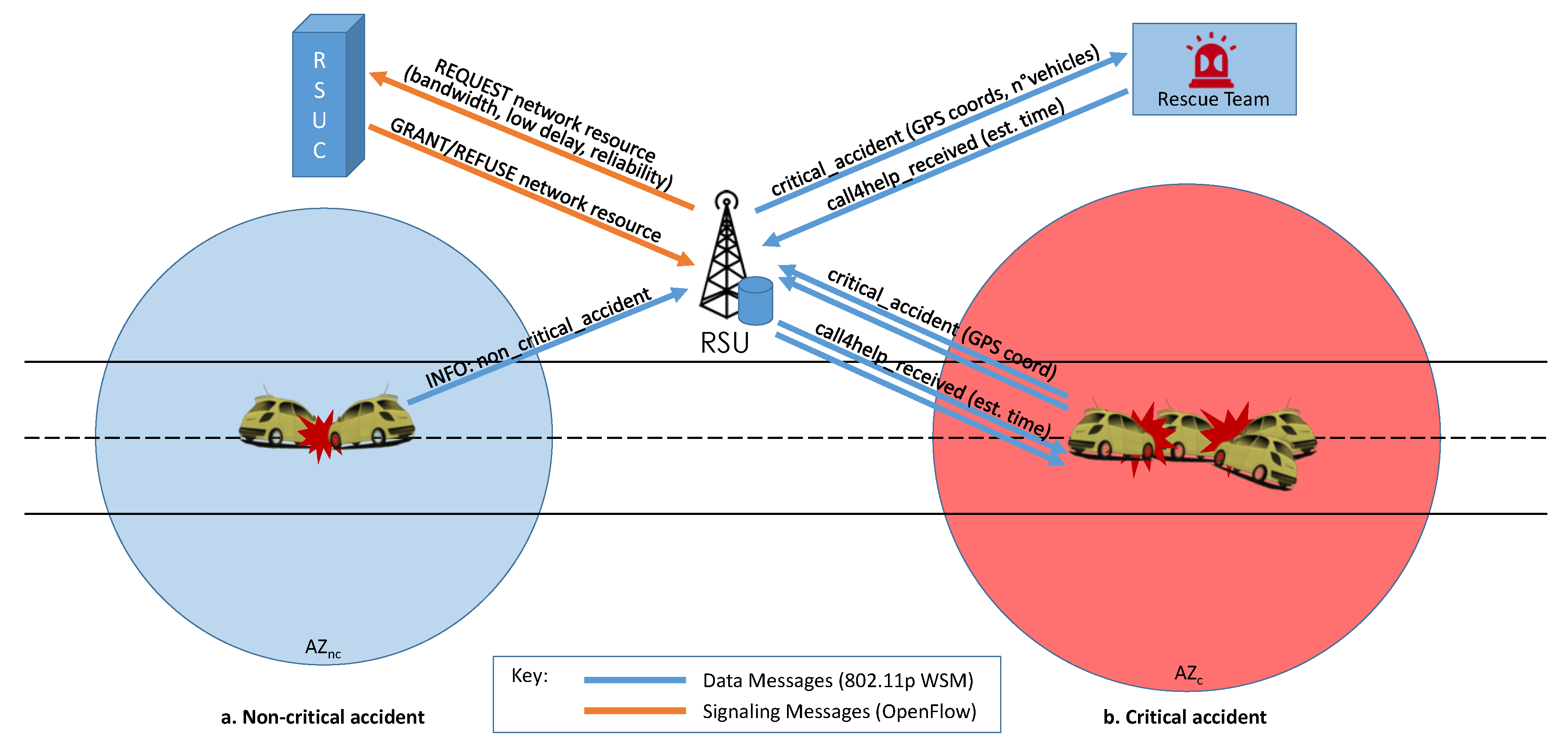
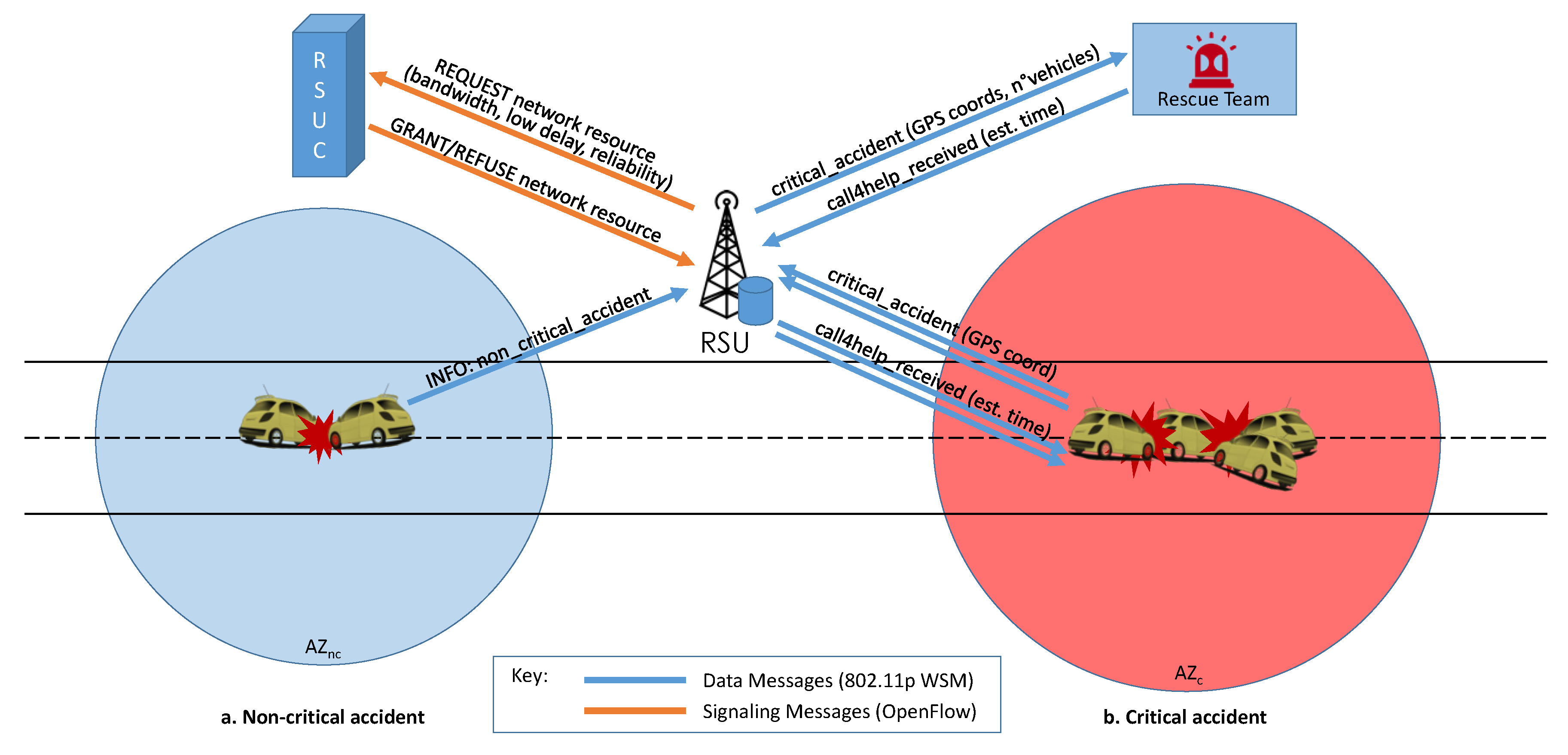
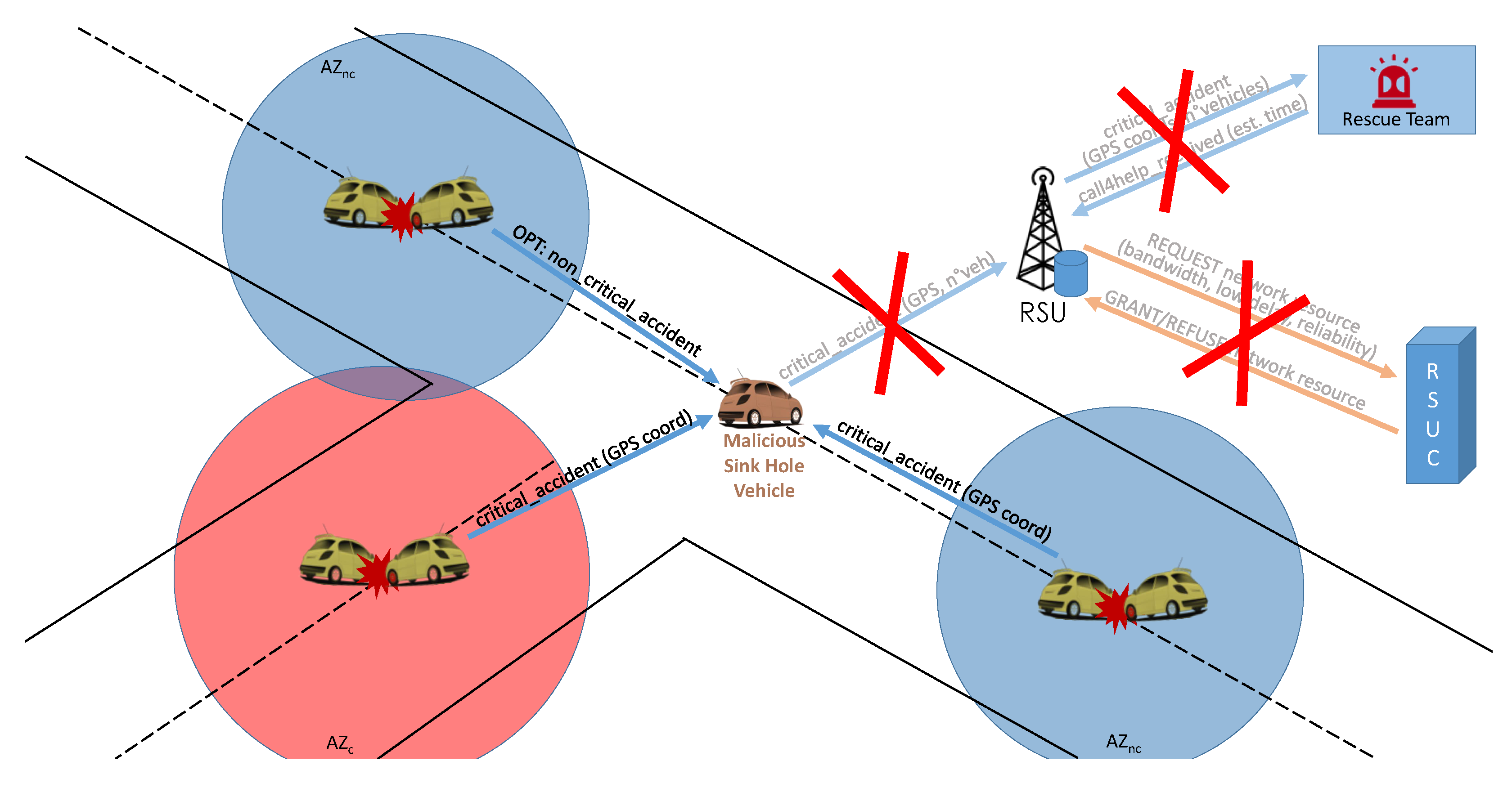
5.4. Emergency Services
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Pike Research. Smart Technologies and Infrastructure for Energy, Water, Mobility, Buildings, and Government: Global Market Analysis and Forecasts. Online Report. 2016. Available online: http://www.navigantresearch.com/research/smart-cities (accessed on 10 August 2016).
- Cunha, F.; Villas, L.; Boukerche, A.; Maia, G.; Viana, A.; Mini, R.A.F.; Loureiro, A.A.F. Data communication in VANETs: Protocols, applications and challenges. Ad Hoc Netw. 2016, 44, 90–103. [Google Scholar] [CrossRef]
- Kreutz, D.; Ramos, F.M.V.; Esteves Verissimo, P.; Esteve Rothenberg, C.; Azodolmolky, S.; Uhlig, S. Software-defined networking: A comprehensive survey. Proc. IEEE 2015, 103, 14–76. [Google Scholar] [CrossRef]
- Ku, I.; Lu, Y.; Gerla, M.; Ongaro, F.; Gomes, R.L.; Cerqueira, E. Towards software-defined VANET: Architecture and services. In Proceedings of the IEEE 2014 13th Annual Mediterranean Ad Hoc Networking Workshop (MED-HOC-NET), Piran, Slovenia, 2–4 June 2014; pp. 103–110.
- Salahuddin, M.A.; Al-Fuqaha, A.; Guizani, M. Software-defined networking for RSU clouds in support of the internet of vehicles. IEEE Internet Things J. 2015, 2, 133–144. [Google Scholar] [CrossRef]
- Truong, N.B.; Lee, G.M.; Ghamri-Doudane, Y. Software defined networking-based vehicular adhoc network with fog computing. In Proceedings of the 2015 IFIP/IEEE International Symposium on Integrated Network Management (IM), Ottawa, ON, Canada, 11–15 May 2015; pp. 1202–1207.
- Wang, W.; Chen, Y.; Zhang, Q.; Jiang, T. A software-defined wireless networking enabled spectrum management architecture. IEEE Commun. Mag. 2016, 54, 33–39. [Google Scholar] [CrossRef]
- Liu, K.; Ng, J.K.Y.; Lee, V.; Son, S.H.; Stojmenovic, I. Cooperative Data Scheduling in Hybrid Vehicular Ad Hoc Networks: VANET as a Software Defined Network. IEEE/ACM Trans. Netw. 2015, 24, 1759–1773. [Google Scholar] [CrossRef]
- Xiao, X.; Kui, X. The characterizes of communication contacts between vehicles and intersections for software-defined vehicular networks. Mob. Netw. Appl. 2015, 20, 98–104. [Google Scholar] [CrossRef]
- Bozkaya, E.; Canberk, B. QoE-based flow management in software defined vehicular networks. In Proceedings of the 2015 IEEE Globecom Workshops (GC Wkshps), San Diego, CA, USA, 6–10 December 2015; pp. 1–6.
- Ahmad, I.; Namal, S.; Ylianttila, M.; Gurtov, A. Security in Software Defined Networks: A Survey. IEEE Commun. Surv. Tutor. 2015, 17, 2317–2346. [Google Scholar] [CrossRef]
- Gheorghe, G.; Avanesov, T.; Palattella, M.R.; Engel, T.; Popoviciu, C. SDN-RADAR: Network troubleshooting combining user experience and SDN capabilities. In Proceedings of the 2015 1st IEEE Conference on Network Softwarization (NetSoft), London, UK, 13–17 April 2015; pp. 1–5.
- Yang, M.; Li, Y.; Jin, D.; Zeng, L.; Wu, X.; Vasilakos, A.V. Software-defined and virtualized future mobile and wireless networks: A survey. Mob. Netw. Appl. 2014, 20, 4–18. [Google Scholar] [CrossRef]
- Soua, R.; Kalogeiton, E.; Manzo, G.; Duarte, J.M.; Palattella, M.R.; Maio, A.D.; Braun, T.; Engel, T.; Villas, L.A.; Rizzo, G.A. SDN coordination for CCN and FC content dissemination in VANETs. In Proceedings of the 8th International Conference on Ad Hoc Networks (ADHOCNETS), Ottawa, ON, Canada, 26–27 September 2016.
- Broadbent, M.; King, D.; Baildon, S.; Georgalas, N.; Race, N. OpenCache: A software-defined content caching platform. In Proceedings of the 2015 1st IEEE Conference on Network Softwarization (NetSoft), London, UK, 13–17 April 2015; pp. 1–5.
- Cao, Y.; Guo, J.; Wu, Y. SDN enabled content distribution in vehicular networks. In Proceedings of the 2014 Fourth International Conference on Innovative Computing Technology (INTECH), Luton, UK, 3–15 August 2014; pp. 164–169.
- Liu, Y.C.; Chen, C.; Chakraborty, S. A Software Defined Network Architecture for GeoBroadcast in VANETs. In Proceedings of the 2015 IEEE International Conference on Communications (ICC), London, UK, 8–12 June 2015; pp. 6559–6564.
- Worldsensing. FasrPrk. Smart Parking System. 2015. Available online: http://www.worldsensing.com (accessed on 25 November 2016).
- Martinez, B.; Vilajosana, X.; Vilajosana, I.; Dohler, M. Lean sensing: Exploiting contextual information for most energy-efficient sensing. IEEE Trans. Ind. Inform. 2015, 11, 1156–1165. [Google Scholar] [CrossRef]
- Palattella, M.R.; Dohler, M.; Grieco, A.; Rizzo, G.; Torsner, J.; Engel, T.; Ladid, L. Internet of things in the 5G era: Enablers, architecture, and business models. IEEE J. Sel. Areas Commun. 2016, 34, 510–527. [Google Scholar] [CrossRef]
- Centenaro, M.; Vangelista, L.; Zanella, A.; Zorzi, M. Long-range communications in unlicensed bands: The rising stars in the IoT and smart city scenarios. IEEE Wirel. Commun. 2015, 23, 60–67. [Google Scholar] [CrossRef]
- Ali, S.; Rizzo, G.; Marsan, M.A.; Mancuso, V. Impact of Mobility on the Performance of Context-Aware Applications Using Floating Content. In Context-Aware Systems and Applications, Proceedings of the Second International Conference (ICCASA 2013), Phu Quoc Island, Vietnam, 25–26 November 2013; Vinh, C.P., Alagar, V., Vassev, E., Khare, A., Eds.; Springer: Cham, Switzerland, 2014; pp. 198–208. [Google Scholar]
- Ali, S.; Rizzo, G.; Mancuso, V.; Marsan, M.A. Persistence and availability of floating content in a campus environment. In Proceedings of the 2015 IEEE Conference on Computer Communications (INFOCOM), Hong Kong, China, 26 April–1 May 2015; pp. 2326–2334.
- Di Maio, A.; Soua, R.; Palattella, M.R.; Engel, T.; Rizzo, G. A centralized approach for setting floating content parameters in VANETs. In Proceedings of the 2017 IEEE Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 8–11 January 2017; Unpublished work.
- Chatzigiannakis, I.; Vitaletti, A.; Pyrgelis, A. A privacy-preserving smart parking system using an IoT elliptic curve based security platform. Comput. Commun. 2016, 89–90, 165–177. [Google Scholar] [CrossRef]
- Mora, C.; Frazier, A.G.; Longman, R.J.; Dacks, R.S.; Walton, M.M.; Tong, E.J.; Sanchez, J.J.; Kaiser, L.R.; Stender, Y.O.; Anderson, J.M.; et al. The projected timing of climate departure from recent variability. Nature 2013, 502, 183–187. [Google Scholar] [CrossRef] [PubMed]
- Jang, Y.J.; Ko, Y.D. System architecture and mathematical model of public transportation system utilizing wireless charging electric vehicles. In Proceedings of the 2012 15th International IEEE Conference on Intelligent Transportation Systems, Anchorage, AK, USA, 16–19 September 2012; pp. 1055–1060.
- Lam, A.Y.S.; Leung, Y.W.; Chu, X. Electric vehicle charging station placement: Formulation, complexity, and solutions. IEEE Trans. Smart Grid 2014, 5, 2846–2856. [Google Scholar] [CrossRef]
- Wang, X.; Yuen, C.; Hassan, N.U.; An, N.; Wu, W. Electric vehicle charging station placement for urban public bus systems. IEEE Trans. Intell. Transp. Syst. 2016, PP, 1–12. [Google Scholar] [CrossRef]
- Shuai, W.; Maille, P.; Pelov, A. Charging electric vehicles in the smart city: A survey of economy-driven approaches. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2089–2106. [Google Scholar] [CrossRef]
- Naik, M.B.; Ranjan, A.; Gunawat, V.; Kumar, P.; Majhi, S. A brilliant public transportation system linked with electric vehicles in coordination with the grid. In Proceedings of the 2014 Annual IEEE India Conference (INDICON), Pune, India, 11–13 December 2014; pp. 1–6.
- Mousavian, S.; Erol-kantarci, M.; Ortmeyer, T. Cyber Attack Protection for a Resilient Electric Vehicle Infrastructure. In Proceedings of the 2015 IEEE GLOBECOM Workshops, San Diego, CA, USA, 6–10 December 2015.
- Webstore International Electrotechnical Commission. IEC 61851-1:2010. Electric Vehicle Conductive Charging System—Part 1: General Requirements. Available online: https://webstore.iec.ch/publication/6029 (accessed on 25 November 2016).
- Al-Anbagi, I.; Mouftah, H.T. WAVE 4 V2G: Wireless access in vehicular environments for vehicle-to-grid applications. Veh. Commun. 2016, 3, 31–42. [Google Scholar] [CrossRef]
- Jia, D.; Lu, K.; Wang, J.; Zhang, X.; Shen, X. A survey on platoon-based vehicular cyber-physical systems. IEEE Commun. Surv. Tutor. 2016, 18, 263–284. [Google Scholar] [CrossRef]
- Mc Goldrick, C.; Rabsatt, V.; Gerla, M. Independent active ageing-the role of 5G and autonomous vehicles. E-Letter 2015, 10, 4. [Google Scholar]
- Hyytiä, E.; Virtamo, J.; Lassila, P.; Kangasharju, J.; Ott, J. When does content float? Characterizing availability of anchored information in opportunistic content sharing. In Proceedings of the 2011 Proceedings IEEE INFOCOM, Shanghai, China, 10–15 April 2011; pp. 3137–3145.
- Engoulou, R.G.; Bellache, M.; Pierre, S.; Quintero, A. VANET security surveys. Comput. Commun. 2014, 44, 1–13. [Google Scholar] [CrossRef]
- Qu, F.; Wu, Z.; Wang, F.Y.; Cho, W. A security and privacy review of VANETs. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2985–2996. [Google Scholar] [CrossRef]
- Mejri, M.N.; Ben-Othman, J.; Hamdi, M. Survey on VANET security challenges and possible cryptographic solutions. Veh. Commun. 2014, 1, 53–66. [Google Scholar] [CrossRef]
- Azees, M.; Vijayakumar, P.; Deborah, L.J. Comprehensive survey on security services in vehicular ad-hoc networks. IET Intell. Transp. Syst. 2016, 10, 379–388. [Google Scholar] [CrossRef]
- Mokhtar, B.; Azab, M. Survey on security issues in vehicular ad hoc networks. Alex. Eng. J. 2015, 54, 1115–1126. [Google Scholar] [CrossRef]
- Akhunzada, A.; Ahmed, E.; Gani, A.; Khan, M.K.; Imran, M.; Guizani, S. Securing software defined networks: Taxonomy, requirements, and open issues. IEEE Commun. Mag. 2015, 53, 36–44. [Google Scholar] [CrossRef]
- Scott-Hayward, S.; O’Callaghan, G.; Sezer, S. SDN security: A survey. In Proceedings of the 2013 IEEE SDN for Future Networks and Services (SDN4FNS), Trento, Italy, 11–13 November 2013; pp. 1–7.
- Liyanage, M.; Abro, A.B.; Ylianttila, M.; Gurtov, A. Opportunities and challenges of software-defined mobile networks in network security. IEEE Secur. Priv. 2016, 14, 34–44. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Y.; Wang, Y.; Gu, X. RPRep: A robust and privacy-preserving reputation management scheme for pseudonym-enabled VANETs. Int. J. Distrib. Sens. Netw. 2016, 2016, 1–15. [Google Scholar] [CrossRef]
- Hu, H.; Lu, R.; Zhang, Z.; Shao, J. REPLACE: A reliable trust-based platoon service recommendation scheme in VANET. IEEE Trans. Veh. Technol. 2016, PP, 99. [Google Scholar] [CrossRef]
- Amoozadeh, M.; Raghuramu, A.; Chuah, C.; Ghosal, D.; Zhang, H.M.; Rowe, J.; Levitt, K. Security vulnerabilities of connected vehicle streams and their impact on cooperative driving. IEEE Commun. Mag. 2015, 53, 126–132. [Google Scholar] [CrossRef]
- Amoozadeh, M.; Deng, H.; Chuah, C.N.; Zhang, H.M.; Ghosal, D. Platoon management with cooperative adaptive cruise control enabled by VANET. Veh. Commun. 2015, 2, 110–123. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R.W. Overview of consensus algorithms in cooperative control. In Distributed Consensus in Multi-vehicle Cooperative Control: Theory and Applications; Springer: London, UK, 2008; pp. 3–22. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attack | Description | Security Req. | Affected Layer | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| A | B | C | D | E | 1 | 2 | 3 | 4 | 5 | ||
| Brute Force | The attacker tries all the possible key combinations to access a restricted entity or decrypt a piece of information | √ | √ | √ | |||||||
| GPS Spoofing | The attacker broadcasts a forged GPS signal that overtops the legitimate one, so that vehicles get wrong position data | √ | √ | √ | |||||||
| Illusion Attack | The attacker spreads incorrect information on road conditions, influencing the route of nearby vehicles | √ | √ | √ | |||||||
| Bogus Information Attack | Like Illusion Attacks, but here the attacker sends fictitious messages about road conditions for its personal benefit | √ | √ | √ | |||||||
| DoS Attack | A huge amount of useless traffic is sent to the victim, to hamper its responsiveness to legitimate user requests | √ | √ | √ | √ | ||||||
| DDos Attack | As DoS, but the attacker controls a set of so-called zombie nodes that perform the attack in a distributed fashion | √ | √ | √ | √ | ||||||
| Jamming | A strong interference signal spoils the wireless traffic, so that no communication can happen on a specific channel | √ | √ | √ | |||||||
| Malware Attack | An attacker inject the VANET with a malicious piece of software that replicates itself via V2V communications | √ | √ | √ | √ | ||||||
| Masquerade Attack | The attacker steals the trusted identity of a reputable node and sends (possibly modified) messages on its behalf | √ | √ | √ | √ | √ | √ | ||||
| Replay Attack | The attacker sniffs a message that it reuses as is, for authenticated access to a restricted network realm | √ | √ | √ | |||||||
| Repudiation | The attacker denies being the sender of a message, causing retransmissions and therefore congestion | √ | √ | √ | |||||||
| Sink Hole Attack | The attacker vehicle instructs a VANET portion to route all traffic to it, acting like a malicious gateway | √ | √ | √ | √ | √ | √ | ||||
| Snooping | The attacker eavesdrops the network traffic at a certain layer without modifying it, in order to extract information | √ | √ | √ | √ | √ | √ | ||||
| Man-in-the-Middle | Adds to the Snooping Attack the possibility of altering the message content and sending it to the original recipient | √ | √ | √ | √ | √ | √ | √ | √ | √ | |
| Spamming | Many messages are sent through the VANET to vehicles that are not interested in their content, typically ads | √ | √ | ||||||||
| Sybil Attack | The attacker creates multiple fictitious identities to gain reputation and power in a trust management scheme | √ | √ | ||||||||
| Timing Attack | The reliability of the infrastructure is compromised by delaying the forwarding of time-critical messages | √ | √ | √ | |||||||
| SDN Features | Security | |
|---|---|---|
| Advantages | Threats | |
| Centralized Controller | Avoid conflicts among security policies | Single point of failure |
| Abstraction and Programmability | Support for diverse security policies | Open to software vulnerabilities |
| Flow-based Forwarding | Isolate and label suspicious flows | Flow-poisoning attack |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Di Maio, A.; Palattella, M.R.; Soua, R.; Lamorte, L.; Vilajosana, X.; Alonso-Zarate, J.; Engel, T. Enabling SDN in VANETs: What is the Impact on Security? Sensors 2016, 16, 2077. https://doi.org/10.3390/s16122077
Di Maio A, Palattella MR, Soua R, Lamorte L, Vilajosana X, Alonso-Zarate J, Engel T. Enabling SDN in VANETs: What is the Impact on Security? Sensors. 2016; 16(12):2077. https://doi.org/10.3390/s16122077
Chicago/Turabian StyleDi Maio, Antonio, Maria Rita Palattella, Ridha Soua, Luca Lamorte, Xavier Vilajosana, Jesus Alonso-Zarate, and Thomas Engel. 2016. "Enabling SDN in VANETs: What is the Impact on Security?" Sensors 16, no. 12: 2077. https://doi.org/10.3390/s16122077
APA StyleDi Maio, A., Palattella, M. R., Soua, R., Lamorte, L., Vilajosana, X., Alonso-Zarate, J., & Engel, T. (2016). Enabling SDN in VANETs: What is the Impact on Security? Sensors, 16(12), 2077. https://doi.org/10.3390/s16122077