
A Touch Sensing Technique Using the Effects of Extremely Low Frequency Fields on the Human Body

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Operation Principle
2.1. Effects of External Electric Fields on the Human Body
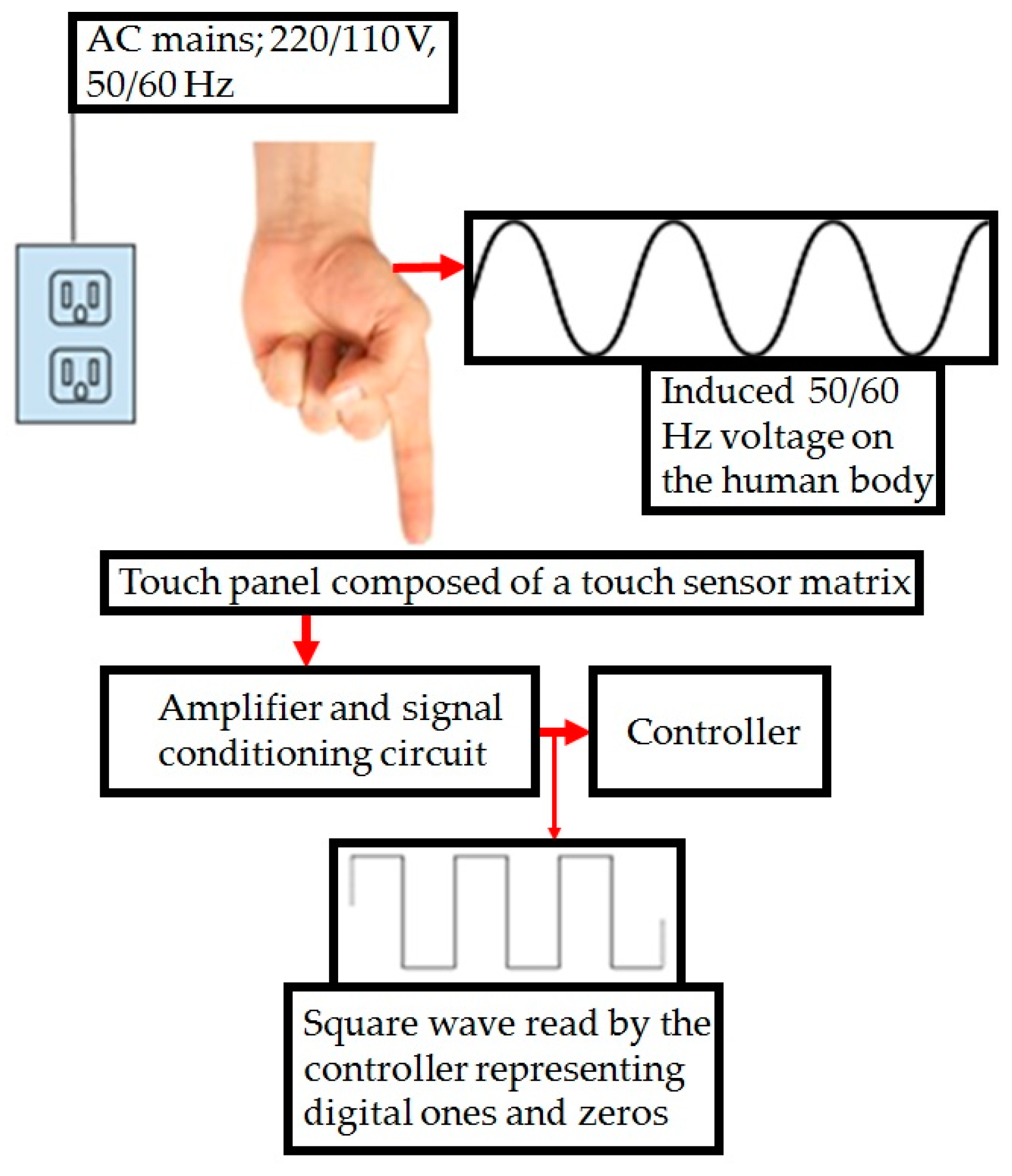
2.2. AC Hum Touch Signal Acquisition and Processing
3. Design and Implementation of a Keyboard Based on the Proposed Touch Sensing Technique
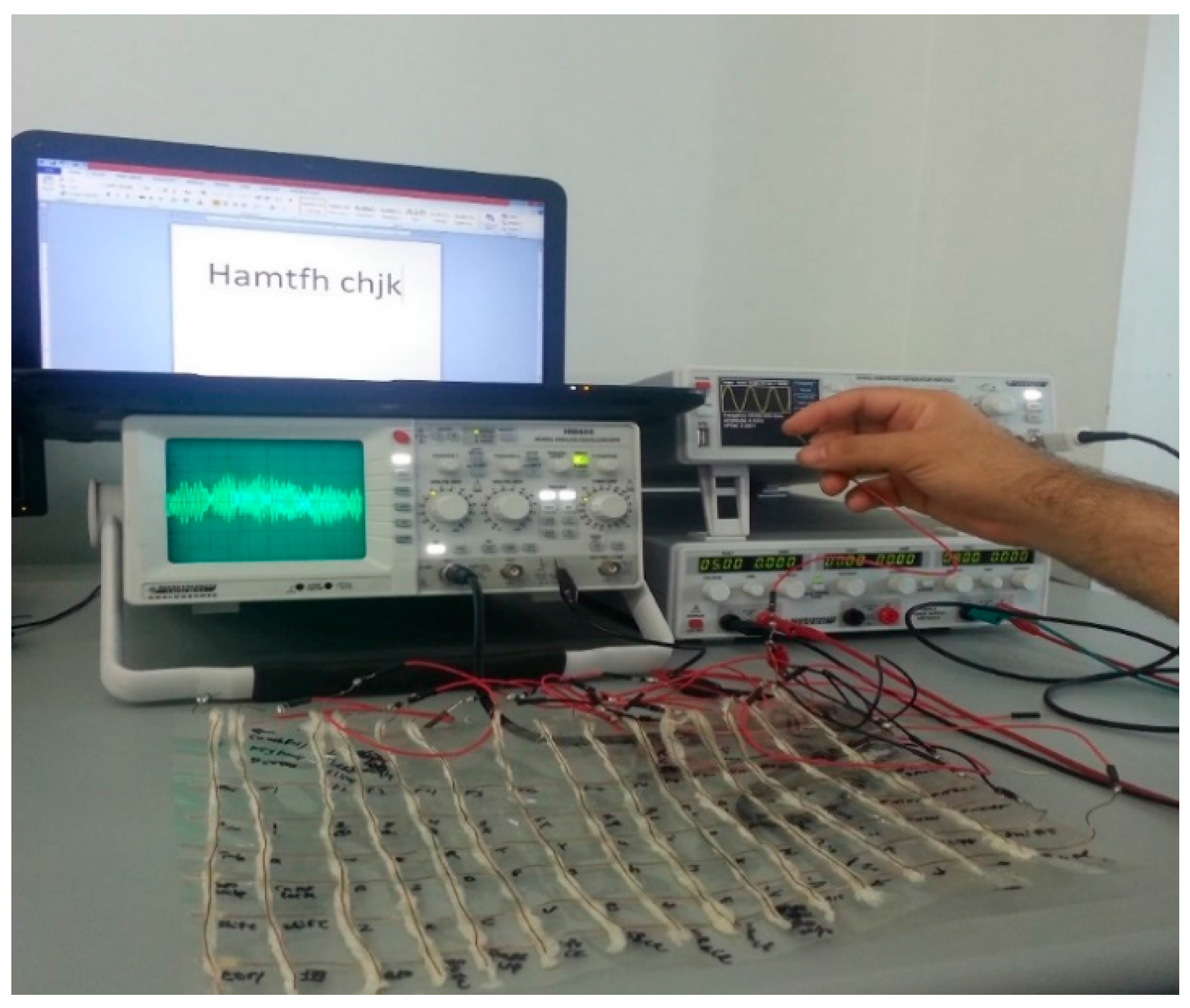
4. Testing the Keyboard
5. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| ELF | Extremely low frequency |
| LED | Light emitting diode |
| USB | Universal serial bus |
References
- Lee, B.; Hong, I.; Uhm, Y.; Park, S. The multi-touch system with high applicability using tri-axial coordinate infrared LEDs. IEEE Trans. Consum. Electron. 2009, 55, 2416–2424. [Google Scholar] [CrossRef]
- Lim, S.-C.; Shin, J.; Kim, S.-C.; Park, J. Expansion of smart watch touch interface from touchscreen to around device interface using infrared line image sensors. Sensors 2015, 15, 16642–16653. [Google Scholar] [CrossRef] [PubMed]
- Han, J.H.; Lee, K.-H.; Han, W.H. A Conclusive Role of Ordinary Transmission for an effective FTIR Touch Screen. In Proceedings of the IEEE International Conference on Industrial Technology, Busan, Korea, 26 February–1 March 2014; pp. 583–588.
- Kim, Y.; Park, S.; Park, S.K.; Yun, S.; Kyung, K.-U.; Sun, K. Transparent and flexible force sensor array based on optical waveguide. Opt. Express 2012, 20, 14486–14493. [Google Scholar] [CrossRef] [PubMed]
- Shikida, M.; Asano, K. A flexible transparent touch panel based on ionic liquid channel. IEEE Sens. J. 2013, 13, 3490–3495. [Google Scholar] [CrossRef]
- Kamali, B. Touch-screen Displays. In Instrument Engineers’ Handbook—Process Control and Optimization, 4th ed.; Lipták, B.G., Ed.; CRC Press: Boca Raton, FL, USA, 2006; pp. 845–853. [Google Scholar]
- Nakamura, T.; Yamamoto, A. Interaction force estimation on a built-in position sensor for an electrostatic visuo-haptic display. ROBOMECH J. 2016, 3, 1–11. [Google Scholar] [CrossRef]
- Kim, W.; Oh, H.; Kwak, Y.; Park, K.; Ju, B.-K.; Kim, K. Development of a carbon nanotube-based touchscreen capable of multi-touch and multi-force sensing. Sensors 2015, 15, 28732–28741. [Google Scholar] [CrossRef] [PubMed]
- Wang, B.; Long, J.; Teo, K.H. Multi-channel capacitive sensor arrays. Sensors 2016, 16, 150. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.-L.; Liang, W.-Y.; Chiang, C.-Y.; Hsieh, T.-J.; Lee, D.-C.; Yuan, S.-M.; Chang, Y.-L. Vision-based finger detection, tracking, and event identification techniques for multi-touch sensing and display systems. Sensors 2011, 11, 6868–6892. [Google Scholar] [CrossRef] [PubMed]
- Reis, S.; Correia, V.; Martins, M.; Barbosa, G.; Sousa, R.M.; Minas, G.; Lanceros-Mendez, S.; Rocha, J.G. Touchscreen Based on Acoustic Pulse Recognition with Piezoelectric Polymer Sensors. In Proceedings of the IEEE International Symposium on Industrial Electronics, Bari, Italy, 4–7 July 2010.
- Katsuki, T.; Nakazawa, F.; Sano, S.; Takahashi, Y.; Satoh, Y. A compact and High Optical Transmission SAW Touch Screen with ZnO Thin-Film Piezoelectric Transducers. In Proceedings of the 2003 IEEE Symposium on Ultrasonics, Honolulu, HI, USA, 5–8 October 2003; pp. 821–824.
- Liu, Y.; Nikolovski, J.P.; Mechbal, N.; Hafez, M.; Vergé, M. An acoustic multi-touch sensing method using amplitude disturbed ultrasonic wave diffraction patterns. Sens. Actuators A Phys. 2010, 162, 394–399. [Google Scholar] [CrossRef]
- Kurita, K.; Fujii, Y.; Shimada, K. A new technique for touch sensing based on measurement of current generated by electrostatic induction. Sens. Actuators A Phys. 2011, 170, 66–71. [Google Scholar] [CrossRef]
- Shinoda, H.; Chigusa, H.; Makino, Y. Flexible tactile sensor skin using wireless sensor elements coupled with 2D microwaves. J. Robot. Mechatron. 2010, 22, 784–789. [Google Scholar]
- Dahiya, R.S.; Adami, A.; Collini, C.; Lorenzelli, L. POSFET tactile sensing arrays using CMOS technology. Sens. Actuators A Phys. 2012, 47, 894–897. [Google Scholar] [CrossRef]
- Walker, G. A review of technologies for sensing contact location on the surface of a display. J. Soc. Inf. Disp. 2012, 20, 413–440. [Google Scholar] [CrossRef]
- Tsuji, S.; Kohama, T. A layered 3D touch screen using capacitance measurement. IEEE Sens. J. 2014, 14, 3040–3045. [Google Scholar] [CrossRef]
- Hashimoto, K.; Nakamoto, T. Tiny olfactory display using surface acoustic wave device and micropumps for wearable applications. IEEE Sens. J. 2016, 16, 4974–4980. [Google Scholar] [CrossRef]
- Sample, A.P.; Yeager, D.J.; Smith, J.R. A capacitive Touch Interface for Passive RFID. In Proceedings of the IEEE International Conference on RFID, Orlando, FL, USA, 27–28 April 2009; pp. 103–109.
- Andò, B.; Baglio, S.; Marletta, V.; Pistorio, A. A contactless Inkjet Printed Passive Touch Sensor. In Proceedings of the IEEE International Instrumentation and Measurement Technology Conference, Montevideo, Uruguay, 12–15 May 2014; pp. 1638–1642.
- Sarwar, M.; Dobashi, Y.; Glitz, E.; Farajollahi, M.; Mirabbasi, S.; Naficy, S.; Spinks, G.M.; Madden, J.D. Transparent and Conformal ‘Piezoionic’ Touch Sensor. In Proceedings of the Electroactive Polymer Actuators and Devices, San Diego, CA, USA, 9–12 March 2015.
- Rendl, C.; Greindl, P.; Haller, M.; Zirkl, M.; Stadlober, B.; Hartmann, P. PyzoFlex: Printed Piezoelectric Pressure Sensing Foil. In Proceedings of the 25th Annual ACM Symposium on User Interface Software and Technology, Cambridge, MA, USA, 7–10 October 2012; pp. 509–518.
- Cohn, G.; Morris, D.; Patel, S.N.; Tan, D. Humantenna: Using the Body as an Antenna for Real-Time Whole-Body Interaction. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Austin, TX, USA, 5–10 May 2012; pp. 1901–1910.
- Cohn, G.; Morris, D.; Patel, S.N.; Tan, D. Your Noise is My Command: Sensing Gestures Using the Body as an Antenna. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Vancouver, BC, Canada, 7–12 May 2011; pp. 791–800.
- Cohn, G.; Gupta, S.; Lee, T.-J.; Morris, D.; Smith, J.R.; Reynolds, M.S.; Tan, D.S.; Patel, S.N. An Ultra-Low-Power Human Body Motion Sensor Using Static Electric Field Sensing. In Proceedings of the ACM Conference on Ubiquitous Computing, Pittsburgh, PA, USA, 5–8 September 2012; pp. 99–102.
- Elfekey, H.M.; Bastawrous, H.A. Design and Implementation of a New Thin Cost Effective AC Hum Based Touch Sensing Keyboard. In Proceedings of the IEEE International Conference on Consumer Electronics, Las Vegas, NV, USA, 11–14 January 2013; pp. 602–605.
- Elfekey, H.M.; Bary, E.M.A.; Bastawrous, H.A. Flexible ITO-Free Touch Panel Based on The Effects of Extremely Low Frequency Electromagnetic Fields. In Proceedings of the IEEE International Symposium on Consumer Electronics, Madrid, Spain, 24–26 June 2015; pp. 1–2.
- Wang, T.-Y.; Liu, L.-H.; Peng, S.-Y. A power-efficient highly linear reconfigurable biopotential sensing amplifier using gate-balanced pseudoresistors. IEEE Trans. Circuits Syst. II 2015, 62, 199–203. [Google Scholar] [CrossRef]
- Ma, C.-T.; Mak, P.-I.; Vai, M.-I.; Mak, P.-U.; Pun, S.-H.; Feng, W.; Martins, R.P. Frequency-bandwidth-tunable powerline notch filter for biopotential acquisition systems. IEEE Electron. Lett. 2009, 45, 197–199. [Google Scholar] [CrossRef]
- Hoang, L.H.; Scorretti, R.; Burais, N.; Voyer, D. Numerical dosimetry of induced phenomena in the human body by a three-phase power line. IEEE Trans. Magn. 2009, 45, 1666–1669. [Google Scholar] [CrossRef]
- Scorretti, R.; Burais, N.; Fabregue, O.; Nicolas, A.; Nicolas, L. Computation of the induced current density into the human body due to relative LF magnetic field generated by realistic devices. IEEE Trans. Magn. 2004, 40, 643–646. [Google Scholar] [CrossRef]
- Peratta, C.; Peratta, A. Modelling the Human Body Exposure to ELF Electric Fields; WIT Press: Billerica, UK, 2010. [Google Scholar]
- Nikandish, G.; Medi, A. Design and analysis of broadband Darlington amplifiers with bandwidth enhancement in GaAs pHEMT Technology. IEEE Trans. Microw. Theory 2014, 62, 1705–1715. [Google Scholar] [CrossRef]
- Atmel, 8-bit Microcontroller with 16/32 Bytes of ISP Flash and USB Controller, ATmega16U4 Datasheet, November, 2014. Available online: http://www.atmel.com/images/doc7593.pdf (accessed on 15 May 2016).
- Lourenço, A.; Silva, H.; Santos, D.P.; Fred, A. Towards a Finger Based ECG Biometric System. In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing, Rome, Italy, 26–29 January 2011.
- Elfekey, H.M.; Maximous, G.S.; Bastawrous, H.A. 3D Human Proximity Sensor Based on the AC Hum Effect. In Proceedings of IEEE 5th Global Conference on Consumer Electronics, Kyoto, Japan, 11–14 October 2016; pp. 610–611.
- Elfekey, H.M.; Bastawrous, H.A. Granite-based touch-sensing floor for machinery safety and exergaming. In Proceedings of the IEEE 4th Global Conference on Consumer Electronics, Osaka, Japan, 27–30 October 2015; pp. 593–594.
- Elfekey, H.M.; Okamoto, S. Turning surfaces into touch panels: A Granite touch panel. Unpublished work. 2016. [Google Scholar]
- Shin, H.; Ko, S.; Jang, H.; Yun, I.; Lee, K. A 55 dB SNR with 240 Hz frame scan rate mutual capacitor 30 × 24 touch-screen panel read-out IC using code-division multiple sensing technique. In Proceedings of the IEEE International Solid-State Circuits Conference Digest of Technical Papers, San Francisco, CA, USA, 17–21 February 2013; pp. 388–389.


© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elfekey, H.; Bastawrous, H.A.; Okamoto, S. A Touch Sensing Technique Using the Effects of Extremely Low Frequency Fields on the Human Body. Sensors 2016, 16, 2049. https://doi.org/10.3390/s16122049
Elfekey H, Bastawrous HA, Okamoto S. A Touch Sensing Technique Using the Effects of Extremely Low Frequency Fields on the Human Body. Sensors. 2016; 16(12):2049. https://doi.org/10.3390/s16122049
Chicago/Turabian StyleElfekey, Hatem, Hany Ayad Bastawrous, and Shogo Okamoto. 2016. "A Touch Sensing Technique Using the Effects of Extremely Low Frequency Fields on the Human Body" Sensors 16, no. 12: 2049. https://doi.org/10.3390/s16122049
APA StyleElfekey, H., Bastawrous, H. A., & Okamoto, S. (2016). A Touch Sensing Technique Using the Effects of Extremely Low Frequency Fields on the Human Body. Sensors, 16(12), 2049. https://doi.org/10.3390/s16122049