
Localization Based on Magnetic Markers for an All-Wheel Steering Vehicle

Abstract
:1. Introduction
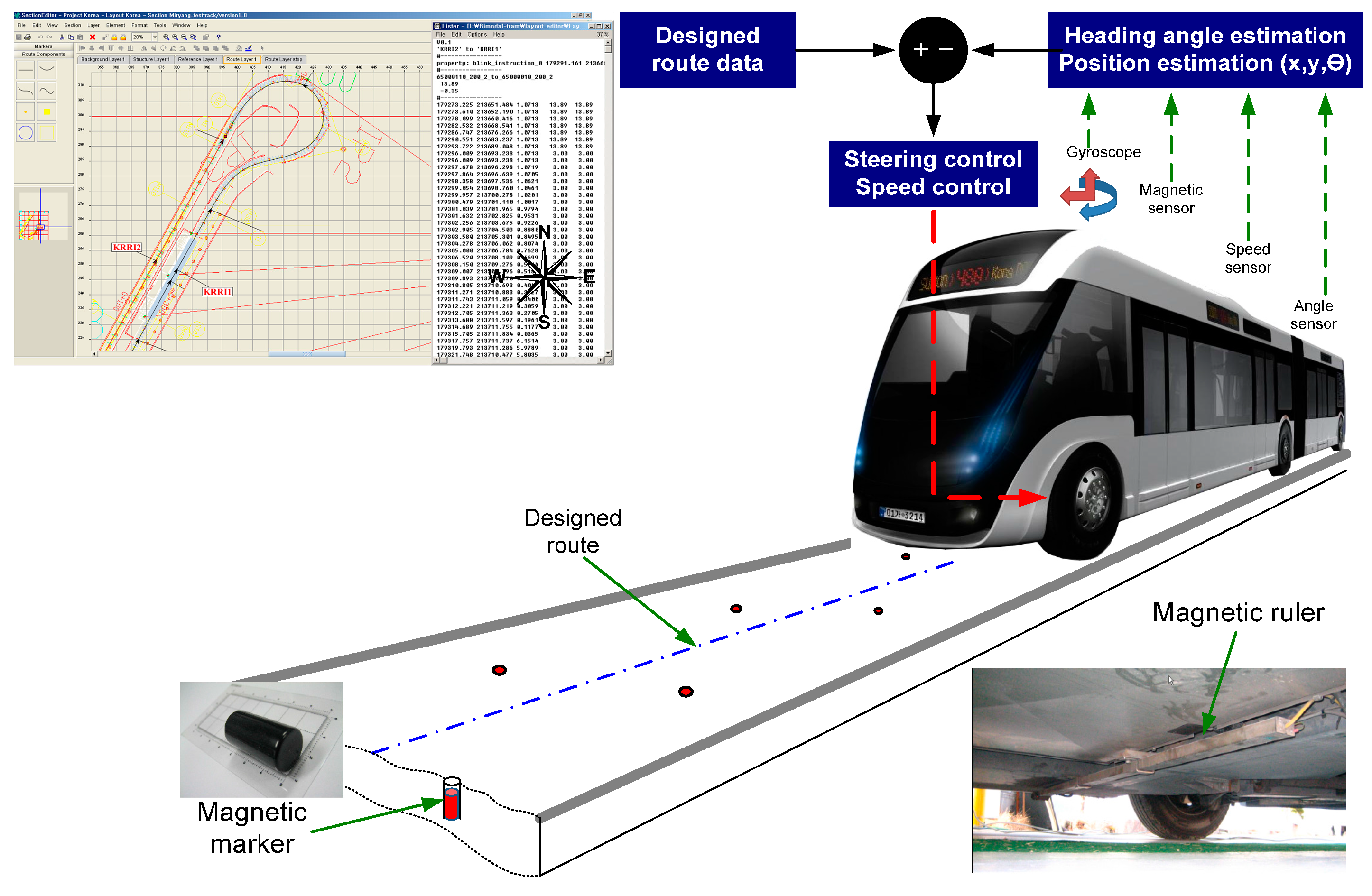
2. Magnetic Markers-Based Positioning System
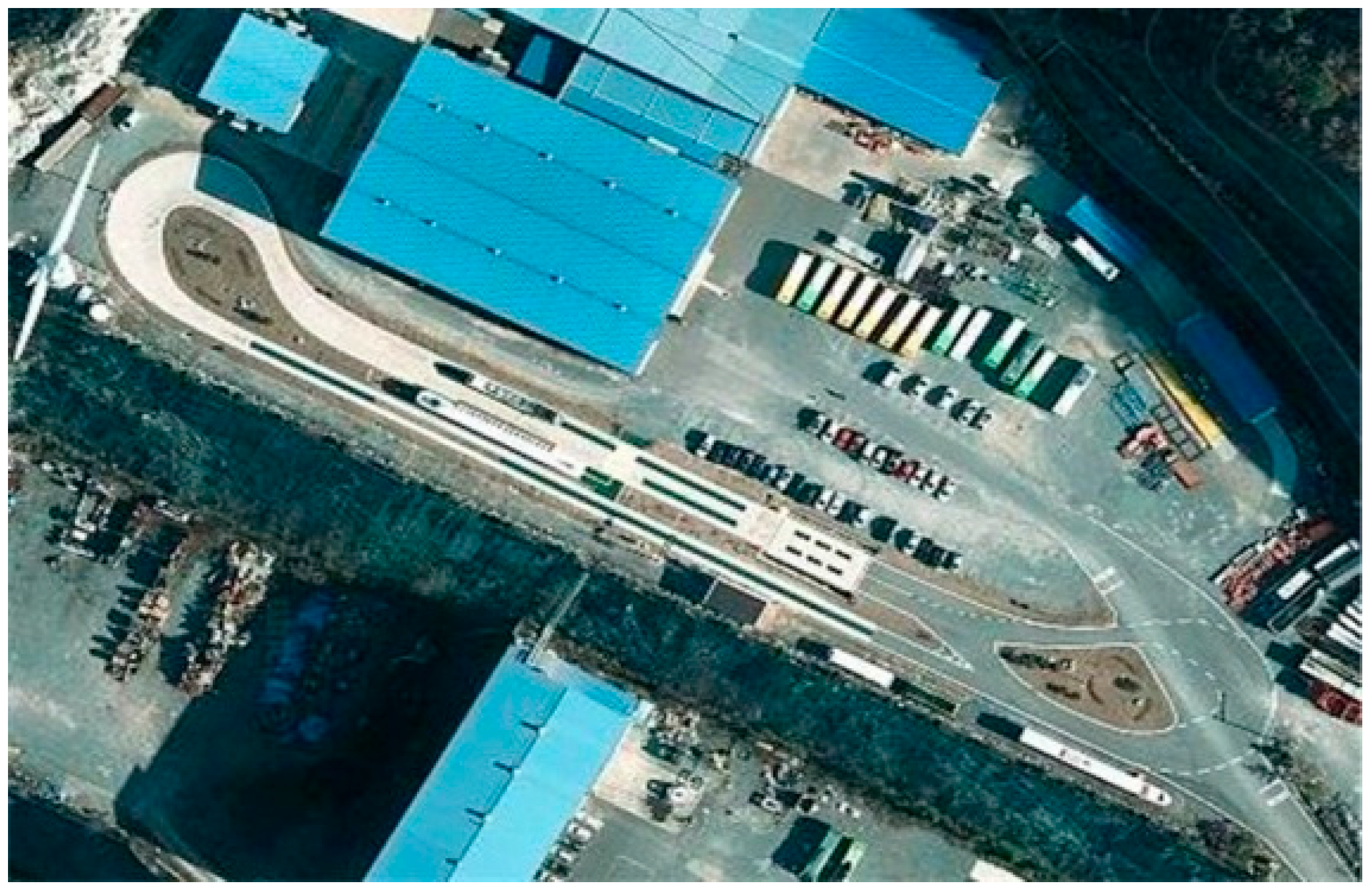
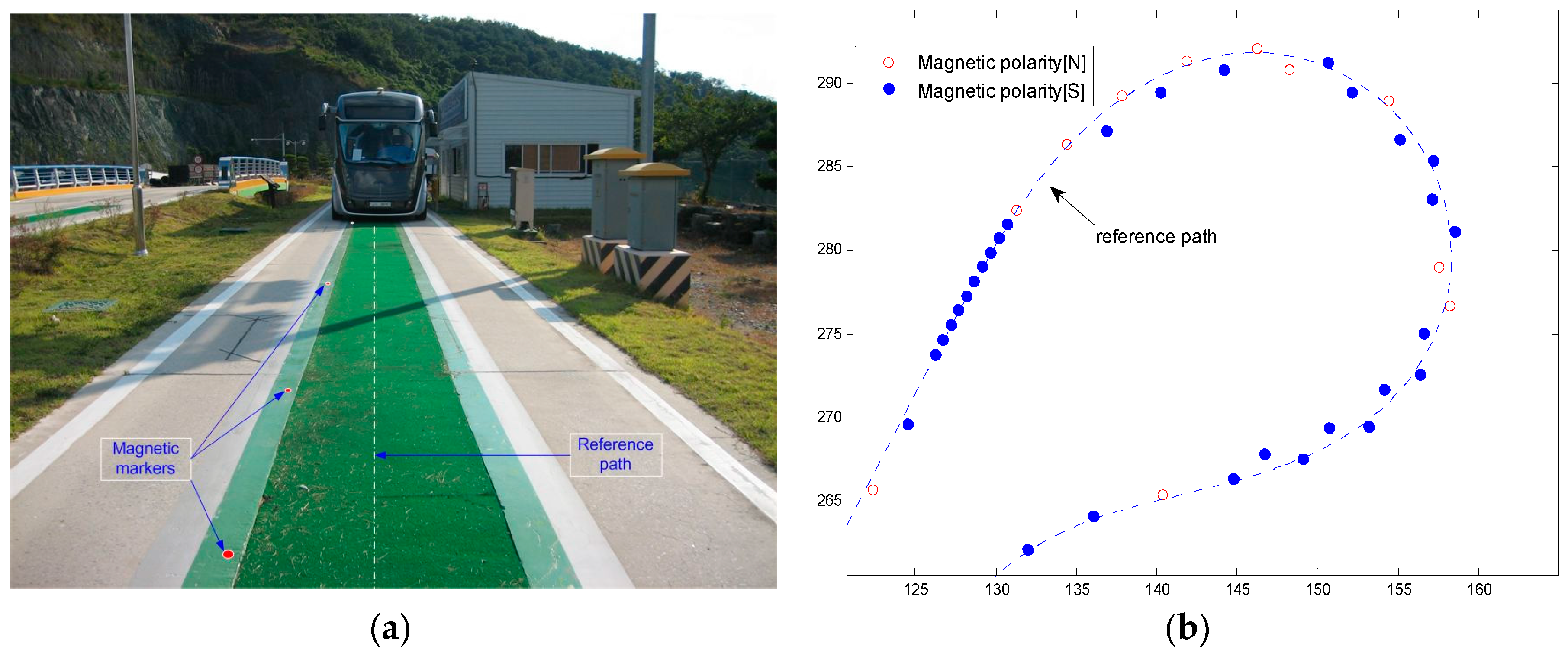
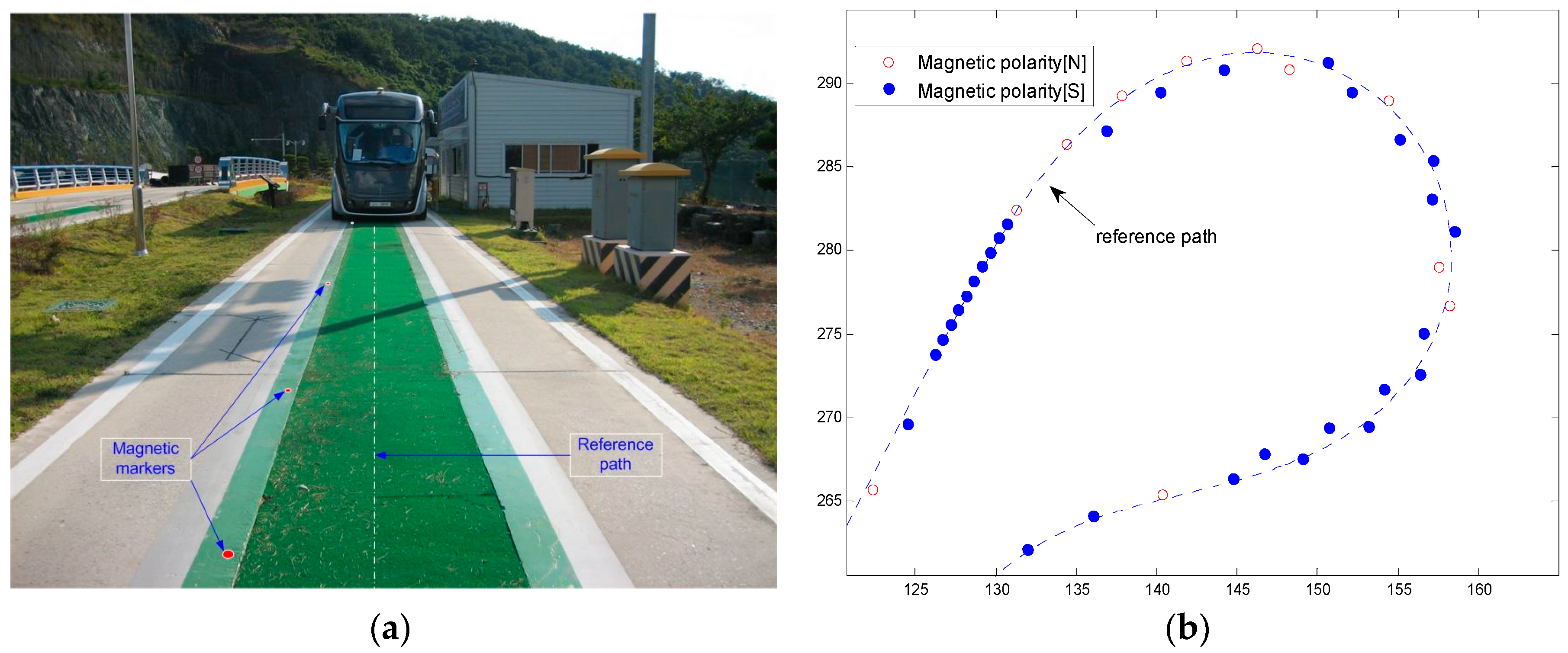
2.1. Test Route
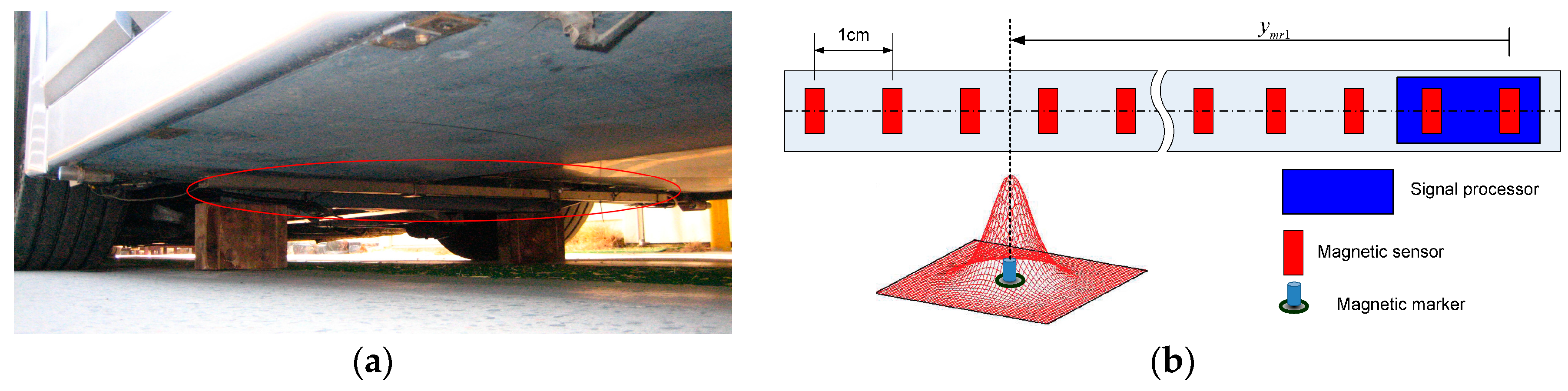
2.2. Magnet Measurement System
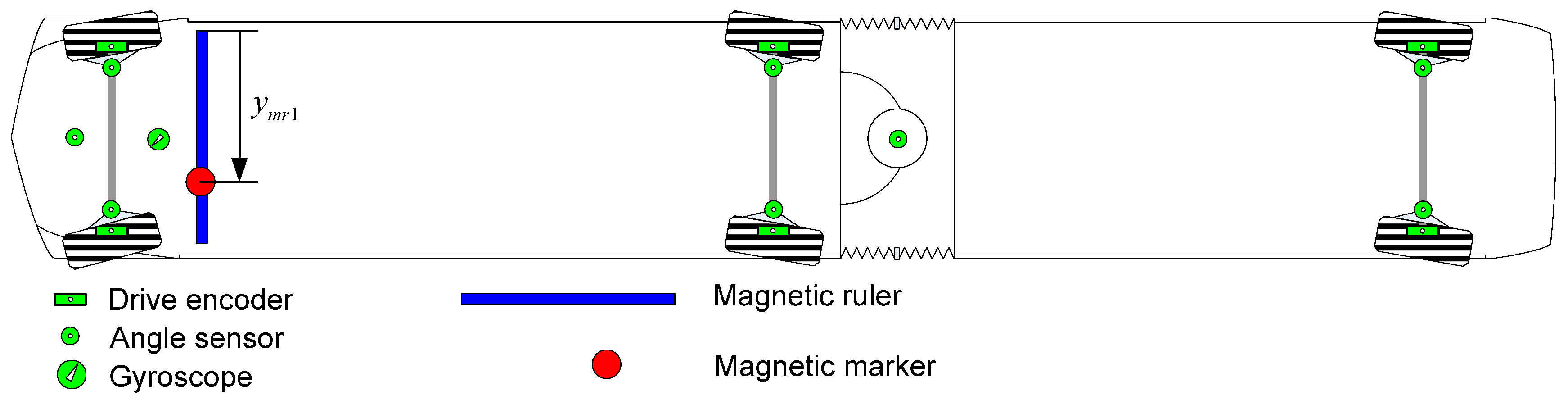
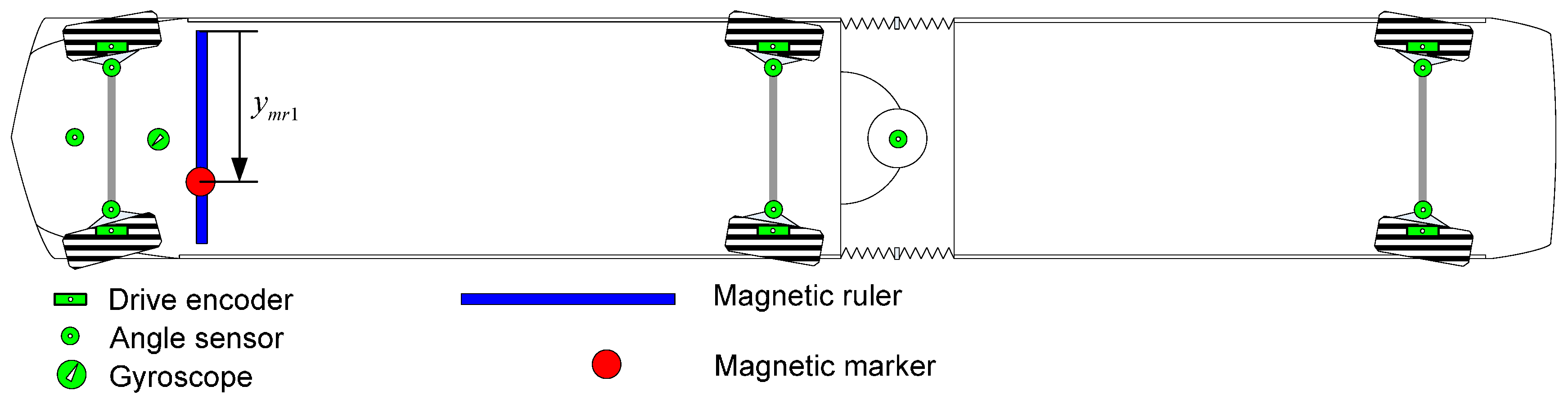
2.3. Vehicle Measurement System
3. Magnetic Marker-Based Position and Heading Estimation
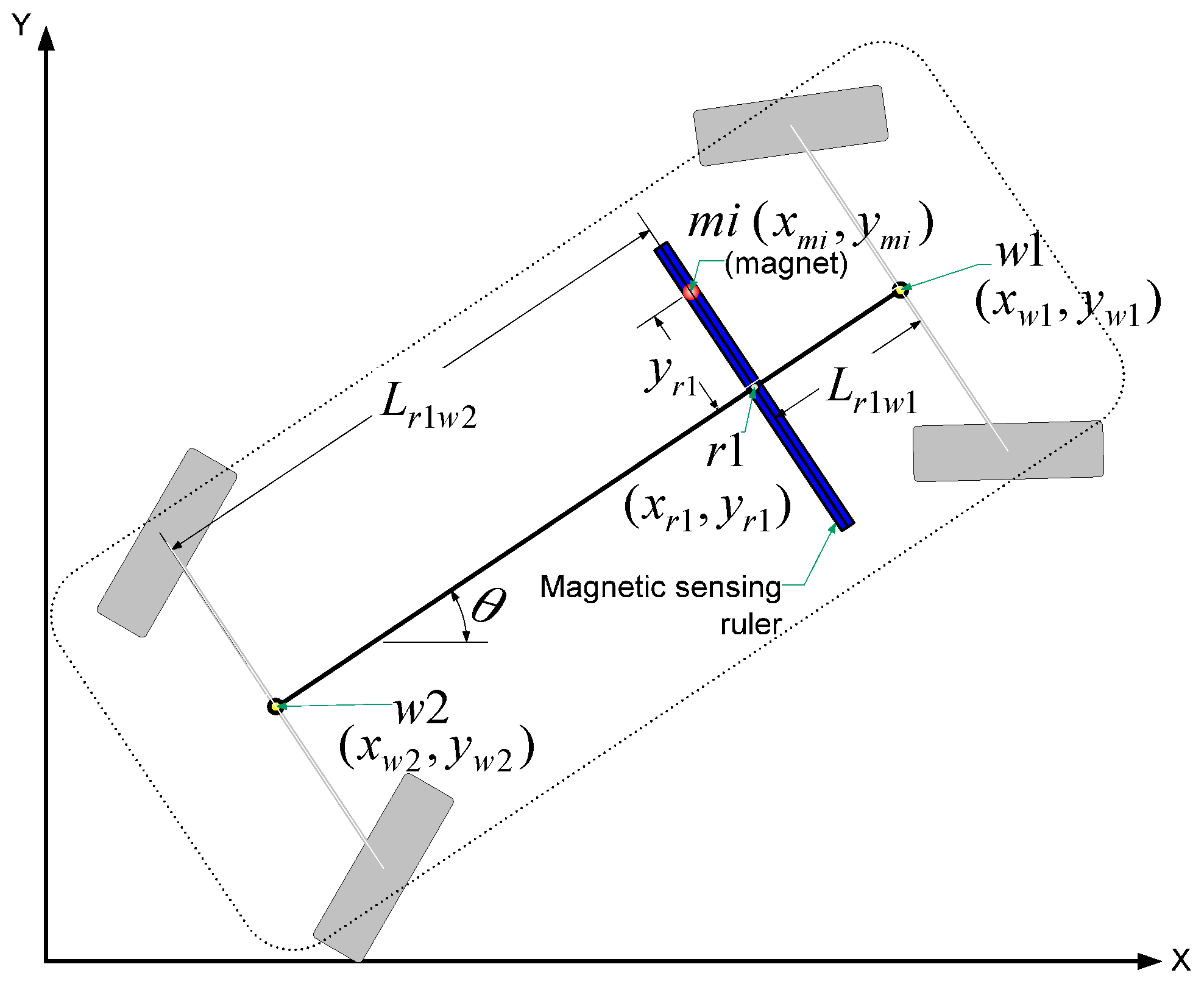
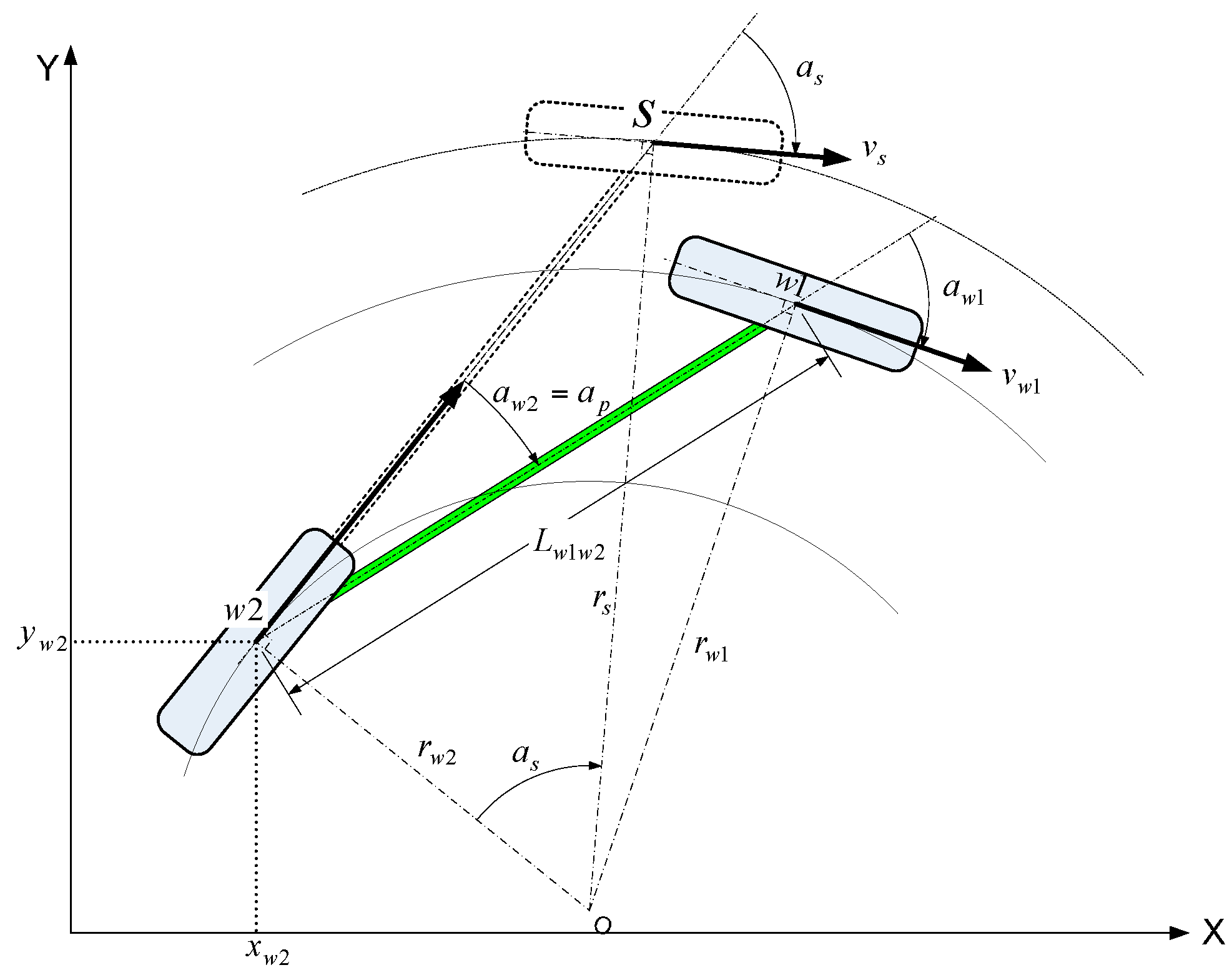
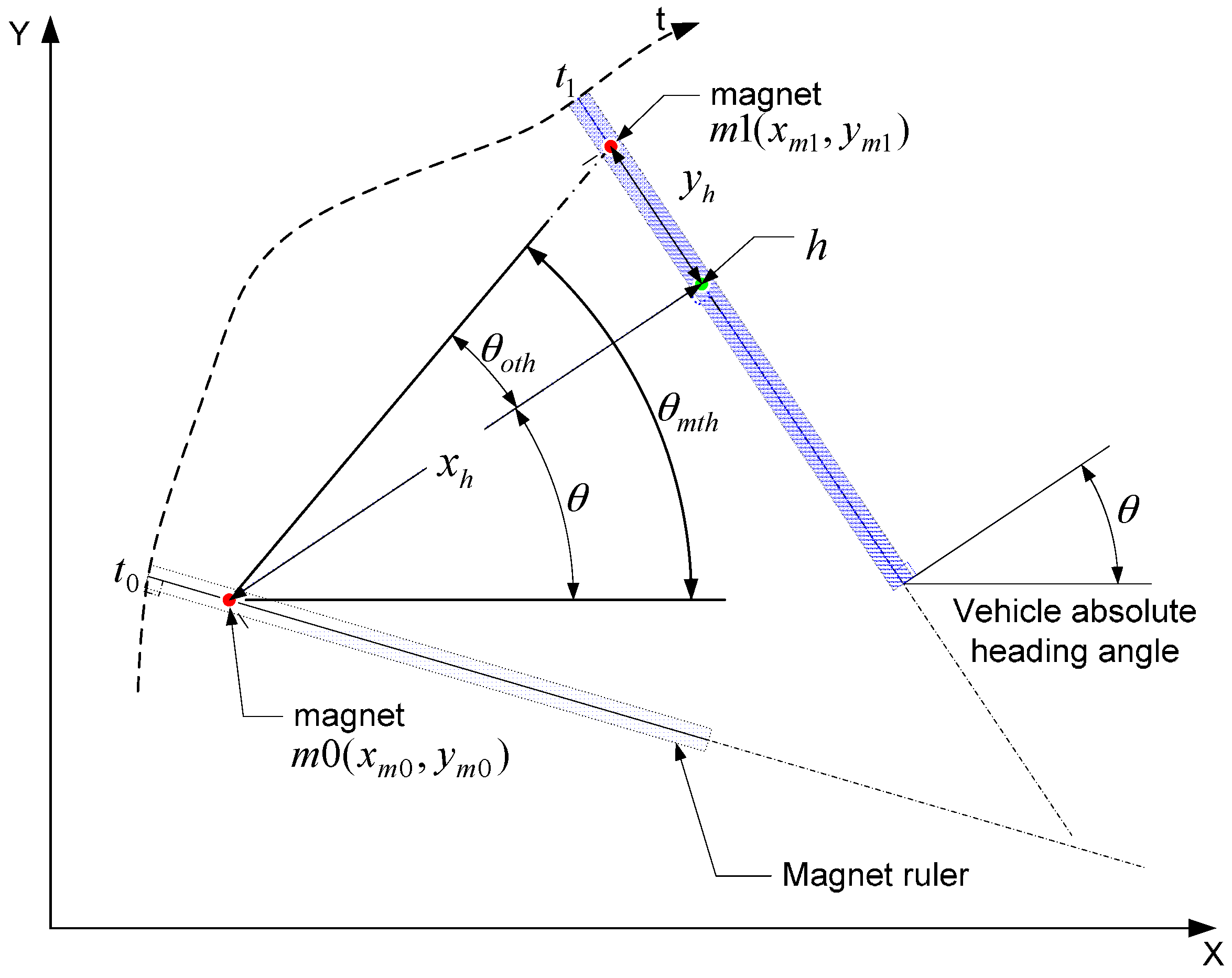
3.1. Heading Estimation
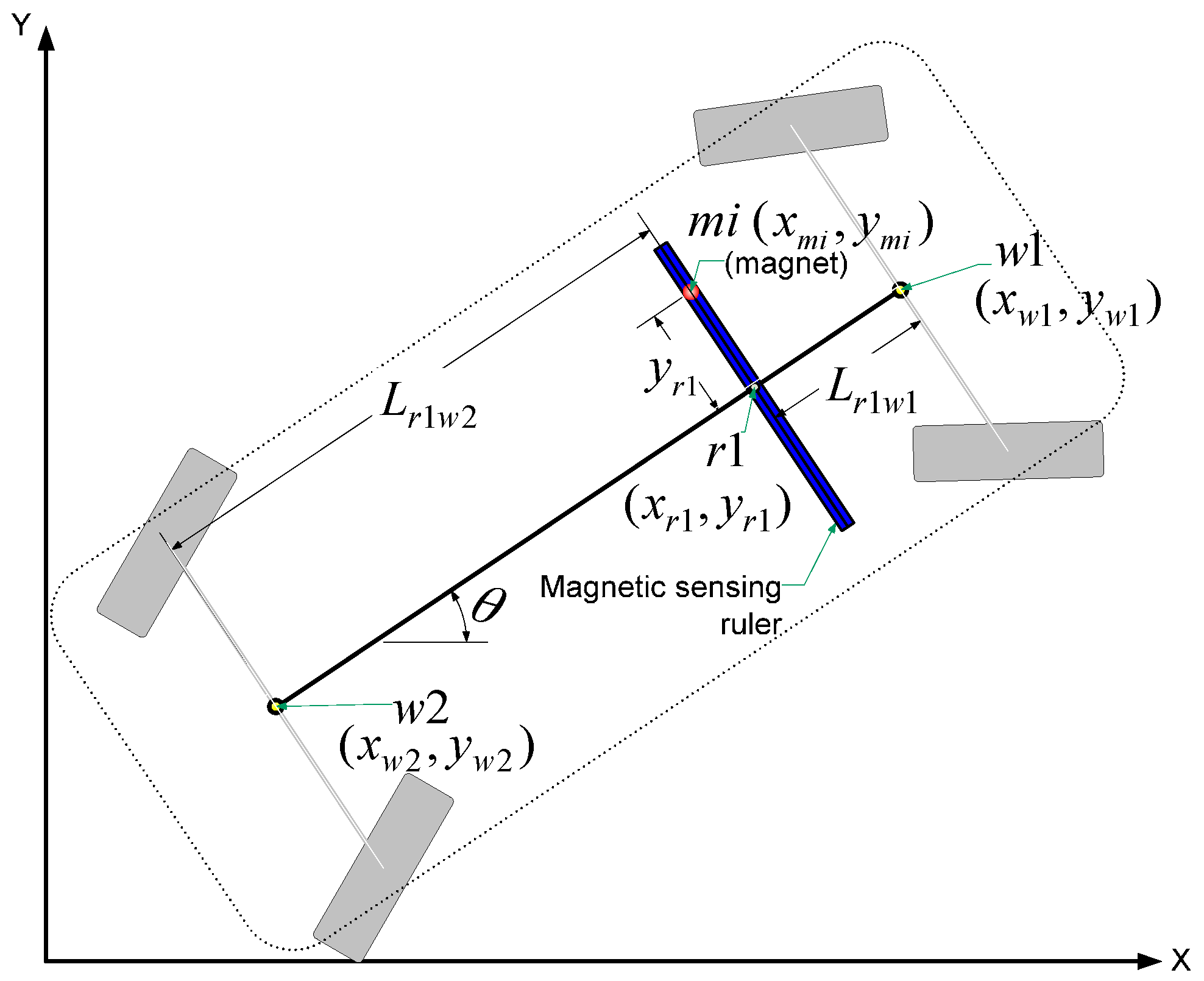
3.2. Position Estimation
3.2.1. Magnetic Marker Identification and Position Initialization
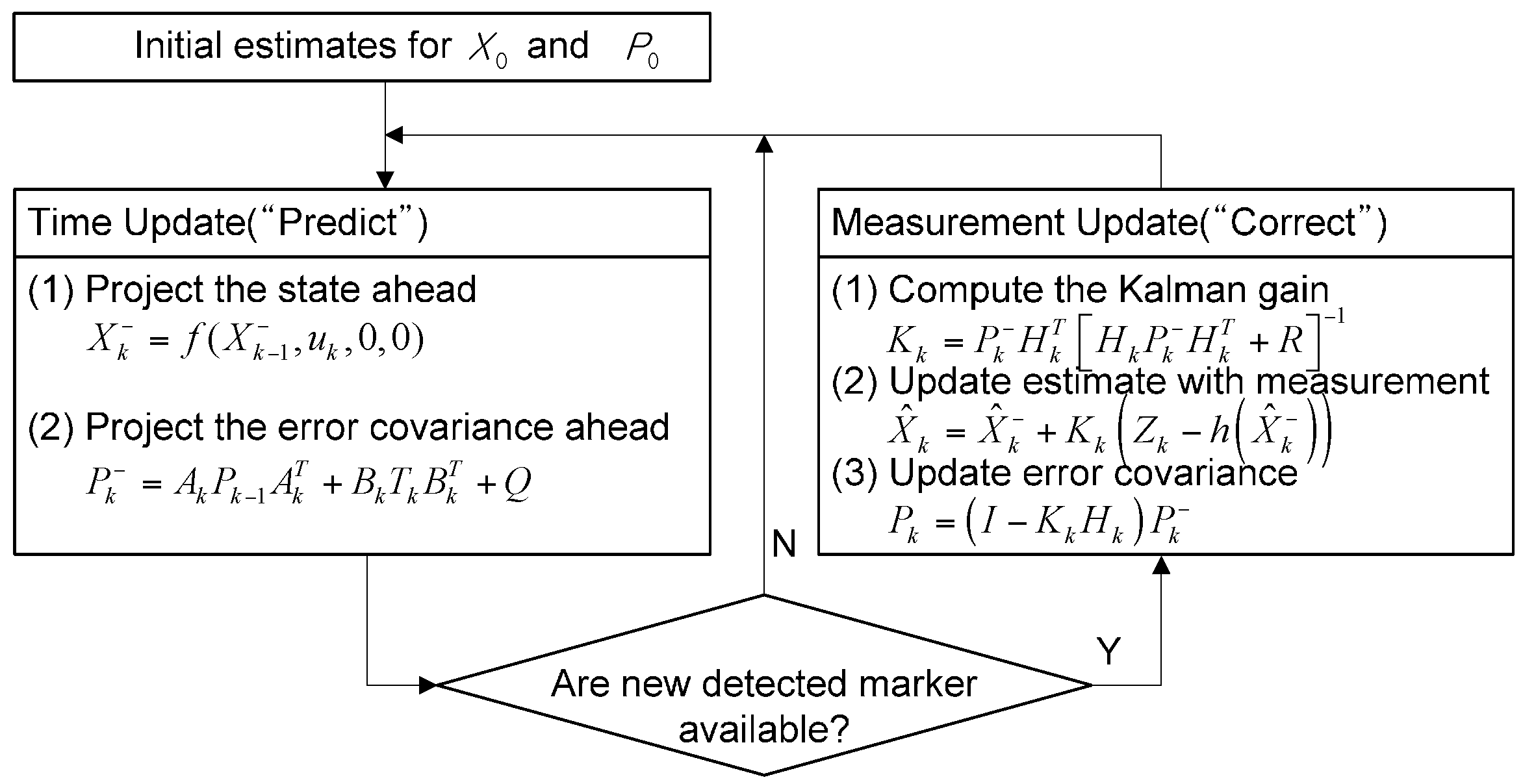
3.2.2. Integration of the Magnetic Marker and Sensor Using EKF
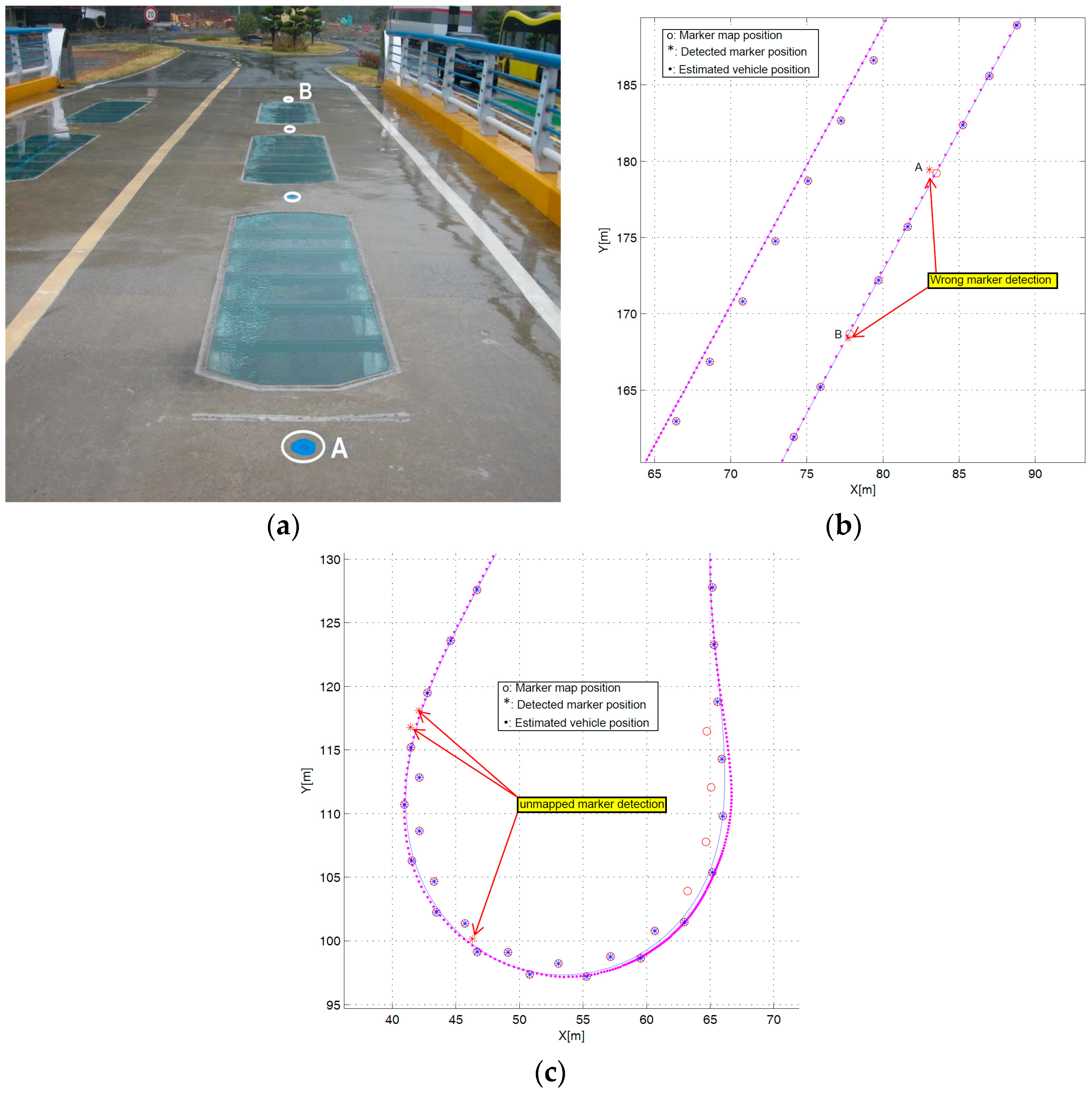
3.2.3. Identification of the Valid Magnetic Marker and Positioning Error
4. Experimental Results: Position Estimation Performance
4.1. Positioning System for Performance Evaluation
4.2. Vehicle Positioning Test
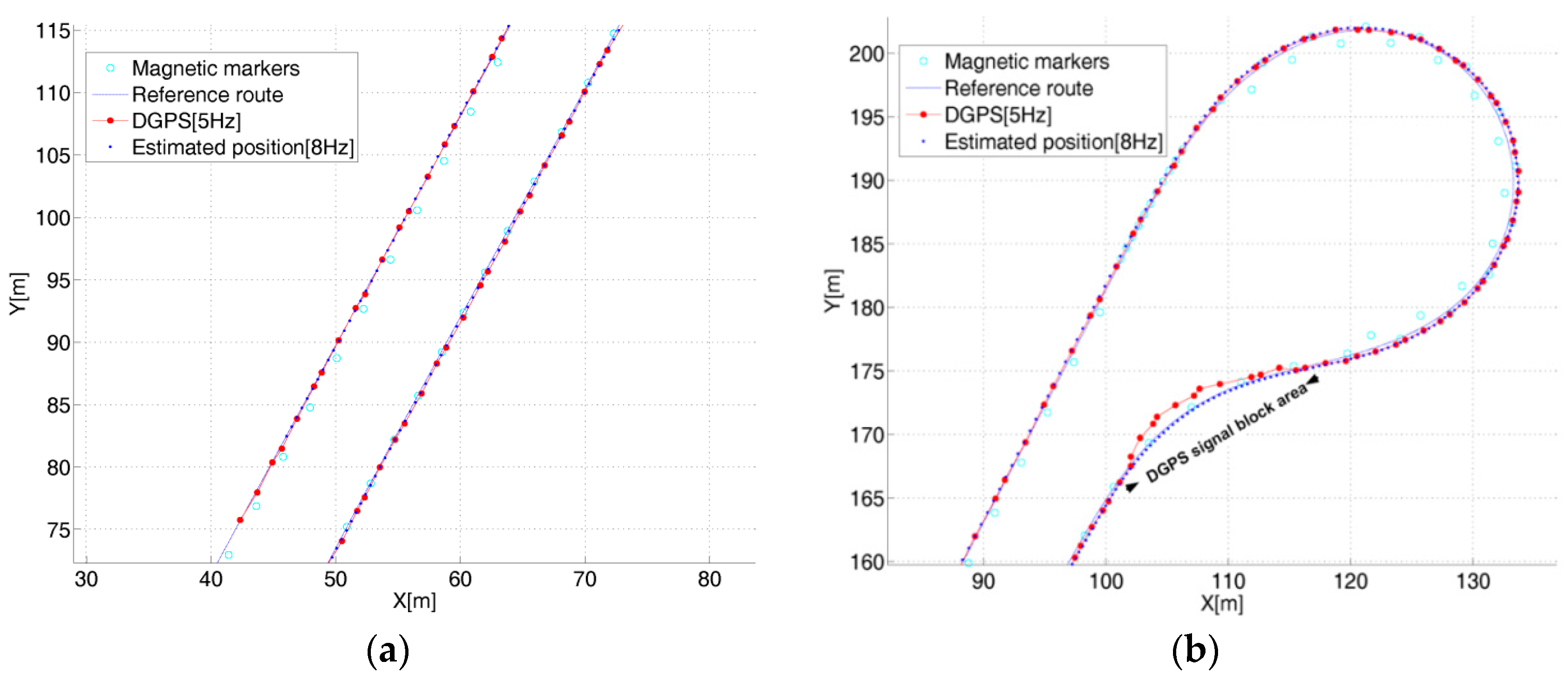
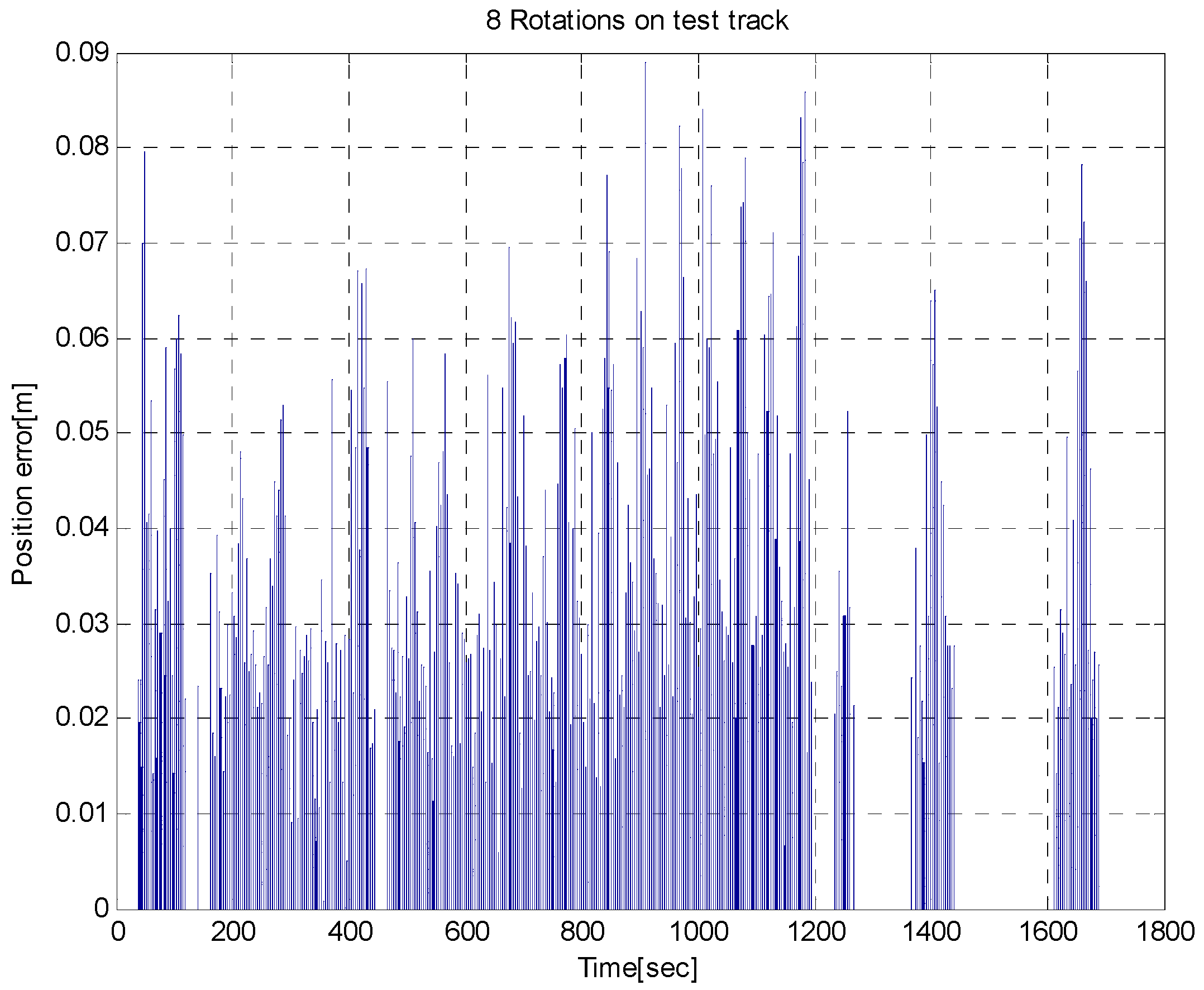
4.2.1. Positioning Test Result
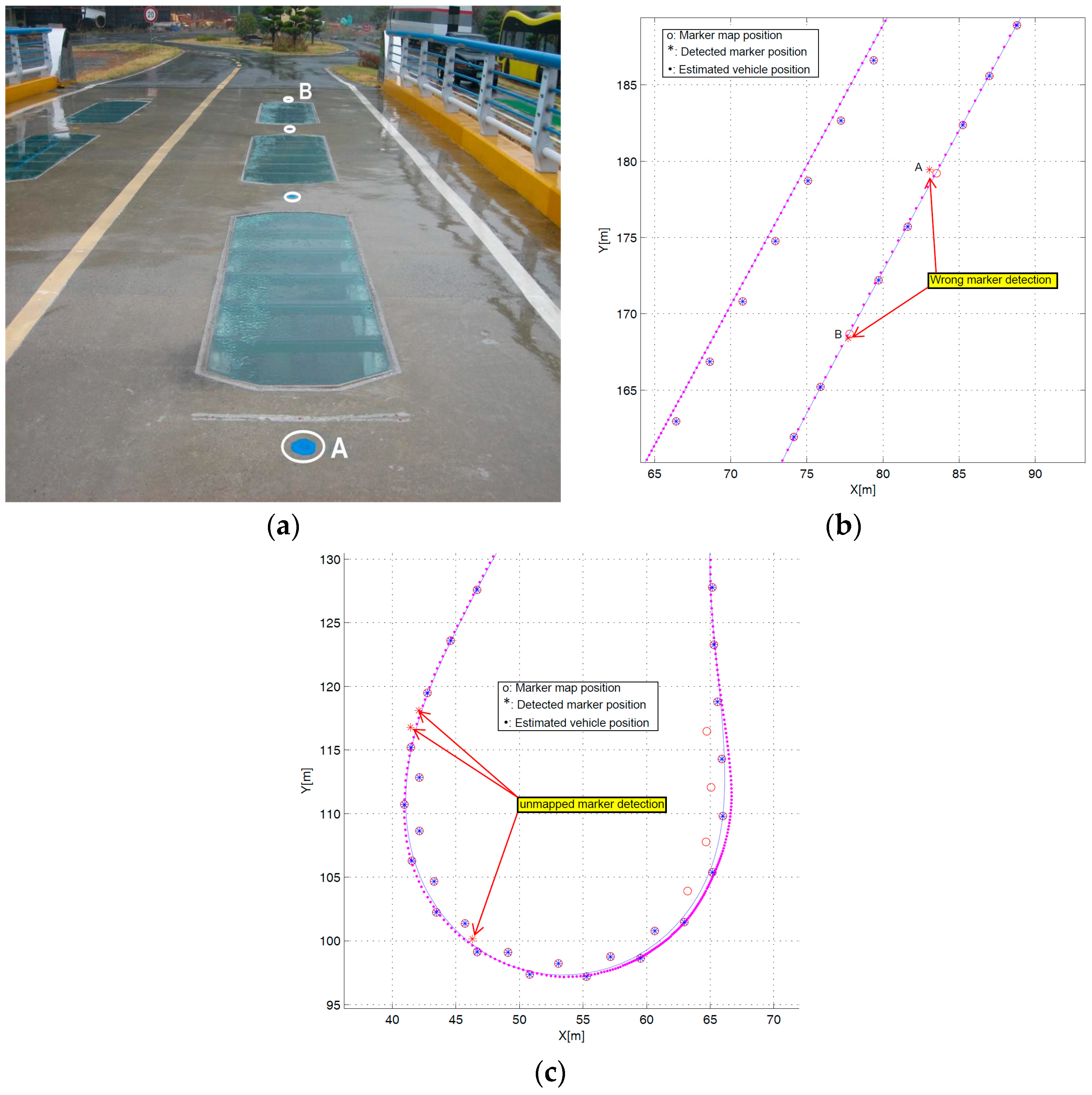
4.2.2. Magnetic Marker Detection and Validity Judgment
5. Conclusions
- Initial position and heading of the vehicle using the polarity array of the magnetic marker when the vehicle position is unknown.
- Continuous positioning combined with EKF using the instant position and heading at the moment of magnetic marker detection.
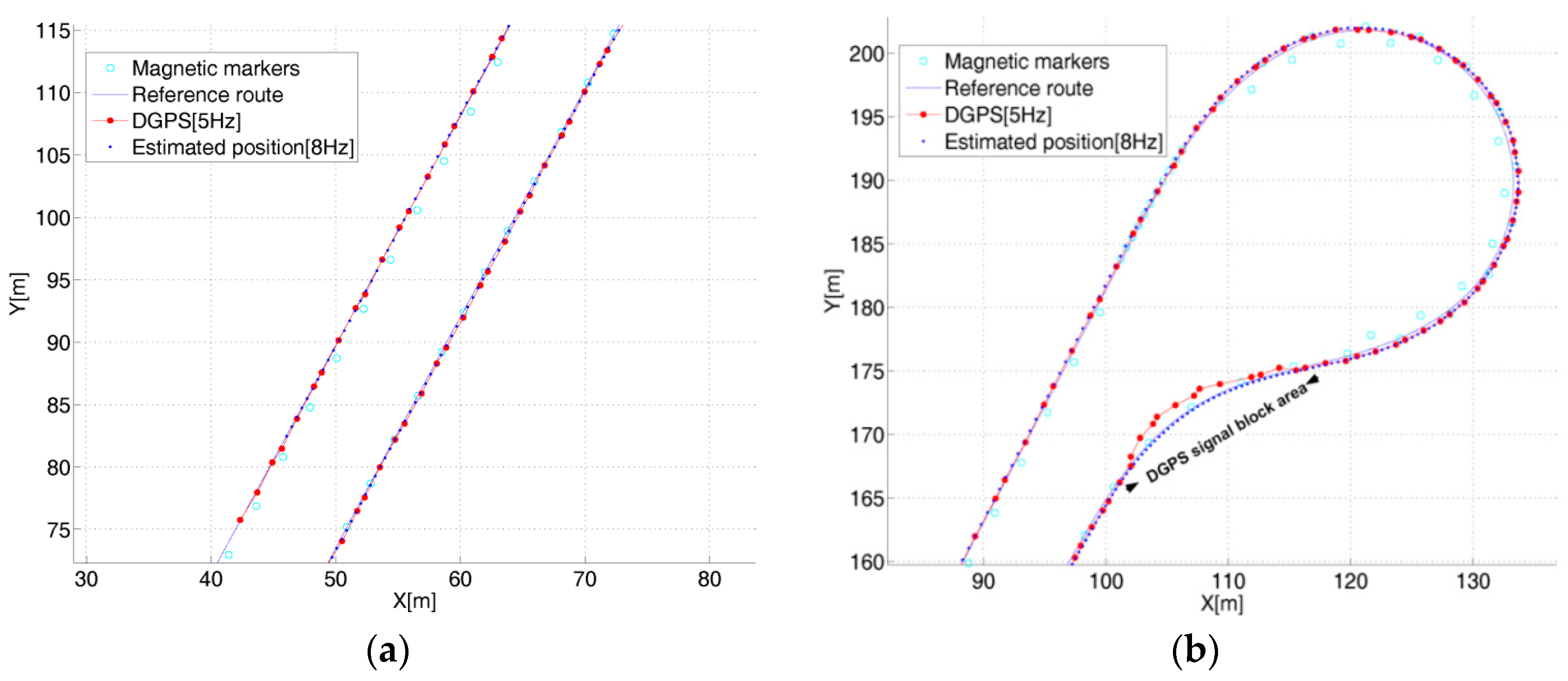
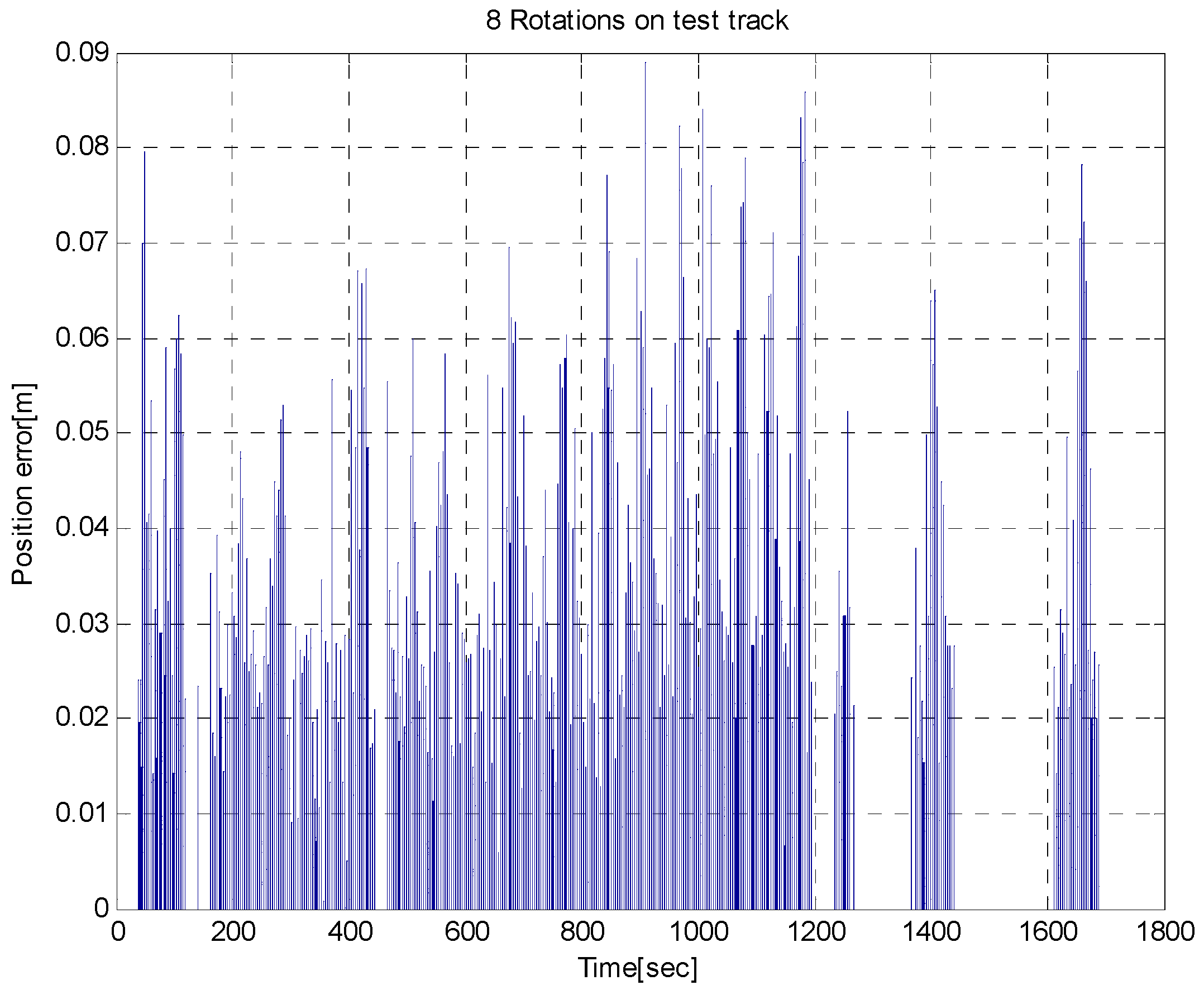
- To verify the validity of the proposed method, we compared its estimated position results with those using on-board GPS data. To verify the positioning performance under an actual environment without GPS, an evaluation of the positioning performance was conducted based on estimated magnetic marker positional information. The proposed algorithm showed superior performance in a magnetic interference environment on the road.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lee, B.-H.; Song, J.-H.; Im, J.-H.; Im, S.-H.; Heo, M.-B.; Jee, G.-I. GPS/DR error estimation for autonomous vehicle localization. Sensors 2015, 15, 20779–20798. [Google Scholar] [CrossRef] [PubMed]
- Abbott, E.; Powell, D. Land-vehicle navigation using GPS. Proc. IEEE 1999, 87, 145–162. [Google Scholar] [CrossRef]
- Jo, K.; Chu, K.; Sunwoo, M. Interacting multiple model filter-based sensor fusion of GPS with in-vehicle sensors for real-time vehicle positioning. IEEE Trans. Intell. Trans. Syst. 2012, 13, 329–343. [Google Scholar] [CrossRef]
- Bonnifait, P.; Bouron, P.; Crubille, P.; Meizel, D. Data Fusion of Four ABS Sensors and GPS for an Enhanced Localization of Car-Like Vehicles. In Proceedings of the ICRA IEEE International Conference on Robotics and Automation, Seoul, Korea, 21–26 May 2001; Volume 2, pp. 1597–1602.
- Farrell, J.; Tan, H.-S.; Yang, Y. Carrier phase GPS-aided INS based vehicle lateral control. ASME J. Dyn. Syst. Meas. Control 2003, 25, 339–353. [Google Scholar] [CrossRef]
- Farrell, J.; Barth, M.; Galijan, R.; Sinko, J. GPS/INS Based Lateral and Longitudinal Control Demonstration: Final Report; California PATH Research Report; ITS, UC Berkeley: Berkeley, CA, USA, 1998. [Google Scholar]
- Broggi, A.; Bertozzi, M.; Fascioli, A.; Bianco, C.; Piazzi, A. The ARGO autonomous vehicle’s vision and control systems. Int. J. Intell. Control Syst. 1999, 3, 409–441. [Google Scholar]
- Alonso, I.; Llorca, D.; Gavilan, M.; Pardo, S.; Garcia-Garrido, M.; Vlacic, L.; Sotelo, M. Accurate global localization using visual odometry and digital maps on urban environments. IEEE Trans. Intell. Trans. Syst. 2012, 13, 1535–1545. [Google Scholar] [CrossRef]
- Se, S.; Lowe, D.; Little, J. Vision-Based Mobile Robot Localization and Mapping Using Scale-Invariant Features. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seoul, Korea, 21–26 May 2001; pp. 2051–2058.
- Byun, Y.S.; Kim, Y.C. Heading angle estimation based on magnetic markers for intelligent vehicles. ASME J. Dyn. Syst. Meas. Control 2016, 138, 071009-1–071009-8. [Google Scholar] [CrossRef]
- Bento, L.; Nunes, U. Autonomous navigation control with magnetic markers guidance of a cybernetic car using fuzzy logic. Mach. Intell. Robot. Control Cyber Sci. 2003, 4, 3–12. [Google Scholar]
- Barata, M.; Nunes, U.; Bento, L.C.; Mendes, A. Data Fusion of Wheel Encoders and Magnetic Sensors for Autonomous Vehicles Navigation. In Proceedings of the 6th Portuguese Conference on Automatic Control (CONTROLO 2004), Faro, Portugal, 7–9 June 2004; pp. 31–37.
- Surrécio, A.; Nunes, U.; Araújo, R. Fusion of Odometry with Magnetic Sensors Using Kalman Filters and Augmented System Models for Mobile Robot Navigation. In Proceedings of the IEEE International Symposium on Industrial Electronics (ISIE2005), Dubrovnik, Croatia, 20–23 June 2005.
- Lopes, A.C.; Moita, F.; Nunes, U.; Solea, R. An Outdoor Guidepath Navigation System for AMRs Based on Robust Detection of Magnetic Markers. In Proceedings of the 12th IEEE Conference on Emerging Technologies and Factory Automation (ETFA2007), Patras, Greece, 25–28 September 2007.
- Xu, H.G.; Wang, C.X.; Yang, R.Q.; Yang, M. Extended Kalman Filter Based Magnetic Guidance for Intelligent Vehicles. In Proceedings of the Intelligent Vehicles Symposium, Tokyo, Japan, 13–15 June 2006; pp. 169–175.
- Bourny, V.; Capitaine, T.; Barrandon, L.; Gard, C.; Lorthois, A. A Localization System Based on Buried Magnets and Dead Reckoning for Mobile Robots. In Proceedings of the ISIE 2010, Bari, Italy, 4–7 July 2010; pp. 373–378.
- Tan, H.-S.; Bougler, B.; Farrell, J.; Yang, Y. Automatic Vehicle Steering Controls: DGPS/INS and Magnetic Markers. In Proceedings of the American Control Conference, Atlanta, GA, USA, 4–6 June 2003.
- Byun, Y.S.; Jeong, R.G.; Kang, S.W. Vehicle Position Estimation Based on Magnetic Markers: Enhanced Accuracy by Compensation of Time Delays. Sensors 2015, 15, 28807–28825. [Google Scholar] [CrossRef] [PubMed]
- Tan, H.-S.; Bougler, B.; Steinfeld, A. Snowplow steering guidance with gain stabilization. Veh. Syst. Dyn. 2001, 36, 279–305. [Google Scholar]
- MASDAR PRT. Available online: http://www.2getthere.eu/projects/masdar-prt (accessed on 4 October 2016).
- Frog AGV Systems. Available online: http://www.frog.nl (accessed on 4 October 2016).
- Rogers, R. Land Vehicle Navigation Filtering for GPS/Dead-Reckoning System. In Proceedings of the Institute of Navigation National Technical Meeting, Santa Monica, CA, USA, 14–16 January 1997; pp. 703–708.
- Singhall, S.; Cheriton, D. Exploiting Position History for Efficient Remote Rendering in Networked Virtual Environments. Presence Teleoper. Virtual Environ. 1995, 4, 169–193. [Google Scholar] [CrossRef]
- Park, K.; Chung, H.; Lee, J. Dead Reckoning Navigation for Autonomous Mobile Robots. In Proceedings of Intelligent Autonomous Vehicle, Madrid, Spain, 25–27 March 1998; pp. 775–781.
- Mahmoud, I.I.; Salama, M.; El-Tawab, A.A. Particle/Kalman Filter for Efficient Robot Localization. Int. J. Comput. Appl. 2014, 106, 22–27. [Google Scholar]
- Siegwart, R.; Nourbakhsh, I.R. Introduction to Autonomous Mobile Robots; MIT Press: London, UK, 2004; pp. 233–235. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Magnetic Marker Position | Polarity (N = 2, S = 1) | |
|---|---|---|---|
| [m] (E) | [m] (N) | ||
| 1 | 179,296.216 | 213,693.823 | 1 |
| 2 | 179,296.684 | 213,694.693 | 2 |
| 3 | 179,297.179 | 213,695.559 | 2 |
| 4 | 179,297.658 | 213,696.437 | 1 |
| 5 | 179,298.147 | 213,697.315 | 2 |
| Magnetic Sensor Array Gap | 1 cm |
|---|---|
| Horizontal measurement range | 32 to 256 cm |
| Measurement height allowable | 5 to 40 cm (from ground) |
| Degree of precision | ±2 cm (H 20 cm, speed 10 m/s) |
| Operation temperature range | −20 to 70 °C |
| Maximum speed range | 25 m/s (90 km/h) |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Byun, Y.S.; Kim, Y.C. Localization Based on Magnetic Markers for an All-Wheel Steering Vehicle. Sensors 2016, 16, 2015. https://doi.org/10.3390/s16122015
Byun YS, Kim YC. Localization Based on Magnetic Markers for an All-Wheel Steering Vehicle. Sensors. 2016; 16(12):2015. https://doi.org/10.3390/s16122015
Chicago/Turabian StyleByun, Yeun Sub, and Young Chol Kim. 2016. "Localization Based on Magnetic Markers for an All-Wheel Steering Vehicle" Sensors 16, no. 12: 2015. https://doi.org/10.3390/s16122015
APA StyleByun, Y. S., & Kim, Y. C. (2016). Localization Based on Magnetic Markers for an All-Wheel Steering Vehicle. Sensors, 16(12), 2015. https://doi.org/10.3390/s16122015