1. Introduction
With the integration of agricultural and IT technology, accurate real-time monitoring and control systems for precision agriculture, like greenhouses, has been a desired requirement. Compared with traditional labor-intensive agriculture, reasonable environmental regulation, such as CO
2 concentrations in the greenhouse, can effectively increase crop yield [
1,
2]. On the other hand, particularly in some developing countries, like China, with a relatively large demand in terms of grain storage and transport, the security of crops has become a significant issue. Therefore, a reasonable method to further reduce potential product losses caused by unpredictable harmful factors is of great importance in current agriculture. Therefore, vertical farming technology with accurate monitoring and control of agricultural factors has gradually attracted more attention in precise agriculture [
3,
4,
5].
Besides the existing controllable environmental factors, including temperature and humidity, the potential effectiveness of CO
2 fertilization in the greenhouse requires accurate and reliable detection and a smart control on CO
2 concentration. Due to special application environmental conditions, the existing CO
2 sensing techniques, including semiconductor, electrochemical, and infrared absorption spectroscopy [
6,
7], are greatly restricted and limited. For example, the mixed multi gas species in the greenhouse limit the feasibility of the semiconductor sensors. The commonly used electrochemical sensors, such as the commercially available MG811 from Winsen, have some inevitable shortcomings in sensing performances, including limited detection range, low accuracy, and high power consumption [
7,
8]. Among the detailed sensing technologies, like direct absorption spectroscopy (DAS) [
9,
10], photo-acoustic spectroscopy (PAS) [
11], and tunable diode laser absorption spectroscopy (TDLAS) [
12,
13,
14], because of its cost-effectiveness and feasibility in special applications in the environment of the greenhouse, the utilization of DAS sensing technology is reasonable and becoming increasingly popular.
As a communication tool between the control platform and sensor nodes, wireless sensor networks (WSNs) have been deployed as a reasonable and low-cost communication technology which can avoid the costly installment of telecommunication infrastructures and wired communications [
15]. Compared with Power Line Communication (PLC), the WSNs have advantages including fault-tolerant ability, multi-faceted detection based on high redundant deployments, and fixable installment ability in complex environments. Besides the application in prevention and early detection of forest fires [
16], an application of real-time monitoring and smart fertilization control has been significantly developed in intelligent agriculture [
17,
18], like smart compositing monitoring and control [
19]. In addition, the relatively small size, implying a flexible integration with the sensor node, provides the possibility for managers to realize a unified management for an extensive planting area. In the application of wireless communication, some technologies, like Wi-Fi and Bluetooth, are mature and commonly used in the smart home [
20]. However, due to the inherent data transmission rate characteristic which does not target the application for WSNs in the greenhouse, there is a relatively severe penalty in energy consumption. By contrast, wireless communication technologies at 443 MHz have a relatively strong penetration, indicating a long transmission distance for dealing with the inevitable plant shelter, which is a key advantage in its application in the greenhouse. Moreover, the integration between Global System for Mobile Communication (GSM) communication and WSN technology further enhances remote monitoring and control. In the current research, a Digital Enhanced Cordless Telecommunications (DECT) subnet is connected to a GSM coordinator [
21]. In the actual application circumstance, the power consumption, node sides, and cost-effectiveness would be significant challenges, which would also restrict the selection and application in data transmission [
22].
With the development of precision agriculture, traditional manual management and testing instruments were grandly replaced by the automatic developed smart terminal based on PC software like LabVIEW and LabWindows [
23]. LabVIEW software from National Instruments (NI) Company is programmed by visual graphic G language. A development environment of LabVIEW creates flexible and scalable test and control applications. This software is able to make full use of computer resources to generalize instrument hardware, such as the expensive Data Acquisition (DAQ) board and related matching circuits. With the wide application range from basic interface to complicated signal processing, the sophisticated optimized program can be integrated into the background of the user interface to improve the compatibility and adaptation.
Since the first greenhouse was established in China in the late 1970s, the crop yield from solar greenhouses has increased by more than 3400 km
2 from 1820 to 2010. With the further development of precision agriculture, this technique, which improves crop yield by artificially increasing CO
2 concentration, has increased economic profits by ~30%, reported by the official assessment [
1]. However, with the calibration of long-term monitoring of historical data of plants and utilization of trial and error, the optimized CO
2 concentration in the growth of crops still extremely depends on experience. Besides the crop yield, the CO
2 gas fertilization also has beneficial effects on the maturing period of crops and ability to resist diseases and pests. In sum, with a reliable monitoring system, automatic and accurate CO
2 fertilization is desired in the development of the greenhouse.
What is more, this system regards accurate detection and control as the major purpose, and meanwhile tries to balance the benefit trade-off in reducing the engineering cost by optimizing measurement and control components. The smart WSN working mode based on RSSI (Received Signal Strength Indication) evaluation can adjust the transmission power automatically to increase the service life of the sensor nodes. In addition, the tolerable communication error rate can be ensured at the same time. With the basic support of monitoring and communication functions, the control facilities can realize a desired CO2 concentration regulation based on Fuzzy proportional, integral, and derivative (Fuzzy-PID) in the greenhouse.
The structure of this paper is organized as follows. In
Section 2, the structure of this monitoring and control system is described, including a fabricated NDIR CO
2 sensor working as the sensor node in WSN and related Fuzzy-PID control. In
Section 3, a series of experiments in the laboratory are carried out to evaluate the system. The Fuzzy-PID regulation function is designed and implemented based on LabVIEW. In
Section 4, a field deployment is performed to prove the desired functions, including environmental information monitoring, reliable wireless communication, and required CO
2 concentration regulation. Finally, in
Section 5, some conclusions are reached.
2. Structure of the Monitoring and Control System
2.1. System Structure
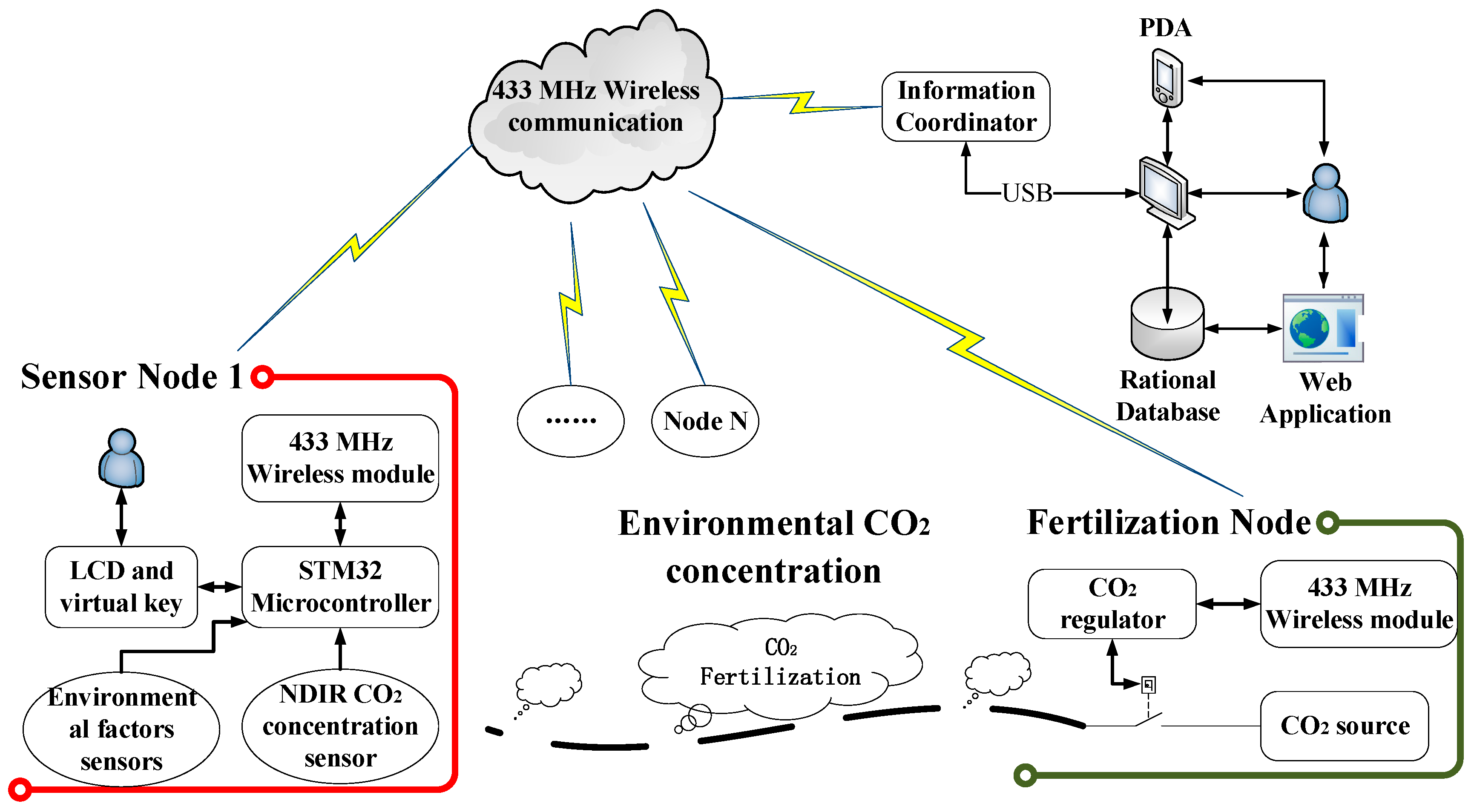
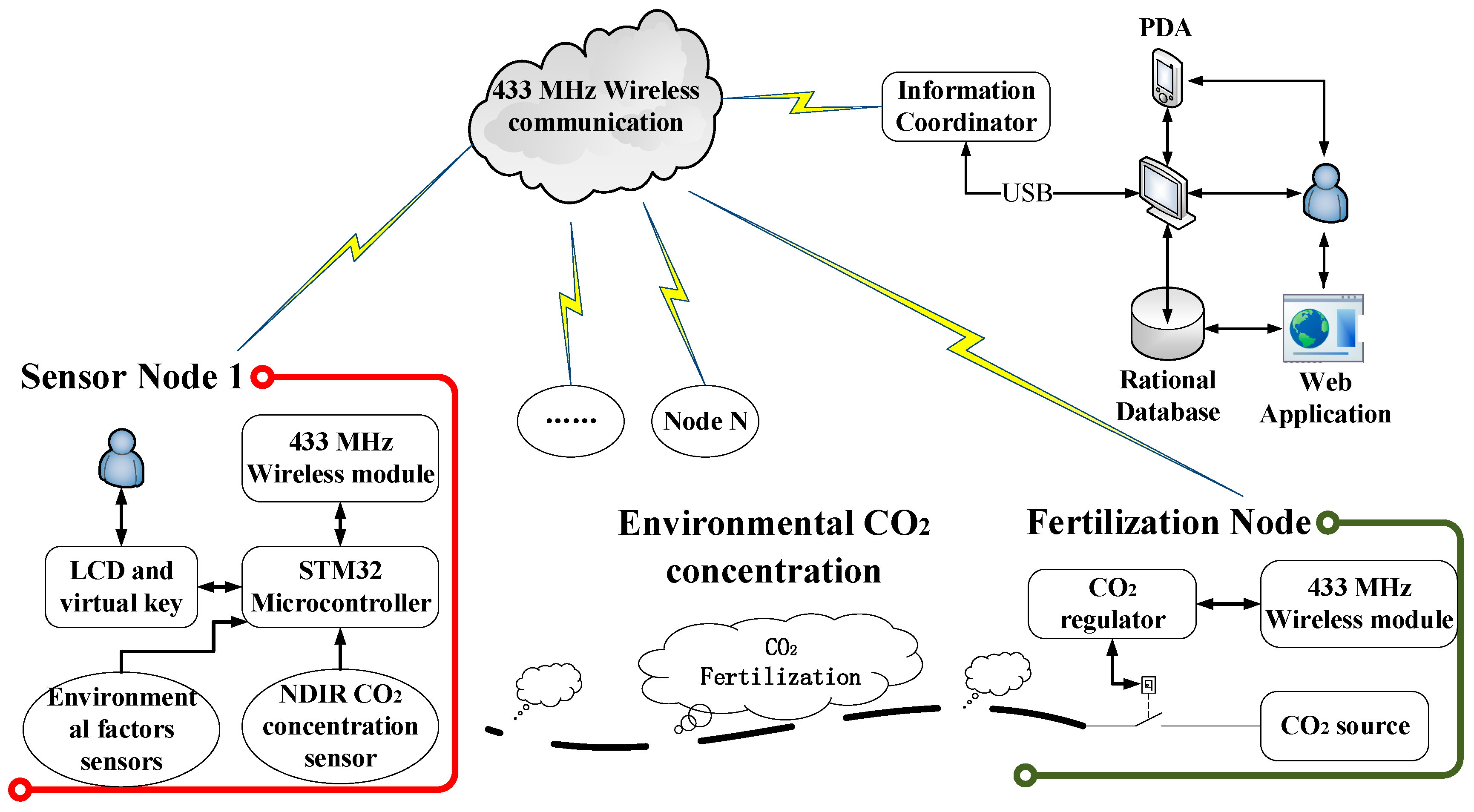
The structure of this monitoring and control system is shown in
Figure 1. There are four main sections. Firstly, the CO
2 concentration sensor node based on NDIR technology with anti-condensation prevention and wireless communication is used to measure the required environmental factors and transmit data. Secondly, the established wireless sensor network realizes the function of data transmission and smart regulation of transmission power. Thirdly, the interactive software platform based on LabVIEW achieves signal processing and synchronization with the remote terminals. Finally, the control node fertilizes a suitable amount of CO
2 in the greenhouse following the transmitted control parameters by the software platform on the terminal. These four sections establish a closed-loop monitoring and control system to realize CO
2 measurement and fertilization.
2.2. Sensor Node Design and Implementation
2.2.1. Infrared CO2 Sensor Design and Implementation
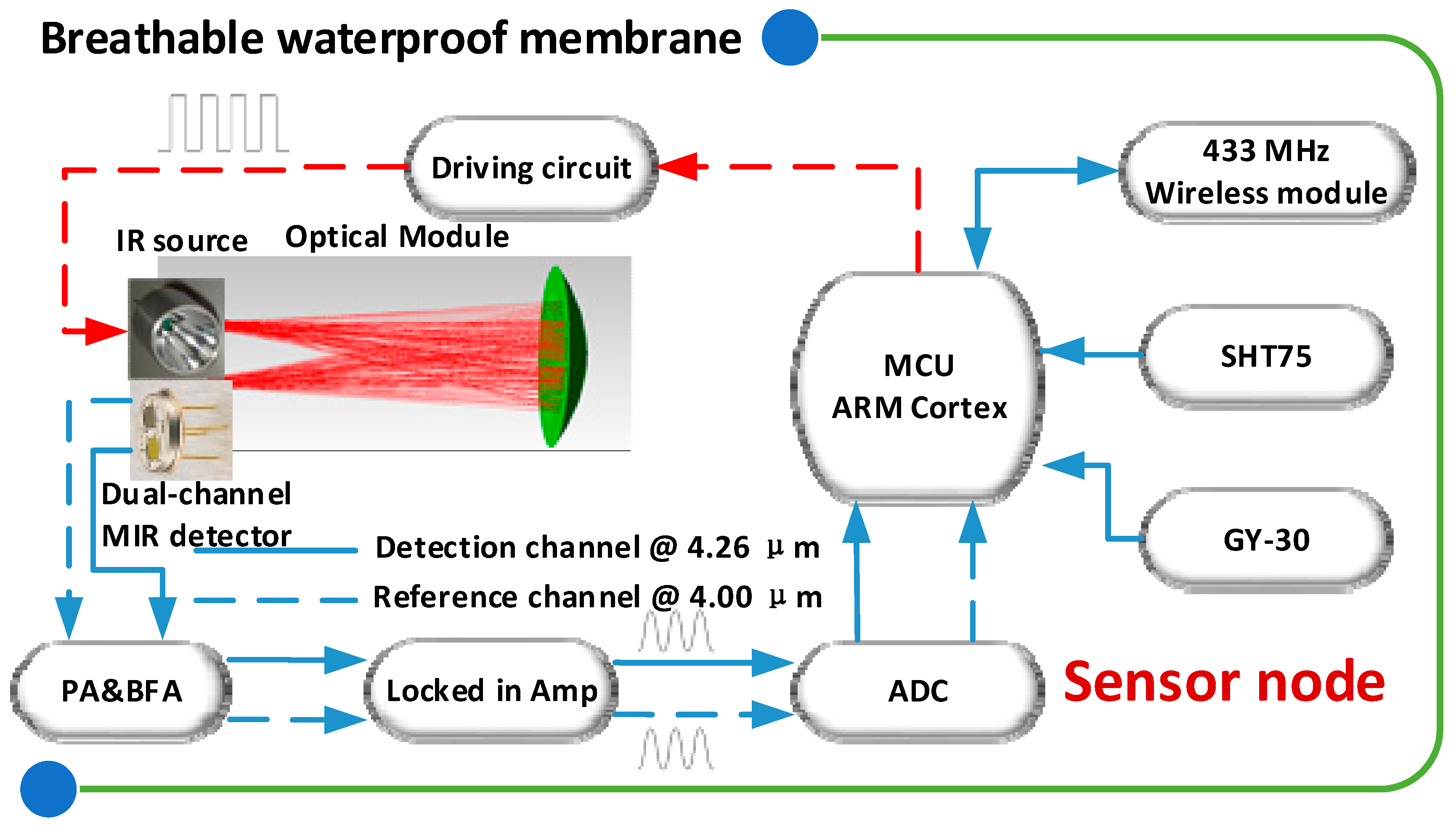
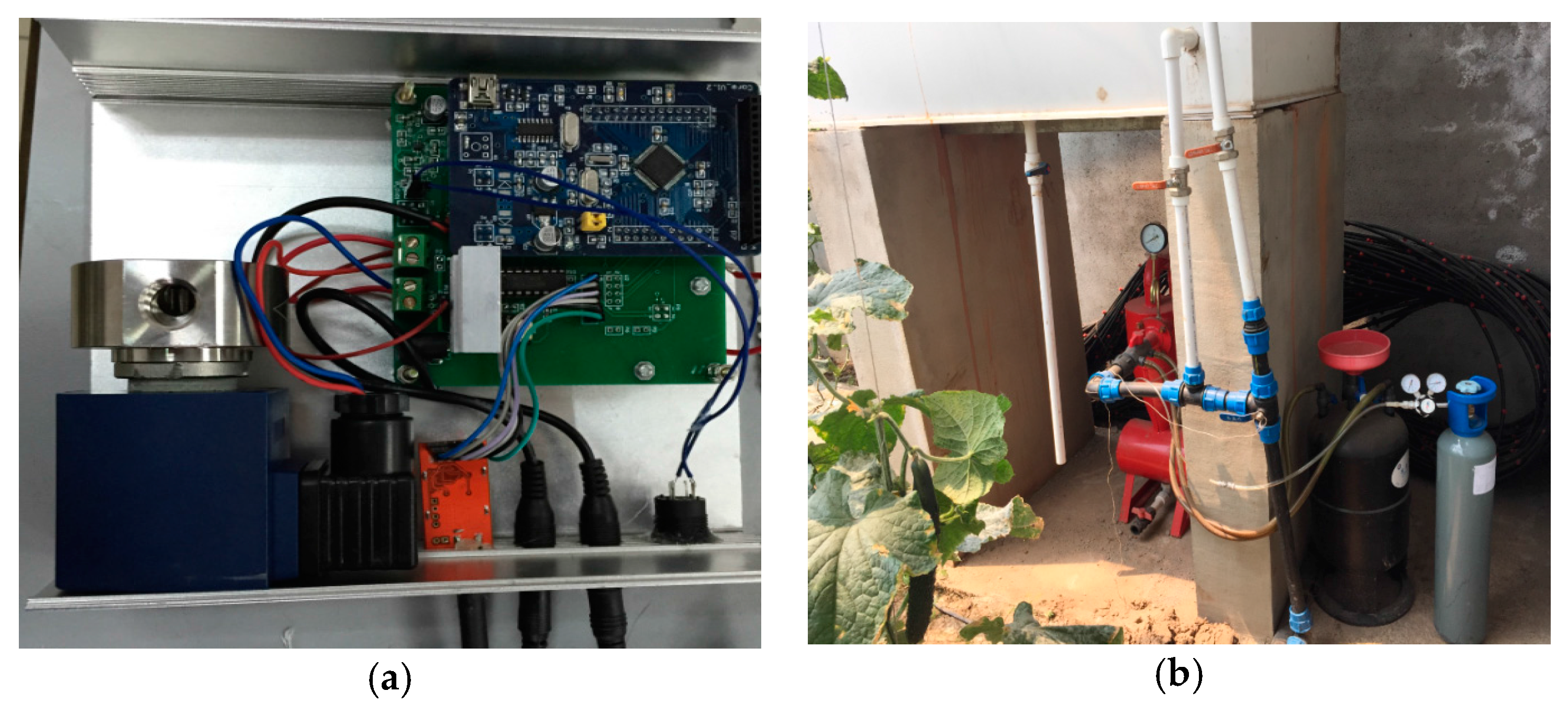
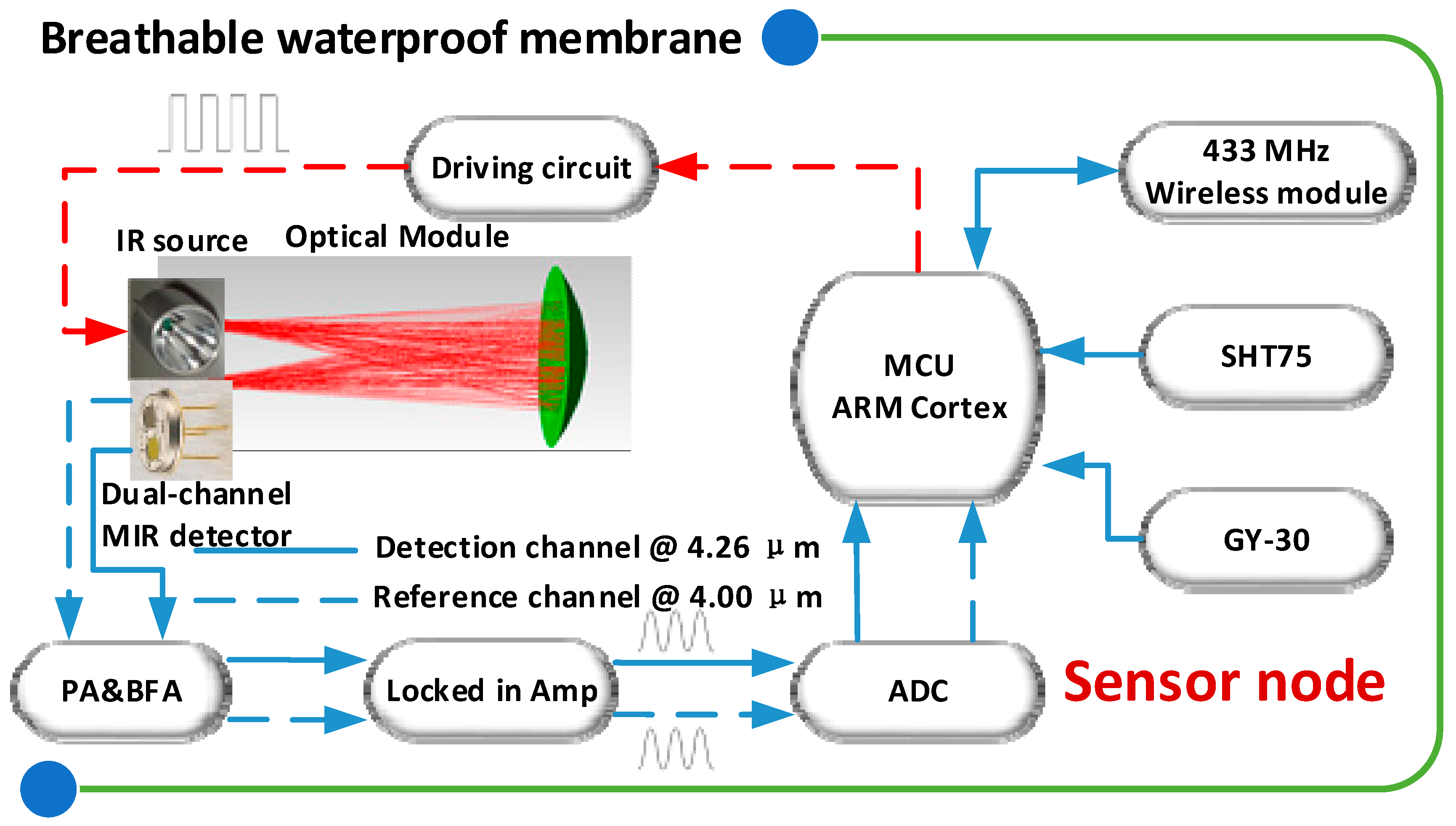
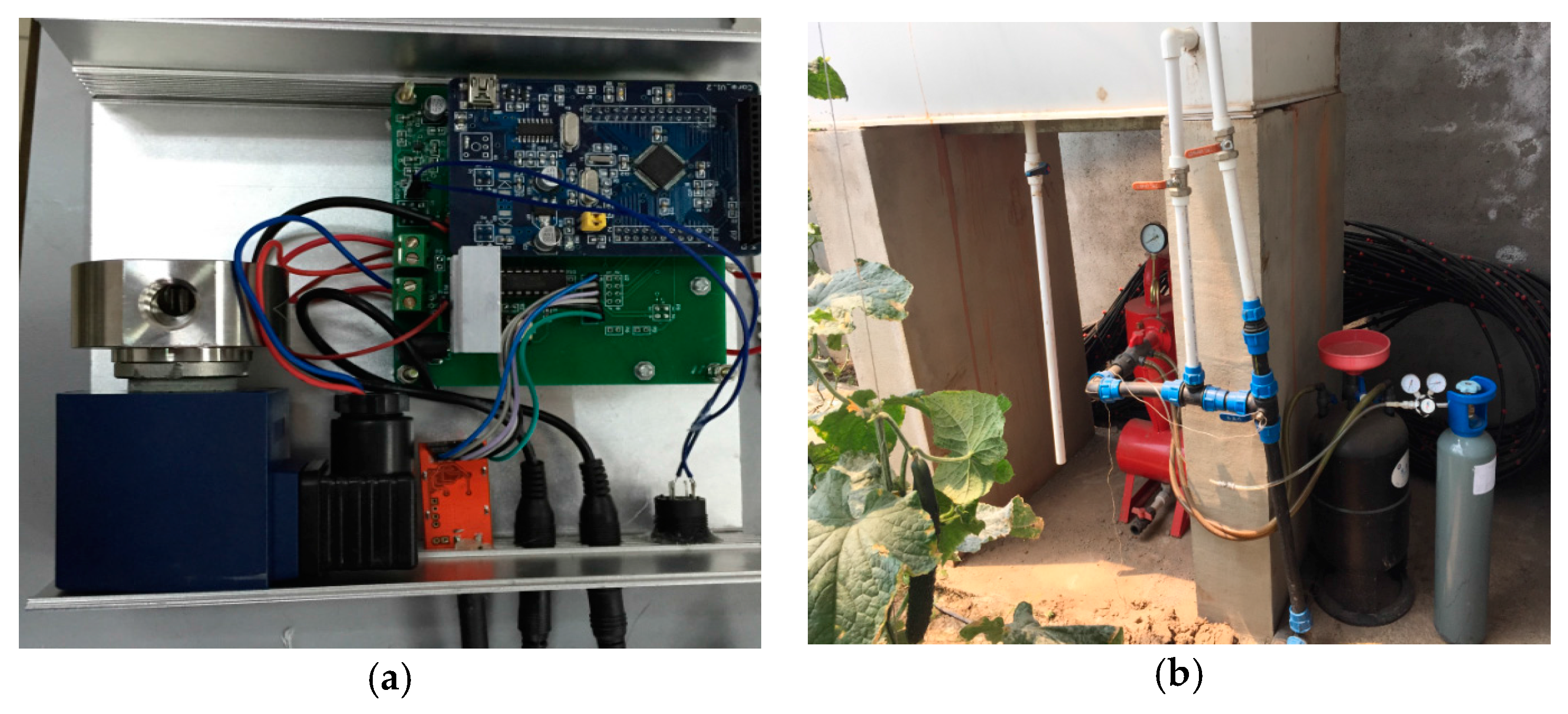
The structure of a CO
2 sensor node is shown in
Figure 2. In order to ensure accurate CO
2 fertilization, the CO
2 sensor was designed and implemented based on infrared technologies with waterproof membranes prevention. The fabricated CO
2 sensor includes two main parts, which are the optical part and electrical part. In the optical part, the used heat source (IR55, HawkEye, Milford, CT, USA) was fabricated with micro-electromechanical system (MEMS) technology and covering the required wavelength range. The pyroelectric detector (LIM262) (InfraTec, Dresden, Germany), equipped with two inherent filters, has a detectivity (D*) of 3.5 × 10
8 and receives the light reflected by a special spherical mirror, which was also used as a light-collector. In the electrical part, firstly, the IR heat source is driven by a desired signal. This signal was generated by micro-controller to MOSFET (Metal-Oxide-semiconductor Field-Effect Transistor). In consideration of it being fast switching and low on resistance, IRF830SPbF MOSFET was selected. Secondly, the generated signals by the detector are processed by a pre-amplifier (PA), a band-pass filter (BPF), a lock-in amplifier, and an analog-to-digital convertor (ADC). In the detection part, the pre-amplifier, whose core chip is INA116 (Texas Instruments, Dallas, TX, USA), plays a crucial role in suppressing noise and improving the signal-to-noise ratio (SNR). In the lock-in amplifier, the micro-controller was used to realize the digital phase shift function. The AD630 (Analog Device Inc., Norwood, MA, USA) works as the multiplier for the two-channel signals, with same frequency and phase. In the noise filter selection, an 8th-order Butterworth filter MAX291 (Maxim integrated, San Jose, CA, USA) was prioritized. In order to further improve the accuracy of digital–analog conversion, the low power consumption, 16-bit ADC MAX1416 (Maxim integrated, San Jose, CA, USA) was used to replace the internal 12-bit ADC of the micro-controller. This chip owns an inherent Σ-Δ with a digital filter. Finally, the measured data is packaged and sent to a 433-MHz wireless module. In the design and implementation of hardware, besides the basic function and performance, factors including energy consumption, scalability, and cost-effectiveness were significant reference indicators.
For measurement of environmental factors, a temperature and relative humidity multi sensor (type: SHT15, Sensirion, Laubisruetistrasse, Switzerland) was selected due to advantages including calibrated digital output, high reliability, and excellent long-term stability based on industrial CMOS processes with patented micro-machining (CMOSens® technology, Laubisruetistrasse, Switzerland), which is characterized by the fusion of the sensor element and the signal conditioning electronics on a single silicon CMOS chip. Under this technology, a “micro-machined” finger electrode system with different protective and polymer cover layers forms the capacitance for the sensor chip, which protects the sensor from interference. A digital 16-bit ambient light sensor (type: BH1750FVI, ROHM, Tokyo, Japan) was selected for luminance measurement covering the desired ambient range from 400 nm to 710 nm, with a standby current low of up to 1.0 μA.
Before the light propagates to the detector, the light was filtered by two filter windows, corresponding to the detection channel at 4.26 µm and reference channel 4.00 µm. The detection channel and reference channel correspond to the strong absorption region of CO2 and nearly no absorption region of CO2, respectively. Because of the same background conditions, such as transmission path and light source, the environmental interference could be suppressed. In consideration of the modulation frequency limitation of both the IR heat source and the pyroelectric detector, the IR source was modulated by a 4 Hz square-wave signal. At both filter windows, the possible influential absorption interference from H2O and CH4 is five orders lower than CO2, so their interferences can be ignored. Since the two received optical beams by the dual-channel detector are highly related, a differential and ratio operation between them was performed to suppress the interferences from the sensor itself and possible outside interference in long-term utilization in the greenhouse.
The Beer–Lambert law in Equation (1) shows the relationship between the CO
2 concentration and the received light intensity as:
where
I is the light intensity received by the detector at
,
I0 is the initial emitting light intensity of the source at
,
K is the absorption coefficient,
C is the CO
2 concentration, and
L is the optical length.
Under modulation, the time-dependent light intensities
at
λ1 = 4.26 µm and
λ2 = 4.00 µm will be converted to
and
. Define their amplitude as
U1 and
U2, respectively. The final CO
2 concentration could be expressed as a function of the differential voltage as:
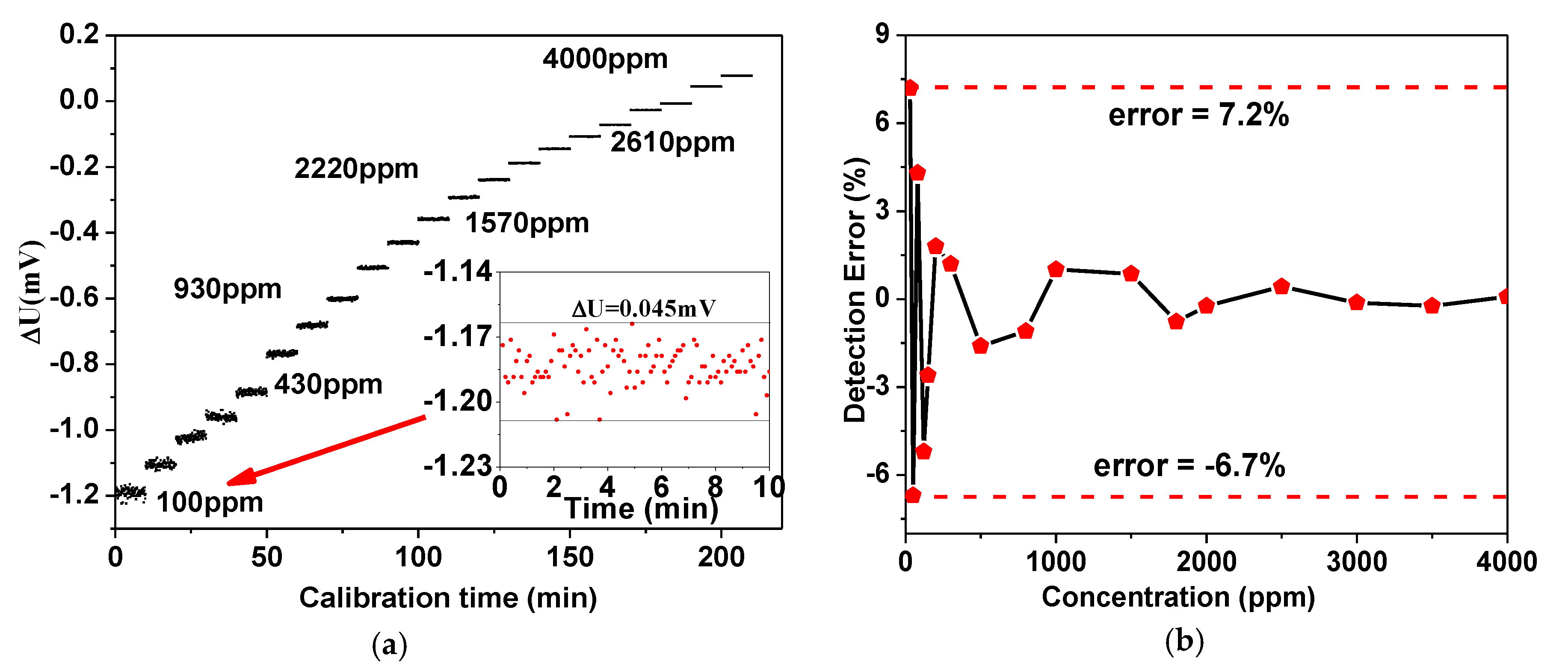
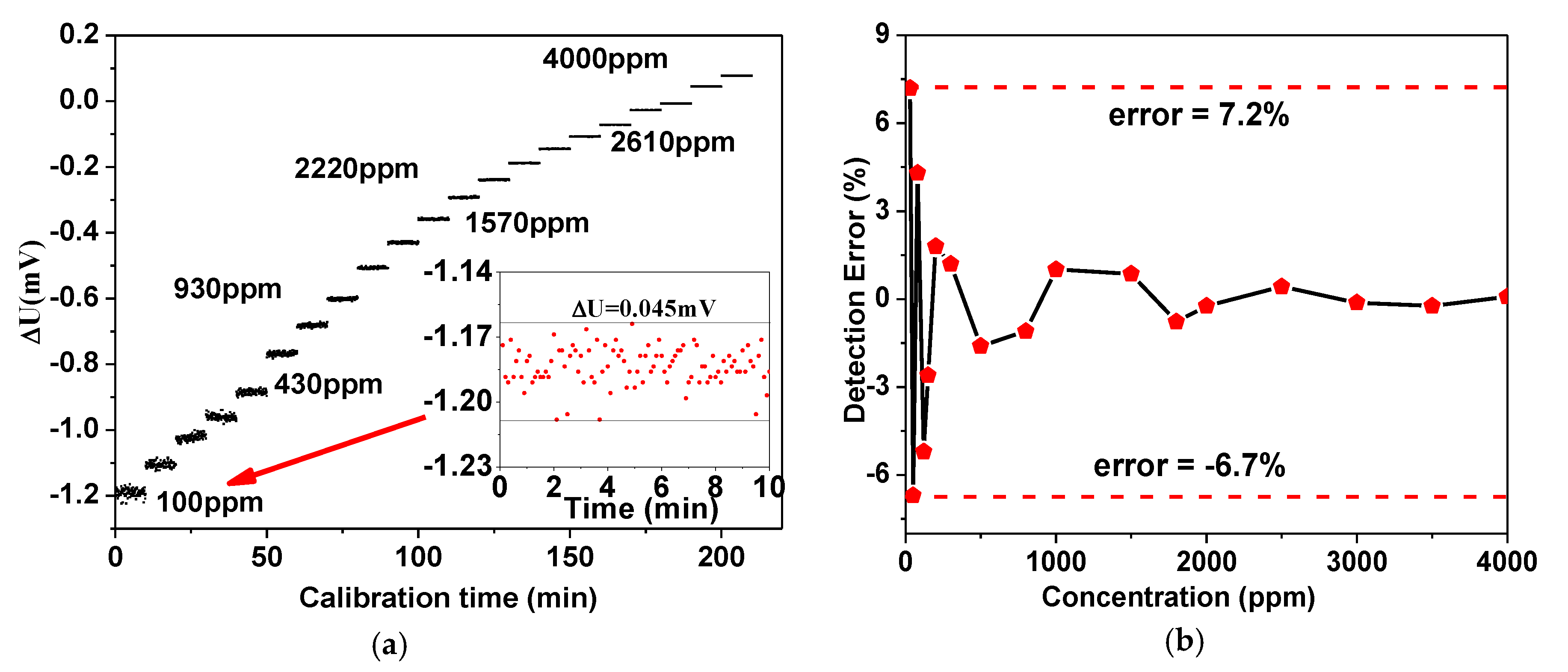
In Equation (2), k1 and k2 are the relative optical-to-electrical conversion coefficients at λ1 and λ2 respectively, is the difference between the amplitude of the detection signal (U1) and the amplitude of the reference signal (U2). Such a relation can be obtained through a calibration experiment. The actual relationship between the CO2 concentration and measured voltage signals can be achieved through calibration.
2.2.2. Environmental Factors Sensing
A commercial SHT15 (Sensirion, Laubisruetistrasse, Switzerland), a relative humidity and temperature integrated sensor was selected. The accuracy of humidity and temperature are 3.0% and 0.4 °C, respectively. The best performance is near 28 °C and 80% humidity, which are applicable conditions in a greenhouse. Besides the inherent accuracy of the NDIR gas sensor itself, the calibration, depending on the application environment, is able to further enhance the performance of the CO
2 sensor. In order to get more accurate environmental factors, the related calibrations are necessary. In addition, based on the working conditions, like voltage supply, temperature, humidity, and inherent ADC resolution, the nonlinear compensation of humidity detection and humidity compensation to temperature detection can be calibrated. Firstly, because of the inherent characteristic of the humidity sensor, the error from voltage dependence can be ignored. To compensate the non-linearity of the humidity result and obtain a full accuracy, the error from the ADC should be calculated and calibrated as:
where
SORH is a direct digital output from insider ADC, and
RHReading is the calibration results. The linearization coefficients for humidity with the second-order polynomial fitting are decided according to the relationship between the standard relative humidity and the direct output result
SORH from the datasheet of RH and Temperature Non-Linearity Compensation. After the related fitting and calibration, the constant variables
c1,
c2, and
c3 in Equation (3) match different values corresponding to the ADC sampling bits.
However, in the greenhouse, there is a large diurnal temperature, which indicates that the temperature coefficient of the relative humidity sensor should be considered as:
Equation (4) was used to calibrate the temperature result according to the power supply and ADC bits corresponding to the parameters d1, d2, and TReading, respectively. Then the calibrated temperature was used to calibrate the errors caused by the temperature significant difference from 25 °C. In addition, t1 and t2 are two constant values depending on the ADC resolution.
BH1750FVI is a digital ambient light sensor a peak sensitivity wavelength of 560 nm and a high resolution from 1 to 65,535 lx. The measured luminance was converted by a 16-bit ADC and transmitted by I2C bus to the microcontroller. Because of the spectral responsivity of human eye, the measured ambient light can also be used to adjust the LCD power in the embedded terminal to save power.
2.2.3. Waterproof Deployment for Anti-Condensation
The most serious constraint factor for the utilization of NDIR technology is the complicated environmental influence, such as the high humidity in the greenhouse. Even the DAS has a relatively wider application with better fault-tolerance; the dew condensation on the optical part will also bring severe errors. In order to satisfy the application requirement in the greenhouse environment, an intensively-designed waterproof breathable membrane was used as a protection layer for the chamber. Besides a compromise selection between waterproof ability and breathability, the abilities of anti-high-humidity and anti-high-temperature should also be considered. Therefore, the breathable waterproof membrane made of expanded Polytetrafluoroethylene (Eptfe) was selected and covered on the ventilation holes.
2.3. Wireless Communication
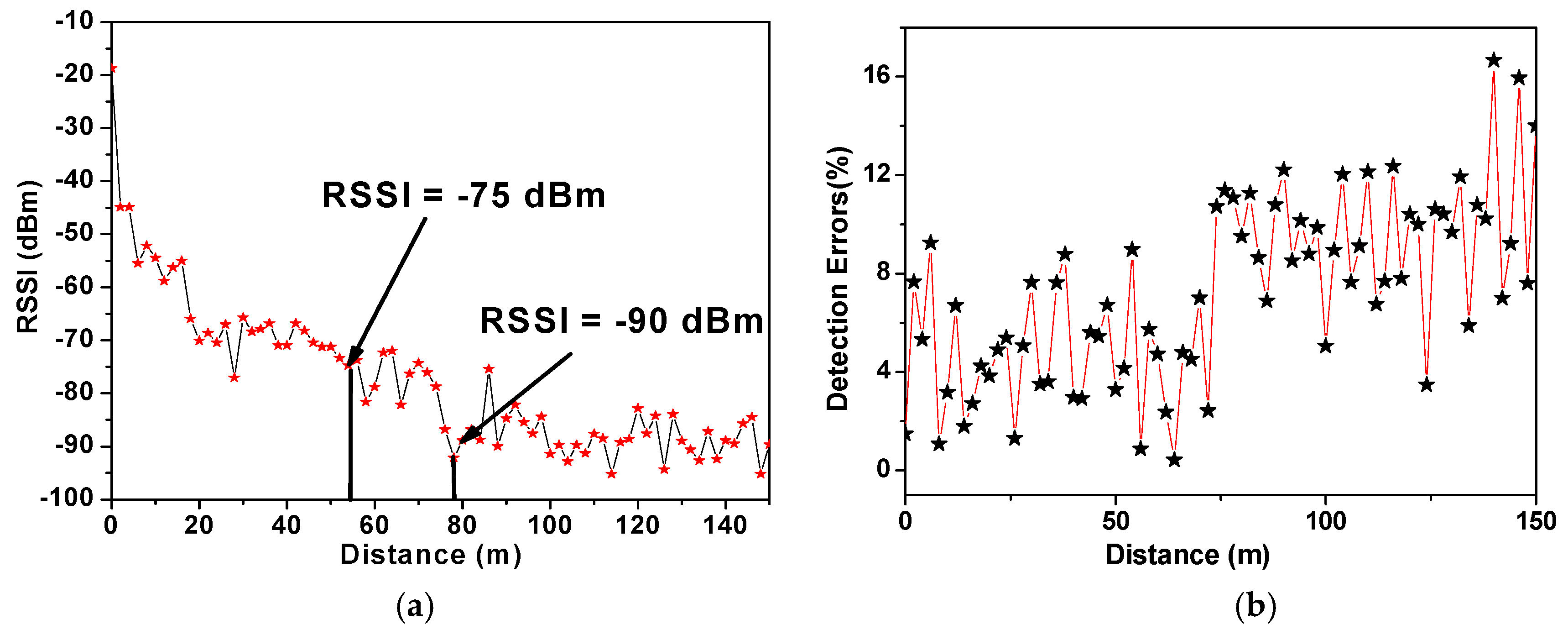
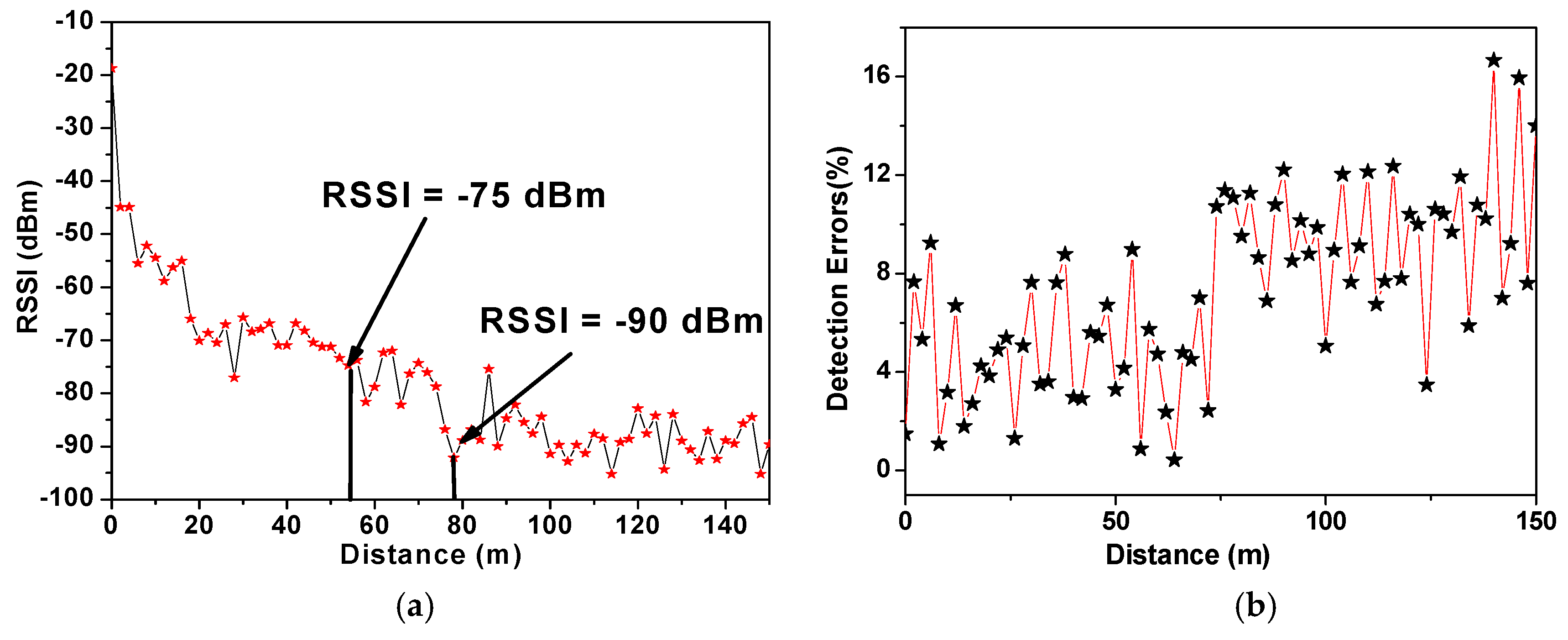
WSN communication protocol plays a fundamental role in data collection and feedback control. In the selection of a wireless module, low power consumption and stability which is specific as link budget, are two considerable factors. The core component selected in the wireless module is Si446x (Eptfe, Silicon Labs, Austin, TX, USA), including Si4460/61/63/64, with a working frequency range from 119 MHz to 1050 MHz and a link budget up to 146 dB. In consideration of cooperation with other research groups, Si4463 working in 433 MHz was the final option, with a maximum output power of 20 dBm (100 mW) and transmission current consumption of 70 mA. The optional multi-band switching makes the ad hoc networks possible in future development. Under the maximum transmission power of 100 mW, the corresponding ideal transmission distance is nearly 1000 m. However, the power should be adjusted reasonably according to the RSSI value. Although, the RSSI value, which implies the link quality, is vulnerable to the application environment, such as humidity, temperature and plant shelter conditions, and reliable transmission distance. Therefore, in consideration of a comprehensive influence in the greenhouse environment, link quality, co-channel interference, and plant shelter, the RSSI value was set in the range from −70 dBm to −90 dBm. For sensor nodes, the inherent transmission parameters of wireless modules, including configuration of the module channel, transmission power, and Identification (ID) number, can be adjusted by the micro controller.
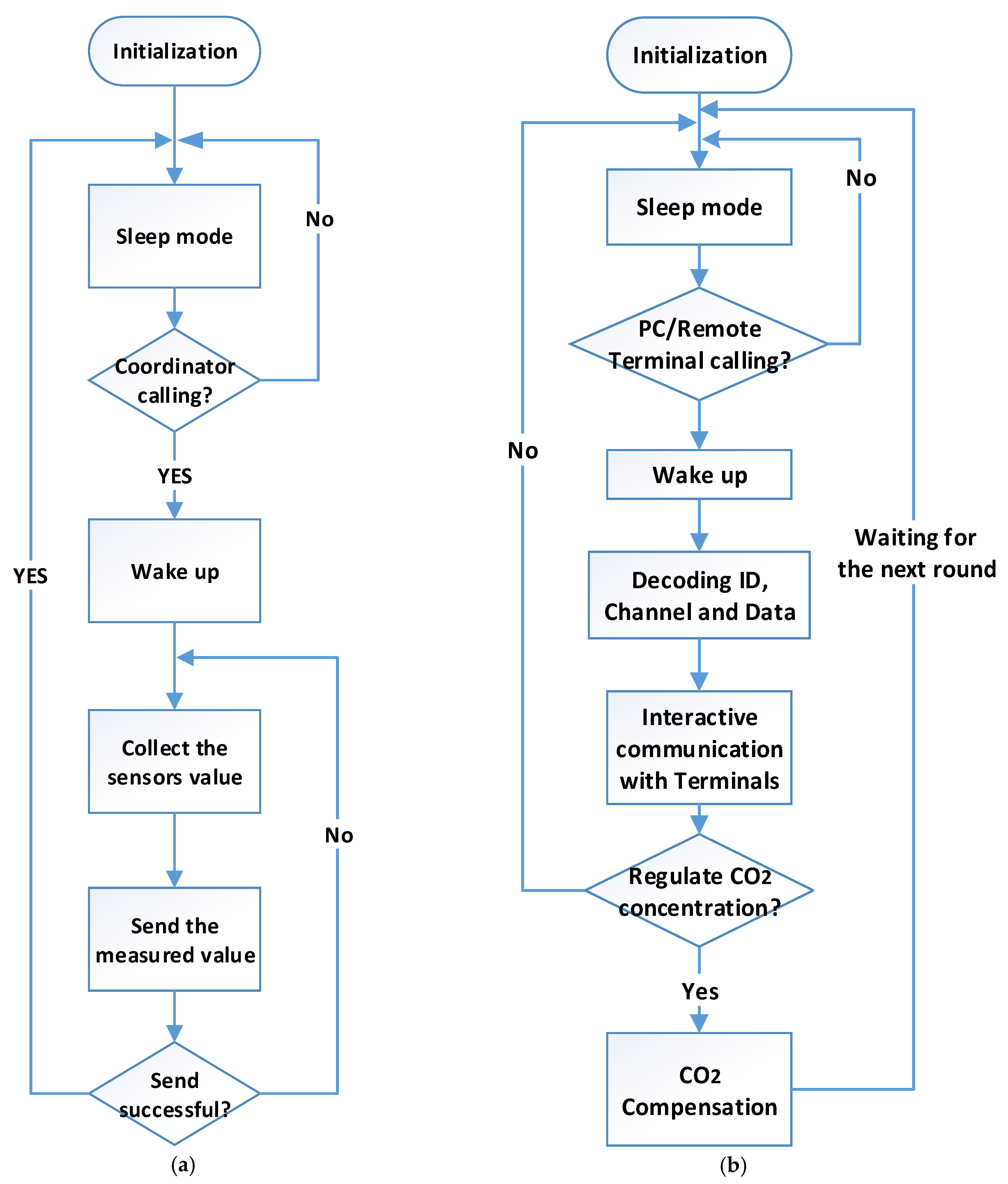
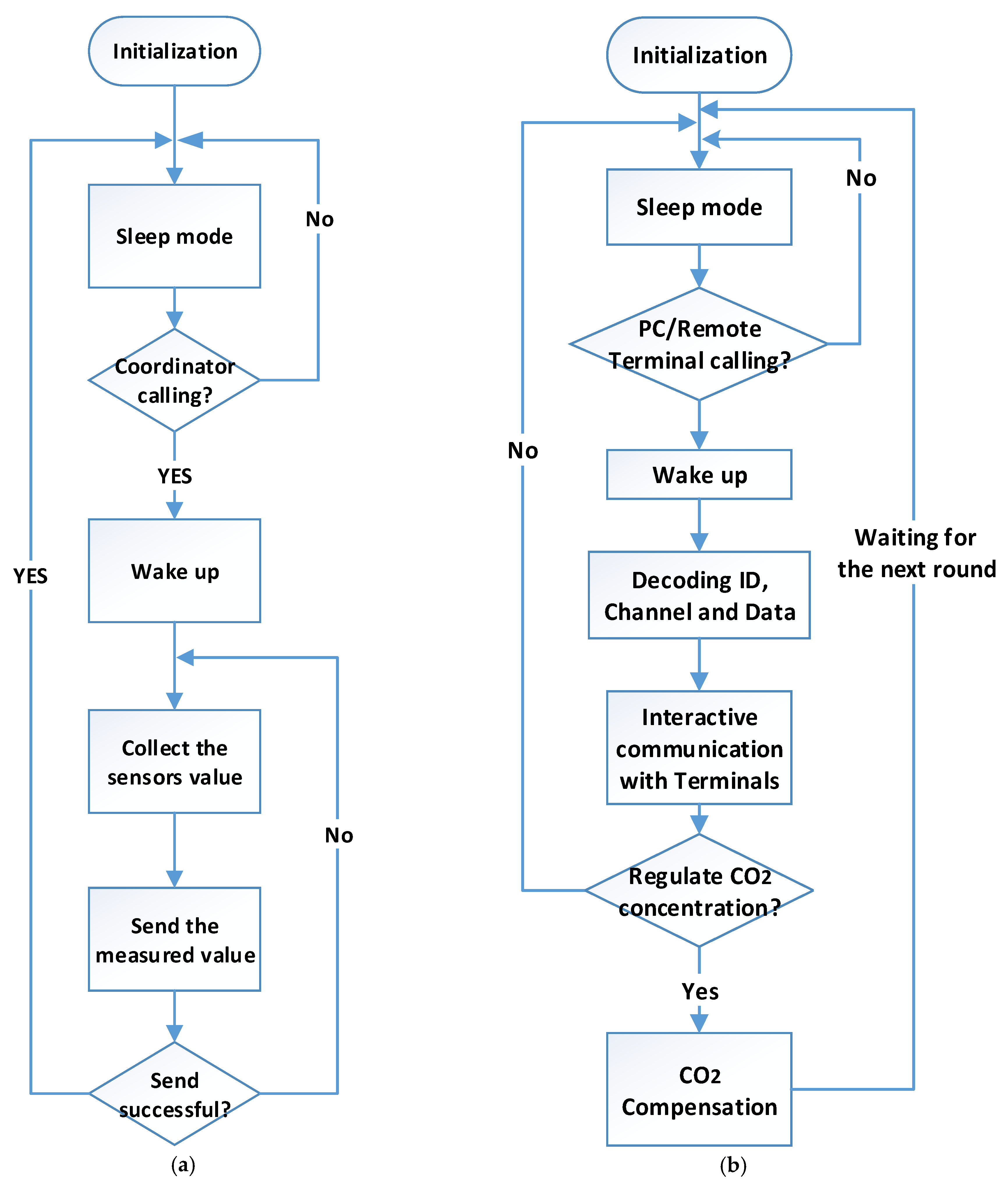
The detailed communication process is shown in
Figure 3. In most cases, the sensor nodes are kept in listening mode, waiting for the call from the coordinator, to save power, except for special real-time monitoring required conditions. With a received command, such as data measurement and transmission power adjustment, a sensor node should complete it, and then sleep again, as shown in
Figure 3a. However, the coordinator node does not collect the environmental information directly and only acts as a transmission part to coordinate the data transmission between the terminal PC and sensor nodes. The related control command is also transmitted through the coordinator node as shown in
Figure 3b.
The data measured by sensor nodes were collected by the coordinator node as the input of the software platform. The control parameters determined by the related algorithm was transmitted to the controller facility to regulate the CO2 concentration. Then, the regulated CO2 concentration was measured by the sensor nodes again as the second round input. The interval of this closed-loop process was adjustable according to practical requirements. A short period indicates a relative timely feedback and accurate CO2 concentration regulation. As a comparison, a long period is able to decrease the power consumption. The trade-off between the control performance and power consumption should be taken into account according to large amounts of historical data and special requests of managers.
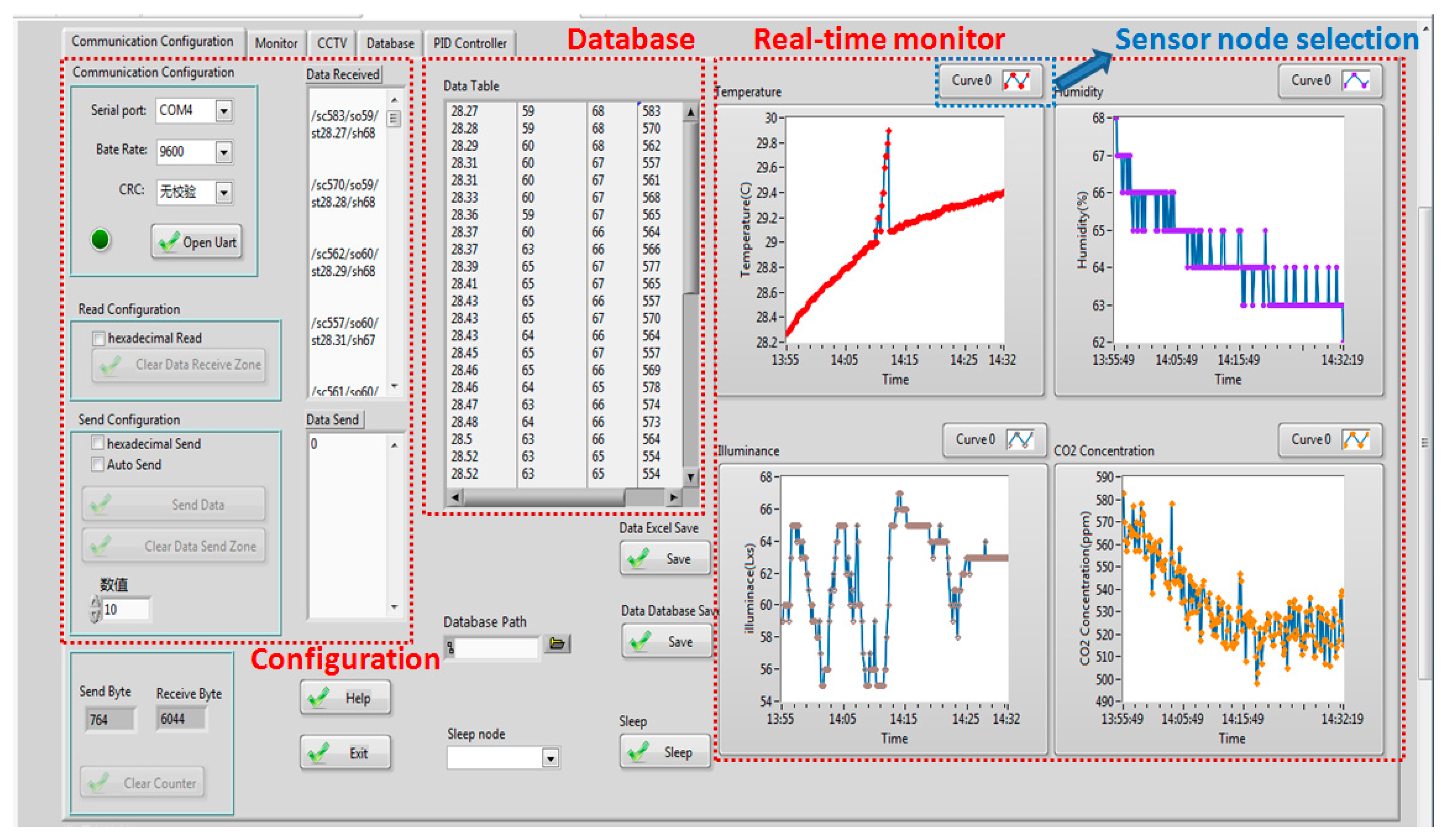
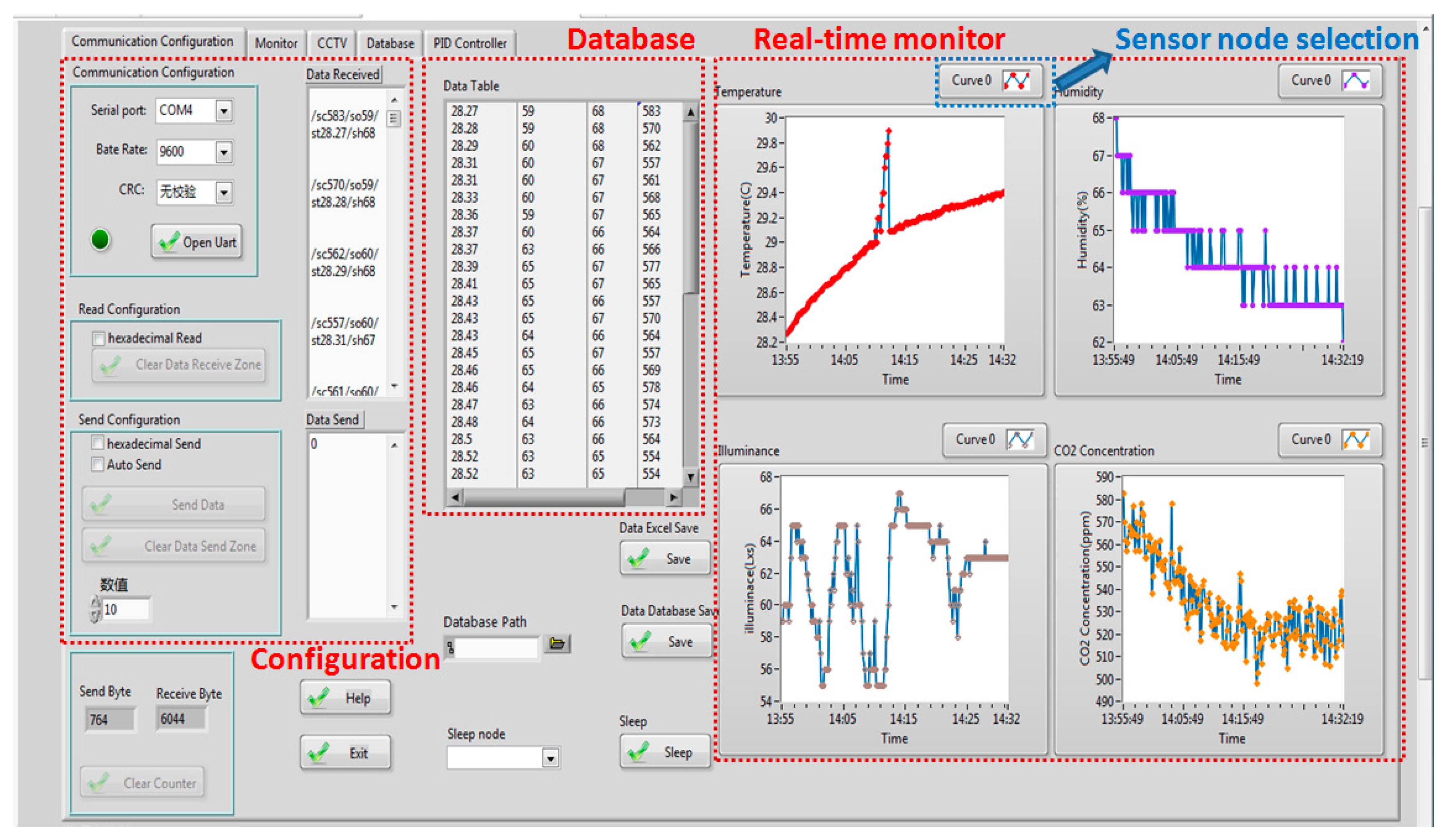
2.4. GUI Interface Based on LabVIEW
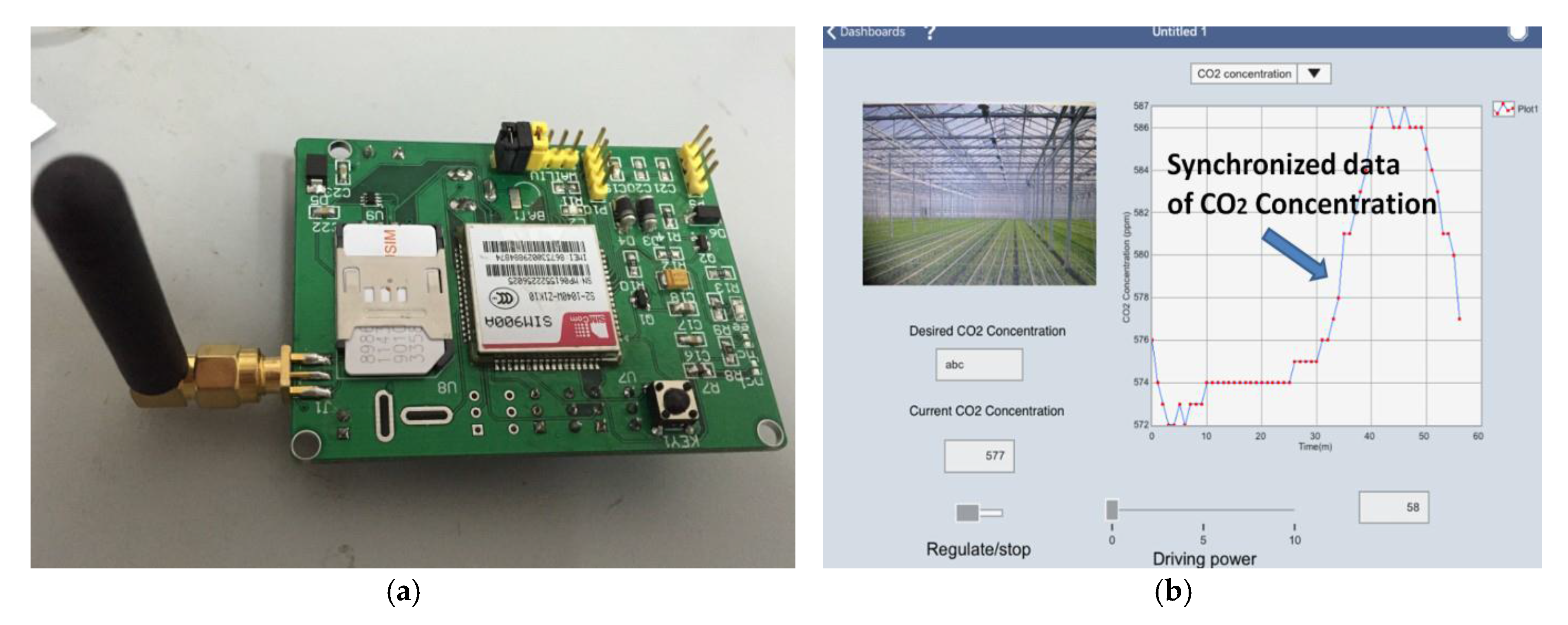
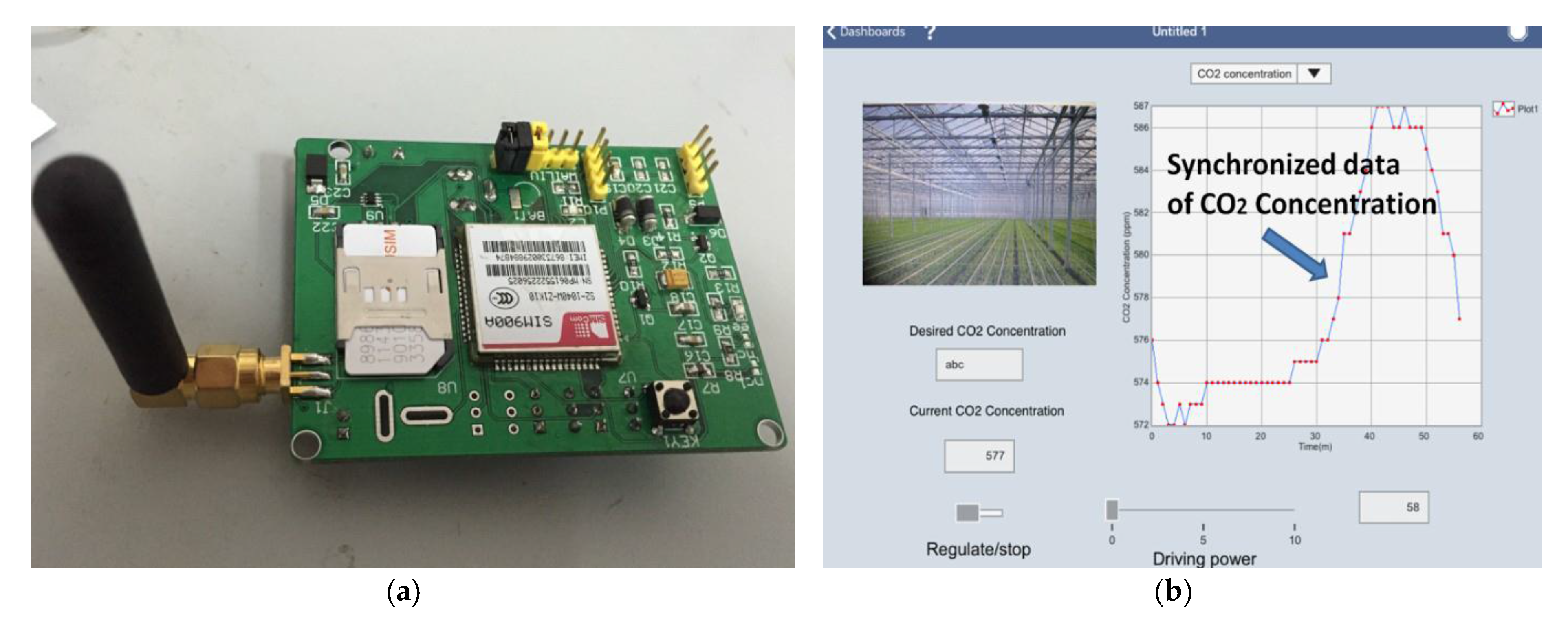
The interface platform was developed based on LabVIEW, which includes four main parts, including communication configuration, monitor, database, and dynamic Fuzzy-PID control. The communication configuration part realizes the configuration of the closed-loop bidirectional data transmission and the distribution of data cache. The received data and the recent variation trend will be displayed as the classified environmental factors in the monitor part. The link between a Structured Query Language (SQL) database and LabVIEW format is used to record the collected environmental information. The dynamic Fuzzy-PID controller is responsible for the whole operations, especially the CO2 concentration regulation. Besides the real-time CO2 concentration, the related environmental factors, such as luminance, temperature, and plant growth stage, are used to determine the dynamic Fuzzy-PID parameters for optimizing the regulation performance. In addition, the utilization of libraries in data-sharing realizes the function of remote monitoring and control. Both the browser and a Personal Digital Assistant (PDA) can act as remote terminals. Supported by GSM (core chip is SM900A, SIMCom, Shang Hai, China), the message is decoded as a mobile Attention (AT) instruction set and sent to a mobile for information broadcasting.
2.5. Fuzzy-PID Control
PID is a common method in engineering, and is the most widely used regulator control method and has a slight dependence on the accuracy of digital parameters. When the characteristics of the objects to be controlled are complicated and relatively non-linear or time-varying, the inappropriate parameter adjustment may cause oscillation in the system control. Compared with the traditional PID control, Fuzzy-PID controller has a relatively weak dependency on environmental factors, which is applicable in a complicated circumstance such as in a greenhouse. Based on the fuzzy logic principle [
24], in most cases, a Fuzzy logic controller (FLC) shows a satisfying response capability for a non-linear system. The typical characteristic of an FLC is its incapability to generalize and only supply the response according to the existing rules. In this process, an expert in determining the inference logical rules can realize the function as a computation of desiring control value [
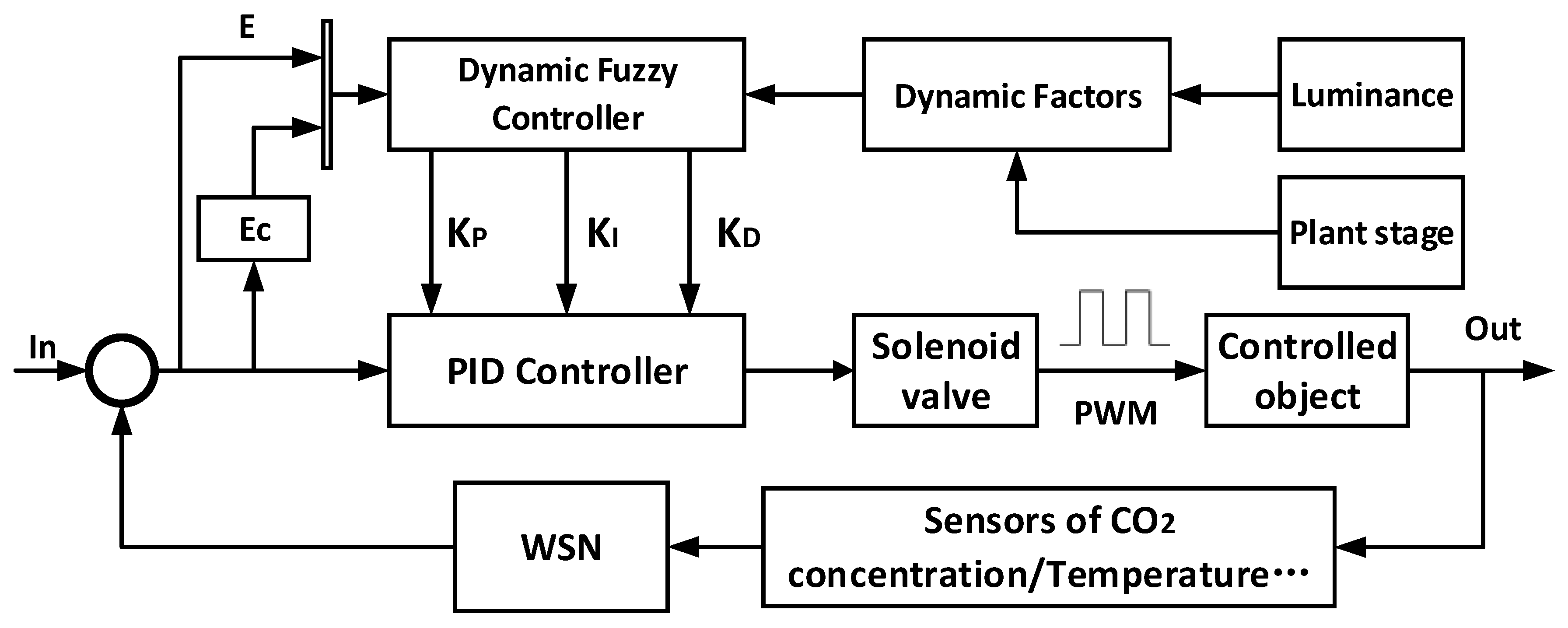
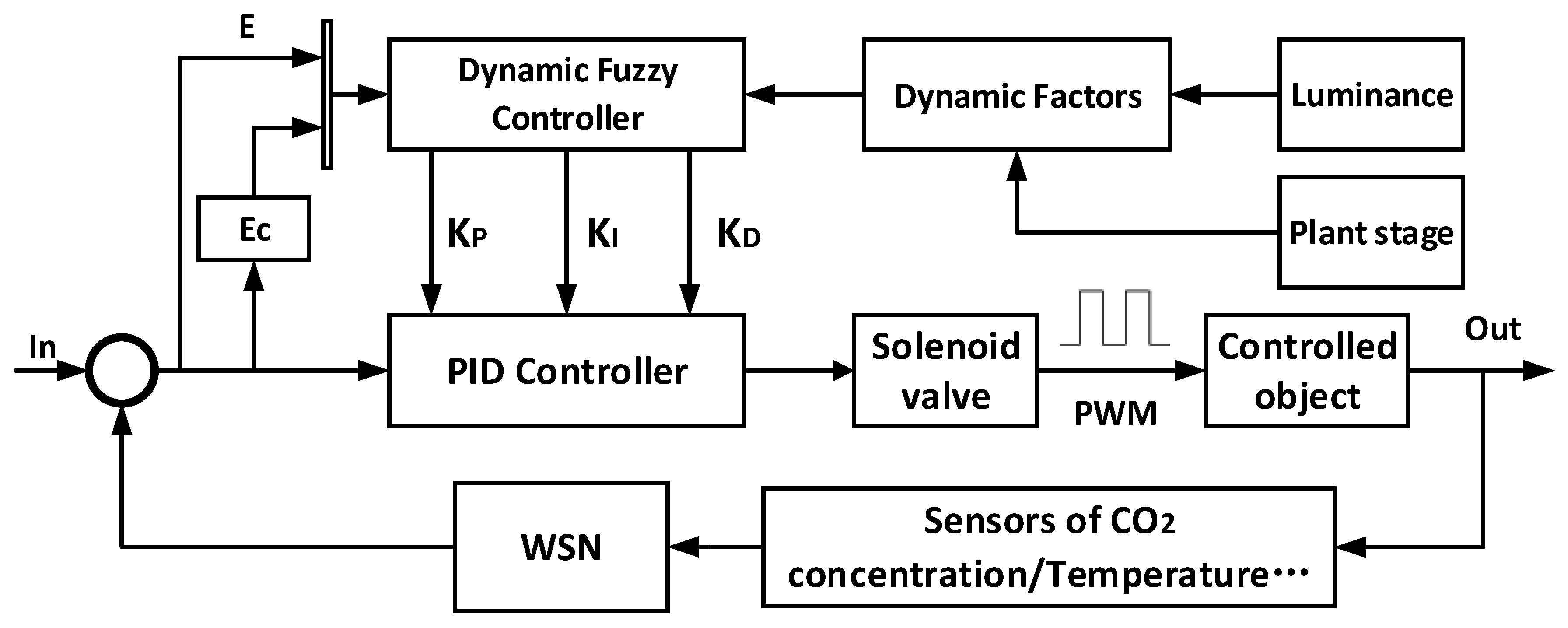
25]. In practical application, in consideration of the relative data from the monitoring system for control purposes, an FLC is defined by a set of linguistic rules and fuzzy sets to compute the reasonable value for a greenhouse actuator. The actuator is the electromagnetic valve for relative regulation of CO
2 concentration in this paper, as shown in
Figure 4. The monitoring sensor nodes collect the required input factors and send them to the FLC. The FLC derive the required PWM driving signal for the valve to control the CO
2 concentration. As the Fuzzy rules, a multiple inputs and multiple outputs (MIMO) are used in this system to regulate the CO
2 concentration.
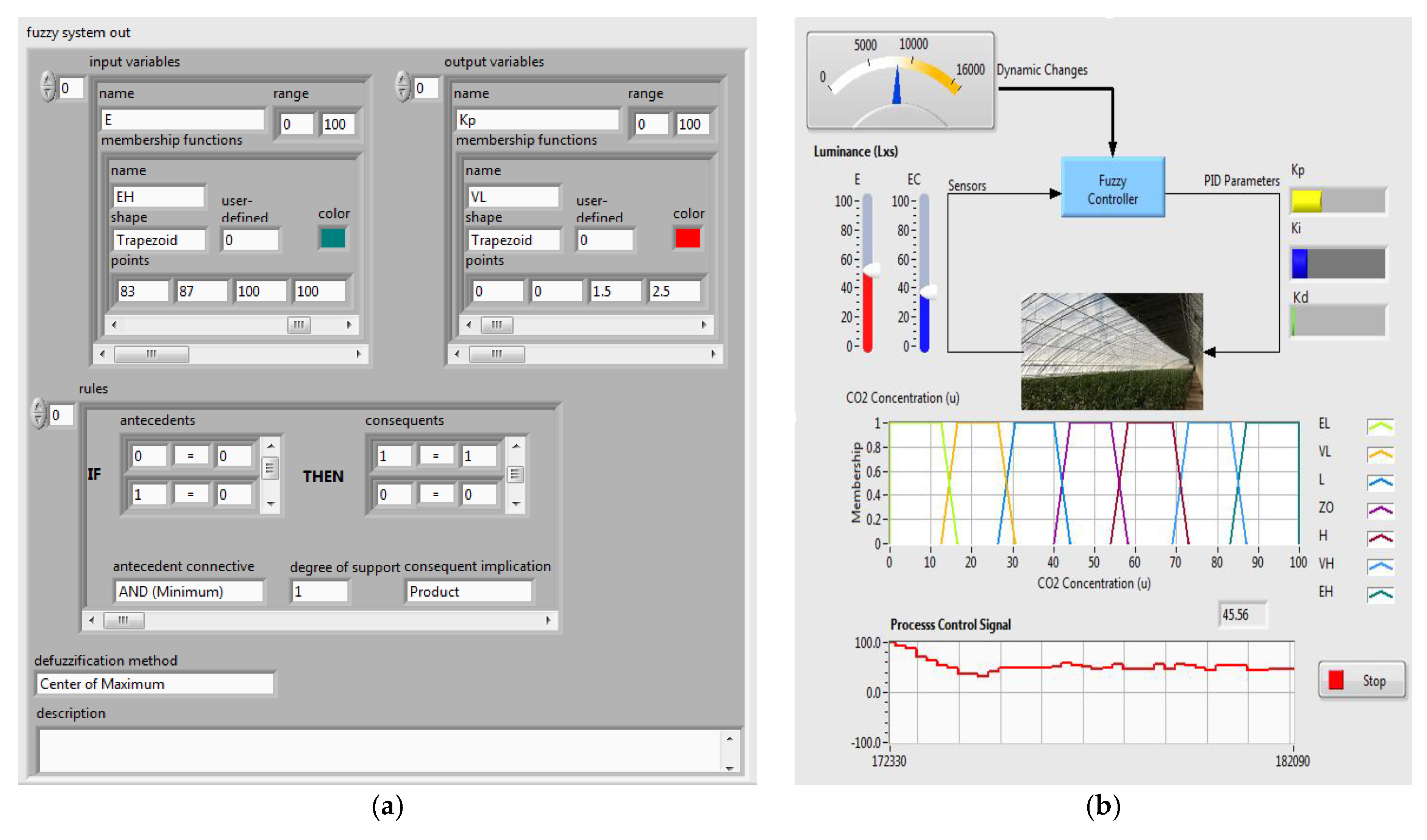
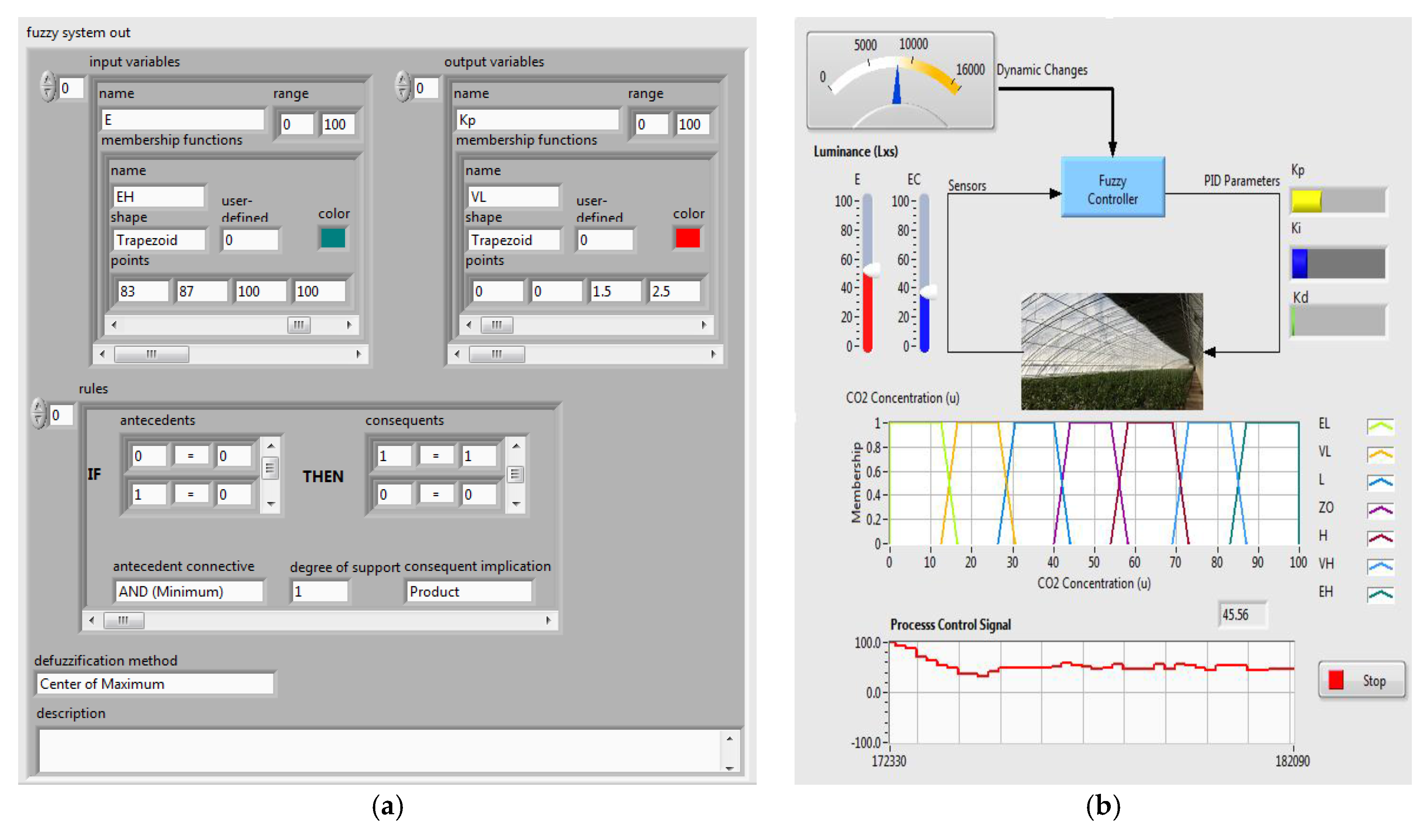
As shown in
Figure 4, the multiple inputs come from the monitoring sensors, and the multiple outputs supply the required parameters for the following PID control. There are two inputs of the FLC, i.e., CO
2 concentration error (
E) and changing rate of error (
Ec). The outputs of the FLC are the required parameters,
KP,
KI and
KD, for PID controllers. After the second calculation by the PID controller, the output value is set to the range from 1 to 100, which corresponds to the driving frequency of the actuator.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}