1. Introduction
Robots and robotic devices are continuously improving and speeding up steps in our life, by becoming more ubiquitous and present both in the workplace, and in other daily activities. As the integration progress is becoming more popular, additional precautions have to be taken into account in order to ensure safety for the humans and objects that surround the robot. The common approach that separates humans and robots using protective cages is no longer adequate, especially when future scenarios where a close collaboration between the robot and its human operator are considered. Consequently, it is important to provide solutions that implement sensing capabilities to robots in order to collect information about the surroundings and thus plan safemotion-paths that avoid static and moving objects and—in case of imminent collision—minimise the damages by performing an avoidance manoeuvre or gently stopping its action. Besides safety, the interaction itself is another important aspect that should be taken into account. Tactile and haptic feedback from humans can be a useful additional and more direct channel of communication that can result in a more natural and understandable interaction method. In fact, information provided by touch is important for humans, since from those it is possible to extract valuable data that can help to understand the meaning of the interaction itself. Having such capabilities will help in the development of the next generations of robots capable to interact not only with humans but also with other robots in a smoother way.
The field of artificial sensing is very promising; for this reason, in the last 30 years [
1], many researchers made it the focus of their work. Particular interest has been placed on the problem of grasping control with robotic hands [
2]. With the growth of interest in humanoid and companion robots, many researchers started to investigate on large scale robotic sensing [
3] in order to provide full-body scale sensing to these machines. Even if many solutions have been developed in the last years, tactile sensing is a very challenging problem, and it involves several engineering issues that often require special processing equipment. In addition, there are fundamental technological difficulties that limit the direct transition from the development of a single working sensor to a more complex network of sensors that is spread over large surfaces. However, different solutions that tackle and try to overcome the problem can be found in the literature. These arrays of sensors—commonly referred to as
artificial skins—consist of a group of distributed sensors that are connected together in order to provide information over the sensing area. The sensor network is usually considered large (i.e., able to completely cover a wide portion of the robotic device) and able to conform over different 3D shapes—including curved and mobile parts—for which it was designed.
In order to replicate the capabilities of human skin, a diversity of sensing principles have been adopted in the development of the single sensing elements composing an artificial skin [
4]. These, used alone or in combination with others, allowed the development of artificial skins capable of distinguishing between different phenomena, such as pressure, vibration, and temperature. Regarding tactile sensing, the main transduction methods identified so far belong to the following classes: resistive, capacitive, piezoelectric, magnetic, optical, and ultrasonic. Among these, capacitive sensing has gained importance, especially in consumer electronics. The technology has excellent sensitivity, good spatial resolution, and large dynamic range. Capacitive sensors are very susceptible to noise, however (especially over large surfaces), they suffer from stray capacitance, and the measurement system can become complicated as the size of the sensor grows. Similarly, resistive sensors (e.g., piezo-resistive, and strain gauges) are among the most-used technology; their success is due to their low cost, and their high spatial and temporal sensitivity. The weakness of the technique lie in the low repeatability rate, high hysteresis (especially for piezo-resistive sensors), and noise sensitivity. All of these weaknesses can limit the application of resistivity-based sensors. Ultrasonic sensing—i.e., using resonant properties as a means of detecting changes over the domain—has the major advantage of using simple circuitry: a vibration speaker and a piezo-electric microphone. The technique provides developers with the possibilitiy of flexible design, and does not use conductive or magnetic components. This makes it safe for direct interaction and it is non-susceptible to electromagnetic interference. However, even if used in combination with a material that efficiently conducts vibration, it is dumped in function with the distance from the source. Thus, if the artificial skin is large, the sensitive area is limited to a small region between the speaker and microphone. Other limitations are related to the material, shape, and ambient noise. Optoelectronics are also a good candidate for pressure sensors. The technique allows the development of (semi-)transparent devices that are fast in response, have good sensing capabilities with good repeatability and reliability, and are immune to electromagnetic fields. However, the need of large external hardware makes this technology difficult to be used.
An additional shared disadvantage among the presented transducing mechanisms is the need for wires to connect the different sensing units that are part of the network. The use of a large number of distributed wires not only forms an excellent antenna for electromagnetic noise, but also reduces the mobility of the robot by making it more bulky in order to contain all the components. This issue is especially crucial in the field of soft robotics [
5,
6], where robots not only move more naturally by mimicking biological systems, but are also made of material (e.g., silicon rubber) that can deform and easily adapt to different situations. These novel technologies have more demands than more traditional robotic platforms, since it is fundamental to maintain their
soft properties in order to be advantageous. The use of this paradigm will open a new path for the development of novel robotic systems that are intrinsically compliant and safer in case of accidental collision of the robot with a human. Sensors (or artificial skins) for these types of robots should be flexible and able to follow the changes undergoing in the robot structure, while maintaining sensing capabilities—even under large deformations.
Among the various approaches that can be used in such contexts, the one we found the most promising is the use of a tomographic technique known as Electrical Impedance Tomography. In this technique, a small current is injected into a conductive domain, and electric potentials are then measured around the boundaries in order to infer the internal structure of the domain. Approaches that use this technique are not new, and they have been used in different application domains, spanning from geophysical inspection [
7,
8] to biomedical measurements [
9,
10], and recently, robotic applications [
11,
12]. In all of these applications, Electrical Impedance Tomography has been used to localise areas of inhomogeneity within the domain caused by the presence of elements that change the domain conductivity. If applied to a stretchable conductive substrate (as in [
13,
14,
15,
16,
17]), the technique can be used to develop a flexible sensor with arbitrary size and shape that does not suffer from the presence of wires within the sensing area. Even if it sounds promising, the technique has some drawbacks, especially related to spatial resolution.
By exploiting this sensing technique, the aim of this paper is to investigate and present a low-cost wearable sensor that is able to adapt to different surfaces and still provide information, even when deformed. This sensor can be promising in the field of soft robotics where current solutions cannot be used for scalability issue and the presence of stiff components. Considering this research domain and all the related problems, our contribution is the development of a sensor, in the form of a smart skin that can adapt its shape to the underlying structure and return information even when both the skin and the structure change shape. Compared to the current EIT-based smart skins, the sensor differ in the material used for its development and the application field. Our sensor is small in size, so the circuitry and the cable assemble that compose the whole electronics do not interfere in the morphological changes of the device where it is embedded, and modular in order to adapt to different situations.
We tested our system in different scenarios, and it proved to be as effective as the state of the art in this field. The paper is structured as follows: in
Section 2, the technology used and the working principles that lay beneath it are described.
Section 3 presents the experimental setup and protocol used to gather and analyse the data from each experiment.
Section 4 and
Section 5 present the results and the discussion according to what has been found. The last Section is left for the conclusions and future works.
2. Material and Methods
2.1. Electrical Impedance Tomography
Electrical Impedance Tomography (EIT) [
18] is an established imaging technique used to reconstruct the internal structure of a domain by estimating its conductivity distribution, derived as a result of applying different patterns of electrical current and measurements of electric potentials. EIT was initially introduced to retrieve the internal admittance of a conductive body in [
19,
20], respectively, in the field of medical and geophysical exploration. Its first clinical use was related to the identification of the different tissues inside a human chest. This was made possible by using an array of 100 electrodes placed on one side of the chest, and a single electrode earthed on the other side. Shortly after, the first clinical impedance tomography system was developed in the Department of Medical Physics in Sheffield, UK. The system has been used to perform different clinical studies, and it is still in use in many centres today for imaging lung ventilation, cardiac function, gastric emptying, brain function and pathology, and screening for breast cancer. EIT imaging has not only been used in clinical applications; from its early stages, it was also being used in geophysical analysis, and more recently in industrial applications (e.g., pipe inspection, or fracture detection in structures), and in robotics.
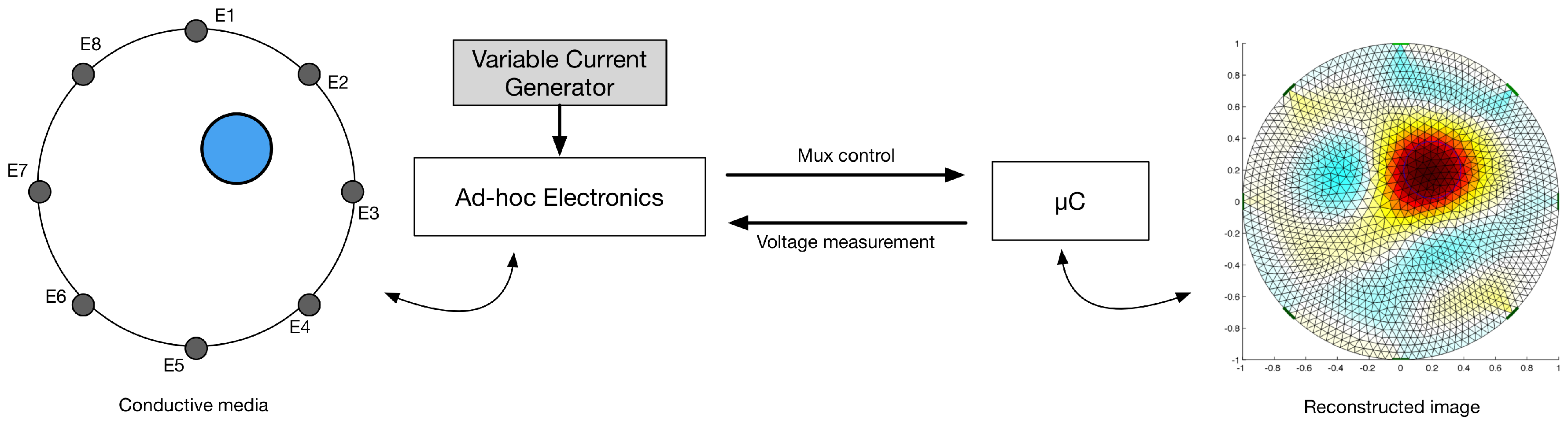
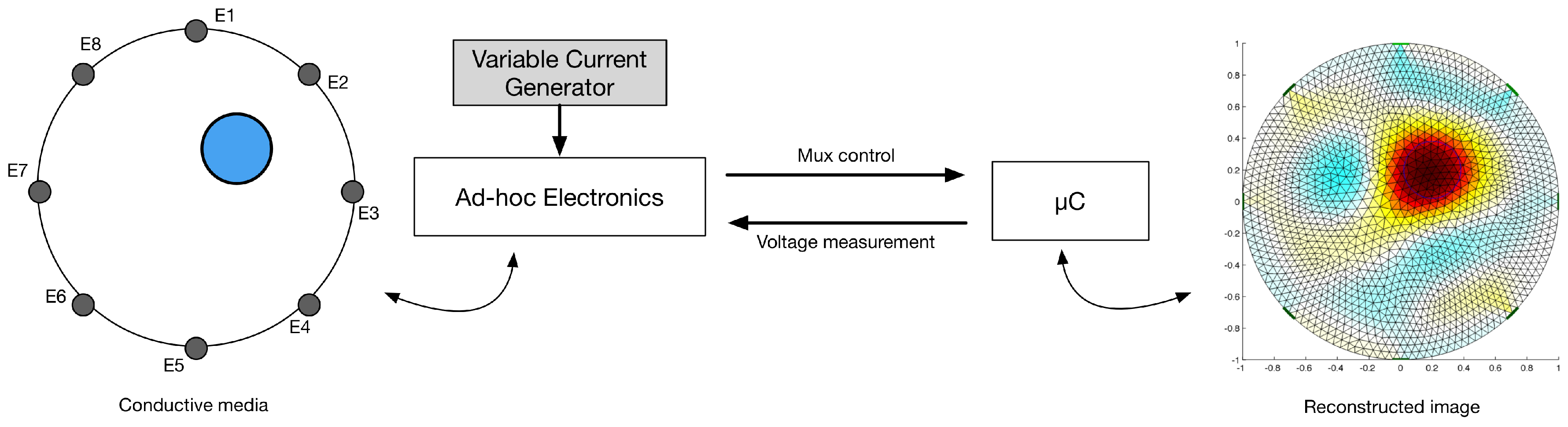
In a typical EIT application, one or more arrays of electrodes are equally placed at the boundaries of a conductive body. At every step of the measurement process, among these electrodes, two are selected to be used to inject electrical current into the domain (driving electrodes), while all the others (measurement electrodes) are used to acquire the electric potentials—measured with respect to a common ground—which is generated at the boundaries of the domain. According to the geometry of the studied domain, number and position of the electrodes it is possible to define specific injection/measuring patterns in order to reconstruct the internal conductivity of the studied domain.
From a mathematical point of view, EIT consists of solving a forward and an associated inverse problem [
21]. In the forward case, the electric potentials at the boundaries of the considered domain are estimated by assuming a known uniform conductivity of the domain and the value of the injected current. A common approach to dealing with these pieces of information is to describe the real shape of the domain using Finite Element Analysis (FEM), in which the continuous form of the current propagation problem is transformed into a discrete approximation. The estimated values are then compared with the measured ones to update the model with the correct conductivity value. The updated model is then used as reference to solve the associated inverse problem. Solving such a problem is not straightforward, since it is non-linear and ill-posed [
22]. Common approaches to overcoming this kind of numerical issue consist of adding prior information about the domain to the model, using regularisation over the data in order to obtain a nearly well-posed problem that can be solved, and implementing an iterative algorithm that can provide an approximate solution.
As mentioned earlier, the use of EIT has several potential advantages when compared to other tomographic techniques. Most importantly, the technique itself can be considered safe in many applications, since it is non-invasive, and does not use ionising radiation. Furthermore, most of the developed systems are non-cumbersome (making them highly portable) and of reasonable manufacturing cost. However, there are also potential disadvantages. Among these, the most prominent is the relatively low spatial resolution which precludes the use of the technique to obtain precise morphological information as opposed to other tomographic techniques. Spatial resolution depends on various parameters and can be improved by increasing the number of electrodes [
23,
24] used with the drawback of an increase of the acquisition time. Another technical issue is associated with the fixed placement of electrodes; this is crucial in media that can be deformed or that can change their shape.
2.2. Reconstruction Process
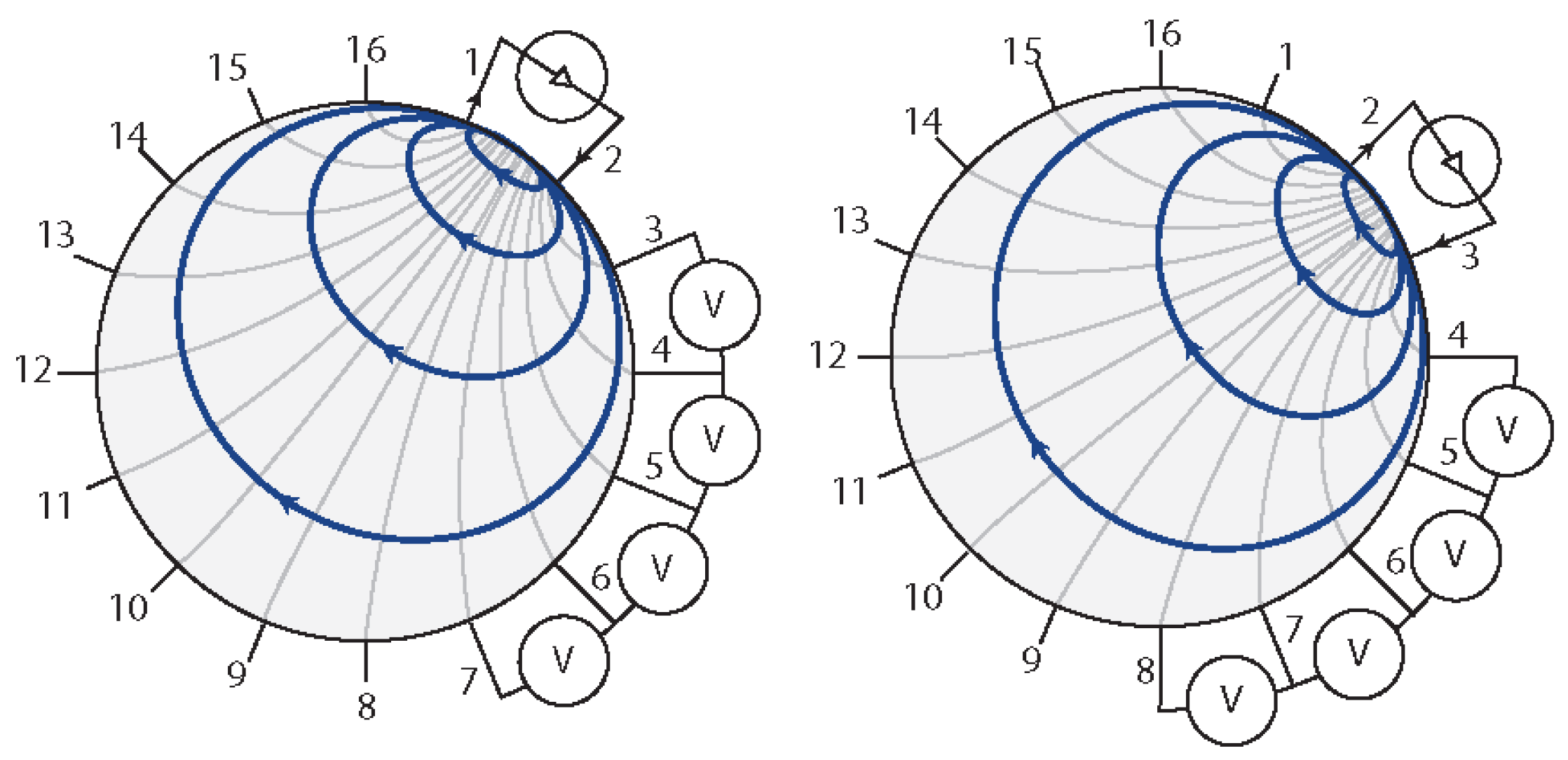
A key component in the reconstruction process consists of the selection of the most appropriate sequence of injection and measurement patterns. These are strongly dependent on the application, noise level in the measurements, the geometry of the domain, and the electrode placement. A pattern consists of sequences of numbers that—at every step of the acquisition process—identify which of the electrodes act as the current source, the current sink, or are used to measure the electric potential. As a general practice, a pattern is designed to use every single electrode in at least one of its possible configurations.
It is possible to classify the most-used patterns according to the number of current sources that are used in the injection part:
bipolar patterns [
18] use only one source, while
optimal patterns [
25,
26] use multiple independent sources. The classification can be further refined by considering the relative position of the electrodes or the relationship between the electrical currents that are injected. Despite their name, optimal patterns are not the most-used ones. In fact, such patterns require a careful pre-tuning of the system, since the injected current cannot be obtained analytically. In addition, they are less tolerant to noise, to the electrode position and their contact impedance, and to the correct modelling of the forward problem. These patterns have the potential to produce more accurate images than the ones returned by the bipolar pattern. Bipolar patterns, on the contrary, are less prone to modelling error; thus, it is possible to use them in different situations. This peculiar property—in addition to the hardware simplification brought by the use of a single current source—makes bipolar patters the most used for EIT applications. Among these,
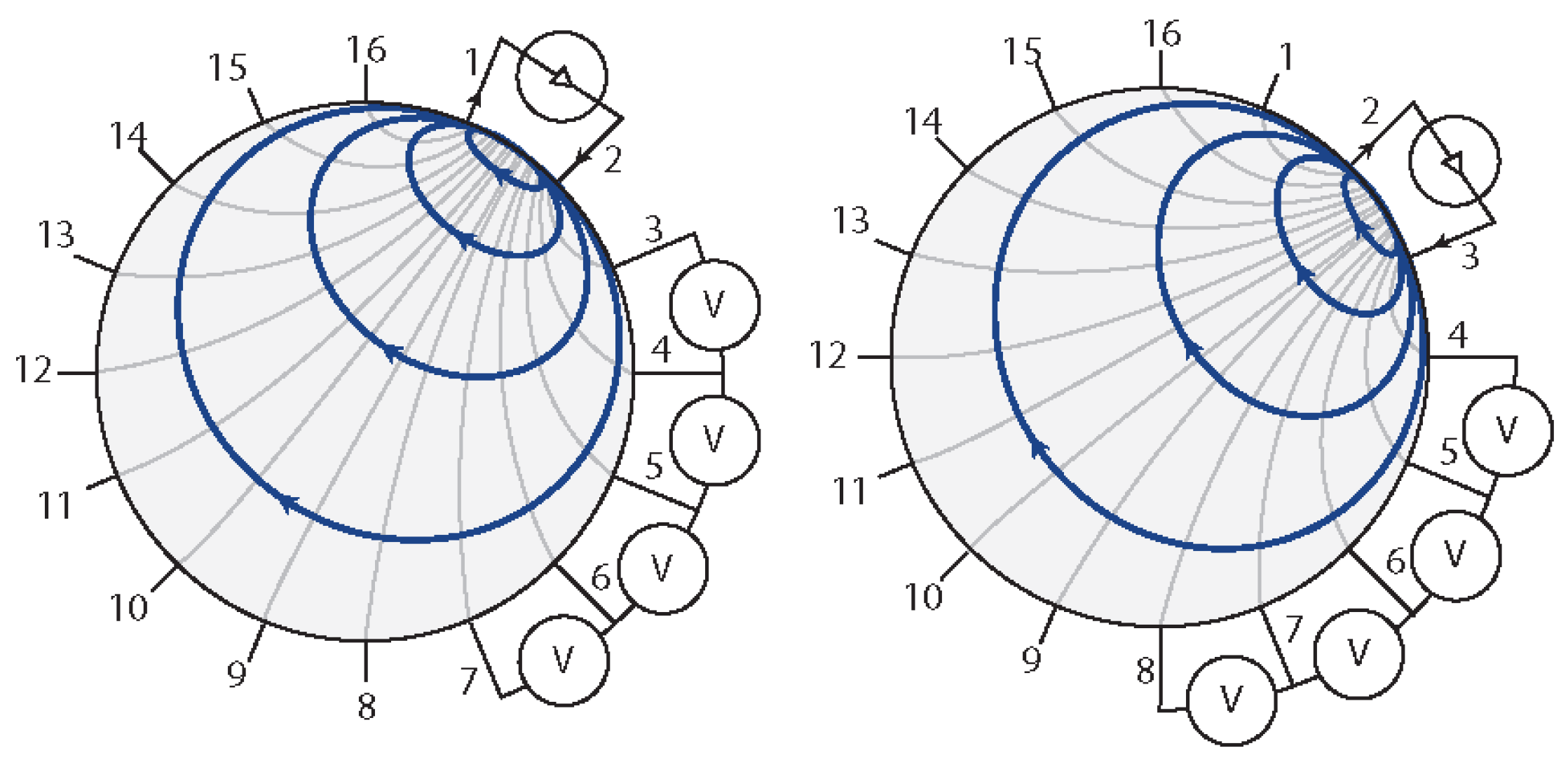
adjacent [
27] patterns are the most popular and easy to implement. These patterns use a pair of adjoining electrodes, both in the current injection and for the electric potential measurements. An example of a typical measurement sequence is depicted in
Figure 1.
Once a full cycle of measurements has been performed, the electric potentials are then processed by an inverse problem solver algorithm to reconstruct the internal structure of the studied domain. An initial practical method used for this purpose was a non-iterative linear method known as back-projection [
28]. The method is fast and is commonly used in various tomographic imaging techniques, such as X-ray scans. By the use of this approach, the equipotential volume between a pair of electrodes is back-projected along the whole boundary of the body. By combining all the projections, it is possible to estimate the position of the different conductive regions within the domain. While back-projection is conceptually simple, it does not correctly solve the EIT problem, since the current does not move in a straight line (i.e., differently from X-rays), but floods a region from source to drain. An example is given by the iso-potential lines shown in
Figure 1. As a consequence, the reconstructed image results are blurred with some clear artefacts. In addition, when higher dimensions than 2D are considered, the technique suffers from additional limitations. For this reason, different novel approaches have been implemented. These consist of the use of deterministic algorithms based on the computation of the Jacobian—the linearised mapping between the boundary electric potential and the internal conductivity—of the discrete forward solution. The use of such algorithms allows for more precise solutions, even for higher-dimensional domains. Two practical approaches to reconstructing the inhomogeneity map are: (i) using static imaging; (ii) or using dynamic imaging. In static imaging, the absolute value of the conductivity distribution is reconstructed using an iterative approach. This method is extremely sensitive to uncertainty in electrode position, and it is generally slow, since at every step of the iteration, the FEM model has to be updated with the acquired measured data. The dynamic imaging approach, on the contrary, uses non-iterative one-step algorithms to reconstruct the differences in the conductivities between the two time frames. This is done by comparing a reference measurement—where homogeneous conductivity all over the domain is assumed—with later ones. Since the comparison is performed only on the changes in electric potentials, the method is fast, and it allows possible problems due to unknown contact impedance between electrodes and the measured media or problems related to incorrect positioning of the electrodes to be overcome. In both approaches, it is common practice to pre-condition the system using a regularisation method. This allows movement from an ill-posed problem to a similar well-posed one by attenuating the distribution of the null values in the matrices that are the cause of numerical instability.
Initial tests for the reconstruction process were performed using an open-source Matlab toolbox—Electrical Impedance Tomography and Diffuse Optical Tomography Reconstruction Software (EIDORS [
29]). In order to provide more direct control of the parameters of the inverse solver algorithm, and to interface it with the acquisition system, we designed and implemented a modified version of the Matlab toolbox.
2.3. Electronics
According to the type of pattern an EIT system can handle, these are designed to implement one or more electrical current generators to create time-harmonic Alternating Current (AC) signals that are further modulated and tuned according to the application domain and the studied media. Although it is also possible to inject voltage and measure current, electric potential measurement is a more common practice; this is mostly because of the effects of the contact impedance between the electrodes and the conductive domain. These effects are significantly reduced by the large input impedance characteristics of voltmeters as compared to the low input impedance of ammeters. In addition, the hardware required to precisely measure the generated current requires high-cost components that have to be finely tuned in order to provide reliable measurements. As an alternative to AC currents, it is possible to use Direct Current (DC). The use of the latter is more convenient, since it allows to simplify the hardware required to both generate the electrical current and to read-out the measurements. In addition, the analysis result is simplified, since only the resistive component, and not the permittivity, is measured.
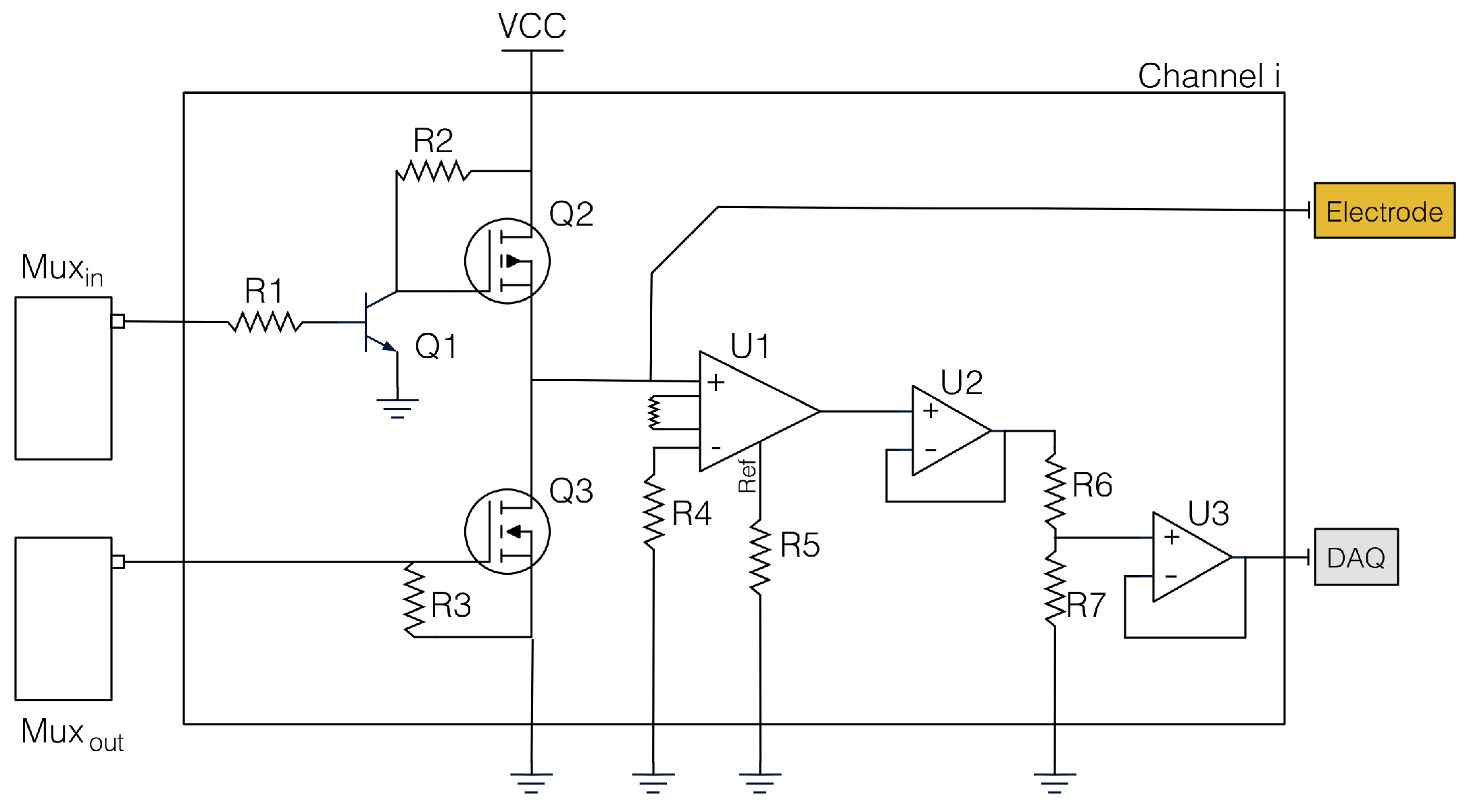
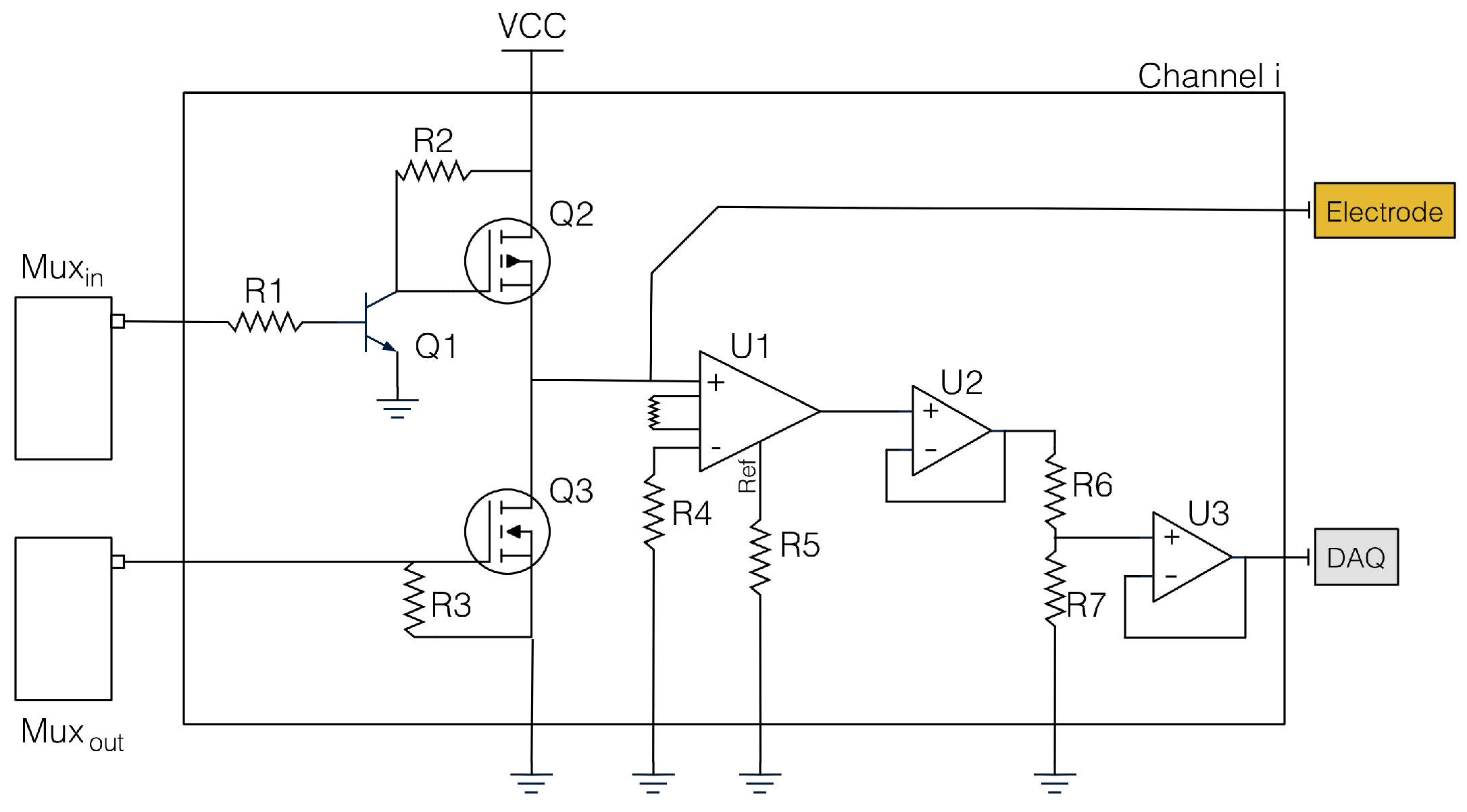
Starting from these considerations, we designed a simplified version of a commercial EIT system to be used as main component of our sensing unit. The main focus was placed on developing a low-cost adaptable system that is able to perform measurements by applying different patterns, and which is powered by a DC source. The use of DC current simplifies the hardware requirements, and allows the use of the developed hardware in battery-driven applications. The electronic system is composed of two main components printed on two separate printable circuit boards (PCBs): a voltage-to-current generator, and a driving/read-out circuit.
Figure 2 shows a schematic representation of the driving and readout electronics for a given channel.
The current generator is implemented by a voltage regulator (Texas Instruments LM317 ) set up as precision current-limiter circuit. The output current value is controlled by a variable resistor, and it can be adjusted linearly by changing the resistor value. In order to provide a constant current supply on varying load, a 12 V voltage source is used as the input to the voltage regulator. The electrical current is then multiplexed across the different channels by the driving/read-out electronics.
Each channel in the driving/read-out electronics is designed to operate at three independent stages. To provide such capability, we implemented it as a half H-bridge, where a n-MOSFET (International Rectifier IRLML6344TR) and a p-MOSFET (International Rectifier IRLML9301TR) act as two independent switches connected to the same path. In this configuration, the p-MOSFET is connected to the positive source, and the n-MOSFET to the ground. By opportunely turning on and off the single switch, it is possible to set each channel to act as current source, current sink, or setting it to its high-impedance state, in which the channel can be used to measure the voltage. As initial choice, the control of the driving/read-out electronics was performed directly by the microcontroller. In order to reduce the number of cables and add modularity to the system, we moved to an integrated solution that uses two independent de-multiplexers (Texas Instruments CD74HC237M). To capture the smaller voltage variation, we added an amplification stage to each channel. It consists of a low-power general-purpose instrumentation amplifier (Texas Instruments INA118) with variable gain. The output of this initial stage is referred to as the ground. The signal then passes trough two subsequent op-amp (respectively, Texas Instruments OPA827 and TLV2371), both configured in a non-inverting gain configuration.
The driving/read-out electronics used in this paper has eight independent channels. However, the system has been designed to be modular to easily adapt its use to different requirements. Each channel is connected to the object under study by a single-ended cable that has an alligator clip or a with push button at its extremity. The acquired signal is routed toward an analogue pin of the micro-controller (Atmel ATmega2560). Since each channel is measured independently, it is possible to perform any possible pattern combinations either at run-time or in post-processing. It is worth mentioning that in the current version of the acquisition system, no further processing of the signal (e.g., noise filtering or signal conditioning) has been performed.
2.4. Sensor Fabrication
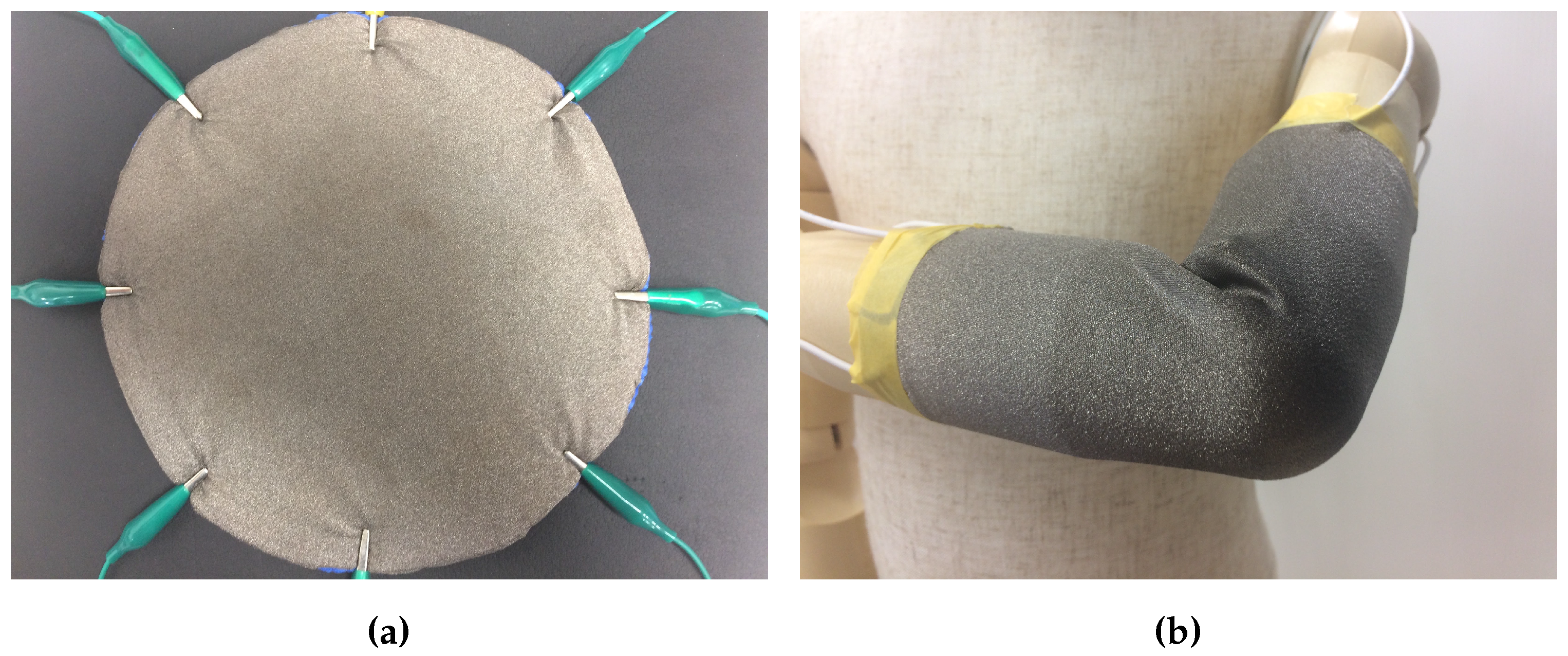
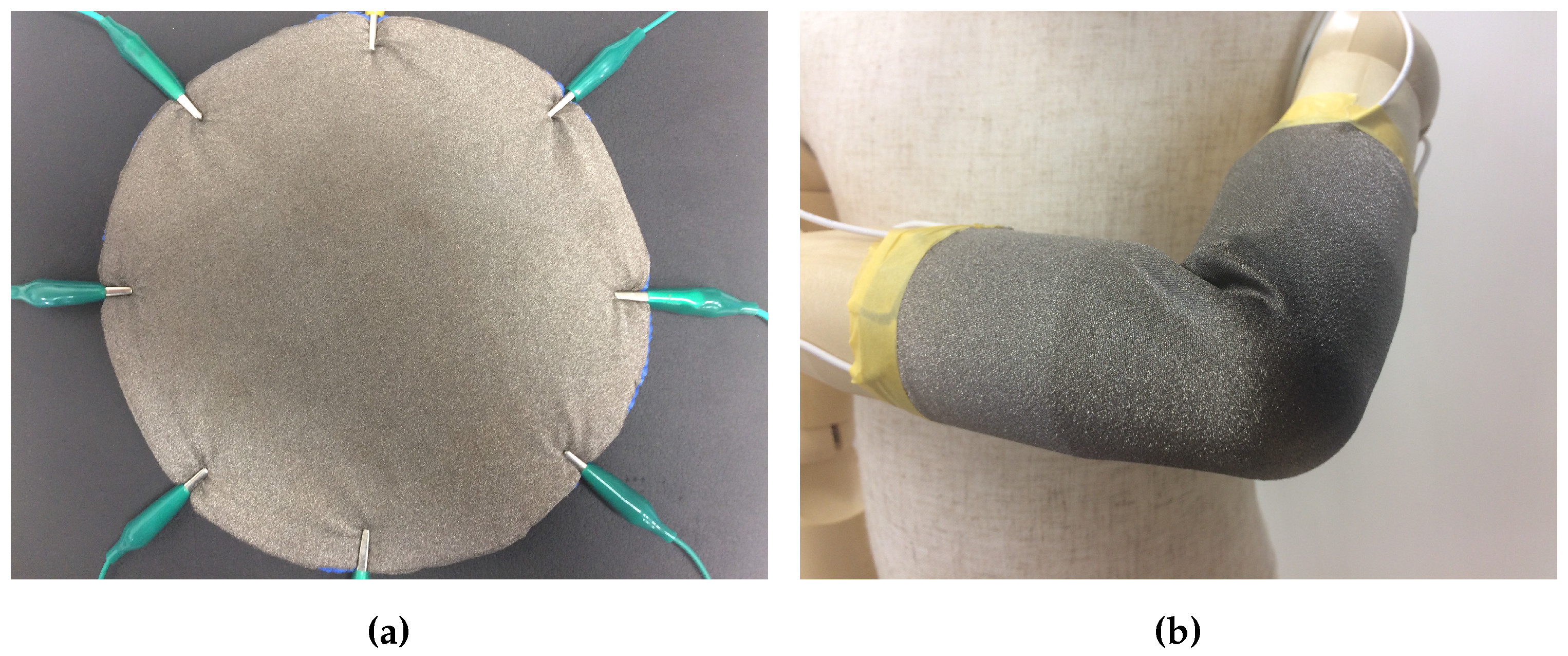
To exploit EIT as a tomographic technique, it is fundamental that the media over which the measurements are taken is conductive—best results are achieved when the conductivity is homogenous over the whole domain. In order to let our sensor achieve flexibility and adaptivity to various geometries, we used a highly conductive medical grade textile (Statex, Shieldex MedTex180) as sensing material. The material changes its conductivity non-linearly when stretched along any of the two directions. The conductive layer was firmly attached to a thin, stretchable foam substrate. This sightly limits the stretchability of the whole sensor, but allows the conversion of normal forces (i.e., vertical forces, such as touch) into noticeable local in-plane deformations. An additional benefit inherited from the use of the substrate consists of the possibility of applying the artificial skin over different materials while maintaining its insulation from the injected electrical current. The sensing area of the artificial skin has a circular shape, with a diameter of 200 mm.
Figure 3 shows an overview of the artificial skin in two different application scenarios.
5. Discussion
The main aim of this work was the investigation and development of a low-cost adaptable smart sensor that can adapt to different configurations while maintaining its sensing capabilities. Compared to currently available solutions, the system under study is smaller and simpler, but similarly effective. To prove the capabilities of the developed sensor, we tested the system under different configurations, the results of which we will describe in this section.
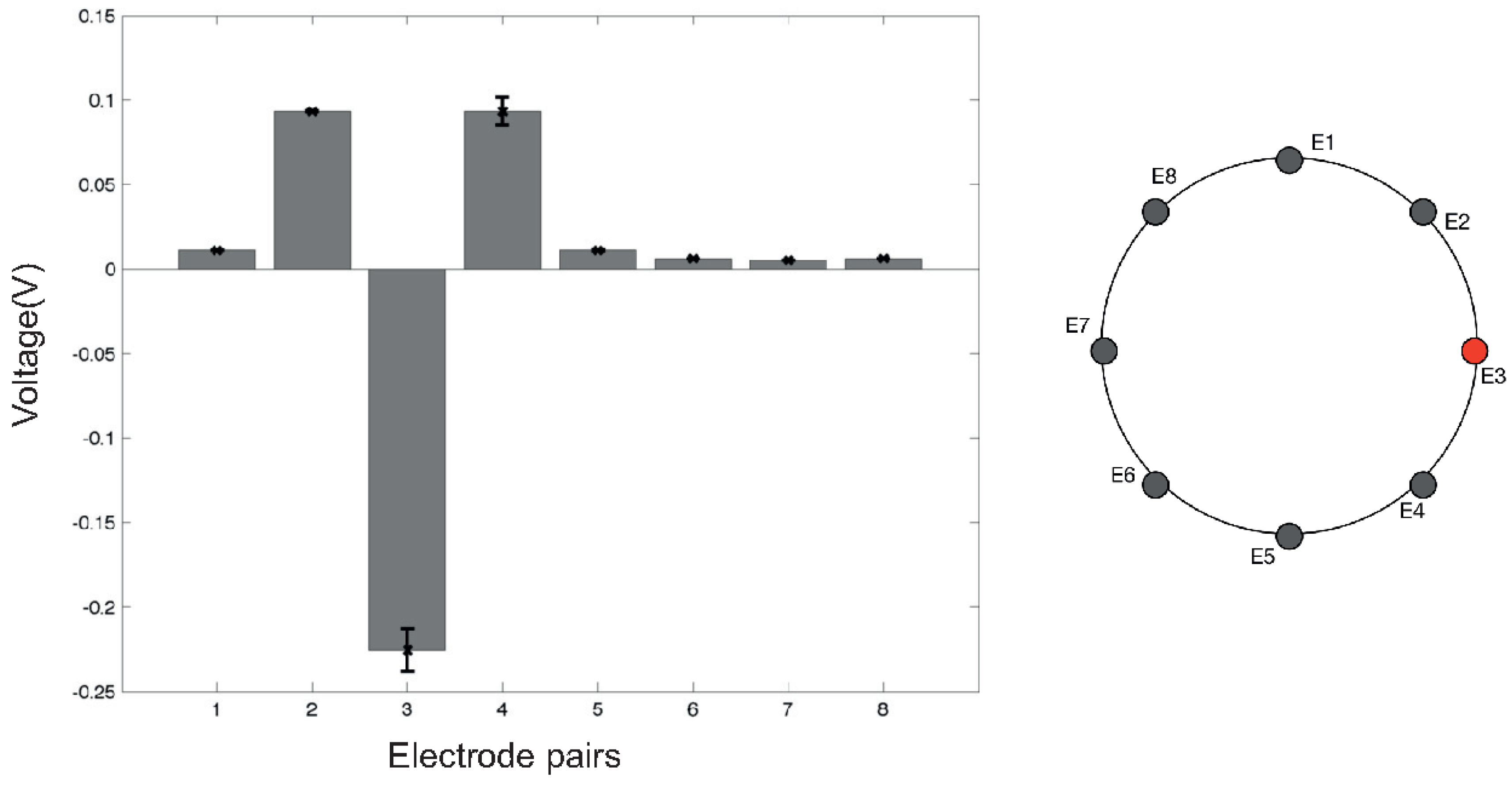
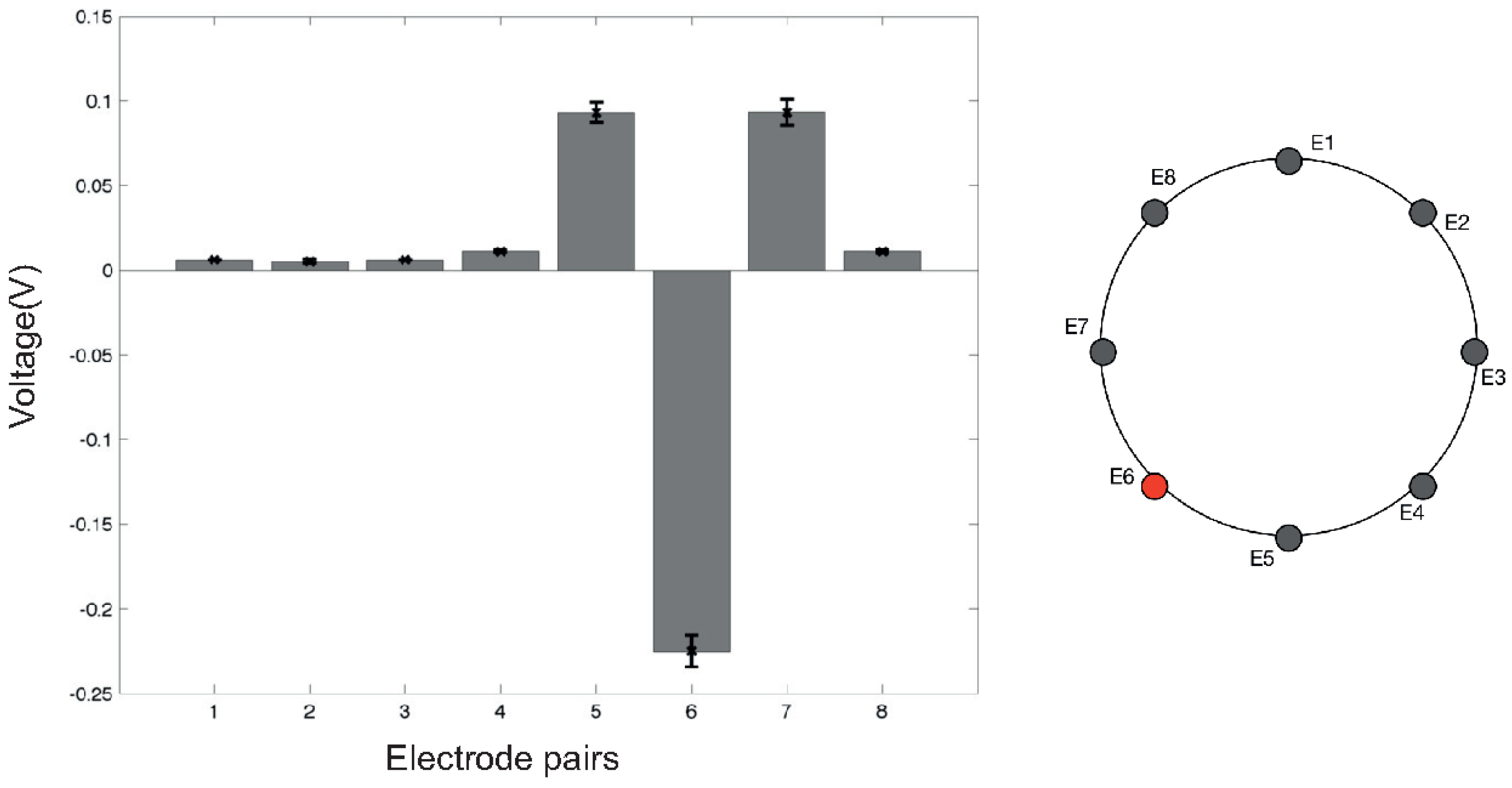
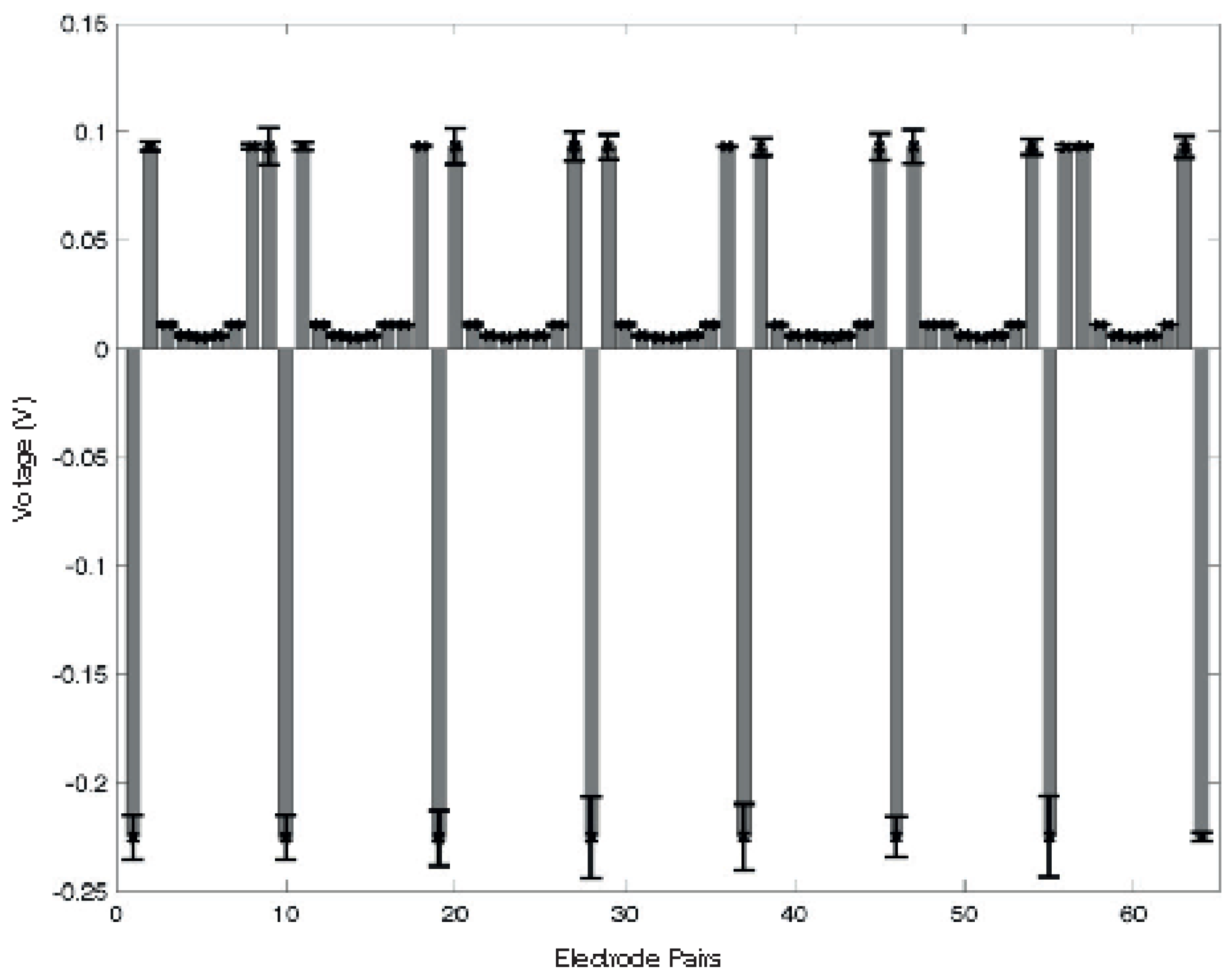
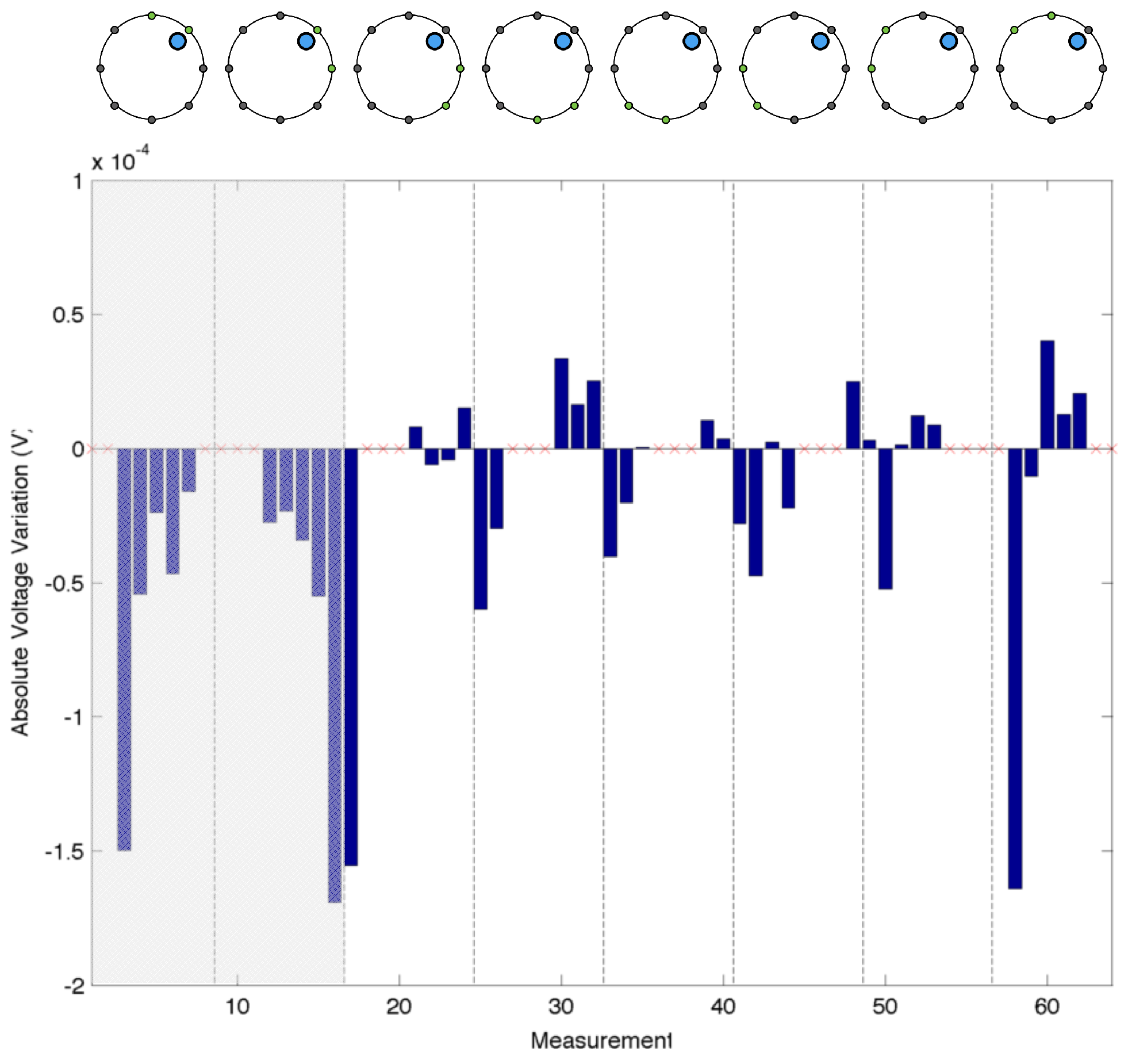
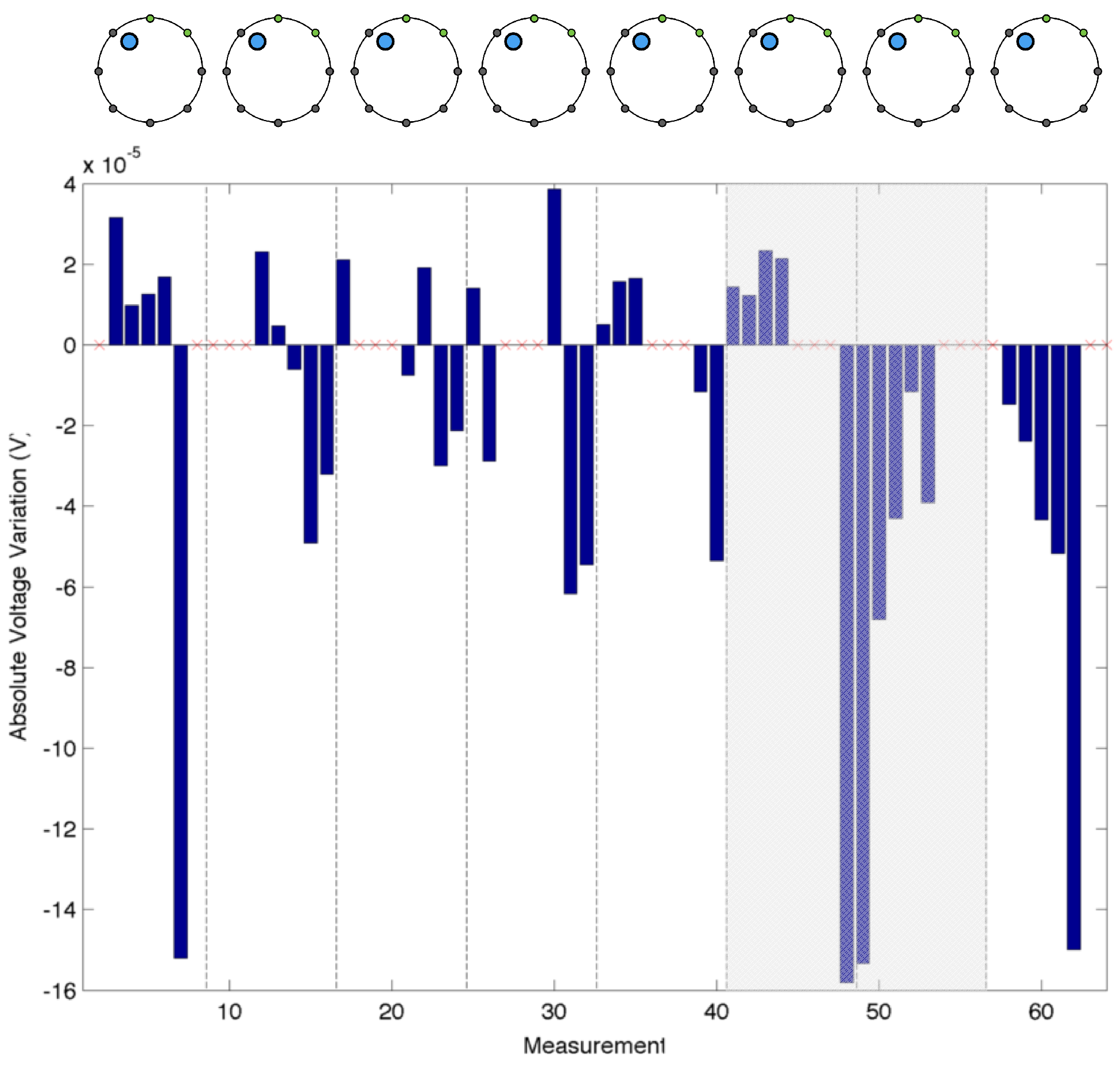
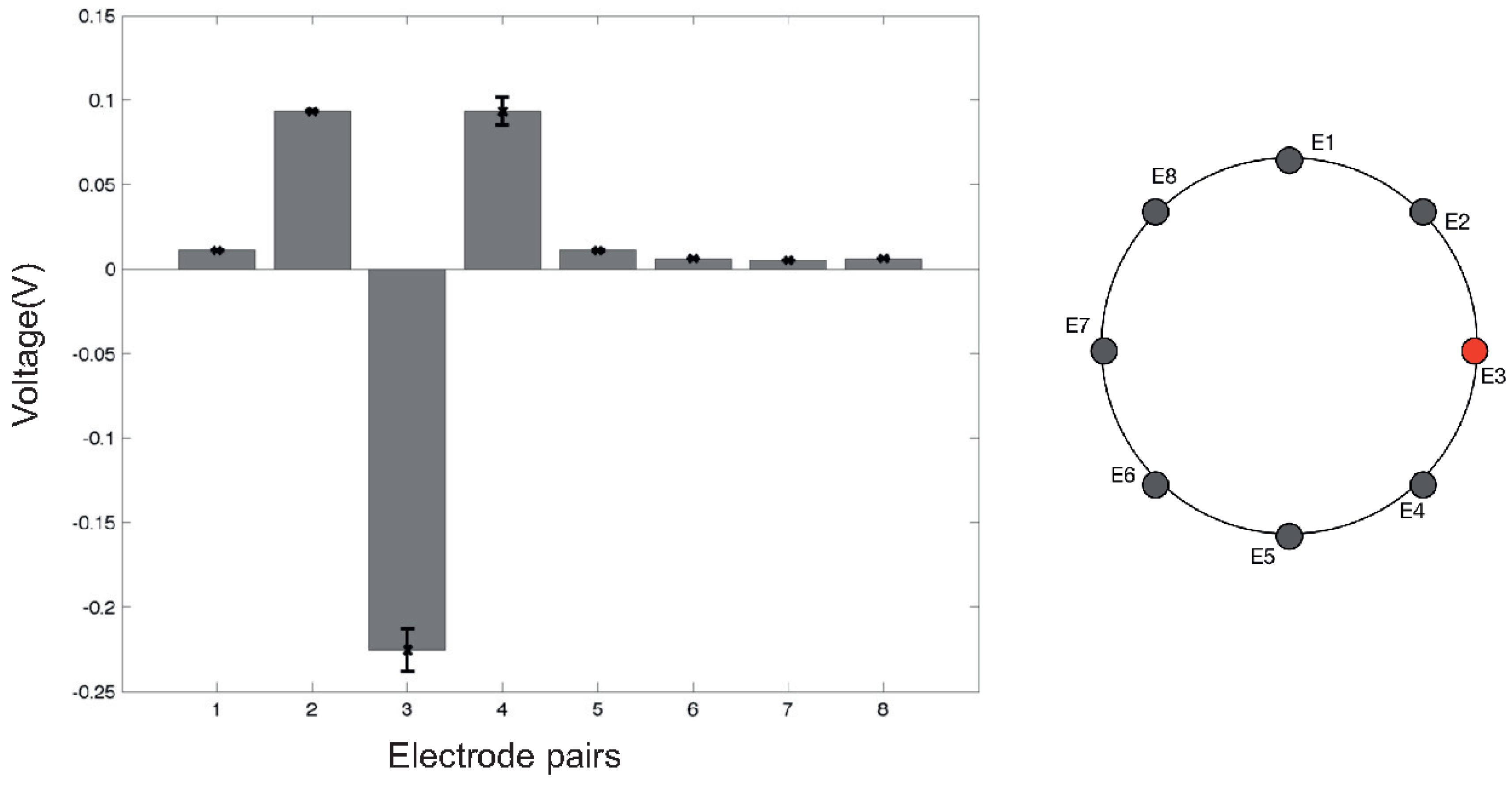
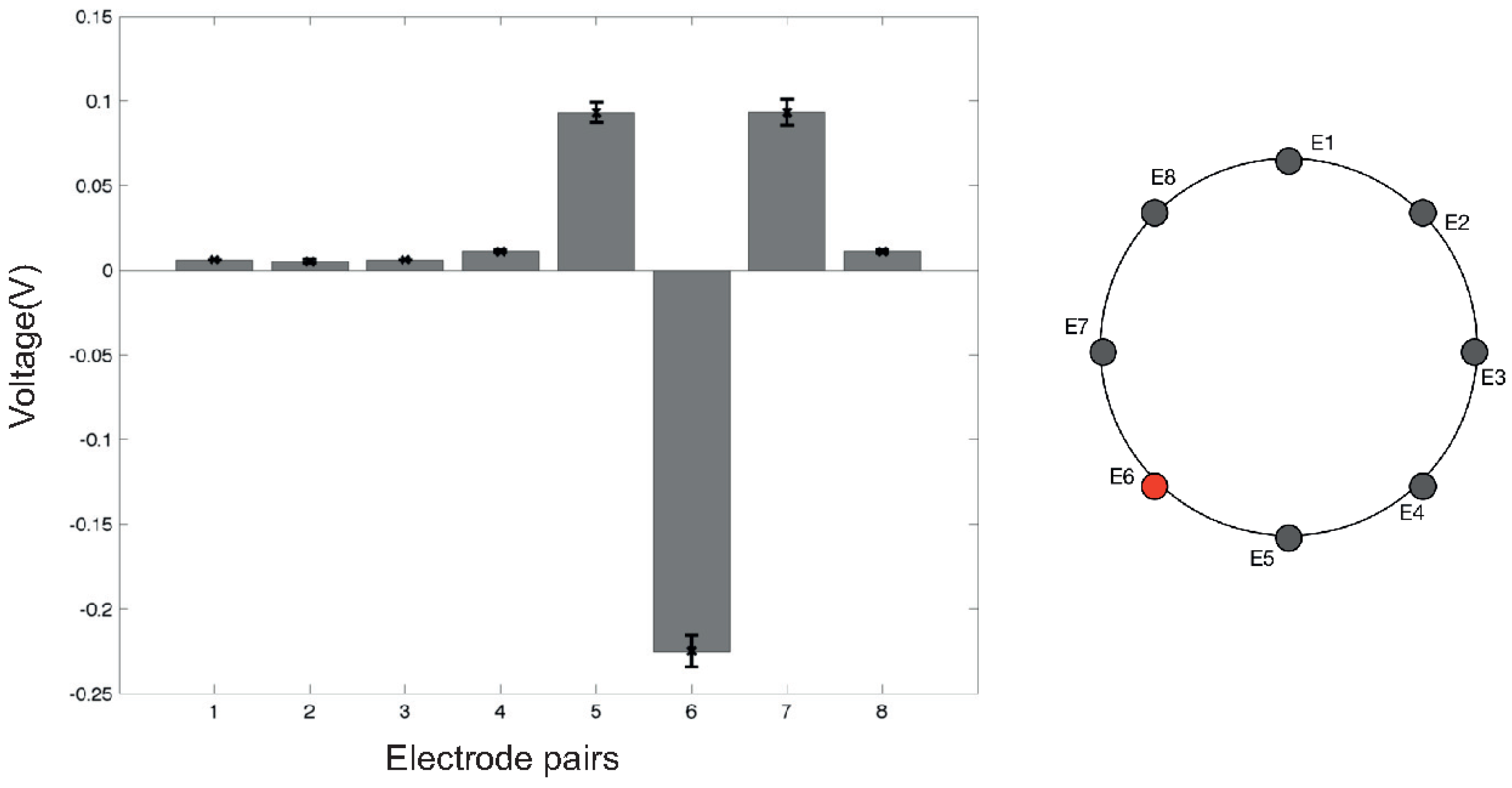
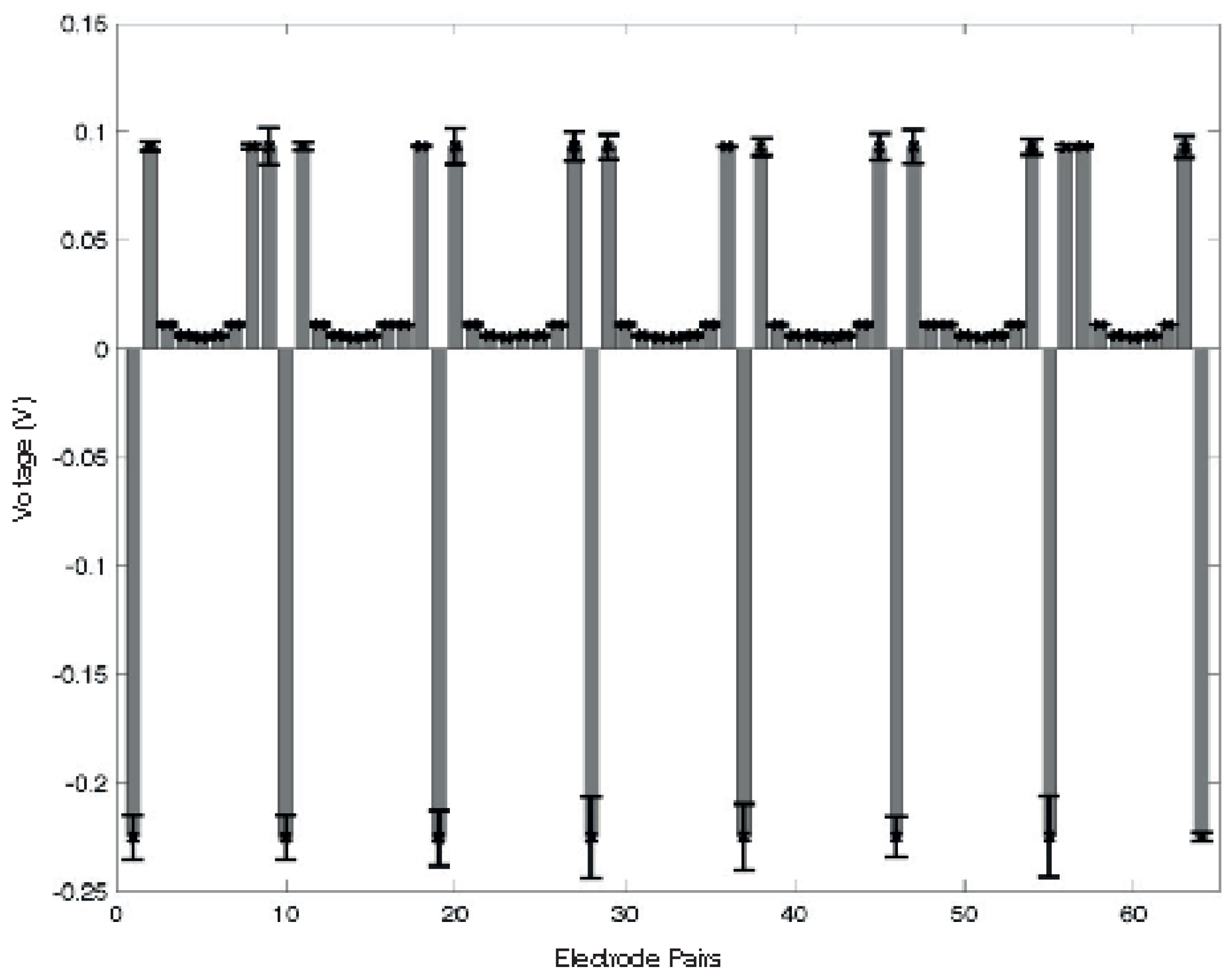
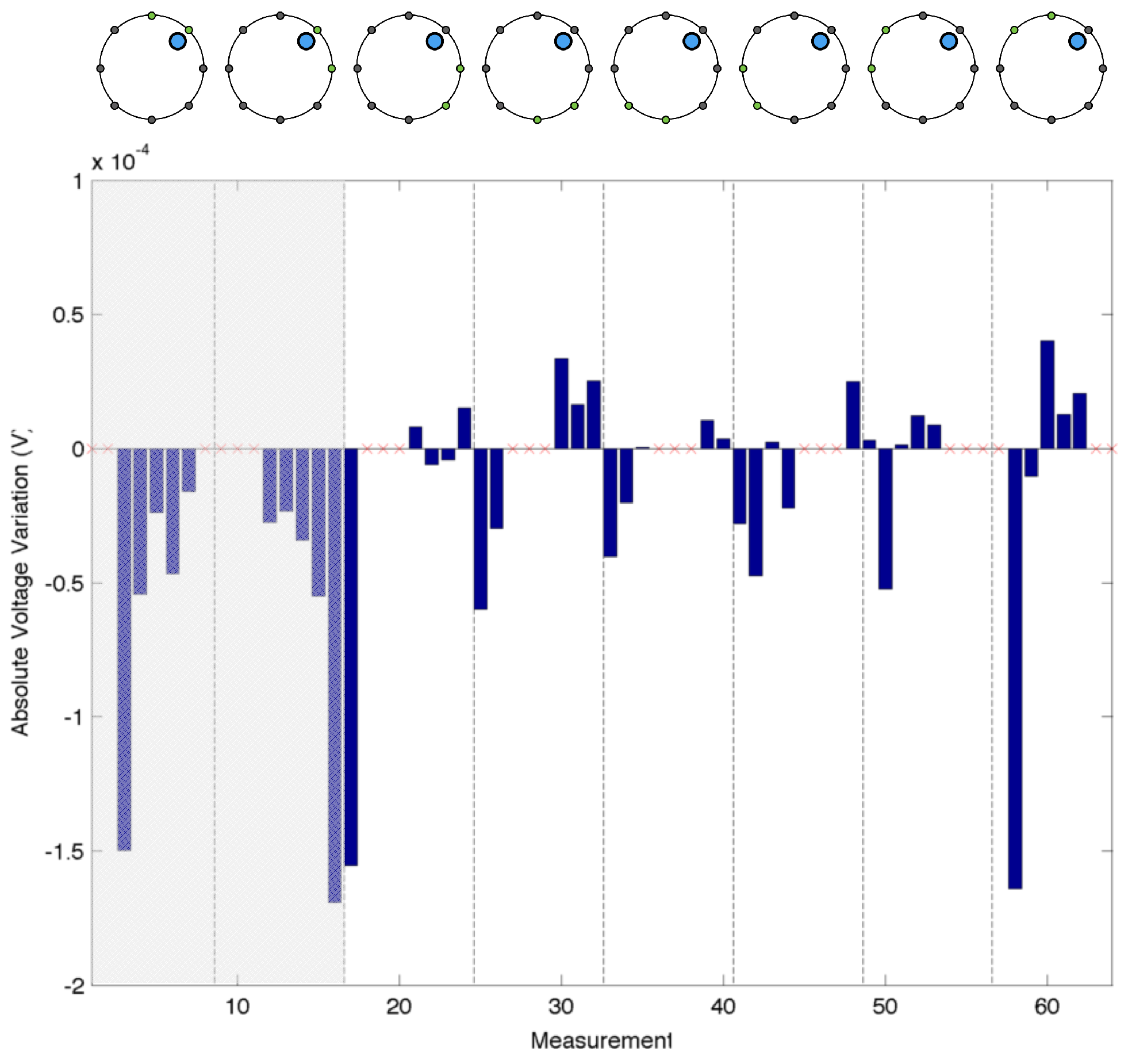
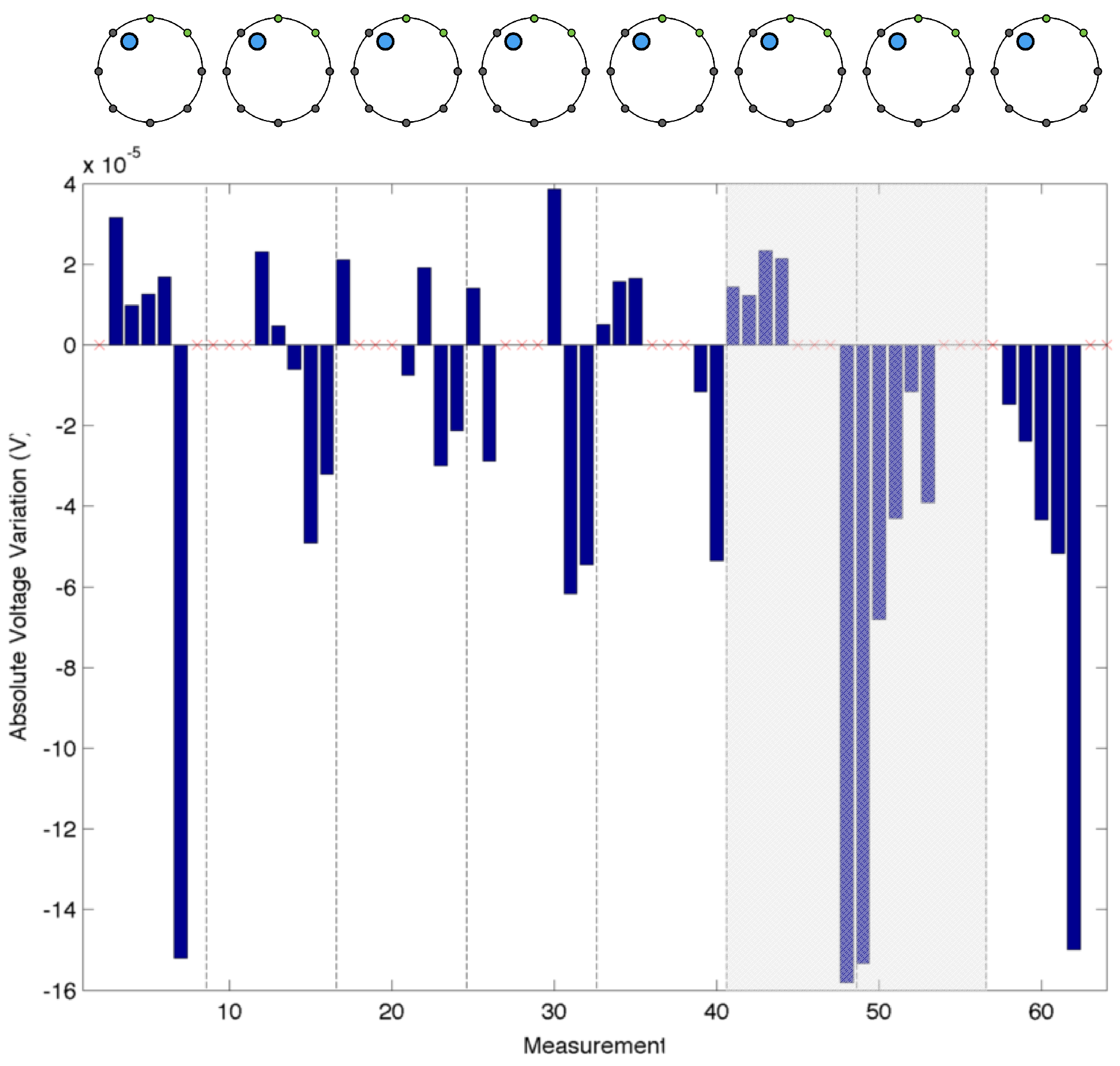
A first series of experiments was performed to characterise the behaviour of the artificial skin. Concerning the specific results obtained in the indentation tests (
Figure 8,
Figure 9 and
Figure 10), when compared to reference measurements (
Figure 5 and
Figure 6), it is possible to notice a common pattern of signal variation as a consequence of the presence of a probe (in this specific case, a 15 mm circular section one) that applies a force in the region directly facing one of the electrodes under test. The graphs shown in the figures depict the absolute variation of the electric potential with respect to a reference voltage (
). In these, the presence of the inhomogeneity can be noticed as a drop in the electric potentials measured at the electrode under test—i.e., E2 in
Figure 8 and E7 in
Figure 9. The variation is caused by the change in conductivity of the conductive layer used for sensing as a consequence of the normal force applied over it. As
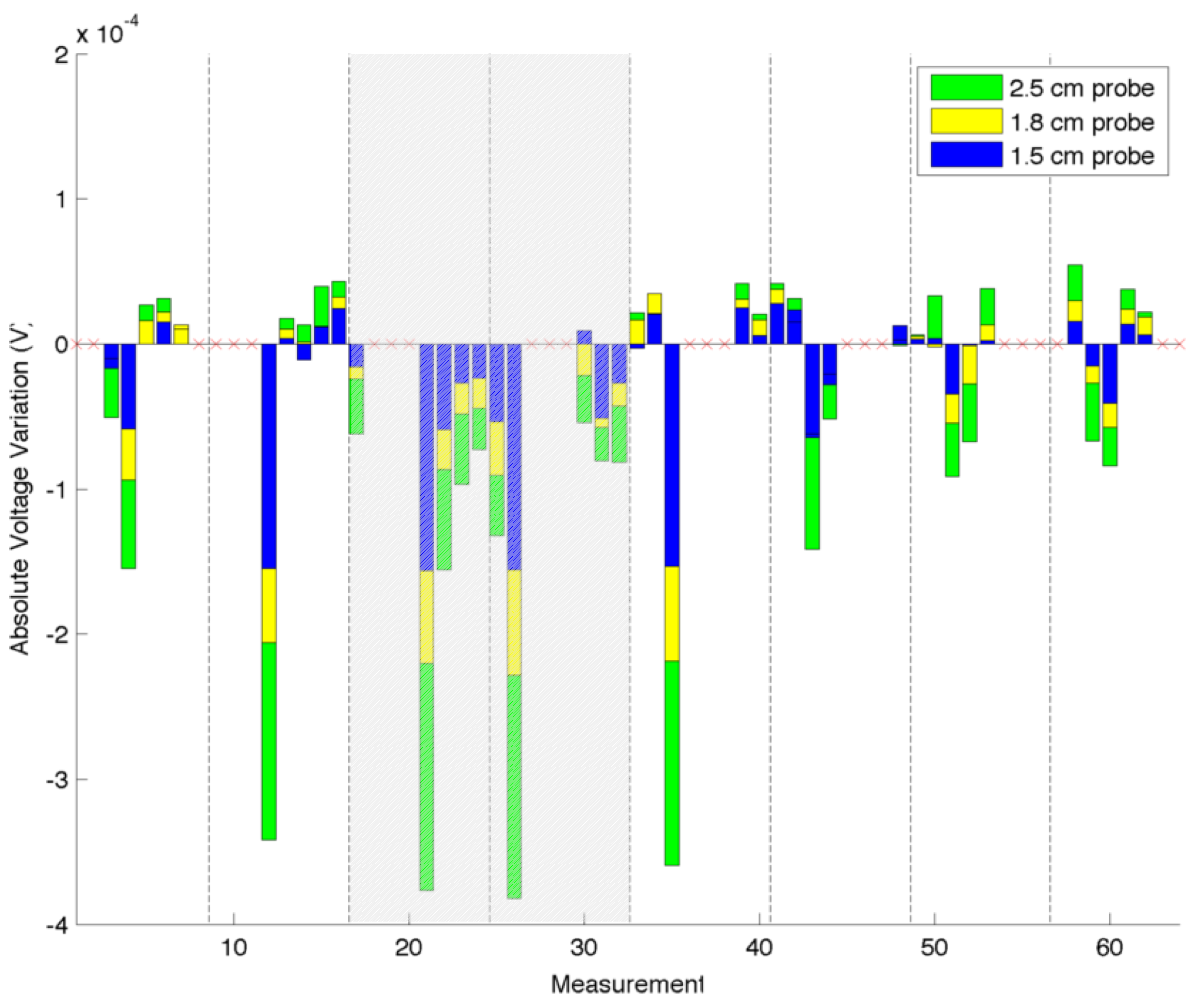
Figure 10 suggests, the change of the electric potentials is directly related to the size of probe used to apply a constant force.
Following the obtained results, we move toward the evaluation of the conductivity map reconstruction algorithm. To prove its effectiveness, we test the system under different configurations, in which we applied different probes independently or simultaneously over the artificial skin. Concerning such experiments, we refer to
Figure 11,
Figure 12 and
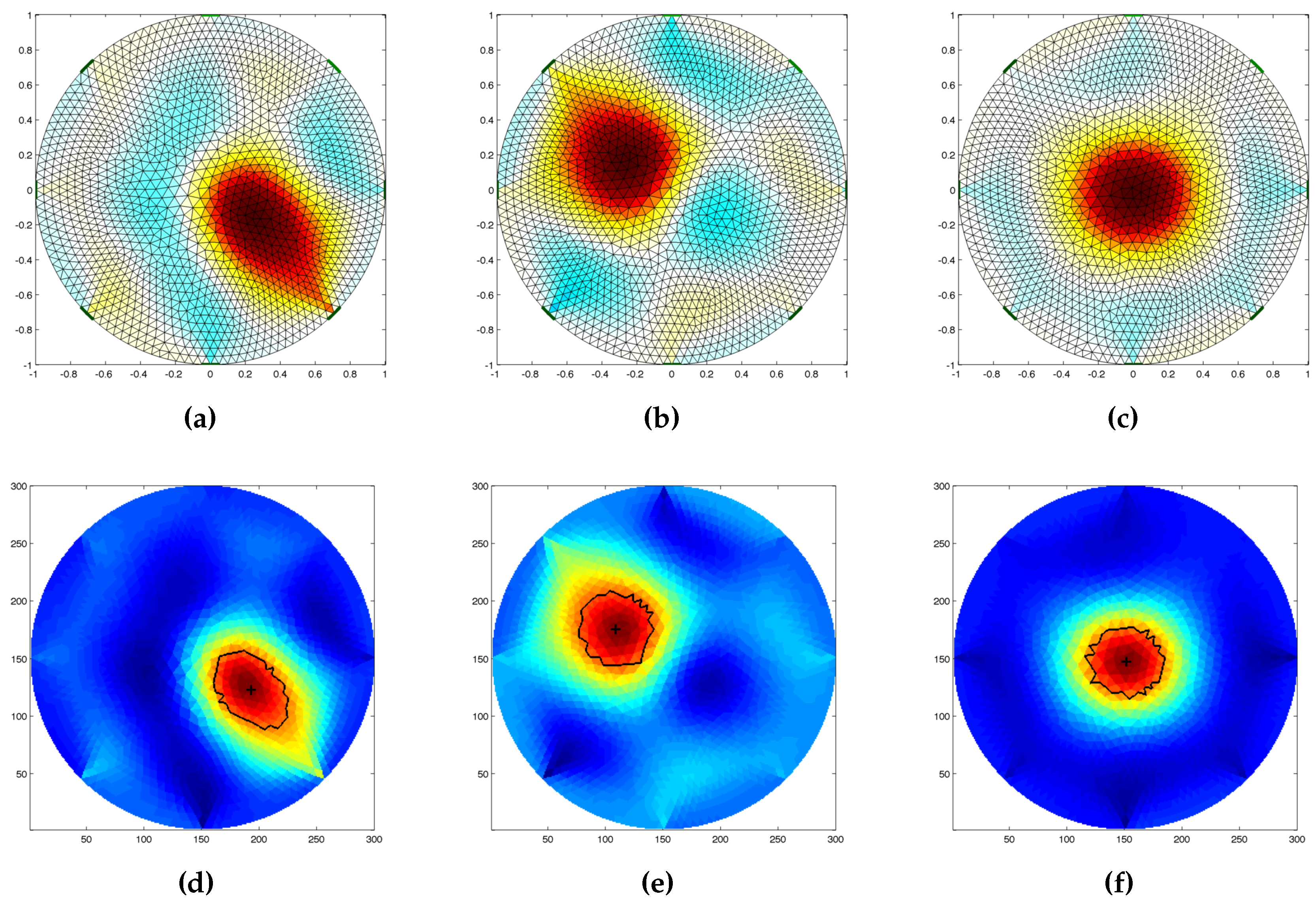
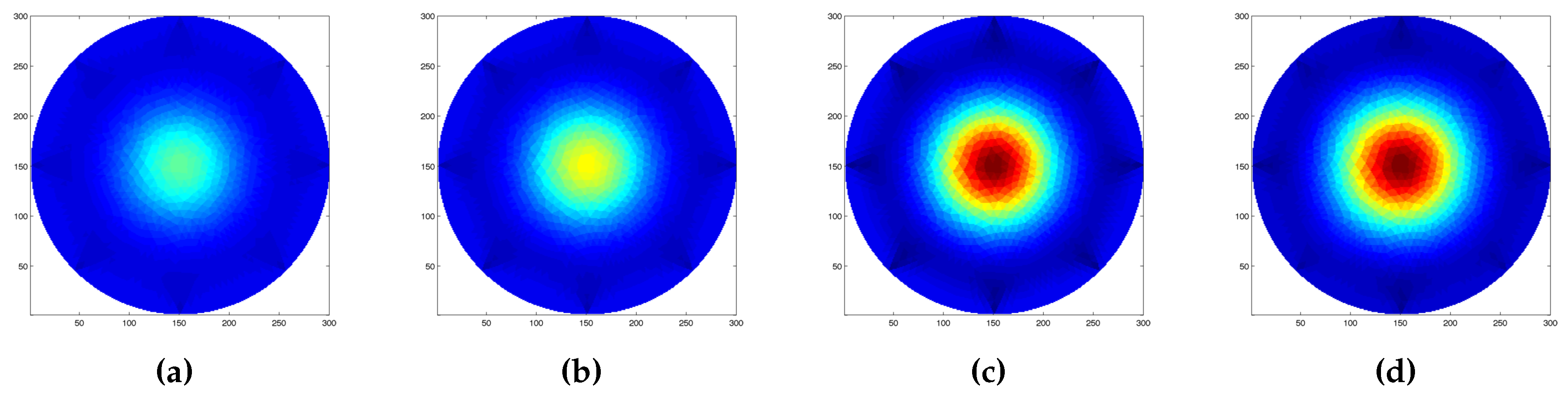
Figure 13. The reconstructed pressure map (which is equivalent to the conductive map of the domain under study) was obtained by solving the associated inverse problem using a dynamic imaging approach. This consists of comparing a reference reading taken when no load was applied over the surface with a later one where a force was applied. Since the EIT inverse problem is ill-posed and ill-conditioned, in order to ensure uniqueness of the solution, it is needed to regularise the model during the inverse problem solution Parameters to correctly tune the solver were selected after a series of trial and error experiments, and have been proved to be appropriate by evaluating them under different system configurations. It is worth noting that we kept the parameters constant in all experiments. Because of the low number of emitters and detectors used to build the electronic skin tested in this work, we did not expect a good spatial resolution for the contacts applied over the sensing area. Despite this, results provided in
Figure 11 show that the inverse solver can correctly identify the position of the applied force, but could not clearly identify its shape. To have a sharper identification of such area, we further process the data by thresholding it, identifying the pixels having value up to
of the maximum value present in the map. Considering the limitations due to the low resolution, we further test the system capabilities to discriminate between different probe sizes and shapes. The results of these experiments are provided in
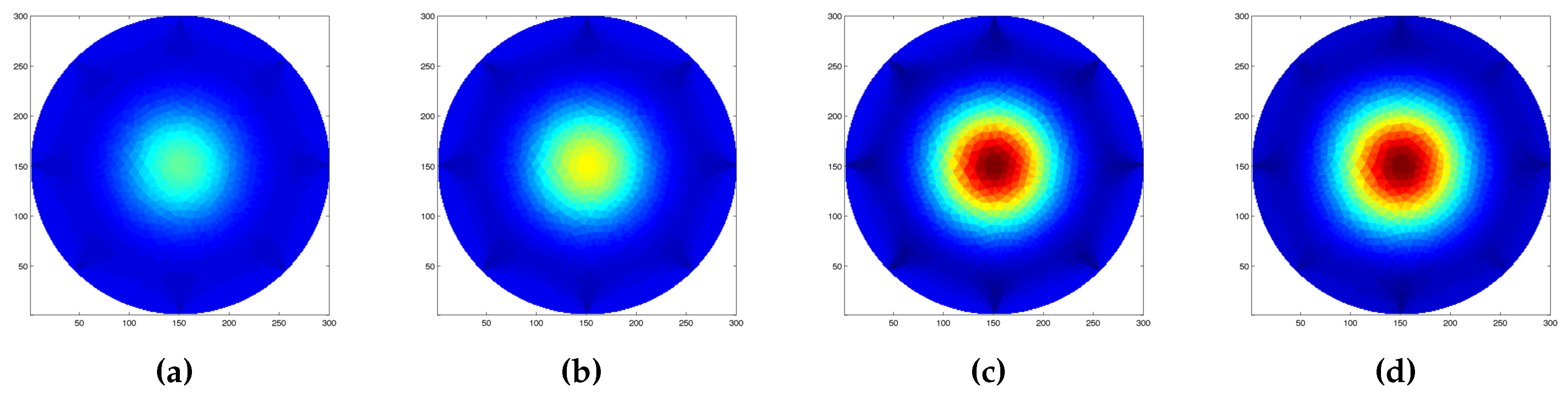
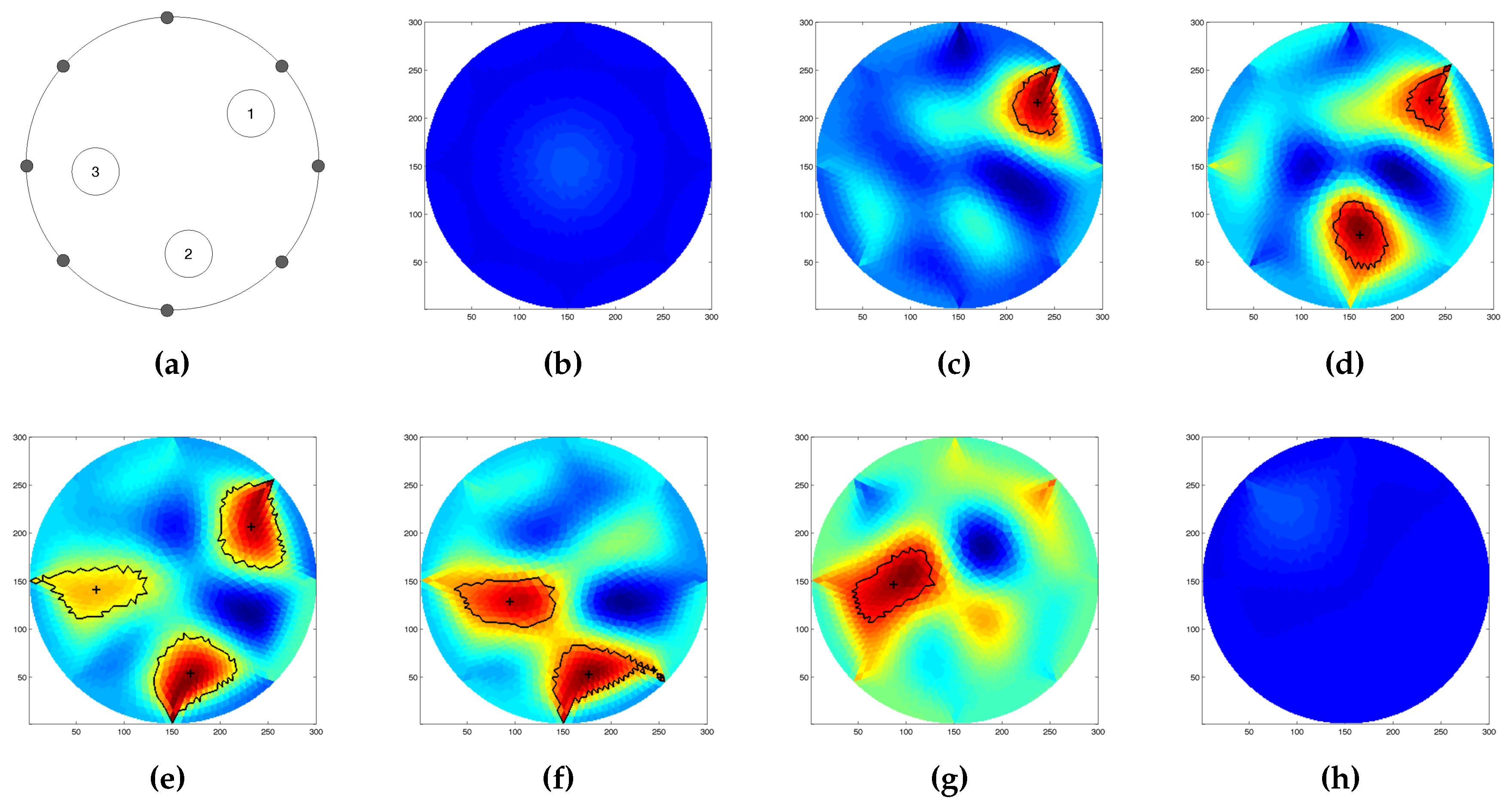
Figure 12. As the reconstructed images suggest, the system is not able to correctly discriminate between different probe shapes (i.e., circular and square head), but it is able to correctly capture the differences in size (i.e., 15 mm, 18 mm, 25 mm for the circular probe, and 15 mm side for the square-headed probe). As a last test for this series of experiments, we evaluated the capability of the system to determine the presence and position of multiple probes that act sequentially and simultaneously over the sensing area of the artificial skin. For this series of experiments, we used three identical probes (circular section with radius of 15 mm) that were loaded and unloaded in the same order.
Figure 13 shows selected frames of the process. In the figure, it is possible to clearly distinguish the area where the probes act, but due to the low spatial resolution, it is not possible to correctly identify their shapes. In addition, when all the probes were placed over the surface, in order to detect their positions, we had to change the value of the thresholding parameter used in the image segmentation. The use of a larger number of components, along with the introduction of more advanced coupling schemes for emitter–detector pairs can in the future improve the spatial performance and thus overcome some of the problems that the system is currently facing.
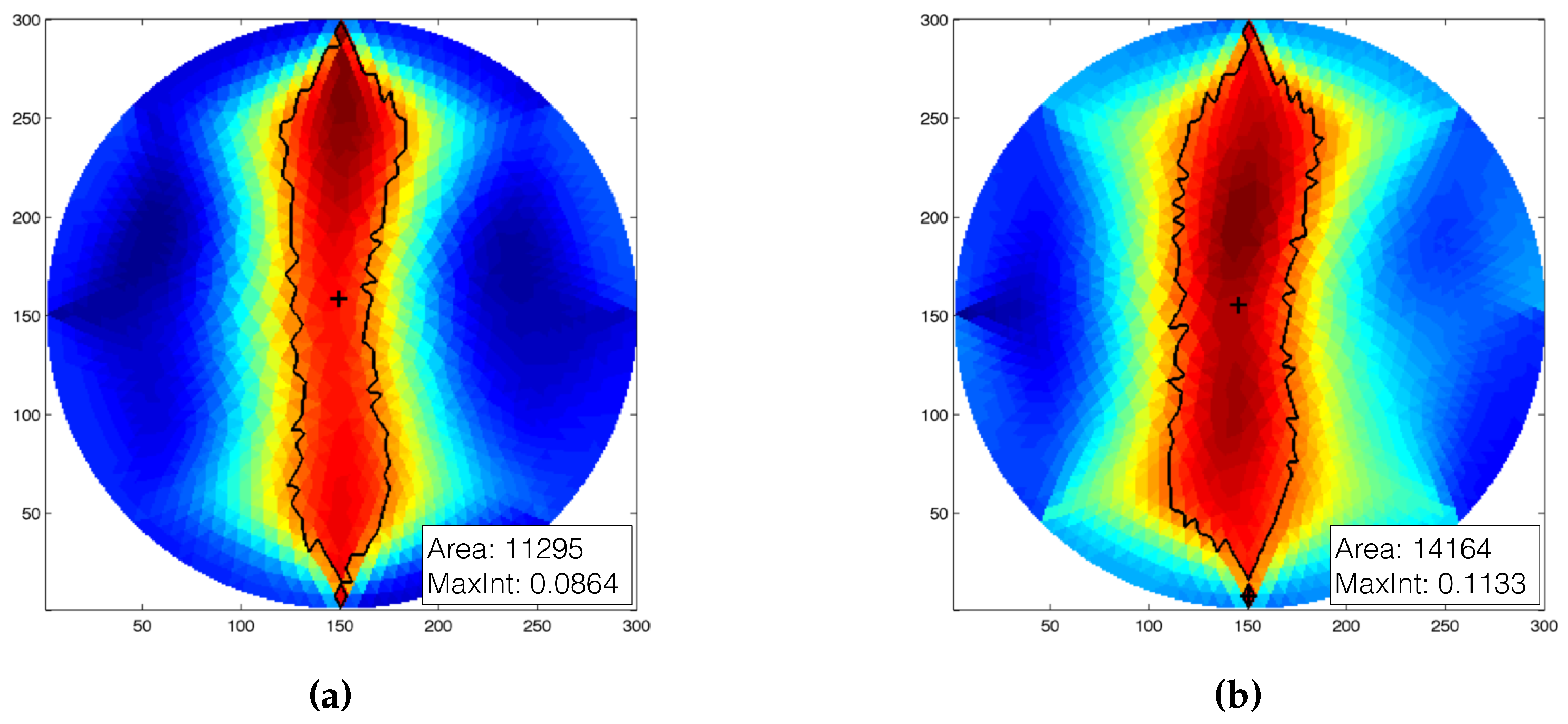
We further tested the capabilities of the artificial skin by evaluating its ability to adapt to different geometries while maintaining its sensing performance.
Figure 14 and
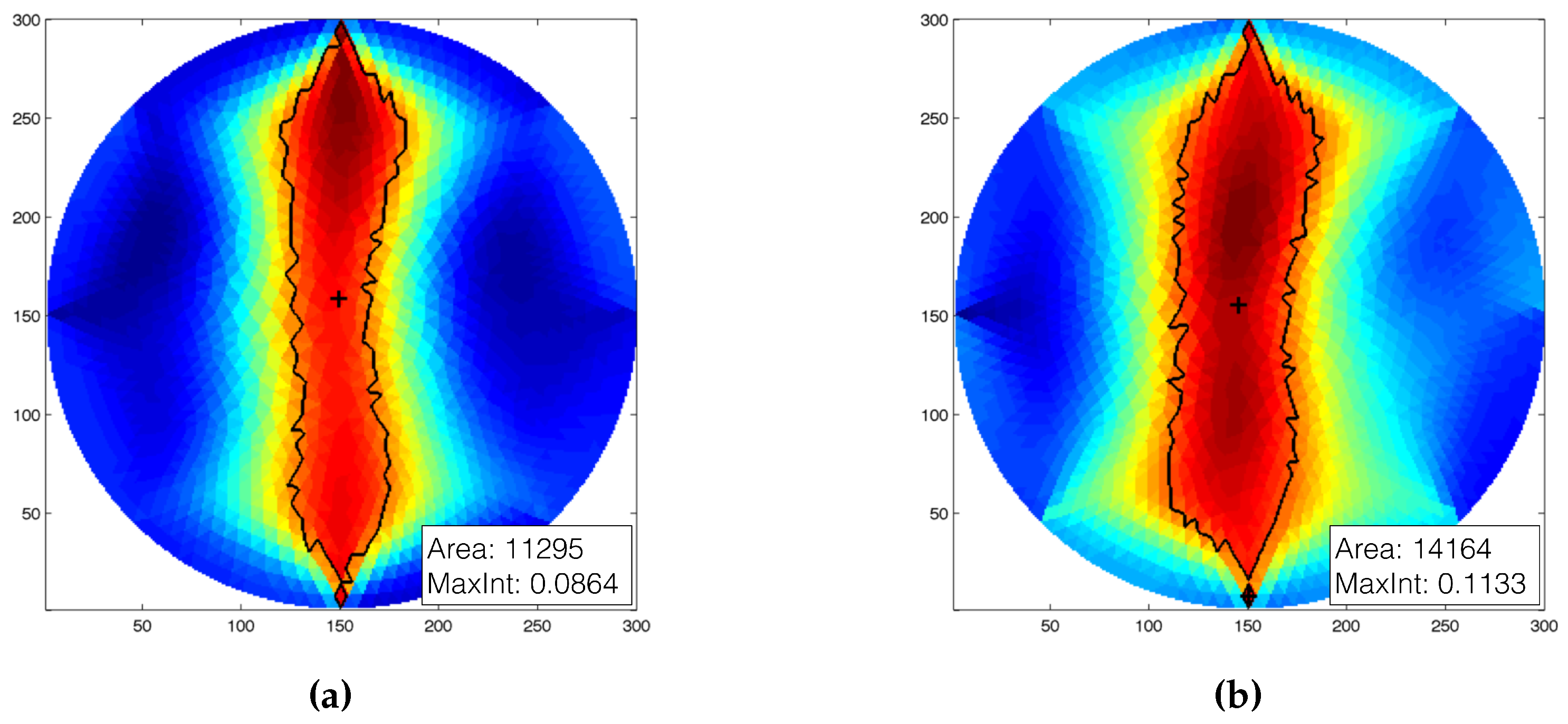
Figure 15 show the results related to this last series of experiments. In the first phase, we tested the system’s ability to detect a change in the underlying geometry caused by a significant change in the potential measurements (
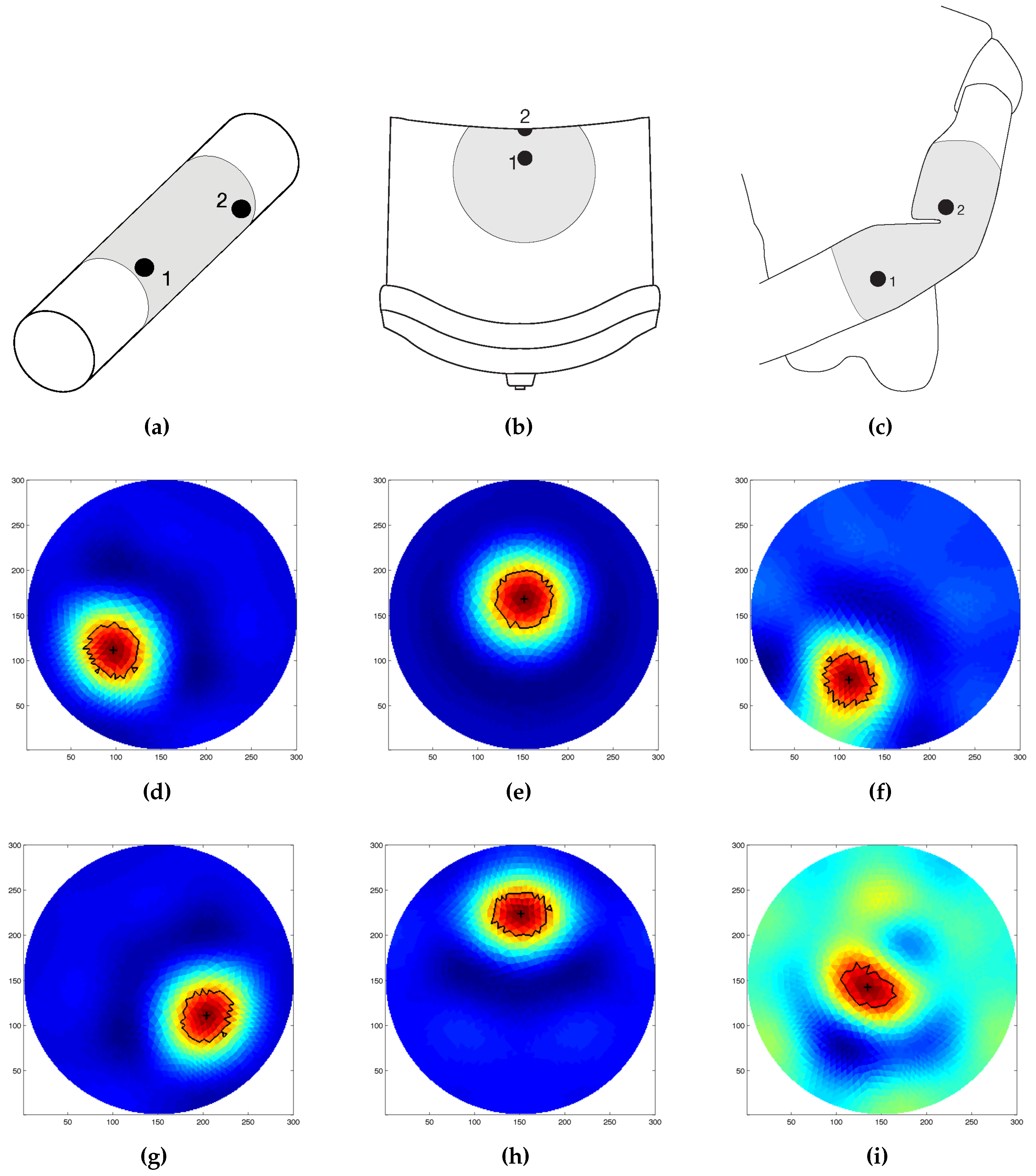
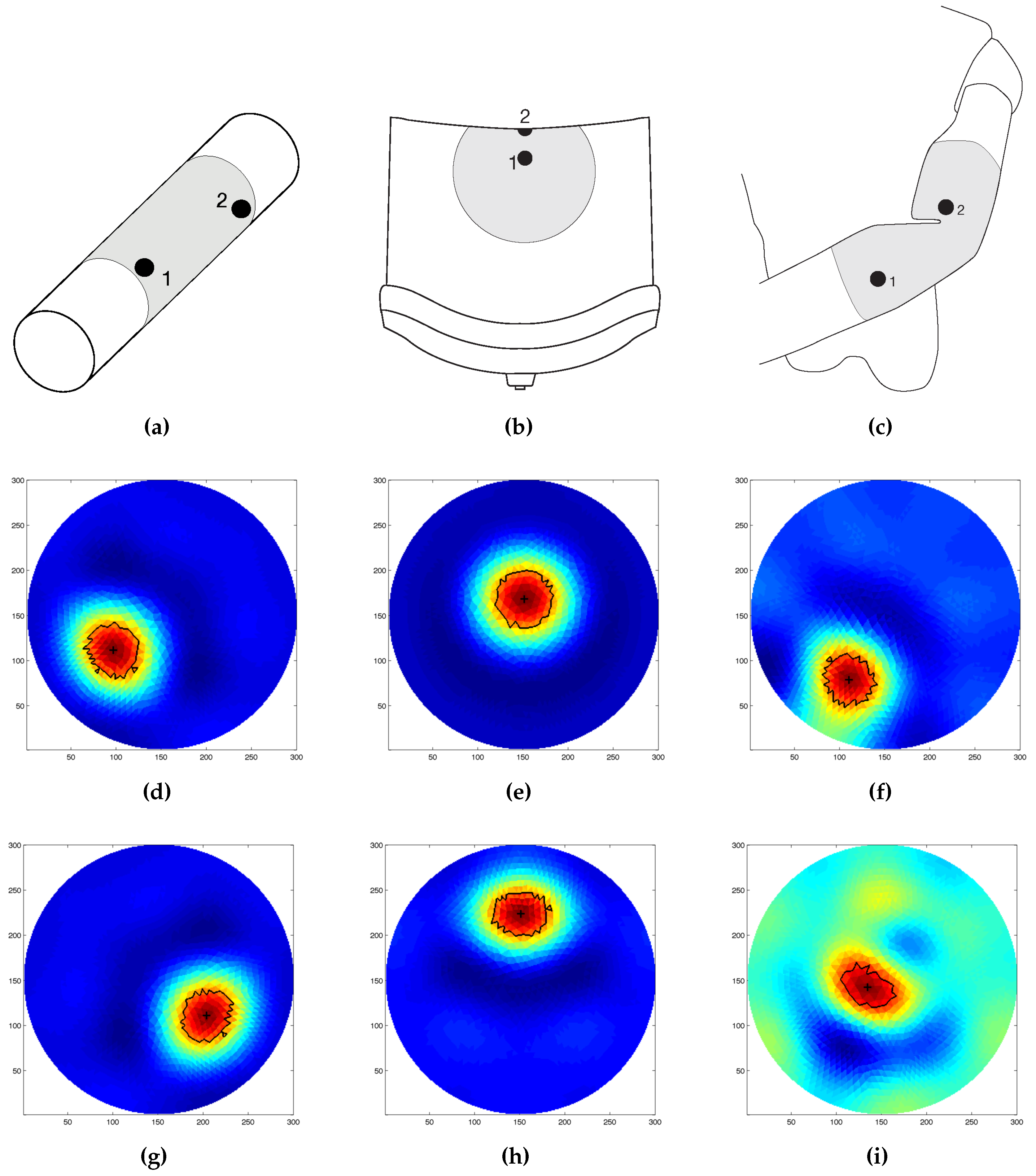
Figure 14). We first acquired a series of electric potentials with the artificial skin placed over a flat surface, and then manually placed it over a curved one. As curved surfaces, we used two different cylindrical objects with radii 40 mm and 70 mm, respectively. As the results indicate, when compared to the reconstructed images from the flat cases, the reconstructed images show a different “shape”. These results, together with the fact that the maximum detected value and the size of the “deformation area” increased with respect to the radius of the underlaying cylinder, can be used as a clue to discriminate between different events (i.e., bending vs. touch) and their intensity (e.g., bending angles). Additionally, we tested the sensing capabilities of the system to provide reliable pressure readings when subjected to large deformations. In order to prove this, we tightly attached the artificial skin to objects having different shapes, and then performed pressure sensing. Contrary to the precious case, we acquired both the reference measurements and the later ones when the artificial skin was already placed over each object. Doing so, all of the deformations that occur as a consequence of the underlying geometries are negligible, since they are already taken into consideration in the reference measurements.
Figure 15 shows the results for each of the considered scenarios. As the results suggest, the system maintains its sensing capabilities and can identify the position where the probe was applied. Some issues were noticed when the sensor was applied over the mannequin, especially in the joint area. If the joint is moved after acquiring the initial reference measurements (
Figure 15i), the measurements acquired later are affected by a planar force applied by the joint—i.e., the joint stretching the material. The sensor can be still used in this situation by taking new reference measurements according to the information provided by the joint encoder. For all the other cases, results remain valid, even when the probe was applied over the most bended area (
Figure 15g,h).
6. Conclusions
In this paper we presented an artificial skin able to easily conform and adapt to different shapes while keeping all of its sensing capabilities. It is easy to fabricate, requires low power consumption, and allows continuous and distributed sensing over the entire surface, since it does not require discretised components or connection wires within the sensing area. This was made possible by exploiting as working principle a tomographic technique known as Electrical Impedance Tomography (EIT). The technique allows inference of the structure of the studied media by injecting an electrical current into it and by measuring electric potentials from its boundaries. The use of this technique allows continuous distributed sensing without the need of active components directly embedded inside or beneath the sensing area. A direct consequence of the use of this approach is the simplification of the fabrication process (the sensing area can be any conductive material) and a smooth extension to higher resolution. In addition, not having connecting cables that sit in the sensing area allows the developed of smart skins that can have a wider surface and that can easily adapt to different substrates and shapes. These are features that are not always achievable with the classical transduction methods. Moreover, an important aspect is the one related to the architecture used in the system. In fact, in order to increase the spatial resolution, the number of active components increases linearly with the length of the sensing area boundary, rather than with its area. This can be proven to be advantageous in terms of both costs and power consumption. On the contrary, the increase of active components places a larger burden in terms of computation time for the voltage acquisition system. Similar approaches have already been presented, but our sensor structure presents additional system simplifications and hardware modularity that allows it to be more easily applied in situations where not only the sensor should adapt to different geometries, but also the underlying structure can change its shape.
In order to prove the feasibility of the system, we tested it under different situations by varying the size, shape, and the number of the probes acting over the artificial skin surface. Although we were not able to correctly distinguish between the different probe shapes, we managed to detect their positions in space and have some idea of their size. Furthermore, we tested the system in configurations where it was subjected to large deformations and applied over different geometries. In every case, the system performances were more than acceptable. Despite the positive results, the artificial skin has some limitations, especially related to the spatial resolution and the detection of small forces. It is possible to partially overcome the issues by increasing the number of electrodes used, or by changing the current injection and voltage acquisition pattern, with the drawback of the increasing the acquisition time and increasing the computational cost of the solution of the inverse problem.
Future works include the development of a larger electronic skin with higher density of active components, while keeping the focus on fast processing for real-time applications by exploring different coupling schemes. Additional work should also be done on the hardware side, by adding a signal conditioning stage to ensure more precise measurements. Another method to increase the system performance is to couple the current sensing methodology with capacitive measurements. This method has proved [
32] to performs better than resistive both in detecting conductive an non-conductive objects. Since this sensor offers properties needed in the domain of soft robotics, we are currently investigating novel materials to be used as conductive layers that have similar properties to the one used in this work. In fact, the use of textiles is not suitable, since it is not possible to firmly attach them onto the material used to build such devices (i.e., silicon rubber).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}