2.2.1. Theoretical Selection of Combined Signals for GF TCAR
GF TCAR can eliminate most of the effect of the error sources, such as the satellite orbit error and the tropospheric bias, by adopting a pair of combined signals in each step. Taking advantage of the triple-frequency signals, the optimal combined EWL and WL signals can significantly enhance the efficiency and reliability of the AR [
33,
34]. However, many researchers proposed combined signals often only considered the EWL or WL signal independently instead of the signal pair [
12,
16,
21]. Therefore, the main aim of this subsection is to discover the optimal combined signal pair in theory to fix the ambiguities more easily, mainly considering the following four criteria, wavelength, the sum of ISFs and the measurement noise, the wavelength to total noise ratio and the theoretical success rate.
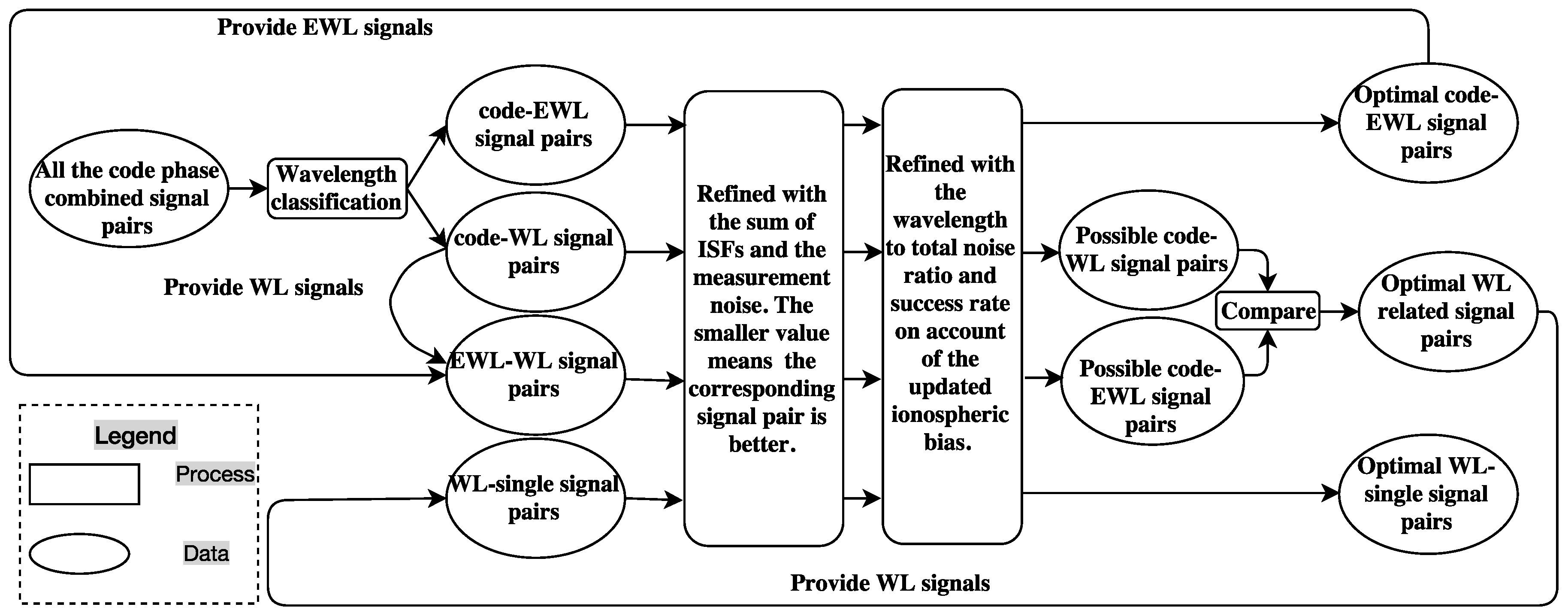
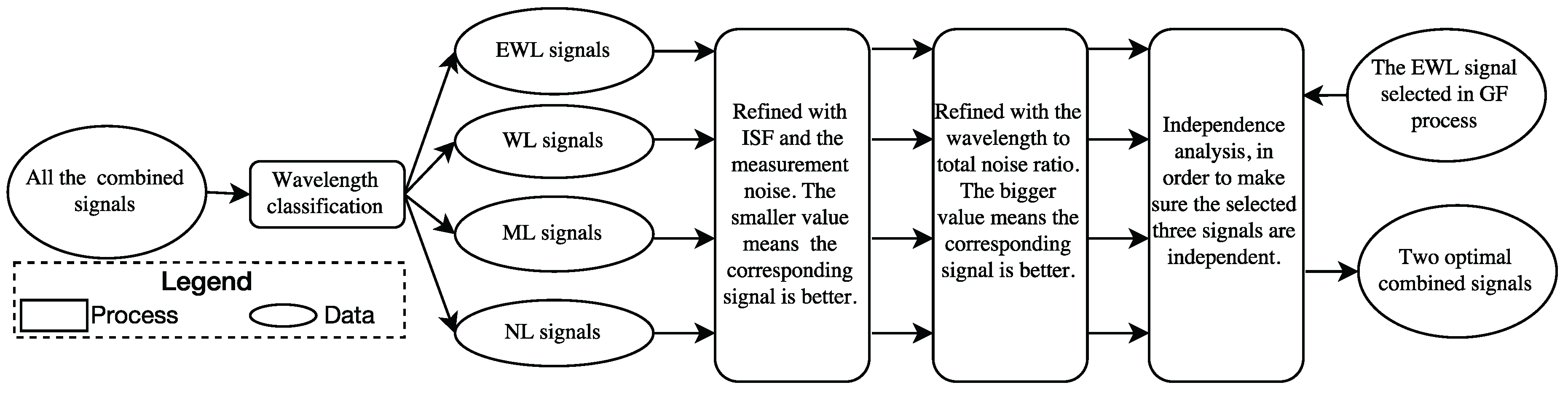
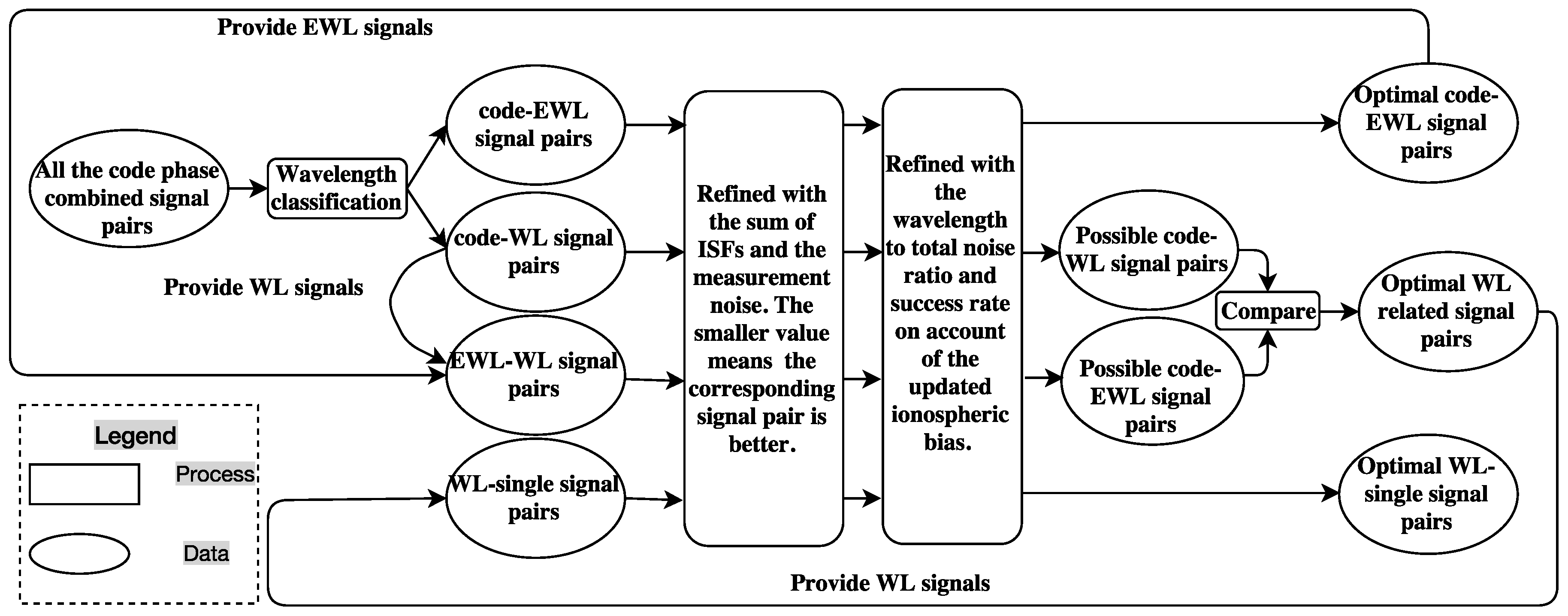
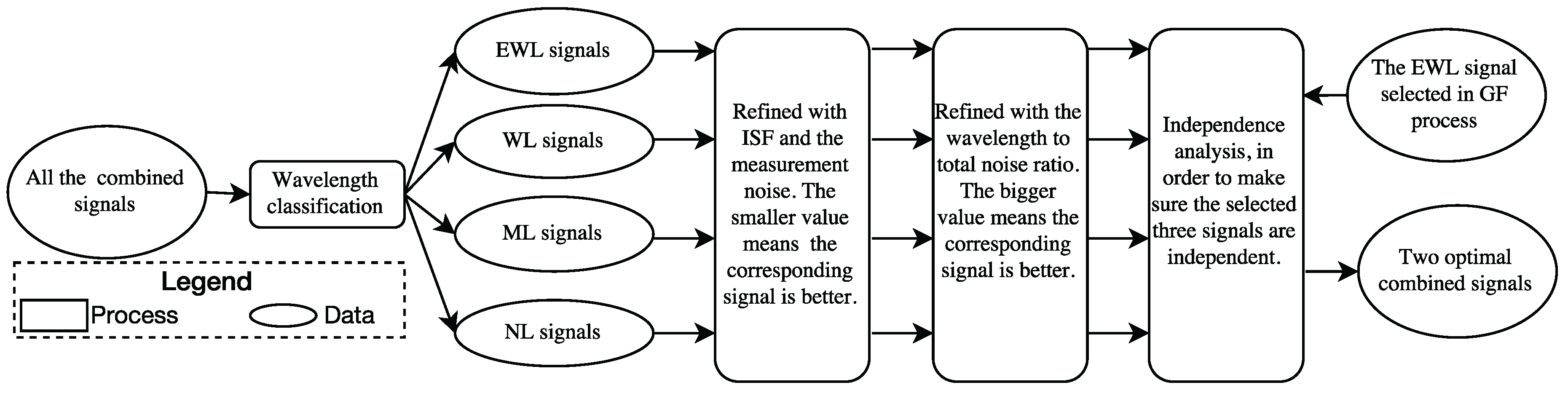
Figure 1 summarizes the procedure of selecting the optimal signal pairs for GF TCAR using these four criteria.
As combined signal pairs of different wavelengths are needed in different steps of GF TCAR, we will select two groups of combined signal pairs, EWL or WL, whose ambiguities are to be determined. The numerous selected signal pairs will be refined with the sum of ISFs and the measurement noise (
), which is calculated by Equation (25) and denoted in units of cycles. Usually, a smaller value of the sum of the ISFs means the corresponding signal pair is less affected by the ionospheric bias, while a smaller measurement noise means more precision of the signal pair. Both of them contribute to AR. Ideally, signal pairs with the smallest sum of ISFs and measurement noise at the same time should be pursed, which is not often the case. In general, the ionospheric bias contributes the most error in the long baseline, while in the zero or short baseline effects of the measurement noise or the multipath are more considerable respectively. Thus the combined signals obtained based on the smallest ISF only may not be suitable for the zero or short baseline. It is a complex work to model the effect of the multipath, which is not considered to be a common factor when deciding the signals for AR as well. Thus, only the sum of ISFs and the measurement noise are taken into account in order to find the suitable signal combination pairs for different levels of ionospheric bias. After considering the ISF and the measurement noise, there will be still too many options left, which can be further refined with the wavelength to total noise ratio (
) and the success rate considering the updated ionospheric bias. The optimal signal pairs will be those with the largest wavelength to total noise ratio and the largest success rate. In this study, the measurement noise of the DD carrier phase on L1 is set to 0.5 cm, while the DD code noise is 50 cm [
13]. The ionospheric biases are linearly increased from 0 to 100 cm with the increase of the baseline length from 0 to 500 km [
13]. The total noise of the combined signal pair can be calculated by Equation (26). It should be noted that the selection of the mathematical symbol depends on whether the signal pair is a code and phase mixed pair or a pure phase pair. When a pure phase pair is adopted, the mathematical symbol is—in Equation (26), while
should be replaced with
in both Equations (25) and (26). The combined signal with coefficients
is the one with ambiguities to be determined. Equation (27) is for the calculation of the wavelength to total noise ratio.
The calculation of the theoretical success rate based on the assumptions is briefly introduced here. The ambiguity success rate is also known as the reliability of AR. When the success rate is sufficiently close to 1, the uncertainty of the integer AR can be neglected. The distribution of float ambiguities can be regard as a biased Gaussian normal distribution in units of cycle [
35],
. Where,
a is the true integer ambiguity;
σ is the part of standard deviation of the float ambiguities caused by the code and phase noise:
. Where,
is the standard deviation of the GF float ambiguities, which can be calculated by applying the variance-covariance propagation law to Equation (10), (13) or (16). Biases in the float ambiguities could be generated by outliers in the code data, cycle slips in the phase data, multi-path or the presence of unaccounted atmospheric delays, while in this study, bias is mainly considered as the effect of the ionosphere. Thus the probability of fixing
into
a equals fixing the bias into zero. Then, the GF ambiguity success rate is given as follows.
With regards to the former four criteria, the next mission is to determine the most useful signal pair out of the three fundamental carrier phases and the three original codes for the GF TCAR purpose. The combined signal pairs containing the combined code signal and EWL phase signal are firstly selected as shown in
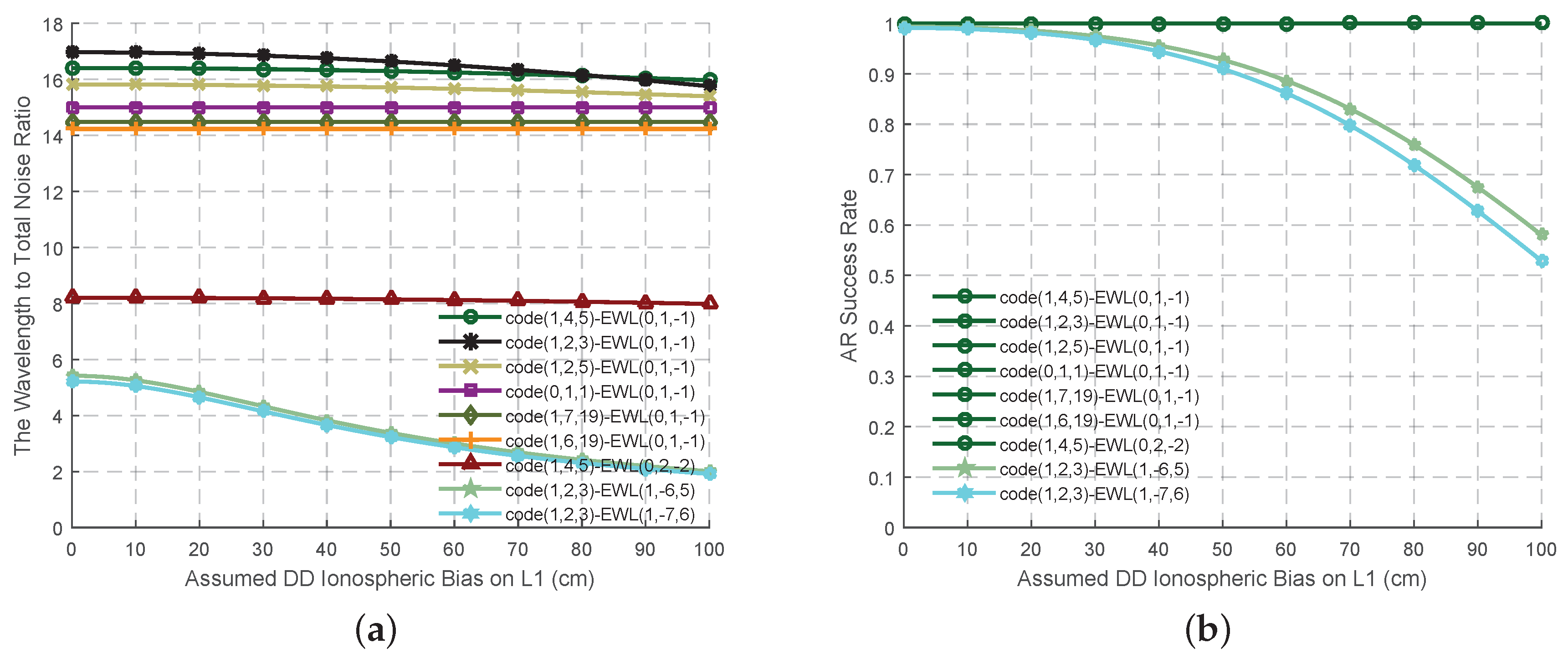
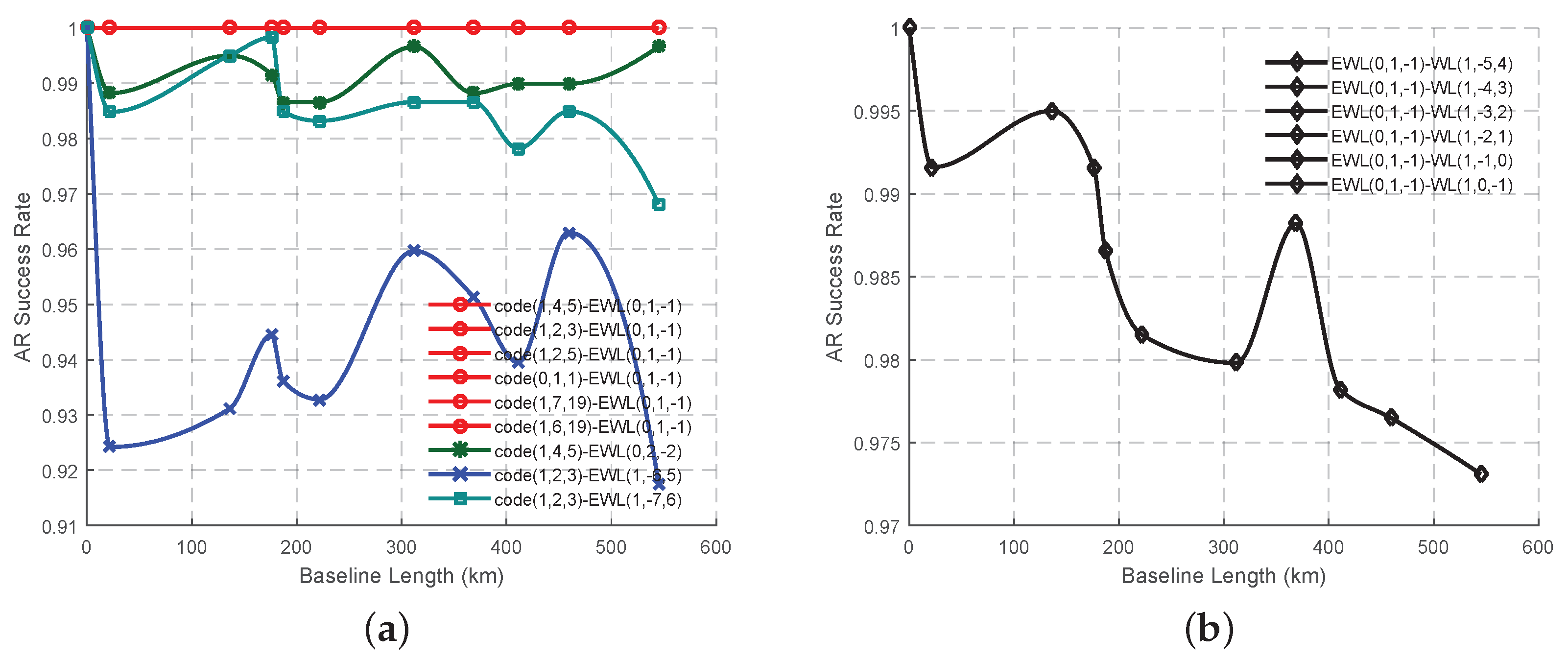
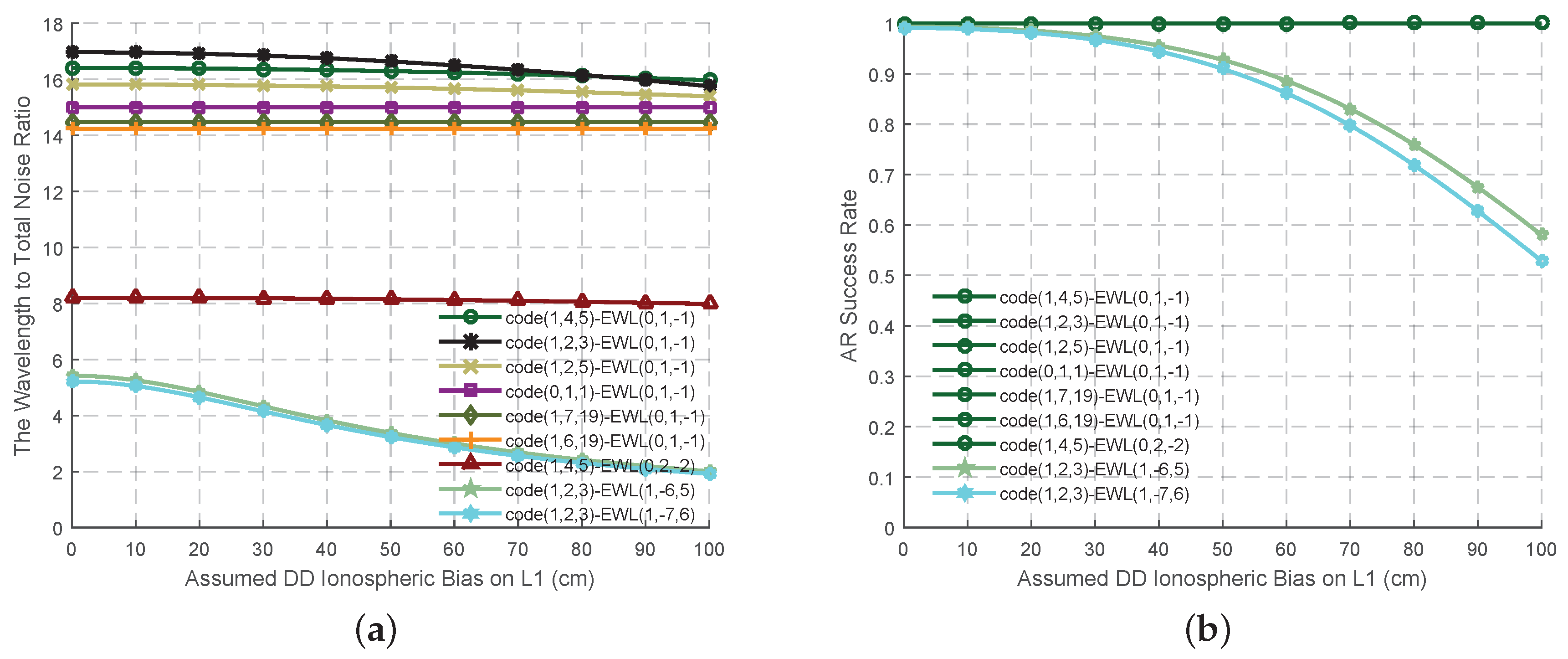
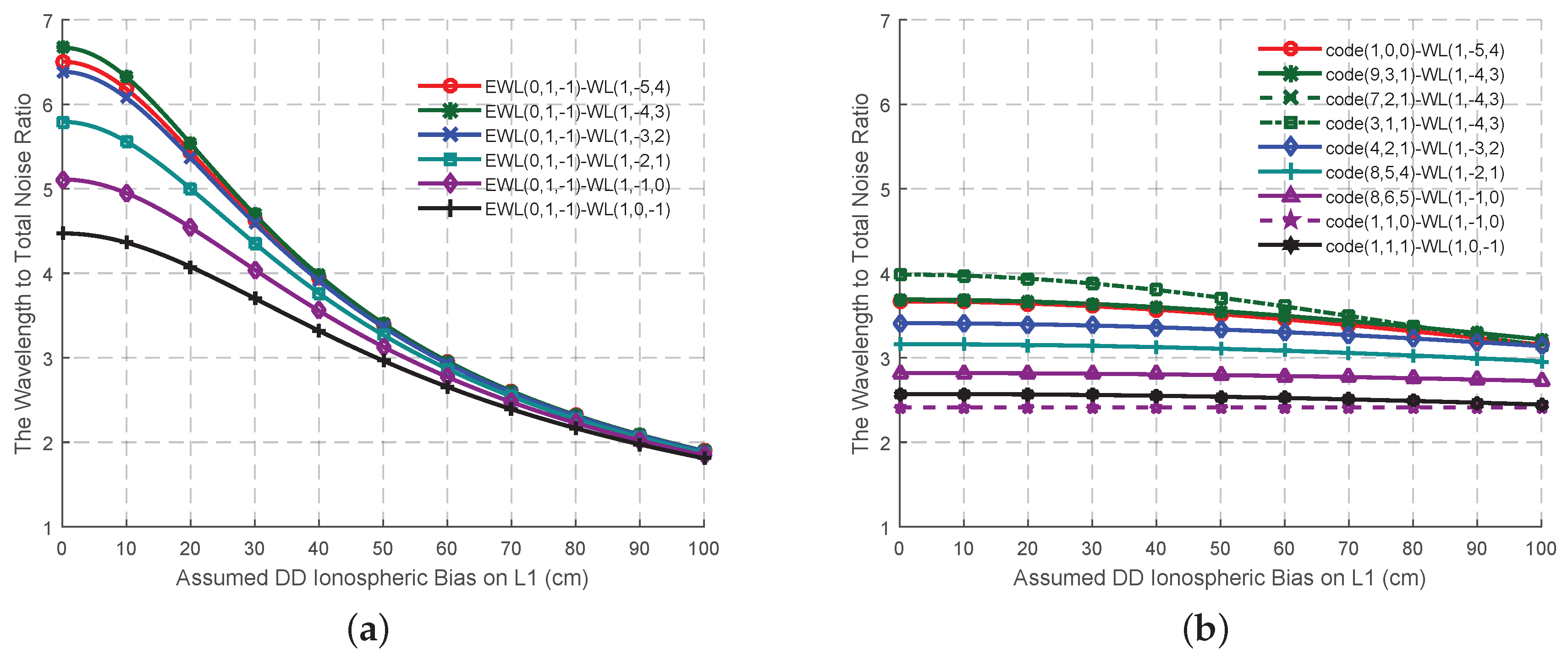
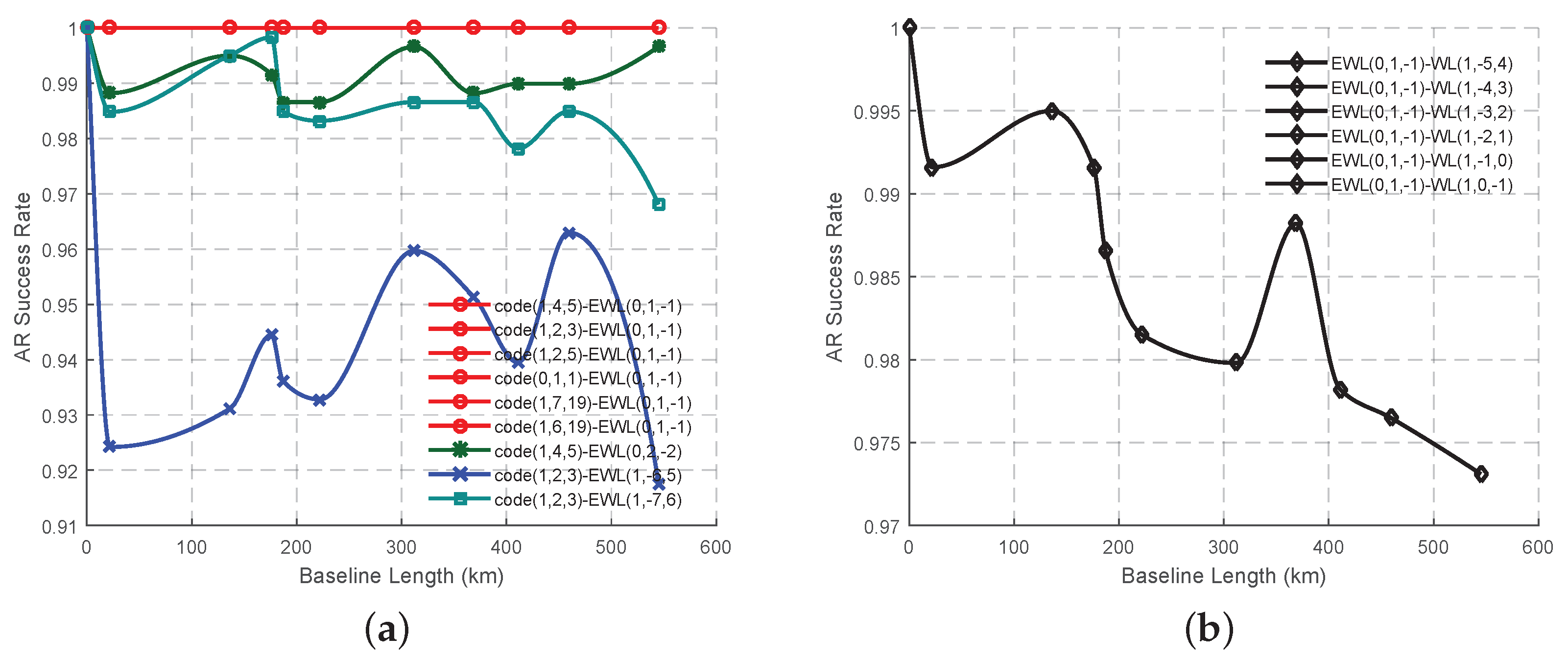
Table 1. Only four EWL phase signals meet the criteria discussed before, while only two of them, EWL(0, 1, −1) and EWL(1, −6, 5) are linear independent. The wavelength to total noise ratio and the AR success rate of all these signal pairs are analyzed in
Figure 2 updating with the ionospheric bias. Compared with EWL(0, 1, −1), the combined signal EWL(1, −6, 5) has a comparable success rate when the ionospheric bias is not high, although the ISFs and the measurement noise are bigger and the wavelength to total noise ratio is smaller. However, the success rate of EWL(1, −6, 5) will decrease significantly with the increase of the ionospheric bias, while EWL(0, 1, −1) still maintains a high success rate. Thus in this study, EWL(0, 1, −1) is selected as the best EWL combined phase signal, which can nearly work well with all the combined code signals. With regards to the ionosphere free aspect and the 100% AR success rate, the signal pair code(0, 1, 1)-EWL(0, 1, −1) is selected as the optimal EWL signal pair as most of the existed papers did, although the measurement noise may be larger and the wavelength to total noise ratio is smaller than some pairs working with some other combined code measurement.
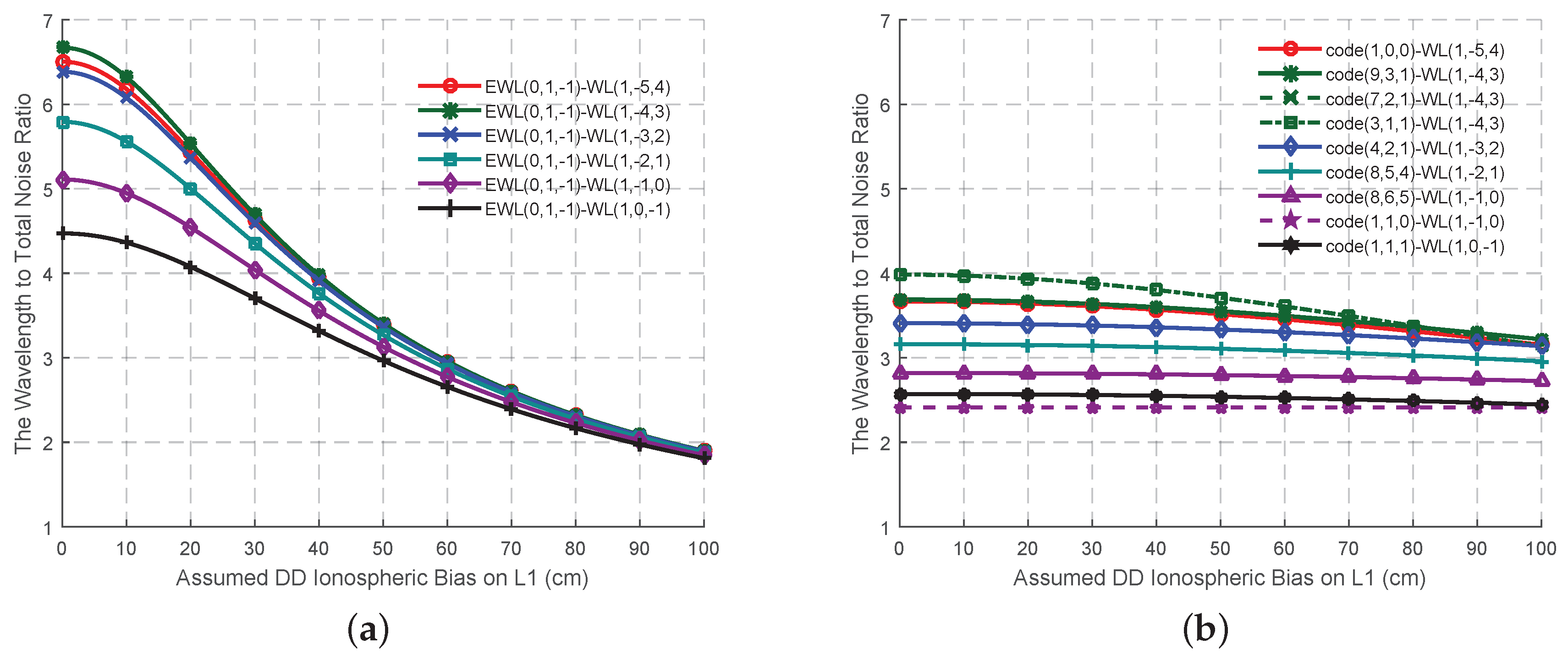
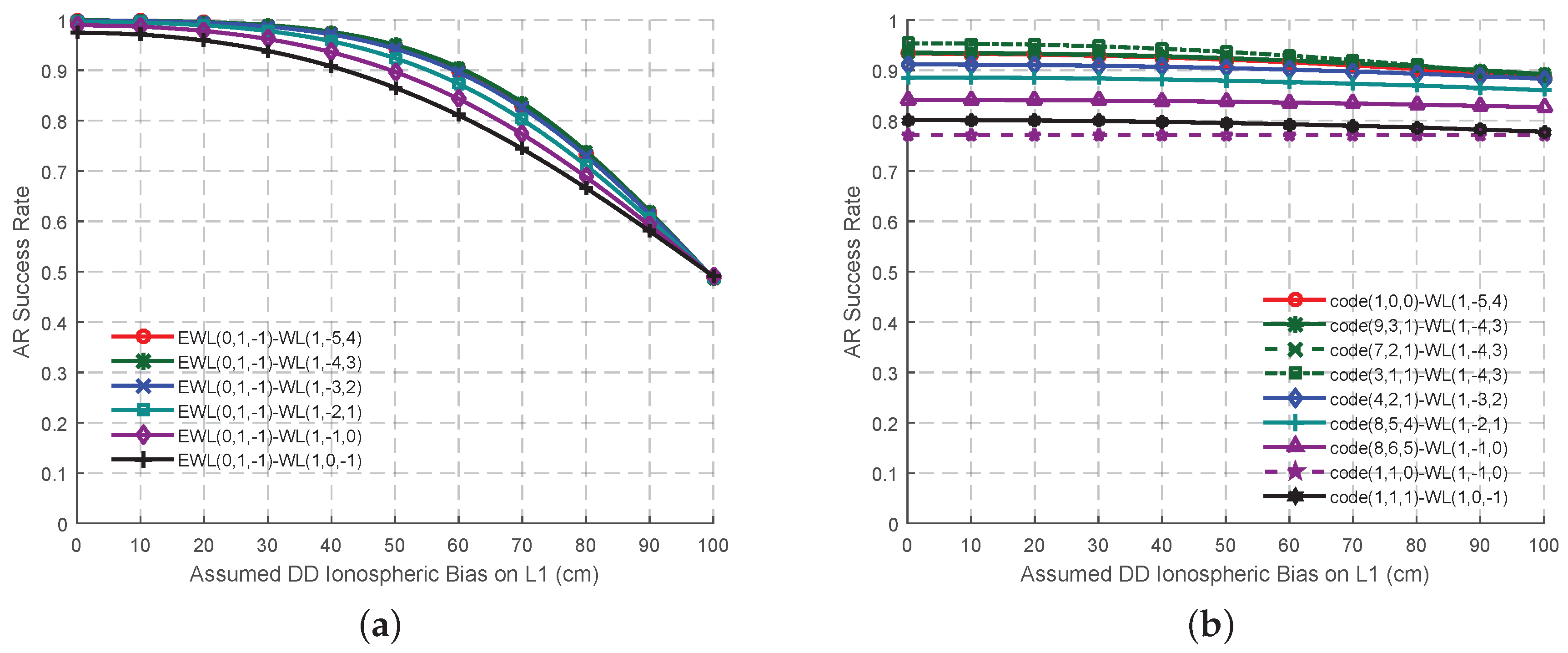
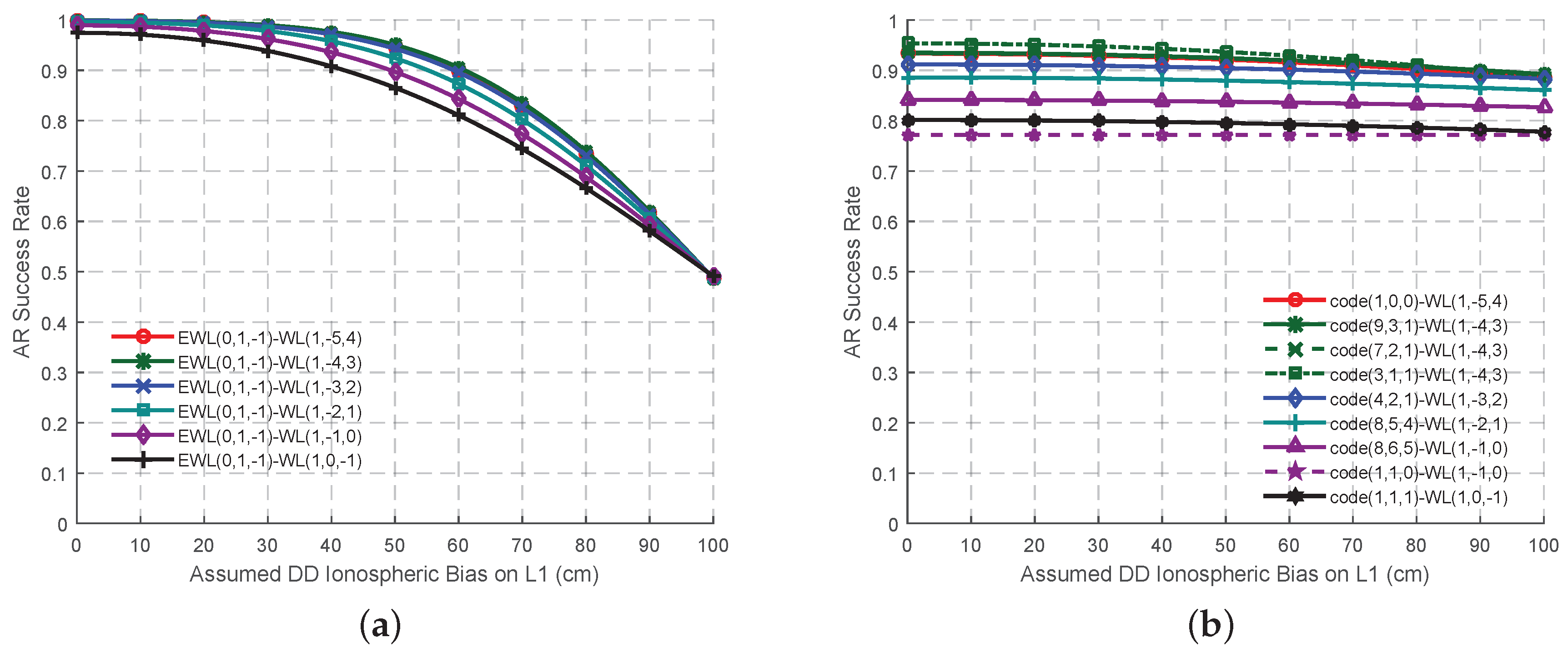
On the basis of the best EWL combined phase signal and the four criteria, six possible WL signals are selected, as shown in
Table 2. When the effect of the ionospheric bias is not as high as the measurement noise, the wavelength to total noise ratios of these signals (
Figure 3a) are all larger than 4, while the AR success rates of these six signal pairs (
Figure 4a) are high and comparable. At this circumstance, the signal pair EWL(0, 1, −1)-WL(1, −4, 3) is supposed to provide the most reliable ambiguities on account of its wavelength to total noise ratio. With the increase of the ionospheric bias, all the wavelength to total noise ratio will decline to less than 2, while all the AR success rate will be no larger than 0.5. Thus at this stage, it is hard to say which signal pair should be selected as the optimal. However this might be due to the incorrect assumptions of the effect of the error sources, especially ionospheric biases [
16]. Two methods are proposed here to solve this problem. One is to be refined with the real data, which will be conducted in the next section. The other adopts combined code signals to work with the WL signals when the ionospheric bias becomes serious, as shown in
Table 3. Compared to the signal pairs in
Table 2, although these in
Table 3 are a little nosier, which lead to a lower wavelength to total noise ratio at the beginning (
Figure 3b), they have a stronger ability to resist the effect of the ionospheric bias as the ISFs are smaller. Thus, the wavelength to total noise ratio and the AR success rate do not decline much with the growth of the ionospheric bias, as shown in
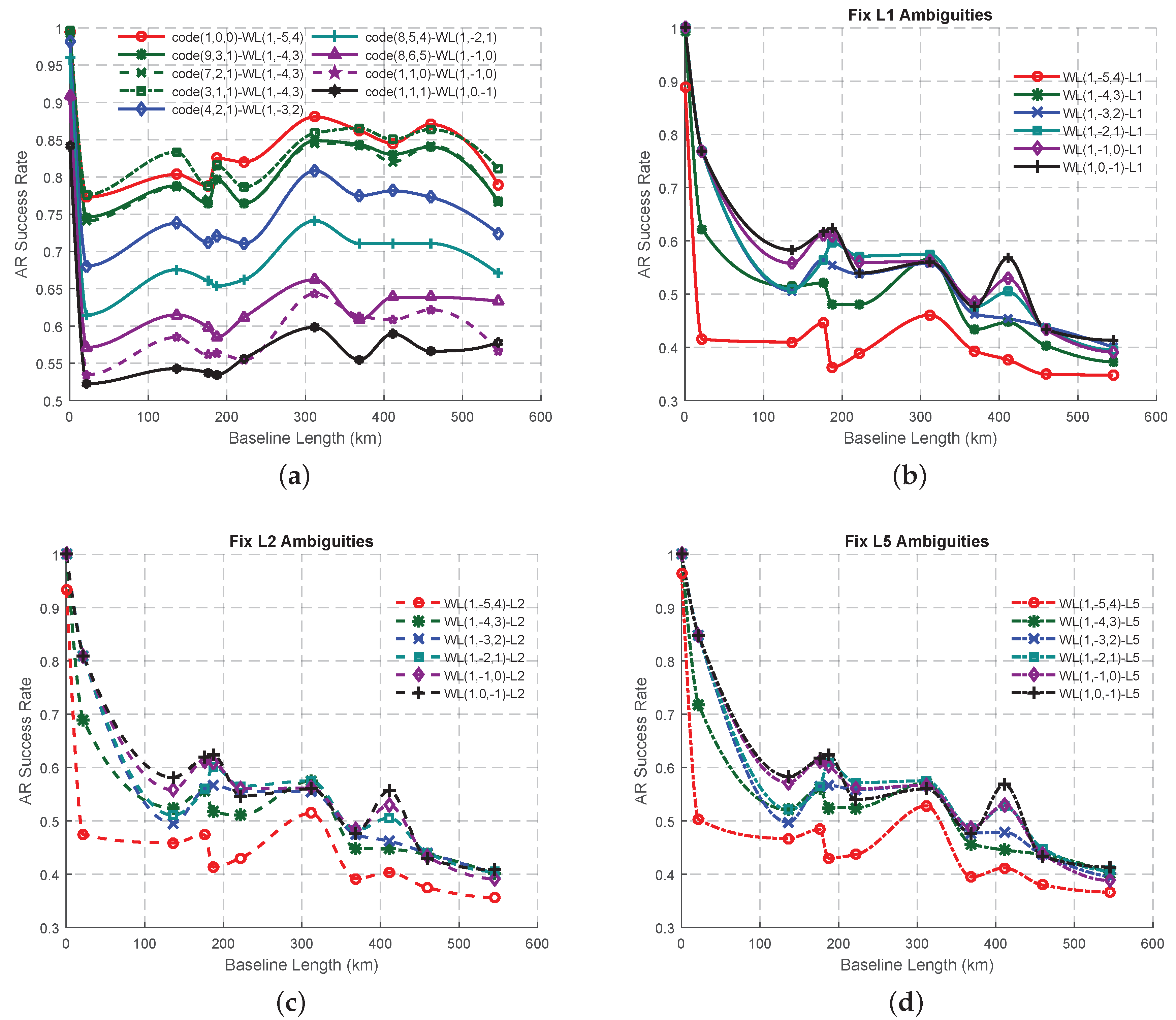
Figure 4b. The signal pairs involved with WL(1, −5, 4), WL(1, −4, 3) and WL(1, −3, 2) can maintain the success rate is larger than 0.9 no matter how serious the ionospheric bias is, which might be acceptable for AR when using smoothing techniques.
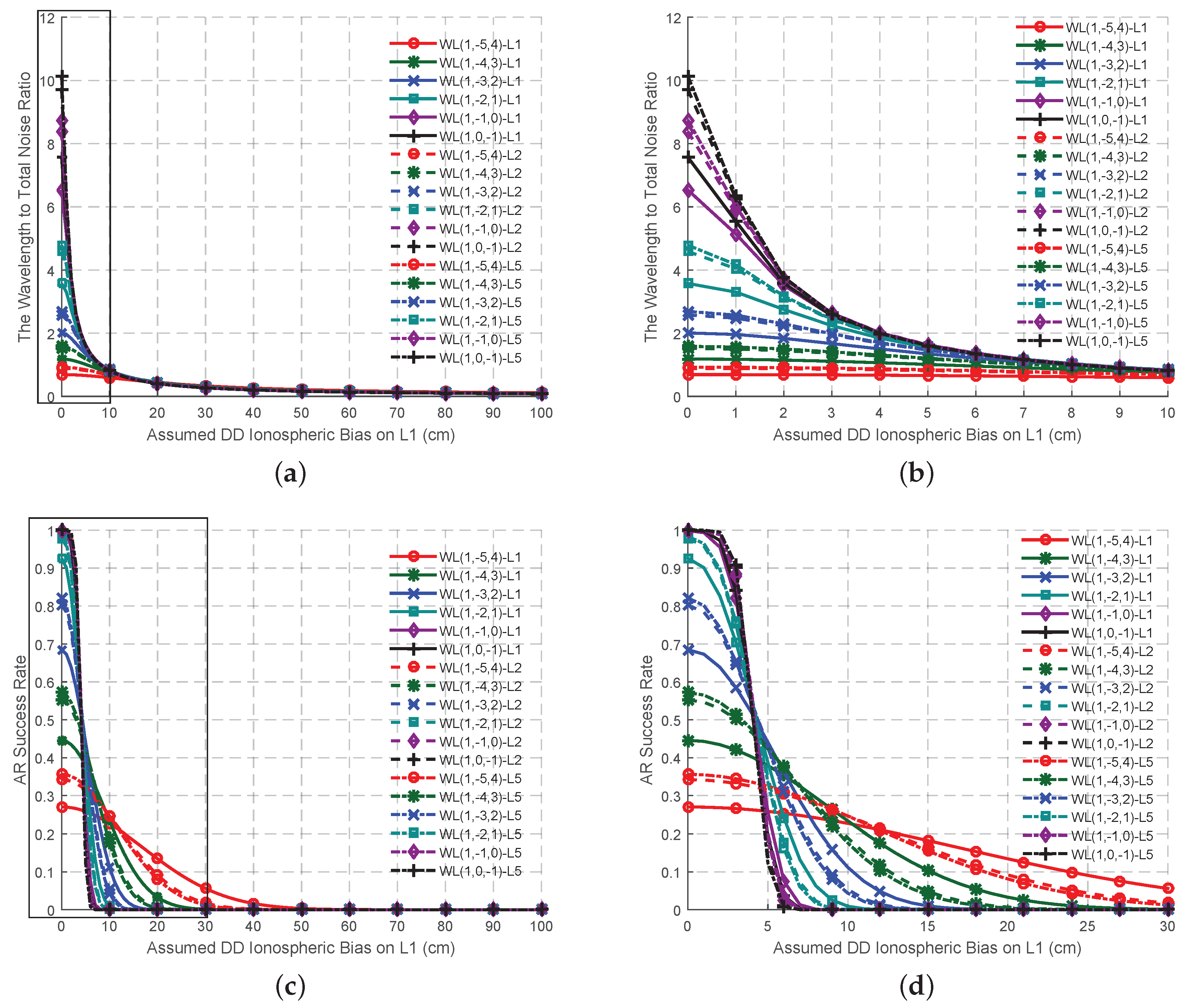
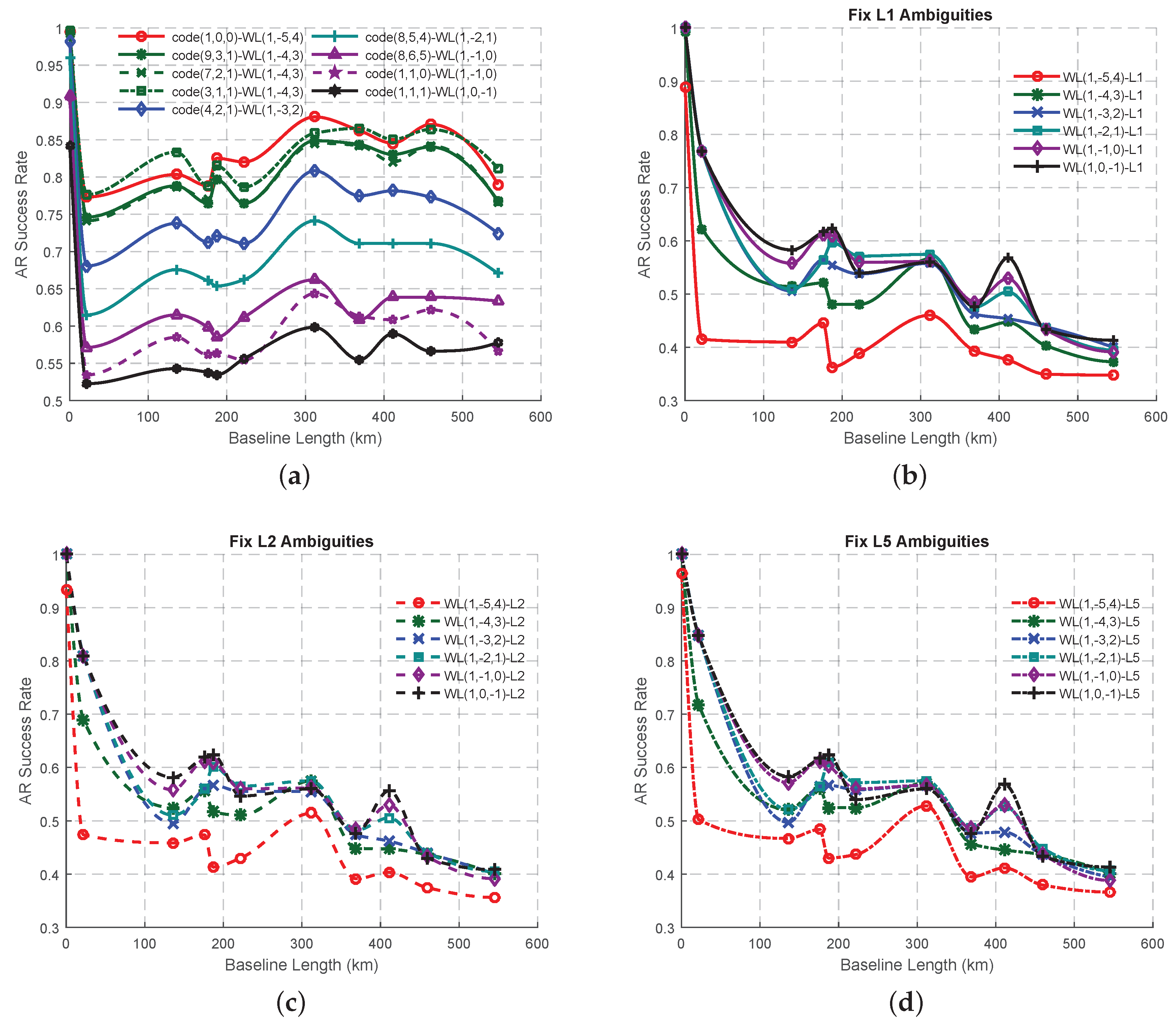
Besides working with EWL ambiguity corrected signals and combined code signals, for WL signals, another considerable aspect is to work with the fundamental signals, whose ambiguities are of the interest when high precise positioning is needed.
Table 4 shows the ISFs and the measurement noise of the WL signals working with the fundamental signals, while the wavelength to total noise ratio and the AR success rate are shown in
Figure 5a,c and partly amplified in
Figure 5b,d updating with the DD ionospheric bias on L1. When the affect level of the DD ionospheric bias is less than approximate 2 cm, the signal pairs, WL(1, −1, 0) and WL(1, 0, −1), are clearly at a priori stage to be adopted as the optimal, on account of the high wavelength to total noise ratio and AR success rate. However it is not easy to decide the ambiguity of which fundamental signal should be solved first as both the wavelength to total noise ratio and the success rate are similar for a certain WL signal. When the effect of the DD ionospheric bias increases, both the wavelength to total noise ratio and the AR success rates of all the signal pairs decline significantly into a value near zero, making it difficult to decide the optimal signal pair for AR. The bad AR performances of WL-single signal pairs might be because of the high ISFs of these signal pairs, as well as the incorrect assumptions problem, which will be tested in the next section in order to select the optimal WL phase signal and the corresponding signal pair. Here we also find that there is a strong correlation (0.9337), between the wavelength to total noise ratio and AR success rate. In order to obtain a 100% success rate, the approximate wavelength to total noise ratio should be larger than 8.
2.2.2. Theoretical Selection of Combined Signals for GB TCAR
As the first step of GB TCAR adopts a GF process, whose optimal EWL phase signal has been theoretically selected, the main aim of this subsection is to determine two extra combined signals, which should be linearly independent from EWL(0, 1, −1). These combined signals can be chosen from EWL, WL, middle-lane (ML, 0.19 m
0.75 m) or narrow-lane (NL,
m) signals, considering the following three criteria, wavelength, ISF and the measurement noise, and the wavelength to total noise ratio. The wavelength is adopted to allocate the classification of the combined signals. The ISF and measurement noise (
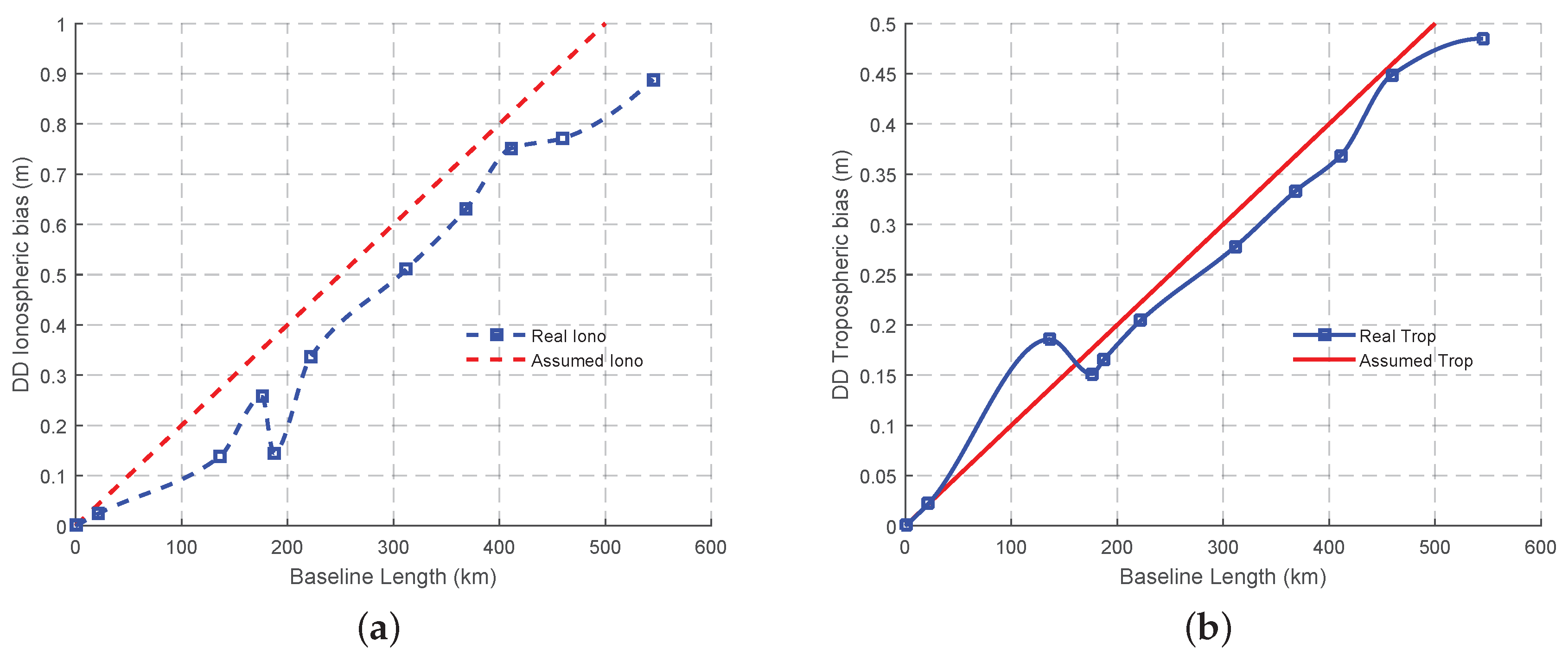
) will be collaboratively considered in order to select the optimal combined signals with the updating of the frequency dependent error sources, mainly ionospheric biases. On the basis of PNF and the assumption for the DD L1 carrier phase noise, the measurement noise can be calculated with Equation (29). Different from the GF method, GB TCAR cannot eliminate either the frequency dependent error sources or the frequency independent ones, including the satellite orbit error and the tropospheric bias. In this study, the tropospheric bias is assumed to be linearly increased from 0 to 50 cm with the increase of the baseline length, while the orbit error is from 1 to 8 cm [
13]. The wavelength to total noise ratio, which can be calculated with Equations (30) and (31), is adopted in order to consider all the error sources in the determination of the optimal combined signals for GB TCAR. With regards to the correlation between the wavelength to total noise ratio and the AR success rate, the larger of the wavelength to total noise ratio is, the higher of the success rate will be. Therefore the optimal combined signals should have the largest wavelength to total noise ratio.
Figure 6 summarizes the procedure of selecting the optimal signals for GB TCAR using these criteria.
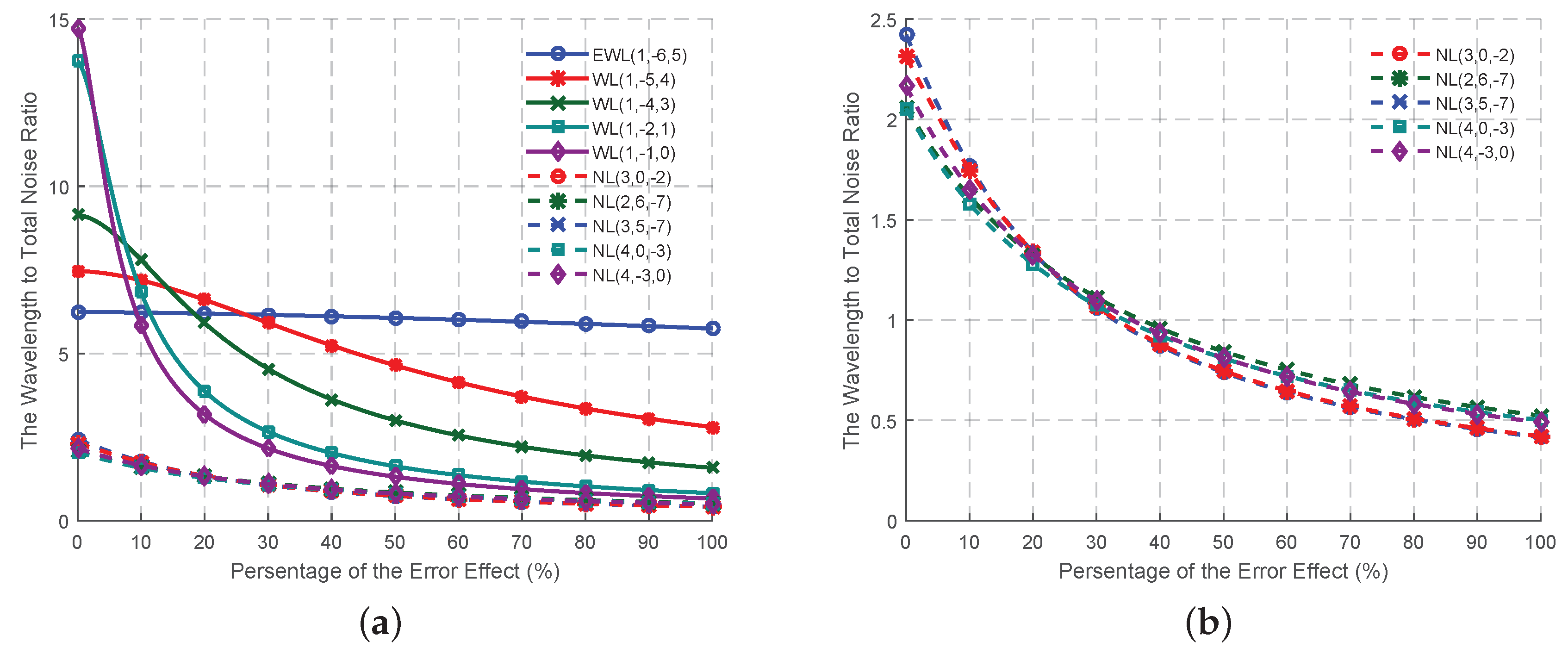
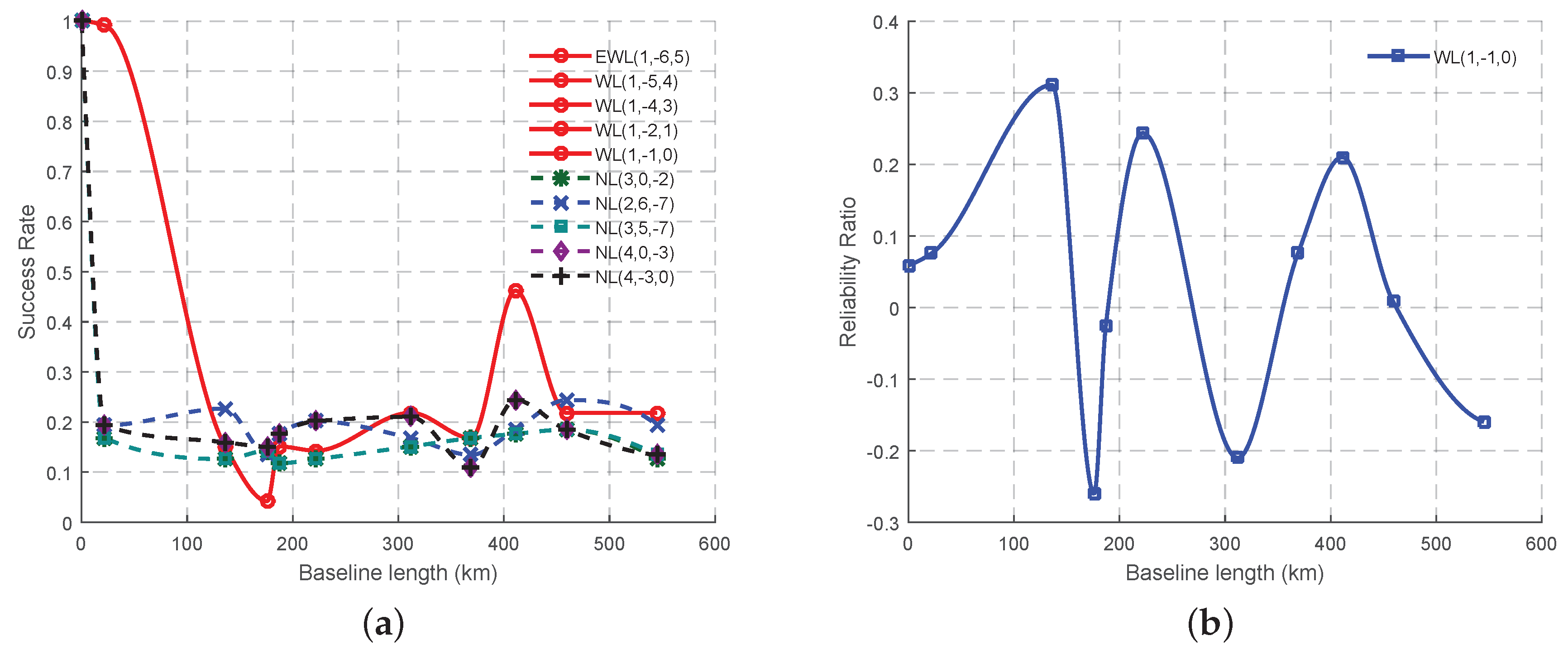
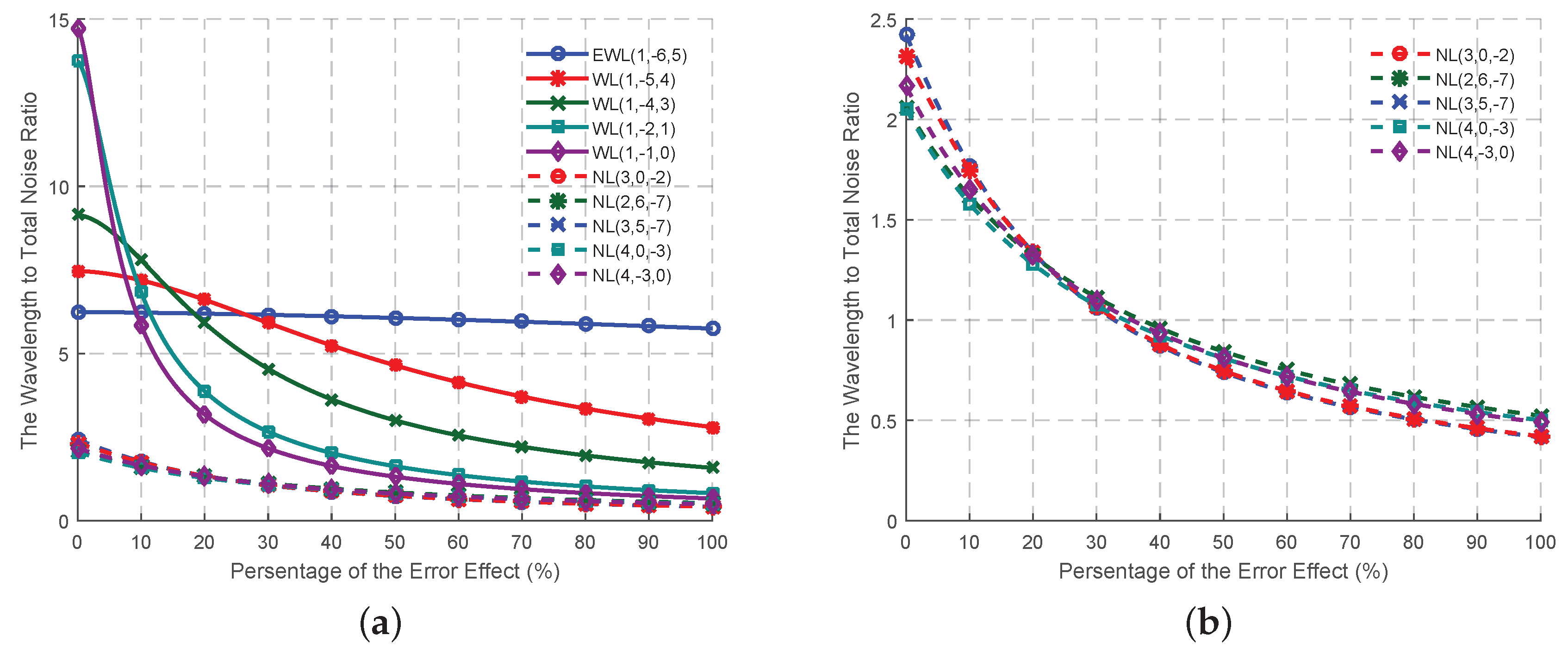
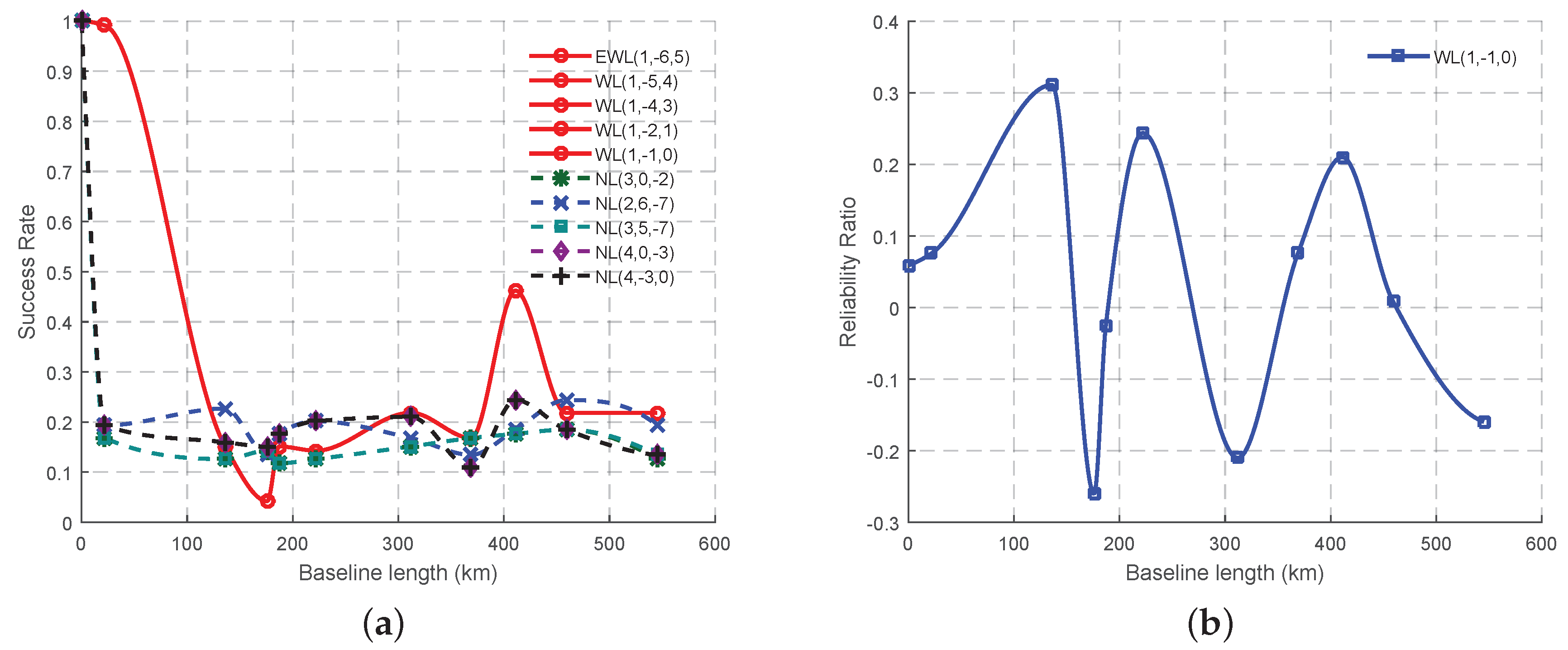
With regards to the former three criteria, ten combined signals, including five EWL/WL signals and five NL signals, are selected, as shown in
Table 5. It is impossible to find a combined signal with the smallest ISF, as well as the smallest measurement noise at the same time. However, obviously the wavelength to total noise ratios of the five EWL/WL signals are always larger than those of the NL signals, as shown in
Figure 7. We can select only one EWL/WL signal, since none will be independent from the EWL(0, 1, −1) once any of those five signals is chosen. WL(1, −1, 0) is the best signal when the affect of the ionospheric bias, the tropospheric bias and the orbit error are weak. With the increase of the affect of these error sources, each of the five EWL/WL signals has its own period with the best AR performance, while EWL(1, −6, 5) can maintain its performance. The wavelength to total noise ratios of the NL signals are quite similar to each other. NL(3, 0, −2) is the best until the percentage of the error affect exceeds 25. After that, NL(3, 5, −7) performs a little better than any of the others. However, it should be noted that the differences of the wavelength to total noise ratio of all the NL signals are not so obvious, that any one of these five NL signals can have the best performance when using the real data.



 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}