
Indoor Location Sensing with Invariant Wi-Fi Received Signal Strength Fingerprinting


Abstract
:1. Introduction
- A new method is introduced by resorting to invariant RSS statistics as the reference in fingerprinting, together with the effective RSS readings chosen as input data, which make the proposed fingerprinting accurate and robust against random spatiotemporal disturbances.
- The automatic removal of ineffective Wi-Fi signal sources in the process of soliciting effective RSS readings makes the proposed method efficient in fingerprinting with the in-situ reduction in the dimensions of decision space.
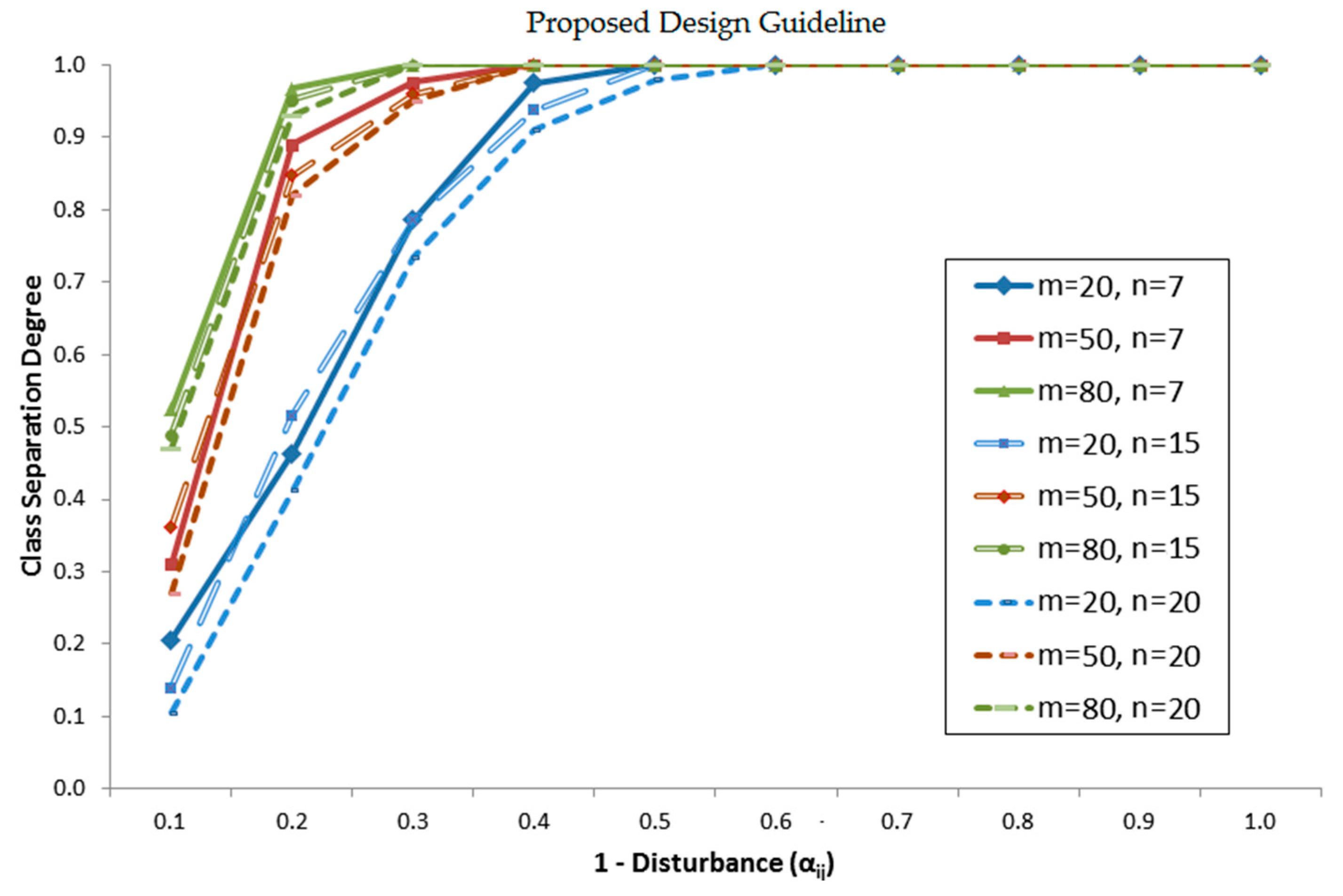
- A proposed design guideline is presented as a rule of thumb for estimating the number of Wi-Fi signal sources required to be available for any given number of calibration locations under a certain level of random spatiotemporal disturbances. This will serve as a key guideline for the benefits of the society who wish to employ invariant RSS-based indoor localization using Wi-Fi fingerprinting.
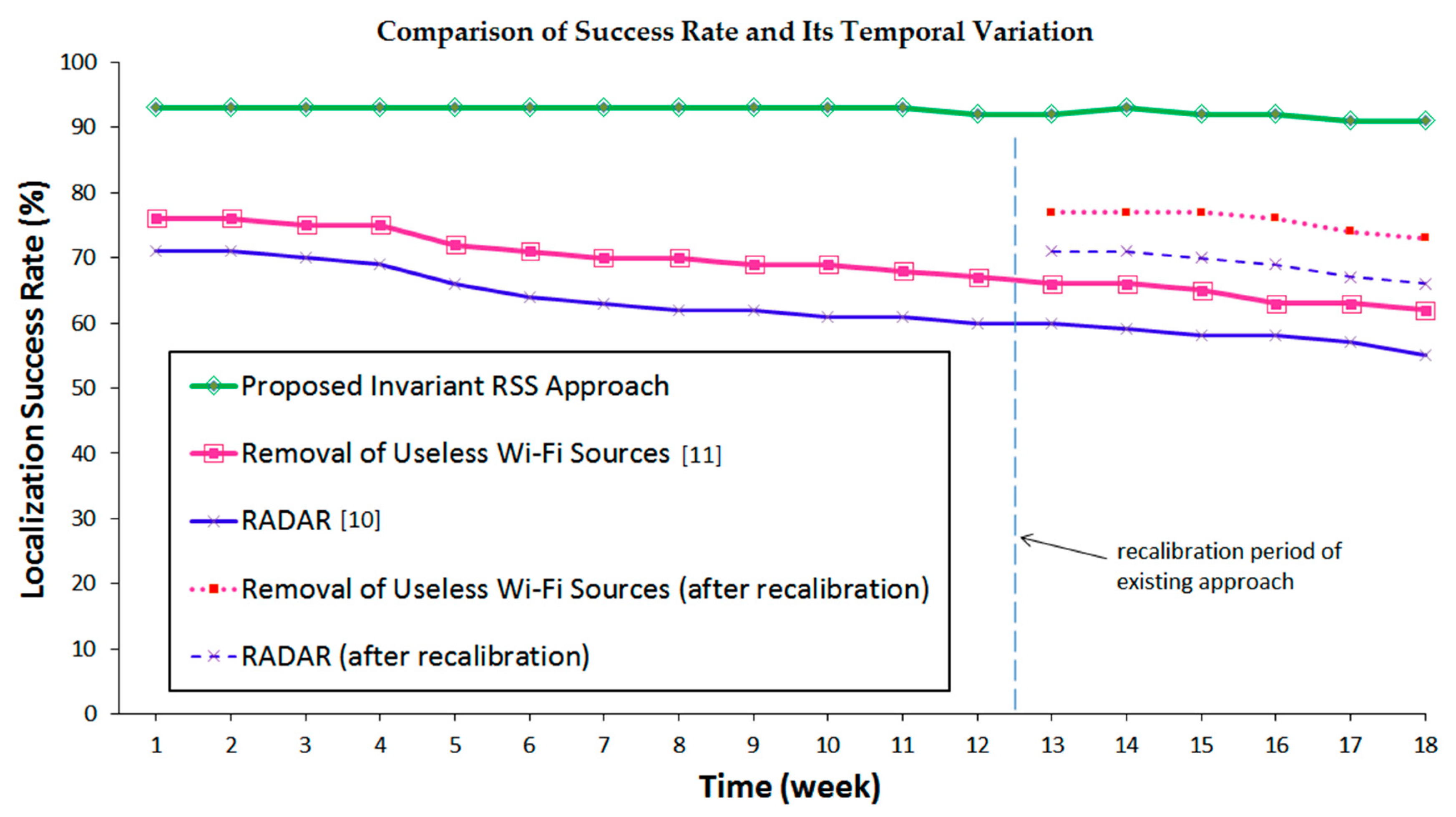
- Our method requires no recalibration once the invariant RSS statistics are set initially, unlike conventional methods which require recalibration after a certain period of time. This contributes better localization success rate with stable performance in time.
2. Related Work
3. Methodology
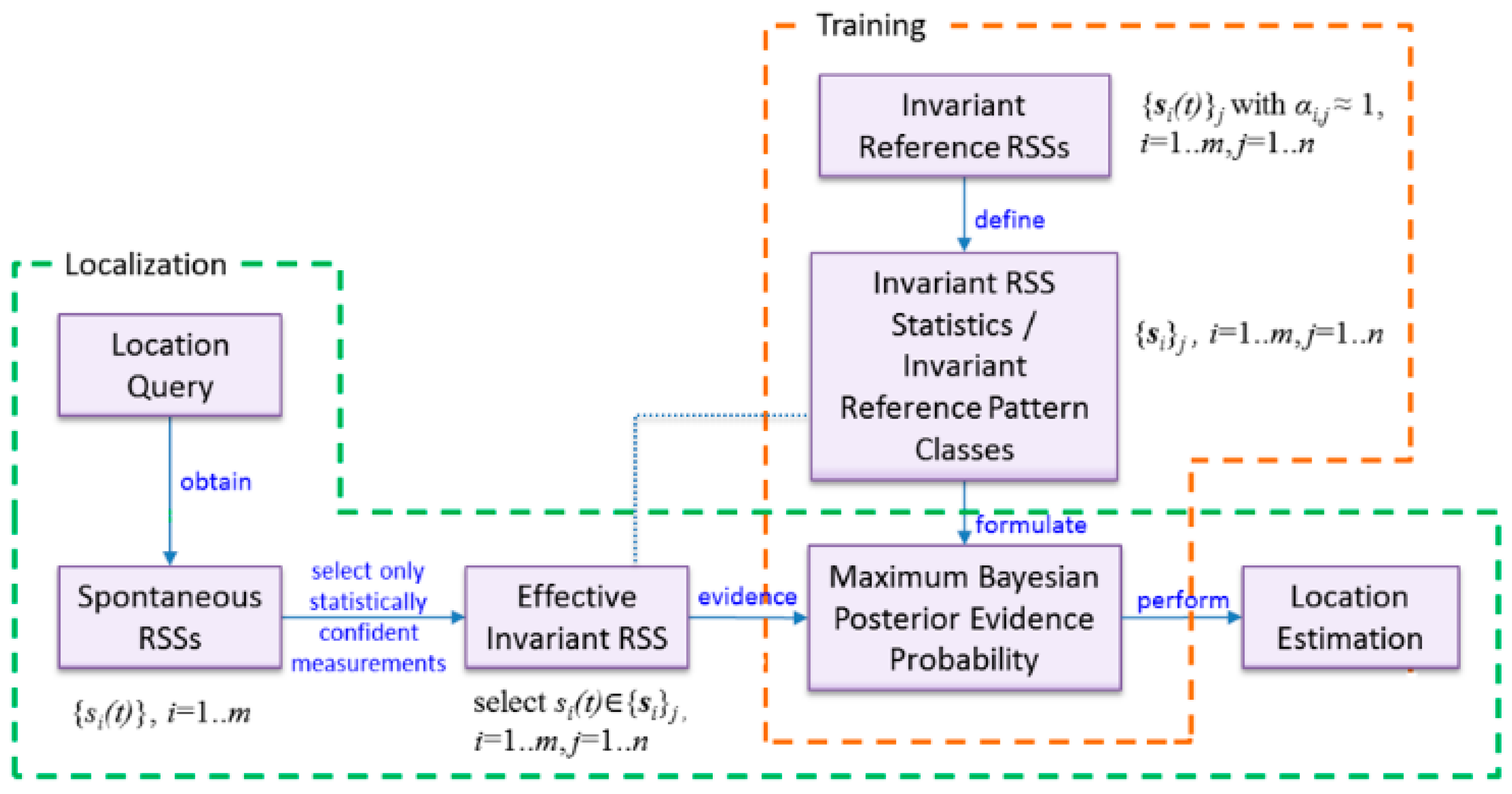
3.1. Invariant Wi-Fi RSS Method
| Algorithm 1. Pseudocode of the localization phase in estimating the user’s location based on real-time spontaneous sensed Wi-Fi RSS vector. |
| Input: Spontaneous RSS Vector Measurement {si(t)} Output: Estimated Location L∈{1,..,n} |
| 1: m ← Number of Wi-Fi Sources |
| 2: n ← Number of Calibration Locations |
| 3: si,j ← A component of {si}j, representing Invariant RSS Pattern for the ith Wi-Fi source at Calibration Location j |
| 4: σ(si,j) ← Standard Deviation of si,j |
| 5: ξσ(si,j) ← Decision Margin |
| 6: for j = 1 to n do |
| 7: for i = 1 to m do |
| 8: if si(t) ∈ si,j, i.e., |si(t) - Mean of si,j | < ξσ(si,j) then |
| 9: Either sum(j) ← sum(j) + 1 or sum(j) ← sum(j) + Pr(si(t)| si,j) |
| 10: end if |
| 11: end for |
| 12: if sum(j) > Maximum (default: Maximum = 0.0) then |
| 13: Maximum = sum(j) |
| 14: L ← j |
| 15: else if sum(j)= Maximum then |
| 16: L ← 0 |
| 17: end if |
| 18: end for |
| 19: if L = 0 then |
| 20: Reject and Recapture Signals |
| 21: end if |
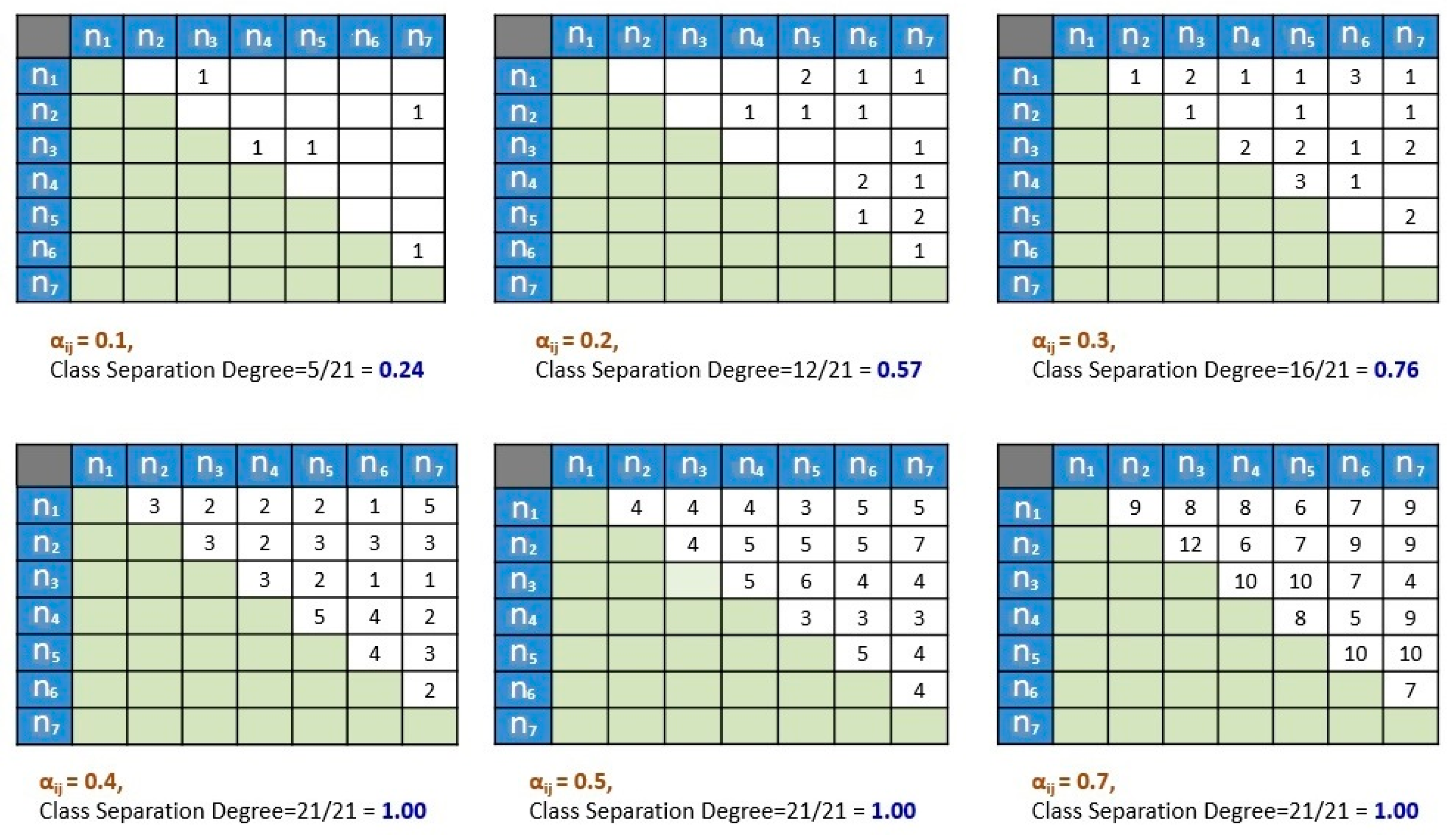
3.2. Design Guideline of Invariant RSS Based Wi-Fi Fingerprinting
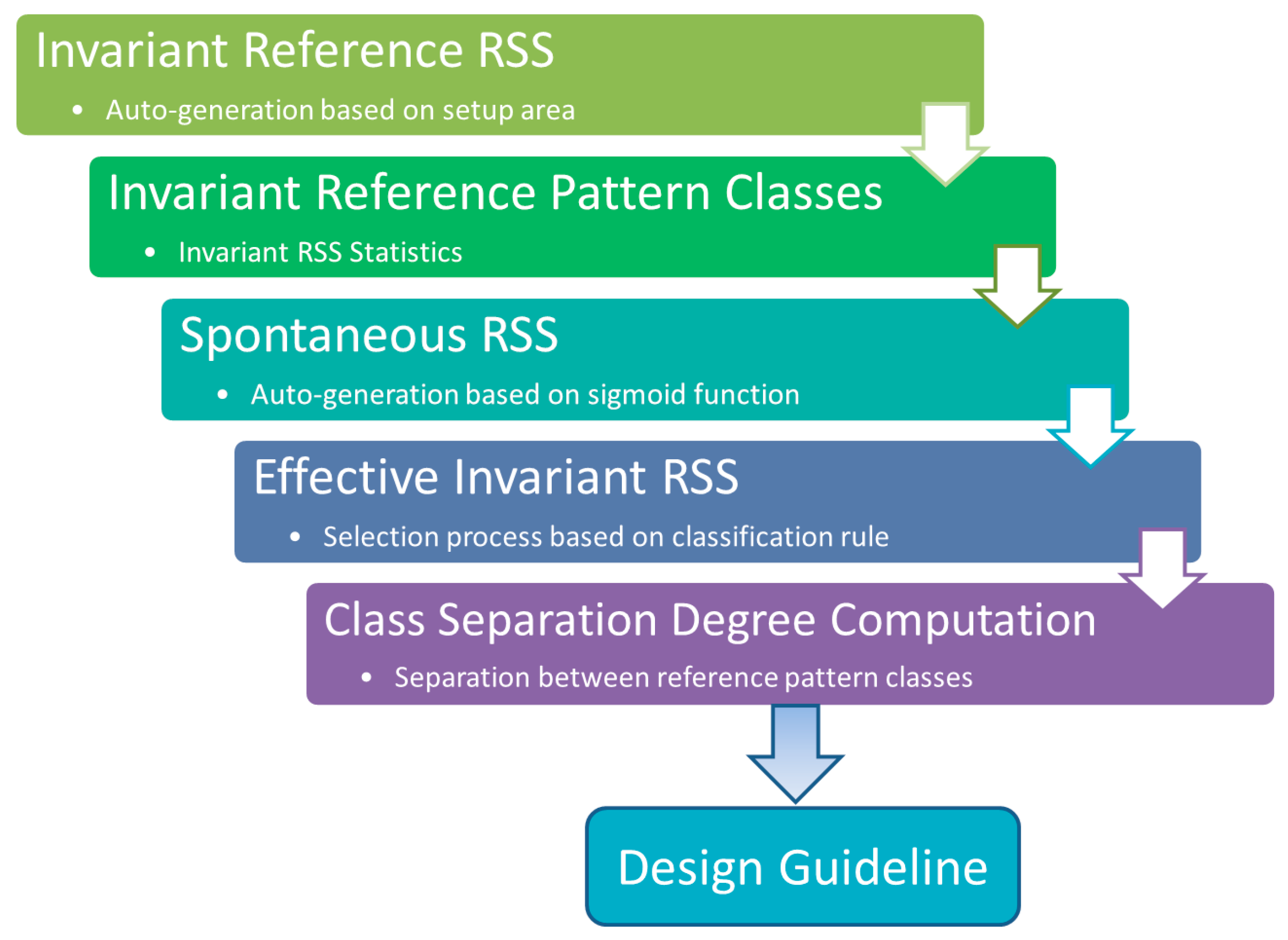
3.2.1. Design Guideline Development Procedure
3.2.2. Proposed Design Guideline
4. Evaluation and Results
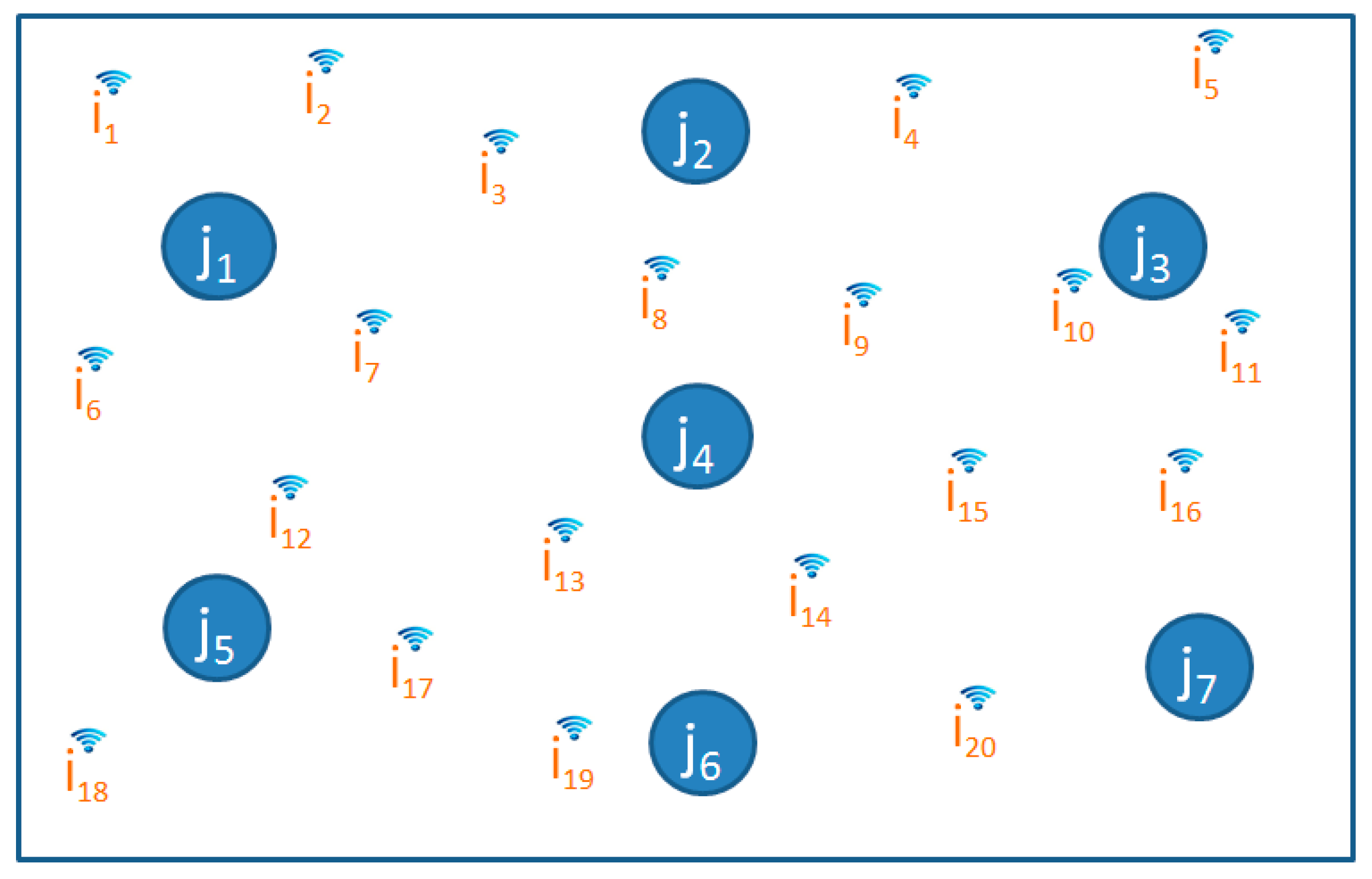
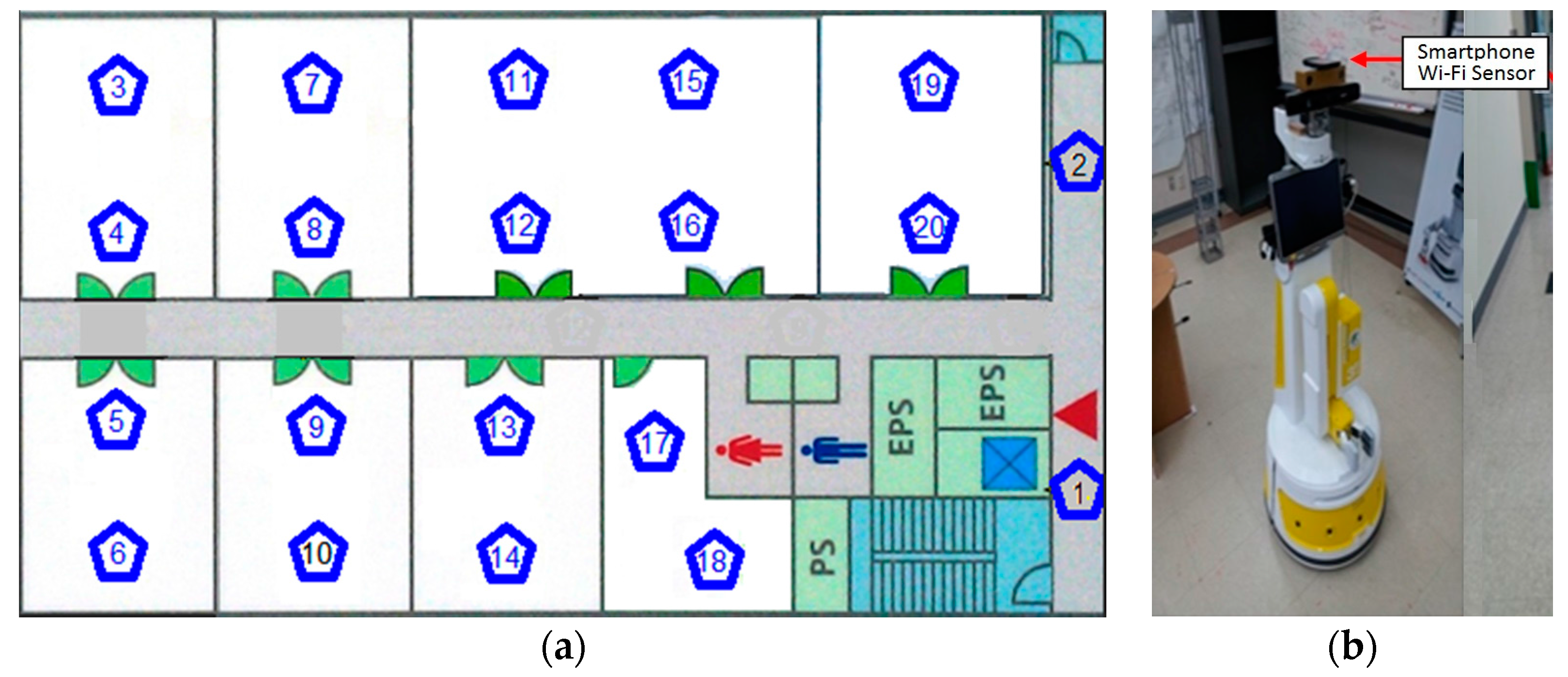
4.1. Experimental Setup
4.2. Comparison of Success Rate and Its Temporal Variation
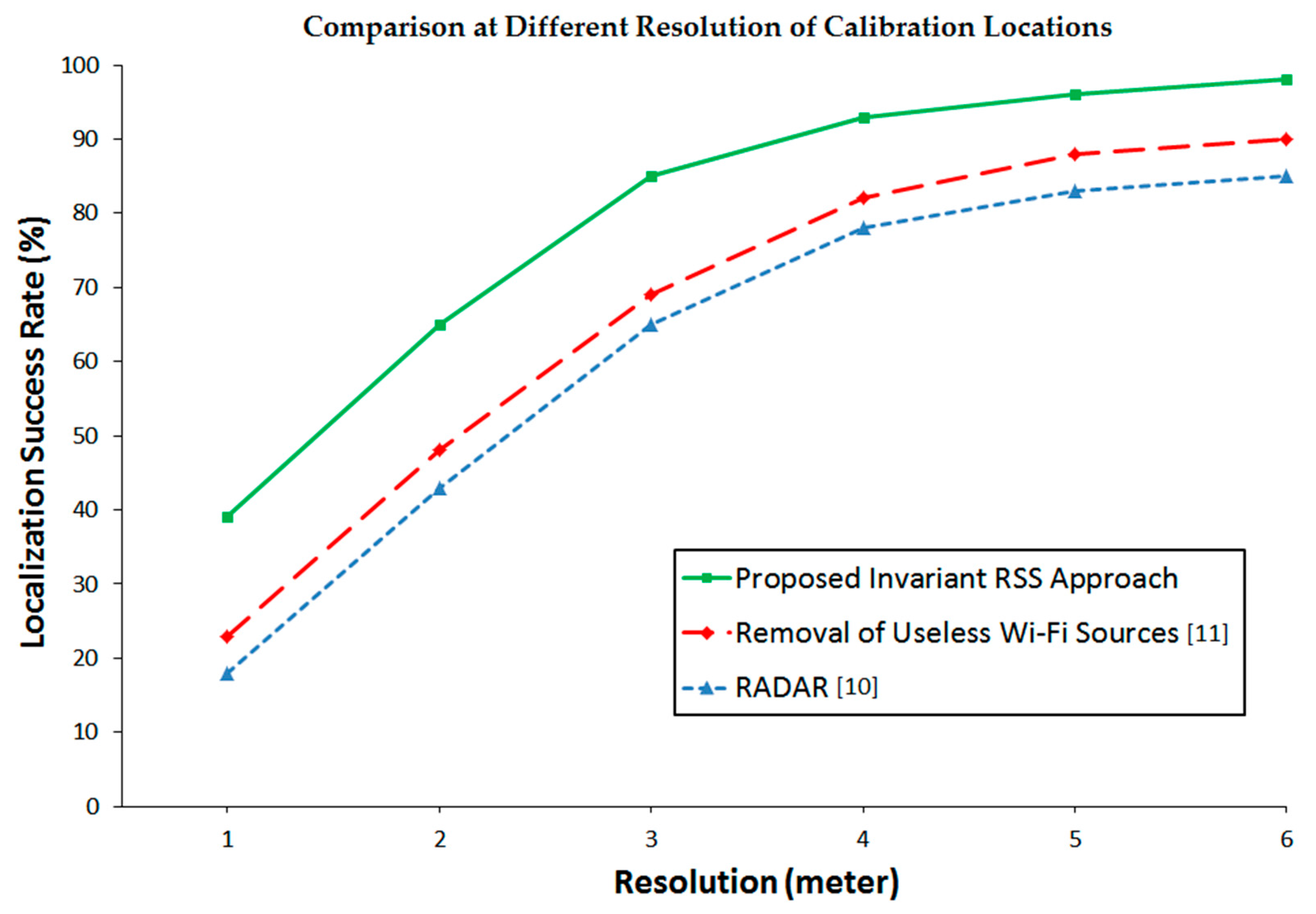
4.3. Comparison of Success Rate at Different Resolution of Calibration Locations
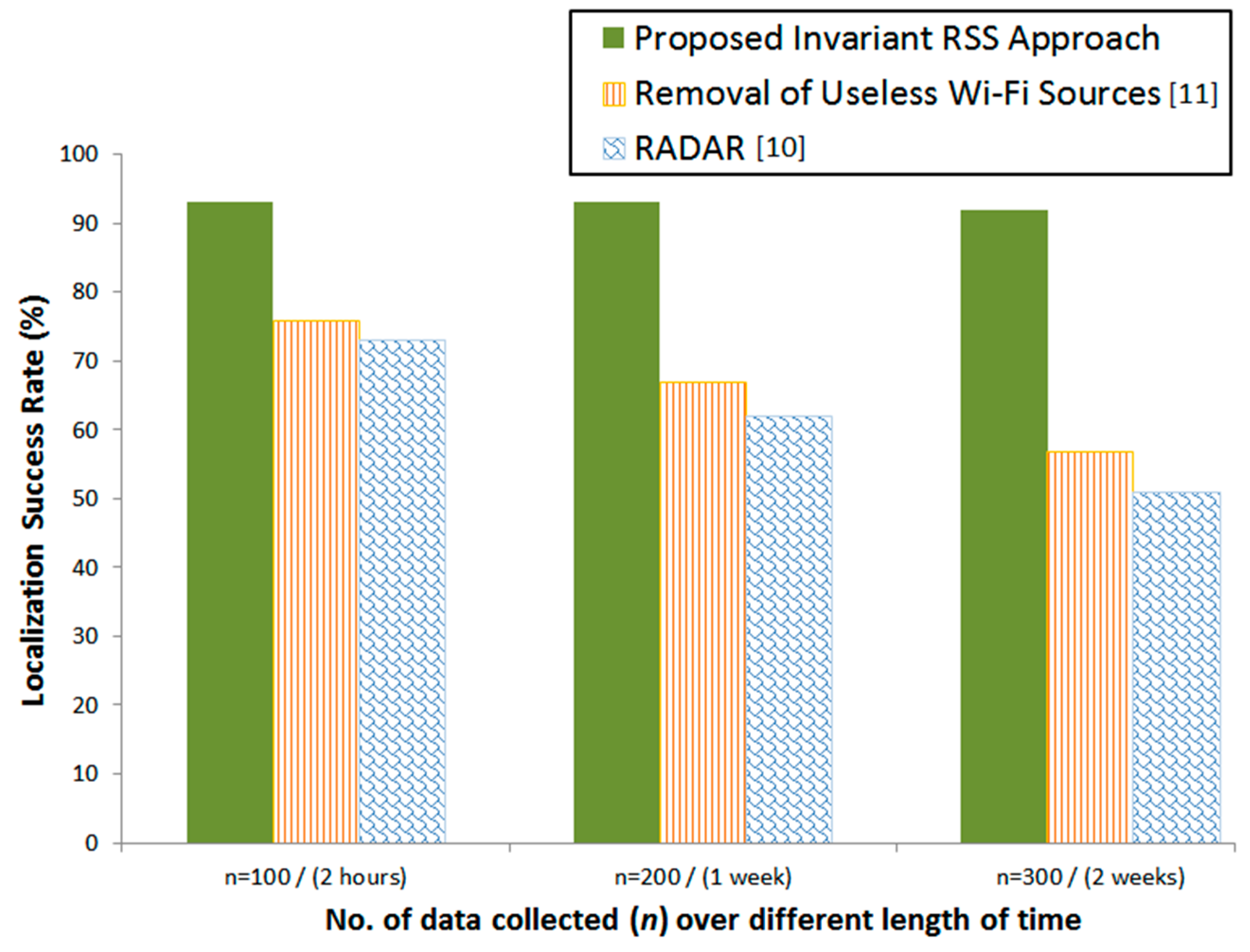
4.4. Comparison of Performance from Samples Collected over Different Length of Time
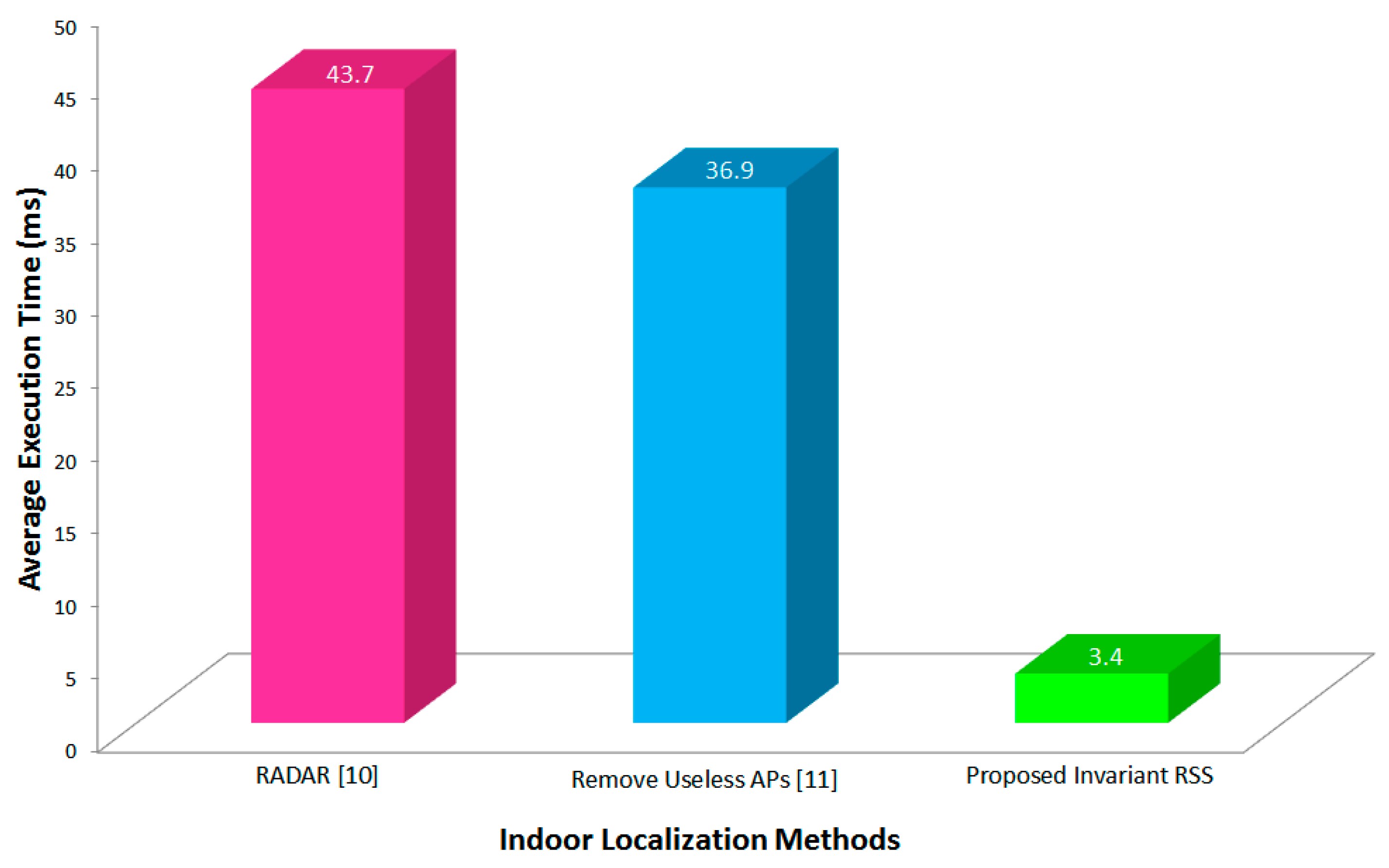
4.5. Computational Complexity Analysis
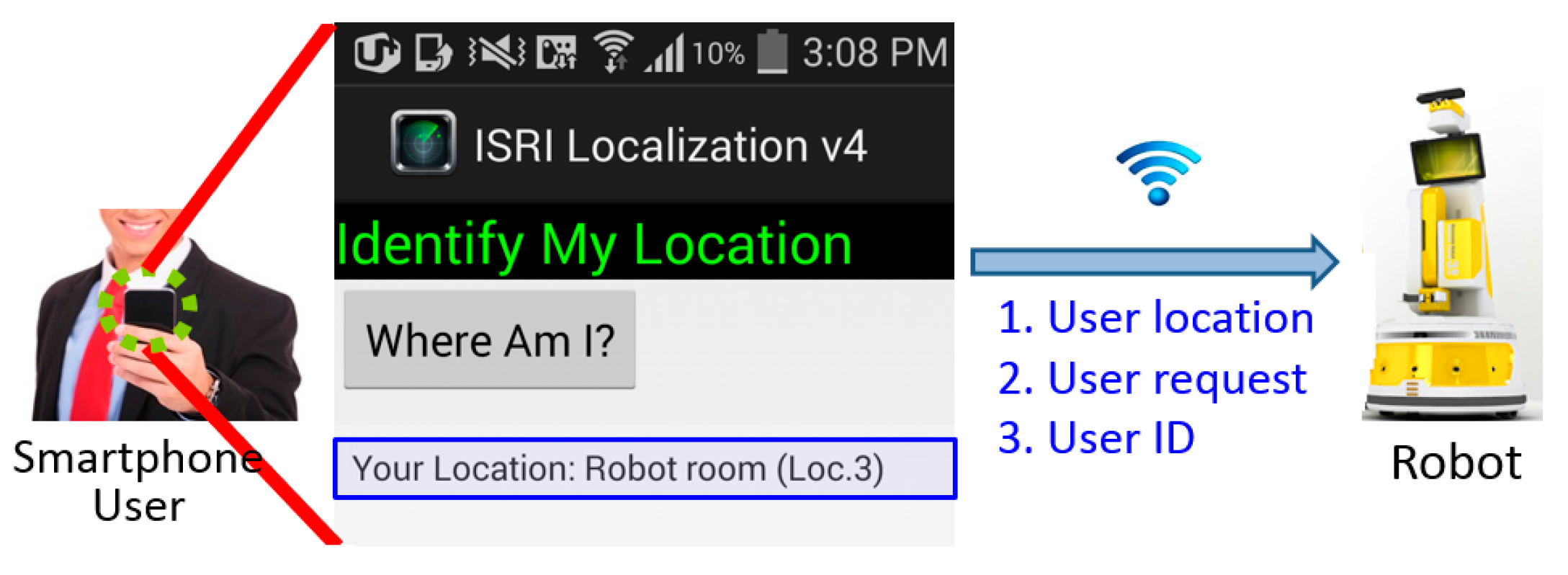
4.6. Application Model Implementation
5. Theoretical Analysis
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Medina, C.; Segura, J.C.; De la Torre, A. Ultrasound Indoor Positioning System Based on a Low-Power Wireless Sensor Network Providing Sub-Centimeter Accuracy. Sensors 2013, 13, 3501–3526. [Google Scholar] [CrossRef] [PubMed]
- Zhuang, Y.; Yang, J.; Li, Y.; Qi, L.; El-Sheimy, N. Smartphone-Based Indoor Localization with Bluetooth Low Energy Beacons. Sensors 2016, 16. [Google Scholar] [CrossRef] [PubMed]
- Ni, L.M.; Liu, Y.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor Location Sensing Using Active RFID. Wirel. Netw. 2004, 10, 701–710. [Google Scholar] [CrossRef]
- Lee, S.; Ha, K.N.; Lee, K.C. A Pyroelectric Infrared Sensor-based Indoor Location-Aware System for the Smart Home. IEEE T. Consum. Electr. 2006, 52, 1311–1317. [Google Scholar] [CrossRef]
- Gezici, S.; Tian, Z.; Giannakis, G.B.; Kobayashi, H.; Molisch, A.F.; Poor, H.V.; Sahinoglu, Z. Localization via Ultra-Wideband Radios: A Look at Positioning Aspects for Future Sensor Networks. IEEE Signal Proc. Mag. 2005, 22, 70–84. [Google Scholar] [CrossRef]
- Zhao, Y.; Dong, L.; Wang, J.; Hu, B.; Fu, Y. Implementing Indoor Positioning System via ZigBee Devices. In Proceedings of the 42nd Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 26–29 October 2008; pp. 1867–1871.
- Deng, Z.; Wang, G.; Qin, D.; Na, Z.; Cui, Y.; Chen, J. Continuous Indoor Positioning Fusing WiFi, Smartphone Sensors and Landmarks. Sensors 2016, 16, 1427. [Google Scholar] [CrossRef] [PubMed]
- Curran, K.; Furey, E.; Lunney, T.; Santos, J.; Woods, D.; McCaughey, A. An Evaluation of Indoor Location Determination Technologies. J. Locat. Based Serv. 2011, 5, 61–78. [Google Scholar] [CrossRef]
- Kaemarungsi, K.; Krishnamurthy, P. Analysis of WLAN’s Received Signal Strength Indication for Indoor Location Fingerprinting. Pervasive Mob. Comput. 2012, 8, 292–316. [Google Scholar] [CrossRef]
- Bahl, P.; Padmanabhan, V.N. RADAR: An In-building RF-based User Location and Tracking System. In Proceedings of the IEEE 19th International Conference on Computer Communications, Tel Aviv, Israel, 26–30 March 2000; pp. 775–784.
- Eisa, S.; Peixoto, J.; Meneses, F.; Moreira, A. Removing Useless APs and Fingerprints from WiFi Indoor Positioning Radio Maps. In Proceedings of the IEEE 4th International Conference on Indoor Positioning and Indoor Navigation, Belfort-Montbeliard, France, 28–31 October 2013; pp. 1–7.
- Dawes, B.; Chin, K.-W. A Comparison of Deterministic and Probabilistic Methods for Indoor Localization. J. Syst. Softw. 2011, 84, 442–451. [Google Scholar] [CrossRef]
- Bolliger, P. Robust Indoor Positioning through Adaptive Collaborative Labeling of Location Fingerprints. Ph.D. Thesis, ETH Zurich, Zurich, Switzerland, February 2011. [Google Scholar]
- Kjærgaard, M.B. Indoor Location Fingerprinting with Heterogeneous Clients. Pervasive Mob. Comput. 2011, 7, 31–43. [Google Scholar] [CrossRef]
- Narzullaev, A.; Park, Y.; Yoo, K.; Yu, J. A Fast and Accurate Calibration Algorithm for Real-Time Locating Systems Based on the Received Signal Strength Indication. AEU Int. J. Electron. Commun. 2011, 65, 305–311. [Google Scholar] [CrossRef]
- Milioris, D.; Tzagkarakis, G.; Papakonstantinou, A.; Papadopouli, M.; Tsakalides, P. Low-Dimensional Signal-Strength Fingerprint-Based Positioning in Wireless LANs. Ad Hoc Netw. 2014, 12, 100–114. [Google Scholar] [CrossRef]
- Narzullaev, A.; Park, Y. Novel Calibration Algorithm for Received Signal Strength Based Indoor Real-Time Locating Systems. AEU Int. J. Electron. Commun. 2013, 67, 637–644. [Google Scholar] [CrossRef]
- Gutierrez, N.; Belmonte, C.; Hanvey, J.; Espejo, R.; Dong, Z. Indoor Localization for Mobile Devices. In Proceedings of the 11th IEEE International Conference on Networking, Sensing and Control, Miami, FL, USA, 7–9 April 2014; pp. 173–178.
- Husen, M.N.; Lee, S. Indoor Human Localization with Orientation Using Wi-Fi Fingerprinting. In Proceedings of the ACM 8th International Conference on Ubiquitous Information Management and Communication, Siem Reap, Cambodia, 9–11 January 2014.
- Martin, E.; Vinyals, O.; Friedland, G.; Bujcsy, R. Precise Indoor Localization using Smart Phones. In Proceedings of the ACM Multimedia, Firenze, Italy, 25–29 October 2010; pp. 787–790.
- Shin, B.-J.; Lee, K.-W.; Choi, S.-H.; Kim, J.-Y.; Lee, W.J.; Kim, H.S. Indoor Wifi Positioning System for Android-Based Smartphone. In Proceedings of the International Conference on Information and Communication Technology Convergence, Jeju Island, Korea, 17–19 November 2010.
- Chen, Q. A Rule-Based Approach to Indoor Localization Based on Wifi Signal Strengths. Ph.D. Thesis, Hong Kong University of Science and Technology, Hong Kong, China, August 2012. [Google Scholar]
- Luo, Y.; Hoeber, O.; Chen, Y. Enhancing Wi-Fi Fingerprinting for Indoor Positioning Using Human-Centric Collaborative Feedback. Hum. Centric Comput. Inf. Sci. 2013, 3. [Google Scholar] [CrossRef]
- So, J.; Lee, J.-Y.; Yoon, C.-H.; Park, H. An Improved Location Estimation Method for Wifi Fingerprint-Based Indoor Localization. Int. J. Softw. Eng. Appl. 2013, 7, 77–86. [Google Scholar]
- Chan, E.C.L.; Baciu, G.; Mak, S.C. Orientation-based Wi-Fi Positioning on the Google Nexus One. In Proceedings of the 6th IEEE International Conference on Wireless and Mobile Computing, Networking and Communications, Niagara Falls, ON, Canada, 11–13 October 2010; pp. 392–397.
- Husen, M.N.; Lee, S. Indoor Location Wi-Fi Fingerprinting Using Invariant Received Signal Strength. In Proceedings of the International Conference on Engineering Technology and Entrepreneurship, Kuala Lumpur, Malaysia, 16–18 November 2015.
- Sánchez-Rodríguez, D.; Hernández-Morera, P.; Quinteiro, J.M.; Alonso-González, I. A Low Complexity System Based on Multiple Weighted Decision Trees for Indoor Localization. Sensors 2015, 15, 14809–14829. [Google Scholar] [CrossRef] [PubMed]
- Husen, M.N.; Lee, S. High Performance Indoor Location Wi-Fi Fingerprinting Using Invariant Received Signal Strength. In Proceedings of the ACM 10th International Conference on Ubiquitous Information Management and Communication, Danang, Vietnam, 4–6 January 2016.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. of Wi-Fi Signal Sources | No. of Calibration Locations |
|---|---|
| 20 | 7 |
| 50 | |
| 80 | |
| 20 | 15 |
| 50 | |
| 80 | |
| 20 | 20 |
| 50 | |
| 80 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Husen, M.N.; Lee, S. Indoor Location Sensing with Invariant Wi-Fi Received Signal Strength Fingerprinting. Sensors 2016, 16, 1898. https://doi.org/10.3390/s16111898
Husen MN, Lee S. Indoor Location Sensing with Invariant Wi-Fi Received Signal Strength Fingerprinting. Sensors. 2016; 16(11):1898. https://doi.org/10.3390/s16111898
Chicago/Turabian StyleHusen, Mohd Nizam, and Sukhan Lee. 2016. "Indoor Location Sensing with Invariant Wi-Fi Received Signal Strength Fingerprinting" Sensors 16, no. 11: 1898. https://doi.org/10.3390/s16111898
APA StyleHusen, M. N., & Lee, S. (2016). Indoor Location Sensing with Invariant Wi-Fi Received Signal Strength Fingerprinting. Sensors, 16(11), 1898. https://doi.org/10.3390/s16111898