
Vision-Aided RAIM: A New Method for GPS Integrity Monitoring in Approach and Landing Phase

Abstract
:1. Introduction
2. The Proposed VA-RAIM
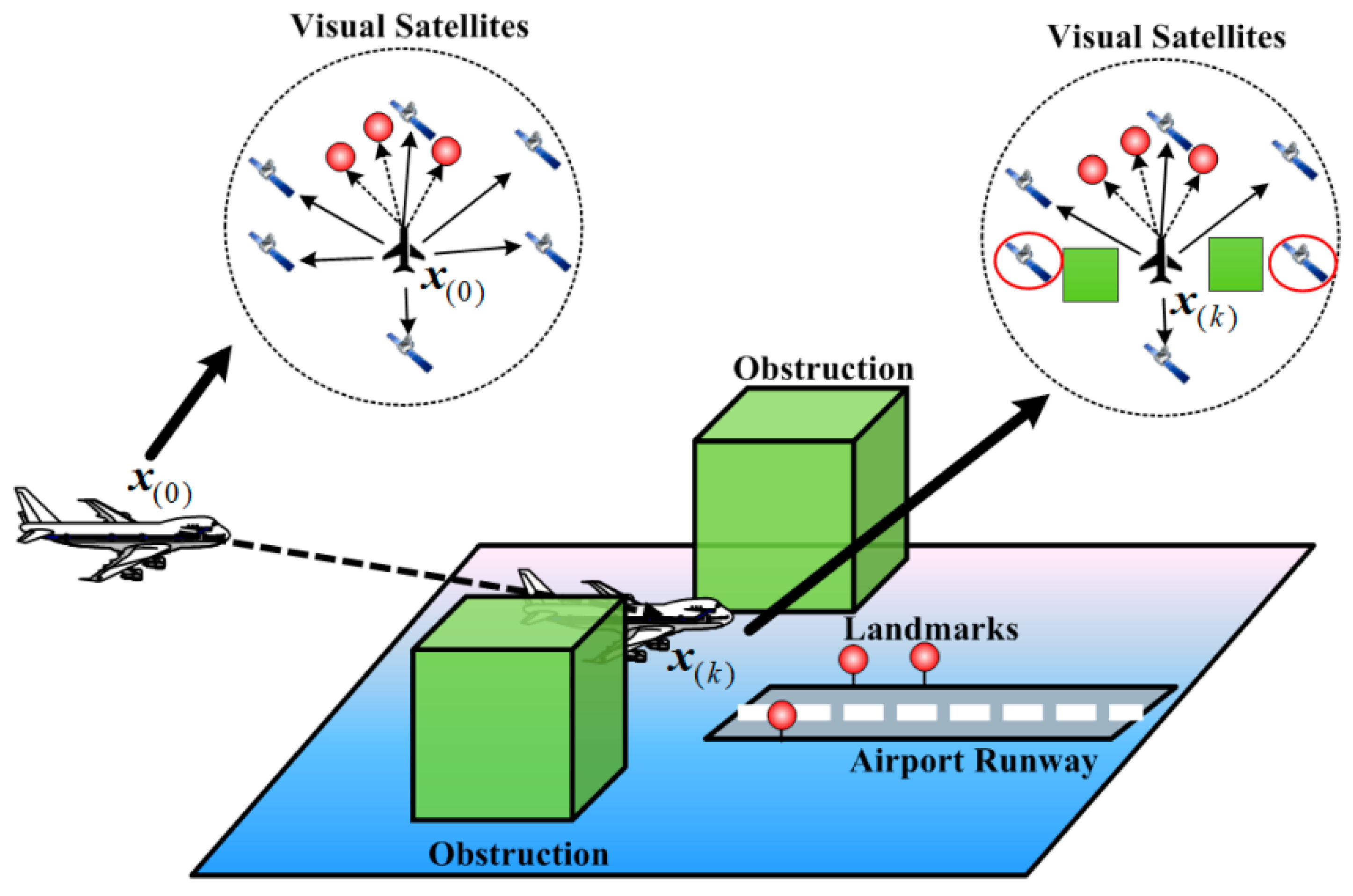
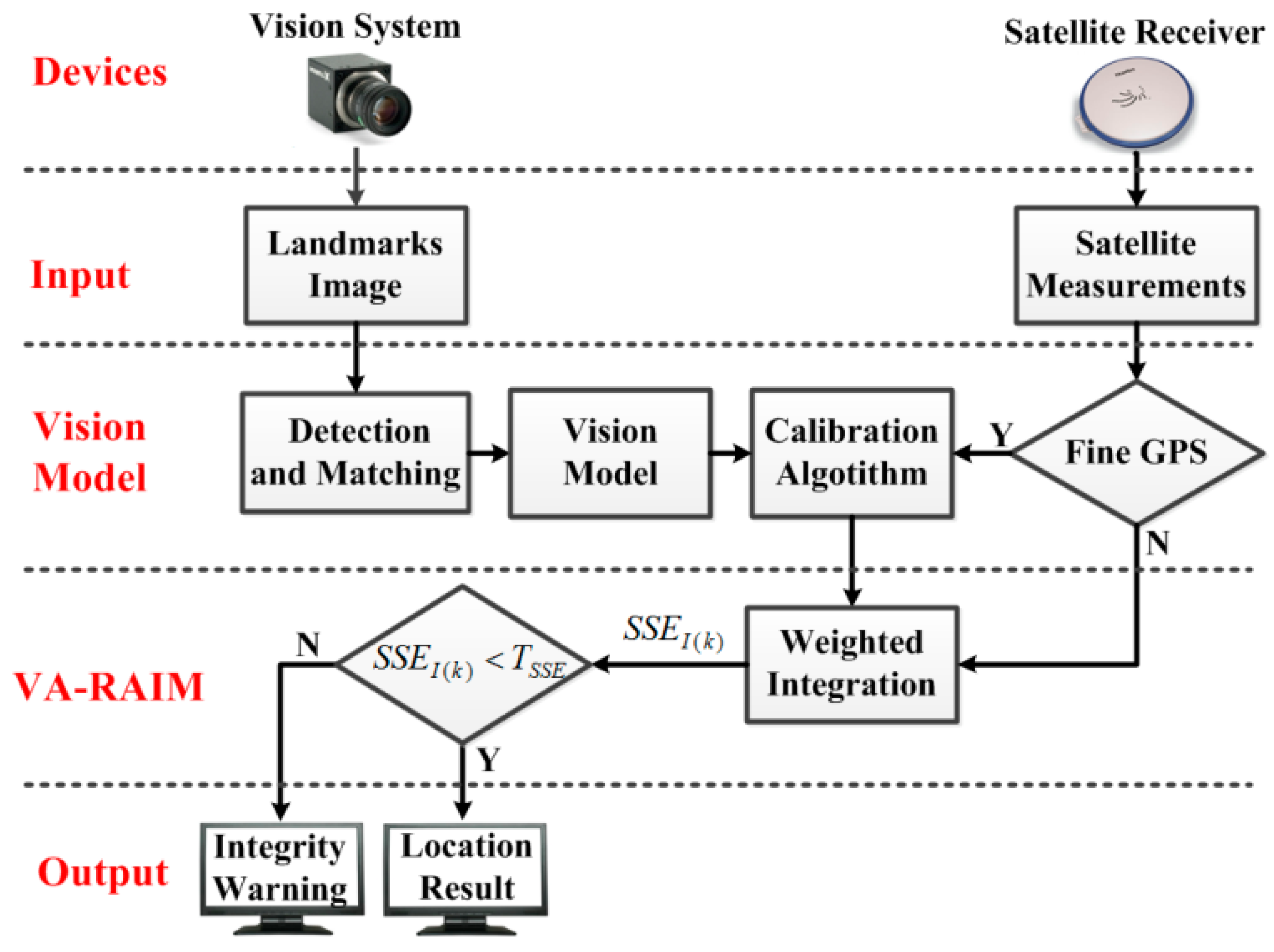
2.1. Overview of VA-RAIM
2.2. Vision Model with Calibration
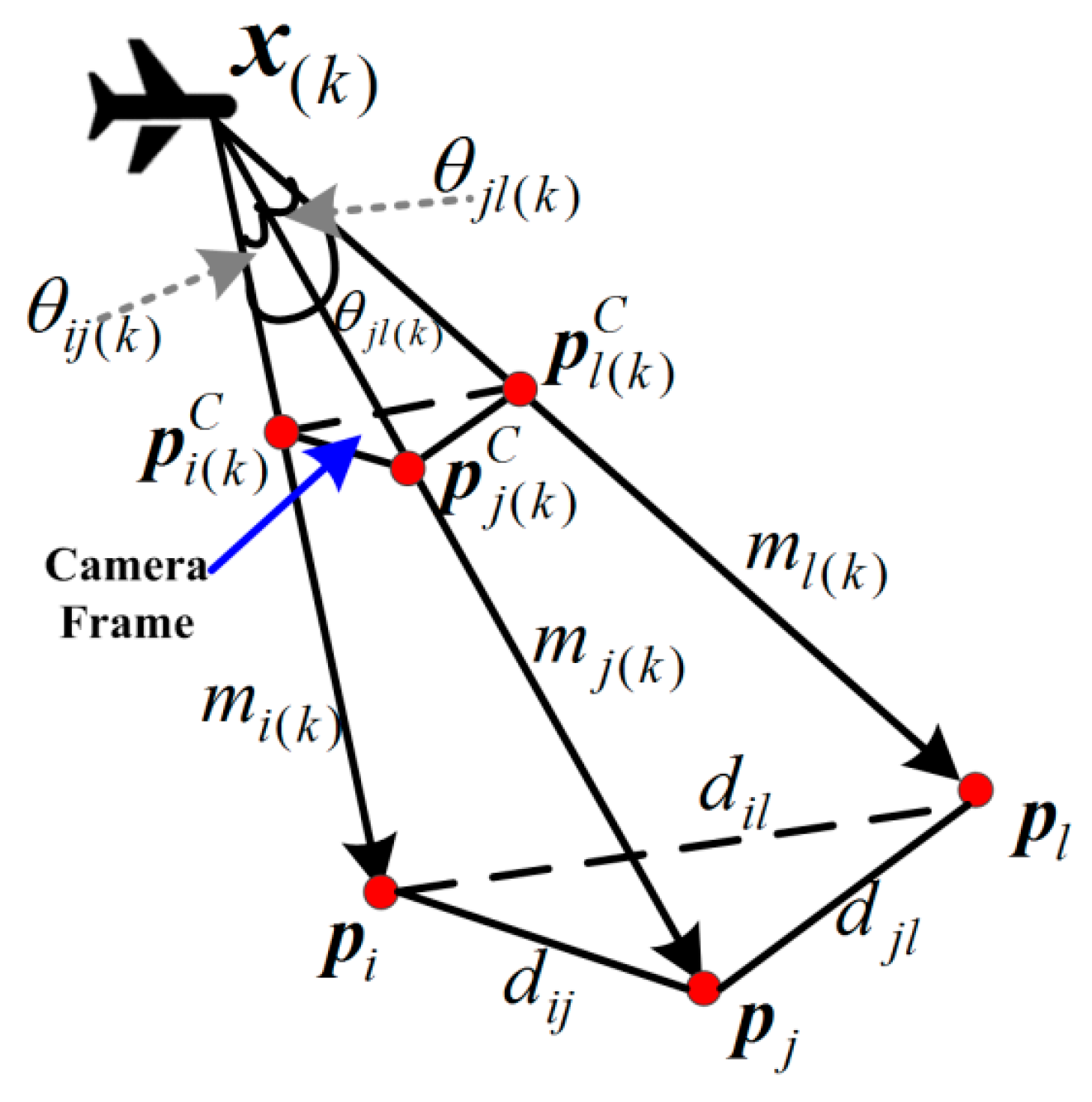
2.2.1. Vision Model
2.2.2. Calibration Method
2.3. VA-RAIM
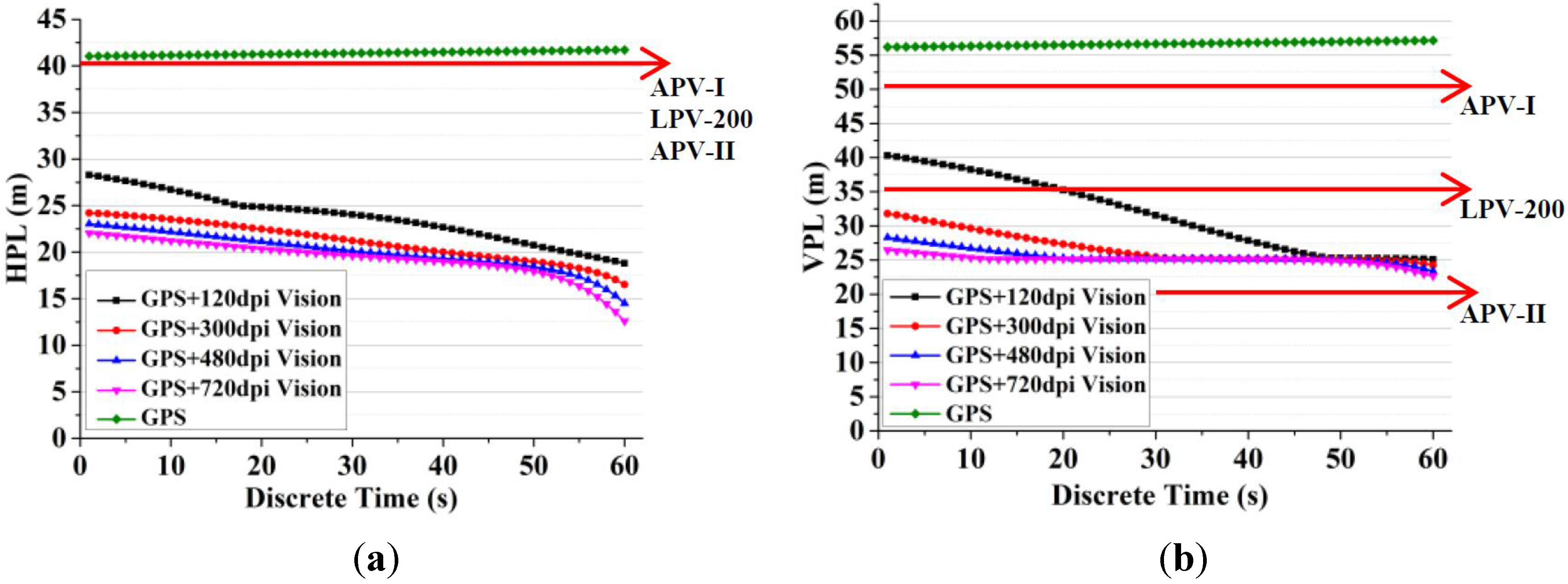
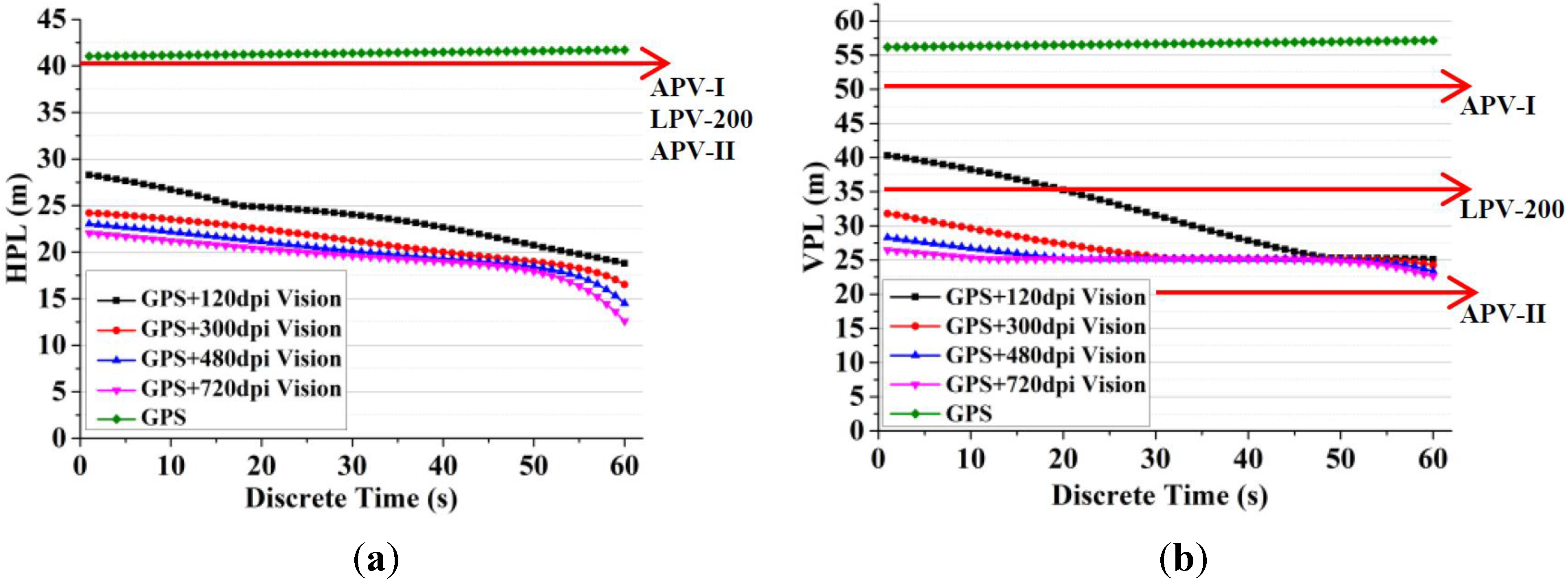
2.3.1. Protection Level and Availability
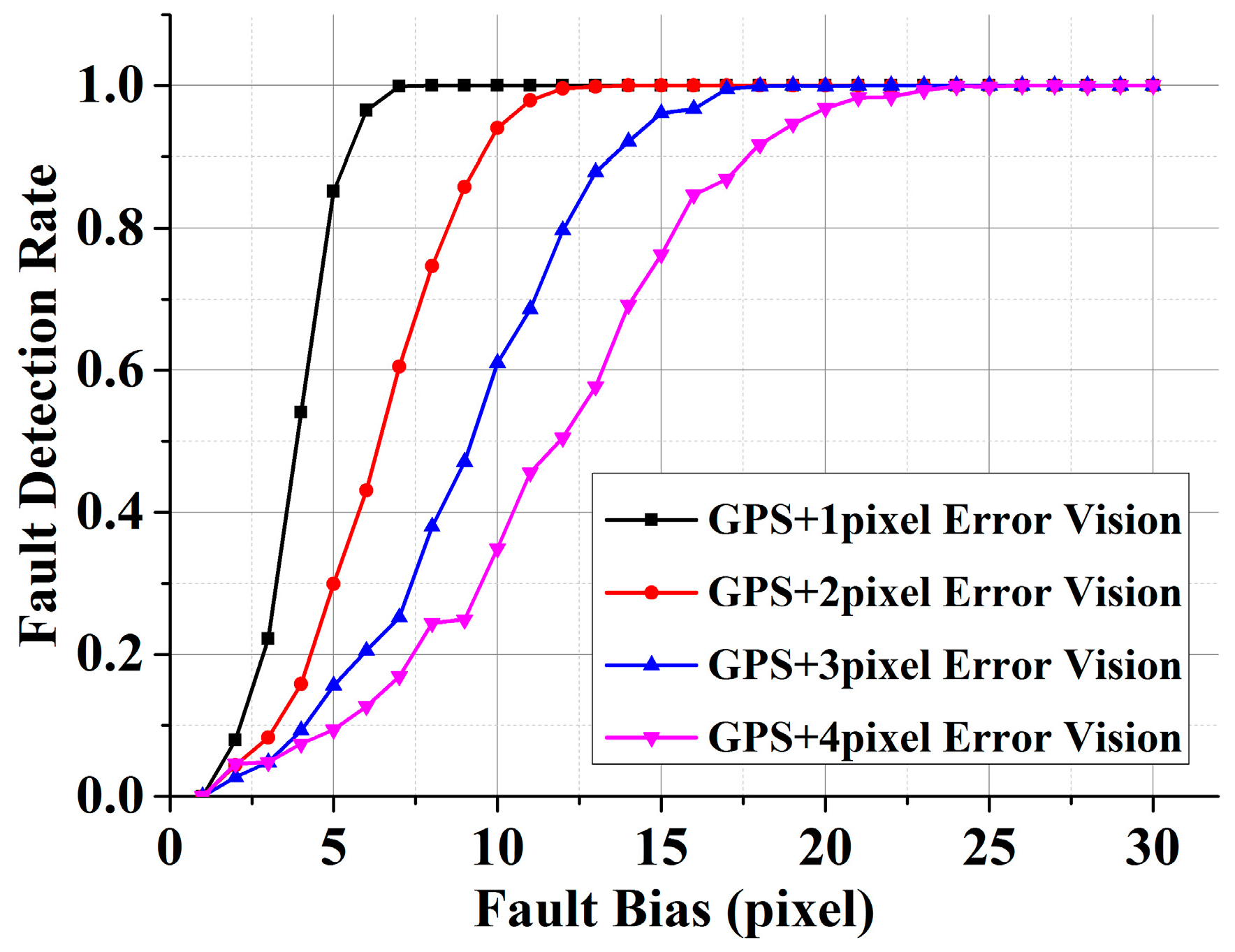
2.3.2. Fault Detection
3. Numerical Experiments and Discussions
3.1. Simulation Data
3.1.1. GPS System
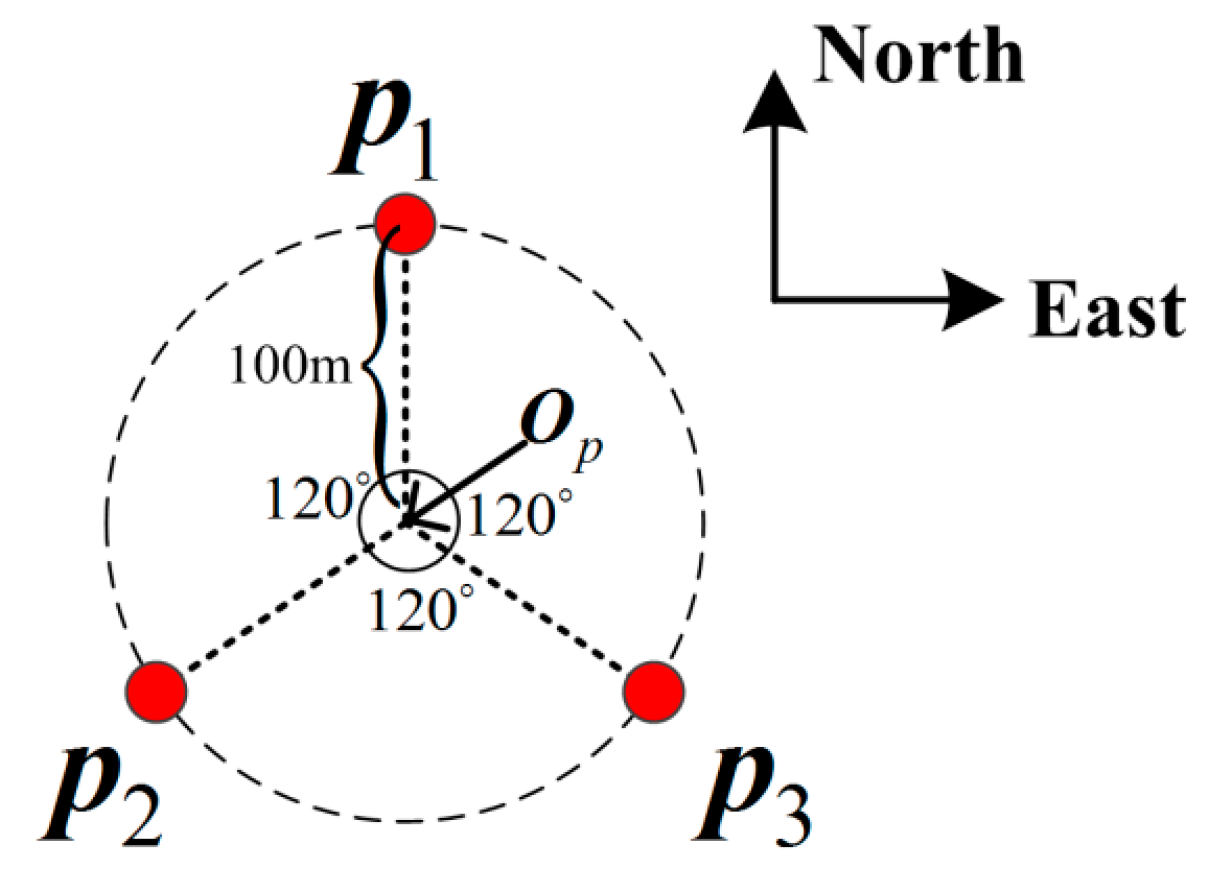
3.1.2. Vision System
3.1.3. Approach and Landing Operations
3.2. Vision Pseudorange with Calibration
3.3. Performance Index

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance Requirement | APV-I | LPV-200 | APV-II |
|---|---|---|---|
| HAL | 40 m | 40 m | 40 m |
| VAL | 50 m | 35 m | 20 m |
| HA (95%) | 16 m | 16 m | 16 m |
| VA (95%) | 20 m | 4 m | 8 m |
| TTA | 10 s | 6.2 s | 6 s |
3.3.1. Availability
3.3.2. Position Accuracy
3.3.3. Time Cost
3.4. Fault Detection
3.4.1. GPS Fault
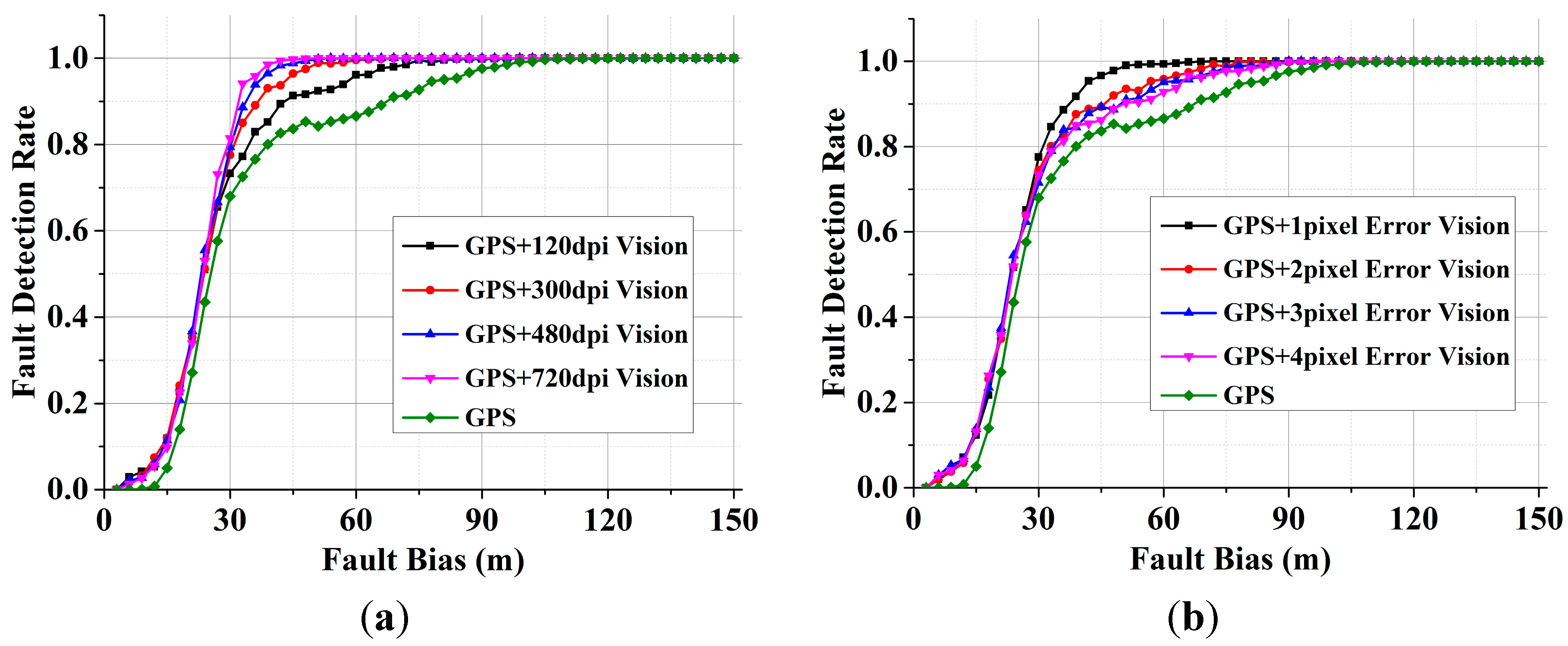
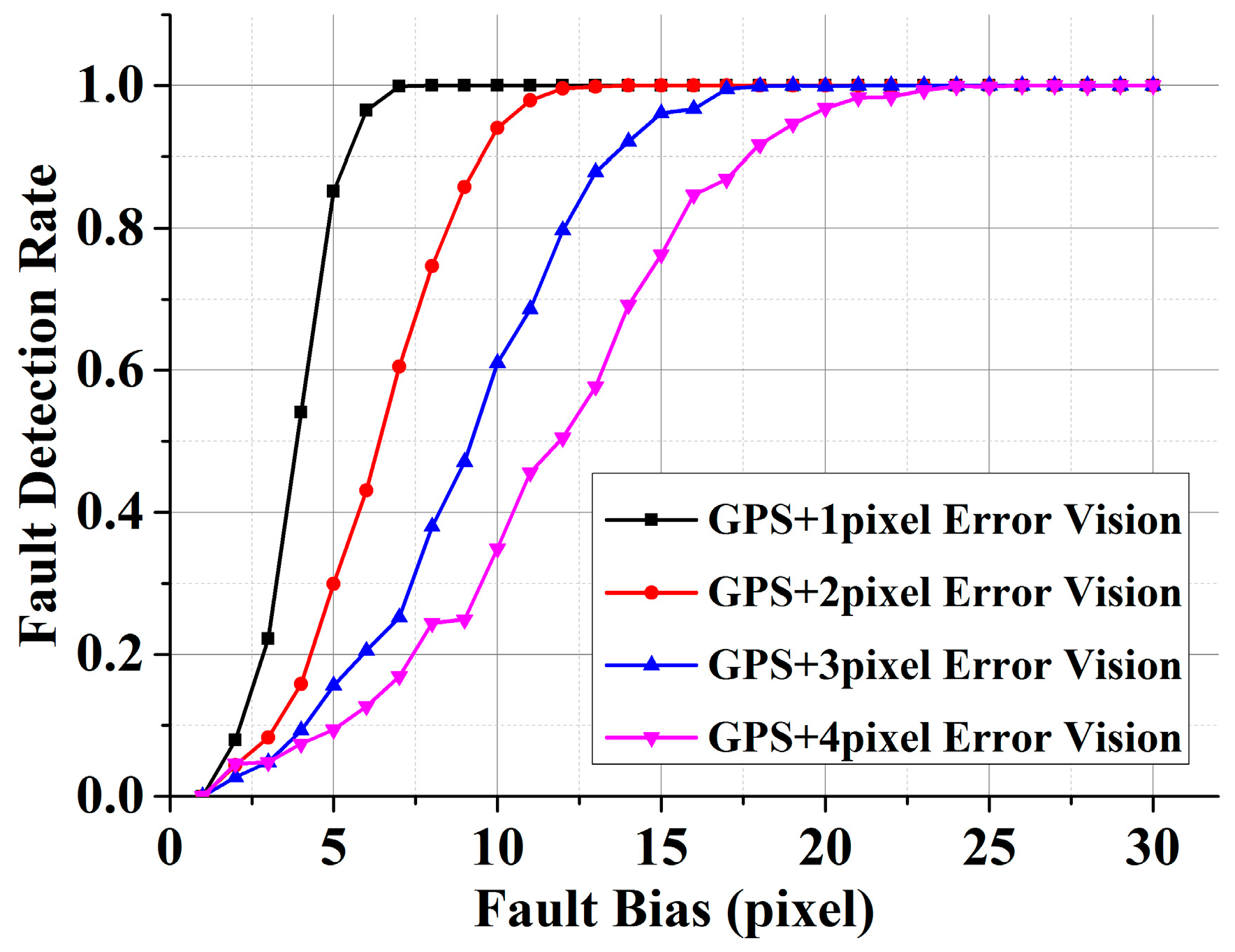
3.4.2. Vision Fault
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix
References
- Feng, S.; Ochieng, W.; Walsh, D.; Ioannides, R. A measurement domain receiver autonomous integrity monitoring algorithm. GPS Solut. 2006, 10, 85–96. [Google Scholar] [CrossRef]
- Hewitson, S.; Wang, J. GNSS receiver autonomous integrity monitoring (RAIM) performance analysis. GPS Solut. 2006, 10, 155–170. [Google Scholar] [CrossRef]
- Schuster, W.; Bai, J.; Feng, S.; Ochieng, W. Integrity monitoring algorithms for airport surface movement. GPS Solut. 2012, 16, 65–75. [Google Scholar] [CrossRef]
- Abidat, A.; Li, C.; Tan, Z. The study of RAIM performance by simulation. Comput.-Aided Draft. Des. Manuf. 2006, 16, 58–64. [Google Scholar]
- Wang, Z.; Macabiau, C.; Zhang, J.; Escher, A. Prediction and analysis of GBAS integrity monitoring availability at LinZhi airport. GPS Solut. 2014, 18, 27–40. [Google Scholar] [CrossRef]
- Webb, T.; Groves, P.; Cross, P.; Mason, R.; Harrison, J. A new differential positioning method using modulation correlation of signals of opportunity. In Proceedings of the IEEE/ION Position Location and Navigation Symposium (PLANS), Indian Wells, CA, USA, 4–6 May 2010; pp. 972–981.
- Jan, S.; Gebre-Egziabher, D.; Walter, T.; Enge, P. Improving GPS-based landing system performance using an empirical barometric altimeter confidence bound. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 127–146. [Google Scholar]
- Bhatti, U.; Ochieng, W.; Feng, S. Integrity of an integrated GPS/INS system in the presence of slowly growing errors. Part I: A critical review. GPS Solut. 2007, 11, 173–181. [Google Scholar] [CrossRef]
- Schroth, G.; Enge, A.; Blanch, J.; Walter, T.; Enge, P. Failure detection and exclusion via range consensus. In Proceedings of the European Navigation Conference GNSS Conference, Toulouse, France, 22–25 April 2008.
- Shi, Y.; Teng, Y. The clock-aided RAIM method and its application in improving the positioning precision of GPS receiver. Acta Astronaut. 2012, 77, 126–130. [Google Scholar] [CrossRef]
- Velaga, N.; Quddus, M.; Bristow, A.; Zheng, Y. Map-aided integrity monitoring of a land. IEEE Trans. Intell. Transp. Syst. 2012, 13, 848–858. [Google Scholar] [CrossRef]
- Larson, C. An Integrity Framework for Image-Based Navigation Systems. Ph.D. Thesis, Air Force Institute of Technology, Dayton, OH, USA, 2010. [Google Scholar]
- Dusha, D.; Mejias, L. Error analysis and attitude observability of a monocular GPS/visual odometry integrated navigation filter. Int. J. Robot. Res. 2012, 31, 714–737. [Google Scholar] [CrossRef]
- Won, D.; Lee, E.; Heo, M.; Sung, S.; Lee, J.; Lee, Y. GNSS integration with vision-based navigation for low GNSS visibility conditions. GPS Solut. 2014, 18, 177–187. [Google Scholar] [CrossRef]
- Vezinet, J.; Escher, A.C.; Guillet, A.; Macabiau, C. State of the art of image-aided navigation techniques for aircraft approach and landing. In Proceedings of the International Technical Meeting (ITM) of The Institute of Navigation, San Diego, CA, USA, 27–29 January 2013.
- Milner, C.; Ochieng, W. Weighted RAIM for APV: The ideal protection level. J. Navig. 2011, 64, 61–73. [Google Scholar] [CrossRef]
- Bruckner, D.; Graas, F.; Skidmore, T. Statistical characterization of composite protection levels for GPS. GPS Solut. 2011, 15, 263–273. [Google Scholar] [CrossRef]
- Groves, P. Principles of GNSS, Inertial and Multi-Sensor Integrated Navigation Systems, 2nd ed.; Artech House Publishers: Norwood, MA, USA, 2013. [Google Scholar]
- Ma, Y.; Soatto, S.; Kosecka, J.; Sastry, S. An Invitation to 3D Vision: From Images to Geometric Models; Springer: Berlin, Germany, 2004. [Google Scholar]
- Grewal, M.; Weill, L.; Andrews, A. Global Positioning System, Inertial Navigation, and Integration, 2nd ed.; John Wiley & Sons, Inc.: New York, NY, USA, 2007. [Google Scholar]
- Walter, T.; Enge, P. Weighted RAIM for precision approach. In Proceedings of the ION GPS, Palm Springs, CA, USA, 12–15 September 1995.
- Lee, Y.C. Analysis of Range and Position Comparison Methods as a Means to Provide GPS Integrity in the User Receiver. In Proceedings of the Global Positioning System, the Institute of Navigation, Seattle, WA, USA, 24–26 June 1986.
- Parkinson, B.W.; Axelrad, P. Autonomous GPS Integrity Monitoring Using the Pseudorange Residual. Navigation 1988, 35, 255–274. [Google Scholar] [CrossRef]
- Hewitson, S.; Wang, J. GNSS Receiver Autonomous Integrity Monitoring with a Dynamic Model. J. Navig. 2007, 60, 247–263. [Google Scholar] [CrossRef]
- Panagiotakopoulos, D.; Majumdar, A.; Ochieng, W. Extreme value theory-based integrity monitoring of global navigation satellite systems. GPS Solut. 2014, 18, 133–145. [Google Scholar] [CrossRef]
- Bhatti, U. Improved Integrity Algorithms for the Integrated GPS/INS Systems in the Presence of slowly Growing Errors. Ph.D. Thesis, Imperial College London, London, UK, 2008. [Google Scholar]
- Sturza, M. Navigation system integrity monitoring using redundant measurements. J. Inst. Navig. 1988, 35, 483–501. [Google Scholar] [CrossRef]
- Blanch, J.; Walter, T.; Enge, P.; Lee, Y.; Pervan, B.; Rippl, M.; Spletter, A. Advanced RAIM user Algorithm Description: Integrity Support Message Processing, Fault Detection, Exclusion, and Protection Level Calculation. In Proceedings of the 25th International Technical Meeting of the Satellite Division of the Institute of Navigation, Nashville, TN, USA, 17–21 November 2012.
- Minimum Operational Performance Standards for Airborne Supplemental Navigation Equipment Using Global Positioning System; RTCA/DO-208, RTCA Special Committee 159: Washington, DC, USA, 1991.
- Vezinet, J.; Escher, A.C.; Guillet, A.; Macabiau, C. Video integration in a GPS/INS hybridization architecture for approach and landing. In Proceedings of the 2014 IEEE/ION PLANS Technical Program, Monterey, CA, USA, 5–8 May 2014.
- Gruen, A. Development and Status of Image Matching in Photogrammetry. Photogramm. Rec. 2012, 27, 36–57. [Google Scholar] [CrossRef]
- ICAO Standards and Recommended Practices. Annex 10. In Radio Navigation Aids; ICAO: Montréal, QC, Canada, 2006. [Google Scholar]
- Global Positioning System Wide Area Augmentation System (WAAS) Performance Standard, 1st ed.Department of Transportation and Federal Aviation Administration (FAA): Washington, DC, USA, 2008.
- Zhang, M.; Li, Z.; Zhang, C.; Bai, H. Adaptive feature extraction and image matching based on haar wavelet transform and SIFT. Int. J. Digit. Content Technol. Appl. 2012, 6, 1–8. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, L.; Zhang, J.; Li, R.; Cao, X.; Wang, J. Vision-Aided RAIM: A New Method for GPS Integrity Monitoring in Approach and Landing Phase. Sensors 2015, 15, 22854-22873. https://doi.org/10.3390/s150922854
Fu L, Zhang J, Li R, Cao X, Wang J. Vision-Aided RAIM: A New Method for GPS Integrity Monitoring in Approach and Landing Phase. Sensors. 2015; 15(9):22854-22873. https://doi.org/10.3390/s150922854
Chicago/Turabian StyleFu, Li, Jun Zhang, Rui Li, Xianbin Cao, and Jinling Wang. 2015. "Vision-Aided RAIM: A New Method for GPS Integrity Monitoring in Approach and Landing Phase" Sensors 15, no. 9: 22854-22873. https://doi.org/10.3390/s150922854
APA StyleFu, L., Zhang, J., Li, R., Cao, X., & Wang, J. (2015). Vision-Aided RAIM: A New Method for GPS Integrity Monitoring in Approach and Landing Phase. Sensors, 15(9), 22854-22873. https://doi.org/10.3390/s150922854