
Transferring Data from Smartwatch to Smartphone through Mechanical Wave Propagation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- Use of mechanical waves through the human body parts for inter-device communication.
- (2)
- Measurement and analysis of body-transmitted high-frequency signals.
2. Related Work
2.1. On-Body Communication
2.1.1. Simple Circuit Type
2.1.2. Electrostatic Coupling Type
2.1.3. Waveguide Type: Radio Waves
2.2. Mechanical Signal Transfer through Human Body Parts
2.3. Communication between Devices with Mechanical Signals
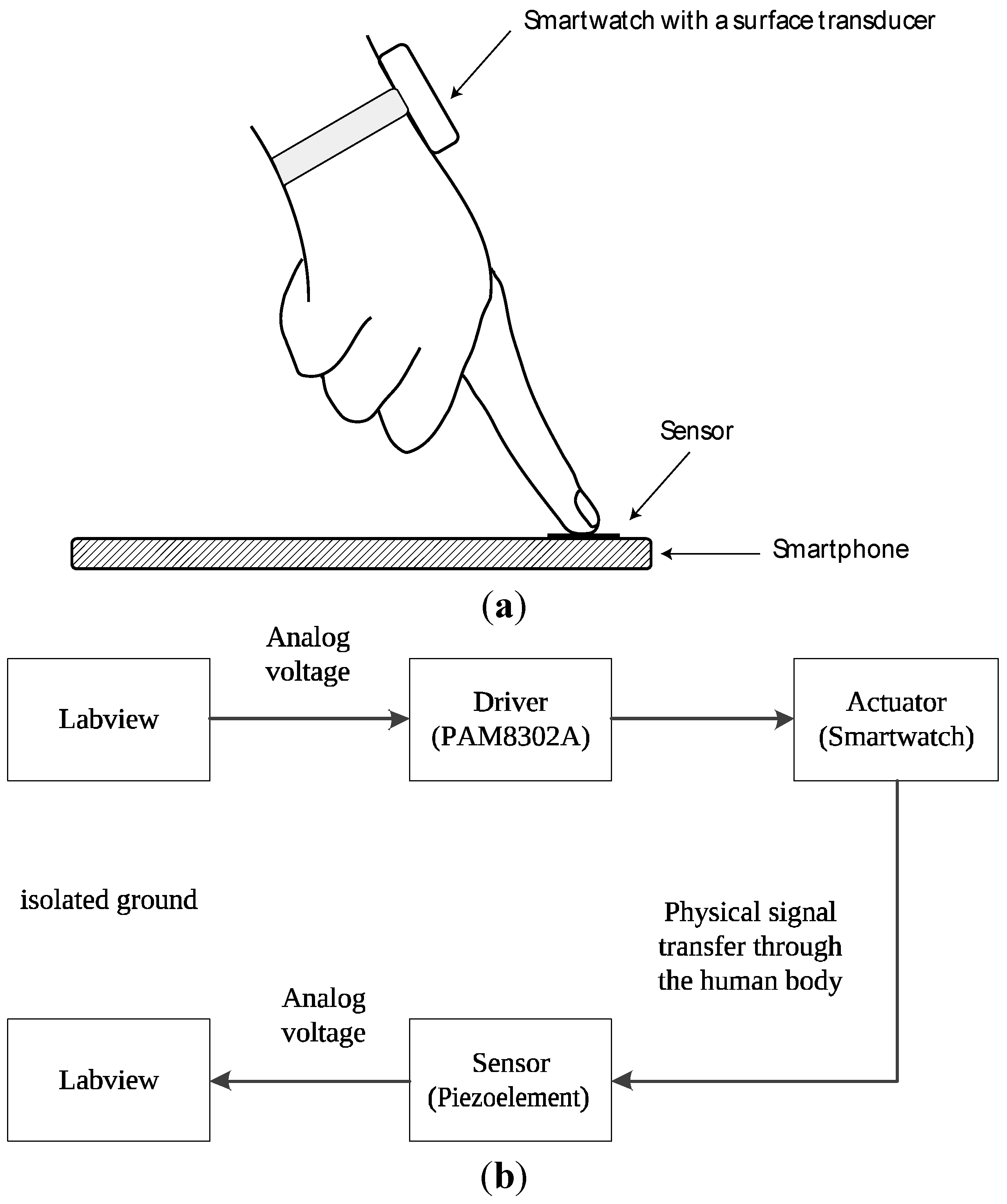
3. Proposed System

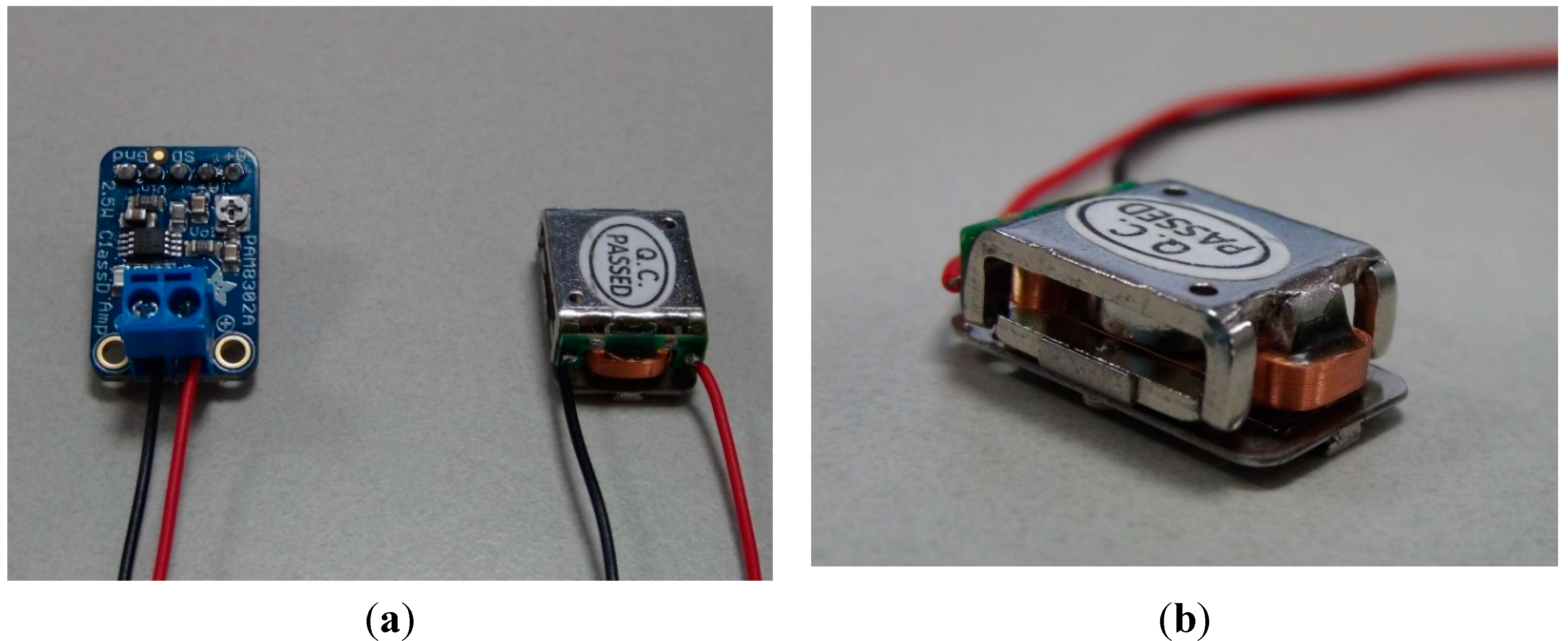
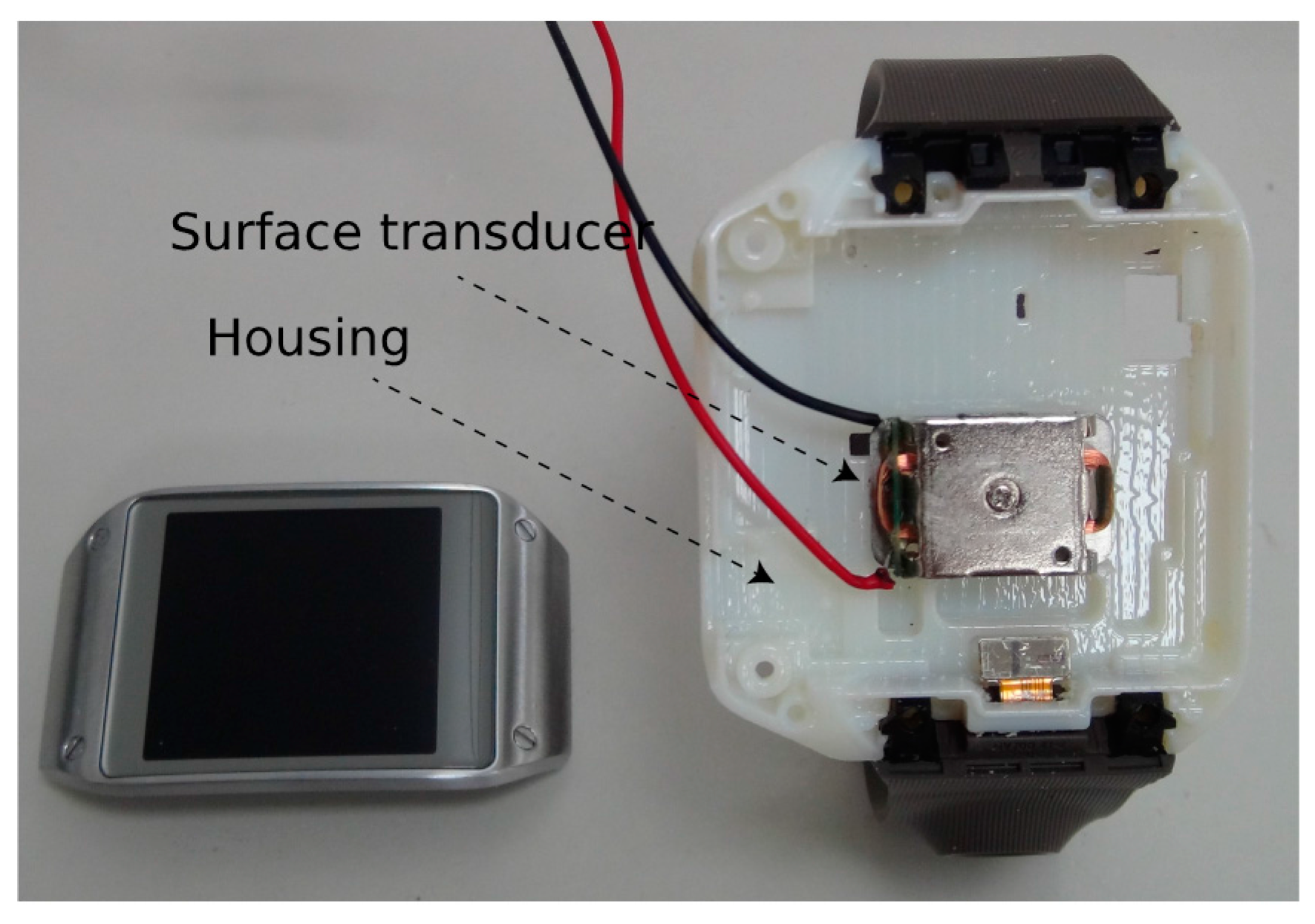
3.1. Hardware
3.2. Data Acquisition and Analysis
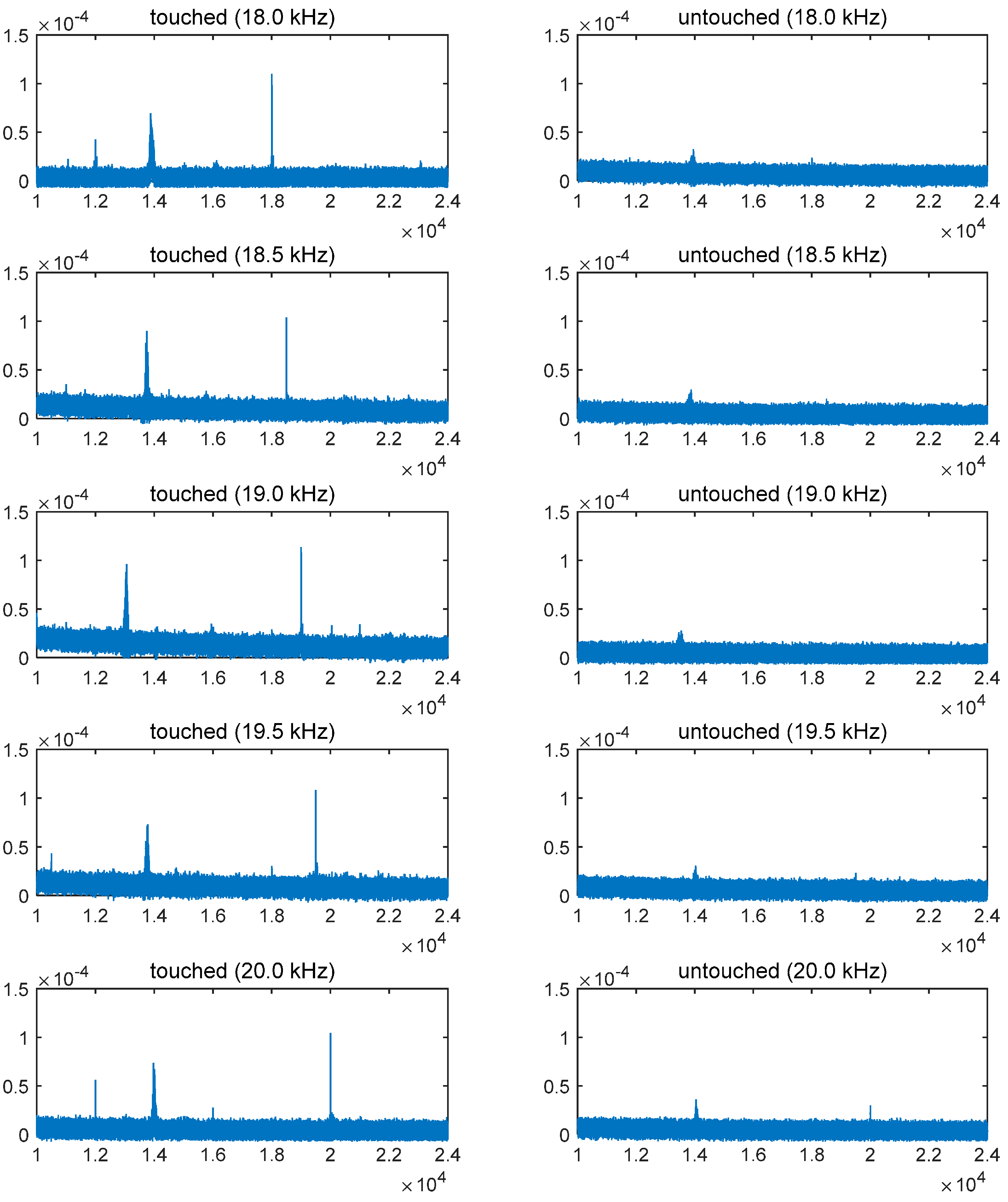
3.3. Results and Discussion
4. Applications
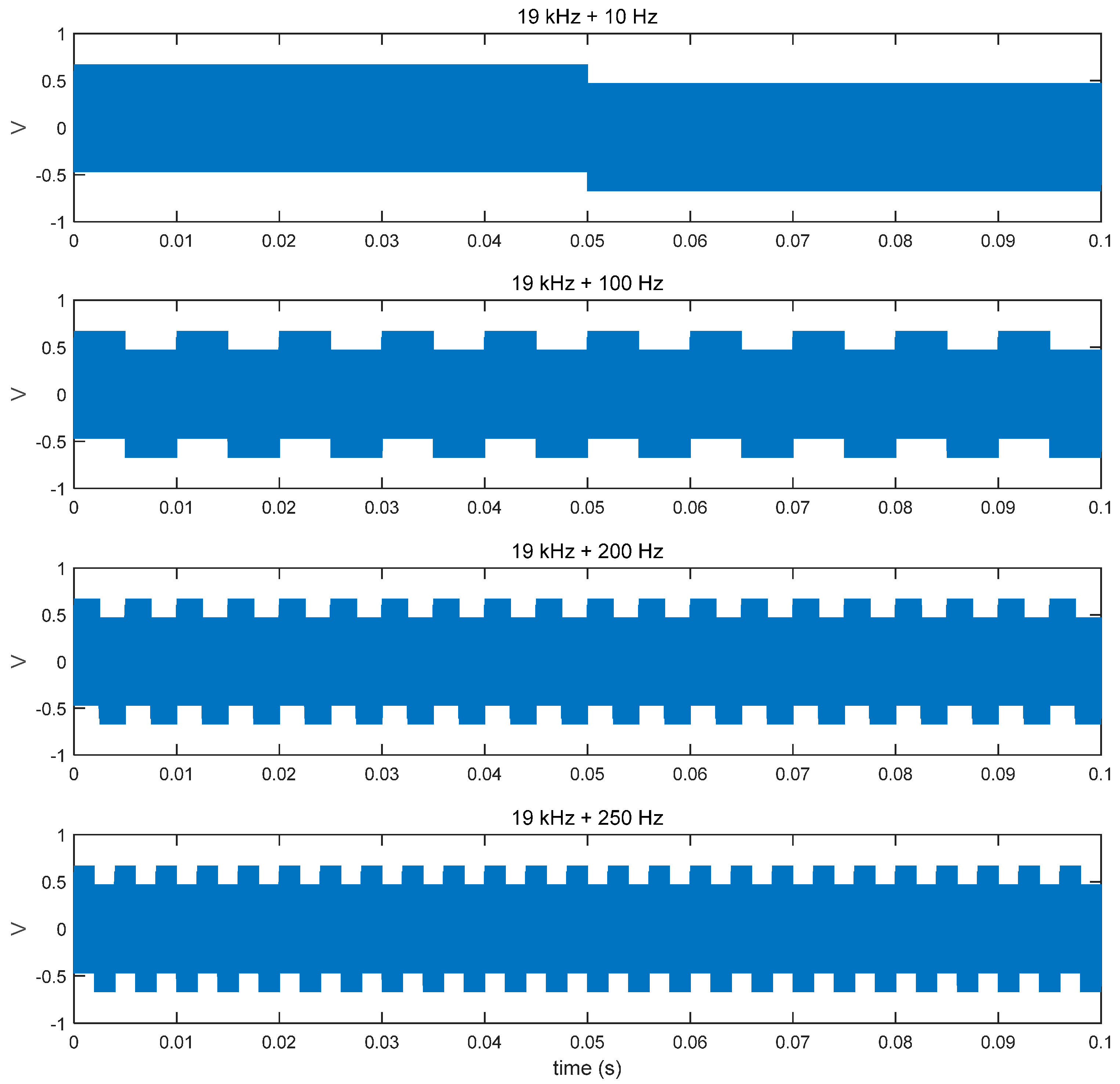
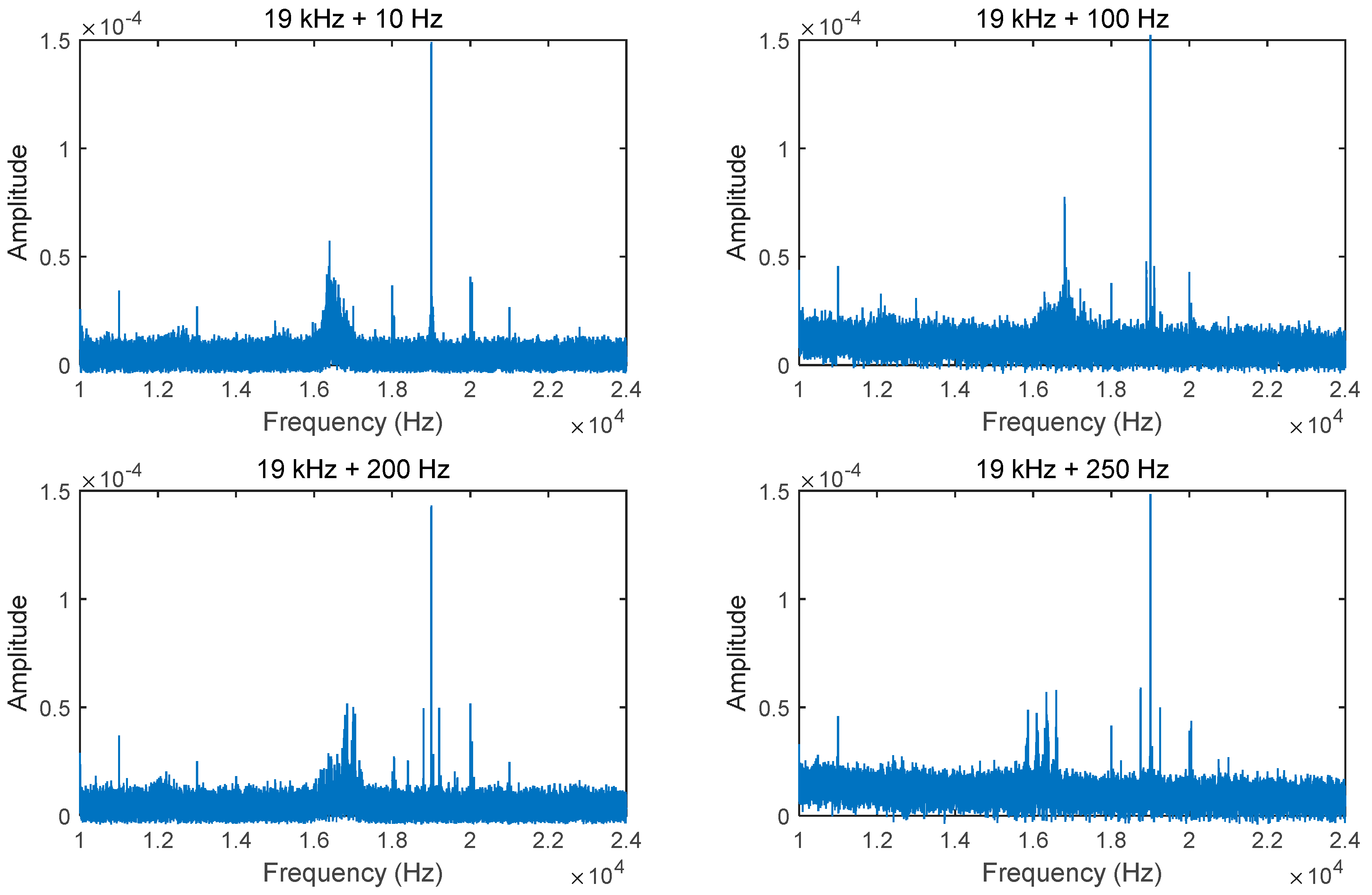
4.1. Dual Frequency Actuation
4.2. Encrypted Mechanical Signals
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zimmerman, T.G. Personal Area Networks: Near-field intrabody communication. IBM Syst. J. 1996, 35, 609–617. [Google Scholar] [CrossRef]
- Mulliner, C. Vulnerability Analysis and Attacks on NFC-Enabled Mobile Phones. In Proceedings of the 2009 International Conference on Availability, Reliability and Security, Fukuoka, Japan, 16–19 March 2009.
- Ahlbom, A.; Bergqvist, U.; Bernhardt, J.H.; Cesarini, J.; Court, L.A.; Grandolfo, M.; Hietanen, M.; Mckinlay, A.F.; Repacholi, M.H.; Sliney, D.H.; et al. Guidelines for limiting exposure to time-varying electric, magnetic, and electromagnetic fields (up to 300 GHz). Health Phys. 1998, 74, 494–522. [Google Scholar]
- Wegmüller, M.S. Intra-Body Communication for Biomedical Sensor Networks. Ph.D. Thesis, ETH Zürich, Switzerland, 2007. [Google Scholar]
- Webster, J.G. Medical Instrumentation-Application and Design. J. Clin. Eng. 1978, 3, 306. [Google Scholar] [CrossRef]
- Hachisuka, K.; Nakata, A.; Takeda, T.; Terauchi, Y.; Shiba, K.; Sasaki, K.; Hosaka, H.; Itao, K. Development and performance analysis of an intra-body communication device. In Proceedings of the 12th International Conference on TRANSDUCERS, Solid-State Sensors, Actuators and Microsystems, Boston, MA, USA, 8–12 June 2003.
- Zimmerman, T.G.; Smith, J.R.; Paradiso, J.A.; Allport, D.; Gershenfeld, N. Applying electric field sensing to human-computer interfaces. In Proceedings of the 1995 SIGCHI Conference on Human Factors in Computing Systems, Denver, CO, USA, 7–11 May 1995; ACM Press/Addison-Wesley Publishing Co.: New York, NY, USA; pp. 280–287.
- Cohn, G.; Morris, D.; Patel, S.N.; Tan, D.S. Your noise is my command: Sensing gestures using the body as an antenna. In Proceedings of the 2011 SIGCHI Conference on Human Factors in Computing Systems, Vancouver, BC, Canada, 7–12 May 2011; ACM: New York, NY, USA; pp. 791–800.
- Bullock, H.T.; Hopkins, C.D.; Fay, R.R. Electroreception; Springer Science & Business Media: New York, NY, USA, 2006; Volume 21. [Google Scholar]
- Dietz, P.; Leigh, D. DiamondTouch: A multi-user touch technology. In Proceedings of the 14th Annual ACM Symposium on User Interface Software and Technology, Orlando, FL, USA, 11–14 November 2001; ACM: New York, NY, USA; pp. 219–226.
- Takemura, K.; Ito, A.; Takamatsu, J.; Ogasawara, T. Active bone-conducted sound sensing for wearable interfaces. In Proceedings of the 24th annual ACM Symposium Adjunct on User Interface Software and Technolog, Santa Barbara, CA, USA, 16–19 October 2011; ACM: New York, NY, USA; pp. 53–54.
- Mujibiya, A.; Cao, X.; Tan, D.S.; Morris, D.; Patel, S.N.; Rekimoto, J. The sound of touch: on-body touch and gesture sensing based on transdermal ultrasound propagation. In Proceedings of the 2013 ACM International Conference on Interactive Tabletops and Surfaces, St. Andrews, UK, 6–9 October 2013; ACM: New York, NY, USA; pp. 189–198.
- Harrison, C.; Tan, D.; Morris, D. Skinput: Appropriating the body as an input surface. In Proceedings of the 2010 SIGCHI Conference on Human Factors in Computing Systems, Atlanta, GA, USA, 10–15 April 2010; ACM: New York, NY, USA; pp. 453–462.
- Santagati, E.G.; Melodia, T. Sonar inside your body: Prototyping ultrasonic intra-body sensor networks. In Proceedings of the 2014 IEEE INFOCOM, Toronto, ON, Canada, 12 April–2 May 2014.
- Van der Perre, G.; Lowet, G. In vivo assessment of bone mechanical properties by vibration and ultrasonic wave propagation analysis. Bone 1996, 18, S29–S35. [Google Scholar] [CrossRef]
- Santagati, G.E.; Melodia, T.; Galluccio, L.; Palazzo, S. Ultrasonic networking for e-health applications. IEEE Wirel. Commun. 2013, 20, 74–81. [Google Scholar] [CrossRef]
- Santagati, G.E.; Melodia, T. U-Wear: Software-Defined Ultrasonic Networking for Wearable Devices. In Proceedings of the 13th Annual International Conference on Mobile Systems, Applications, and Services, Florence, Italy, 18–25 May 2015; ACM: New York, NY, USA; pp. 241–256.
- Harrison, C.; Hudson, S.E. Scratch input: Creating large, inexpensive, unpowered and mobile finger input surfaces. In Proceedings of the 21st Annual ACM Symposium on User Interface Software and Technology, Monterey, CA, USA, 19–22 October 2008; ACM: New York, NY, USA; pp. 205–208.
- Hwang, I.; Cho, J.; Oh, S. VibeComm: Radio-Free Wireless Communication for Smart Devices Using Vibration. Sensors 2014, 14, 21151–21173. [Google Scholar] [CrossRef] [PubMed]
- GOOGLE INC. SlickLogin. Available online: http://www.slicklogin.com/ (accessed on 17 July 2015).
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.-C.; Lim, S.-C. Transferring Data from Smartwatch to Smartphone through Mechanical Wave Propagation. Sensors 2015, 15, 21394-21406. https://doi.org/10.3390/s150921394
Kim S-C, Lim S-C. Transferring Data from Smartwatch to Smartphone through Mechanical Wave Propagation. Sensors. 2015; 15(9):21394-21406. https://doi.org/10.3390/s150921394
Chicago/Turabian StyleKim, Seung-Chan, and Soo-Chul Lim. 2015. "Transferring Data from Smartwatch to Smartphone through Mechanical Wave Propagation" Sensors 15, no. 9: 21394-21406. https://doi.org/10.3390/s150921394
APA StyleKim, S.-C., & Lim, S.-C. (2015). Transferring Data from Smartwatch to Smartphone through Mechanical Wave Propagation. Sensors, 15(9), 21394-21406. https://doi.org/10.3390/s150921394