
A Context-Aware EEG Headset System for Early Detection of Driver Drowsiness



Abstract
:1. Introduction
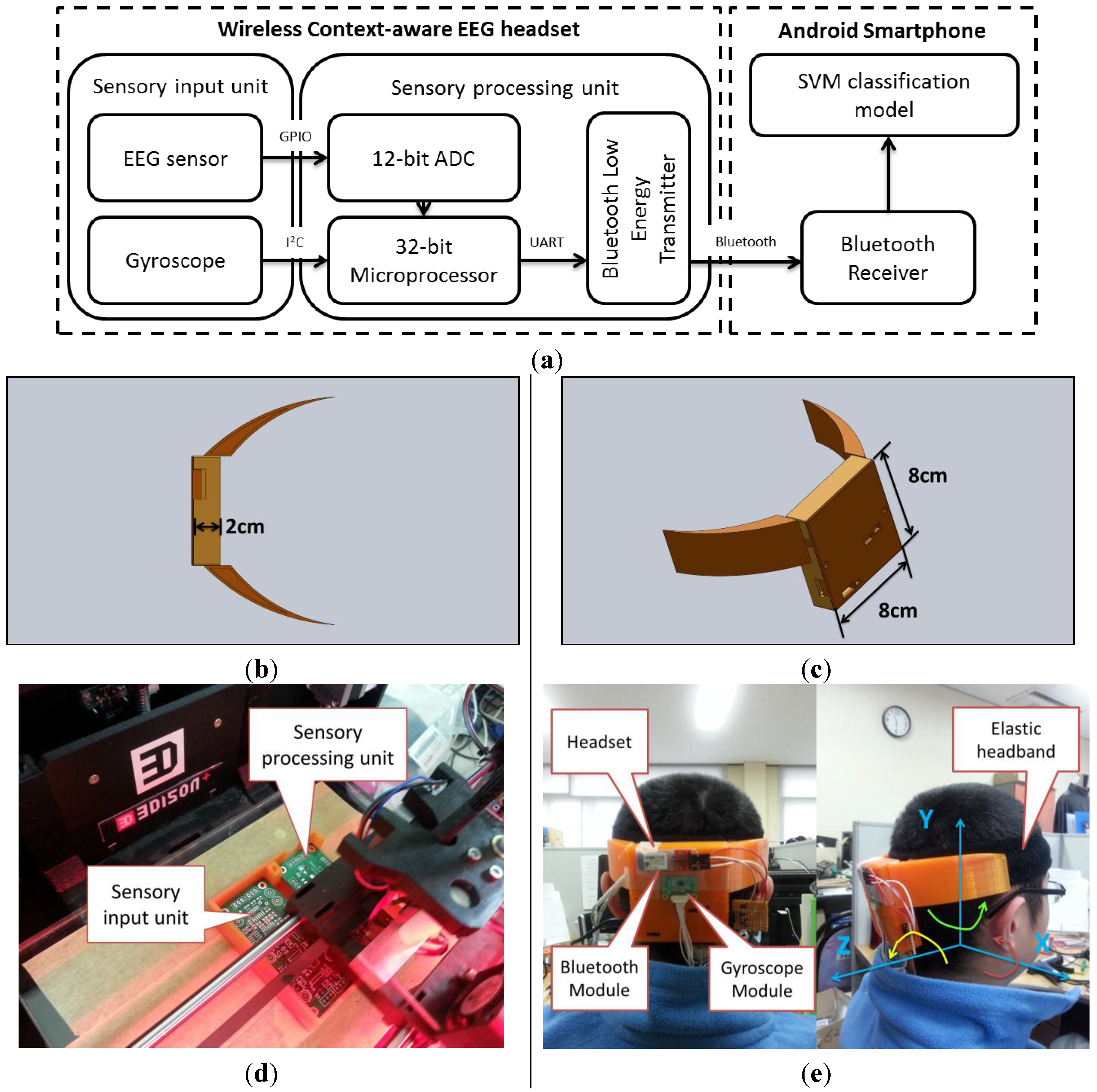
2. System Design
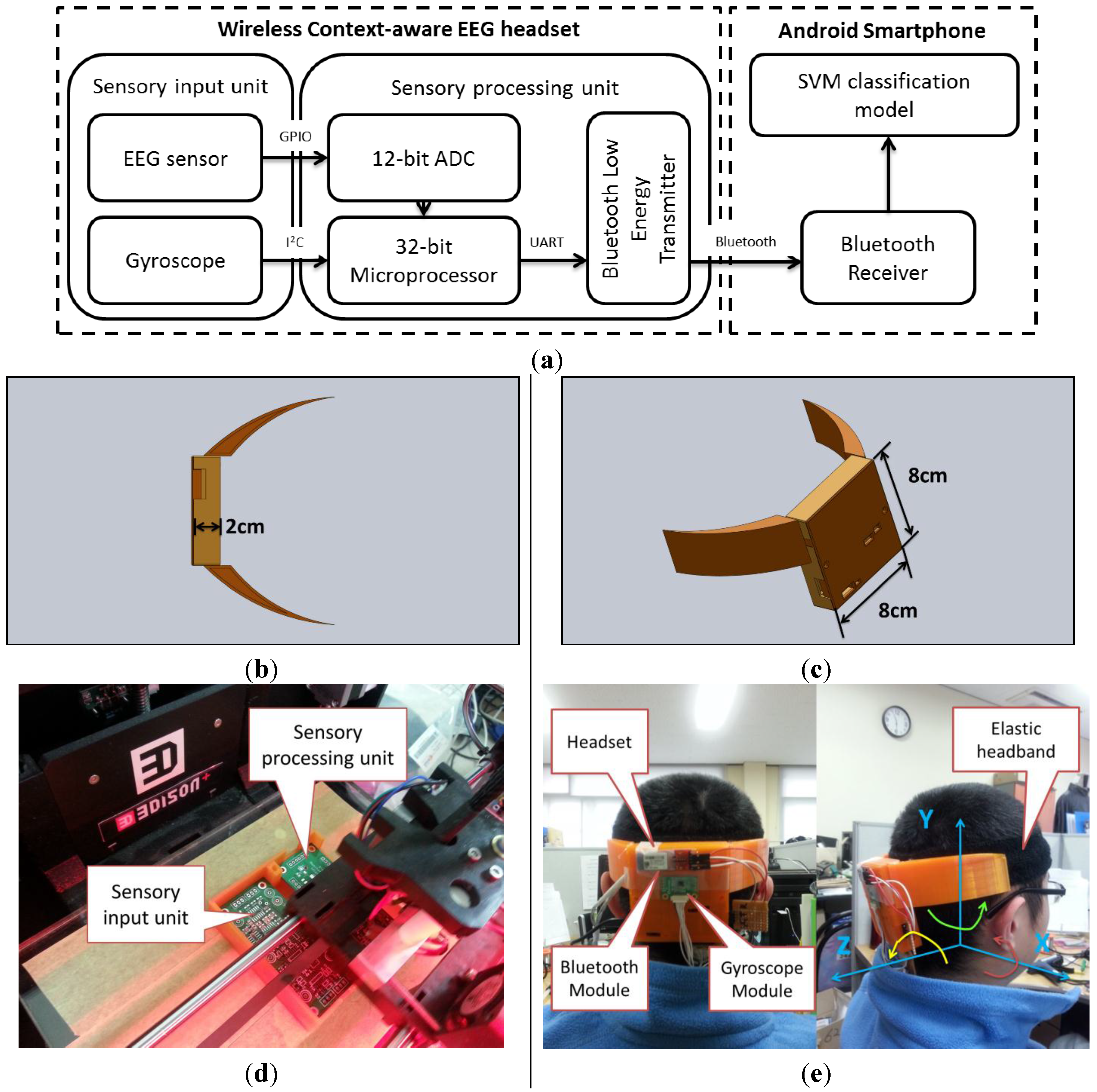
2.1. Wireless Context-Aware EEG Headset
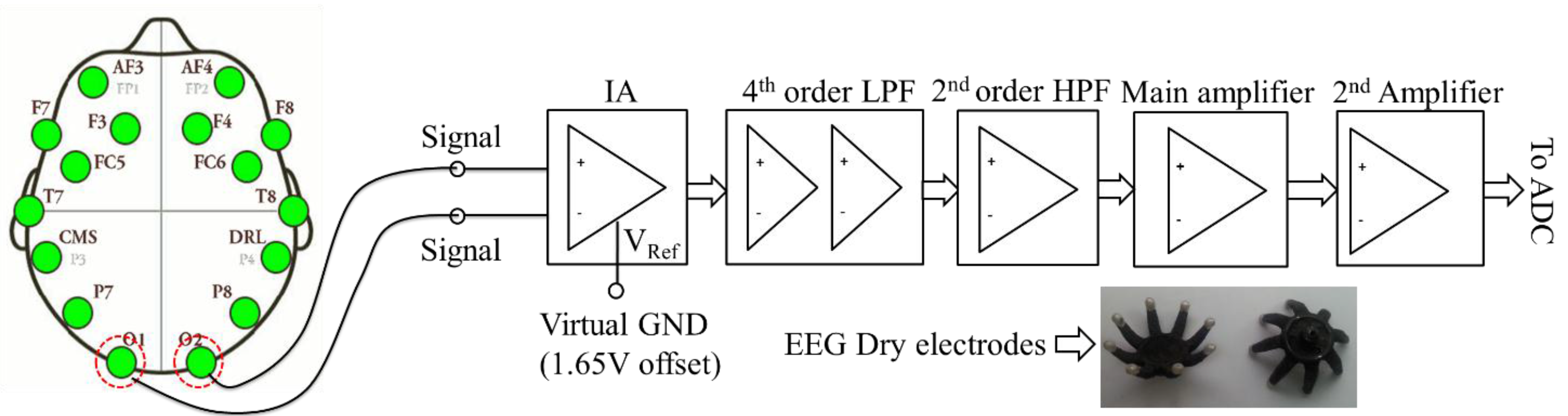
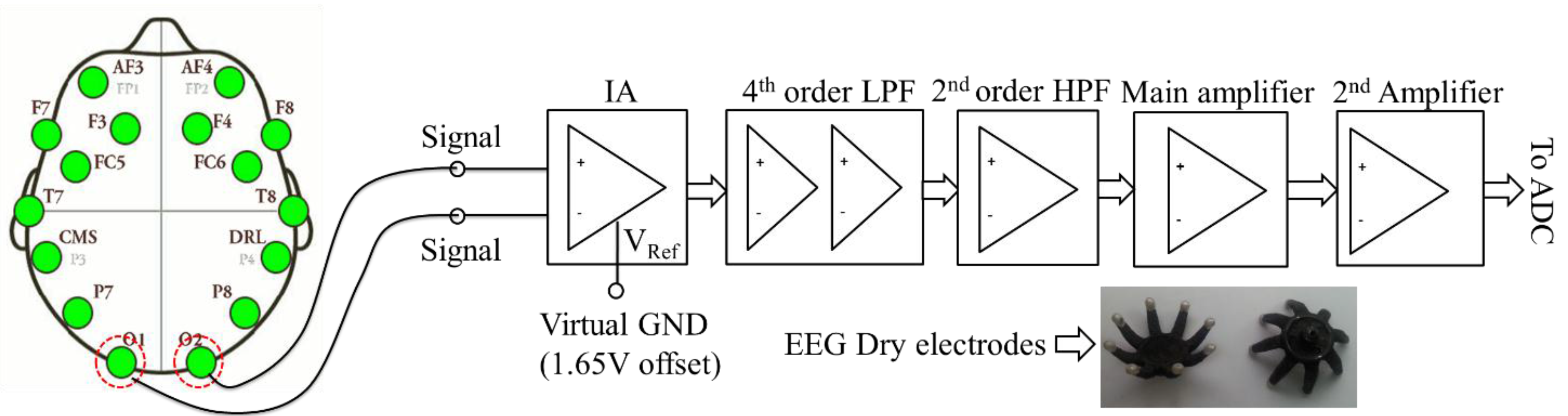
2.1.1. SIU
2.1.2. SPU
2.1.3. Signal Analysis and Feature Extraction
2.2. Classifier
2.2.1. Theoretical Principle of SVM Classifier
- 1)
- Linear kernel
- 2)
- RBF kernel
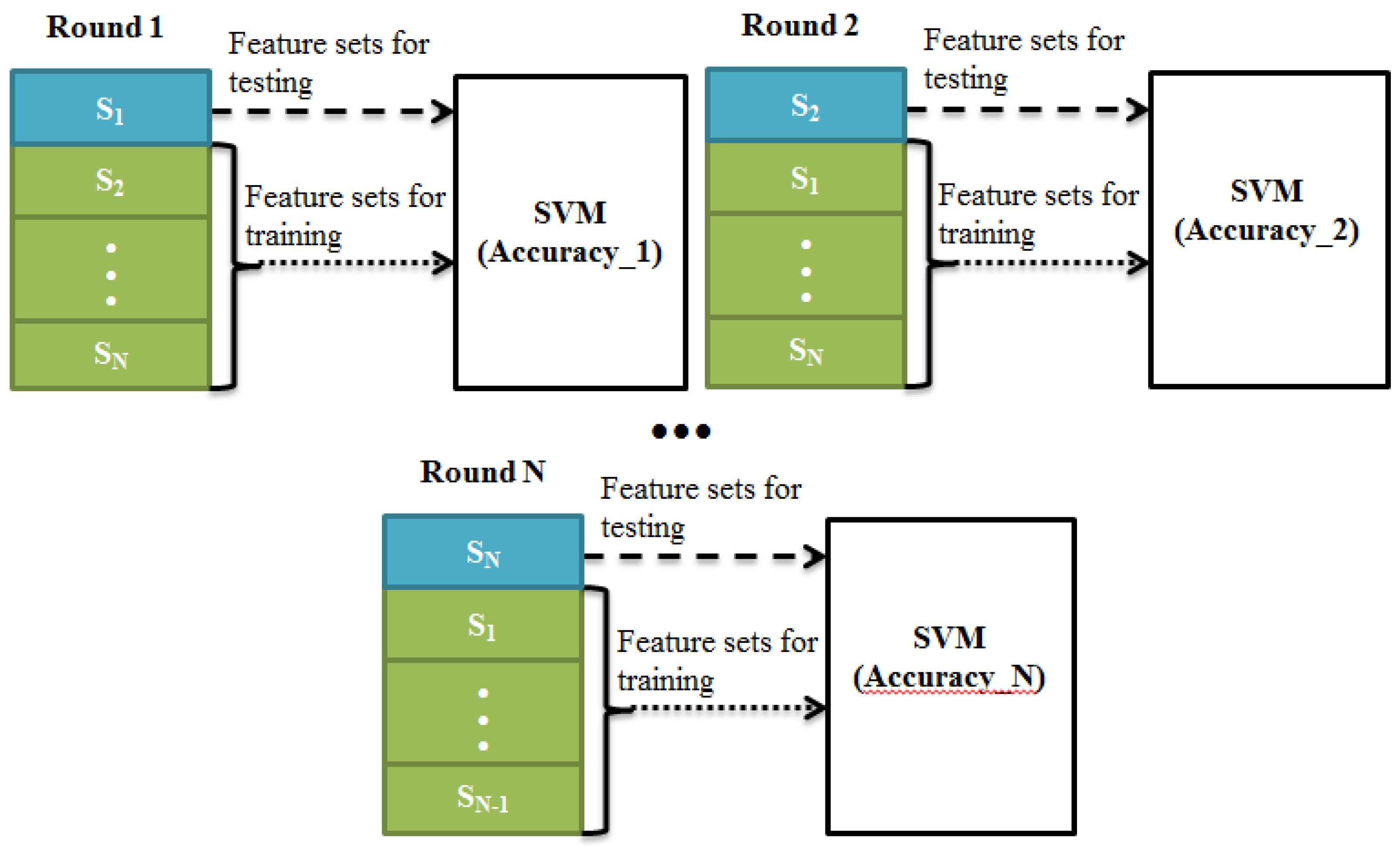
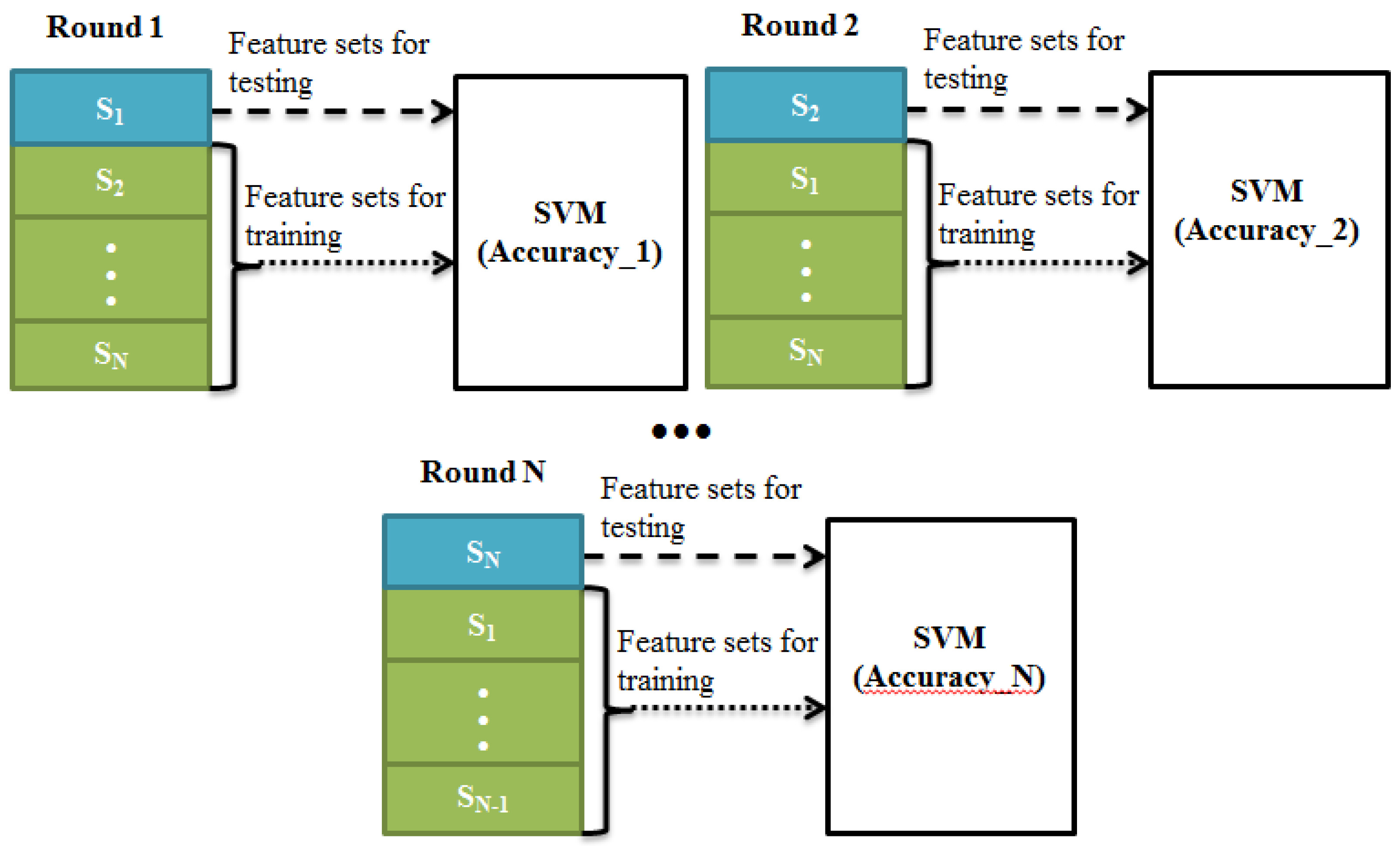
2.2.2. LOO Cross-Validation and Optimization
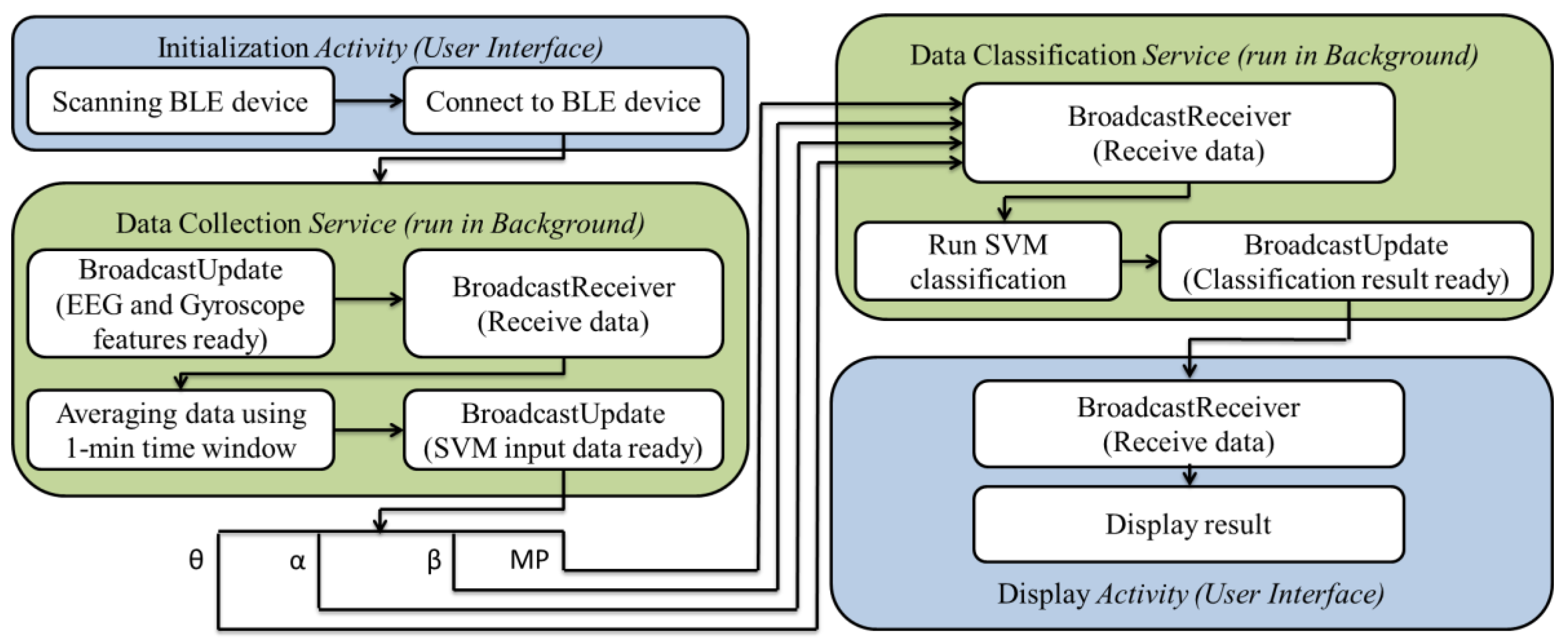
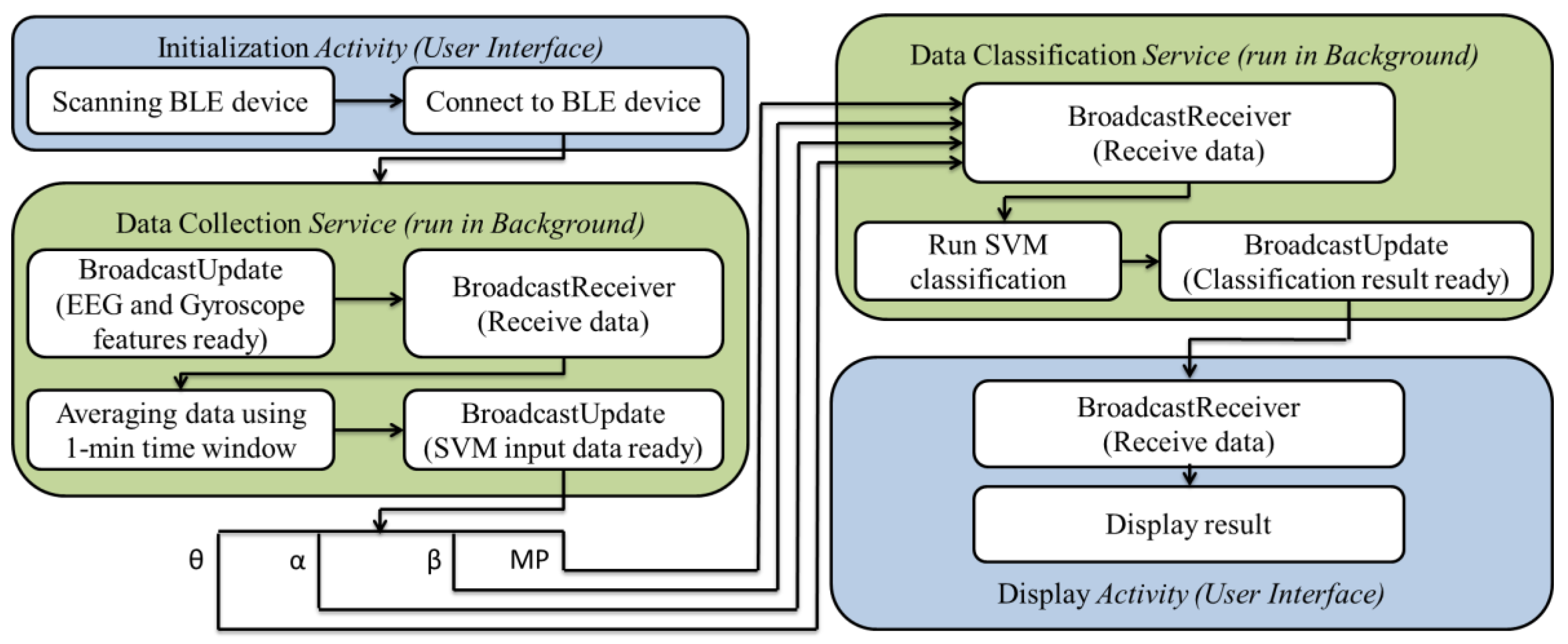
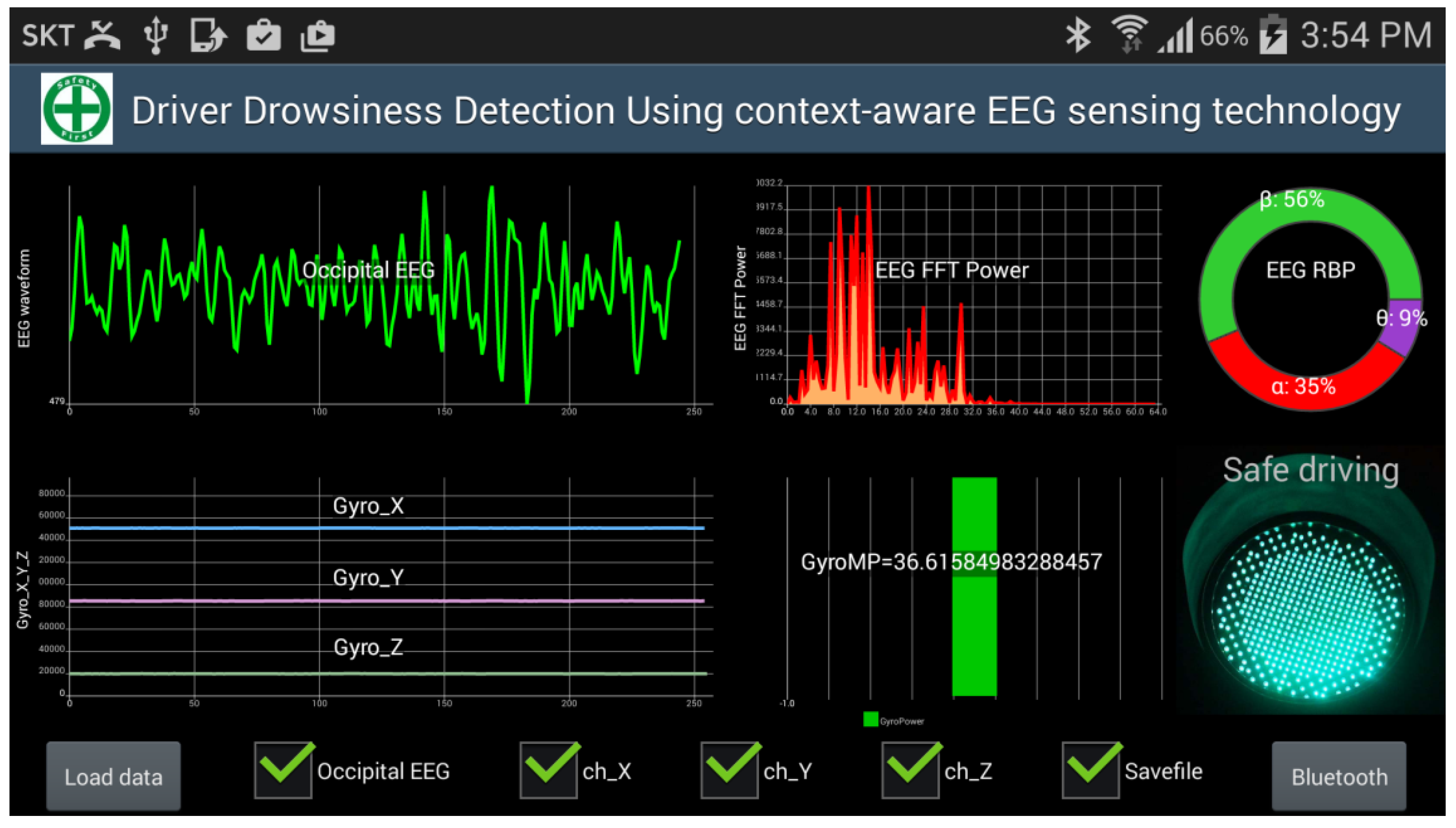
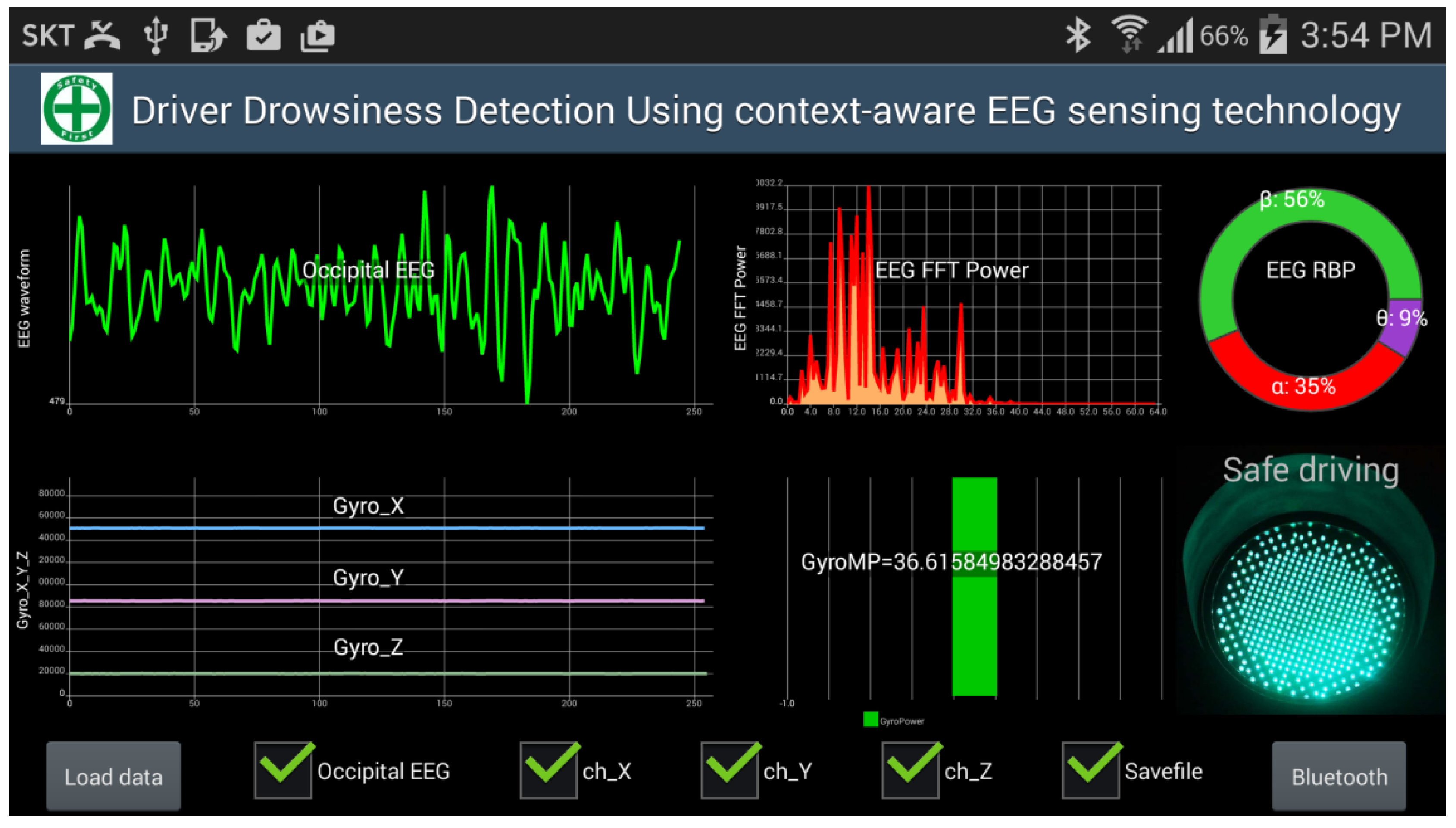
2.3. Smartphone
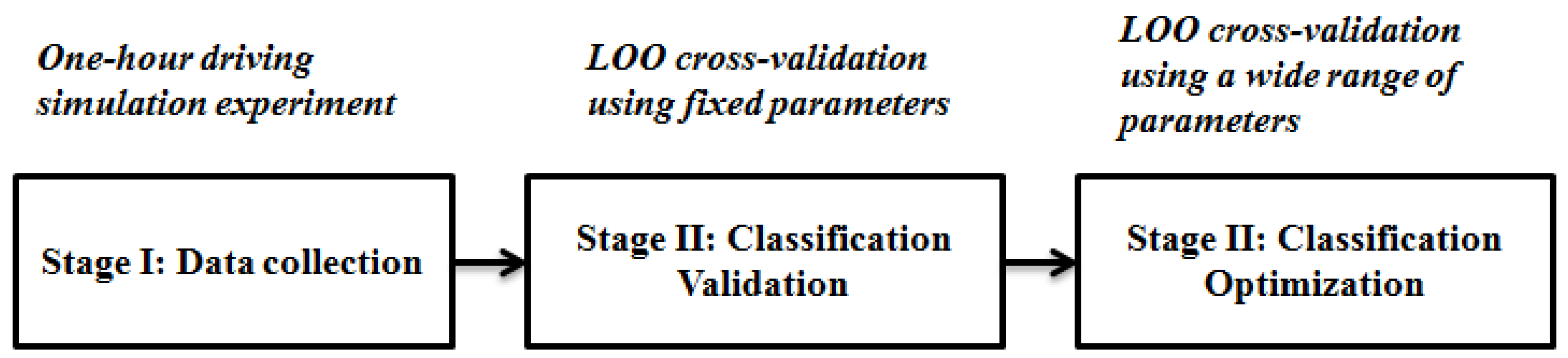
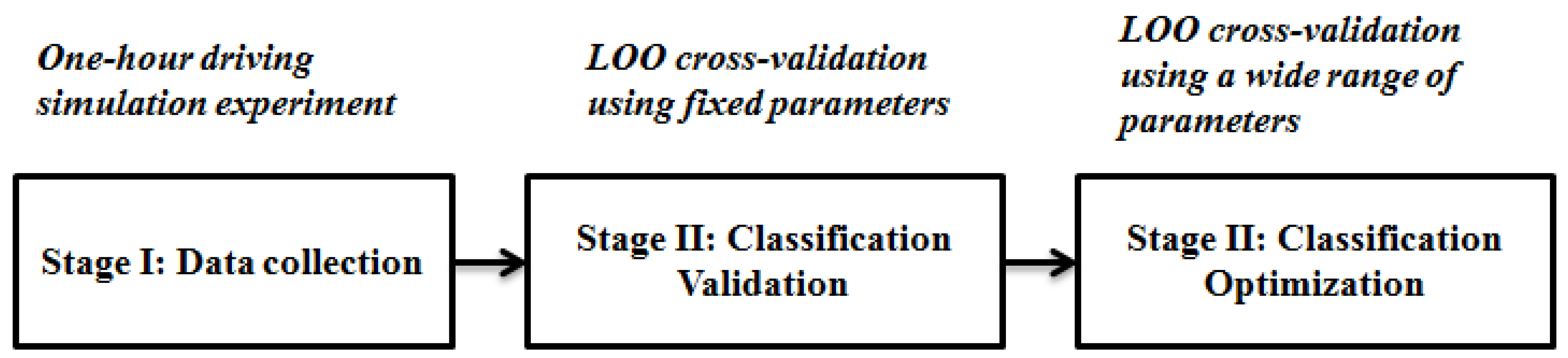
3. System Evaluation Design and Materials
4. System Evaluation Results
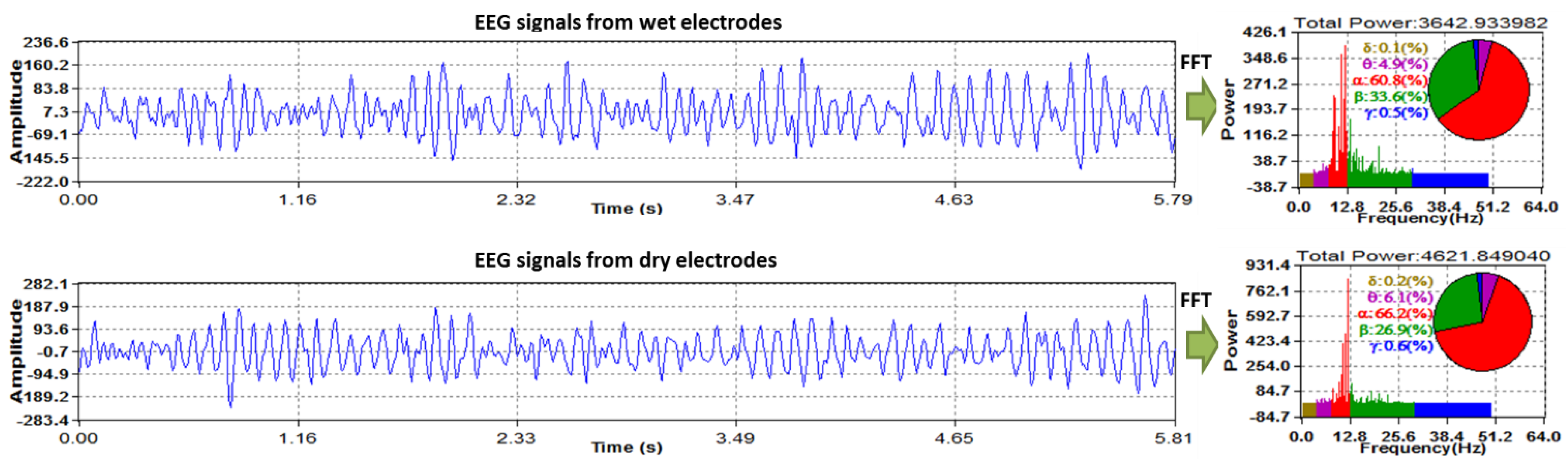
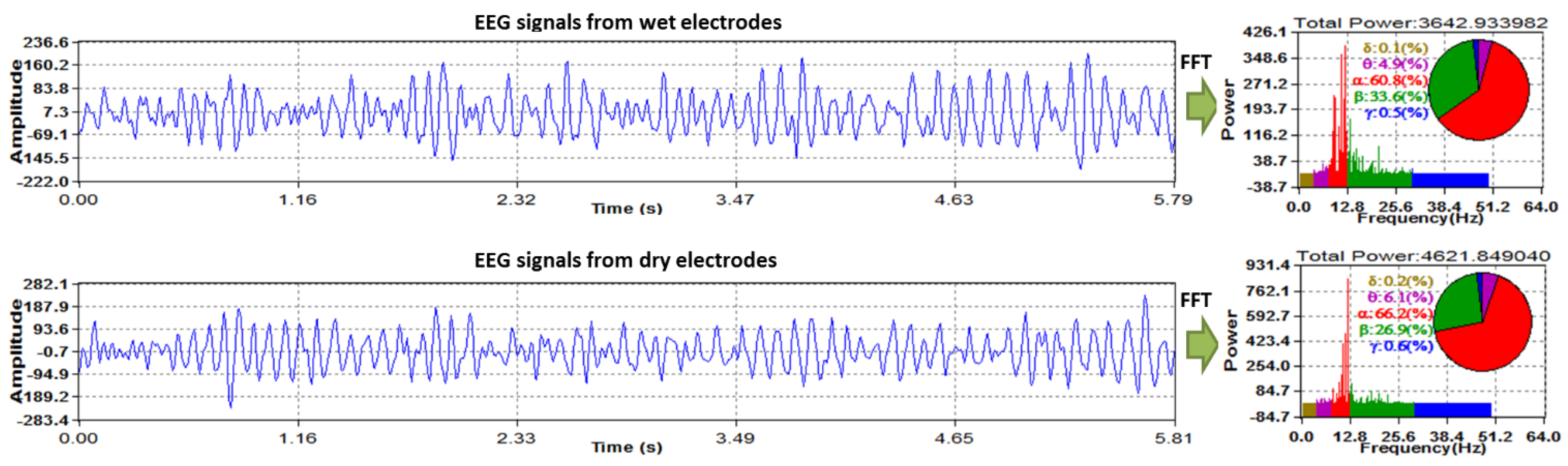
4.1. EEG Signal Quality Test
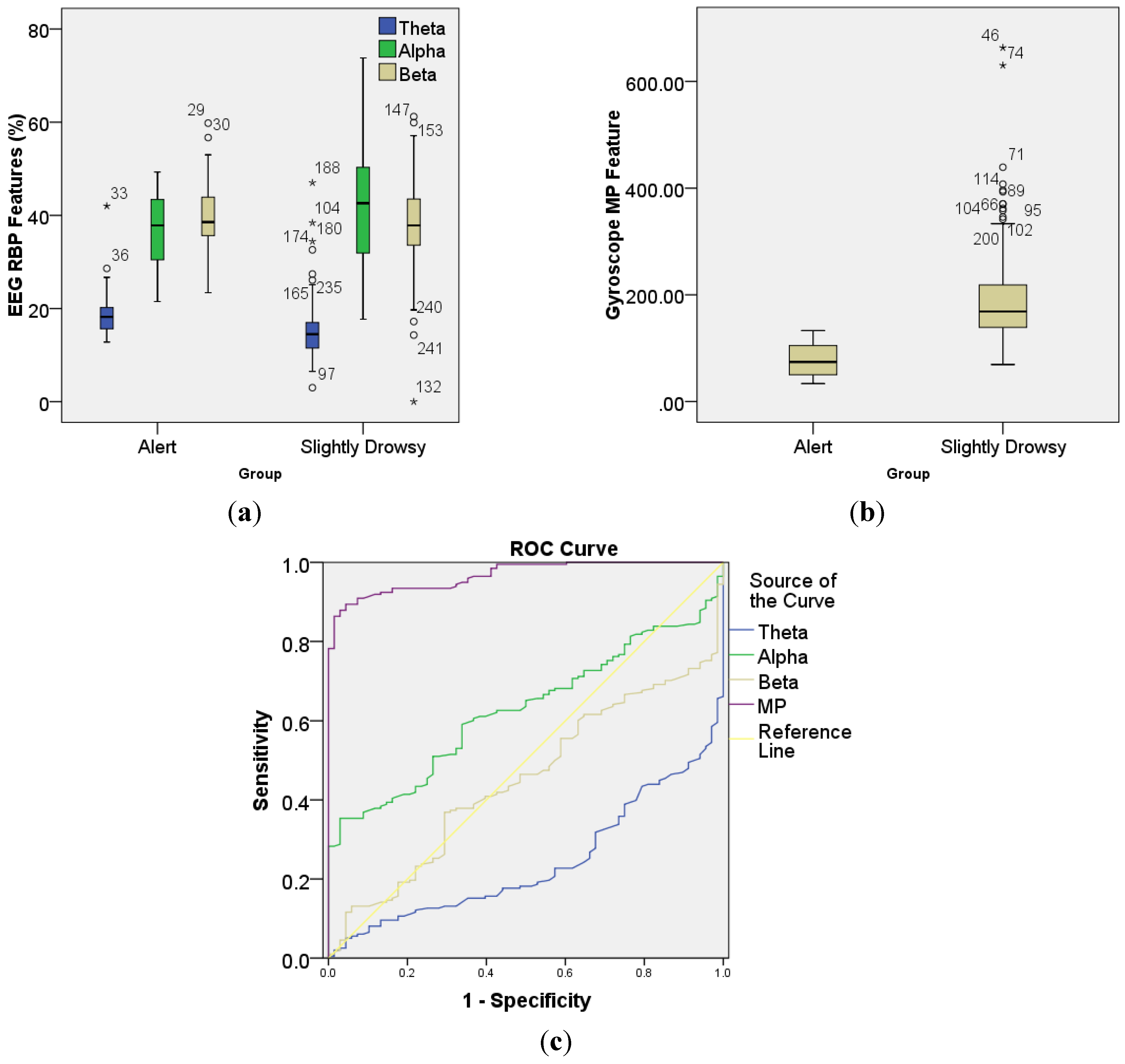
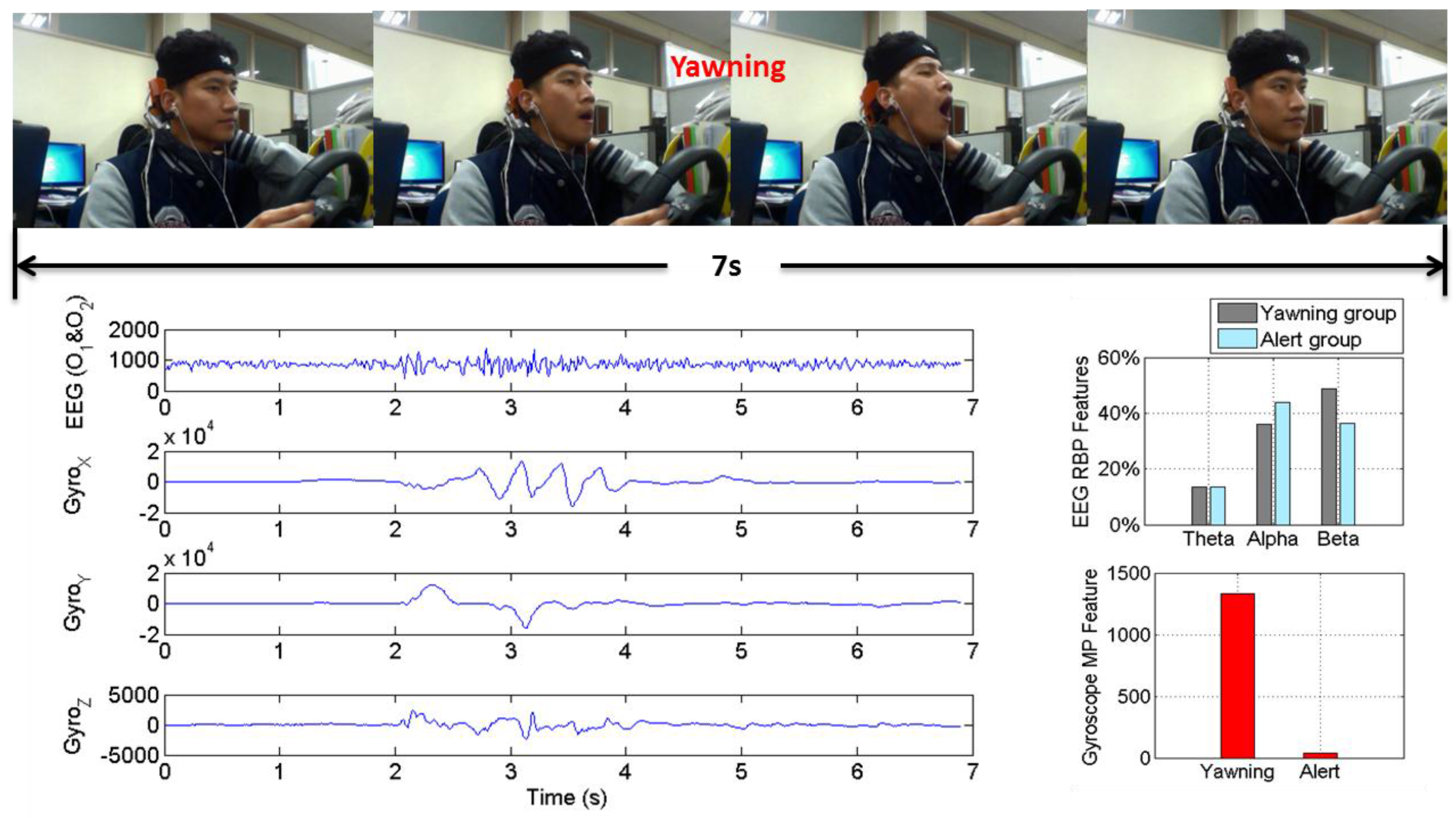
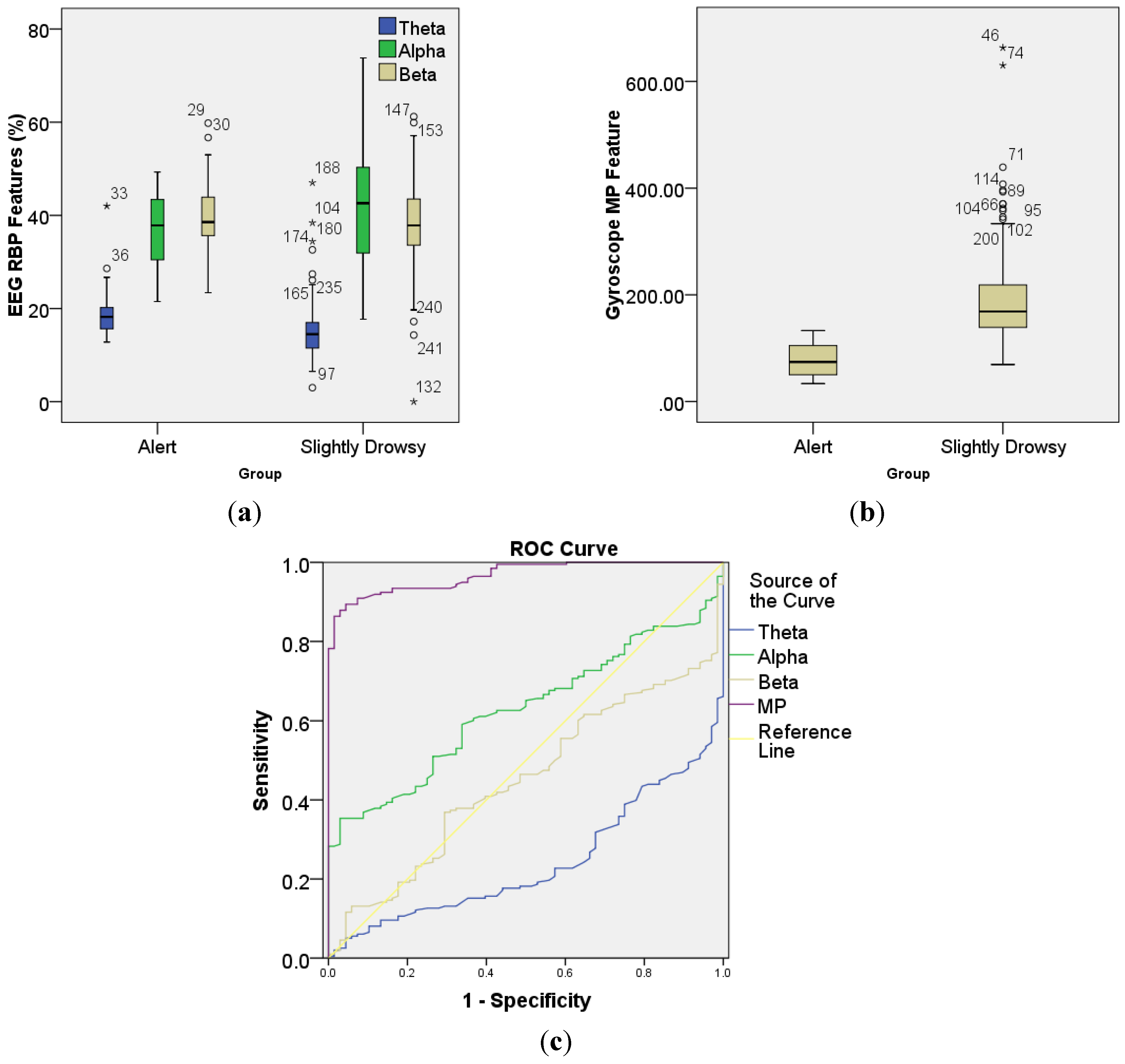
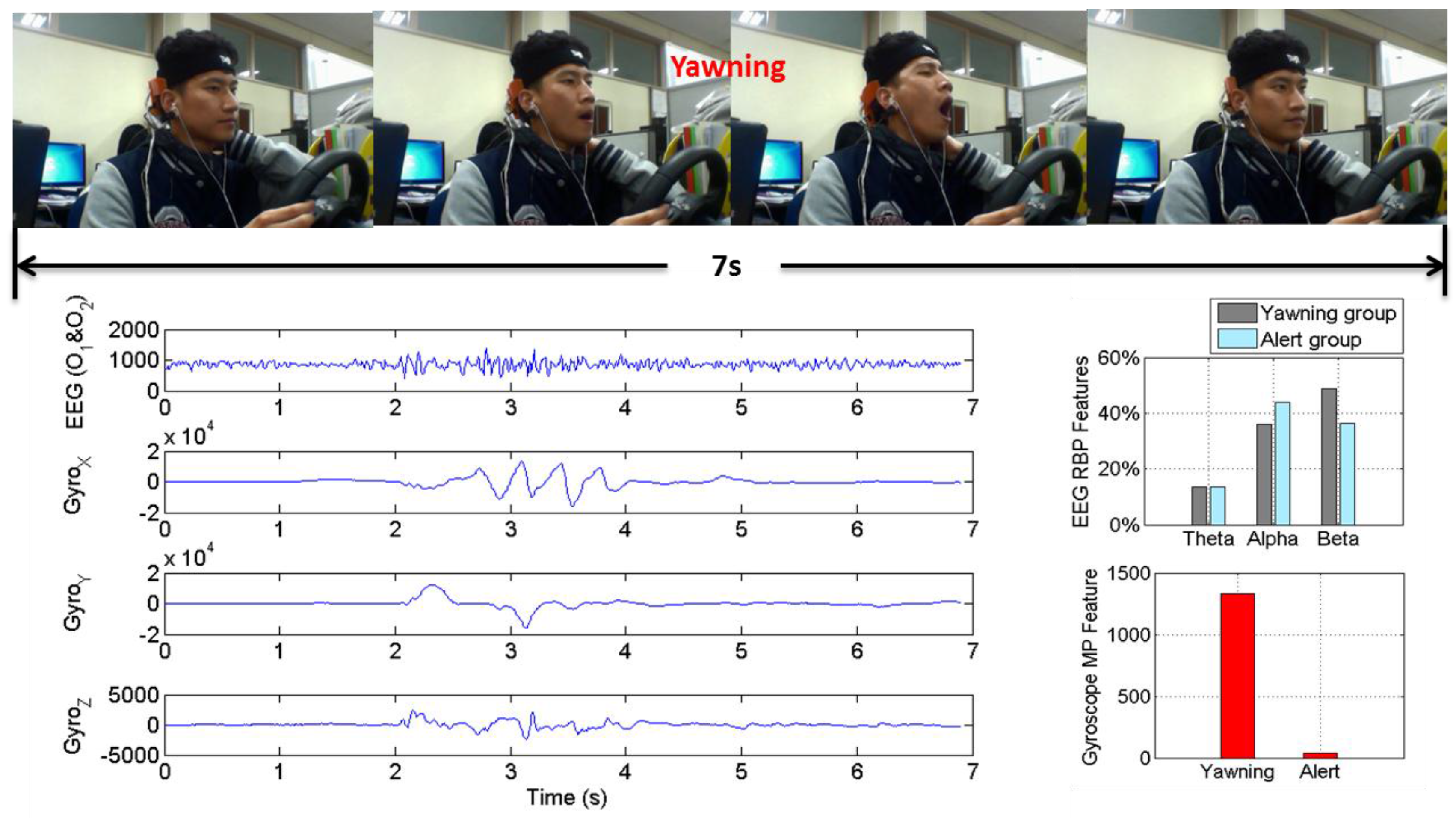
4.2. Feature Analysis
4.3. Detection Accuracy

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Kernel | EEG Features (RBP (θ), RBP (α), RBP (β)) | Gyroscope Feature MP | Hybrid Features (RBP (θ), RBP (α), RBP (β), MP) | ||||||
| Sens | Spec | Acc | Sens | Spec | Acc | Sens | Spec | Acc | |
| Linear | 100 | 0 | 74.43 | 96.46 | 63.24 | 87.96 | 96.46 | 95.59 | 96.24 |
| C = 0.01 | C = 0.01 | C = 2 | |||||||
| RBF | 95.45 | 45.59 | 82.71 | 93.43 | 91.18 | 92.86 | 96.46 | 91.18 | 95.11 |
| C = 2 | C = 1 | C = 5 | |||||||
| g = 0.1 | g = 0.01 | g = 0.01 | |||||||
4.4. Real-Time Performance
| Condition | Feature Extraction Approach | Power Consumption (mA) | Battery Life (h) | |
|---|---|---|---|---|
| Power supply 3.6 V | BLE | Remote | 63 | 41 |
| Battery capacity: 2600 mA·h | On chip | 56 | 46 | |
| Sampling rate: 128 Hz | Bluetooth v2.0 EDR+ | Remote | 82 | 32 |
| ADC resolution: 12 bits | On chip | 75 | 35 | |
| Bluetooth (slave) : Active | ||||
| Baud-rate: 115,200 bps | ||||
5. Discussion
5.1. Principle Results
5.2. Comparison with Prior Work
5.2.1. EEG versus Other Physiological Signals
5.2.2. Signal Processing Comparison
5.2.3. Detection Accuracy Comparison
5.3. Limitation
6. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kim, I.S. The risk of accidents using DMB and smartphone when driving. Traffic 2012, 172, 32–36. [Google Scholar]
- Korean Expressway Corporation. 24% Decrease in Death in Highway Traffic Accidents Last Year. Yearly Report. Available online: http://www.ex.co.kr/portal/cus/public_relations/press_release/1197307_3960.jsp?clickParentNum=3&clickNum=40&pageRow=10&startRow=5&pageURL=/portal/cus/public_relations/press_release/bodo_list (accessed on 18 August 2014).
- Korean Expressway Corporation. Significant Decrease in Death in Highway Traffic Accidents. Yearly Report. Available online: http://www.ex.co.kr/portal/cus/public_relations/press_release/1194829_3960.jsp?clickParentNum=3&clickNum=40&pageRow=10&startRow=21&pageURL=/portal/cus/public_relations/press_release/bodo_list (accessed on 18 August 2014).
- Swarnkar, V.; Abeyratne, U.; Hukins, C. The Objective measure of sleepiness and sleep latency via bispectrum analysis of EEG. Med. Biol. Eng. Comput. 2010, 48, 1203–1213. [Google Scholar] [CrossRef] [PubMed]
- Ingre, M.; ÅKerstedt, T.; Anund, B.A.; Kecklund, G. Subjective sleepiness, simulated driving performance and blink duration: Examining individual differences. J. Sleep Res. 2006, 15, 47–53. [Google Scholar] [CrossRef] [PubMed]
- Otmani, S.; Pebayle, T.; Roge, J.; Muzet, A. Effect of driving duration and partial sleep deprivation on subsequent alertness and performance of car drivers. Physiol. Behav. 2005, 84, 715–724. [Google Scholar] [CrossRef] [PubMed]
- Boyraz, P.; Hansen, J.H.L. Active Accident Avoidance Case Study: Integrating Drowsiness Monitoring System with Lateral Control and Speed Regulation in Passenger Vehicles. In Proceedings of the IEEE the International Conference Vehicular Electronics and Safety, Columbus, OH, USA, 22–24 September 2008; pp. 293–298.
- Thiffault, P.; Bergeron, J. Monotony of road environment and driver fatigue: A simulator study. Accid. Anal. Prev. 2003, 35, 381–391. [Google Scholar] [CrossRef]
- Dinges, D.F.; Grace, R. PERCLOS: A Valid Psychophysiological Measure of Alertness as Assessed by Psychomotor Vigilance. Available online: http://ntl.bts.gov/lib/10000/10100/10114/tb98-006.pdf (accessed on 18 August 2014).
- Dinges, D.F.; Grace, R. Research on Vehicle-Based Driver Status/Performance Monitoring; Development, Validation, and Refinement of Algorithms for Detection of Driver Drowsiness. Available online: http://ntl.bts.gov/lib/5000/5900/5911/887.pdf (accessed on 18 August 2014).
- Hanowski, R.J.; Blanco, M.; Nakata, A.; Hickman, J.S.; Schaudt, W.A.; Fumero, M.C.; Olson, R.L.; Jermeland, J.; Greening, M.; Holbrook, G.T.; et al. The Drowsy Driver Warning System Field Operational Test: Data Collection Methods. Available online: http://www.nhtsa.gov/DOT/NHTSA/NRD/Multimedia/PDFs/Crash Avoidance/2008/810035.pdf (accessed on 9 March 2015).
- Li, G.; Chung, W.Y. Estimation of eye closure degree using EEG sensors and its application in driver drowsiness detection. Sensors 2014, 14, 17491–17515. [Google Scholar] [CrossRef] [PubMed]
- Li, G.; Chung, W.Y. Detection of driver drowsiness using wavelet analysis of heart rate variability and a support vector machine classifier. Sensors 2013, 13, 16494–16511. [Google Scholar]
- Jung, S.J.; Shin, H.S.; Chung, W.Y. Driver fatigue and drowsiness monitoring system with embedded electrocardiogram sensor on steering wheel. Intell. Transp. Syst. 2014, 8, 43–50. [Google Scholar] [CrossRef]
- Papadelis, C.; Kourtidou-Papadeli, C.; Bamidis, P.D.; Chouvarda, I. Indicators of Sleepiness in an ambulatory EEG study of night driving Christos. In Proceedings of the IEEE International Conference Engineering in Medicine and Biology Society, New York, NY, USA, 30 August–3 September 2006; pp. 6201–6204.
- Sahayadhas, A.; Sundaraj, K.; Murugappan, M. Detecting Driver Drowsiness Based on Sensors: A Review. Sensors 2012, 12, 16937–16953. [Google Scholar] [CrossRef] [PubMed]
- Iber, C.; Sonia, A.I.; Andrew, L.; Chesson, J.; Quan, S.F. The AASM Manual for the Scoring of Sleep and Associated Events. Available online: http://www.nswo.nl/userfiles/files/AASM%20-%20Manual%20for%20the%20Scoring%20ofSleep%20and%20Associted%20Events%20%2005-2007_2.pdf (accessed on 18 August 2014).
- Khushaba, R.N.; Kodagoda, S.S.; Lal, S.; Dissanayake, G. Driver drowsiness classification using fuzzy wavelet-packet-based feature-extraction algorithm. IEEE Trans. Biomed. Eng. 2011, 58, 121–131. [Google Scholar]
- Akin, M.; Kurt, M.B.; Sezgin, N.; Bayram, M. Estimating vigilance level by using EEG and EMG signals. J. Neural Comput. Applic. 2008, 17, 227–236. [Google Scholar] [CrossRef]
- Lin, C.T.; Chang, C.J.; Lin, B.S.; Hung, S.H.; Chao, C.F.; Wang, I.J. A Real-Time Wireless Brain–Computer Interface System for Drowsiness Detection. IEEE Trans. Biomed. Circuits Syst. 2010, 4, 214–222. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.T.; Cheng, C.K.; Huang, K.C.; Lin, C.T. Cell-Phone Based Drowsiness Monitoring and Management System. In Proceedings of the IEEE International. Conference. Biomedical Circuits and Systems, Hsinchu, Taiwan, 28–30 November 2012; pp. 200–203.
- Lin, C.T.; Chuang, C.H.; Huang, C.S.; Tsai, S.F.; Lu, S.W.; Chen, Y.H.; Ko, L.W. Wireless and Wearable EEG System for Evaluating Driver Vigilance. IEEE Trans. Biomed. Circuits Syst. 2014, 8, 165–176. [Google Scholar] [PubMed]
- Wierwille, W.W.; Ellsworth, L.A. Evaluation of driver drowsiness by trained raters. Accid. Anal. Prev. 1994, 26, 571–581. [Google Scholar] [CrossRef]
- Vural, E.; Cetin, M.; Ercil, A.; Littlewort, G.; Bartlett, M.; Movellan, J. Automated drowsiness detection for improved driving safety. In Proceedings of the International. Conference. Automotive Technologies, Istanbul, Turkey, 13–14 November 2008; pp. 1–15.
- Regan, S.O.; Faul, S.; Marnane, W. Automatic detection of EEG artefacts arising from head movements using EEG and gyroscope signals. Med. Eng. Phys. 2013, 35, 867–874. [Google Scholar]
- Regan, S.O.; Marnane, W. Multimodal detection of head-movement artefacts in EEG. J. Neurosci. Methods 2013, 218, 110–120. [Google Scholar]
- Emotiv EPOC EEG Acquisition Device. Available online: https://emotiv.com/epoc.php (accessed on 2 July 2015).
- Bluetooth 4.0 Low Energy Mini Module. Available online: http://redbearlab.com (accessed on 2 July 2015).
- Li, M.A.; Zhang, C.; Yang, J.F. An EEG-based Method for Detecting Drowsy Driving State. In Proceedings of the 7th International. Conference. Fuzzy Systems and Knowledge Discovery, Yantai, China, 10–12 August 2010; pp. 2164–2167.
- Maglione, A.; Borghini, G.; Arico, P.; Borgia, F.; Graziani, I.; Colosimo, A.; Kong, W.; Vecchiato, G.; Babiloni, F. Evaluation of the workload and drowsiness during car driving by using high resolution EEG activity and neurophysiologic indices. In Proceedings of the IEEE International Conference. Engineering in Medicine and Biology Society, Chicago, IL, USA, 26–30 August 2014; pp. 6238–6241.
- De Rosario, H.; Solaz, J.S.; Rodriguez, N.; Bergasa, L.M. Controlled inducement and measurement of drowsiness in a driving simulator. Intell. Transp. Syst. 2010, 4, 280–288. [Google Scholar] [CrossRef]
- Ear-Clip Electrode. Available online: http://www.laxtha.com/ProductView.asp?Model=LXEL-EAR-01&catgrpid=1&catidx=30 (accessed on 2 July 2015).
- Dry electrode for hair. Available online: http://www.cognionics.com/index.php/products/sensors-/flex (accessed on 2 July 2015).
- Lin, C.T.; Chuang, C.H.; Wang, Y.K.; Tsai, S.F.; Chiu, T.C.; Ko, L.W. Neurocognitive characteristics of the driver: A review on drowsiness, distraction, navigation, and motion sickness. J. Neurosci. Neuroengin. 2012, 1, 61–81. [Google Scholar] [CrossRef]
- Chi, Y.M.; Ng, P.; Kang, E.; Kang, J.; Fang, J.; Cauwenberghs, G. Wireless non-contact cardiac and Neural monitoring. Available online: http://www.isn.ucsd.edu/pubs/wh2010.pdf (accessed on 2 July 2015).
- Jap, B.T.; Lal, S.; Fischer, P. Comparing combinations of EEG activity in train drivers during monotonous driving. Expert Syst. Appl. 2011, 38, 996–1003. [Google Scholar]
- Lo, B.; Yang, G.Z. Wireless Sensor Development Platforms in Body Sensor Networks, 1st ed.; Springer: London, UK, 2006; p. 407. [Google Scholar]
- Chang, D.W.; Liang, S.F.; Young, C.P.; Shaw, F.Z.; Su, A.W.Y.; Liu, Y.D.; Wang, Y.L.; Liu, Y.C.; Chen, J.J.; Chen, C.Y. A versatile wireless portable monitoring system for brain-behavior approaches. IEEE J. Emerg. Sel. Top. Circuits Syst. 2012, 1, 440–450. [Google Scholar] [CrossRef]
- Chang, C.C.; Lin, C.J. LIBSVM: A library for support vector machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 27:1–27:27. [Google Scholar] [CrossRef]
- Theodoridis, S.; Pikrakis, A.; Koutroumbas, K.; Cavouras, D. The Receiver Operating Characteristic Curve in Introduction to Pattern Recognition: A Matlab Approach, 1st ed.; Academic Press: Waltham, MA, USA, 2010; p. 113. Available online: http://www.manalhelal.com/Books/F2014/-Introduction%20to%20Pattern-%20Recognition.pdf (accessed on 2 July 2015).
- Chi, Y.M.; Jung, T.P.; Cauwenberghs, G. Dry-contact and Noncontact bio-potential electrodes: Methodological review. IEEE Rev. Biomed. Eng. 2010, 3, 106–119. [Google Scholar]
- Bluetooth Mate Gold. Available online: https://www.sparkfun.com/products/9358 (accessed on 21 August 2015).
- Malik, M. Heart rate variability: Standards of Measurement, Physiological Interpretation, and Clinical Use. Task Force of the European Society of Cardiology and the North American Society of Pacing and Electrophysiology. Eur. Heart J. 1996, 17, 354–381. [Google Scholar] [CrossRef]
- Garces, C.A.; Orosco, L.; Laciar, E. Automatic detection of drowsiness in EEG records based on multimodal analysis. Med. Eng. Phys. 2014, 36, 244–249. [Google Scholar] [CrossRef] [PubMed]
- Melia, U.; Guaita, M.; Vallverdu, M.; Embid, C.; Vilaseca, I.; Salamero, M.; Santamaria, J. Mutual information measures applied to EEG signals for sleepiness characterization. Med. Eng. Phys. 2015, 37, 297–308. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.L.; Zhao, Y.; Zhang, J.; Zou, J.J. Automatic detection of alertness/drowsiness from physiological signals using wavelet-based nonlinear features and machine learning. Expert Syst. Appl. 2015, 42, 7344–7355. [Google Scholar]
- Pritchett, S.; Zilberg, E.; Xu, Z.M.; Karrar, M.; Lal, S.; Burton, D. Strengthening association between driver drowsiness and its physiological predictors by combing EEG with measures of body movement. In Proceedings of the 6th International. Conference. Broadband Communications & Biomedical Applications, Melbourne, Australia, 21–24 November 2011; pp. 103–107.
- Lin, F.C.; Ko, L.W.; Chuang, C.H.; Su, T.P.; Lin, C.T. Generalized EEG-based drowsiness prediction system by using a self-organizing neural fuzzy system. IEEE Trans. Circuits Syst.-I Regul. Pap. 2012, 59, 2044–2055. [Google Scholar] [CrossRef]
- Khushaba, R.N.; Kodagoda, S.; Lal, S.; Dissanayake, G. Uncorrelated fuzzy neighborhood preserving analysis based feature projection for driver drowsiness recognition. Fuzzy Sets Syst. 2011, 221, 90–111. [Google Scholar] [CrossRef]
- Lin, C.T.; Chen, Y.C.; Huang, T.Y.; Chiu, T.T.; Ko, L.W.; Hsieh, H.Y.; Hsu, S.H.; Duann, J.R. Development of Wireless Brain Computer Interface With Embedded Multitask Scheduling and Its Application on Real-Time Driver’s Drowsiness Detection and Warning. IEEE Trans. Biomed. Eng. 2008, 55, 1582–1591. [Google Scholar] [CrossRef] [PubMed]
- Huang, K.C.; Jung, T.P.; Chuang, C.H.; Ko, L.W.; Lin, C.T. Preventing lapse in performance using a drowsiness monitoring and management system. In Proceedings of the IEEE the International Conference Engineering in Medicine and Biology Society, Chicago, IL, USA, 28 August–1 September 2012; pp. 3336–3339.
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, G.; Chung, W.-Y. A Context-Aware EEG Headset System for Early Detection of Driver Drowsiness. Sensors 2015, 15, 20873-20893. https://doi.org/10.3390/s150820873
Li G, Chung W-Y. A Context-Aware EEG Headset System for Early Detection of Driver Drowsiness. Sensors. 2015; 15(8):20873-20893. https://doi.org/10.3390/s150820873
Chicago/Turabian StyleLi, Gang, and Wan-Young Chung. 2015. "A Context-Aware EEG Headset System for Early Detection of Driver Drowsiness" Sensors 15, no. 8: 20873-20893. https://doi.org/10.3390/s150820873
APA StyleLi, G., & Chung, W.-Y. (2015). A Context-Aware EEG Headset System for Early Detection of Driver Drowsiness. Sensors, 15(8), 20873-20893. https://doi.org/10.3390/s150820873