
V-Alert: Description and Validation of a Vulnerable Road User Alert System in the Framework of a Smart City


Abstract
:1. Introduction
- Warning messages: these are defined as decentralized environmental notification messages and they can be sent out to each vehicle or RSU.
- Heartbeat messages or beacons: these messages are used by OBUs to report their position, speed, and identification to the RSUs in the form of FCD. Moreover, these messages are also used to keep updated information about traffic situations. For this, Wireless Access in Vehicular Environment (WAVE) defines Cooperative Awareness Messages (CAMs), which are broadcasted periodically by each vehicle.
- Non-safety messages: these are used to enhance driver information and comfort (tourism information, Internet access, navigation aid, and so on).
2. Related Work
3. First Approach: Simulated Scenario
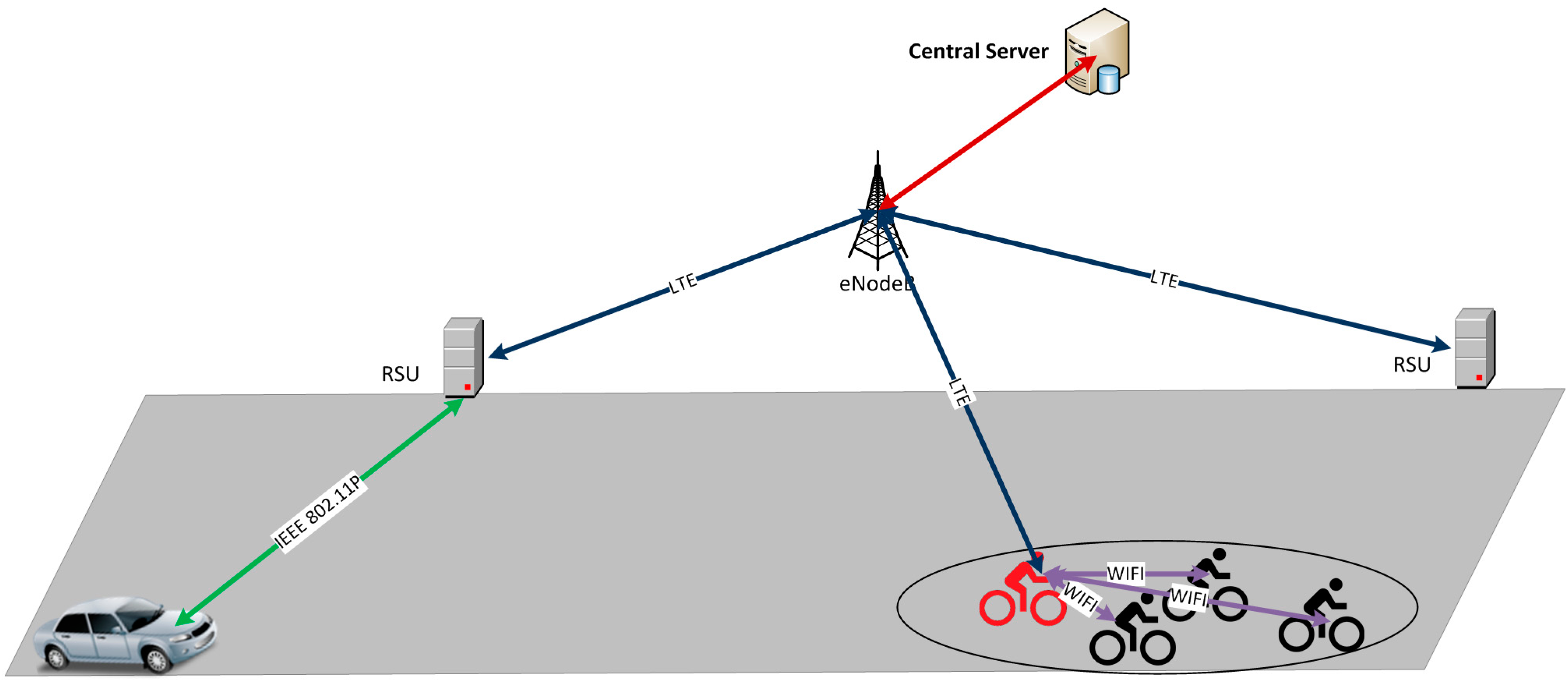
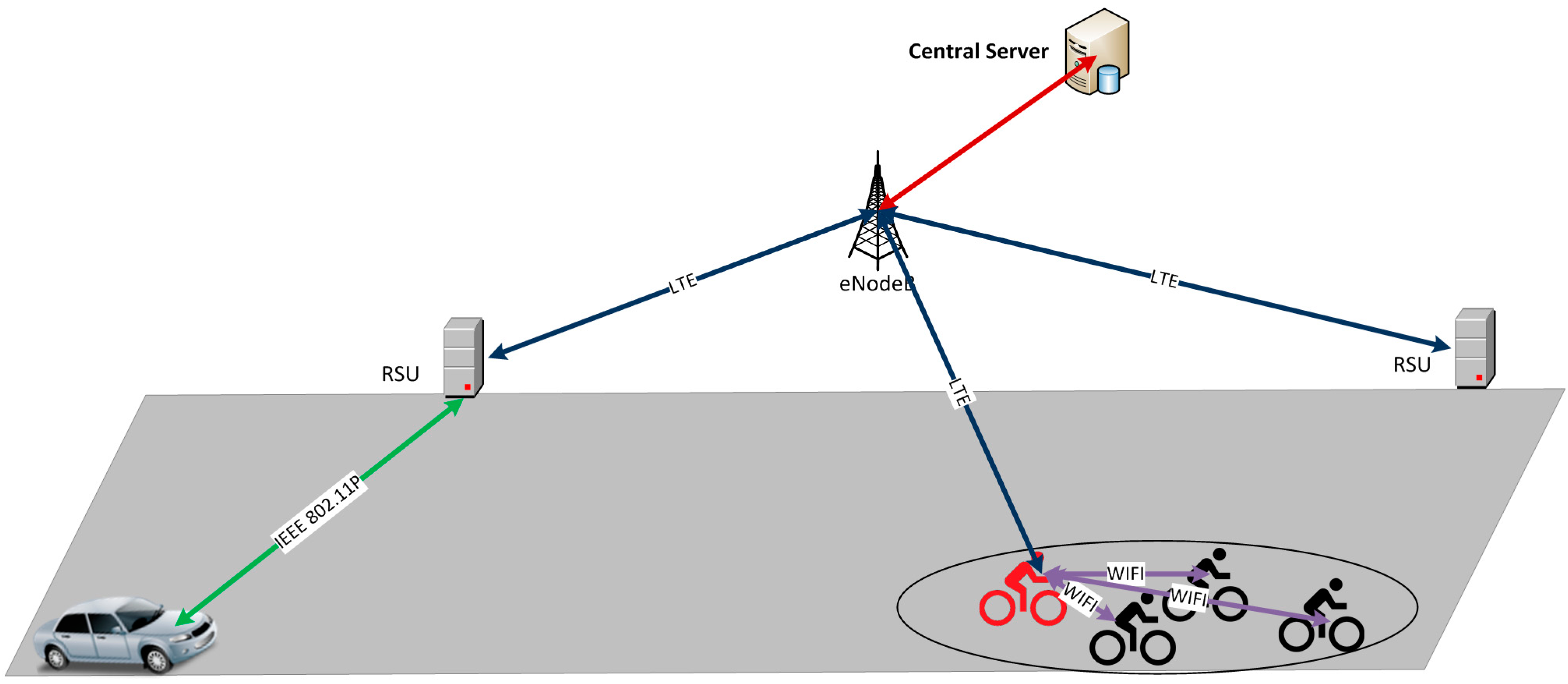
3.1. Simulated Architecture
- (1)
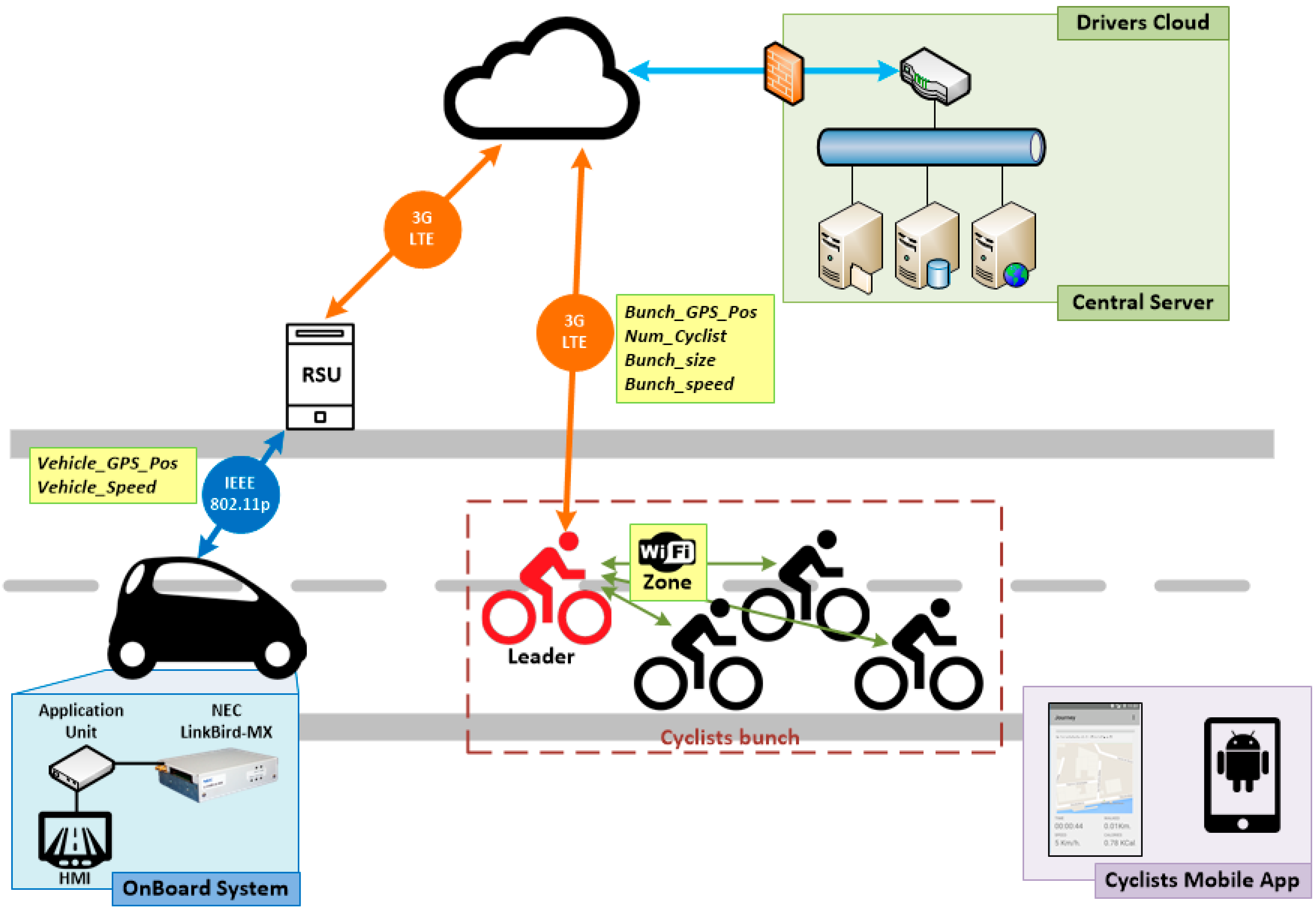
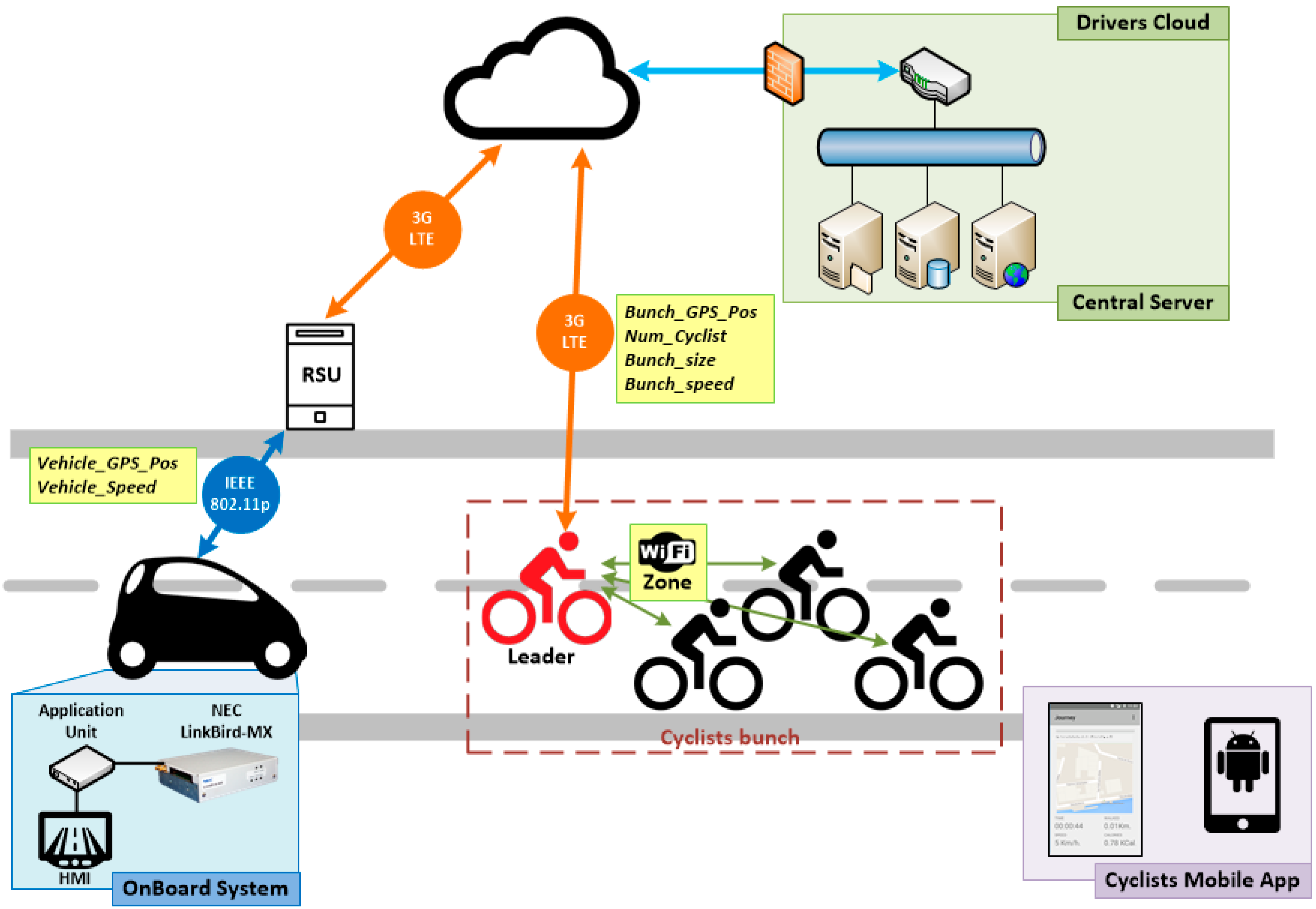
- Data collection: this phase comprises everything related to sending information to the central server. Therefore, on one hand, as every vehicle acts as a sensor sending periodic Cooperative Awareness Messages (CAMs), each RSU is able to know the position information of all the vehicles that are in its coverage area and sends updated information periodically to the central server. On the other hand, bikes are also sending periodic messages with their position information inside the Wi-Fi network; consequently, the Master Bike is able to aggregate the information about its group and sends it to the central server through LTE technology.
- (2)
- Centralized information management: the reception of updated information of the road situation by the central server allows checking which vehicles are in the route of a bike group and deciding to inform the vehicles about the presence of the bikes and to inform the bikes about the position of the vehicles.
- (3)
- Awareness message dissemination: this phase is in charge of sending the information of the vehicles to the bike group and the information of the bike group to the vehicles. Thus, the central server sends the information of the bike group to the RSUs, where the interested vehicles are in their coverage area through LTE, and the RSUs disseminate this information though IEEE 802.11p with the aim of being received by the interested vehicles. At the same time, the central server sends the information of the vehicles that are approaching to the Master Bike by LTE and the Master Bike disseminates this information to the rest of the bikes through Wi-Fi.
3.2. Simulation Setup

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Parameter | Value |
|---|---|---|
| Vehicles | CAM frequency | 1 Hz |
| RSU | TMC update frequency | CAM message received by vehicle |
| Bike | Master Bike update frequency | 1 Hz |
| Bike Master | TMC update frequency | 1 Hz |
| Scenario | Type | Suburban |
| Number of vehicles | 4 | |
| Number of bikes | 8 | |
| Vehicle speed | 10–70 km/h | |
| Bike speed | 25–30 km/h | |
| IEEE 802.11p Network | Bit Rate | 3 Mbps |
| Bandwidth | 10 MHz | |
| Frequency band | 5.9 GHz | |
| Maximum tx power | 21 dBm | |
| Propagation model | Nakagami | |
| IEEE 802.11b Network | Bit Rate | 1 Mbps |
| Bandwidth | 20 MHz | |
| Frequency band | 2.4 GHz | |
| Maximum tx power | 16 dBm | |
| Propagation model | Nakagami |
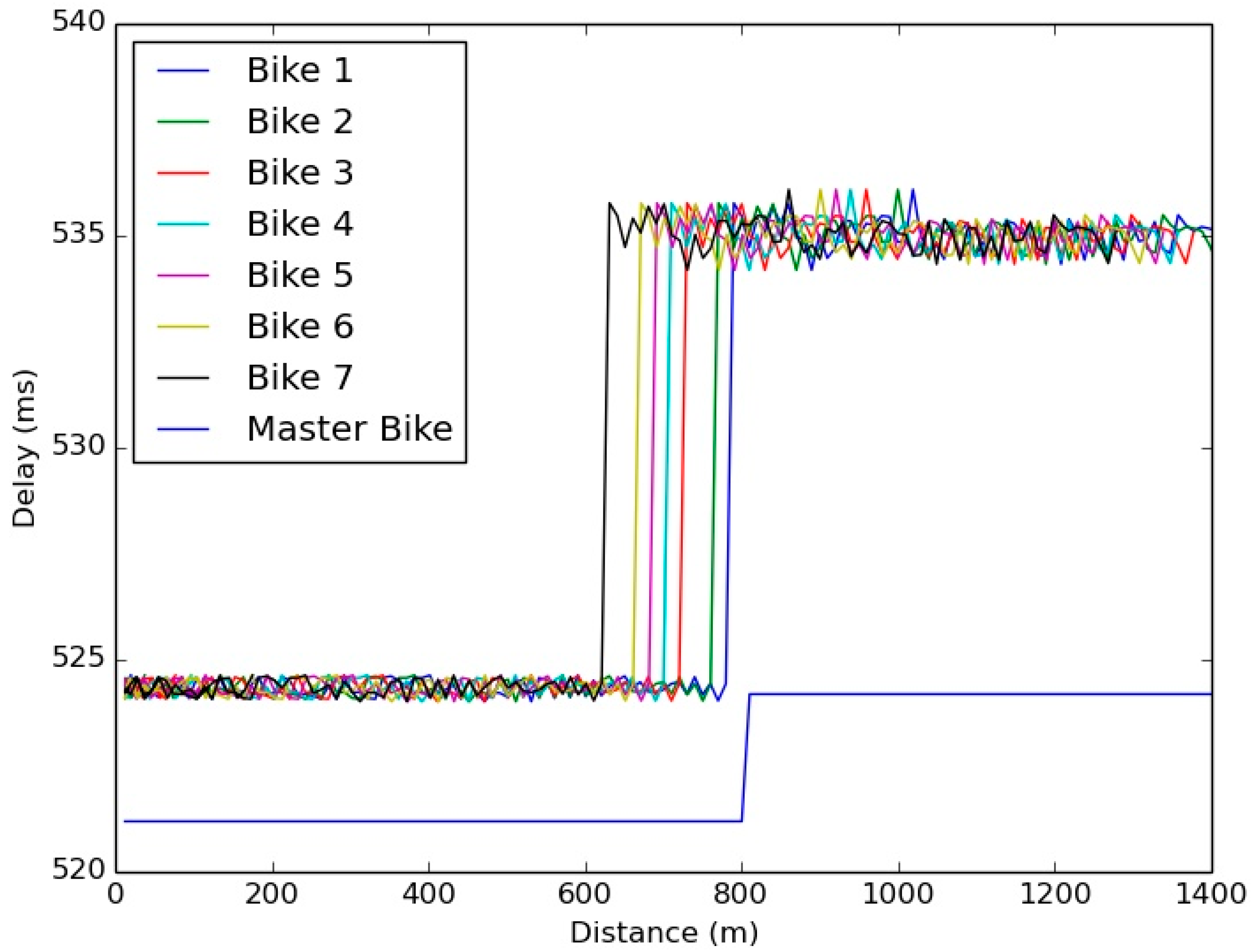
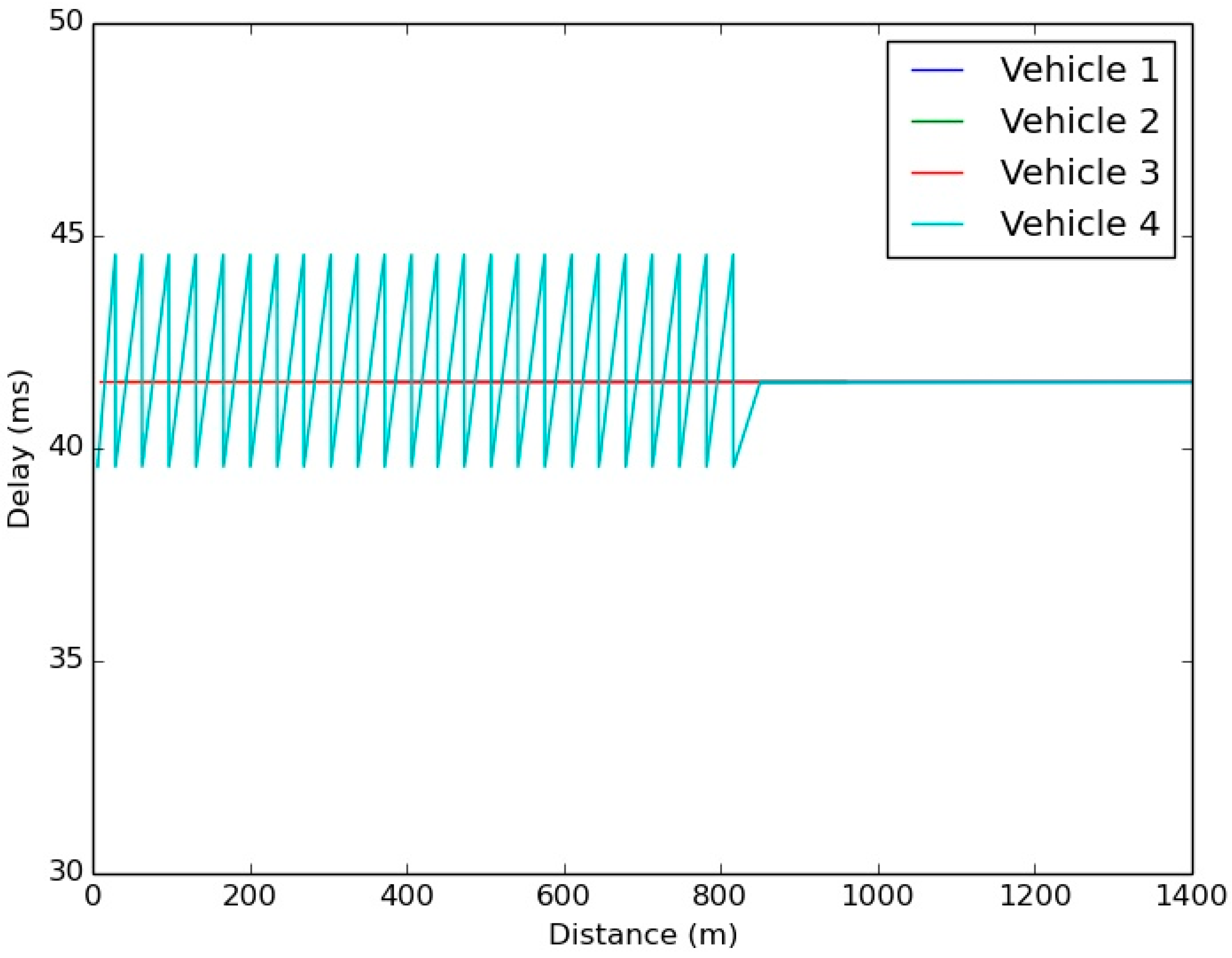
3.3. Metrics and Results
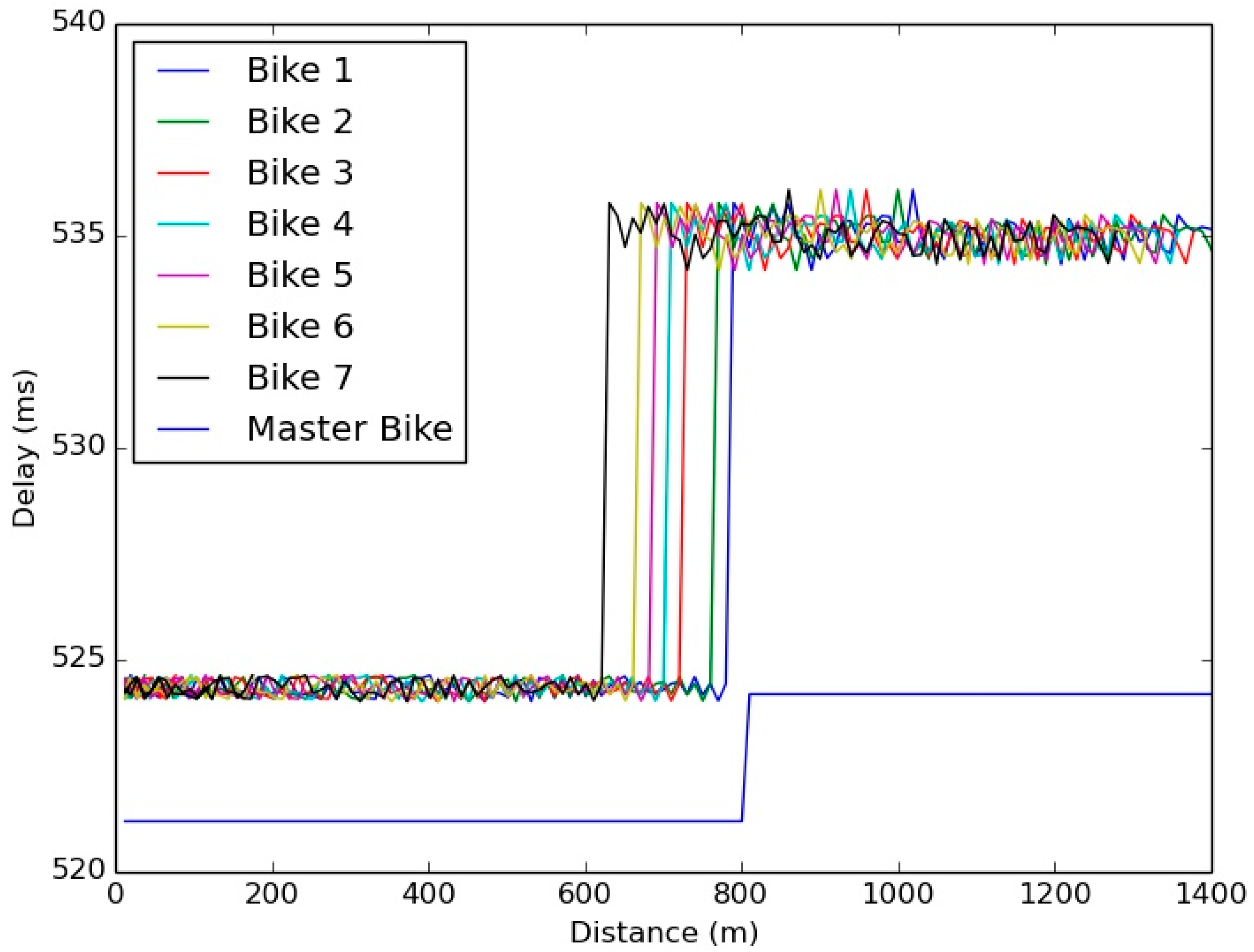
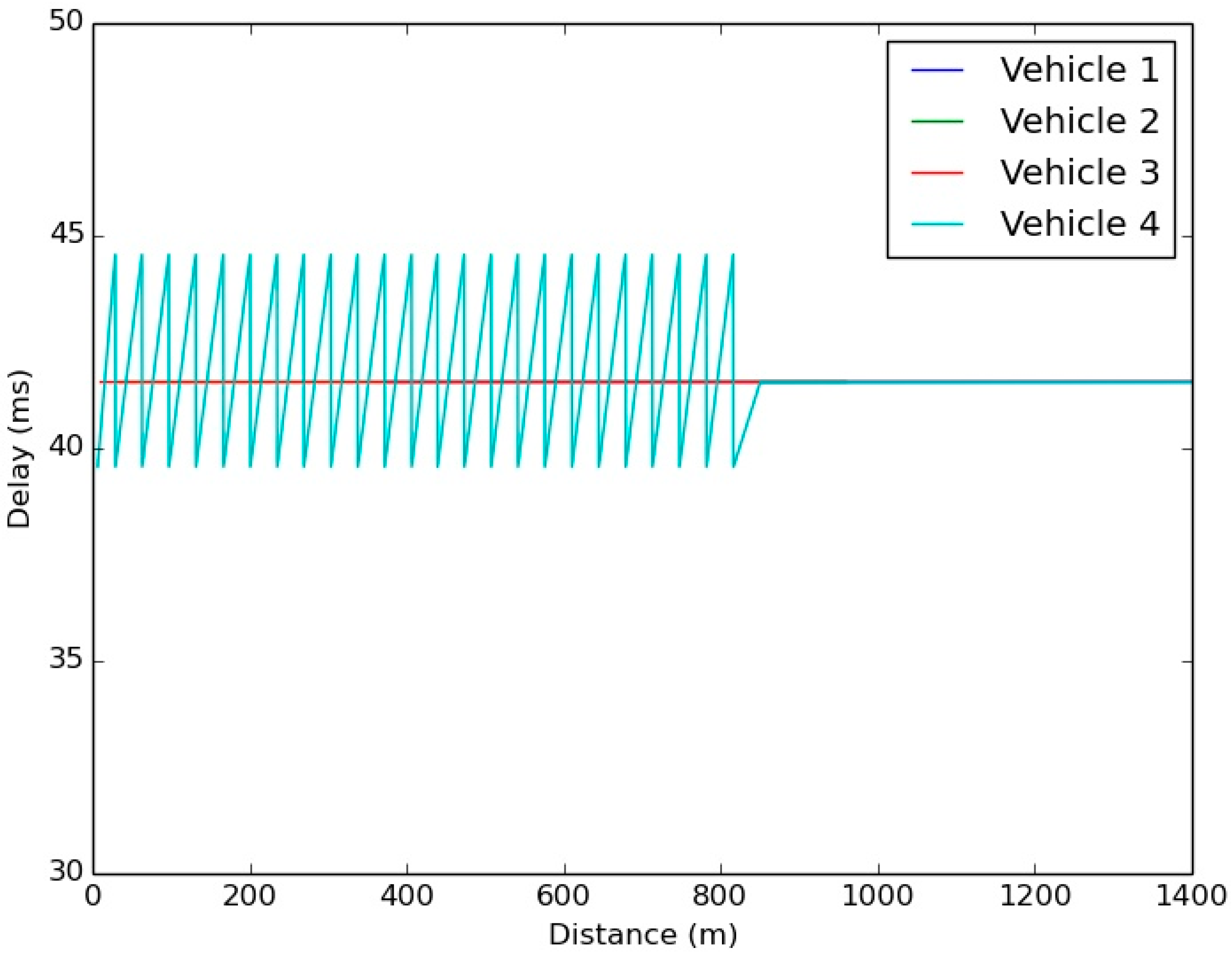
- Bike reception delay (ms): the time elapsed between the message transmission by a vehicle and the message reception for a given bike.
- Vehicle reception delay (ms): the time elapsed between the message transmission by the Master bike and the message reception for a given vehicle.
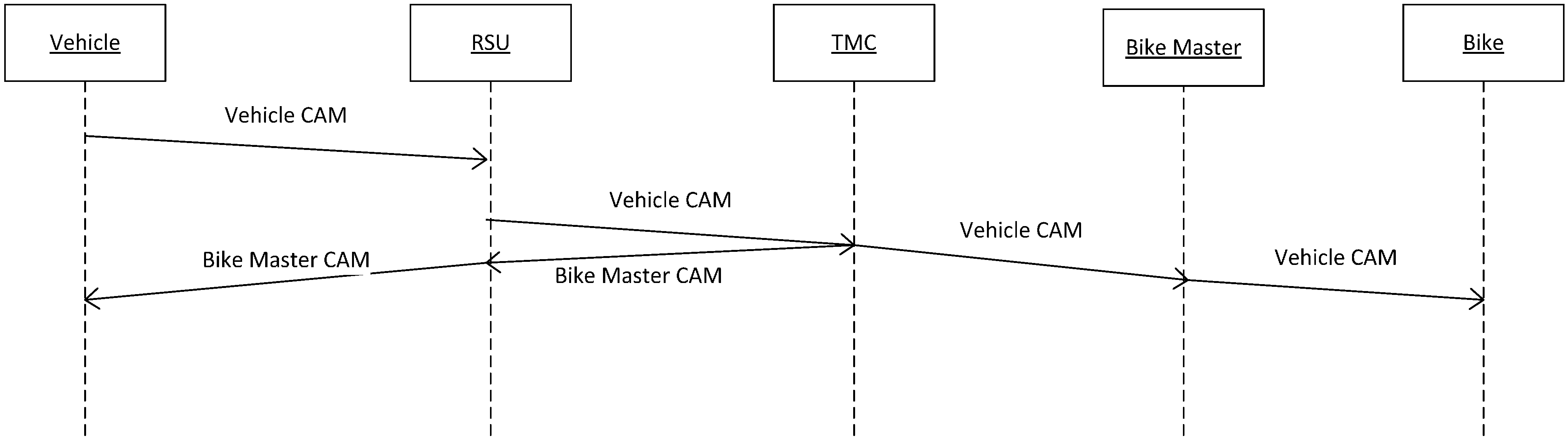
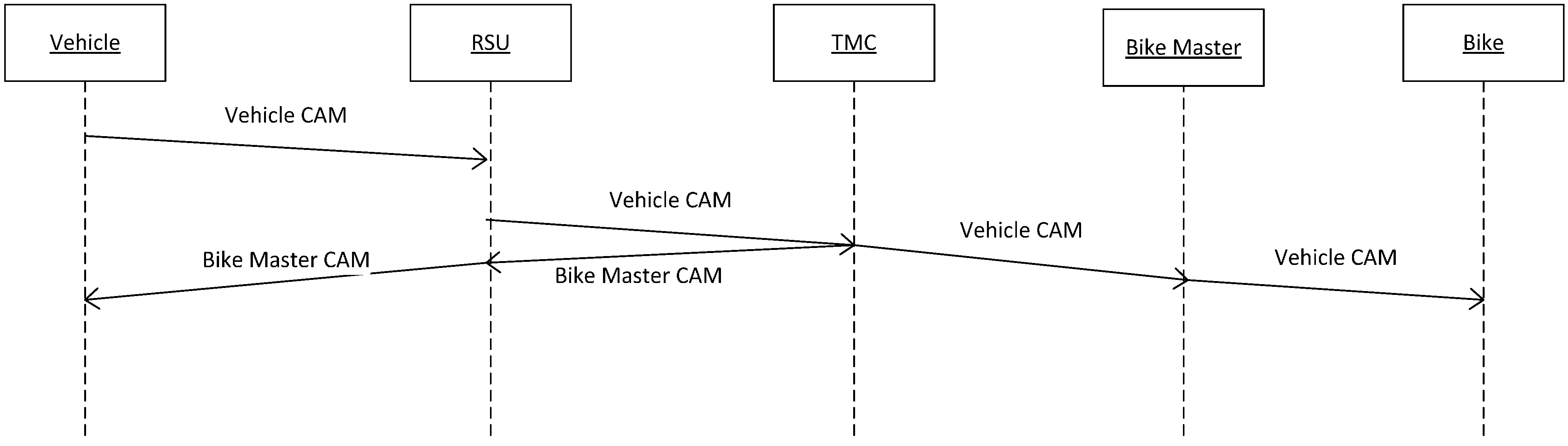
- DV-RSU is the time from the message being generated in the vehicle until the RSU receives the message.
- DRSU-TMC is the time that passes from when the RSU receives the message from the vehicle until it is received by the TMC.
- DTMC-BM is the time that passes from when the TMC receives the message from the RSU until it is received by the Master Bike.
- DBM-B is the time that passes from when the Master Bike receives the message from the TMC until it is received by the bikes that are in the Wi-Fi network.
- DBM-TMC is the time that passes from when the message is generated in the Master Bike until it is received by the TMC.
- DTMC-RSU is the time that passes from when the TMC receives the message of the Master Bike until it is received by the RSU.
- DRSU-V is the time that passes from when the RSU receives the message from the TMC until it is received by the vehicle.
4. Vulnerable Road User Application: Cyclist Warning System
4.1. System Overview
4.2. System Architecture
- (a)
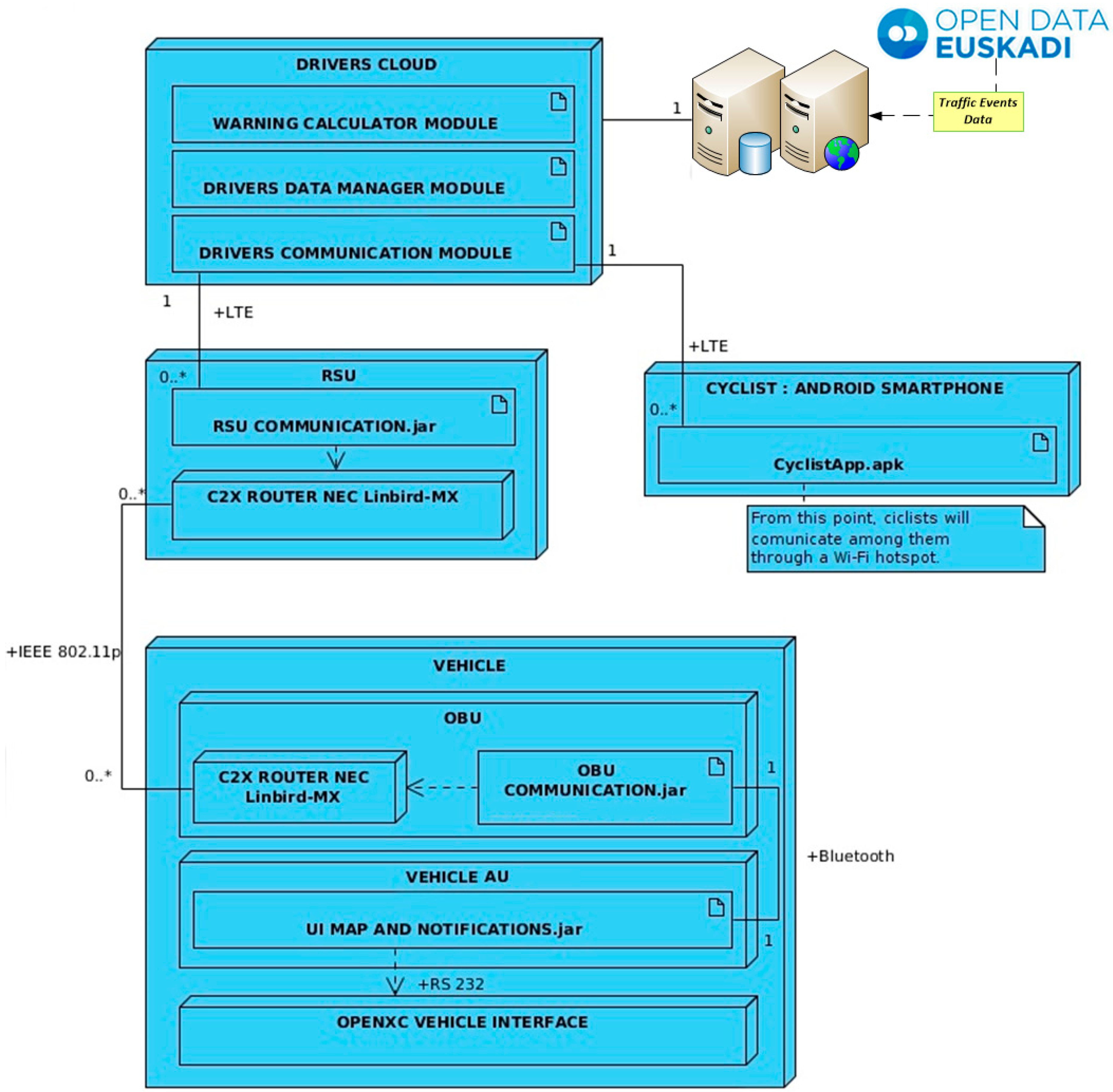
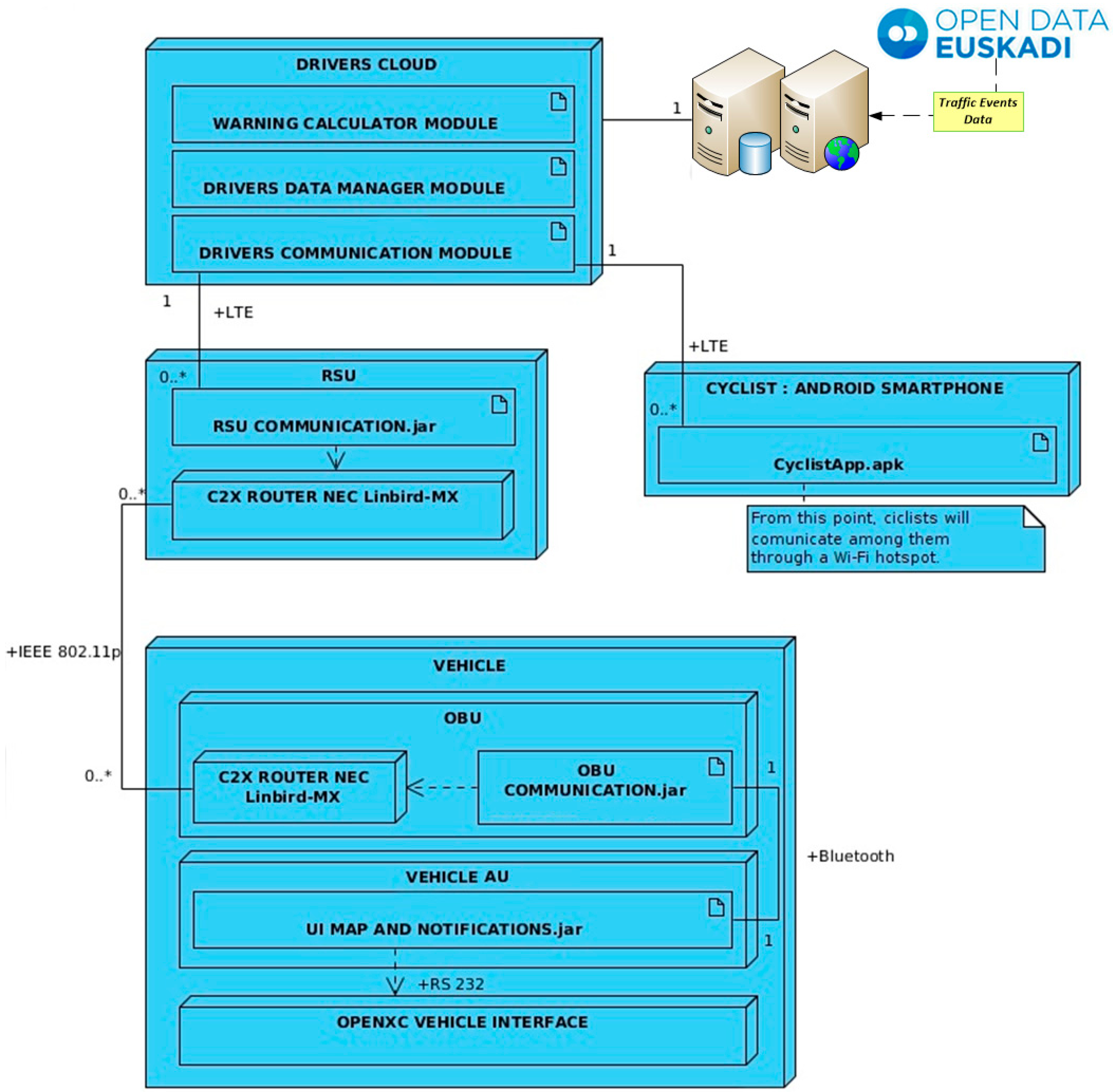
- In the case of cyclists, an Android application running in a smartphone has been developed. From this application, a register in the Drivers Cloud will be updated with the current position of a cyclist or a bunch of cyclists. All of them will receive data about the position of closing vehicles and/or other different events that can happen on the road (those that can be obtained from an open data base such as Open Data Euskadi). As it has been introduced before, V-Alert also has been designed to consider a bunch of cyclists that ride together on a route. In this case, a private Wi-Fi network is created among the cyclists where only one plays the role of leader and he is in charge of forwarding and receiving information to and from the Drivers Cloud.
- (b)
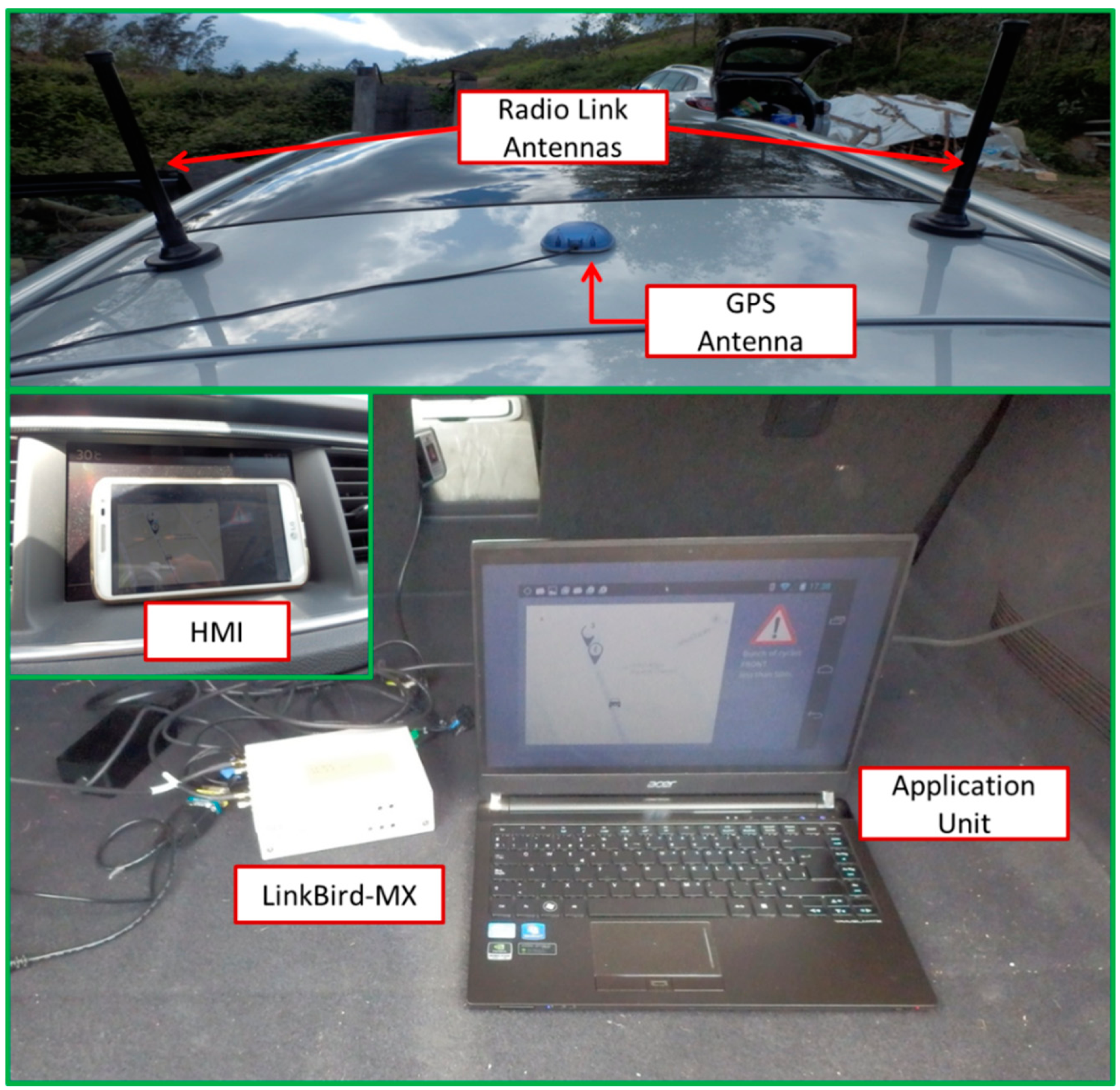
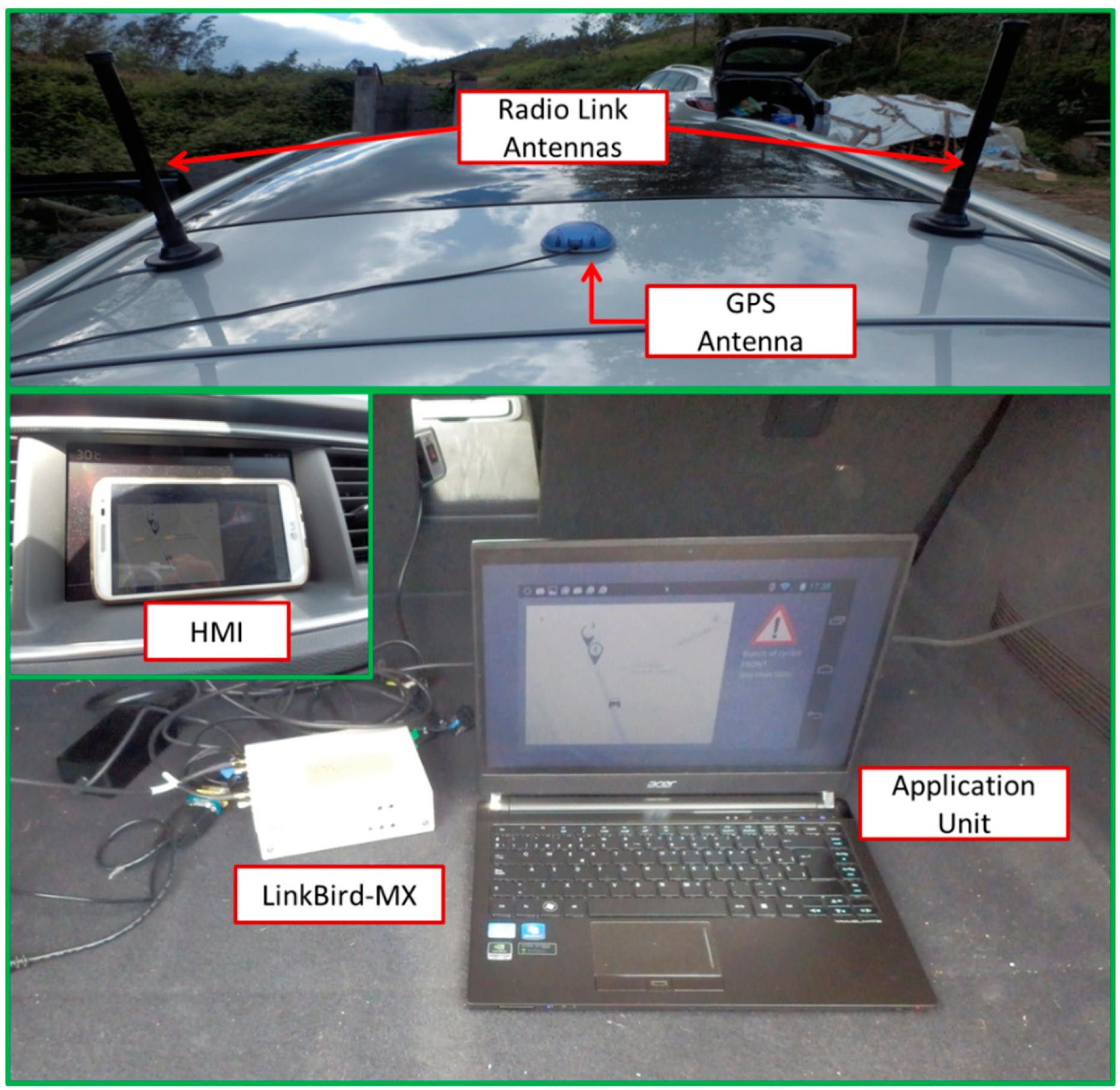
- Vehicles access the Drivers Cloud through the RSUs settled in the infrastructure. V-Alert is a centralized C-ITS system, where all the information is saved and processed at the Drivers Cloud and the RSU only acts as a communication gateway, deploying an IEEE 802.11p interface to communicate with the vehicles and a LTE interface to connect with the Drivers Cloud. On the vehicles, the OBU implements the communication with the RSU and also shows the messages received by the RSU in the HMI of the vehicle. As it is described in the next section, the OBU is also ready to collect information from the electronic systems of the vehicle through an OpenXC interface and from the GPS of the vehicle.
4.3. Drivers Cloud Server
- The Drivers Communication Module is in charge of listening to drivers’ position messages, filtering incorrect messages, and parsing and sending them to upper layers. It is composed of a Jetty-powered server which contains two controllers called handlers that process any message that is received by the server. Another handler is in charge of applying a defined message filtering policy in order to accept only POST messages and to reject those messages whose payload is wrong or corrupted. Messages are stored a maximum of two minutes in order to avoid memory overload.
- The Driver Data Manager is the module responsible for storing the messages that are accepted by the Drivers Communication Module, and making these data accessible to upper layers. When a message from a vehicle arrives to this layer, it is verified if a register of this vehicle already exists. If so, the register is updated with the newest information and if not, a new register is created. As it was mentioned before, in order to avoid the overload of redundant information, if a register of a vehicle is not updated in a certain amount of time and this vehicle has not produced a significant message, its register is deleted from the database. The registers of vehicles and cyclists that are stored in the server contain information about: an identifier of the device, its GPS position, heading, IP address, timestamp, and, in the case of being a bunch of cyclists, the number of cyclists in this position. This number is quite important in order to alert the vehicles about the size of the bunch and the area that they occupy on the road.
- The Warning Calculation Module is the core of the Drivers Cloud. This module compares data of both vehicles and cyclists for finding the distance between them. If one vehicle is closing in to a cyclist or bunch of cyclists, this module generates a high priority warning message that is broadcasted to the affected cyclists and vehicles.
4.4. Vehicle On-Board Unit and Road Side Unit Systems
| LinkBird-MX | Antenna | ||
|---|---|---|---|
| Parameter | Values | Parameter | Values |
| Frequency | 5725–5925 MHz | Model | ECO6-5500 |
| Bandwidth | 10 MHz | Frequency | 5.0–6.0 GHz |
| Tx Power | 21 dBm | Gain | 6 dBi |
| Bitrate | 3 Mbps | Radiation | Omni-directional |
| Message from the Bunch Leader to the Drivers Cloud | |||||||
|---|---|---|---|---|---|---|---|
| hwAddr | Latitude | Longitude | Alt. | Heading | Speed | Components | Timestamp |
| EA:22:FD:AA:DD | 43.2585269 | −2.9377635 | 8 | 67 | 5 | 5 | 2 February 2015 10:39:40.433 |
| Message from the Drivers Cloud to the Bunch Leader | |||||||
| DE:11:AE:DE:EE | 43.258146 | −2.937094 | 6 | 280 | 15 | – | 2 February 2015 10:39:38.581 |
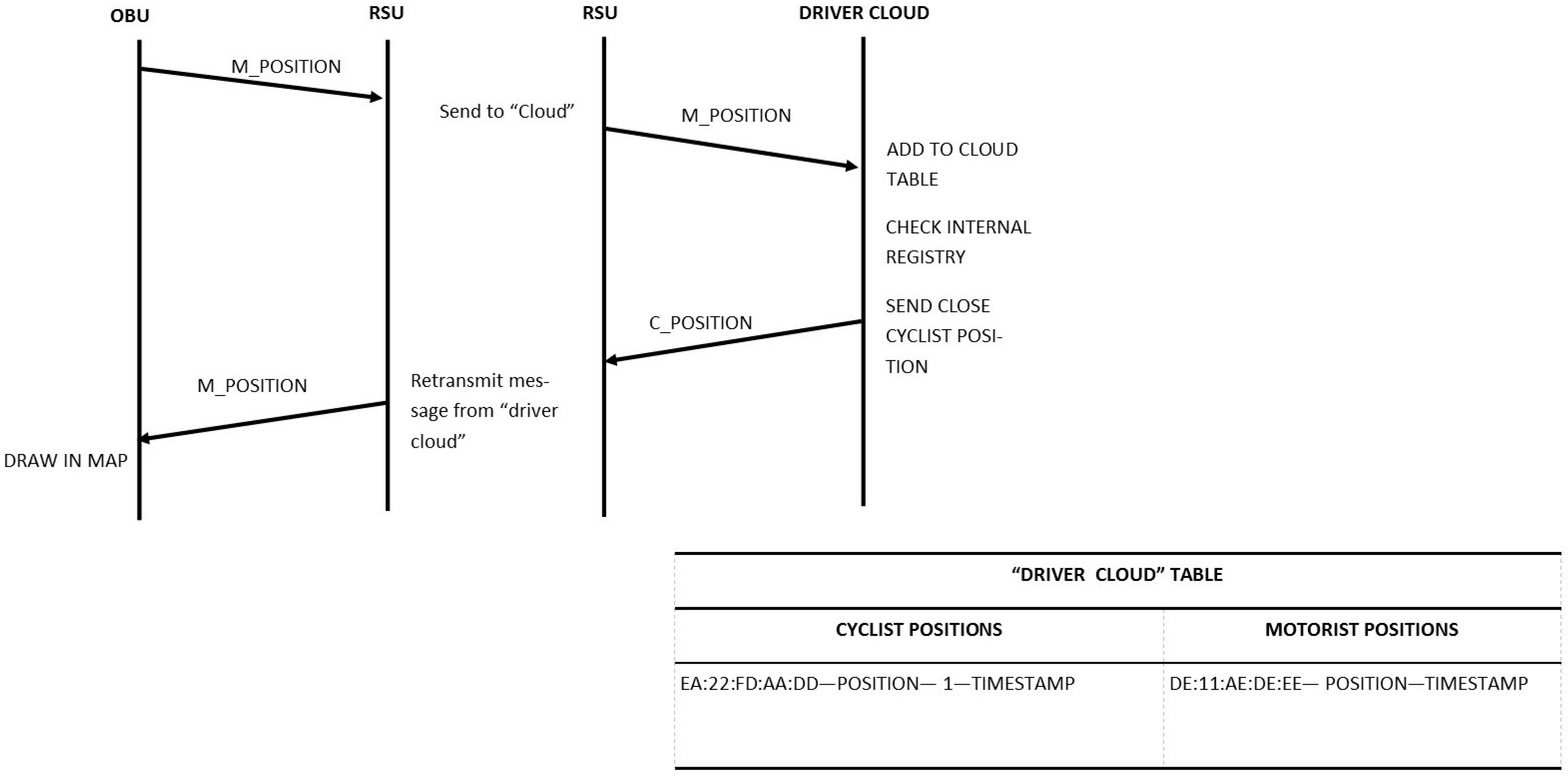
- Every 2 s, the geolocation of the vehicle is obtained thanks to a GPS module that is connected to the LinkBird-MX. Afterward, a message with this position is sent through a SHB (Single Hop Broadcast) message to the nearest RSU, which captures the message and addresses it to the Drivers Cloud.
- The LinkBird-MX module sends and receives AddressMessage messages from other OBUs and RSUs, and stores their locations in an inner table. These GPS positions can be used by the OBU to report georeferenced information to these other agents. This means that the developed application is also ready to work in a Vehicle-to-Vehicle scenario in which the RSU would not be required.
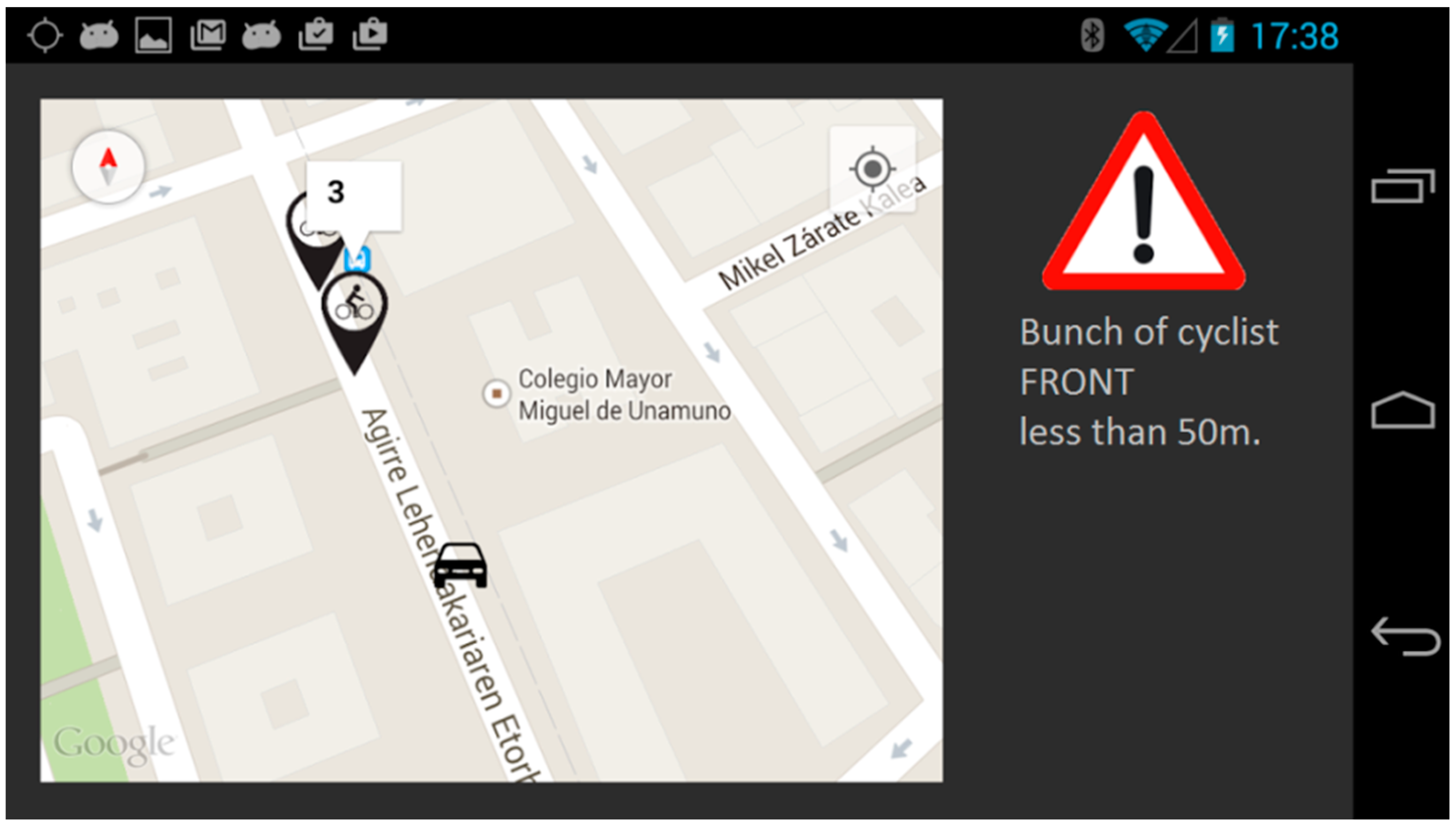
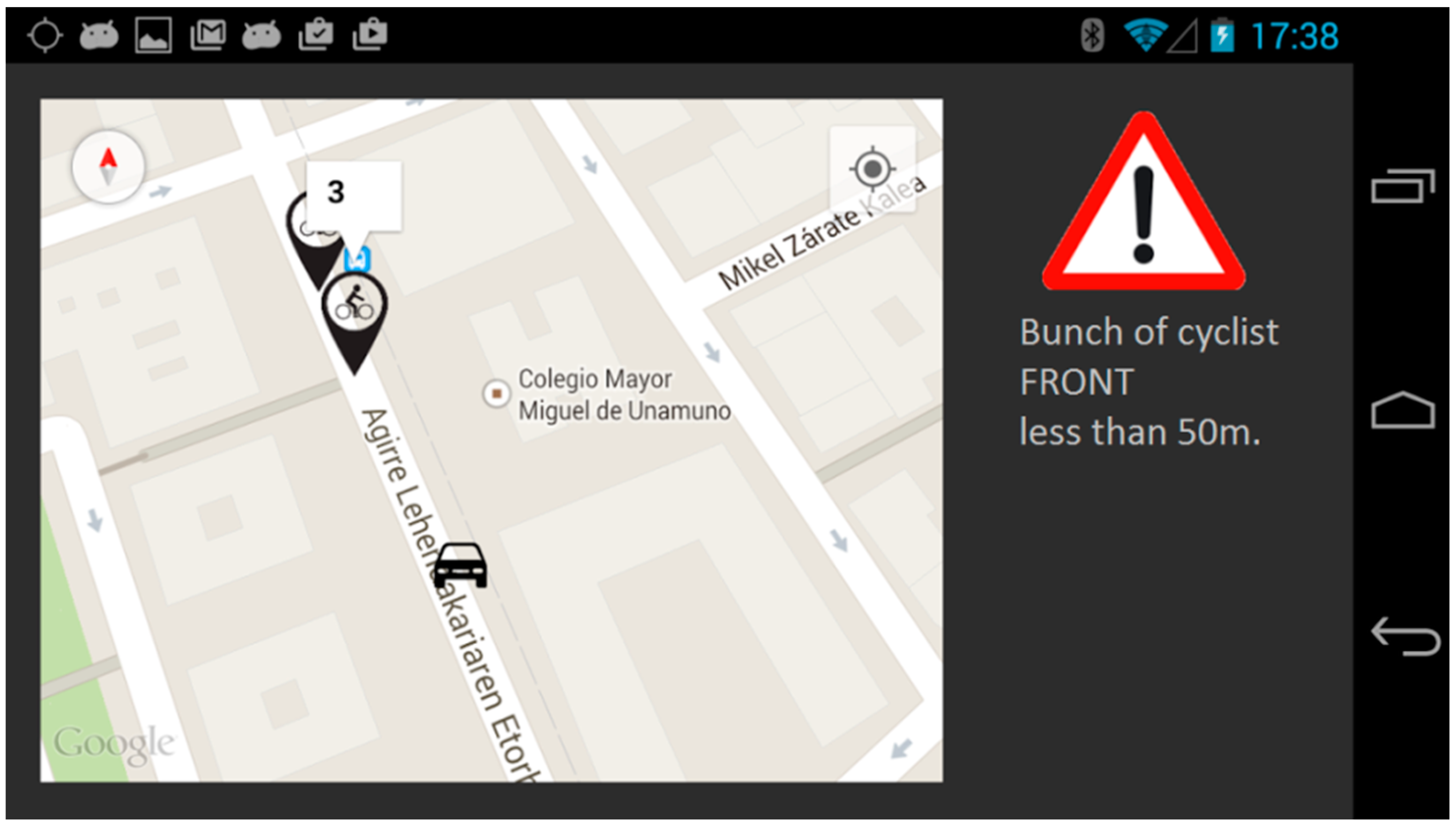
- On the AU, incoming messages are processed in the OBU communication application and shown to the driver through the HMI depending on their nature:
- Cyclists’ position: an icon is drawn on the map with information about their relative position with respect to the vehicle (front, left, right, or back), the number of cyclists in the group, and the remaining distance until crossing with them.
- Other notifications. The application shown in this paper is ready to report drivers’ information about events on the road. To feed the system, open data platforms with real-time information about the traffic can be used.
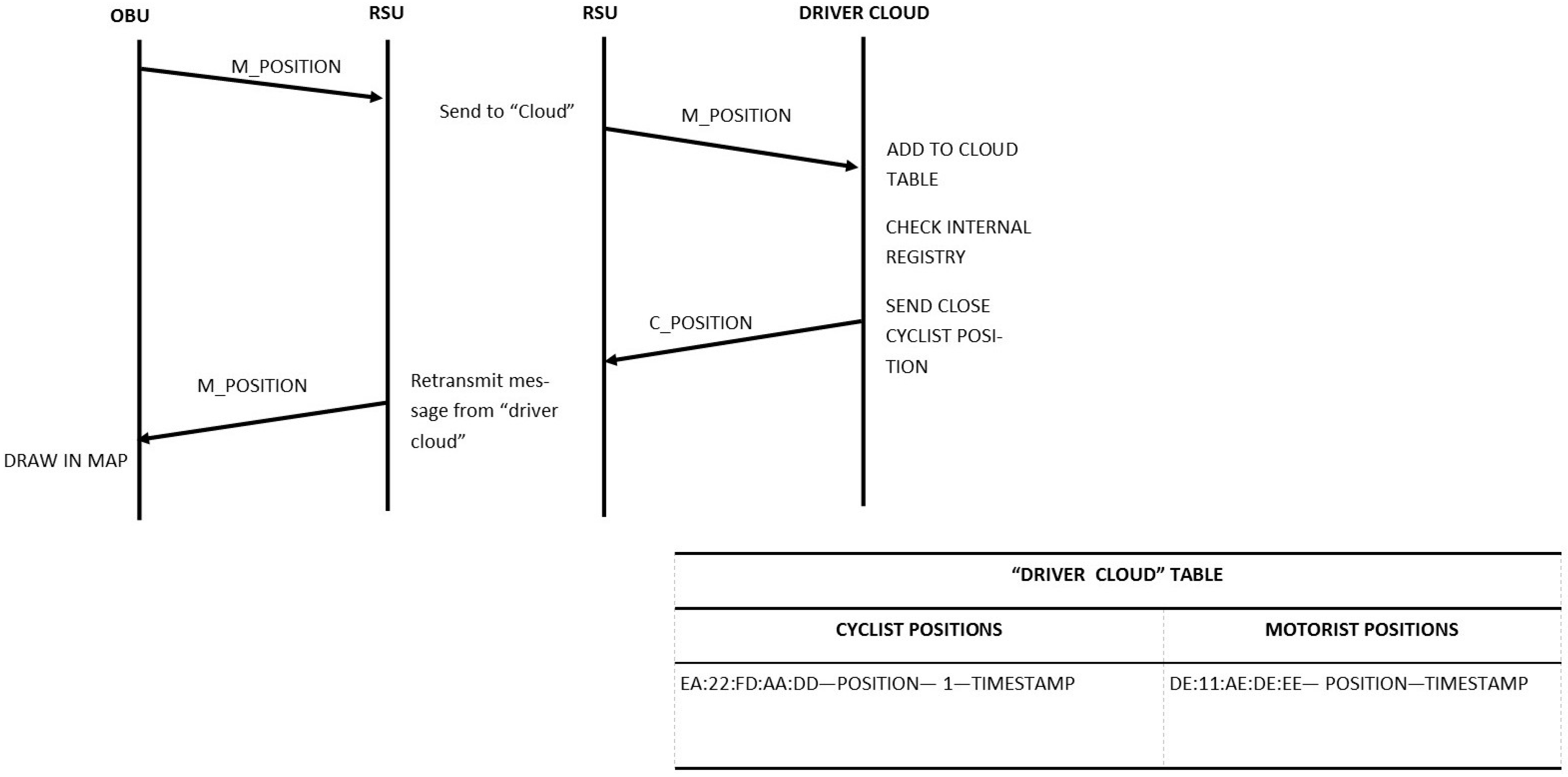
- The RSU receives messages from the OBU and addresses them to the Drivers Cloud: the RSU is constantly listening to messages, forwarding vehicles’ positions to the Drivers Cloud, and feeding the Warning Calculation Module to calculate the relative position of vehicles and cyclists.
- The RSU receives messages from the Drivers Cloud and addresses them to the OBU: when a message is sent from the Drivers Cloud, first the header is read and depending on the type of message, (1) it will be addressed to the OBUs that are in the covered area of the RSU; or (2) as if the RSU were connected to a variable signal panel, the RSU is also ready to interact with these kinds of systems that are already deployed on the infrastructure and are part of an Intelligent Transport System.
4.5. Cyclist Mobile Application
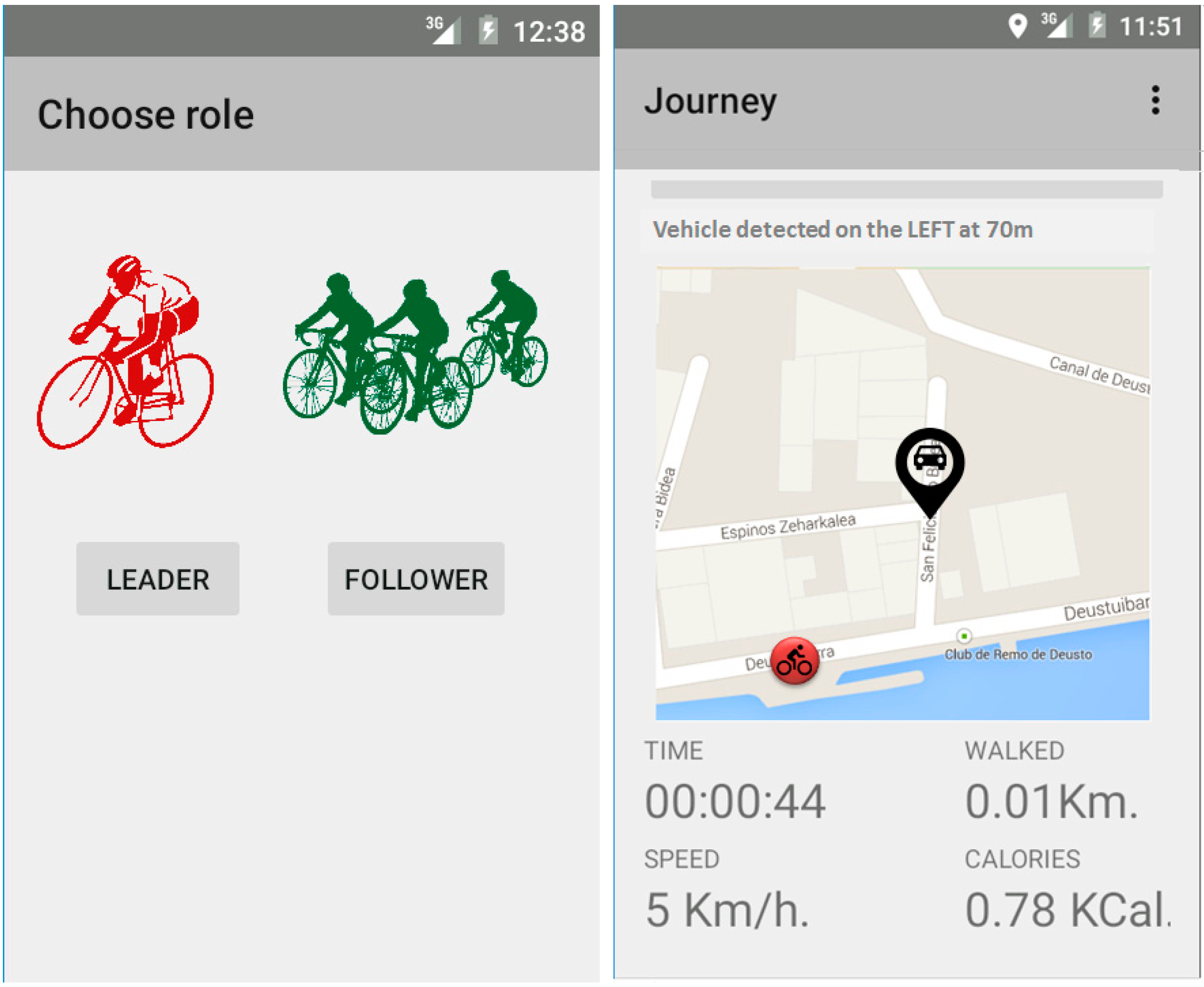
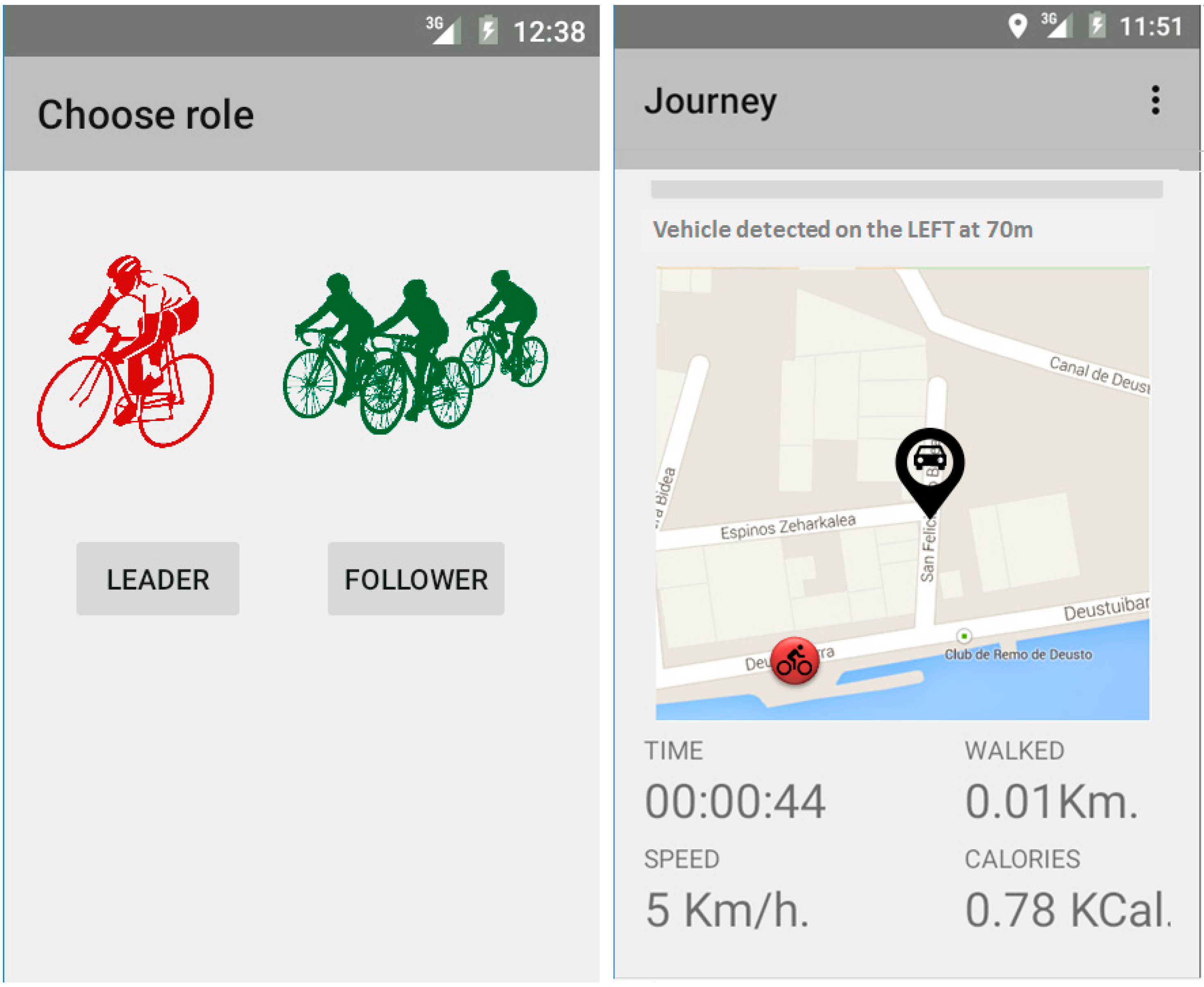
- Individual ride: the user sends messages with his or her position through HTTP1.1 to the Drivers Cloud. Messages coming from the Drivers Cloud will be sent through a socket by the 8080 port by default to the cyclist’s device (Figure 11).
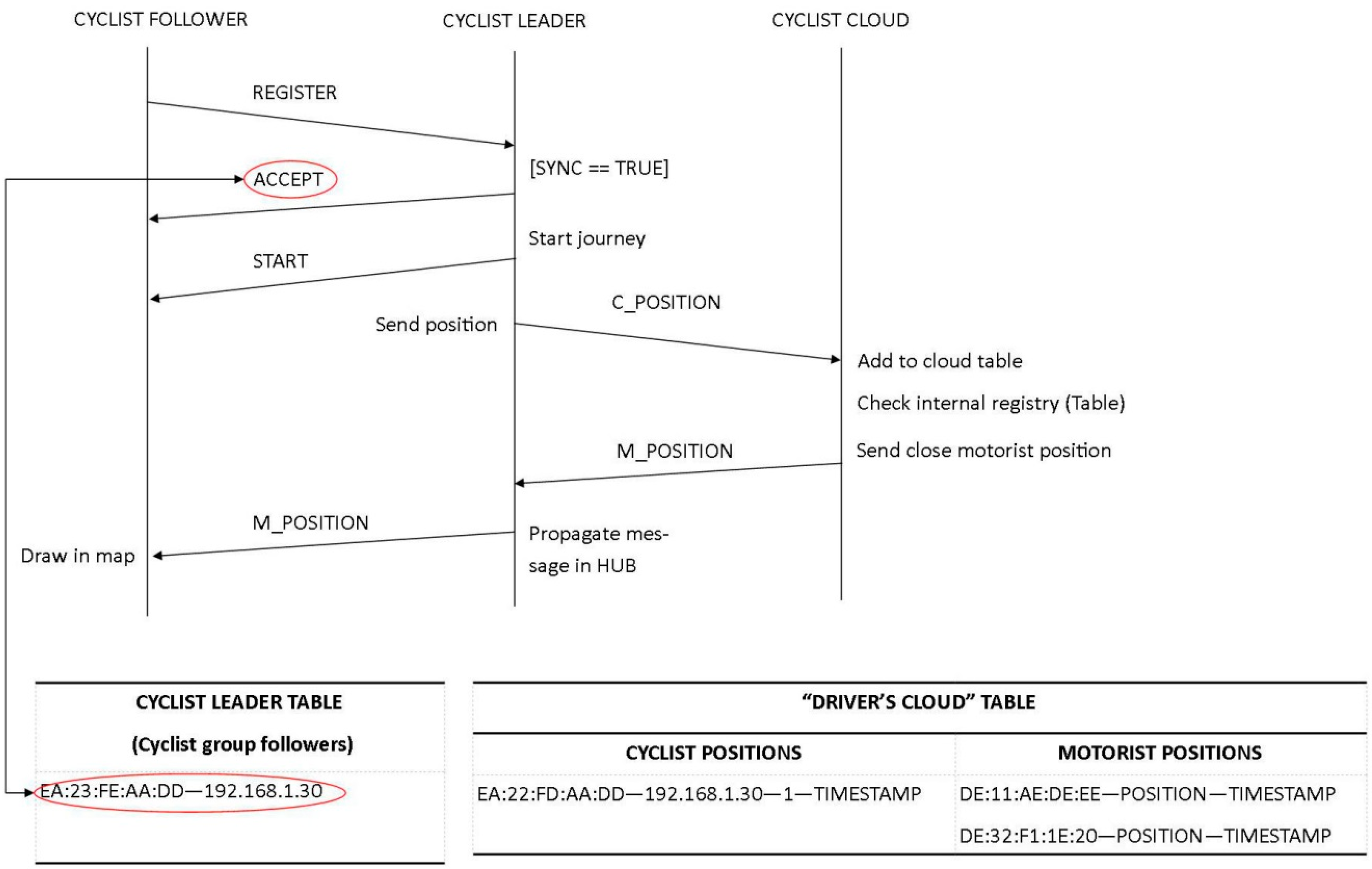
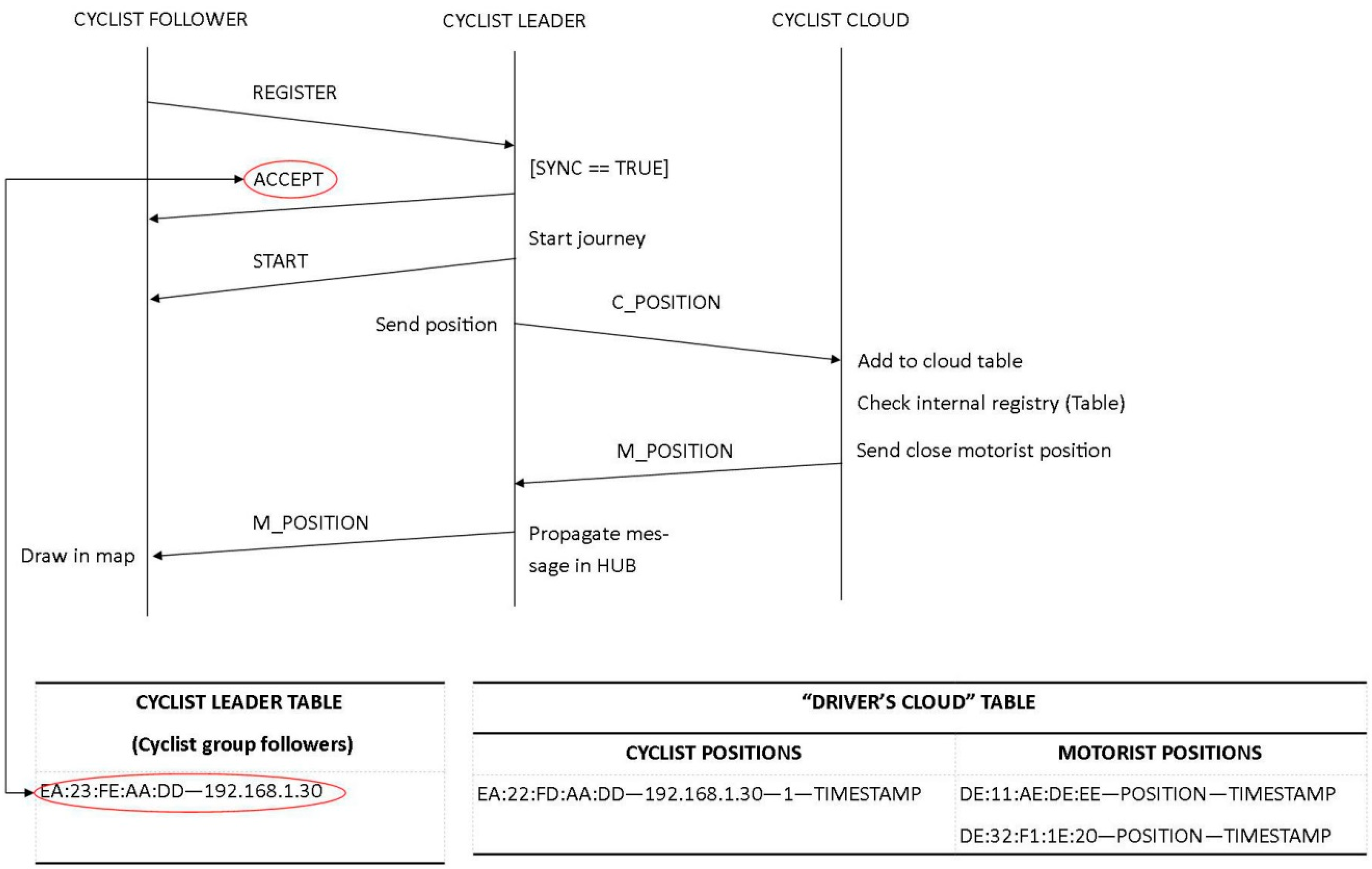
- Bunch ride: the leader of the bunch manages the messages coming from the Drivers Cloud. The other cyclists receive the positions and notifications from the leader thanks to the private Wi-Fi network that is setup at the beginning of the ride. First, the leader creates a virtual hub in which the other cyclists (that is, the followers) connect and communicate through a socket set up at port 1099 (Figure 11). When a device is trying to connect to the virtual hub, the follower sends a message asking the leader to get into the bunch. If the leader accepts the connection, a confirmation message is sent to the follower. Once all the cyclists’ devices are synchronized, the leader notifies the beginning of the ride. The leader’s device sends all data related to the bunch to the Drivers Cloud and it also receives and addresses the messages received from the cloud to the followers, who only listen to messages coming from the leader. In this first version of the application, if the leader leaves the group, the remaining cyclists have to reconfigure the application.
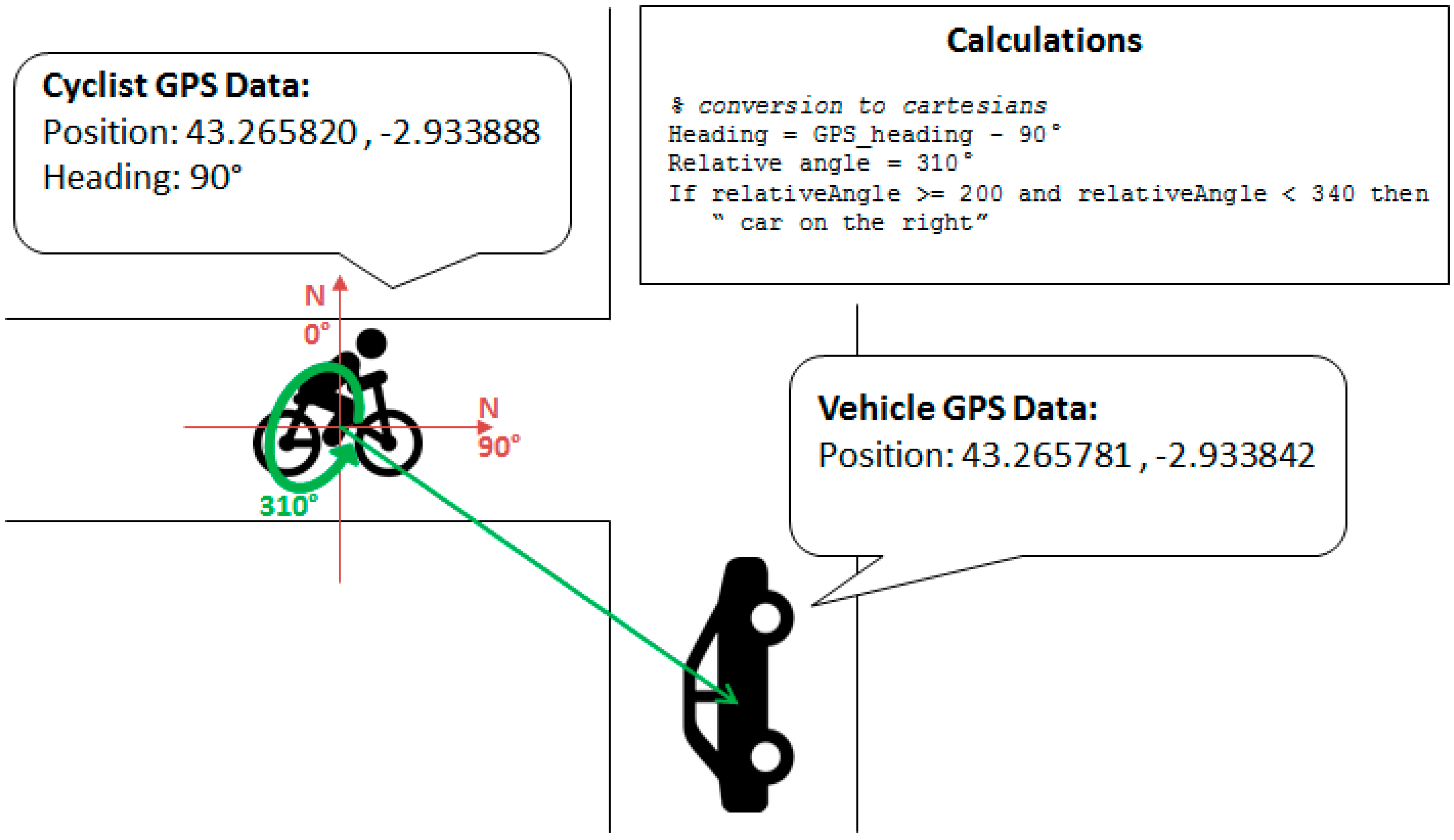
Relative Position Algorithm
| Algorithm 1 Relative position algorithm description |
Function getRelative VehicularPosition(headingA, gpsPosA, gpsPosB) Data: headingA, gpsPositionA, gpsPositionB Result: relative vehicular position begin heading ← heading – 90 correctAngle (heading) angle ← calculateAngleBetweenTwoVehicles (gpsPosA, gpsPosB) correctAngle (angle) relativeAngle ← relateAngles (heading, angle) correctAngle (relativeAngle) if relativeAngle is between 20 and 0 or 359 and 340 then return “FRONT” else if relativeAngle is between 140 and 200 then return “BACK” else if relativeAngle is between 21 and 140 then return “LEFT” else return “RIGHT” end end end |

5. V-Alert Validation in a Real Scenario

| Message N° | CyclistApp→DriversCloud | DriversCloud→RSU | RSU→Vehicle |
|---|---|---|---|
| 1 | 1.278 | 0.417 | 0.038 |
| 2 | 0.342 | 0.416 | 0.038 |
| 3 | 0.436 | 0.415 | 0.039 |
| 4 | 0.429 | 0.416 | 0.038 |
| 5 | 0.430 | 0.417 | 0.040 |
| 6 | 0.470 | 0.416 | 0.040 |
| 7 | 0.453 | 0.417 | 0.040 |
| 8 | 0.401 | 0.418 | 0.043 |
| 9 | 0.399 | 0.417 | 0.045 |
| 10 | 0.855 | 0.416 | 0.043 |
| Average | 0.549 | 0.4165 | 0.0404 |
6. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Road Safety in the European Union. In Trends, Statistics and Main Challenges; European Commission, Mobility and Transport DG: Brussels, Belgium, 2015.
- Road Safety Vademecum. In Road Safety Trends, Statistics and Challenges in the EU 2010–2013; European Commission: Brussels, Belgium, 2014.
- CAR 2 CAR Communications Consortium. Roadmap between Automotive Industry and Infrastructure Organizations on Initial Deployment of Cooperative ITS in Europe; CAR 2 CAR Communications Consortium: Braunschweig, Germany, 2012. [Google Scholar]
- Amsterdam Group. Cooperative ITS Corridor Joint Deployment; Amsterdam Group: Amsterdam, The Netherlands, 2013. [Google Scholar]
- ETSI (2009-06). Intelligent Transport Systems (ITS) and Vehicular communications and Basic set of applications and Definitions; ETSI TR 102 638 V1.1.1; European Telecommunications Standards Institute: Sophia Antipolis Cedex, France, 2009. [Google Scholar]
- Takahashi, T.; Hyung, K.K.; Kamijo, S. Urban road user classification framework using local feature descriptors and HMM. In Proceedings of the 15th International IEEE Conference on Intelligent Transportation Systems (ITSC), Las Palmas de Gran Canaria, Spain, 16–19 September 2012; pp. 67–72.
- Fardi, B.; Neubert, U.; Giesecke, N.; Lietz, H.; Wanielik, G. A fusion concept of video and communication data for VRU recognition. In Proceedings of the 11th International Conference on Information Fusion, Cologne, Germany, 30 June–3 July 2008; pp. 1–8.
- Heuel, S.; Rohling, H. Pedestrian classification in automotive radar systems. In Proceedings of the 13th International Radar Symposium (IRS), Warsaw, Poland, 23–25 May 2012; pp. 39–44.
- Schaffer, B.; Kalverkamp, G.; Biebl, E. A 5.8 GHz Cooperative Transponder System for Localization and Communication in Traffic Safety Applications. In Proceedings of the 78th Vehicular Technology Conference (VTC Fall), Las Vegas, NV, USA, 2–5 September 2013; pp. 1–5.
- Anaya, J.J.; Merdrignac, P.; Shagdar, O.; Nashashibi, F.; Naranjo, J.E. Vehicle to pedestrian communications for protection of vulnerable road users. In Proceedings of the IEEE Intelligent Vehicles Symposium, Dearborn, MI, USA, 8–11 June 2014; pp. 1037–1042.
- Dhondge, K.; Song, S.; Choi, B.; Park, H. WiFiHonk: Smartphone-Based Beacon Stuffed WiFi Car2X-Communication System for Vulnerable Road User Safety. In Proceedings of the IEEE 79th Vehicular Technology Conference (VTC Spring), Seoul, Korea, 18–21 May 2014; pp. 1–5.
- Dozza, M.; Idegren, M.; Andersson, T.; Fernandez, A. Platform enabling intelligent safety applications for vulnerable road users. Intell. Transp. Syst. 2014, 8, 368–376. [Google Scholar] [CrossRef]
- Zeeshan, H.M.; Fethi, F. LTE and IEEE 802.11p for vehicular networking: A performance evaluation. EURASIP J. Wirel. Commun. Netw. 2014. [Google Scholar] [CrossRef]
- Henderson, T.R.; Lacage, M.; Riley, G.F.; Dowell, C.; Kopena, J.B. Network simulations with the ns-3 simulator. In Proceedings of the SIGCOMM Demonstration, Seattle, WA, USA, 17–22 August 2008.
- Behrisch, M.; Bieker, L.; Erdmann, J.; Krajzewicz, D. Sumo-simulation of urban mobility-an overview. In Proceedings of the Third International Conference on Advances in System Simulation, Barcelona, Spain, 23–29 October 2011; pp. 55–60.
- Ministerio de Fomento-Gobierno de España. Instrucciones de Construcción. Instrucción de Carreteras Norma 3.1-IC.1999. Available online: http://www.fomento.gob.es/ (accessed on 27 July 2015).
- McGehee, D.V.; Elizabeth, N.M.; Scott, G.H.B. Driver Reaction Time in Crash Avoidance Research: Validation of A Driving Simulator Study on A Test Track. In Proceedings of the IEA/HFES Congress, San Diego, CA, USA, 30 July 2000.
- Bai, F.; Krishnan, H. Reliability analysis of dsrc wireless communication for vehicle safety applications. In Proceedings of the IEEE Intelligent Transportation Systems Conference (ITSC ’06), Toronto, ON, Canada, 17–20 September 2006; pp. 355–362.
- Hwang, J.; Yun, H.; Suh, Y.; Cho, J.; Lee, D. Development of an RTK-GPS Positioning Application with an Improved Position Error Model for Smartphones. Sensors 2012, 12, 12988–13001. [Google Scholar] [CrossRef] [PubMed]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hernandez-Jayo, U.; De-la-Iglesia, I.; Perez, J. V-Alert: Description and Validation of a Vulnerable Road User Alert System in the Framework of a Smart City. Sensors 2015, 15, 18480-18505. https://doi.org/10.3390/s150818480
Hernandez-Jayo U, De-la-Iglesia I, Perez J. V-Alert: Description and Validation of a Vulnerable Road User Alert System in the Framework of a Smart City. Sensors. 2015; 15(8):18480-18505. https://doi.org/10.3390/s150818480
Chicago/Turabian StyleHernandez-Jayo, Unai, Idoia De-la-Iglesia, and Jagoba Perez. 2015. "V-Alert: Description and Validation of a Vulnerable Road User Alert System in the Framework of a Smart City" Sensors 15, no. 8: 18480-18505. https://doi.org/10.3390/s150818480
APA StyleHernandez-Jayo, U., De-la-Iglesia, I., & Perez, J. (2015). V-Alert: Description and Validation of a Vulnerable Road User Alert System in the Framework of a Smart City. Sensors, 15(8), 18480-18505. https://doi.org/10.3390/s150818480