1. Introduction
Accurate tracking of the human’s pose is important in augmented reality applications such as entertainment, military training and medical navigation. A number of motion tracking technologies have been developed based on acoustic, mechanical, electromagnetic, optical and inertial sensors [
1,
2,
3,
4]. Acoustic systems use either time-of-flight and triangulation or phase-coherence to capture the marker position, but the performance of such devices is seriously affected by the directionality between the transmitters and the receivers. In a mechanical motion tracking system, the ground-based system can only track one rigid body over a small range of motion that is limited by the mechanical structure. An electromagnetic (EM) tracking system tracks the pose of the receiver coil with respect to the EM field generator, which makes the tracking performance suffer from magnetic field distortions when there are ferromagnetic materials in the working volume [
5,
6]. Optical tracking has been proven to be a reliable and accurate way to capture the pose of a human, but the dependence on markers and cameras makes it only applicable in structured environments and it suffers from occlusion [
7]. An inertial tracking system consists of gyros, accelerometers and magnetometers, but is unreliable to track position for long periods of time due to problems with sensor bias and drift [
8].
The use of sensor fusion technology is a common approach to compensate the drawbacks of individual tracking methods. The high accuracy of an optical tracking system (OTS) can assist the inertial sensors to remove the bias while the inertial tracking system can improve the robustness of tracking systems by capturing the orientation or position when some of the markers are not visible. Thus, hybrid tracking systems have been developed to take advantage of the complementary benefits of inertial and optical tracking systems. In [
9], a hybrid inertial sensor-based indoor pedestrian dead reckoning system aided by computer vision-derived position measurements is proposed. A similar system in [
10] consists of a camera and infrared LEDs installed with an inertial measurement unit (IMU) on two shoes to correct inter-shoe position error. In [
11], a multi-camera vision system is integrated with a strapdown inertial navigation system to track a hand-held moving device. In most of the existing literatures on tracking technology, variations of a Kalman Filter [
12], such as an Extended Kalman Filter (EKF) and Unscented Kalman Filter (UKF), are widely used [
5,
13,
14,
15,
16,
17] to improve the tracking accuracy and robustness. However, line-of-sight is required when the OTS is used to track the motion or improve the tracking performance. When marker occlusion occurs, the absence of vision data, which is widely used as the measurement in Kalman Filter implementations, will result in the failure of position and orientation tracking.
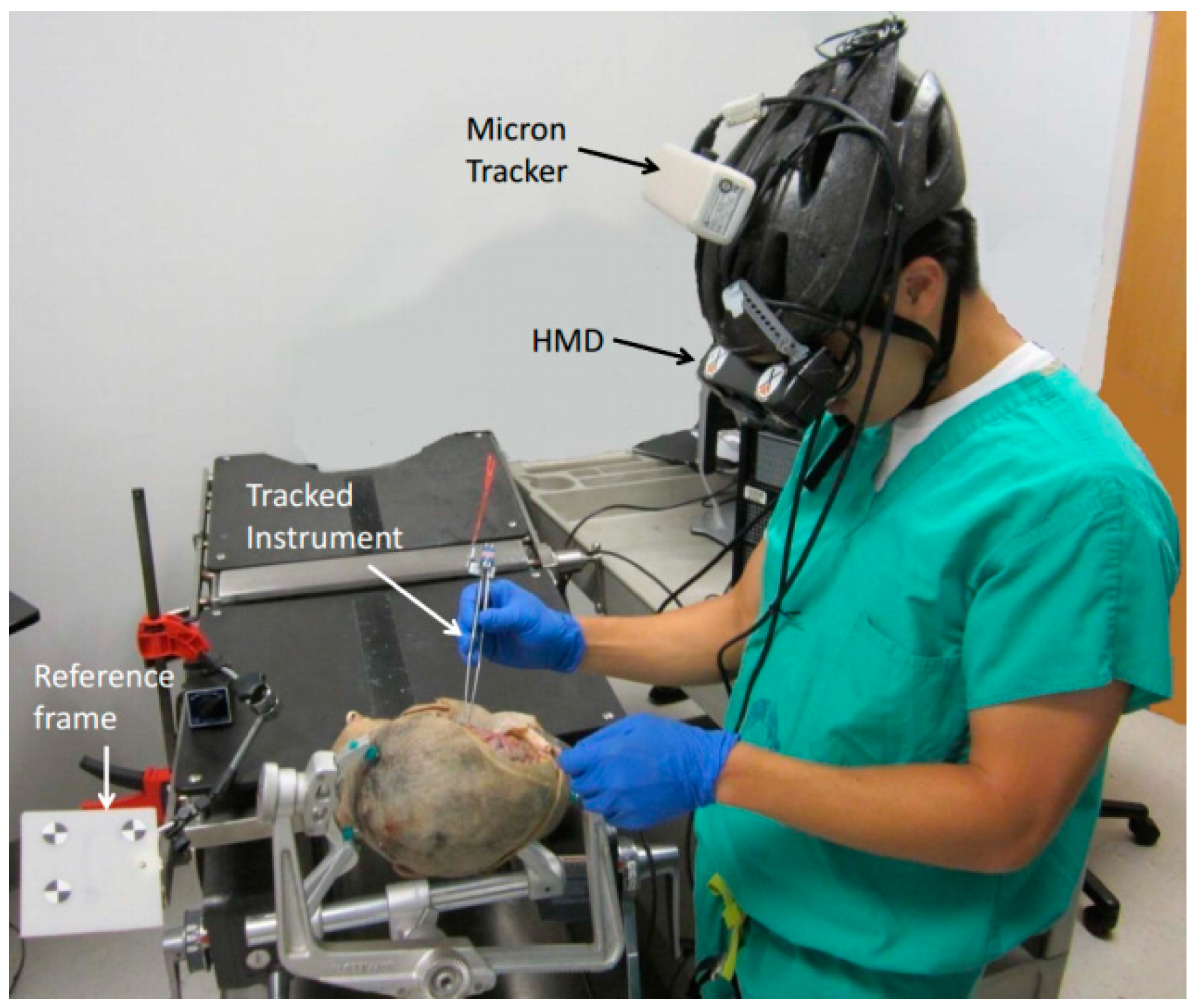
In our previous work [
18,
19], we proposed a head-mounted optical tracking system for a surgical navigation application, as shown in
Figure 1. Optical tracking provides drift-free measurement of position and orientation, but is subject to a line-of-sight constraint and suffers from slower update rates and higher latency [
20]. In contrast, inertial sensing, which includes gyroscopes, accelerometers, and magnetometers, provides low latency and high frequency measurement, but these sensors either provide derivatives of position/orientation and are subject to drift, or provide absolute orientation but are subject to bias (e.g., magnetometer) [
4,
15]. In [
21], the authors propose fusion of OTS and IMU measurements to estimate position and orientation in cases of brief occlusions of tracking markers, but only the accelerometer bias is estimated in the EKF. However, in long-term use of the IMU, the accuracy of orientation tracking will be influenced by the biases in the gyroscope and magnetometer. So, in [
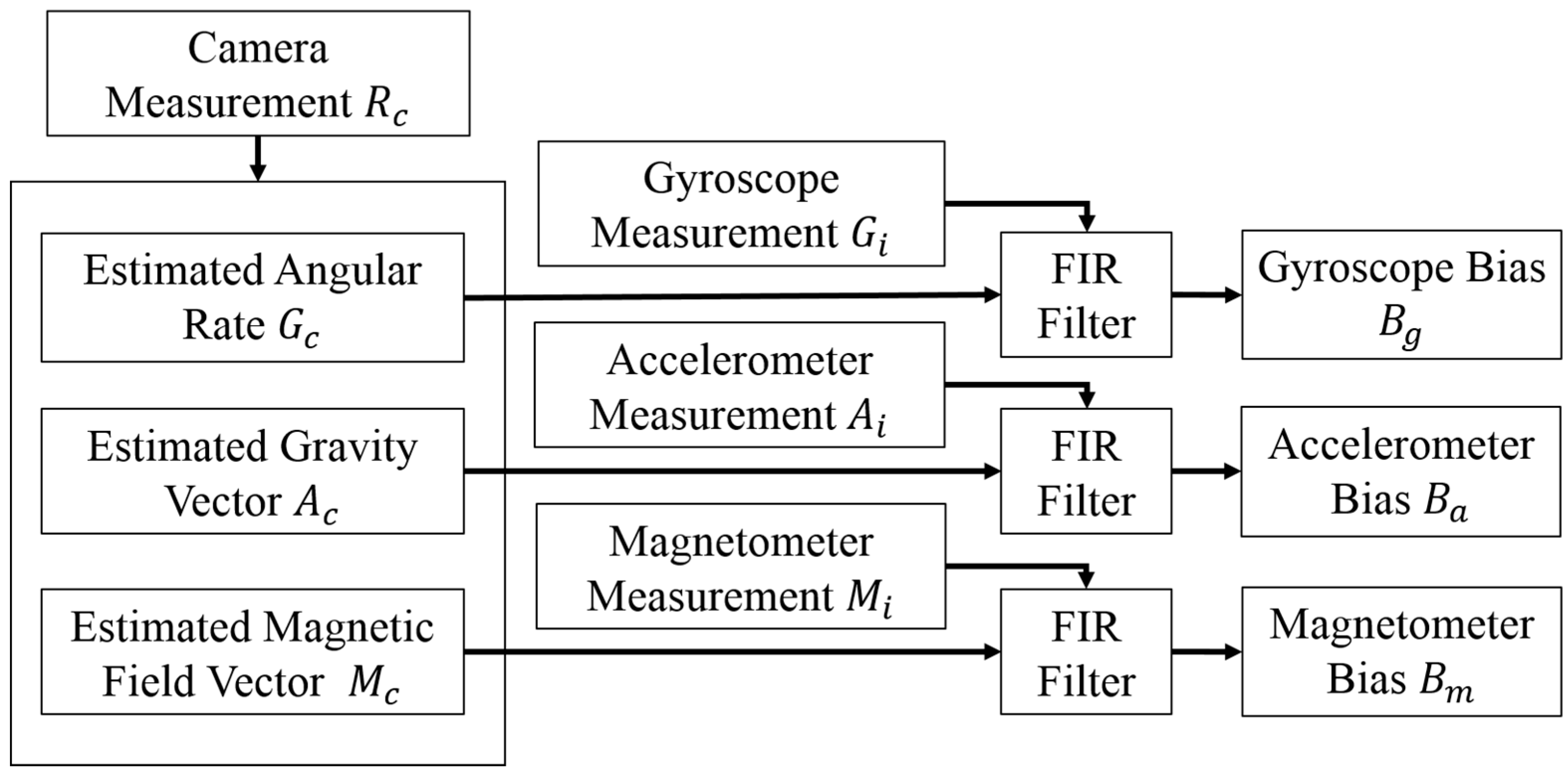
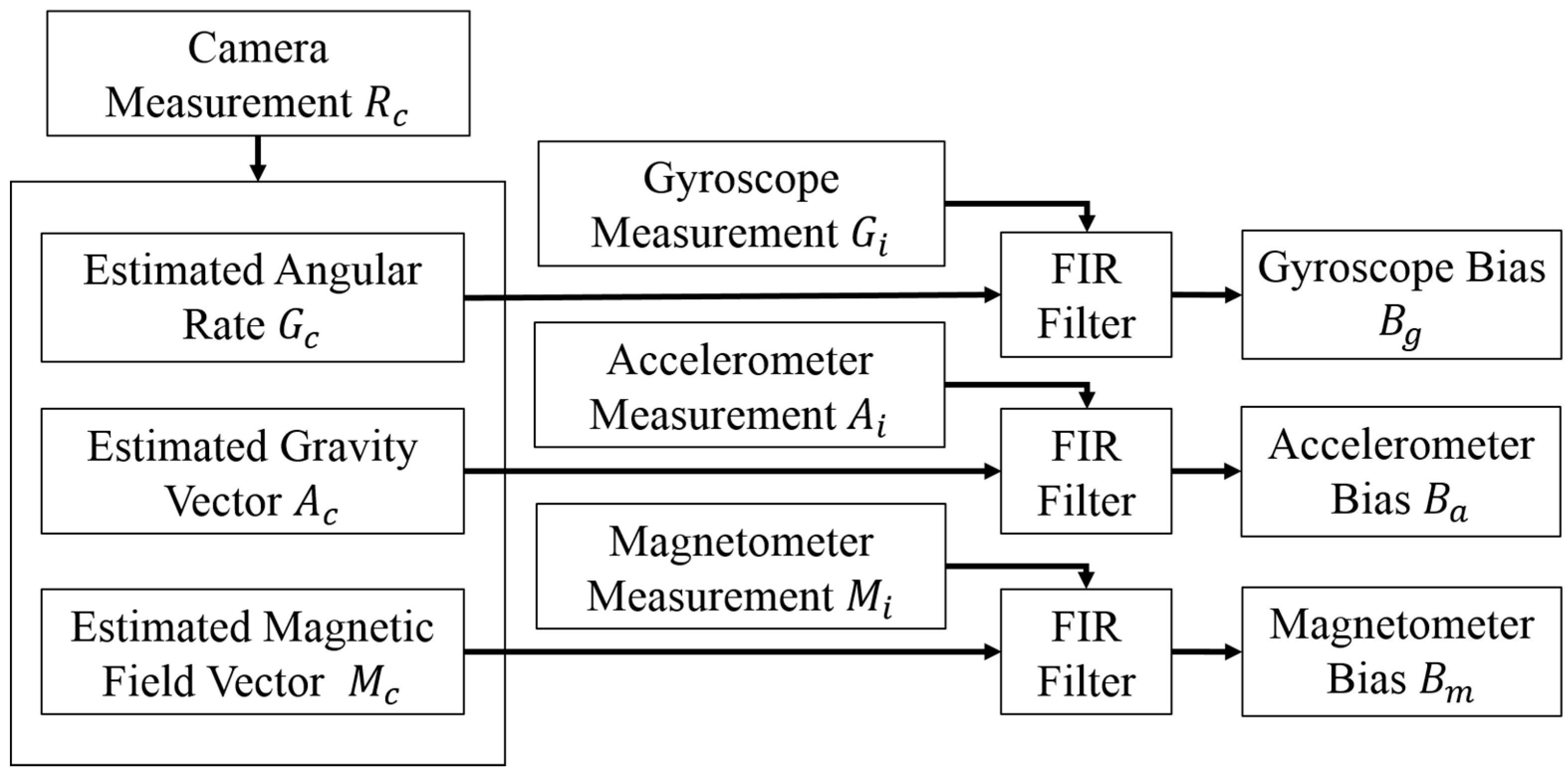
22] we proposed a sensor fusion approach where the 9-axial measurement from the IMU is bias-corrected by an OTS and used to track the orientation.
Figure 1.
Cadaver experiment with head mounted tracking system and display.
Figure 1.
Cadaver experiment with head mounted tracking system and display.
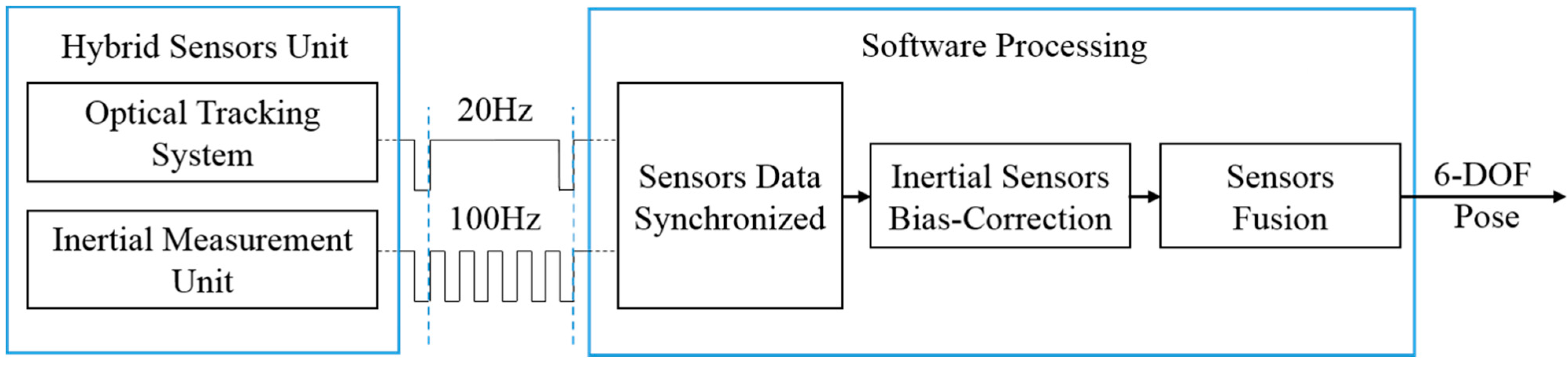
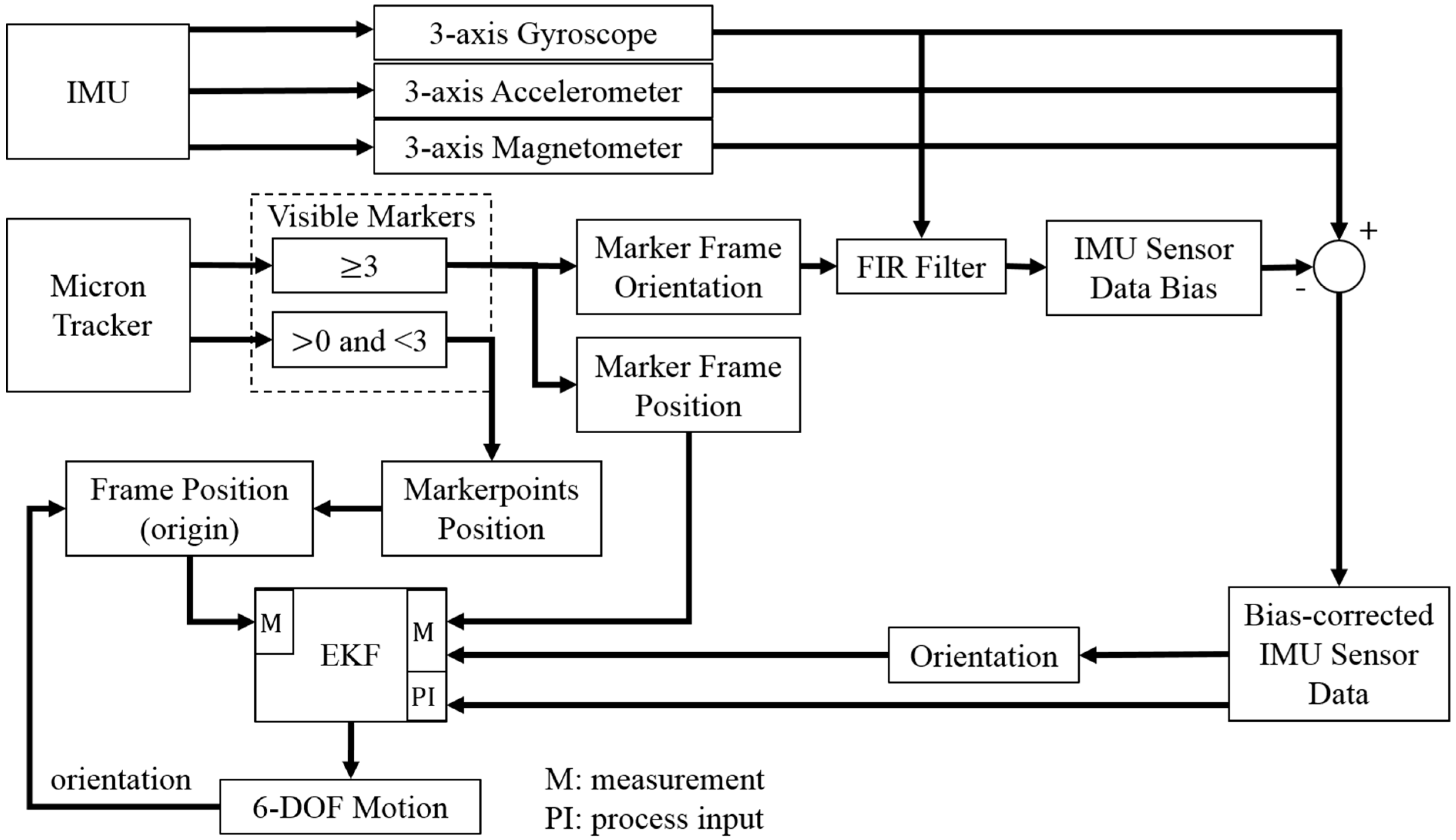
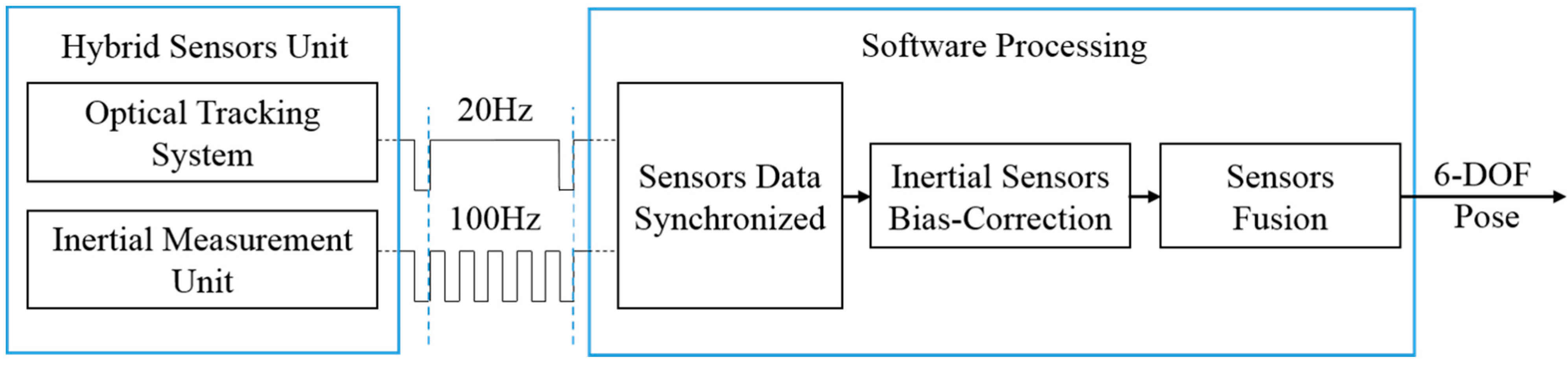
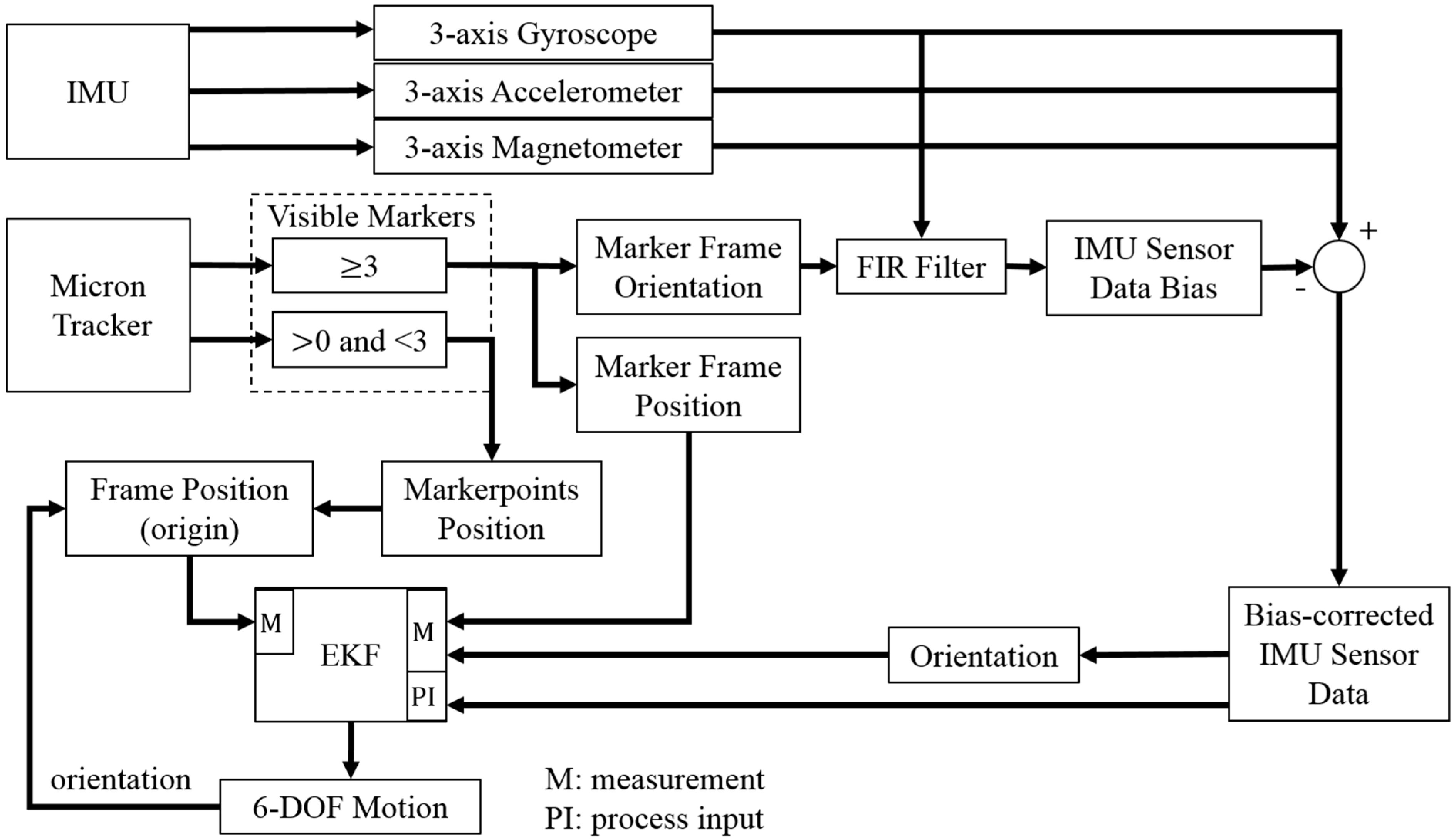
In this paper, to reduce the drift error caused by the bias of the inertial sensors and improve the accuracy of 6 degree-of-freedom (DOF) pose tracking, an error model is defined with: the bias errors which are corrected following the bias-correction approach in [
22]; and process and measurement noises of the sensor fusion EKF. The camera orientation is used to estimate the bias of the inertial sensors when the full marker frame is visible. Then, an EKF is implemented to estimate the orientation and position with the bias-corrected inertial sensor data as the system state driver and the OTS as part of the measurement when at least one marker is visible. The other part of the measurement is always the orientation from the IMU. Additionally, even when the OTS is capable to track the position, the acceleration measured by the IMU is used to help the hybrid tracking system (HTS) to provide a position tracking result at a higher updating rate.
This paper is organized as follows:
Section 2 describes the hybrid tracking system, the error model used to correct the inertial sensor data, and the sensor fusion algorithm applied to track the orientation and position of the target;
Section 3 presents the experimental results and discussion; and
Section 4 states the conclusions of this paper.
3. Results and Discussion
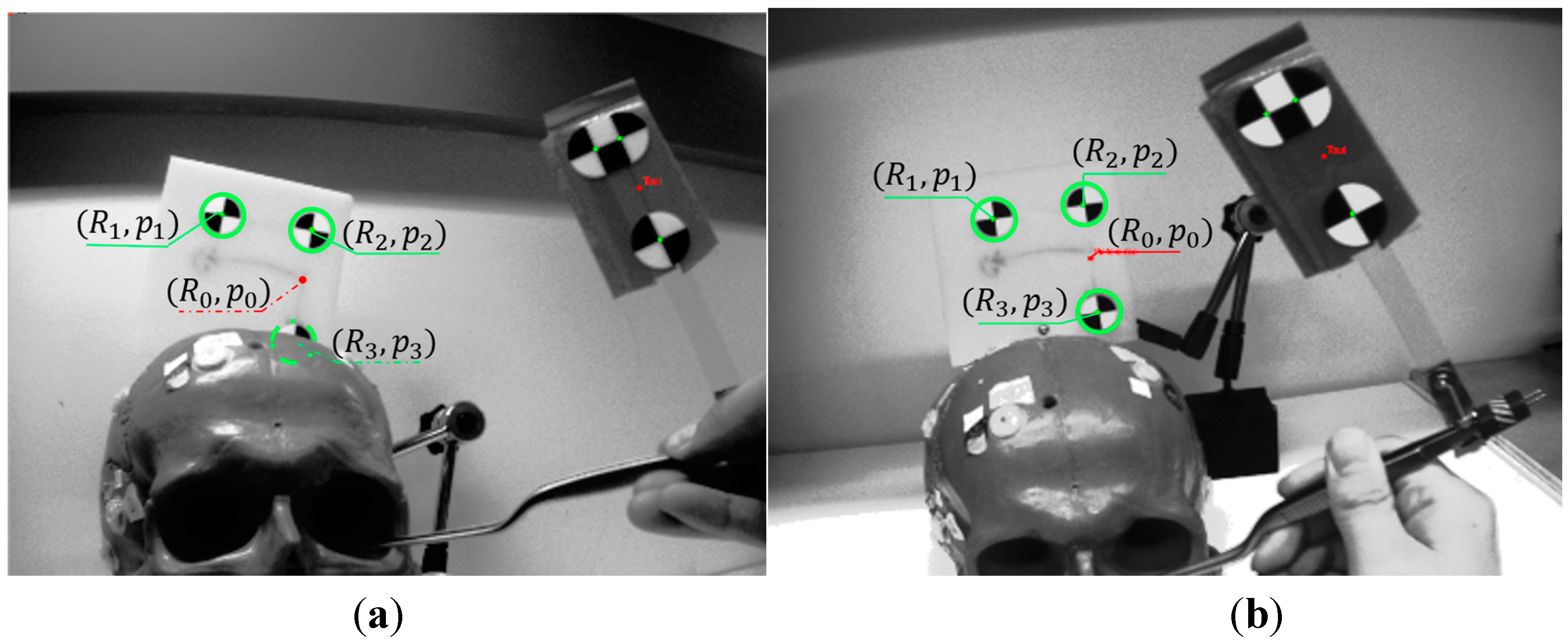
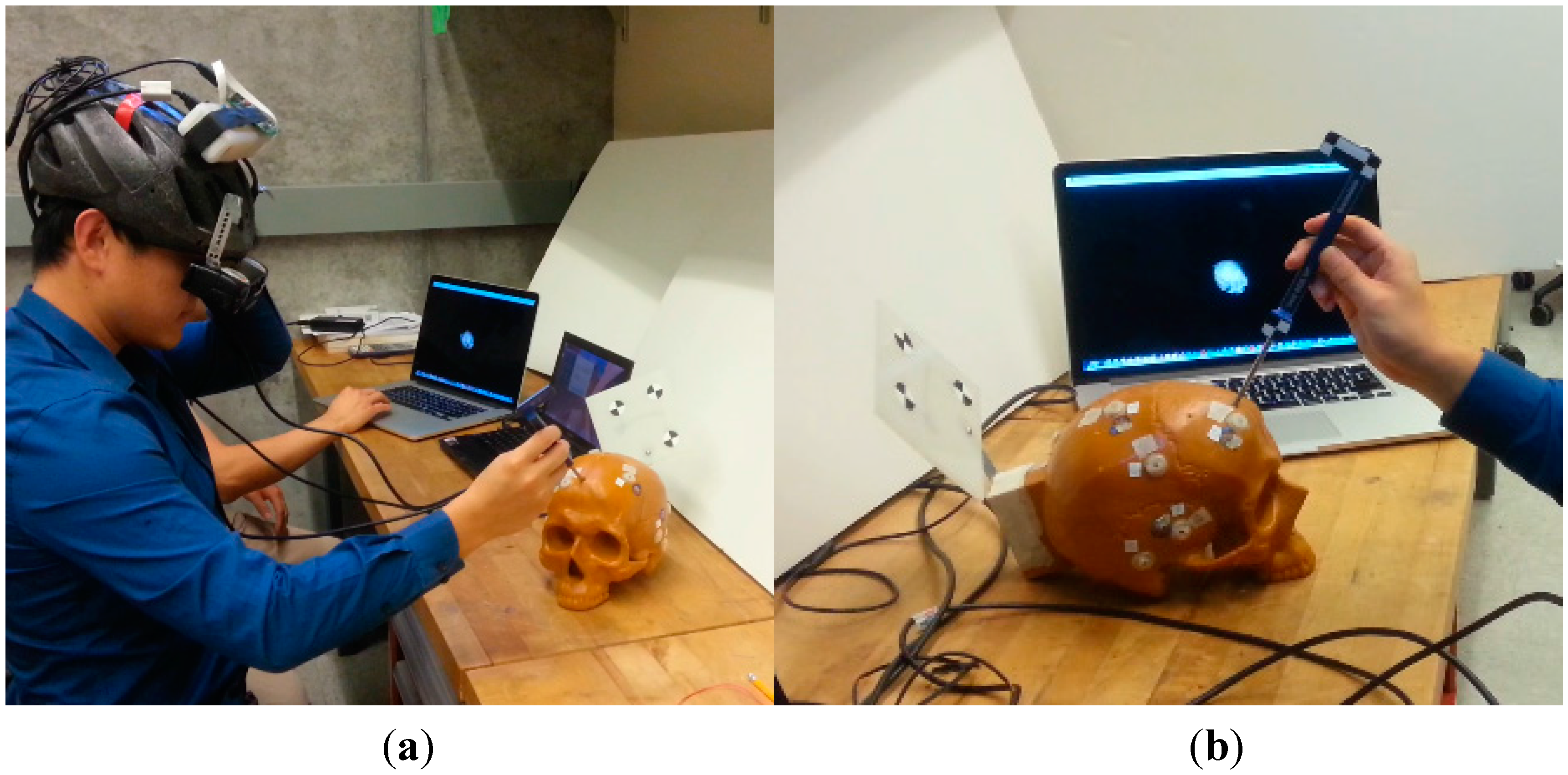
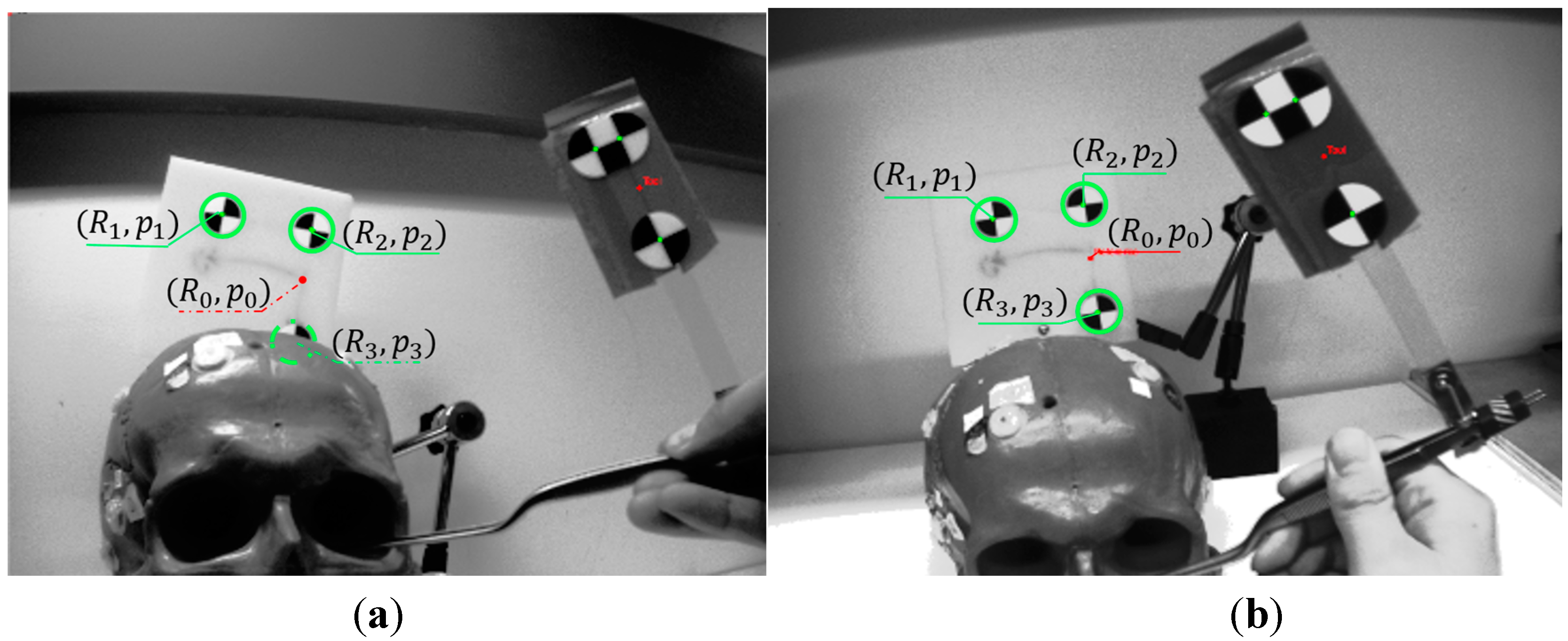
To validate the sensor fusion method proposed in this paper and evaluate the performance of the orientation and position tracking under partial and total occlusion conditions, experiments are performed with the HTS described in
Section 2.1. A skull model attached with the “reference” marker and a surgical tool attached with the “tool” marker are tracked by the HTS, as shown in
Figure 8. A similar experimental setup was used in our previous work [
18,
19], where only the OTS is used to track the markers.
Two sets of motions are used:
Static: To validate the bias calibration algorithm, we keep the HTS and the markers static for 40 min and record the inertial and optical data at an update rate of 100 Hz.
Motion under AR Application: We sequentially rotate the HTS by about 40° around each of the three axes and move the HTS along the three axes for about ±500 mm in the simulated surgical navigation experimental environment.
Figure 8.
(a) Experimental setup; (b) Reference marker attached on the surgical target and tool marker attached on the surgical tool.
Figure 8.
(a) Experimental setup; (b) Reference marker attached on the surgical target and tool marker attached on the surgical tool.
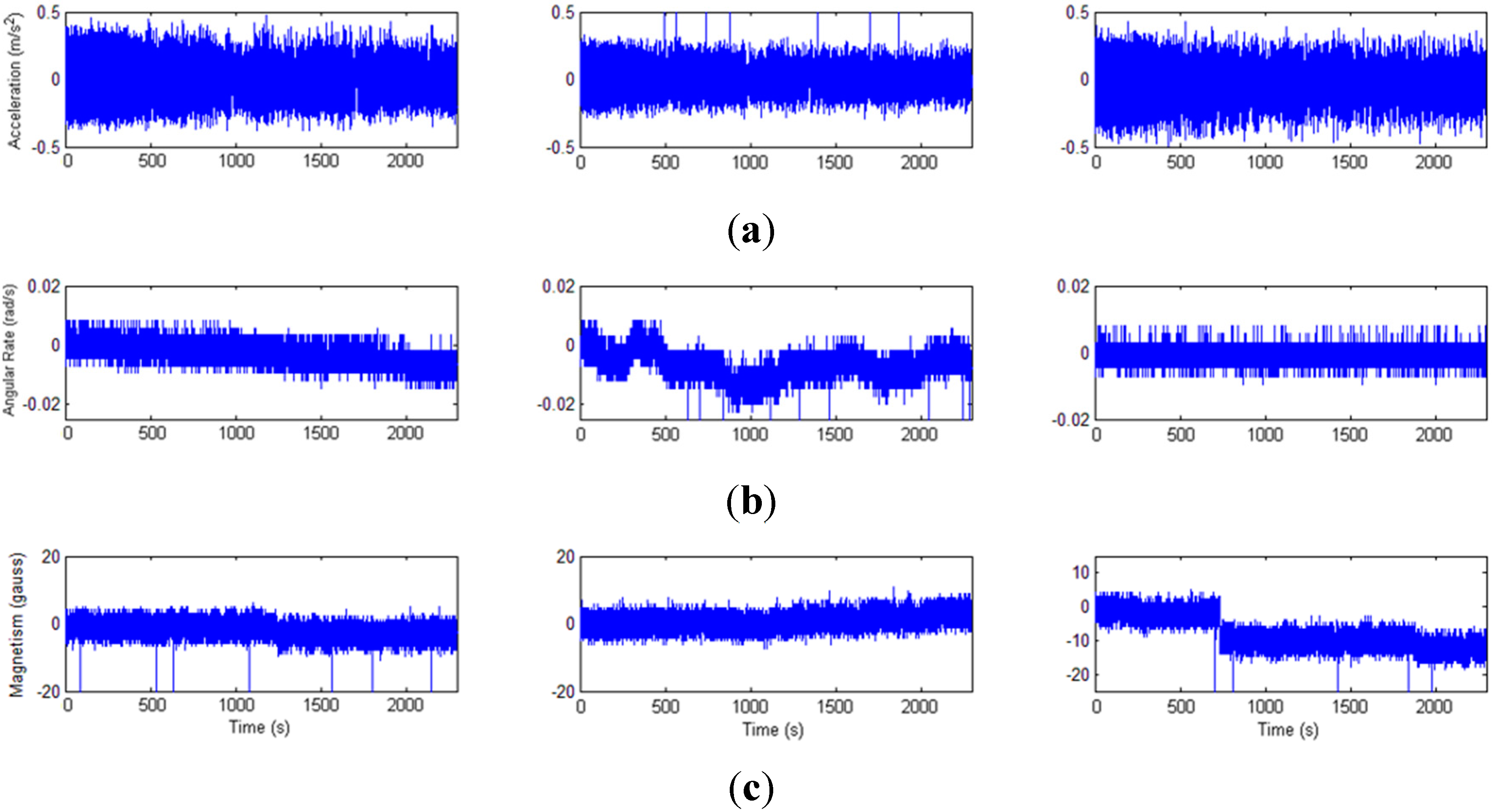
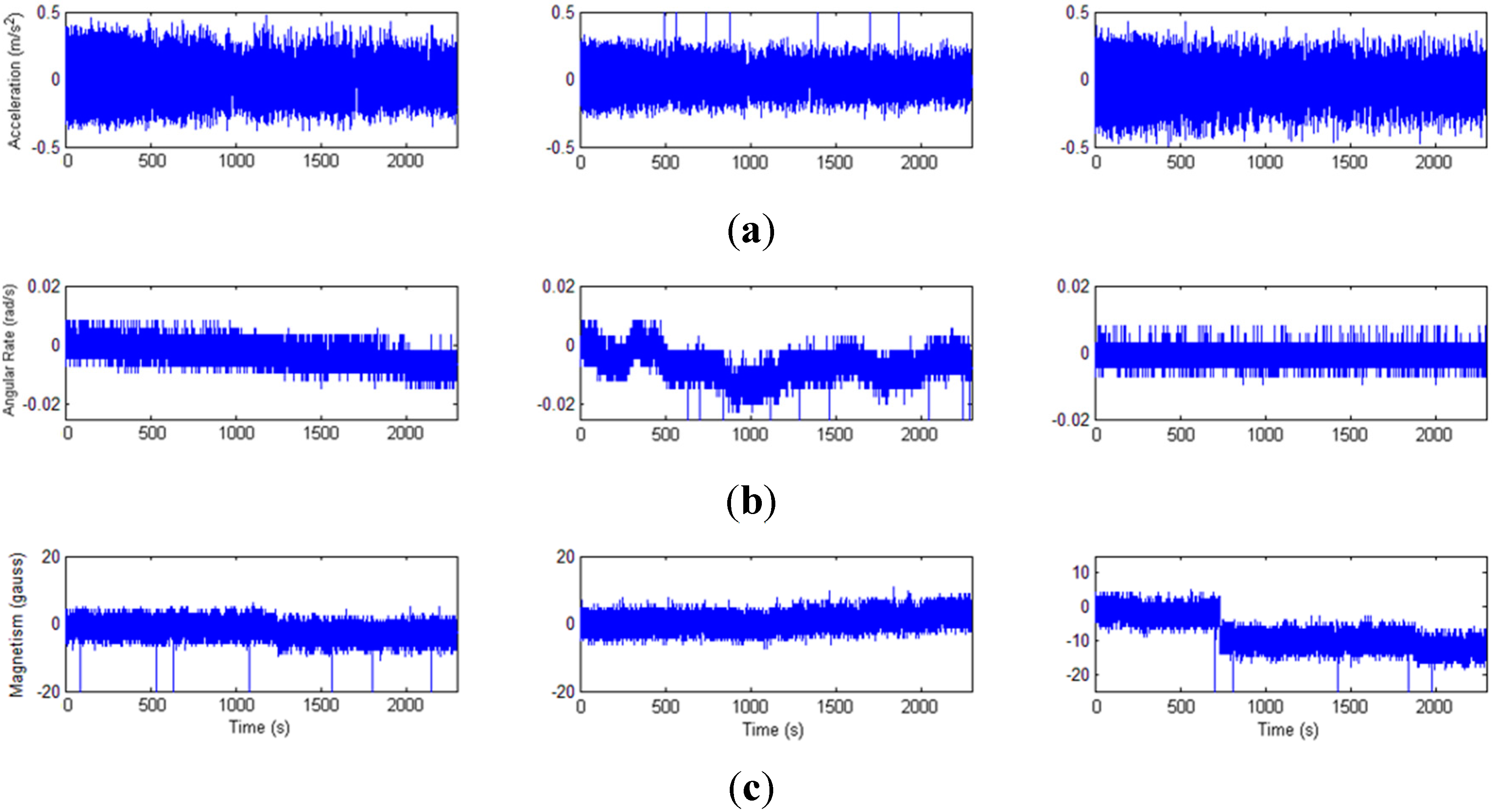
It can be seen from the static experimental results (
Figure 9) that obvious drift of gyroscope and magnetometer data bias exist. Two algorithms with and without the bias correction are compared and the results show that the bias error is voided by using the error model.
Table 1 shows that the root mean square errors (RMSE) of the orientation and position tracked by the proposed approach is 43% and 18% less than the result not using the OTS to correct the bias error, respectively.
Figure 9.
Bias of the inertial sensors. (a) Accelerometer; (b) Gyroscope; (c) Magnetometer.
Figure 9.
Bias of the inertial sensors. (a) Accelerometer; (b) Gyroscope; (c) Magnetometer.
Table 1.
Orientation and position tracking results with and without the error model.
Table 1.
Orientation and position tracking results with and without the error model.
| | Proposed HTS | HTS without Error Model |
|---|
| Tests | Orientation RMSE | PositionRMSE | Orientation RMSE | PositionRMSE |
| 1 | 0.026° | 0.101 mm | 0.044° | 0.129 mm |
| 2 | 0.023° | 0.096 mm | 0.039° | 0.112 mm |
| 3 | 0.029° | 0.113 mm | 0.052° | 0.136 mm |
To determine the typical drift rates for the biases and noise of the inertial sensor, an experiment is performed where we compute the orientation and position from the inertial data collected in the static experiment. The orientation is expressed as pitch, roll, and yaw angles and position on the three-axes, and the RMSE is computed by first subtracting the mean value from each set of angles and position. The resulting RMS orientation errors, expressed as pitch, roll, and yaw, are 0.0821°, 0.0495°, and 0.0917°, respectively, which characterizes the orientation error due to both sensor bias drift and noise. Obvious drifting in static position tracking results can be found in
Figure 10.
Figure 10.
Position (mm) in three-axes versus time, obtained by integration of accelerometer data. As expected, results show large errors in position as time increases.
Figure 10.
Position (mm) in three-axes versus time, obtained by integration of accelerometer data. As expected, results show large errors in position as time increases.
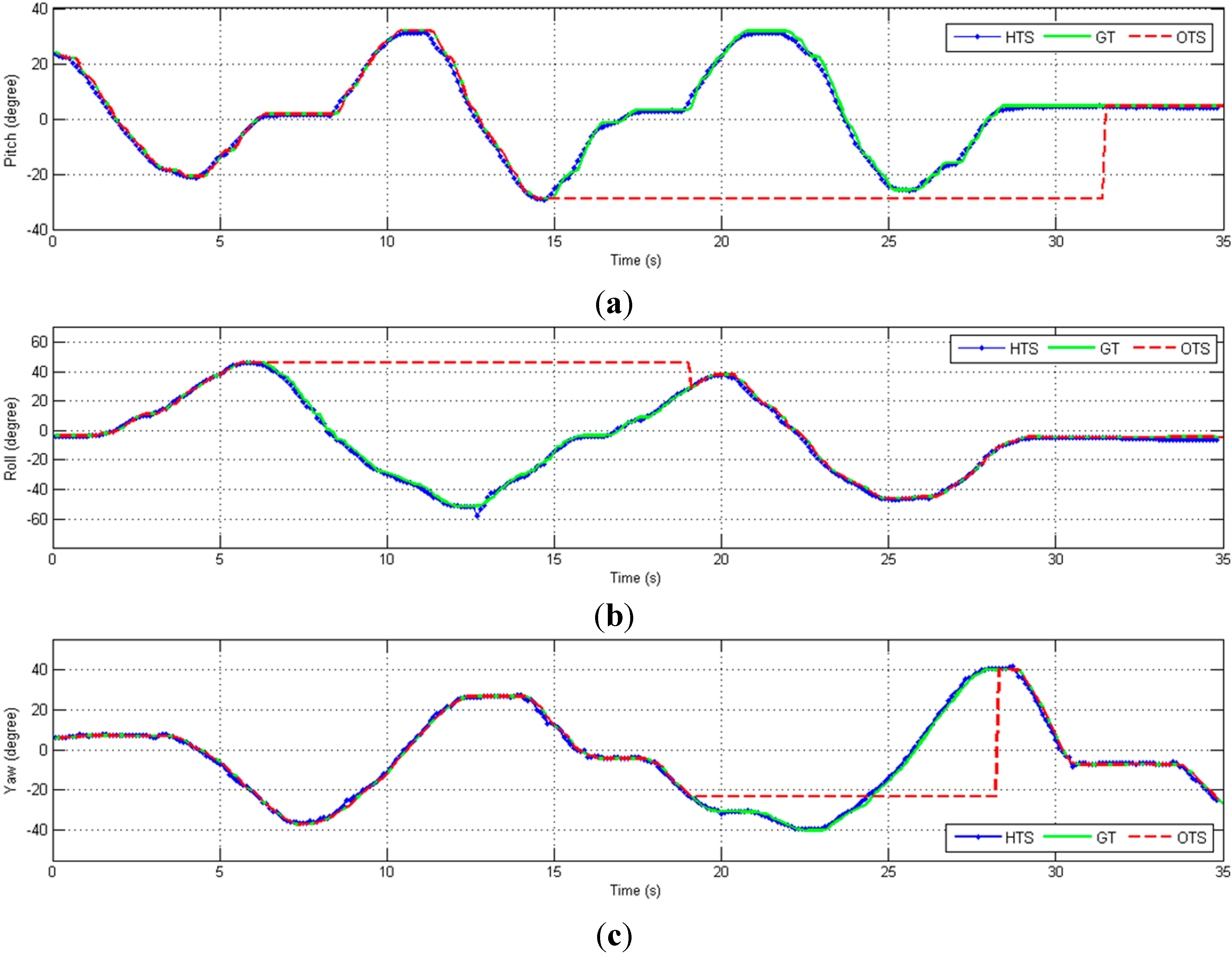
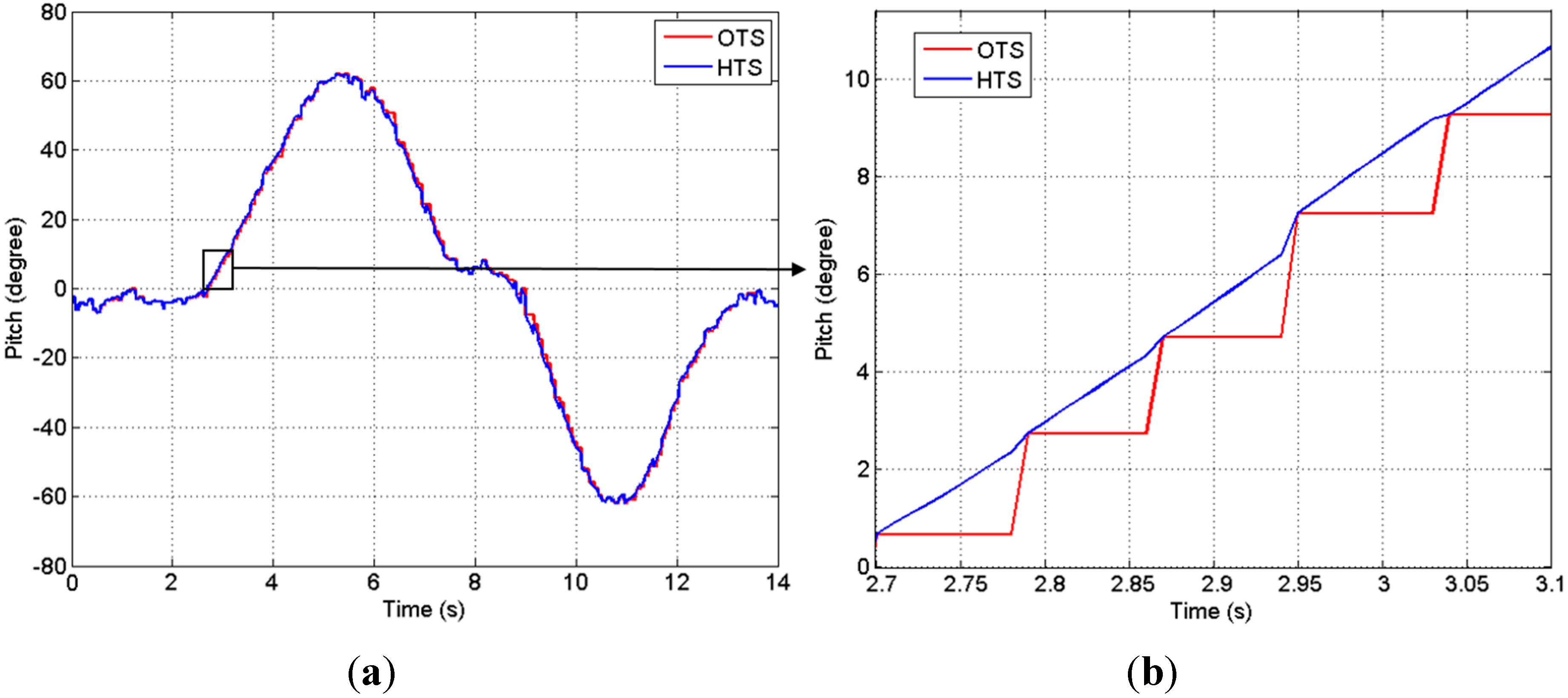
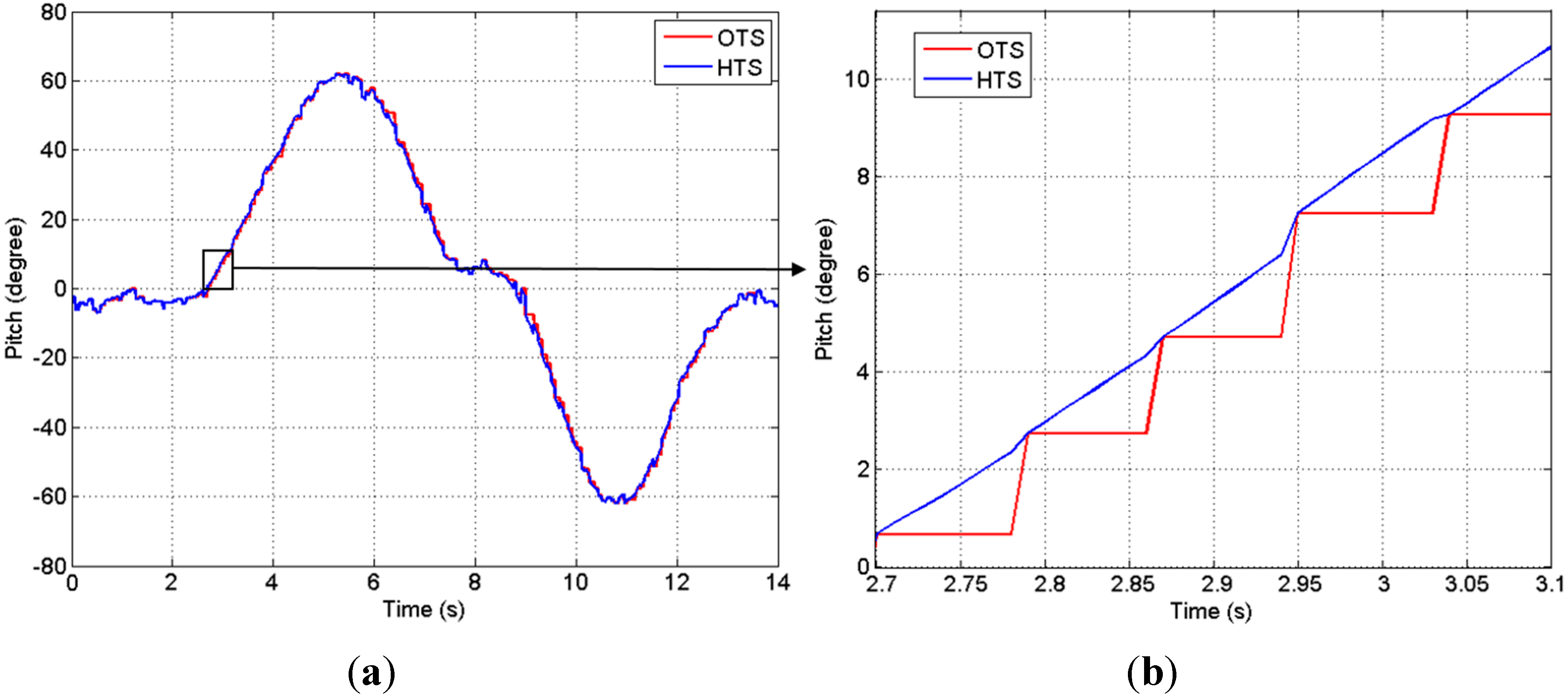
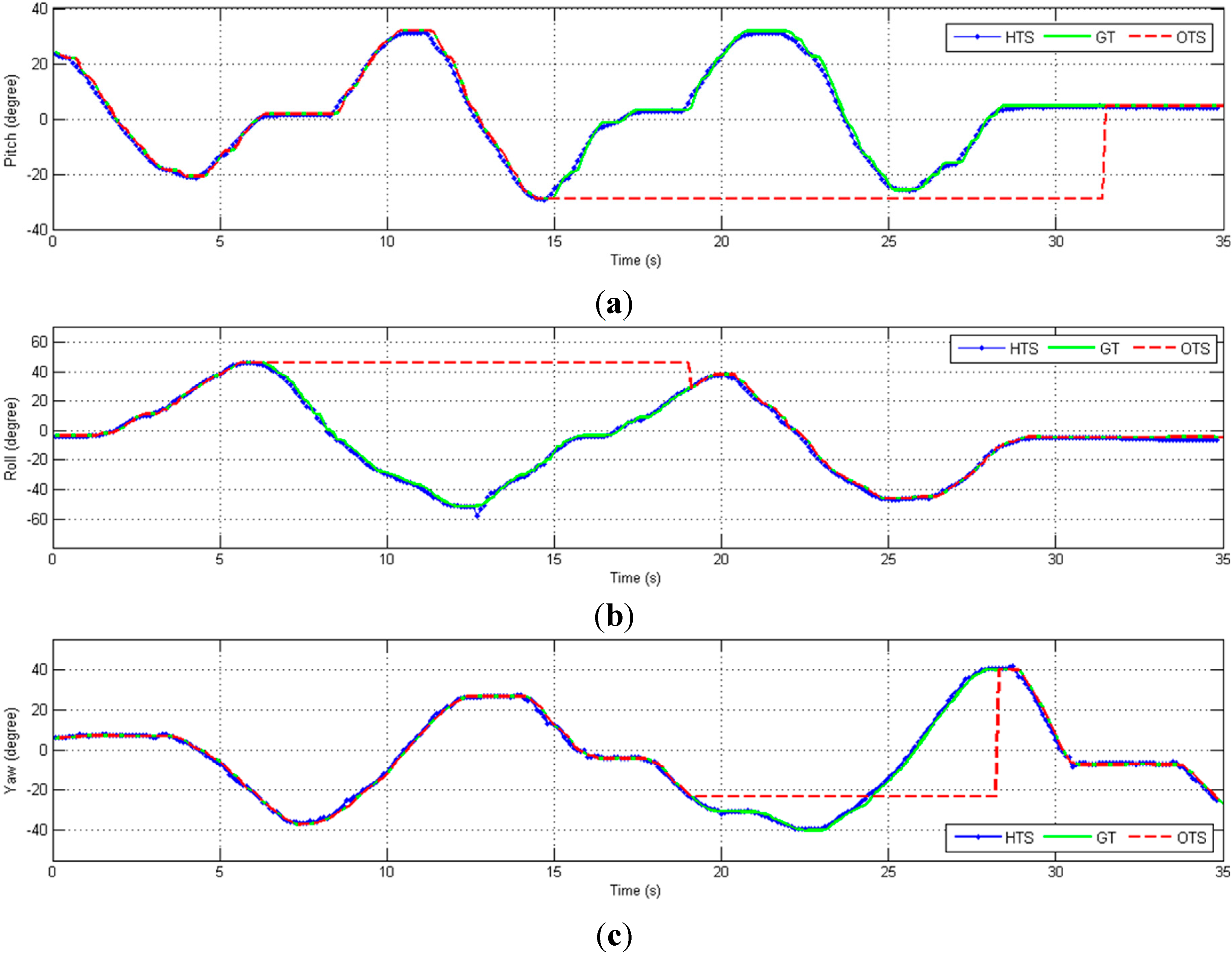
To test the dynamic tracking performance under partial occlusion conditions, some of the recorded marker positions are temporarily invalidated. This stops the bias estimation process and relies on the orientation estimated from the IMU measurement to recover the frame origin, as described in
Section 2. The orientation tracking result from the hybrid tracking system (HTS) and optical tracking system (OTS) is compared with ground truth (GT) and the comparison results are shown in
Figure 11.
Figure 11.
Orientation (degrees) in three-axes versus time, including cases of partial OTS occlusion (dashed red lines). (a) Pitch; (b) Roll; (c) Yaw.
Figure 11.
Orientation (degrees) in three-axes versus time, including cases of partial OTS occlusion (dashed red lines). (a) Pitch; (b) Roll; (c) Yaw.
Note that in our system, the orientation is always estimated from the measurements of the IMU, so the only effect of marker occlusion is to stop estimation of the bias terms. As shown in the
Figure 11, there is no noticeable impact on the estimated orientation when the markers are blocked because the orientation is computed from the inertial sensor data. Thus, the only effect of marker occlusion is that sensor biases are not compensated by the optical tracking data.
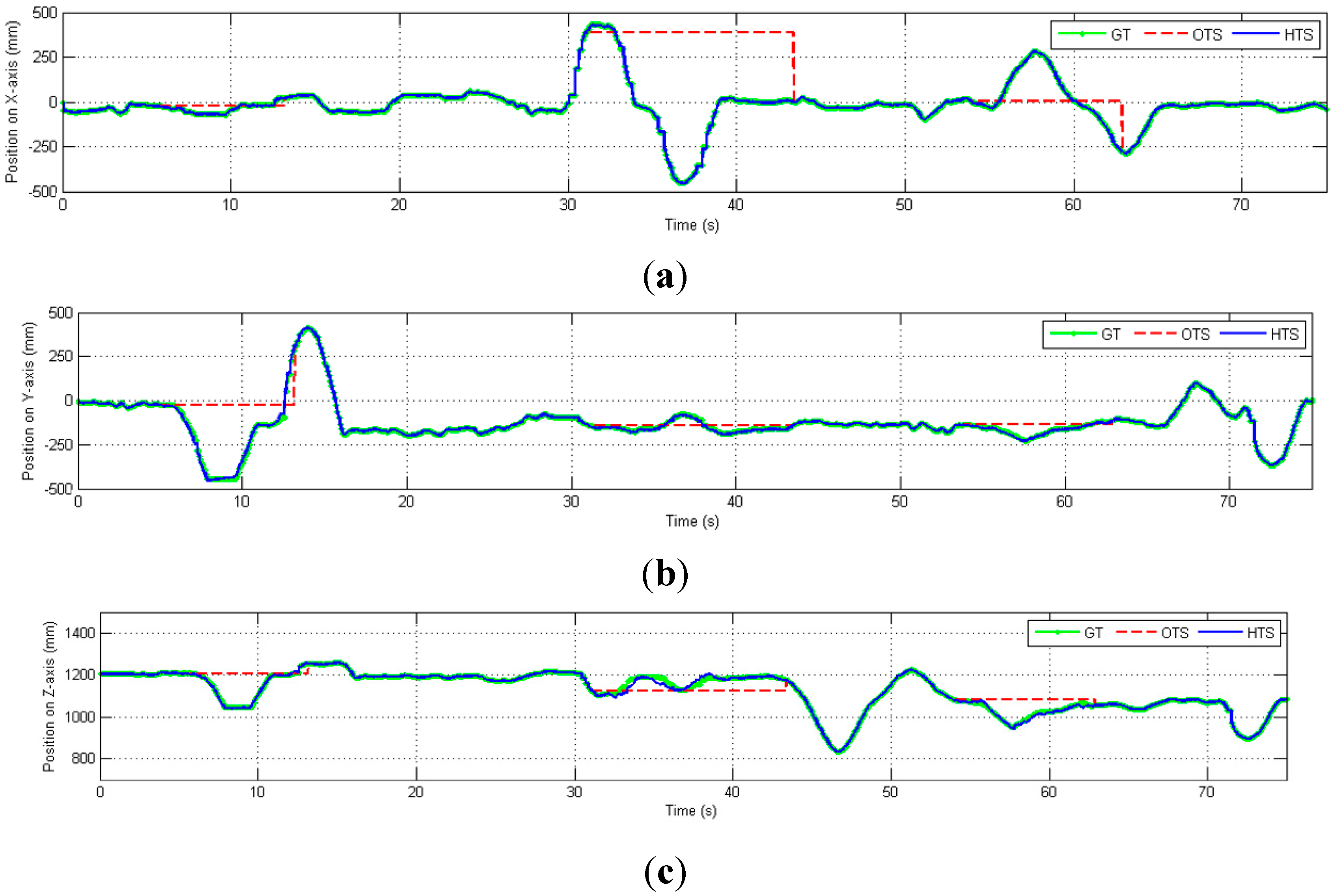
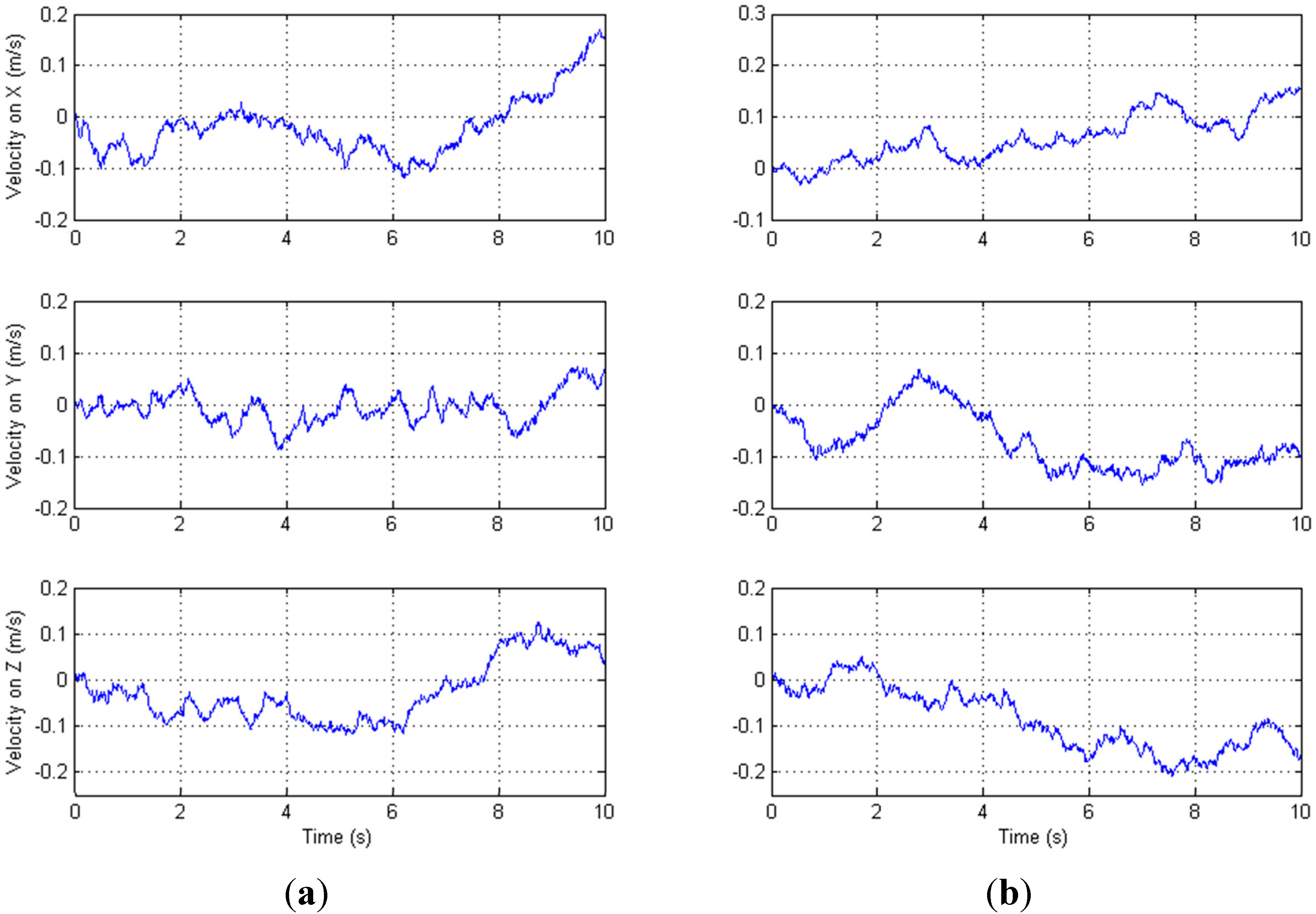
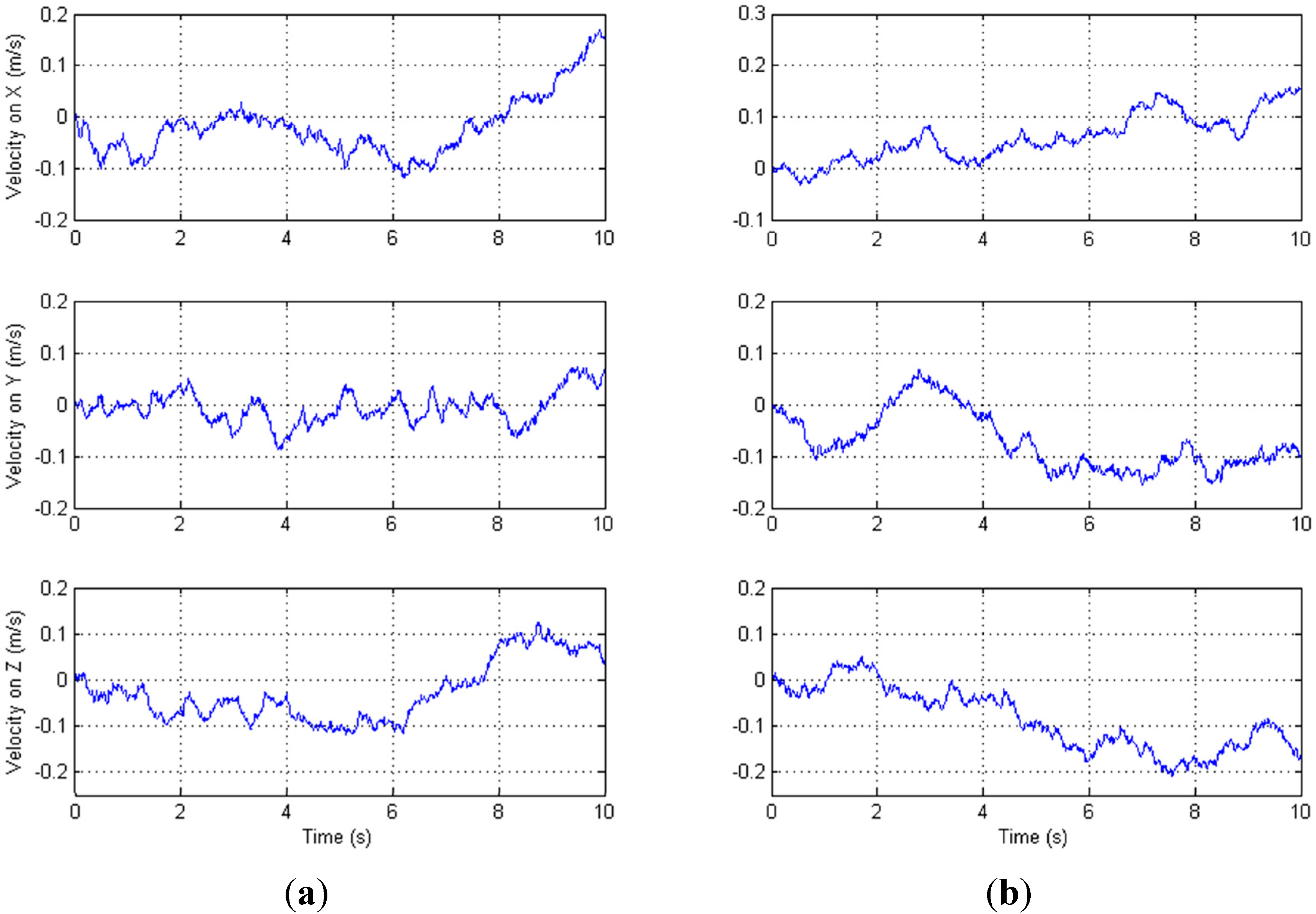
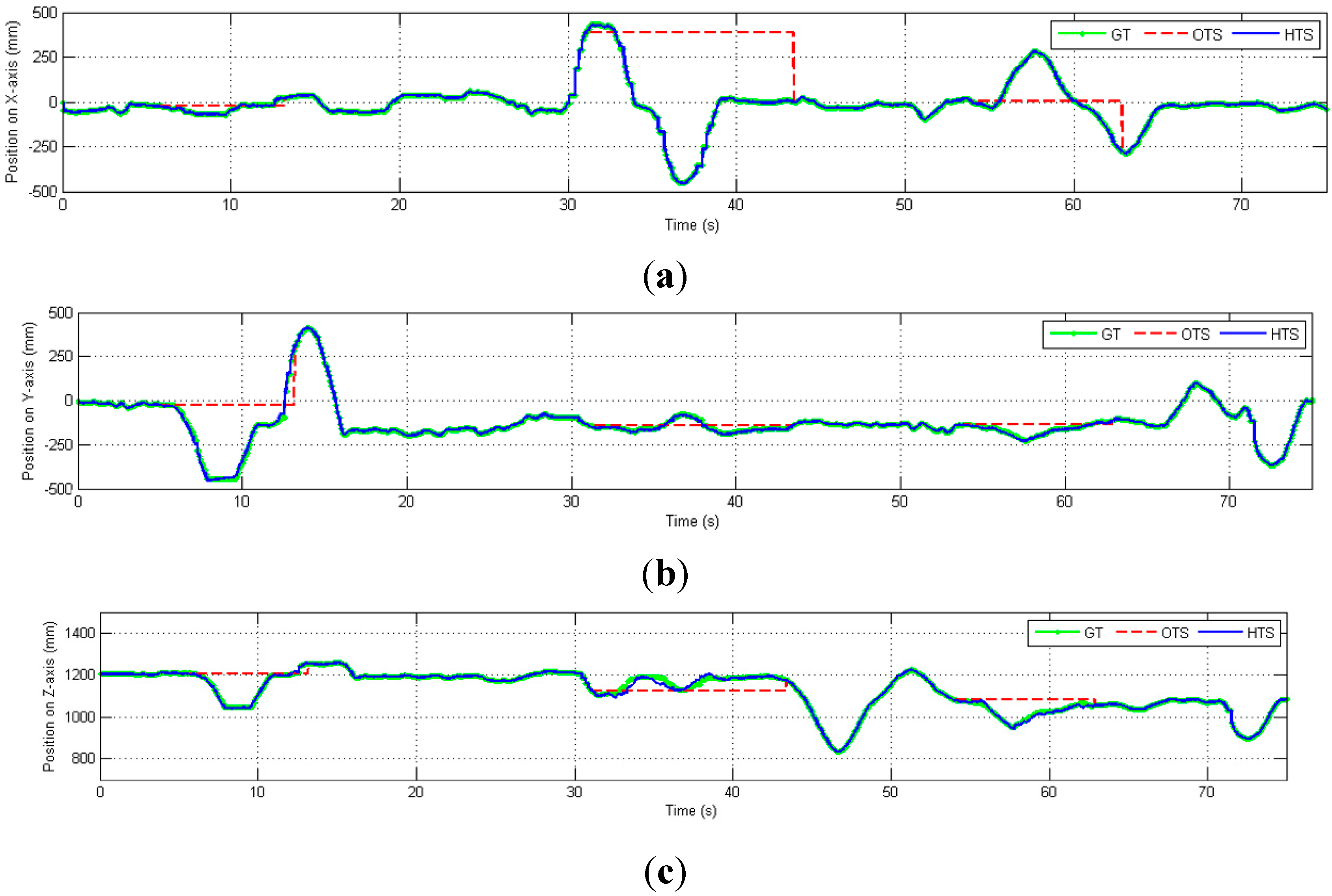
We then perform experiments to demonstrate the estimation of the position under partial occlusion conditions. The hybrid tracking system is moved in the X, Y, and Z directions, as shown in
Figure 12. The position error due to partial occlusion is relatively small, even though it is affected by inaccuracies in both the position and orientation measurements.
Figure 12.
Position (mm) in three-axes versus time, including cases of partial OTS occlusion (dashed red lines). (a) Position on X-axis; (b) Position on Y-axis; (c) Position on Z-axis.
Figure 12.
Position (mm) in three-axes versus time, including cases of partial OTS occlusion (dashed red lines). (a) Position on X-axis; (b) Position on Y-axis; (c) Position on Z-axis.
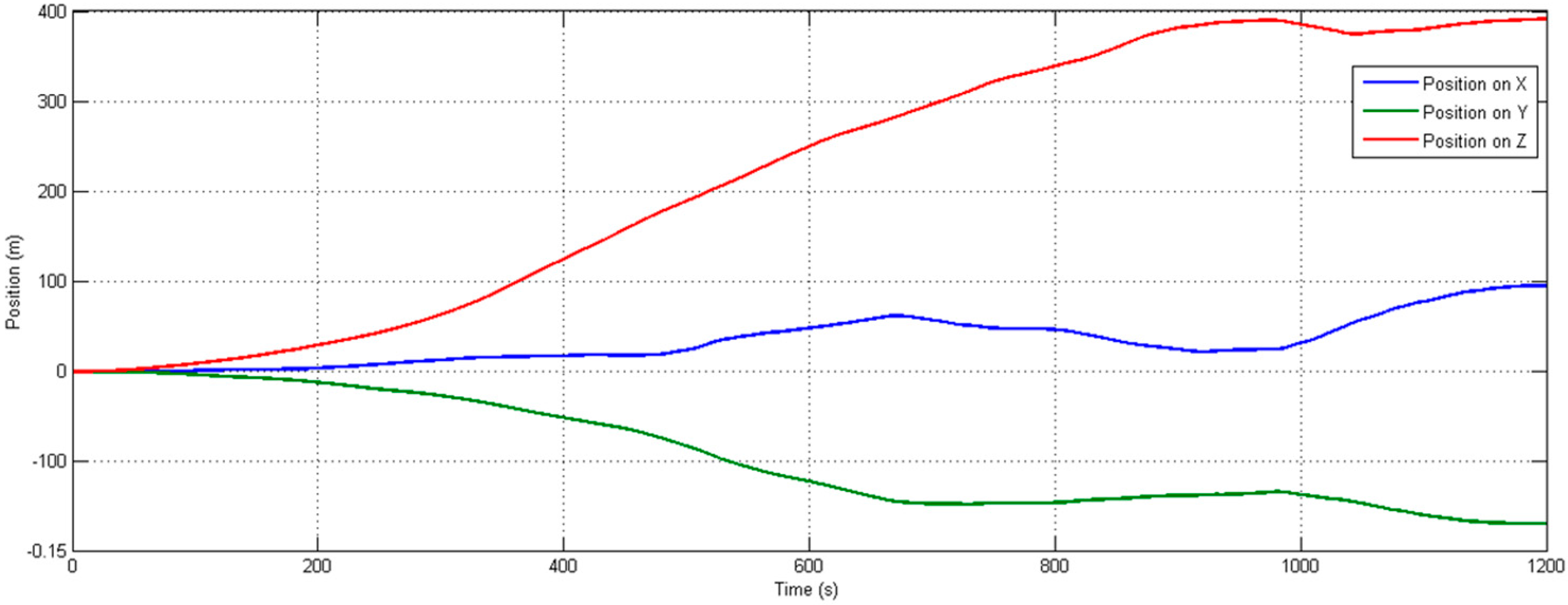
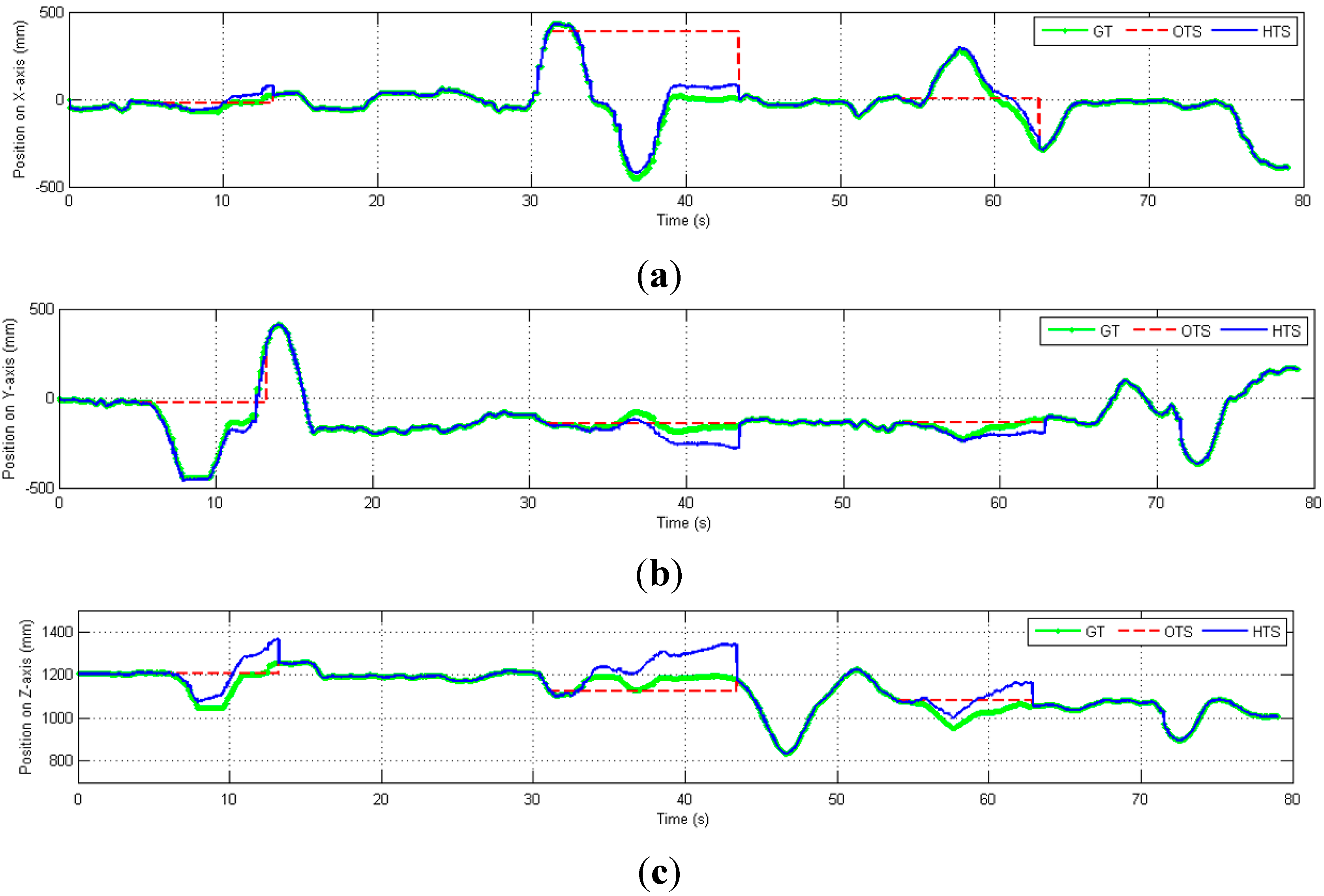
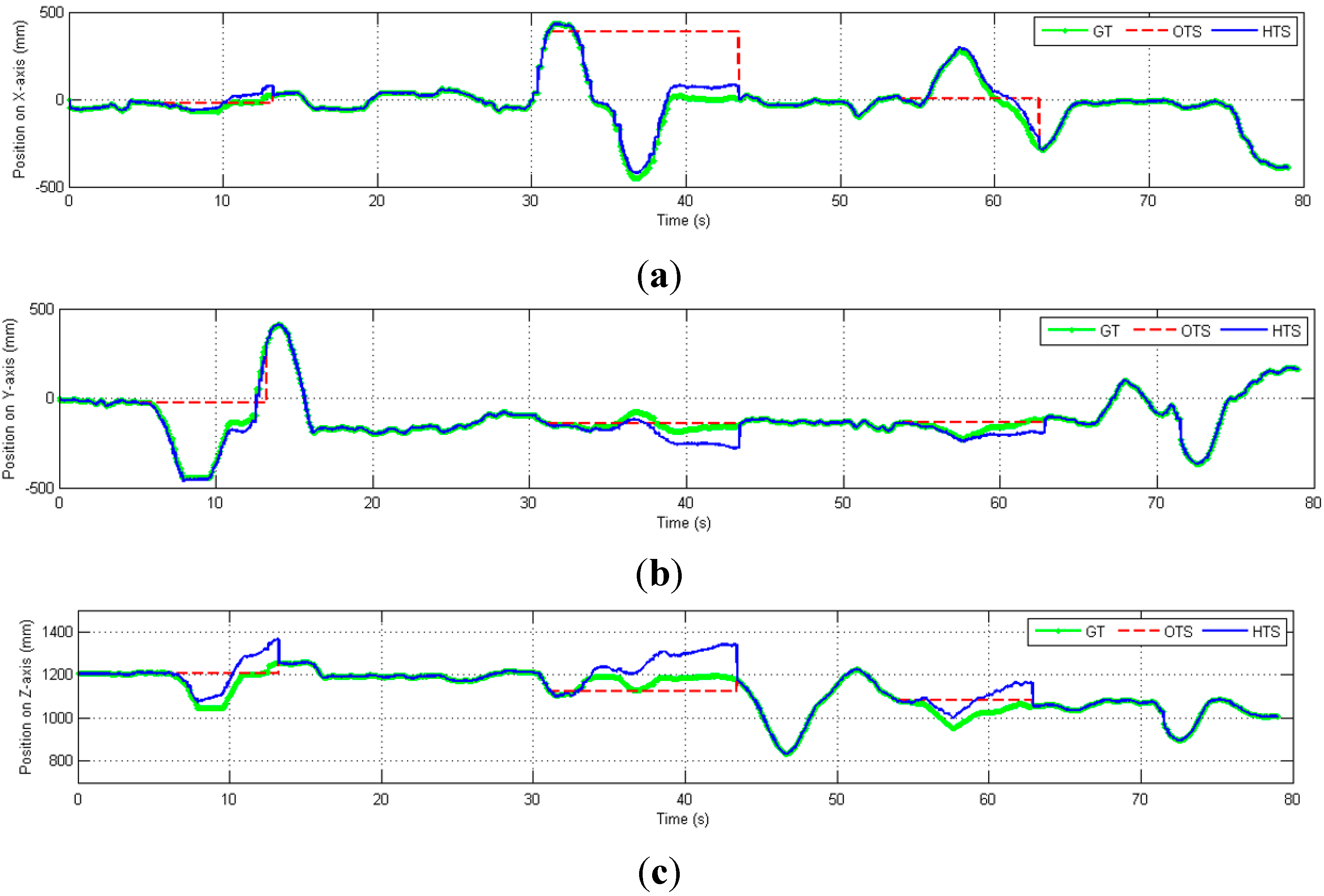
Figure 13.
Position (mm) in three-axes versus time, including cases of full OTS occlusion (dashed red lines). (a) Position on X-axis; (b) Position on Y-axis; (c) Position on Z-axis.
Figure 13.
Position (mm) in three-axes versus time, including cases of full OTS occlusion (dashed red lines). (a) Position on X-axis; (b) Position on Y-axis; (c) Position on Z-axis.
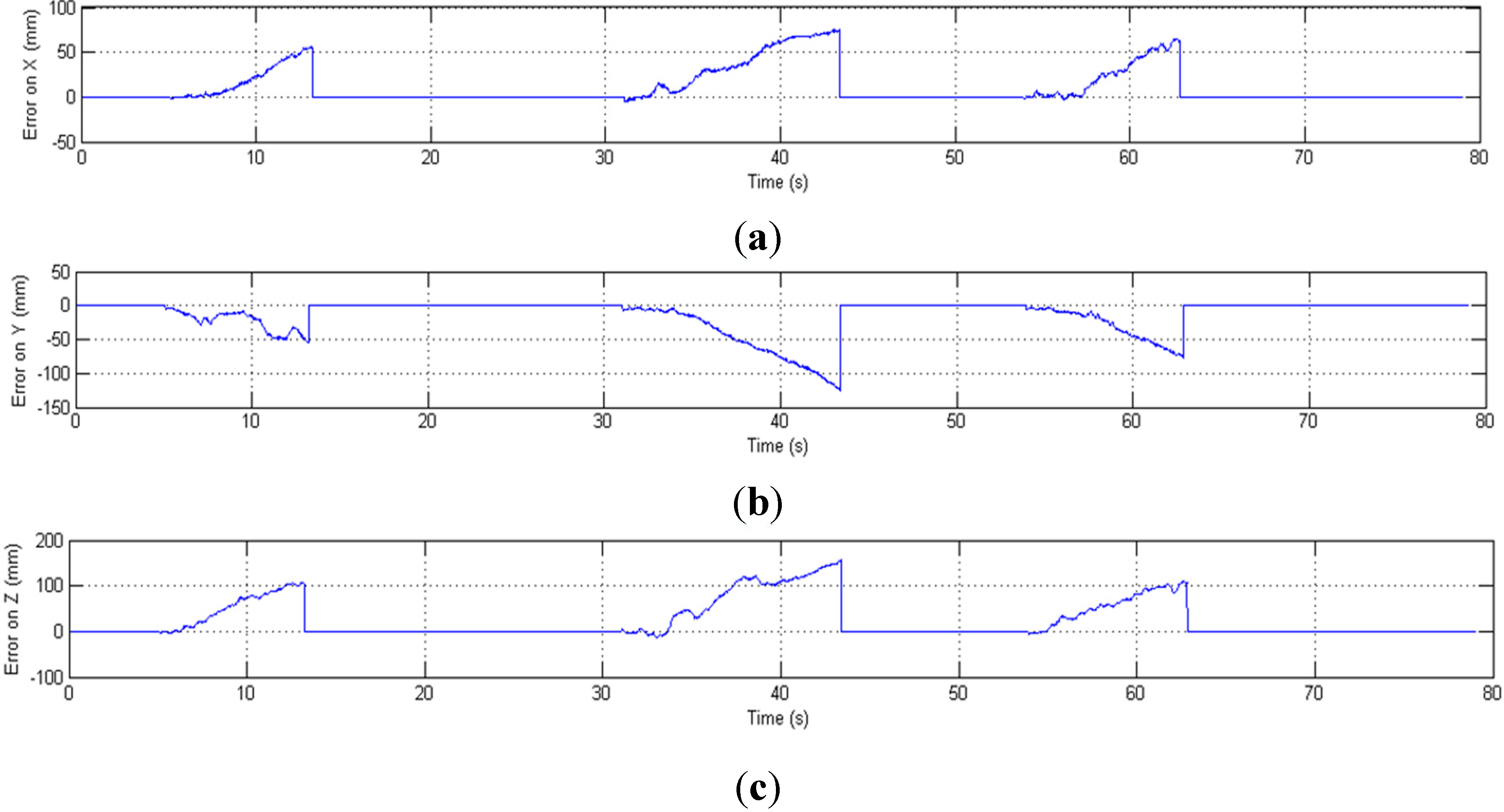
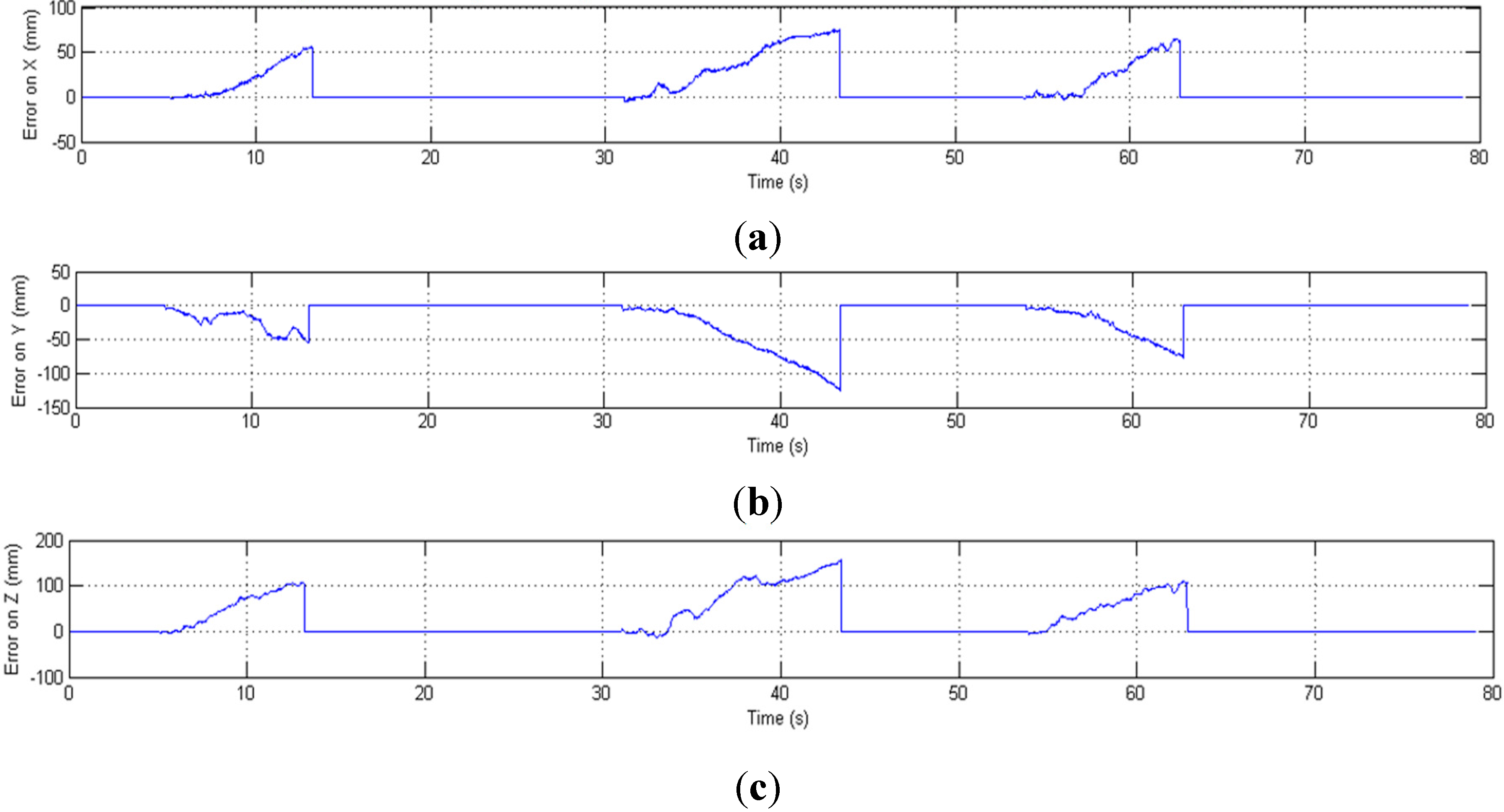
If none of the markers are visible, the position tracking is only based on the inertial sensors data. Without the drift-free marker position information and real-time calibration from the OTS, the inertial sensors’ noise is double integrated which causes the estimated position to drift from the ground truth at an increasing rate, as shown in
Figure 13 and
Figure 14. When all markers are occluded (during 5.5–13.2 s, 31.07–43.4 s and 53.95–62.88 s), the OTS (red) cannot track the position while the HTS (blue) can track the position correctly only in the beginning of the occlusion but quickly drifts away from the ground truth.
Figure 14.
Position error (mm) in three-axes
versus time; error increases in cases of full OTS occlusion (times corresponding to dashed red lines in
Figure 13). (
a) Error of position on X-axis; (
b) Error of position on Y-axis; (
c) Error of position on Z-axis.
Figure 14.
Position error (mm) in three-axes
versus time; error increases in cases of full OTS occlusion (times corresponding to dashed red lines in
Figure 13). (
a) Error of position on X-axis; (
b) Error of position on Y-axis; (
c) Error of position on Z-axis.
The orientation and position tracking results from motion experiments under different conditions are shown in
Table 2 and
Table 3, where the updating rate is 100 Hz. The position errors when all markers are occluded increases over time at a high rate, but a similar increase is not observed in
Table 2, where only some of the markers are occluded. The maximum position error in one minute is 337.1 mm when all markers are occluded, whereas the maximum error with partially occluded markers is 0.173 mm. This demonstrates that with the sensor fusion approach proposed in this paper and incomplete optical information, the HTS can recover the lost orientation information and obtain accurate 6-DOF pose measurements. If all the optical tracking information is missing, the HTS can only limit the position error to a small value (e.g., 0.42 mm) over a short time (e.g., 1 s). In [
21], inertial and optical data are fused to track 6-DOF pose, but the bias of inertial sensors is not corrected by the OTS. Their experimental result shows that the position RMSE for a time interval of 3 s is 7.4 mm when one of the markers is visible and 147.3 mm when all of the markers are occluded. Compared with the results in [
21], the position and orientation RMSE in
Table 2 and
Table 3 are lower, which demonstrates that with the help of the bias-correction approach proposed in
Section 2, the HTS can more accurately track the 6-DOF motion.
Table 2.
Hybrid Tracker performance under partial occlusion condition.
Table 2.
Hybrid Tracker performance under partial occlusion condition.
| Tests | Orientation RMSE | Orientation Max Error | Position RMSE | Position Max Error |
|---|
| 1 s | 0.019° | 0.055° | 0.108 mm | 0.140 mm |
| 5 s | 0.023° | 0.048° | 0.071 mm | 0.145 mm |
| 10 s | 0.028° | 0.065° | 0.118 mm | 0.152 mm |
| 20 s | 0.031° | 0.069° | 0.117 mm | 0.154 mm |
| 60 s | 0.040° | 0.090° | 0.134 mm | 0.173 mm |
Table 3.
Hybrid Tracker performance under full occlusion condition.
Table 3.
Hybrid Tracker performance under full occlusion condition.
| Tests | Orientation RMSE | Orientation Max Error | Position RMSE | Position Max Error |
|---|
| 1 s | 0.022° | 0.052° | 0.22 mm | 0.42 mm |
| 5 s | 0.026° | 0.058° | 3.85 mm | 7.23 mm |
| 10 s | 0.021° | 0.059° | 7.41 mm | 12.05 mm |
| 20 s | 0.028° | 0.061° | 16.68 mm | 31.56 mm |
| 60 s | 0.030° | 0.077° | 146.63 mm | 337.1 mm |
4. Conclusions
This paper presents a sensor fusion approach that combines an OTS with an IMU. The optical tracking result is used to correct the bias of the inertial sensors when all of the markers are visible. The integration scheme is performed in an EKF where the state vector consists of orientation, position, and velocity. The accelerometer and magnetometer feedback are combined to provide a measurement update of the orientation. The position measurement is obtained from the optical tracker when at least one marker is visible. If some markers are occluded, the optical tracker provides the positions of the visible markers and therefore the marker design geometry, in conjunction with the IMU-estimated orientation, is used to compute the frame position. The bias-corrected inertial sensors are used to track position for a short time (up to a few seconds) when all the markers are occluded. Experimental results show that the sensor fusion approach can accurately estimate the 6-DOF pose for long durations when some of the markers are occluded and for a few seconds when all of the markers are occluded.
In practice, it is expected that this sensor fusion approach will provide satisfactory accuracy over relatively long periods of partial marker occlusion. The determining factors include the stability of the estimated bias terms. If the sensor biases drift, it will be necessary to restore full line-of-sight so that the biases can be re-estimated. This is particularly important for the magnetometer bias, which can have large variations due to magnetic field disturbances.
Future work will include applying this method to track both the reference frame and surgical tool, which can be achieved by integrating another wireless and more lightweight IMU on the surgical tool.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}