3.1. The Concept and Detection of Nano-Sized Target Particles via Columnar Particles
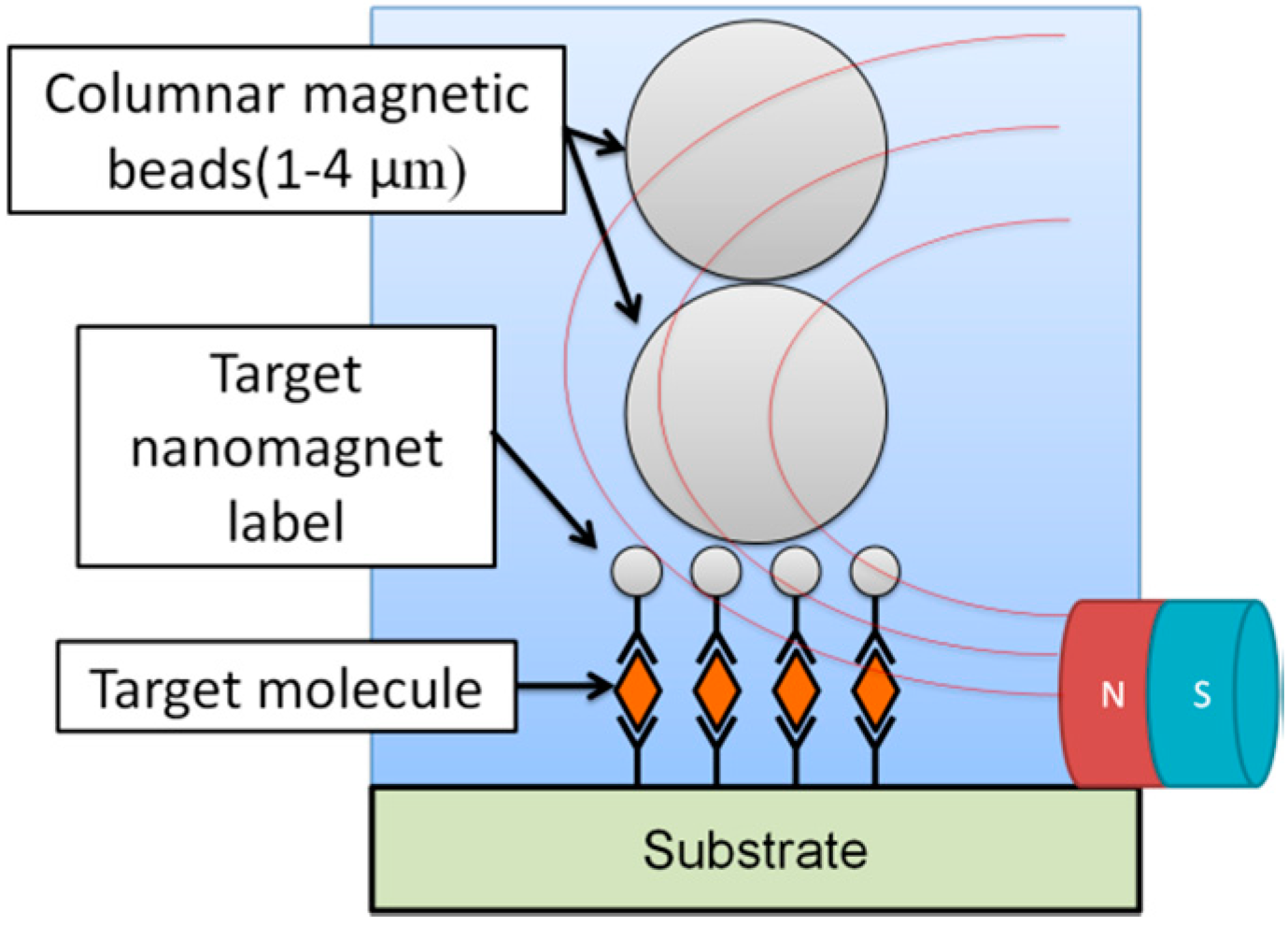
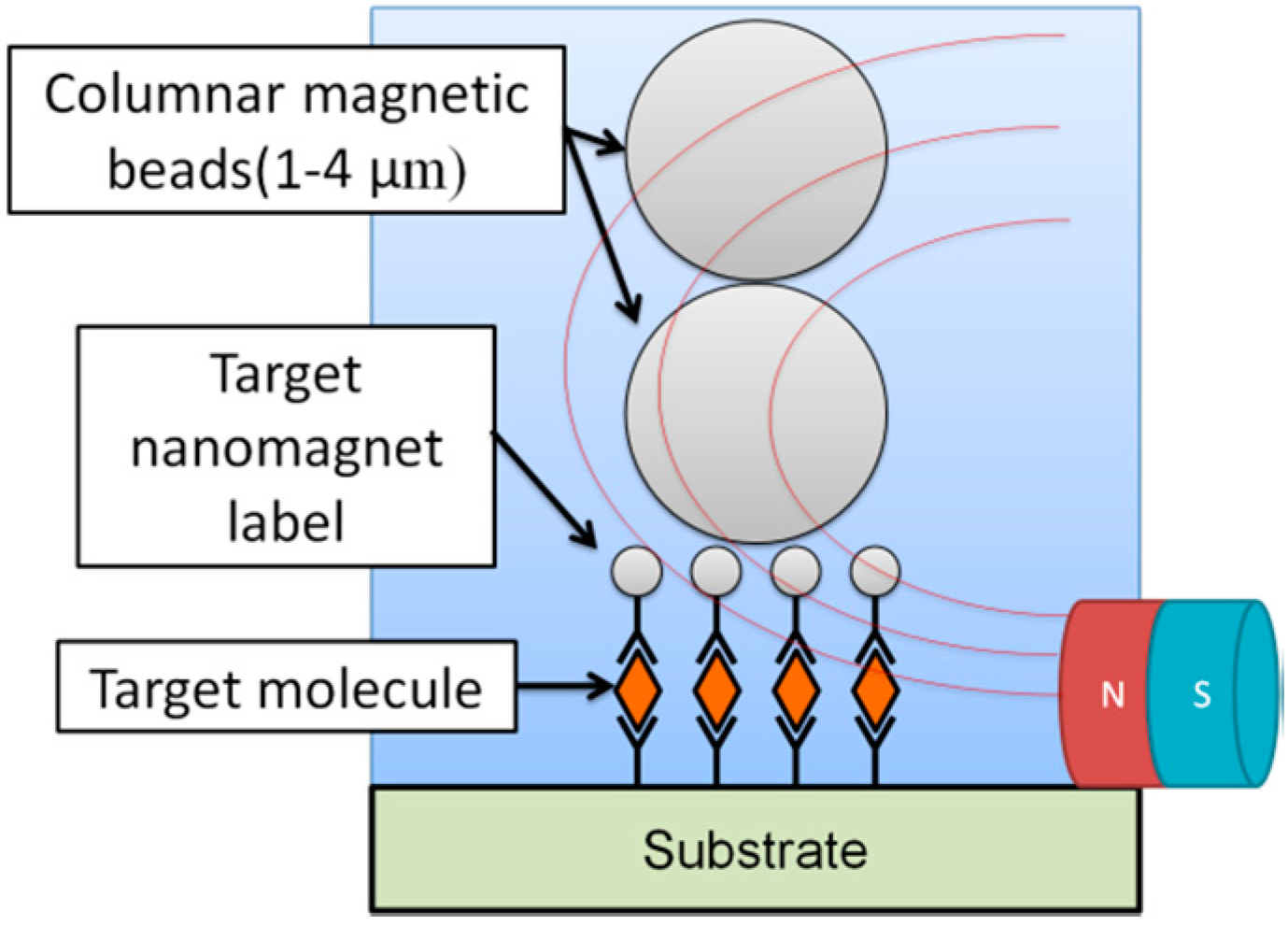
As discussed above, we developed a Hall sensor-based magnetic particle detection system and successfully detected micro- and nano-sized particles on the sensor surface. For more practical applications, the detection of nano-sized magnetic particles is needed to improve quantification and prevent steric hindrance. However, the detection of nano-sized magnetic particles by typical magnetic sensors still faces difficulties due to intrinsic noise, particularly in the case of detecting the small numbers of magnetic nano-sized particles. To overcome this difficulty, we demonstrated a simple method to detect small numbers of nano-sized magnetic particles via the observation of magnetically captured micro-sized magnetic particles. This method is called magnetically induced self-assembly of magnetic particles [
8]. The schematic image of our basic concept is described in
Figure 3. First, nano-sized magnetic particles are attached on the sensing area surface via a target biomaterial. Subsequently, a solution containing micro-sized magnetic beads or columnar magnetic beads dropped onto the sensing area. Then, after applying magnetic field by permanent magnet, columnar beads are magnetically captured onto the nano-sized magnetic particles. Through the trapping of the micro-sized particles, we can detect the existence of the nano-sized particles on the sensing area by conventional optical microscope, which is a fairly inexpensive set-up.
Figure 3.
Our concept for a simple method to detect nano-sized magnetic particles via magnetically captured micro-sized magnetic particles using an optical microscope. Adapted from [
8].
Figure 3.
Our concept for a simple method to detect nano-sized magnetic particles via magnetically captured micro-sized magnetic particles using an optical microscope. Adapted from [
8].
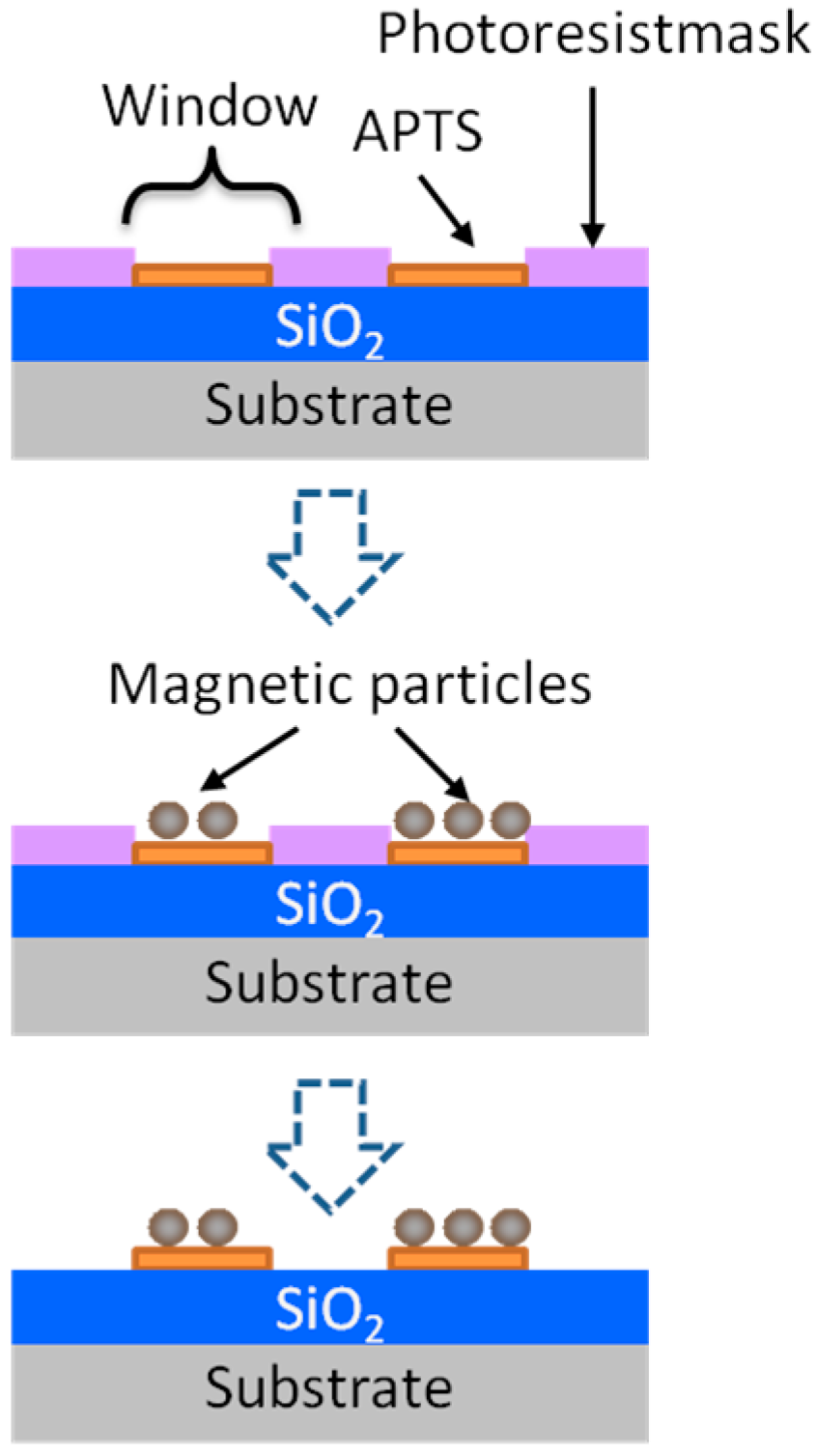
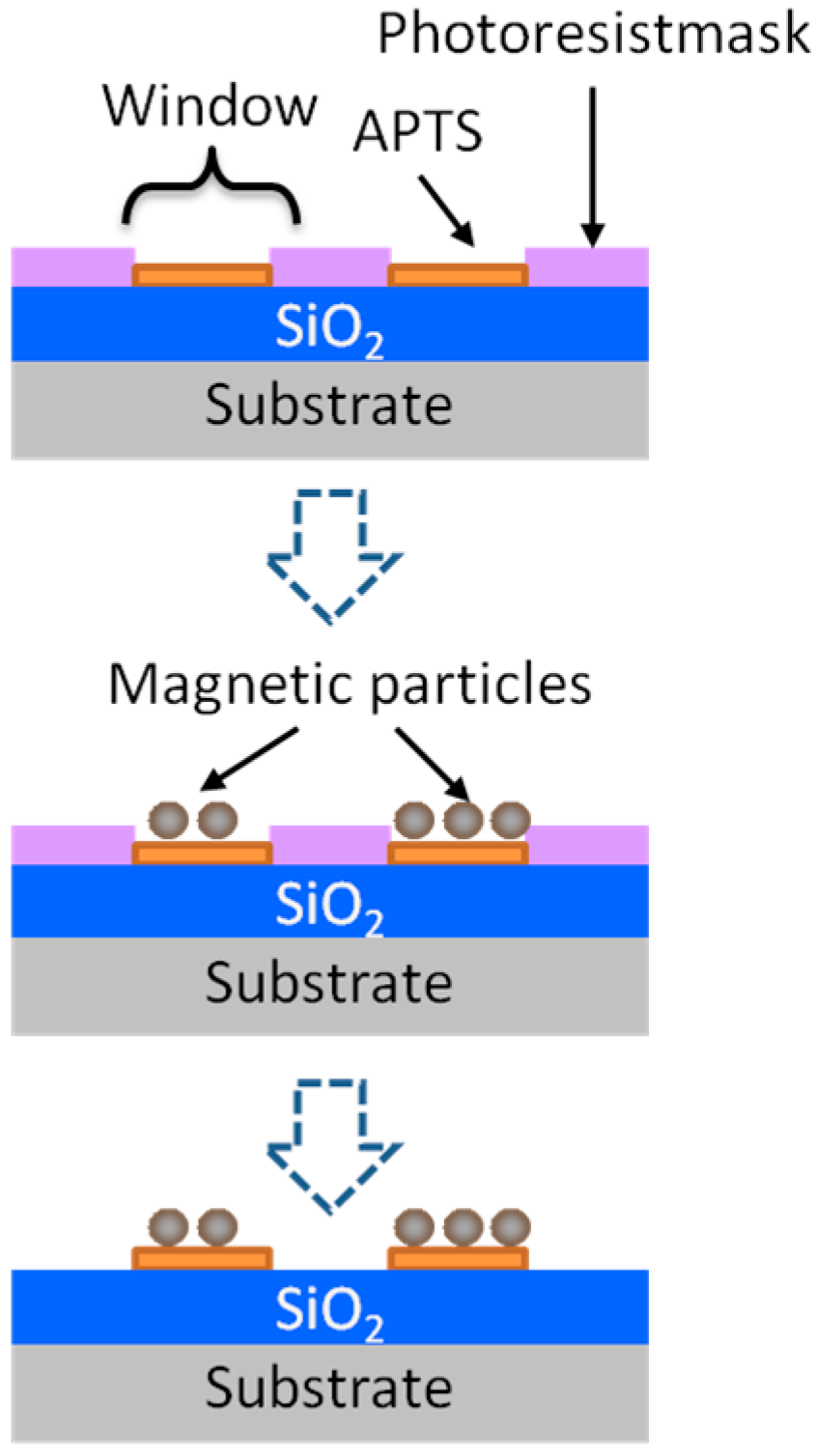
To test our concept, we adopted chemical binding between the nano-sized particles and the sensor surface in order to mimic the target bimolecular reaction. The procedure to immobilize nano-sized magnetic particles is summarized in
Figure 4. First, a typical photolithograph technique was utilized to make windows onto the photo resist layer on the surface of thermal-oxidized silicon substrate. Then, the substrate was dipped into a solution containing aminofuntional silane [3-(2Aminoethylamino) propyltrimethoxysilane (APTS)] to make a silane-copling layer solely on the window-opened regions. Following the APTS treatment, the substrate was kept in the solution containing nano-sized magnetic particles which has a carboxyl group on the surface. Finally, partially particle-immobilized regions were obtained after a resist lift-off process.
Figure 4.
The procedure to immobilize nano-sized magnetic particles partially on the surface of thermally-oxide silicon substrate. Adapted from [
8].
Figure 4.
The procedure to immobilize nano-sized magnetic particles partially on the surface of thermally-oxide silicon substrate. Adapted from [
8].
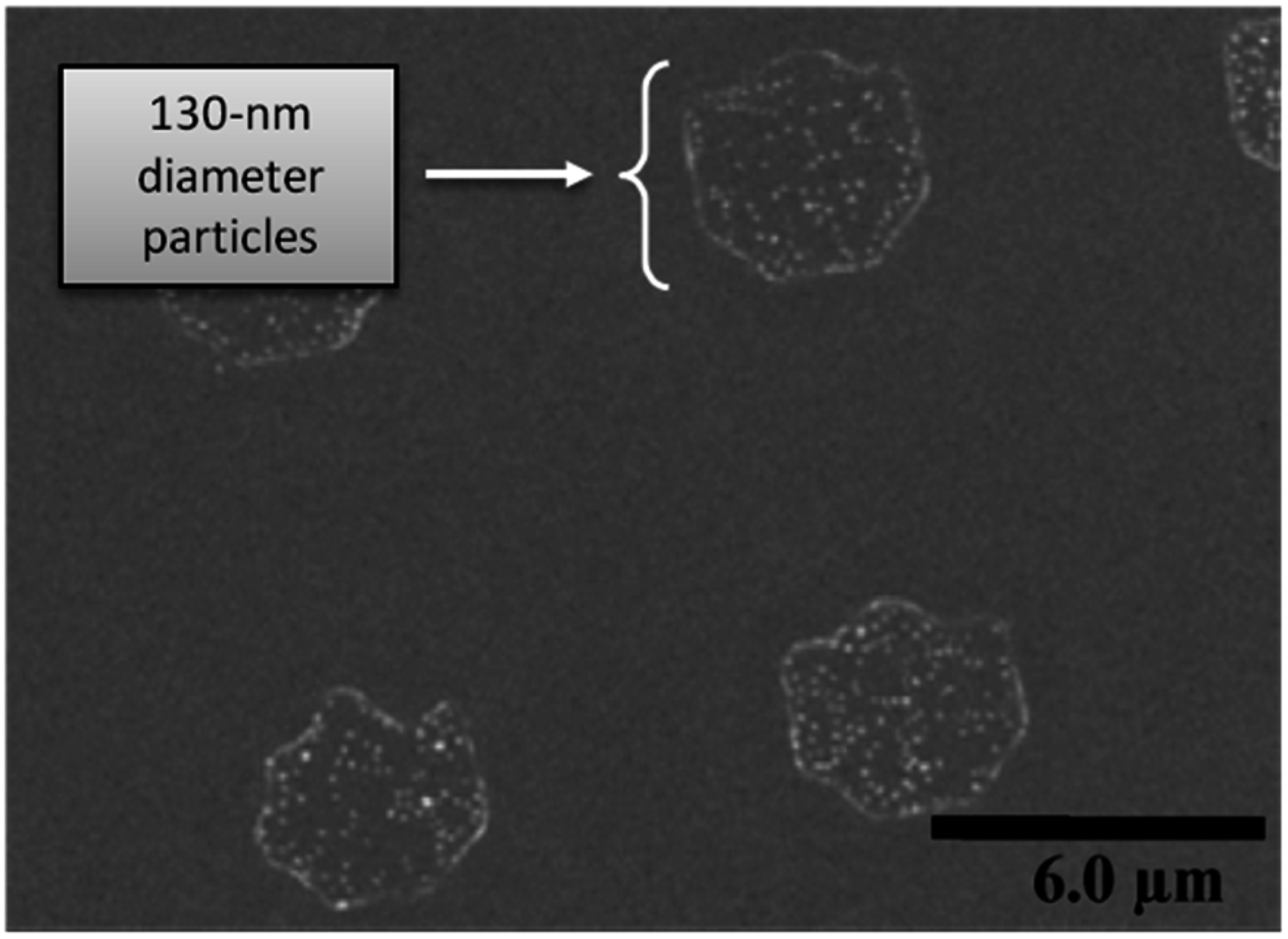
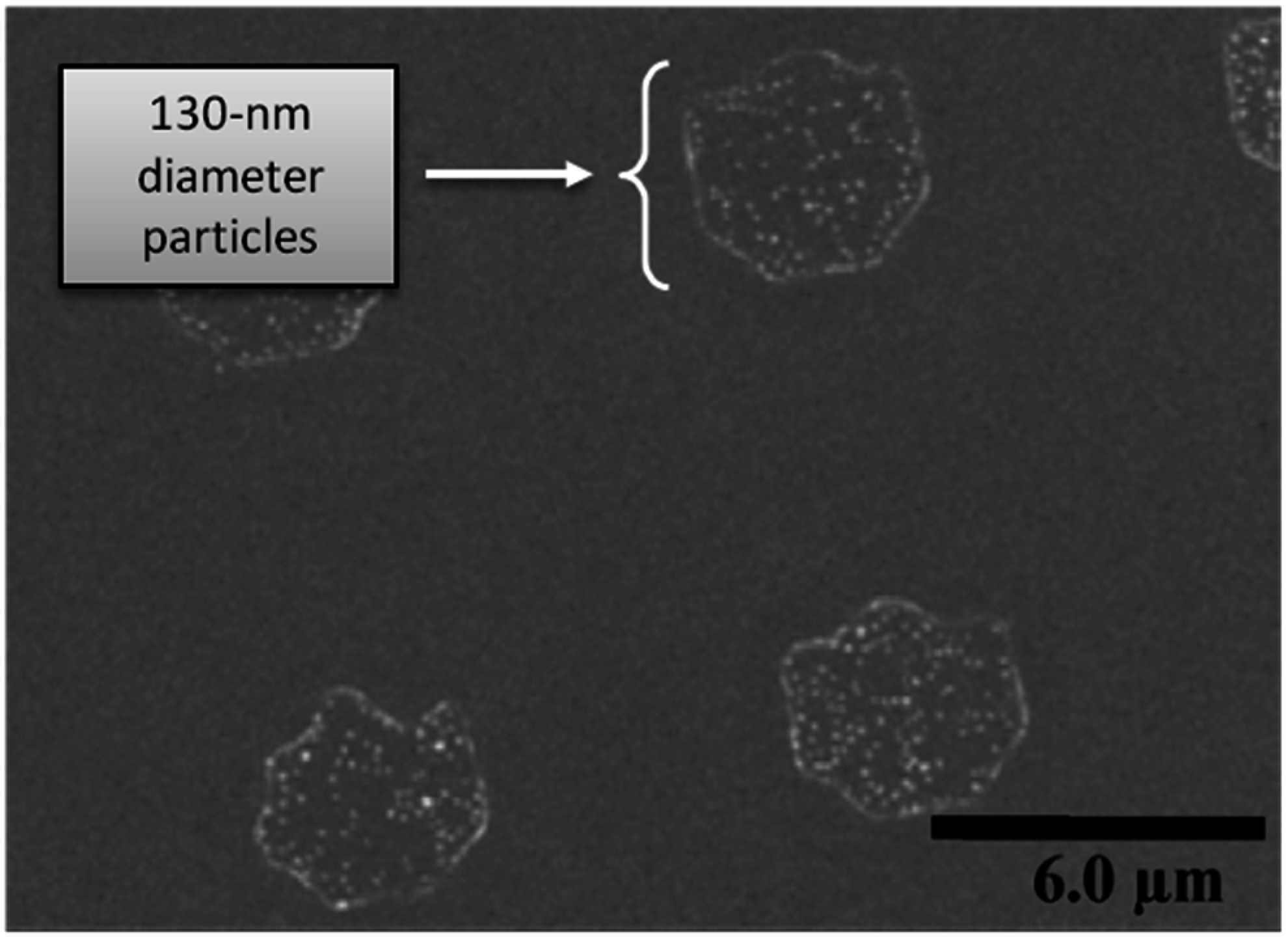
Figure 5 shows a scanning electron microscope image of the 130-nm diameter superparamagnetic beads (Nanomag-D; magnetization 43 emu/g) on the silicon substrate using the method described above. The nano-sized particles were immobilized selectively on the surface.
Figure 5.
Scanning electron microscope image of immobilized 130-nm diameter magnetic particles selectively on the surface of silicon substrate. Adapted from [
8].
Figure 5.
Scanning electron microscope image of immobilized 130-nm diameter magnetic particles selectively on the surface of silicon substrate. Adapted from [
8].
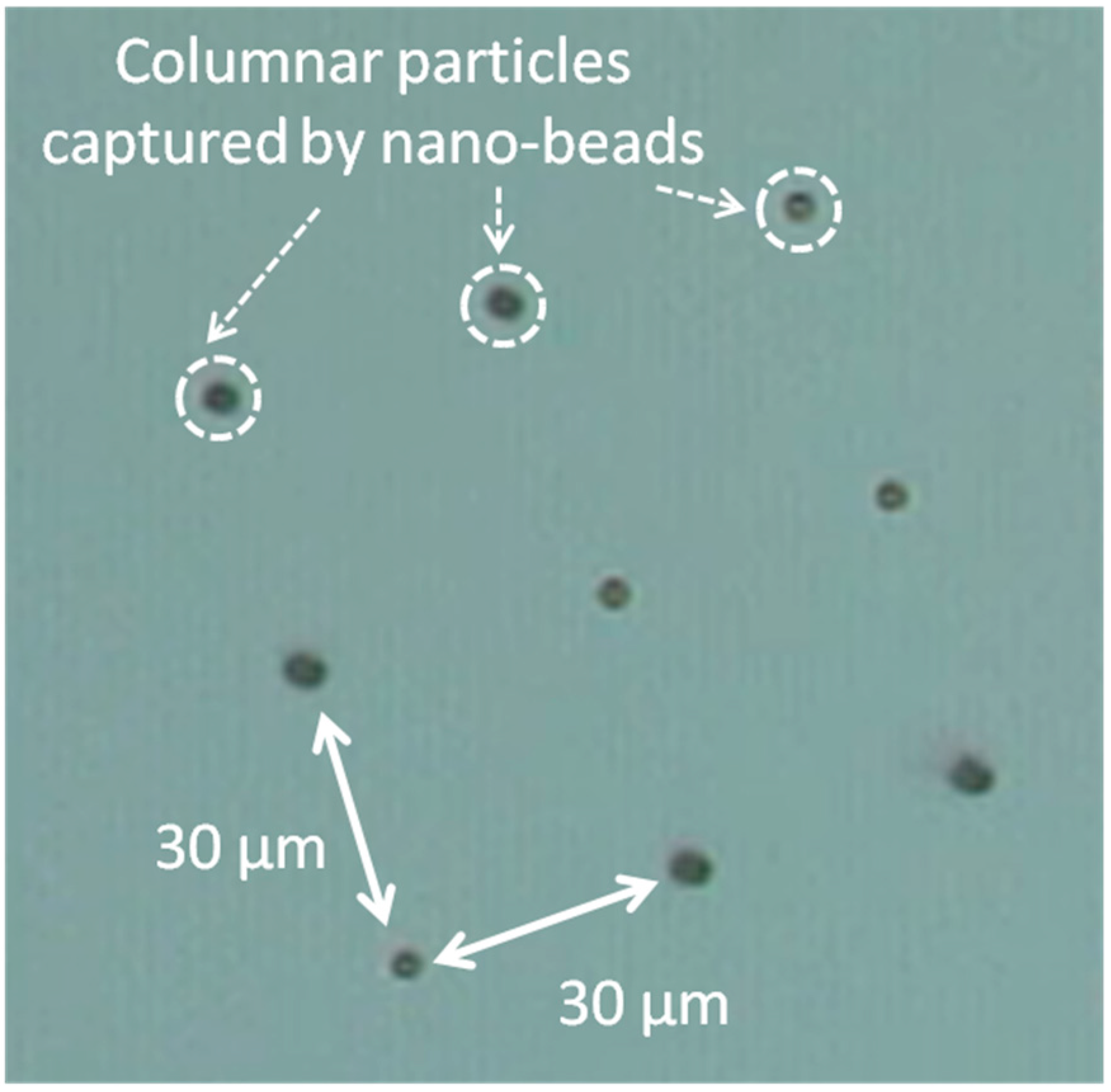
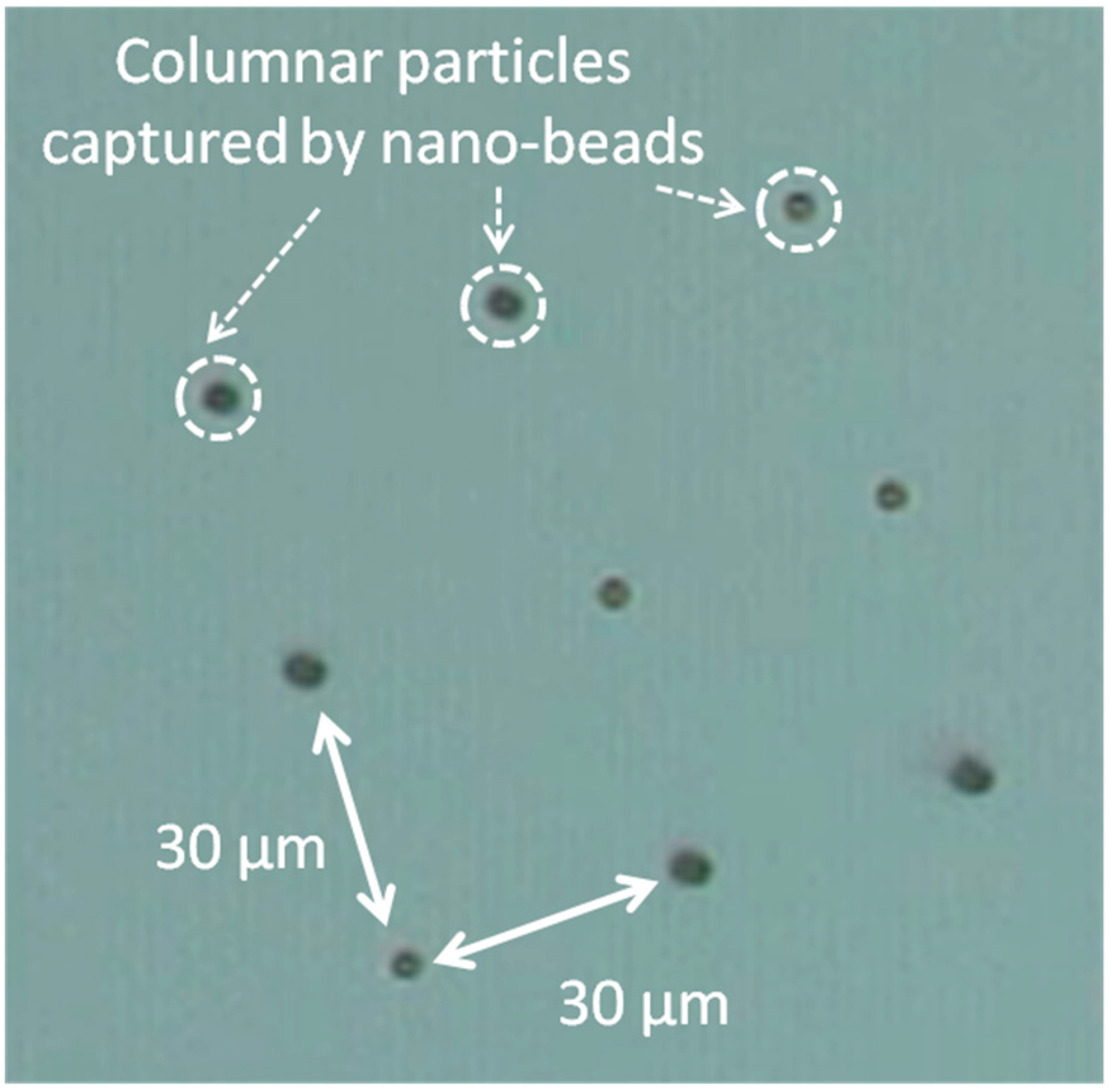
Figure 6 shows the 2.8-μm diameter columnar particles captured magnetically by the nano-sized particles on the substrate. It can be clearly seen that the columnar particles were only captured on the partial regions on which nano-sized magnetic particles were immobilized. Furthermore, we also successfully immobilized 200-nm diameter nano-sized particles (synthesized by Nishio
et al. as described in [
15]) on gold surface via a sulphur mediated interaction, and similarly the immobilized nano-particles were detected by columnar particle. An estimation of the minimum number of nano-sized particles was carried out; in the case of the columnar beads, this was 1.0 μm and 2.8 μm. From the experiment, at least four and 12 nano-sized particles were detected by 1.0 μm and 2.8 μm diameter columnar particles, respectively.
Figure 6.
Optical microscope image of columnar particles magnetically captured by nano-sized particles immobilized on the surface of the substrate. Adapted from [
8].
Figure 6.
Optical microscope image of columnar particles magnetically captured by nano-sized particles immobilized on the surface of the substrate. Adapted from [
8].
Further, 8-nm-diameter magnetic particles were detected by a similar method [
9]. The difference was in utilizing a hand-made coil instead of a permanent magnet to apply the magnetic field. The maximum magnetic field generated by the coil was 100 Oe. The immobilization process was also different; the surfaces of the target nano-sized particles were functionalized with thiol groups. These have an affinity to gold, and the target particle can be immobilized via the reaction.
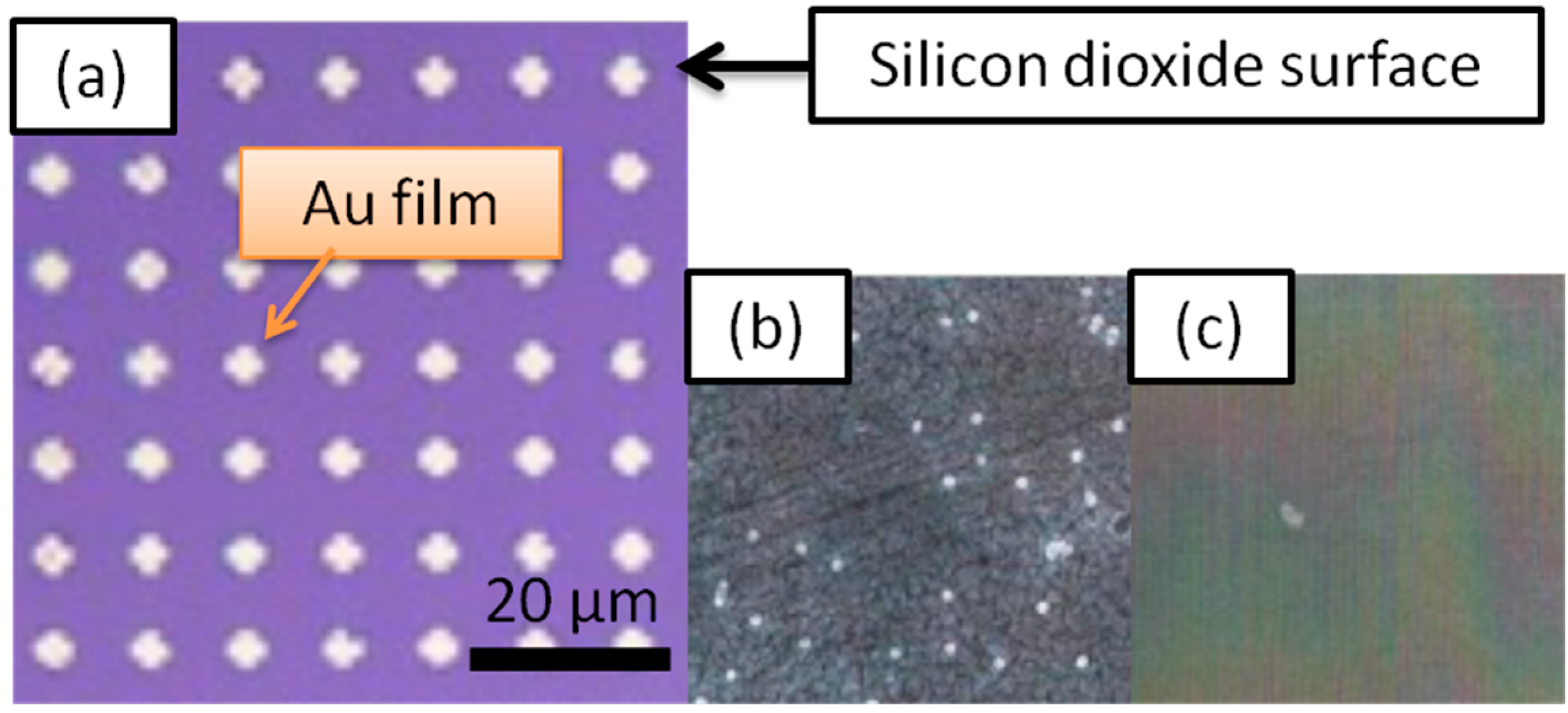
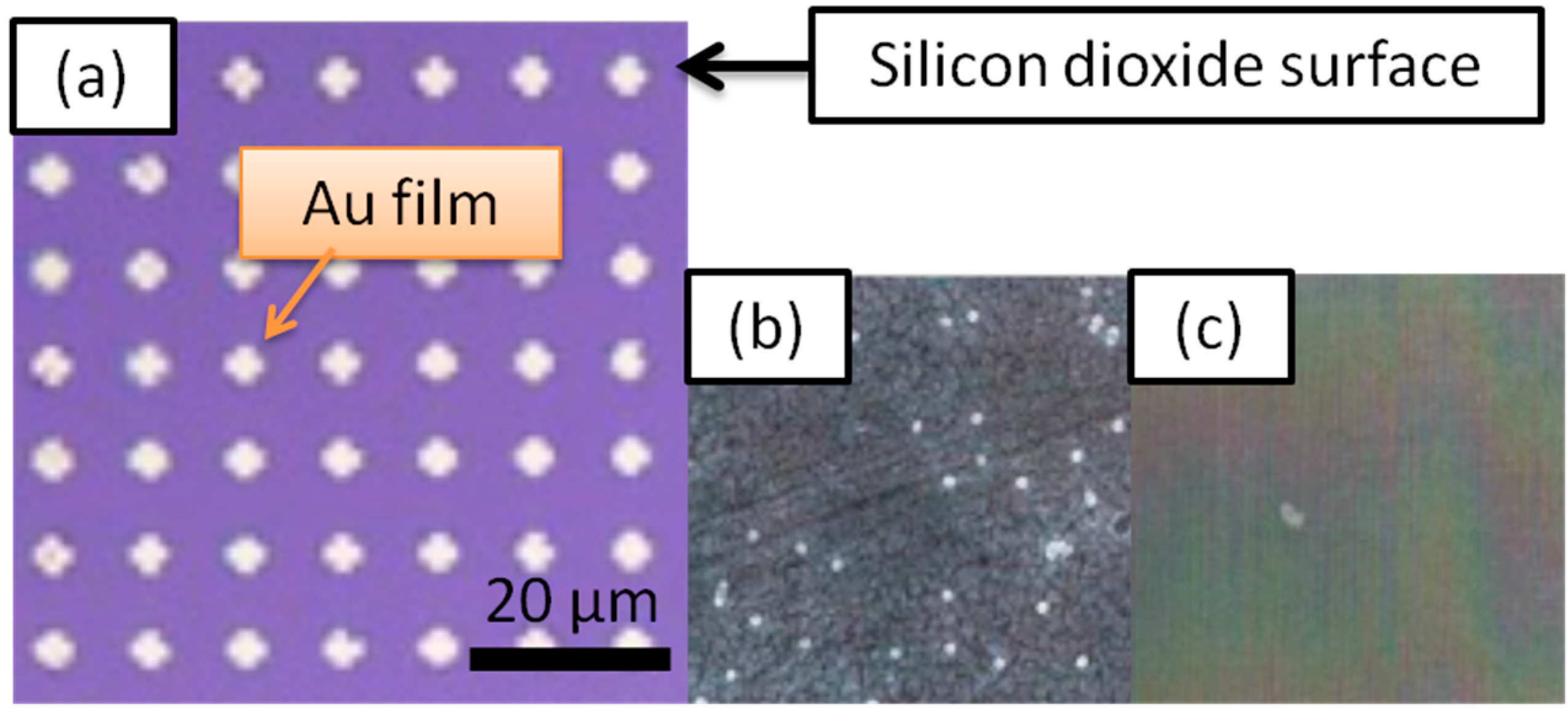
Figure 7 shows the result of the immobilization of the 8-nm-diameter magnetic particles on the gold surface.
Figure 7.
(
a) Optical microscope image of 5 μm × 5 μm gold arrays produced on a silicon dioxide surface; (
b) Scanning electron microscope image of 8 nm diameter thiolated superparamagnetic “target” beads immobilized via chemical affinity between the gold surface and sulfur attached to the 8 nm magnetic beads. In (
c) SPBs were not immobilized onto SiO
2 regions. Adapted from [
9].
Figure 7.
(
a) Optical microscope image of 5 μm × 5 μm gold arrays produced on a silicon dioxide surface; (
b) Scanning electron microscope image of 8 nm diameter thiolated superparamagnetic “target” beads immobilized via chemical affinity between the gold surface and sulfur attached to the 8 nm magnetic beads. In (
c) SPBs were not immobilized onto SiO
2 regions. Adapted from [
9].
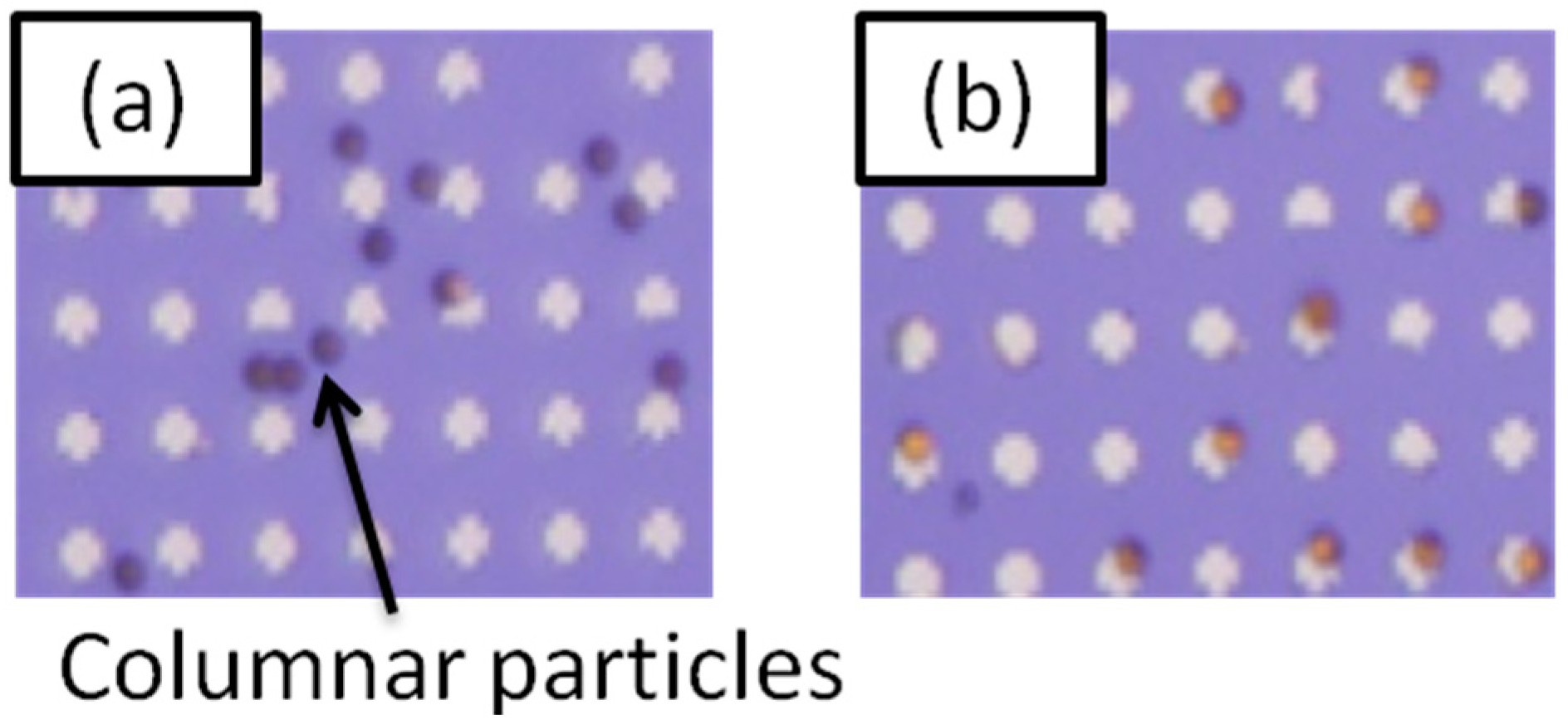
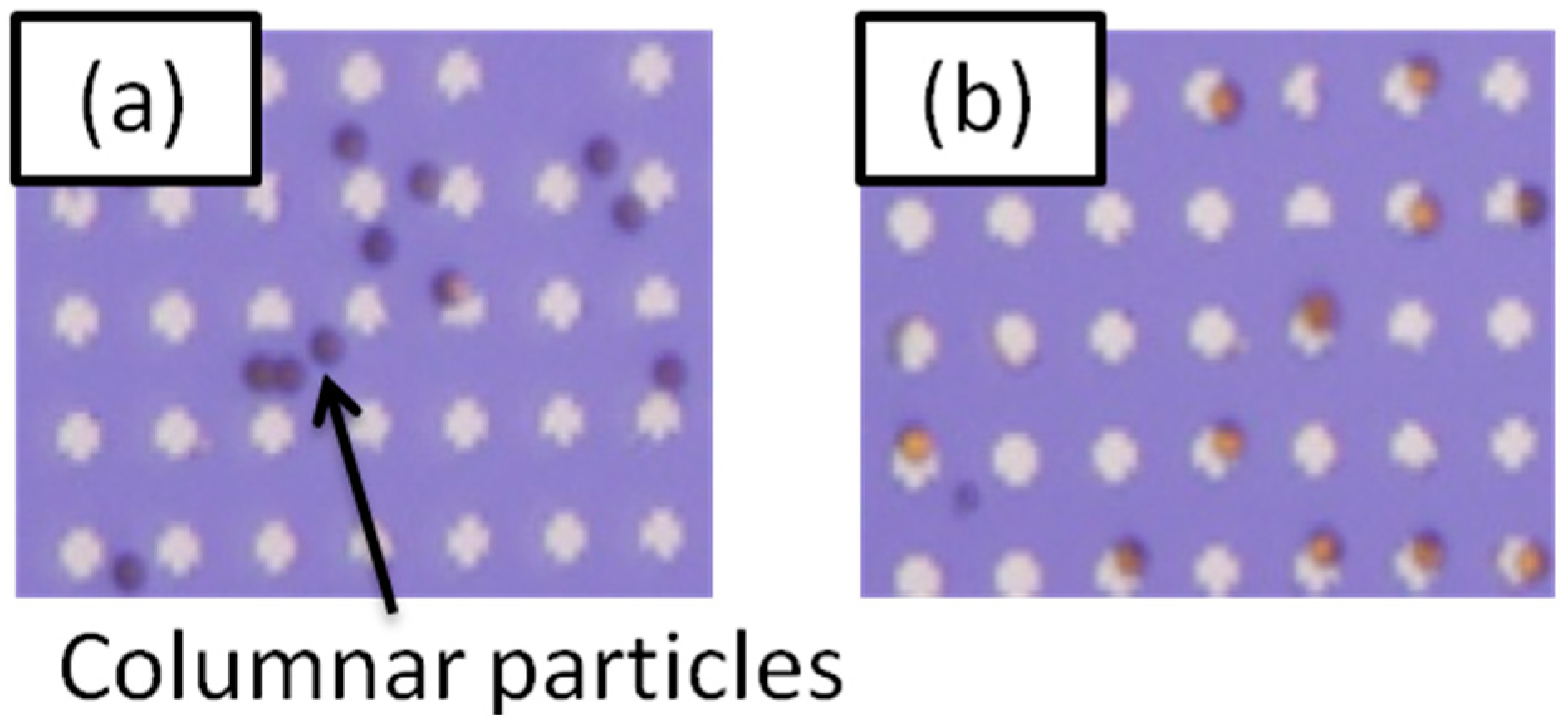
Figure 8 shows the result of 8-nm-diameter magnetic particle detection by columnar beads. The intensity of the applied magnetic field was 37 Oe. It is clearly seen that columnar beads were gathered on the gold surface after applying the field. We also investigated the time of the detection and more than 80% of columnar-beads were self-assembled onto the gold arrays within 10 s during the application of the external magnetic field. These results show our method has much potential for the development of a highly sensitive, high-speed and low cost medical diagnosis system.
Figure 8.
(
a) Optical microscope image of the random distribution of columnar-beads onto gold arrays in the absence of an external magnetic field; (
b) distribution of the columnar-beads after application of an external magnetic field of 37 Oe. Adapted from [
9].
Figure 8.
(
a) Optical microscope image of the random distribution of columnar-beads onto gold arrays in the absence of an external magnetic field; (
b) distribution of the columnar-beads after application of an external magnetic field of 37 Oe. Adapted from [
9].
3.2. The Amplification of the Magnetic Signal by Magnetically-Assembled Columnar Particles
We also investigated the amplification of the magnetic signal by columnar particles from the Hall-effect device measurement in DC magnetic field [
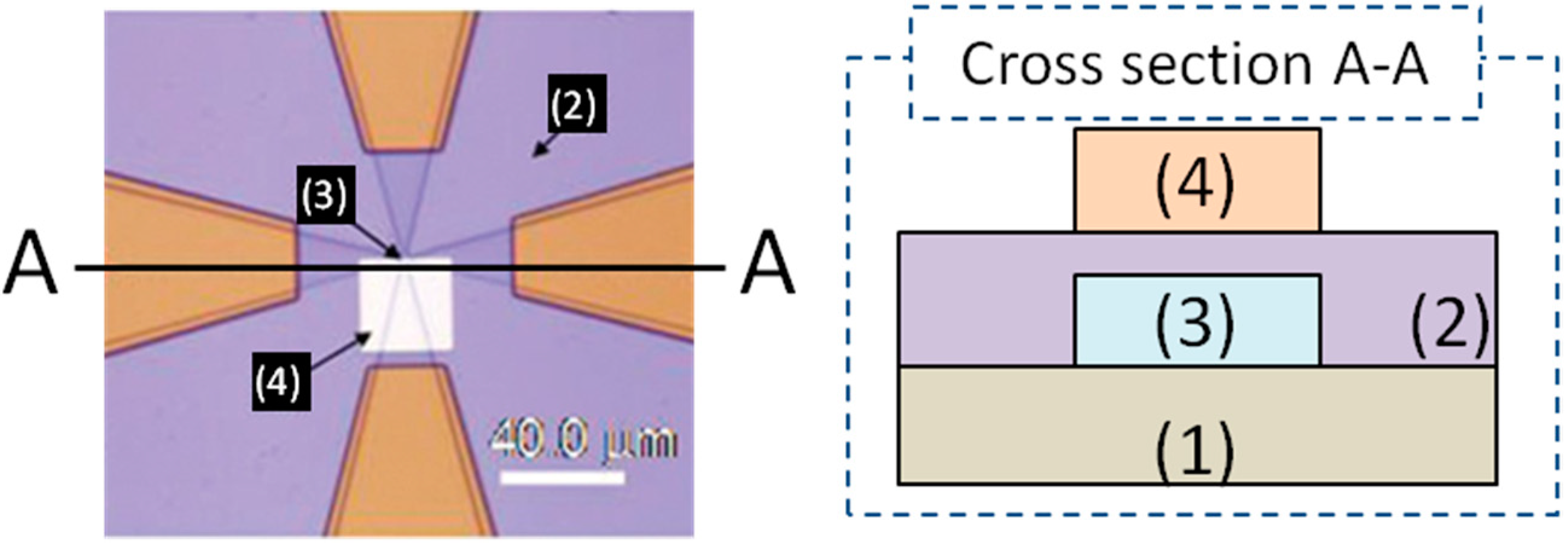
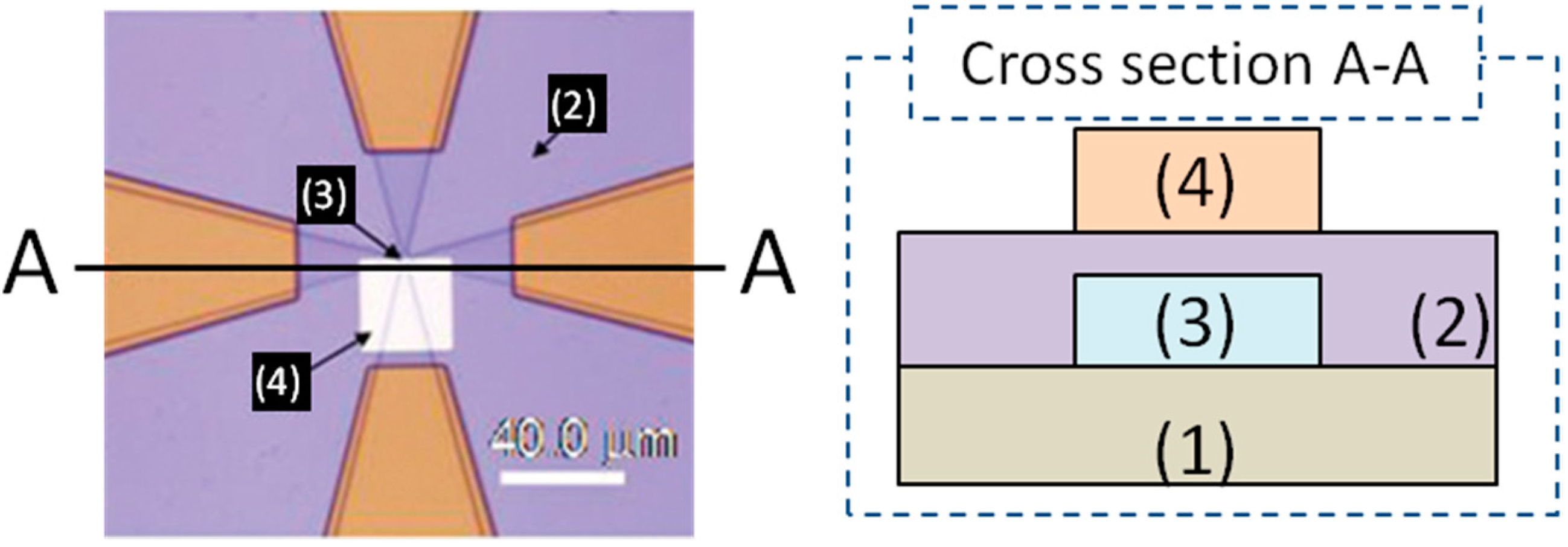
10]. The configuration of the Hall sensor is described in
Figure 9. Gold substrate was deposited on the center of the Hall device to immobilize the target nano-sized particles. The immobilization method was slightly different compared to our report. In this experiment, the device was dipped in cystamine dihydrochloride solution, (SCH
2CH
2NH
2)
22HCl (>98%), at room temperature for 8 h to form an amine-terminated layer on the gold surface. Carboxyl-terminated nano-sized 130-nm-diameter beads were immobilized on the gold surface as target particles.
Figure 9.
Schematic composite structure of a micro-Hall effect device. (
1) GaAs (001) substrate; (
2) silicon nitride insulating layers; (
3) AlGaAs/InGaAs/GaAs Hall effect devices active layer; (
4) Au/Ti interface layer for immobilization of functionalized nano-sized magnetic beads comparable to actual biomolecules. Adapted from [
10]
Figure 9.
Schematic composite structure of a micro-Hall effect device. (
1) GaAs (001) substrate; (
2) silicon nitride insulating layers; (
3) AlGaAs/InGaAs/GaAs Hall effect devices active layer; (
4) Au/Ti interface layer for immobilization of functionalized nano-sized magnetic beads comparable to actual biomolecules. Adapted from [
10]
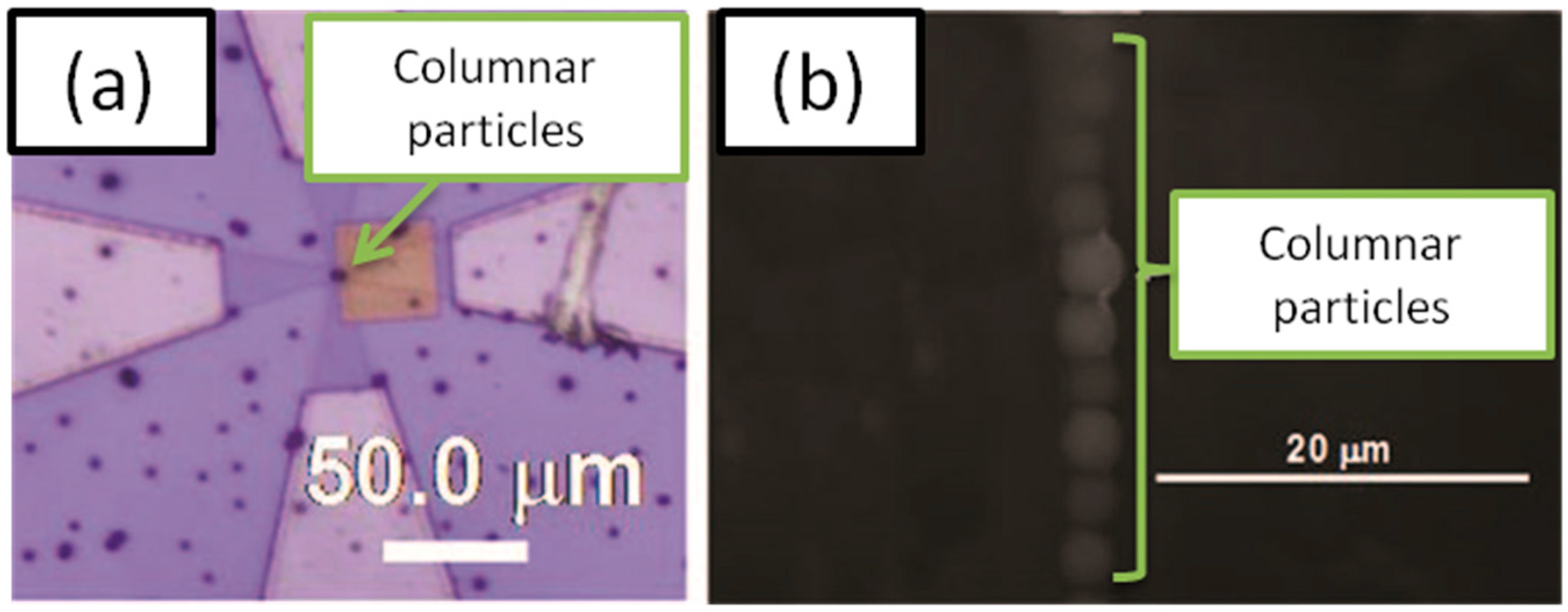
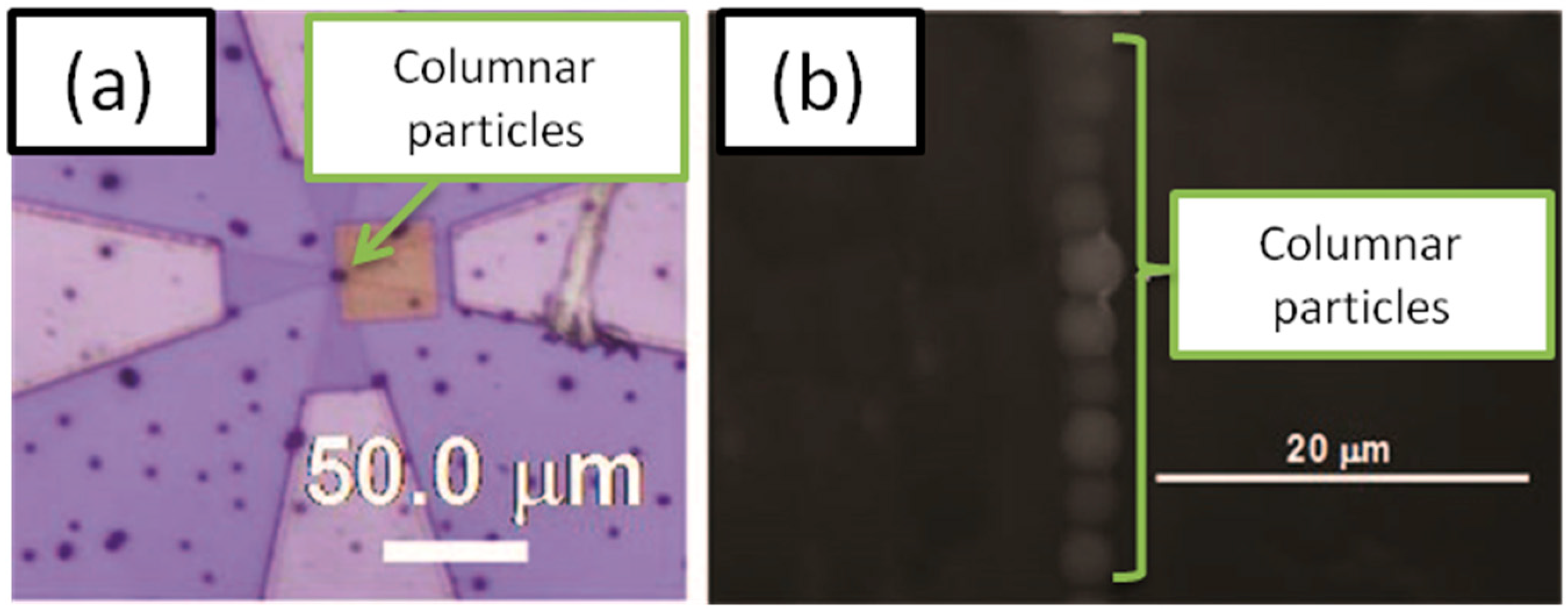
Figure 10a shows the self-assembled micro-sized particles on the center of the Hall sensor on which a gold layer was deposited for immobilizing nano-sized target particles. The manipulation of columnar particle was carried out by permanent magnet to move the center of Hall sensor. To investigate the amplification effect, the columnar beads were dispersed in photocurable resin [
16] and dropped on the sensor surface where they were magnetically captured by the target particle. The sensor was exposed to ultraviolet light in order to solidify the resin and keep the self-assembled configuration.
Figure 10b shows the scanning electron microscope image of magnetically captured columnar particles onto the gold substrate in solidified resin. As expected, chainlike assembled columnar particles were observed.
Figure 10.
(
a) Application of the external magnetic field gradient to form the vertical aligned self-assembled structure with respect to the surface; (
b) The chainlike self-assembly of micro-SPBs in solidified polymer matrix observed by SEM. Adapted from [
10].
Figure 10.
(
a) Application of the external magnetic field gradient to form the vertical aligned self-assembled structure with respect to the surface; (
b) The chainlike self-assembly of micro-SPBs in solidified polymer matrix observed by SEM. Adapted from [
10].
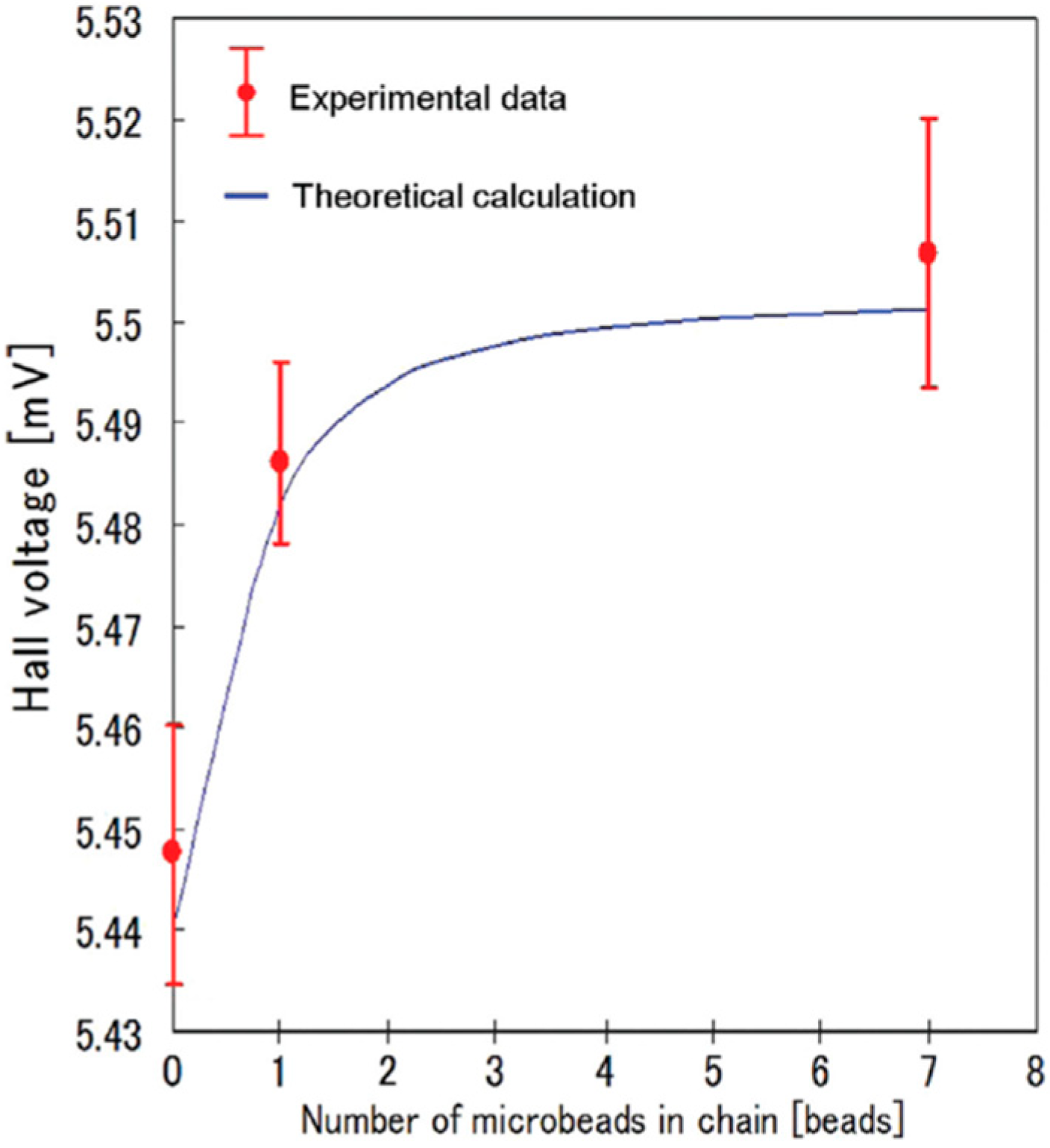
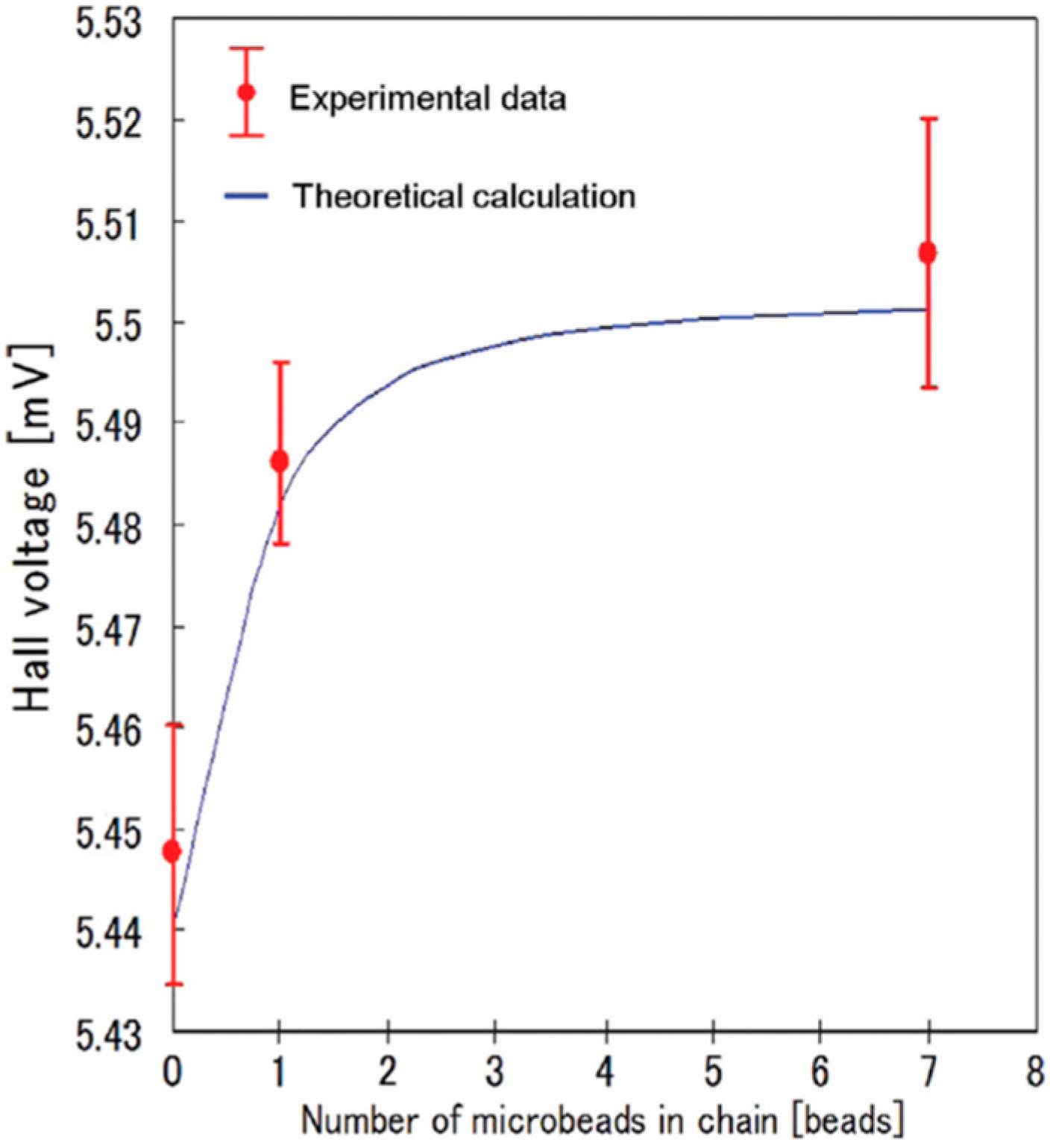
Figure 11 is a graph showing the experimental and simulation output voltage of Hall sensor
vs. the number of columnar beads with an external magnetic field of 800 Oe applied perpendicular to the sensor surface. The output was obviously increased by columnar particles and this method shows promise for detecting low concentration target nano-sized particles.
Figure 11.
Hall voltage related to chains of self-assembled micro-SPBs bound to sensor. Data points: mean; error bars: standard deviation (
n = 20) Adapted from [
10].
Figure 11.
Hall voltage related to chains of self-assembled micro-SPBs bound to sensor. Data points: mean; error bars: standard deviation (
n = 20) Adapted from [
10].
3.3. The Investigation of Magnetic Self-Assembly Detection in Micro Channel
For the rapid and efficient handling of small amounts of analyte, both micro-fluidic devices and bio-sensing are powerful tools, especially for point-of-care testing. To meet such a demand, we also investigated the use of our novel detection method in micro fluidic devices. More specifically, our detection method was carried out in micro channel made from poly-dimethylsiloxane (PDMS) [
11].
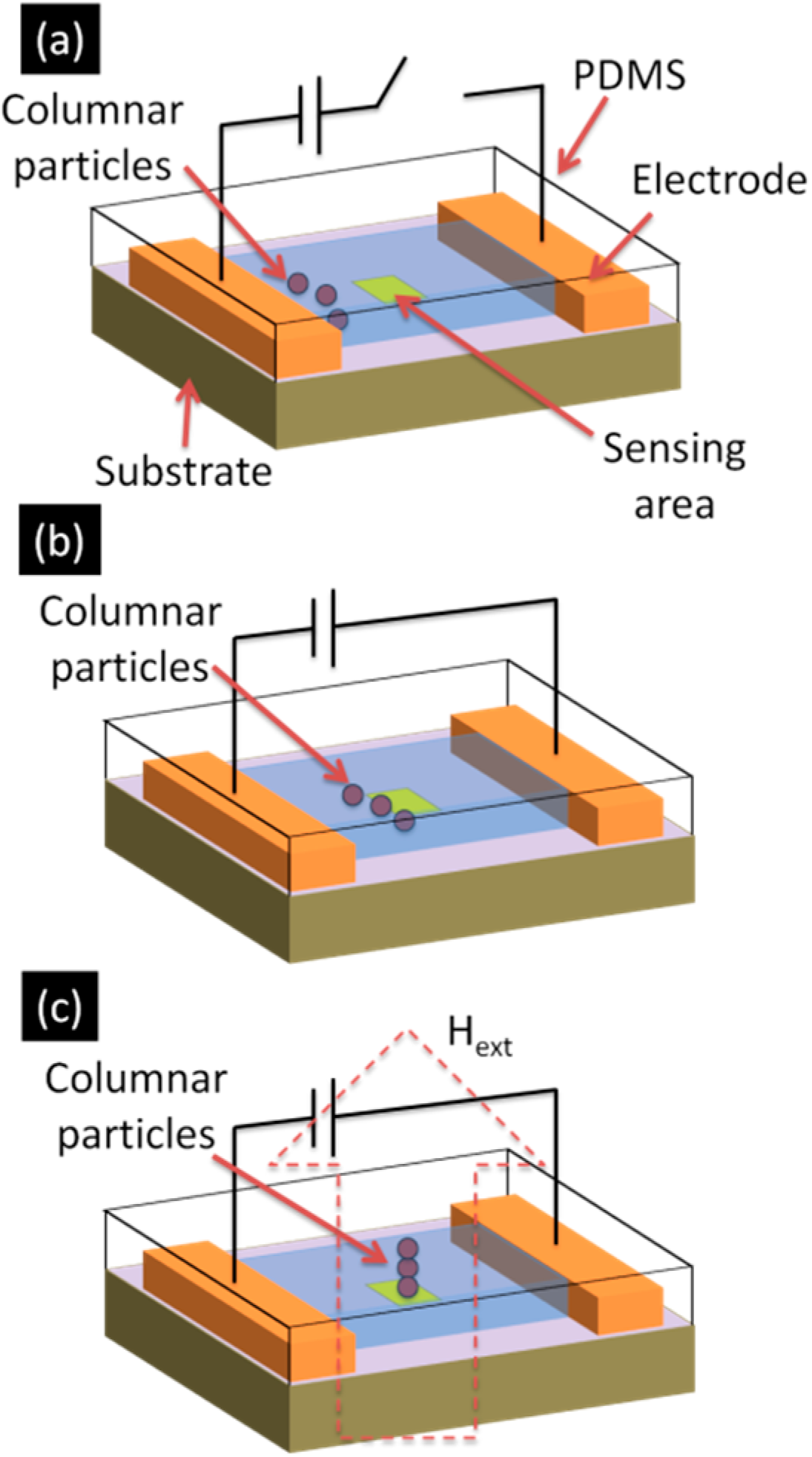
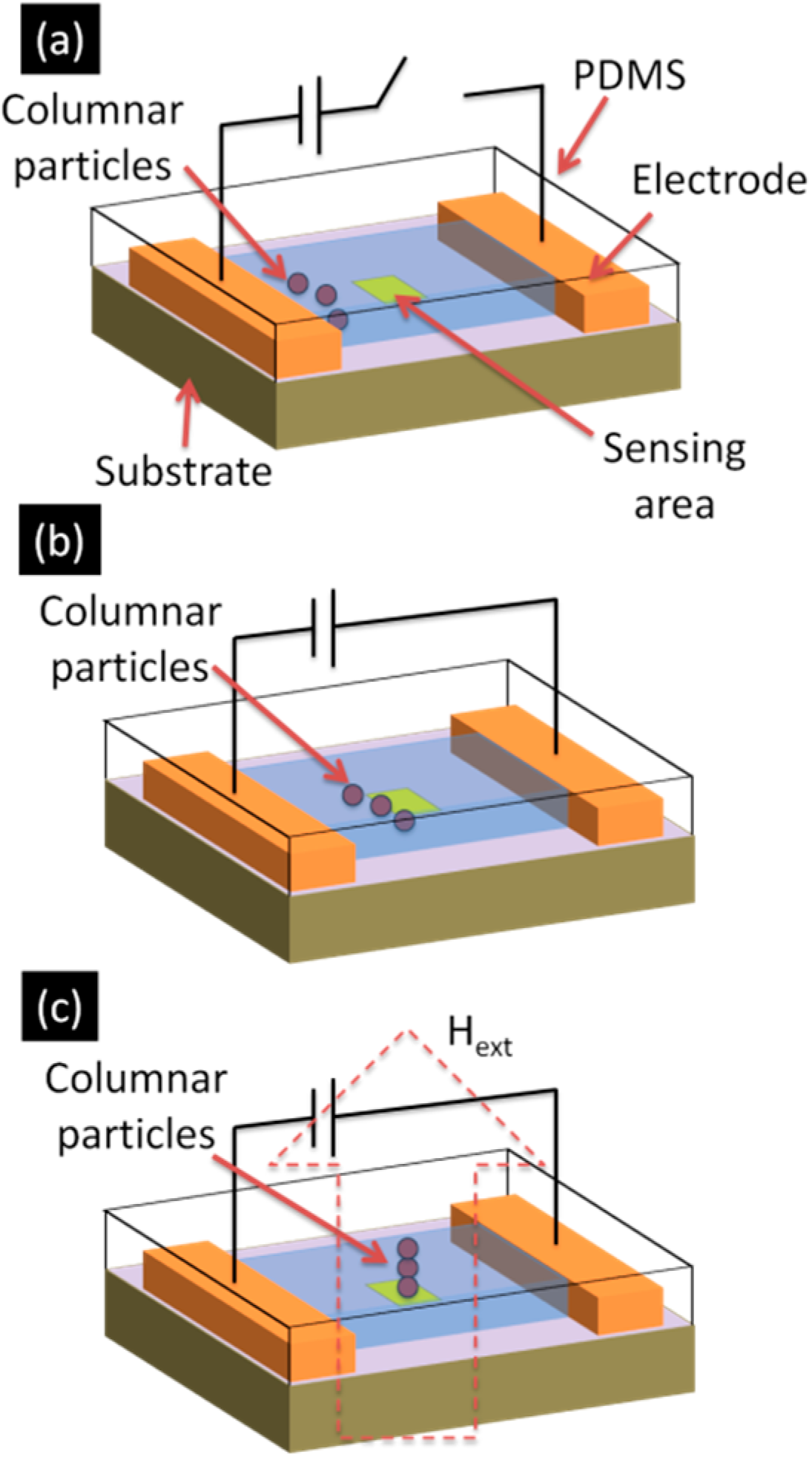
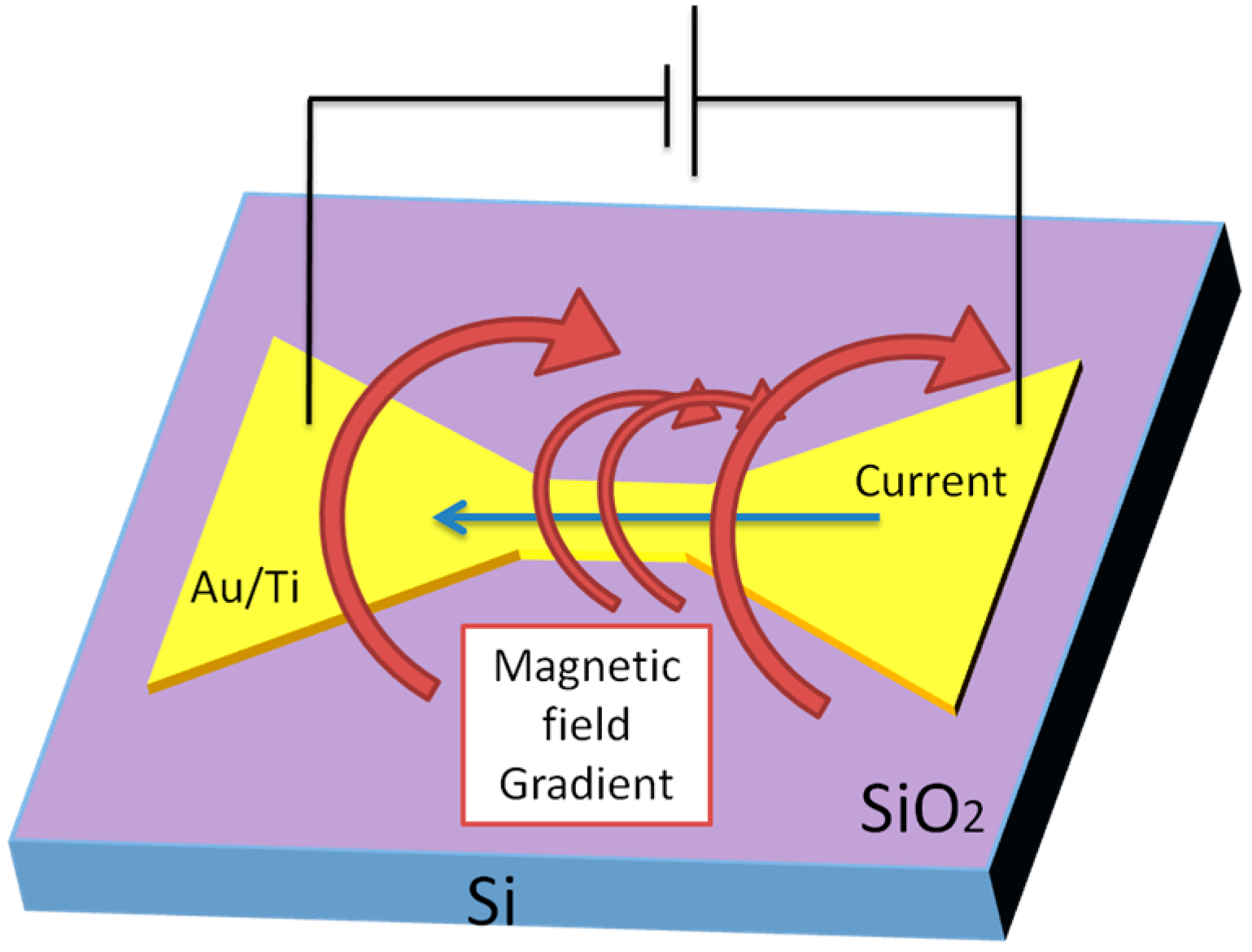
Figure 12 is a schematic image showing how to detect nano-sized magnetic target particles in PDMS micro-channel. The unique feature of our system is that it utilizes electrostatic manipulation of columnar particles instead of an external pump. Typically, pressure-driven micro fluidic systems are often large and lack portability, which is not suitable for point-of-care testing. In our system, columnar particles, on which the carboxyl group are functionalized and have negative charges in aqueous solution, are manipulated by an electric field induced in the channel by applied voltage between the electrodes created on the edges of the channel as shown in
Figure 12a. Followed by the electrostatic manipulation of columnar particles on the sensing area where target nano-sized particles were immobilized as shown in
Figure 12b, magnetic self-assembly of columnar particles was induced by an external magnetic field from an electro magnet coil as shown in
Figure 12c.
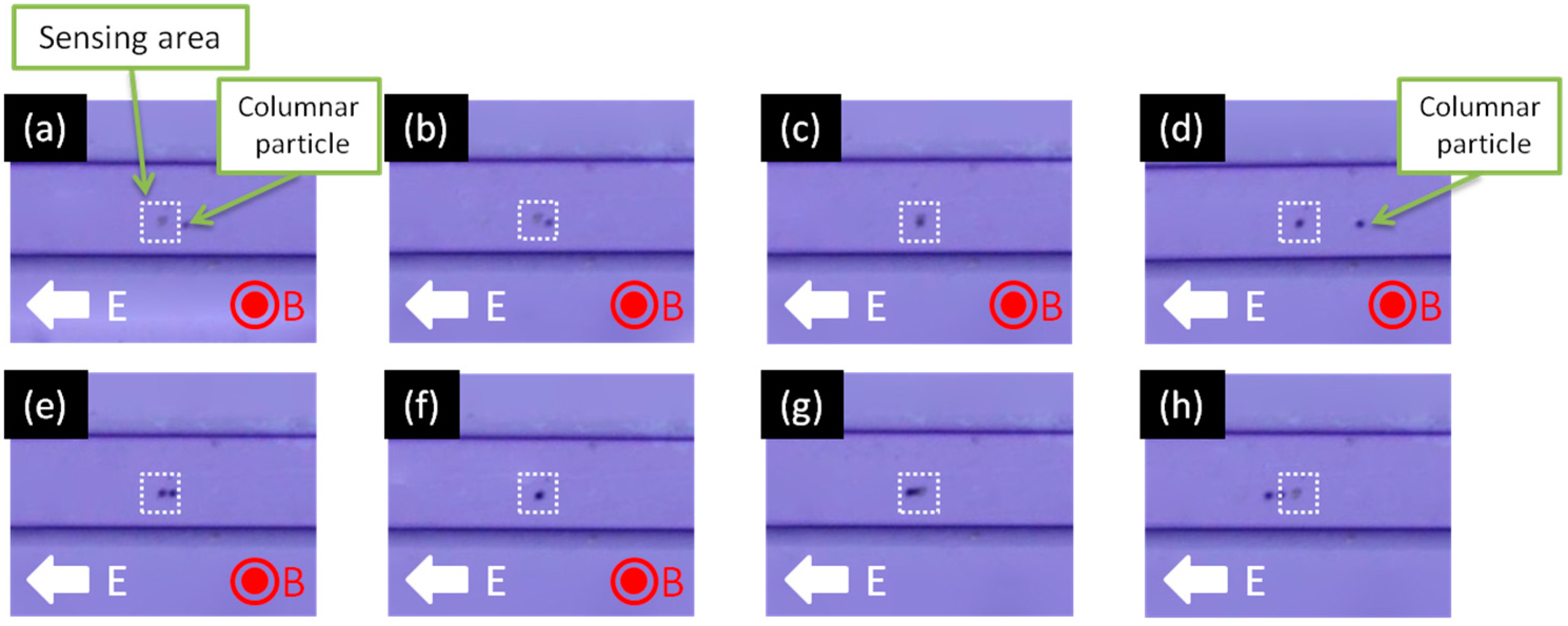
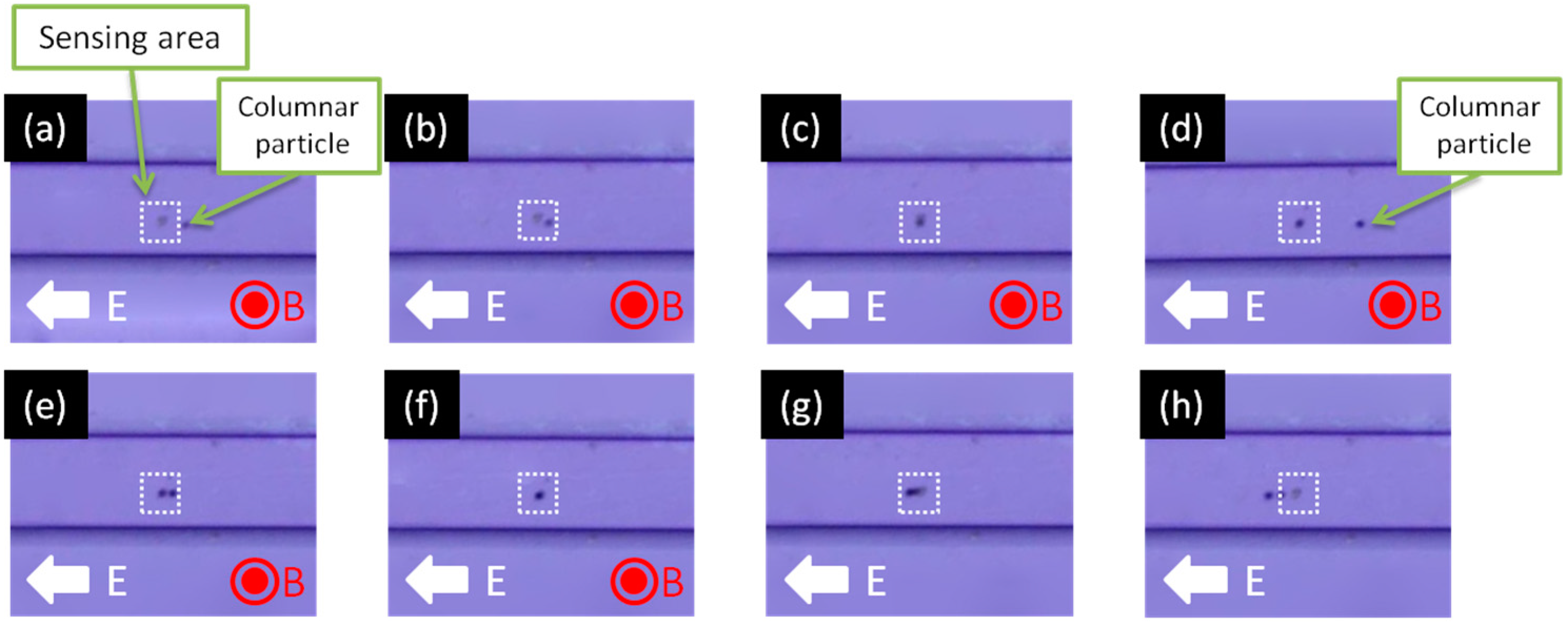
Figure 13a–h show a series of images taken with an optical microscope showing 2.8-μm-diameter superparamagnetic columnar particles being manipulated by the electric field in microchannels. They are seen to self-assemble on a spot onto which the 130-nm-diameter target beads are immobilized in the application of the external magnetic field, before starting to flow through the microchannels in the absence of the external magnetic field due to the electric force acting on the columnar beads. This result indicates pump-less manipulation of columnar particles was successfully carried out and our method is achievable in microfluidic devices.
The results from these experiments demonstrate the potential for developing a highly sensitive, high-speed and low cost medical diagnosis system.
Figure 12.
(
a) An aqueous solution containing superparamagnetic micrometer size columnar beads was dropped into one of reservoirs; (
b) An electric field was applied across the channels to manipulate the columnar beads; (
c) The external magnetic field was applied to the microfluidic chip to detect the 130-nm-diameter target beads immobilized on the surface of channels. Adapted from [
11].
Figure 12.
(
a) An aqueous solution containing superparamagnetic micrometer size columnar beads was dropped into one of reservoirs; (
b) An electric field was applied across the channels to manipulate the columnar beads; (
c) The external magnetic field was applied to the microfluidic chip to detect the 130-nm-diameter target beads immobilized on the surface of channels. Adapted from [
11].
Figure 13.
(
a–
h) Sequence optical images of electrostatic manipulation movement of columnar particles in micro channel filled with aqueous solution and detection of 130 nm diameter target particles via magnetically induced self-assembly of columnar particles. (
a,
b) Movement of a single 2.8 μm diameter magnetic particle in the microchannel; (
c) The micrometer sized particle is magnetically captured by the immobilized target particles; (
d,
e) Another columnar particle is moved towards the location where the previous 2.8 μm diameter particle was captured; (
f) Another columnar particle self-assembles onto the previous bead. (
g,
h) Columnar particles begin to move through the microchannel again in the absence of an external magnetic field due to the electric force still acting on the columnar particles. Adapted from [
11].
Figure 13.
(
a–
h) Sequence optical images of electrostatic manipulation movement of columnar particles in micro channel filled with aqueous solution and detection of 130 nm diameter target particles via magnetically induced self-assembly of columnar particles. (
a,
b) Movement of a single 2.8 μm diameter magnetic particle in the microchannel; (
c) The micrometer sized particle is magnetically captured by the immobilized target particles; (
d,
e) Another columnar particle is moved towards the location where the previous 2.8 μm diameter particle was captured; (
f) Another columnar particle self-assembles onto the previous bead. (
g,
h) Columnar particles begin to move through the microchannel again in the absence of an external magnetic field due to the electric force still acting on the columnar particles. Adapted from [
11].


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}