
Matching the Best Viewing Angle in Depth Cameras for Biomass Estimation Based on Poplar Seedling Geometry


Abstract
:
1. Introduction
2. Materials and Methods
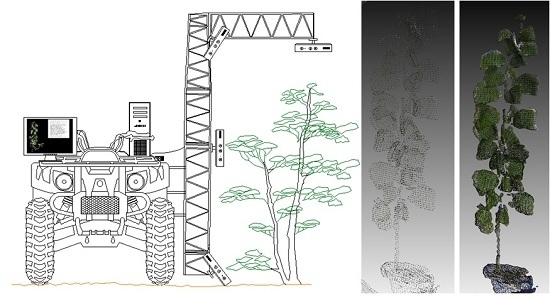
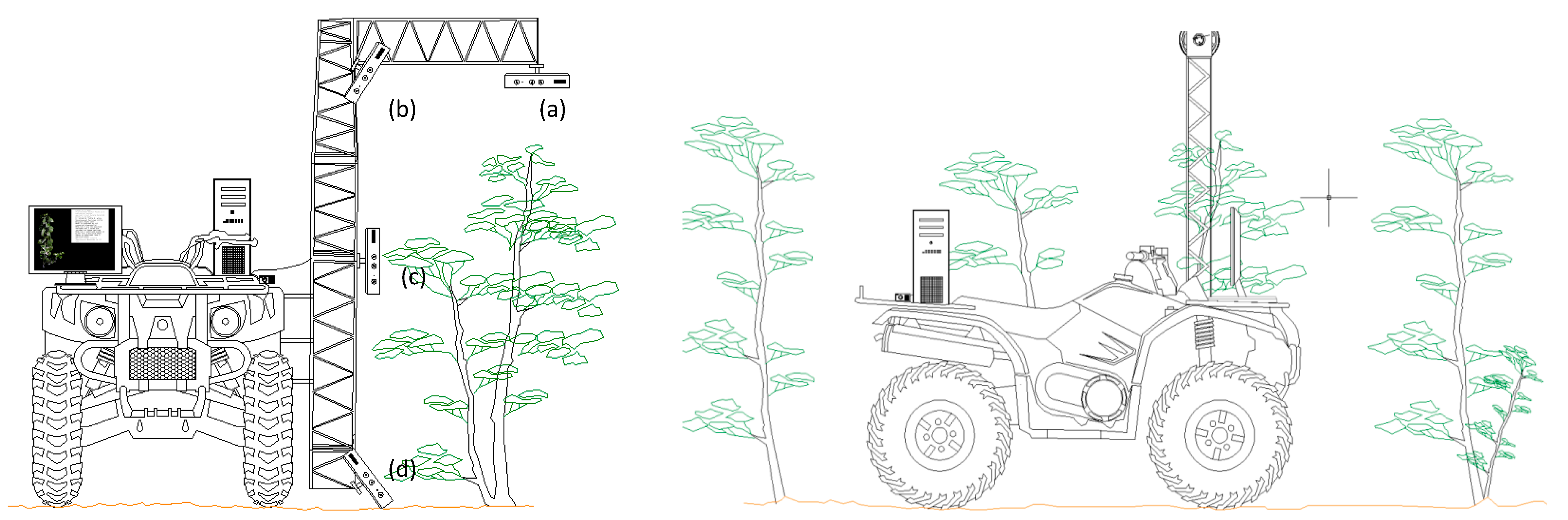
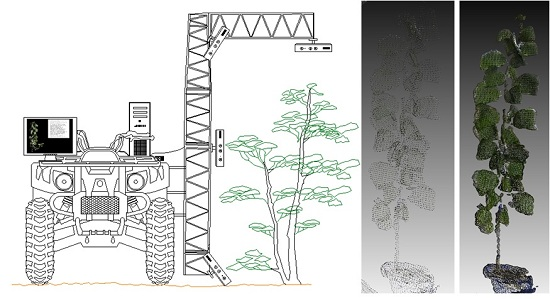
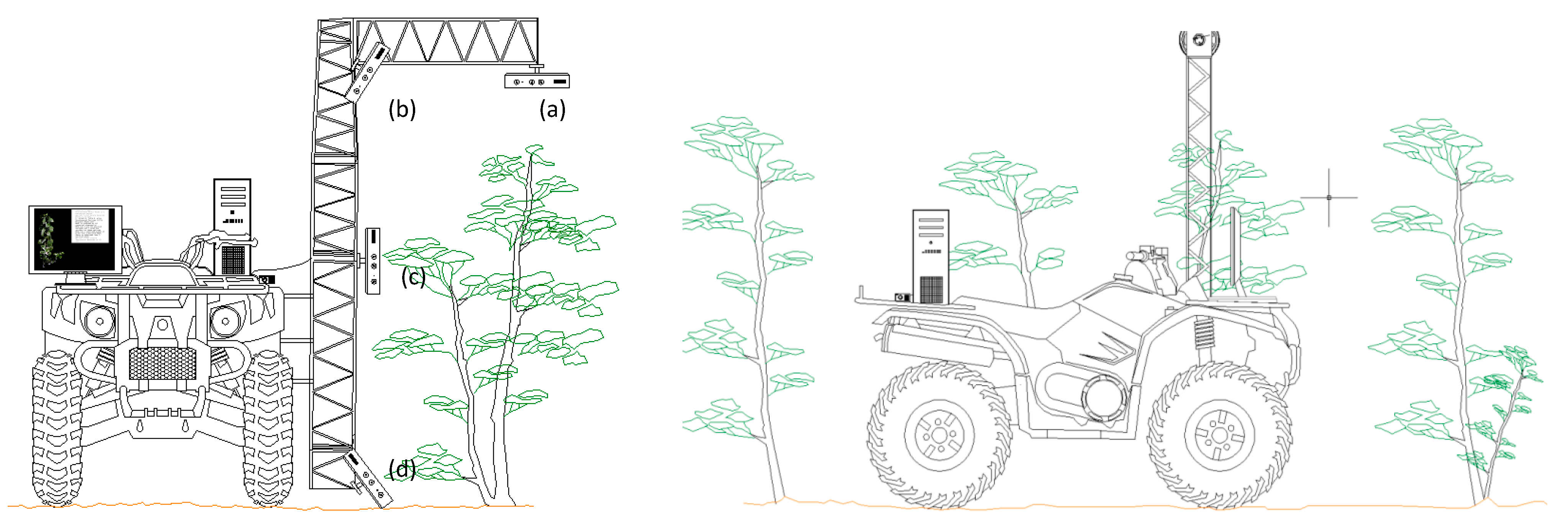
2.1. Sampling System
2.2. Site Study and Plant Measurements
2.2.1. One Year Old Plants
2.2.2. One Month Old Plants
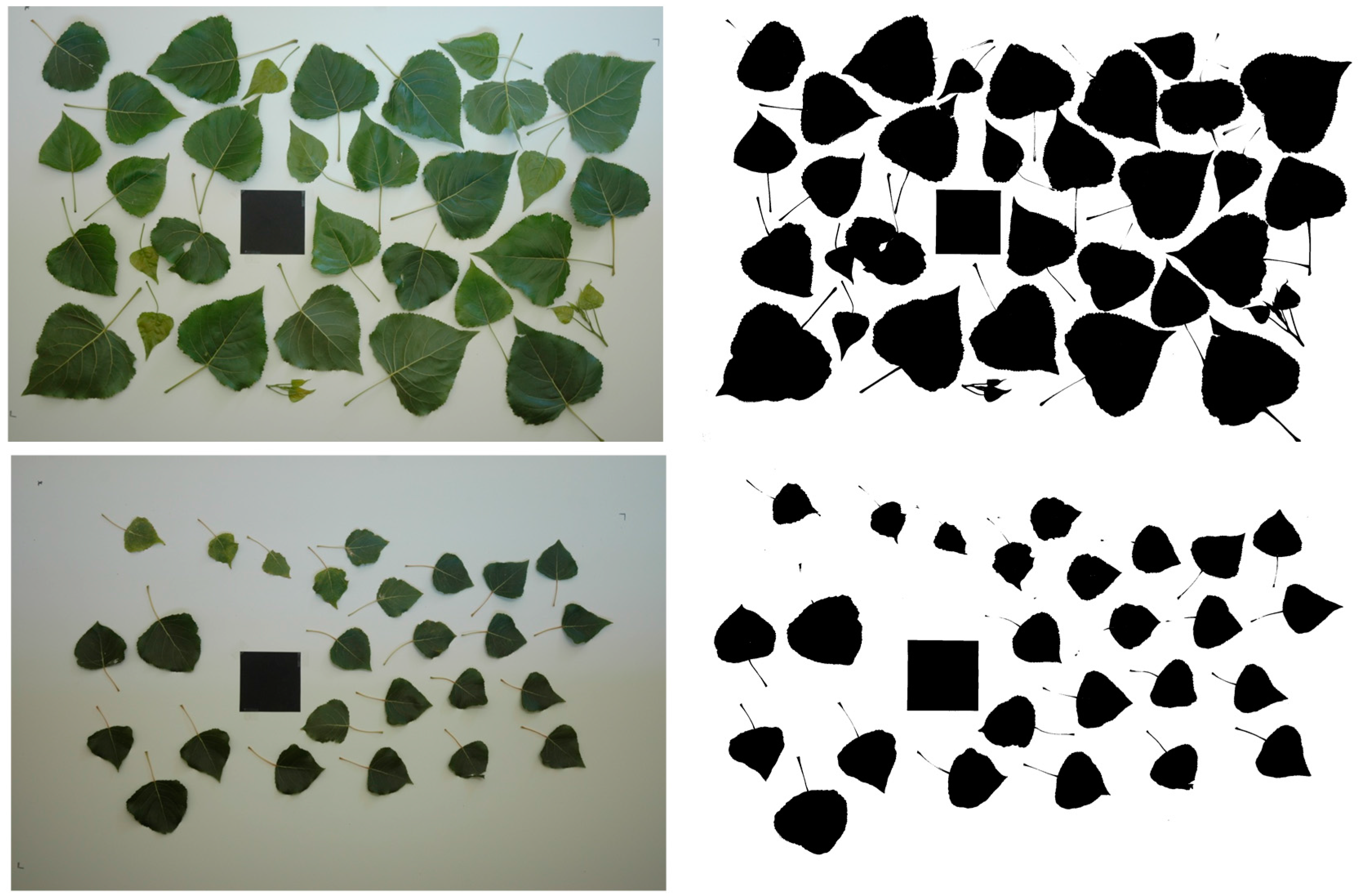
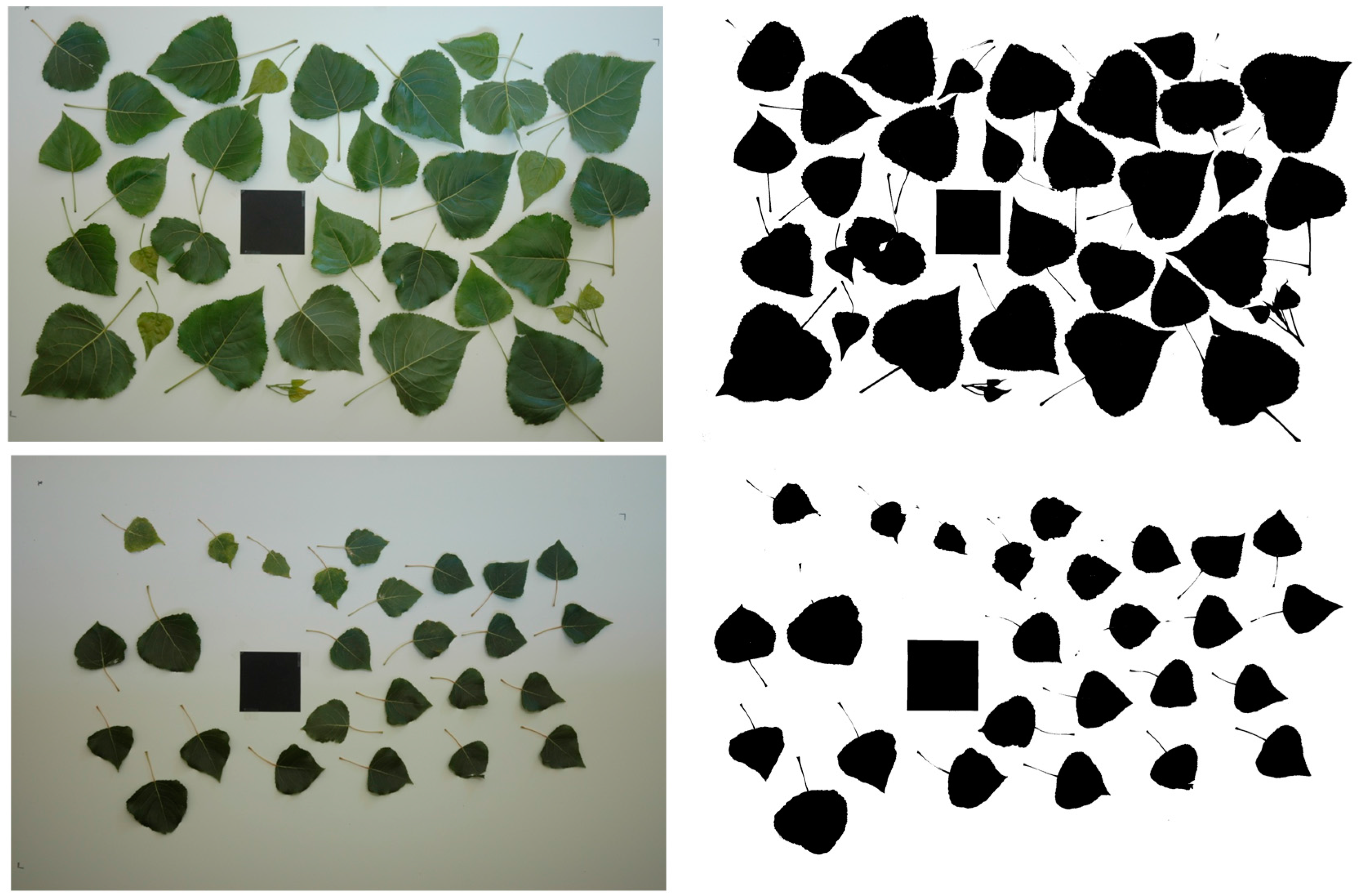
2.3. Data Processing
3. Results and Discussion
3.1. Relationship between Estimated and Actual Plant Parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Viewing Angle | Leaf Biomass | Branch Biomass | Leaf Area | Total Biomass | Height | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Top | Half Height | Base | Top | Half Height | Base | Top | Half Height | Base | Full Tree | ||
| 0° | 0.421 | 0.756 ** | −0.065 | −0.016 | 0.632 ** | −0.017 | 0.201 | 0.062 | −0.153 | 0.729 ** | 0.747 ** |
| 45° | 0.662 ** | 0.896 ** | 0.579 ** | 0.249 | 0.748 ** | 0.549 ** | 0.746 ** | 0.720 ** | 0.829 ** | 0.799 ** | 0.979 ** |
| 90° | 0.669 ** | 0.916 ** | 0.589 ** | 0.198 | 0.762 ** | 0.479 * | 0.625 * | 0.125 | 0.579 | 0.802 ** | 0.982 ** |
| −45° | 0.671 ** | 0.843 ** | 0.619 ** | 0.249 | 0.695 ** | 0.114 | 0.777 ** | 0.502 | 0.391 | 0.747 ** | 0.944 ** |
| Multiangle | 0.787 ** | 0.746 ** | 0.692 ** | 0.510 * | 0.737 ** | 0.650 ** | 0.779 * | 0.673 | 0.152 | 0.866 ** | 0.988 ** |
| Viewing Angle | Leaf Biomass | Branch Biomass | Total Biomass | Leaf Area | Height |
|---|---|---|---|---|---|
| 0° | 0.738 * | 0.051 | 0.663 | 0.891 ** | 0.923 ** |
| 45° | 0.260 | 0.568 | 0.368 | 0.343 | 0.940 ** |
| 90° | 0.010 | 0.849 ** | 0.215 | 0.011 | 0.944 ** |
| Multiangle | 0.759 * | 0.724 * | 0.845 * | 0.853 ** | 0.924 ** |
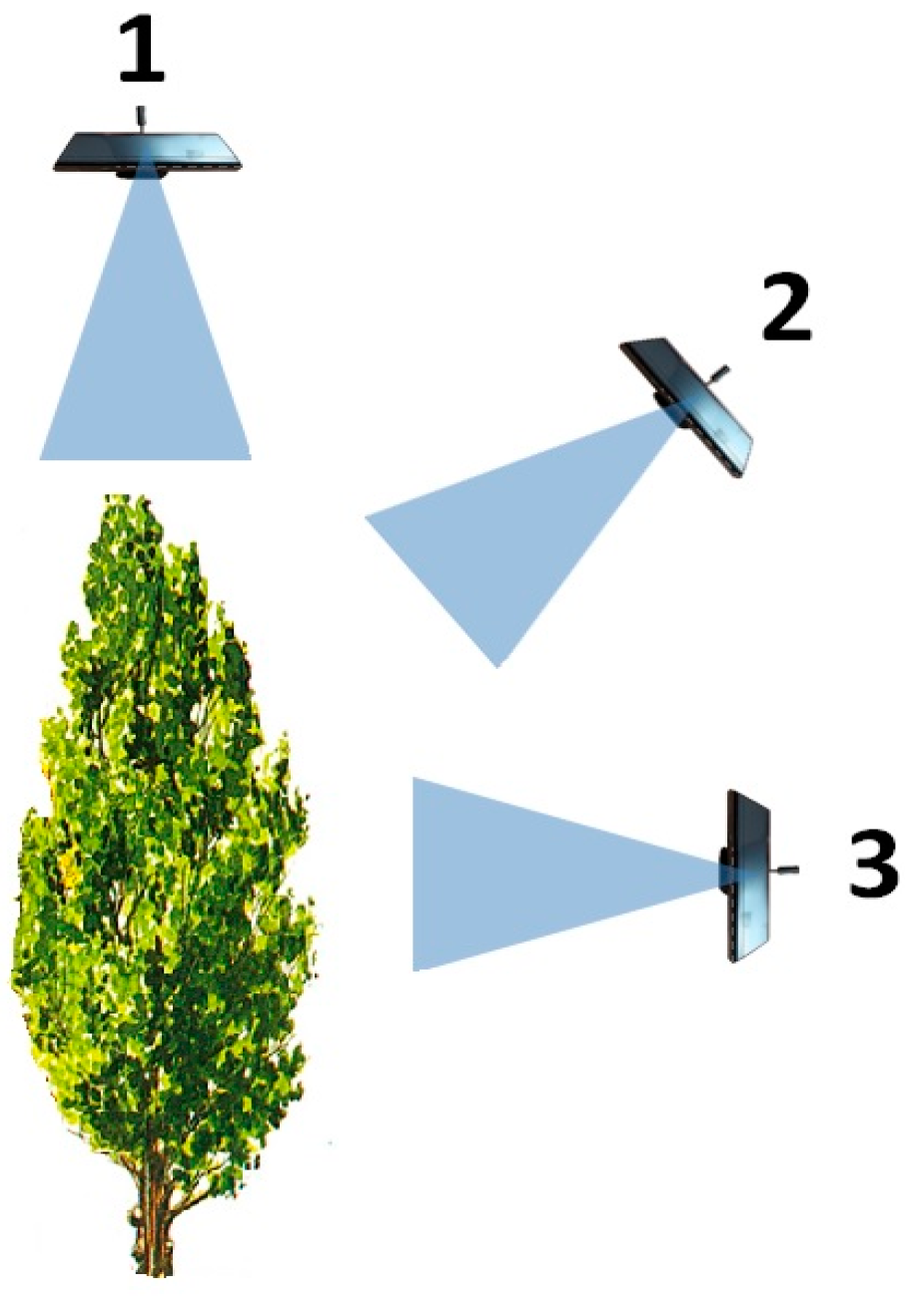
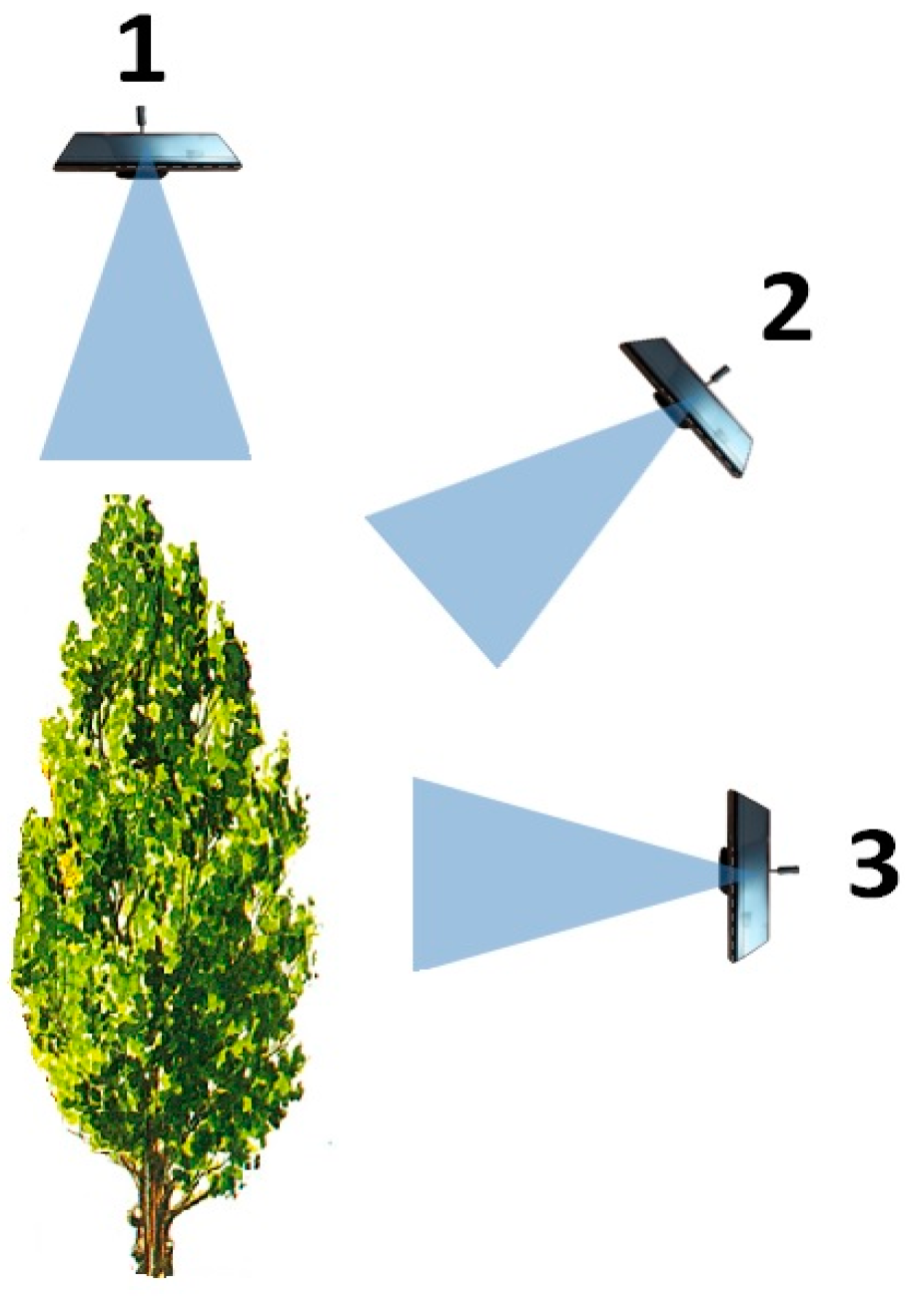
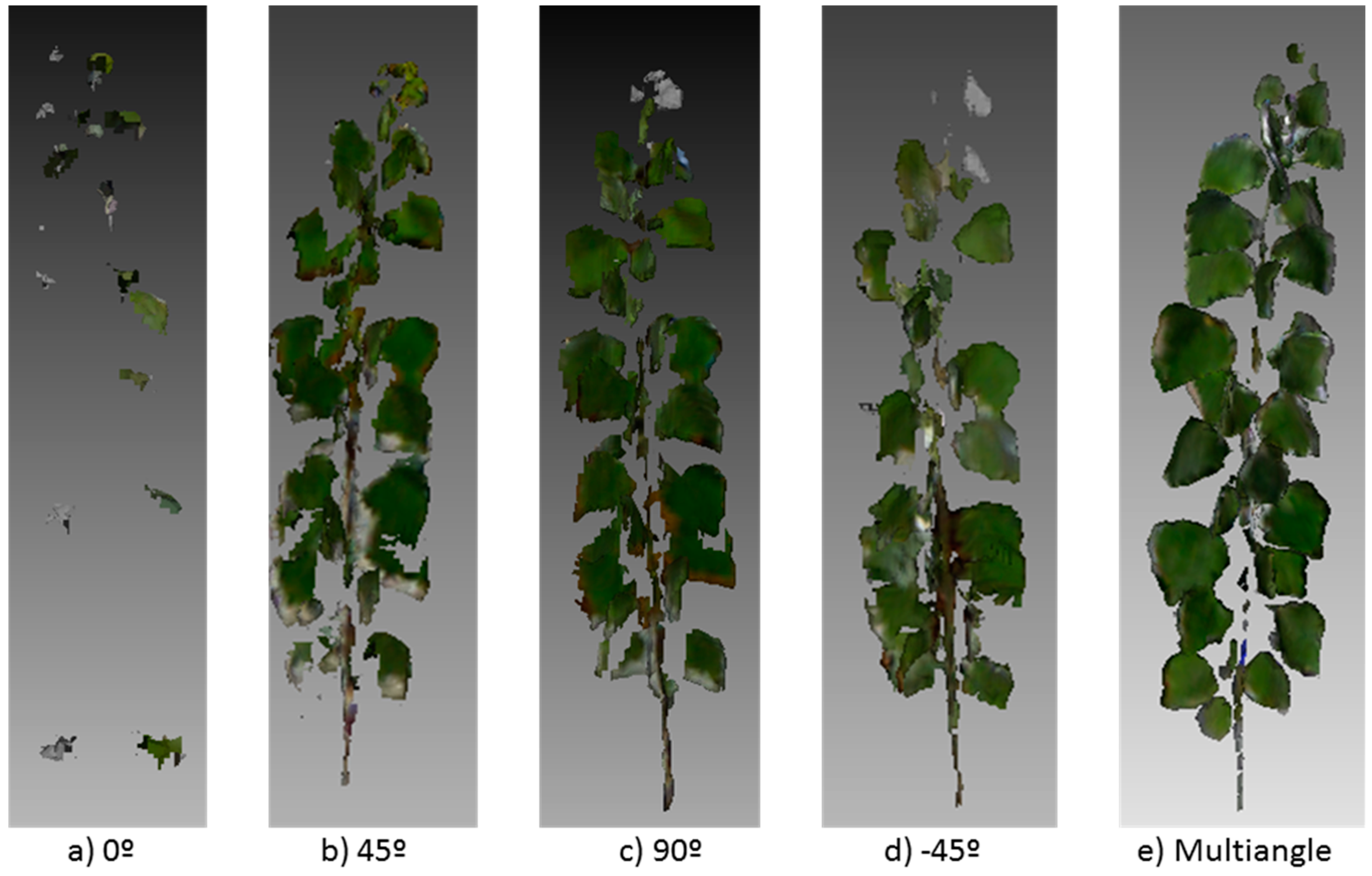
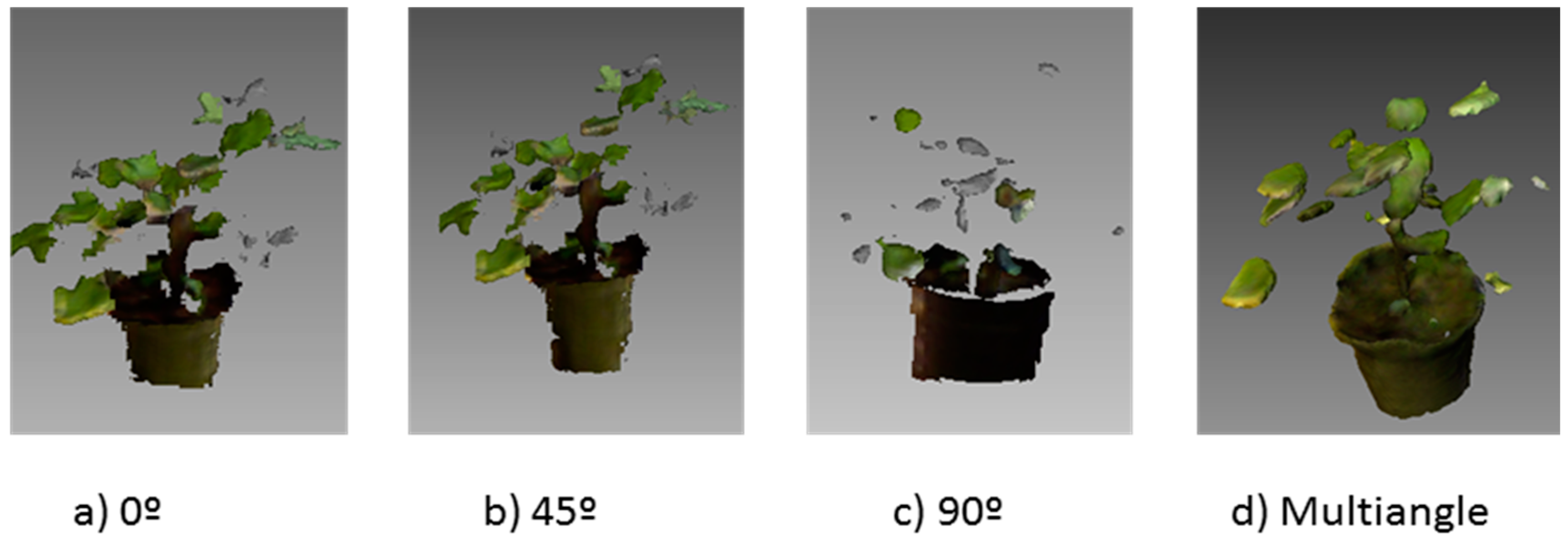
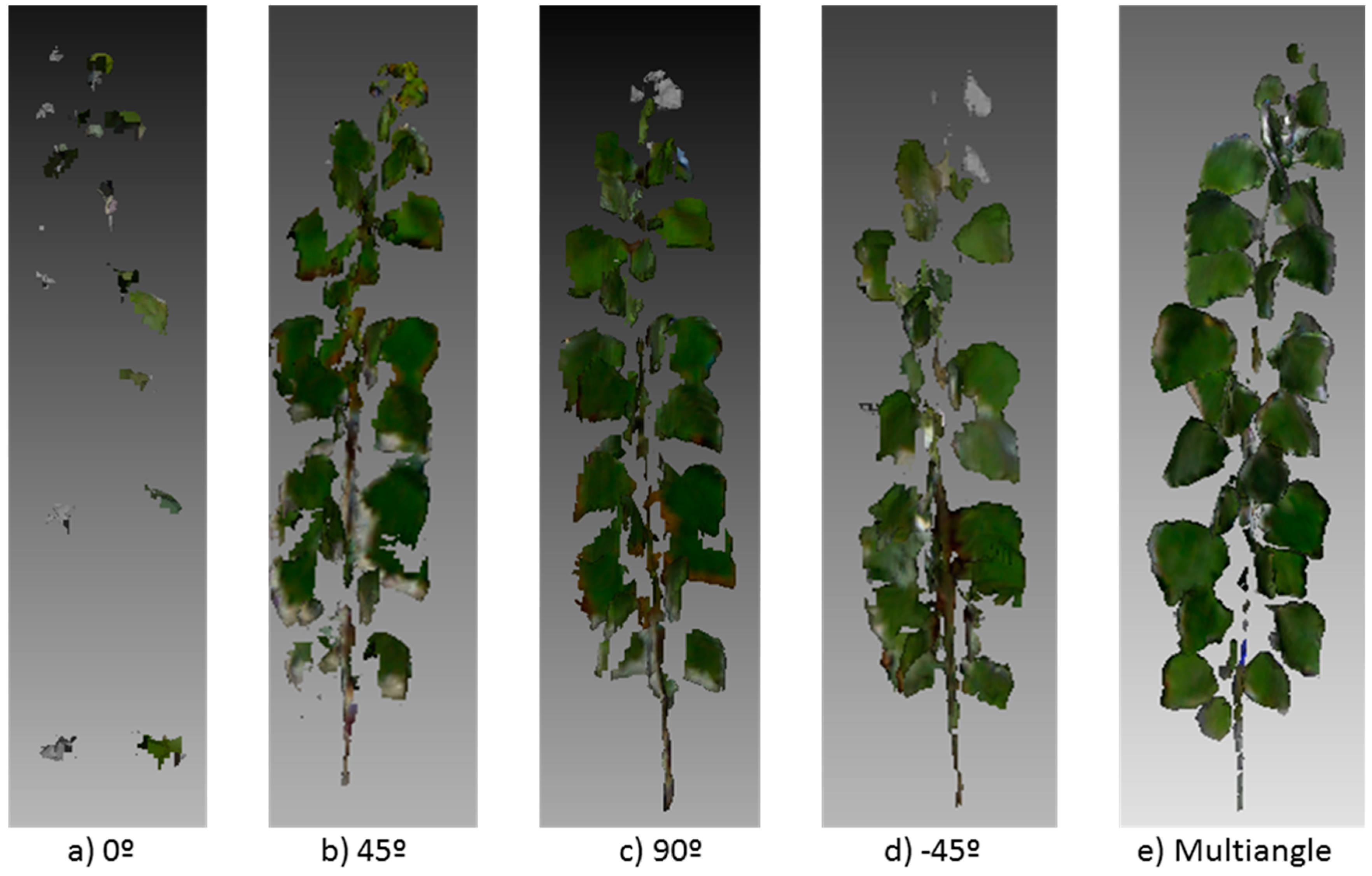
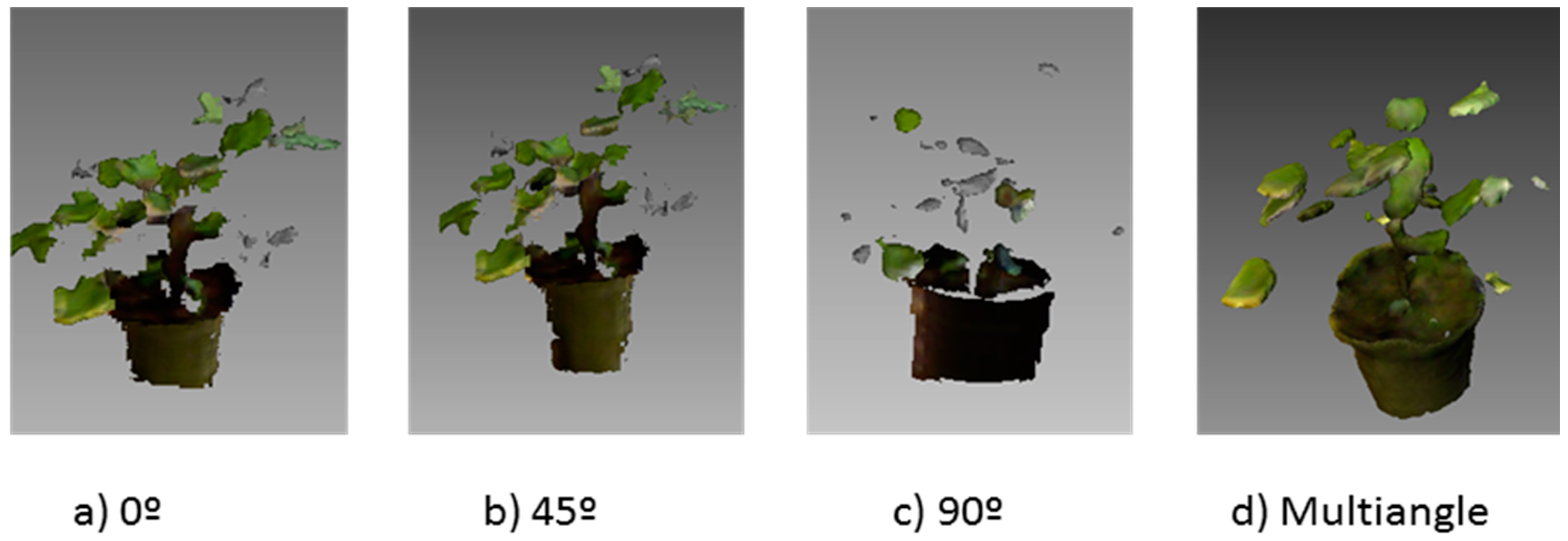
3.2. Sensor Angle Comparison and 3D Analysis
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Börjesson, P. Enviromental effects of energy crop cultivation in Sweden-part I: Identification and quantification. Biomass Bioenergy 1999, 16, 137–154. [Google Scholar] [CrossRef]
- Pérez-Cruzado, C.; Sanchez-Ron, D.; Rodríguez-Soalleiro, R.; Hernández, M.J.; Sánchez-Martín, M.M.; Cañellas, I.; Sixto, H. Biomass production assessment from Populus spp. short-rotation irrigated crops in Spain. Global Change Biol Bioenergy 2014, 6, 312–326. [Google Scholar] [CrossRef]
- Hjelm, B. Empirical Models for Estimating Volume and Biomass of Poplars on Farmland in Sweden. Doctoral Thesis, Swedish University of Agricultural Sciences, Uppsala, Sweden, 2015. [Google Scholar]
- Fiorani, F.; Schurr, U. Future scenarios for plant phenotyping. Annu. Rev. Plant Biol. 2013, 64, 267–291. [Google Scholar] [CrossRef] [PubMed]
- Dhondt, S.; Wuyts, N.; Inzé, D. Cell to whole-plant phenotyping: The best is yet to come. Trends Plant Sci. 2013, 8, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Lou, L.; Liu, Y.H.; Han, J.W.; Doonan, J.N. Accurate Multi-View Stereo 3D Reconstruction for Cost-Effective Plant Phenotyping. In Image Analysis and Recognition (ICIAR); Springer International Publishing: Cham, Switzerland, 2014; pp. 349–356. [Google Scholar]
- Saint Pierre, C.; Crossa, J.L.; Bonnett, D.; Yamaguchi-Shinozaki, K.; Reynolds, M.P. Phenotyping transgenic wheat for drought resistance. J. Exp. Bot. 2012, 63, 1799–1808. [Google Scholar]
- Panguluri, S.K.; Kumar, A.A. Phenotyping for Plant Breeding: Applications of Phenotyping Methods for Crop Improvement; Springer Science + Business Media: New York, NY, USA, 2013. [Google Scholar]
- Sui, R.; Thomasson, J.A.; Hanks, J.; Wooten, J. Ground-based sensing system for weed mapping in cotton. Comput. Electron. Agric. 2008, 60, 31–38. [Google Scholar] [CrossRef]
- Andújar, D.; Ribeiro, A.; Fernández-Quintanilla, C.; Dorado, J. Accuracy and feasibility of optoelectronic sensors for weed mapping in wide row crops. Sensors 2011, 11, 2304–2318. [Google Scholar] [CrossRef] [PubMed]
- Tremblay, N.; Wang, Z.; Ma, B.L.; Belec, C.; Vigneault, P.A. Comparison of crop data measured by two commercial sensors for variable-rate nitrogen application. Precis. Agric. 2009, 10, 145–161. [Google Scholar] [CrossRef]
- Crimmins, M.A.; Crimmins, T.M. Monitoring plant phenology using digital repeat photography. Environ. Manag. 2008, 41, 949–958. [Google Scholar] [CrossRef] [PubMed]
- Cescatti, A. Indirect estimates of canopy gap fraction based on the linear conversion of hemispherical photographs—Methodology and comparison with standard thresholding techniques. Agric. Forest Meteorol. 2007, 143, 1–12. [Google Scholar] [CrossRef]
- Hunt, E.R.; Cavigelli, M.; Daughtry, C.S.T.; Mc Murtrey, J.E.; Walthall, C.L. Evaluation of digital photography from model aircraft for remote sensing of crop biomass and nitrogen status. Precis. Agric. 2005, 6, 359–378. [Google Scholar] [CrossRef]
- Diago, M.P.; Correa, C.; Millán, B.; Barreiro, P.; Valero, C.; Tardaguila, J. Grapevine yield and leaf area estimation using supervised classification methodology on RGB images taken under field conditions. Sensors 2012, 12, 16988–17006. [Google Scholar] [CrossRef] [PubMed]
- Weis, M.; Sökefeld, M. Detection and identification of weeds. In Precision Crop Protection-the Challenge and Use of Heterogeneity; Springer Verlag: Dordrecht, The Netherlands, 2010; Volume 1, pp. 119–134. [Google Scholar]
- Peteinatos, G.; Geiser, M.; Kunz, C.; Gerhards, R. Multisensor approach to identify combined stress symptoms on spring wheat. In Proceedings of the Second International Conference on Robotics and Associated High-Technologies and Equipment for Agriculture and Forestry (Rhea-2014), Madrid, Spain, 21–23 May 2014; pp. 131–140.
- Méndez, V.; Rosell-Polo, J.R.; Sanz, R.; Escolà, A.; Catalán, H. Deciduous tree reconstruction algorithm based on cylinder fitting from mobile terrestrial laser scanned point clouds. Biosyst. Eng. 2014, 124, 78–88. [Google Scholar] [CrossRef]
- Ferrazzoli, P.; Paloscia, S.; Pampaloni, P.; Schiavon, G.; Sigismondi, S.; Solimini, D. The potential of multifrequency polarimetric SAR in assessing agricultural and arboreous biomass. IEEE Trans. Geosci. Remote Sens. 1997, 35, 5–17. [Google Scholar] [CrossRef]
- Bongers, F. Methods to assess tropical rain forest canopy structure: An overview. Plant Ecol. 2001, 153, 263–277. [Google Scholar] [CrossRef]
- Stuppy, W.H.; Maisano, J.A.; Colbert, M.W.; Rudall, P.J.; Rowe, T.B. Three-dimensional analysis of plant structure using high-resolution X-ray computed tomography. Trends Plant Sci. 2003, 8, 2–6. [Google Scholar] [CrossRef]
- Andújar, D.; Escolà, A.; Dorado, J.; Fernández-Quintanilla, C. Weed discrimination using ultrasonic sensors. Weed Res. 2011, 51, 543–547. [Google Scholar] [CrossRef]
- Escolà, A.; Planas, S.; Rosell, J.R.; Pomar, J.; Camp, F.; Solanelles, F.; Gracia, F.; Llorens, J.; Gil, E. Performance of an ultrasonic ranging sensor in apple tree canopies. Sensors 2011, 11, 2459–2477. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.M.; Black, T.A.; Adams, R.S. Evaluation of hemispherical photography for determining plant area index and geometry of a forest stand. Agric. Forest Meteorol. 1991, 56, 129–143. [Google Scholar] [CrossRef]
- Andersen, H.J.; Reng, L.; Kirk, K. Geometric plant properties by relaxed stereo vision using simulated annealing. Comput. Electron. Agric. 2005, 49, 219–232. [Google Scholar] [CrossRef]
- Dal Mutto, C.; Zanuttigh, P.; Cortelazzo, G.M. Time-of-Flight Cameras and Microsoft KinectTM; Series: Springer Briefs in Electrical and Computer Engineering; Springer: New York, NY, USA, 2012. [Google Scholar]
- Paulus, S.; Behmann, J.; Mahlein, A.K.; Plümer, L.; Kuhlmann, H. Low-cost 3D systems: Suitable tools for plant phenotyping. Sensors 2014, 14, 3001–3018. [Google Scholar] [CrossRef] [PubMed]
- Chéné, Y.; Rousseau, D.; Lucidarme, P.; Bertheloot, J.; Caffier, V.; Morel, P.; Belin, E.; Chapeau-Blondeau, F. On the use of depth camera for 3D phenotyping of entire plants. Comput. Electron. Agric. 2012, 82, 122–127. [Google Scholar] [CrossRef]
- Correa, C.; Valero, C.; Barreiro, P.; Ortiz-Cañavate, J.; Gil, J. Usando Kinect como sensor para pulverización inteligente. In VII Congreso Ibérico de Agroingeniería y Ciencias Hortícolas; UPM: Madrid, Spain, 2013. [Google Scholar]
- Jay, S.; Rabatel, G.; Hadoux, X.; Moura, D.; Gorretta, N. In-field crop row phenotyping from 3D modeling performed using Structure from Motion. Comput. Electron. Agric. 2015, 110, 70–77. [Google Scholar] [CrossRef]
- Nock, C.A.; Taugourdeau, O.; Delagrange, S.; Messier, C. Assessing the potential of low-cost 3D cameras for the rapid measurement of plant woody structure. Sensors 2013, 13, 16216–16233. [Google Scholar] [CrossRef] [PubMed]
- Khoshelham, K.; Elberink, S.O. Accuracy and Resolution of Kinect Depth Data for Indoor Mapping Applications. Sensors 2012, 12, 1437–1454. [Google Scholar] [CrossRef] [PubMed]
- Andújar, D.; Rueda-Ayala, V.; Moreno, H.; Rosell-Polo, J.R.; Escolà, A.; Valero, C.; Gerhards, R.; Fernández-Quintanilla, C.; Dorado, J.; Giepentrog, H.W. Discriminating crop, weeds and soil surface with a terrestrial LIDAR sensor. Sensors 2013, 13, 14662–14675. [Google Scholar] [CrossRef] [PubMed]
- Llorens, J.; Gil, E.; Llop, J.; Escolà, A. Ultrasonic and LIDAR sensors for electronic canopy characterization in vineyards: Advances to improve pesticide application methods. Sensors 2011, 11, 2177–2194. [Google Scholar] [CrossRef] [PubMed]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andújar, D.; Fernández-Quintanilla, C.; Dorado, J. Matching the Best Viewing Angle in Depth Cameras for Biomass Estimation Based on Poplar Seedling Geometry. Sensors 2015, 15, 12999-13011. https://doi.org/10.3390/s150612999
Andújar D, Fernández-Quintanilla C, Dorado J. Matching the Best Viewing Angle in Depth Cameras for Biomass Estimation Based on Poplar Seedling Geometry. Sensors. 2015; 15(6):12999-13011. https://doi.org/10.3390/s150612999
Chicago/Turabian StyleAndújar, Dionisio, César Fernández-Quintanilla, and José Dorado. 2015. "Matching the Best Viewing Angle in Depth Cameras for Biomass Estimation Based on Poplar Seedling Geometry" Sensors 15, no. 6: 12999-13011. https://doi.org/10.3390/s150612999
APA StyleAndújar, D., Fernández-Quintanilla, C., & Dorado, J. (2015). Matching the Best Viewing Angle in Depth Cameras for Biomass Estimation Based on Poplar Seedling Geometry. Sensors, 15(6), 12999-13011. https://doi.org/10.3390/s150612999