The SGA-WZ-02 is the new airborne gravimeter developed by the Laboratory of Inertial Technology of the National University of Defense Technology. The airborne experiments show that the precision of SGA-WZ-02 is better than 1 mGal/4.8 km.
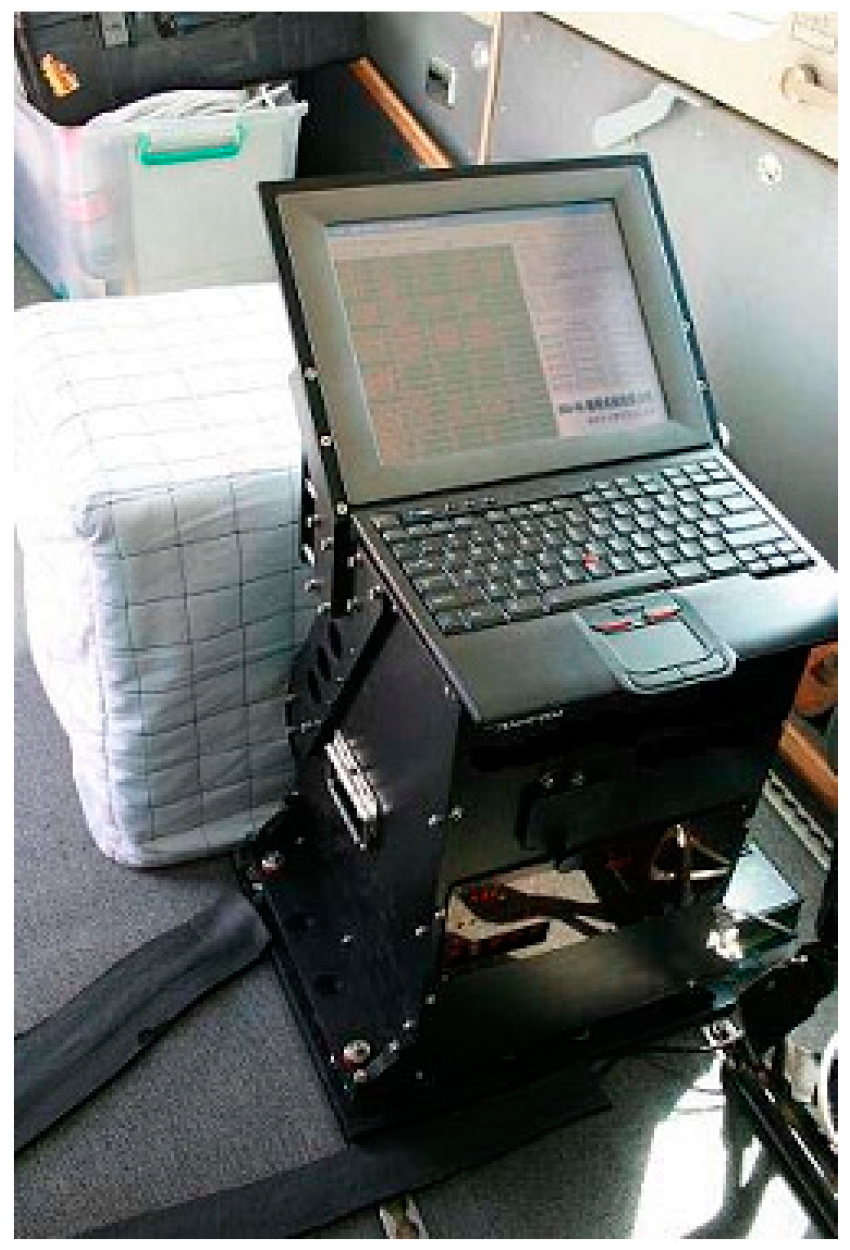
Figure 6 shows a photo of the SGA-WZ-02, where the sensor box is on the bottom of the electric box.
Figure 6.
Photo of the SGA-WZ-02.
3.1. The Optimized 1st Level Temperature Control Design Based on a Thermoelectric Cooler
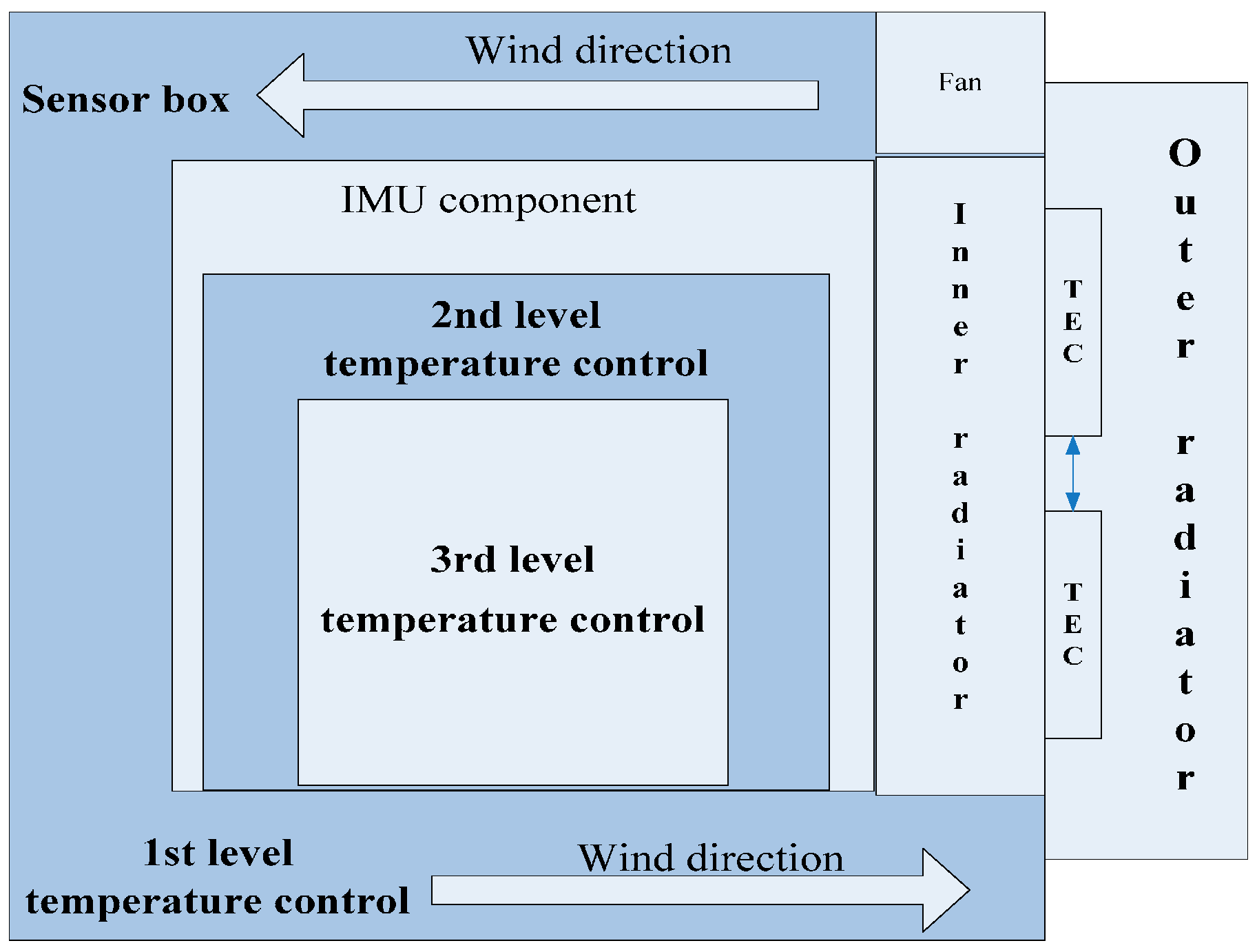
In order to conquer the problem caused by hot weather in the SGA-WZ-01 Temperature Control System, a thermoelectric cooler (TEC) is adopted in the 1st level temperature control. TEC is based on the Peltier Effect, which is the presence of heating or cooling at an electrified junction of two different conductors. Therefore, the TEC works like a solid-state active heat pump which transfers heat from one side of the device to the other, with some consumption of electrical energy.
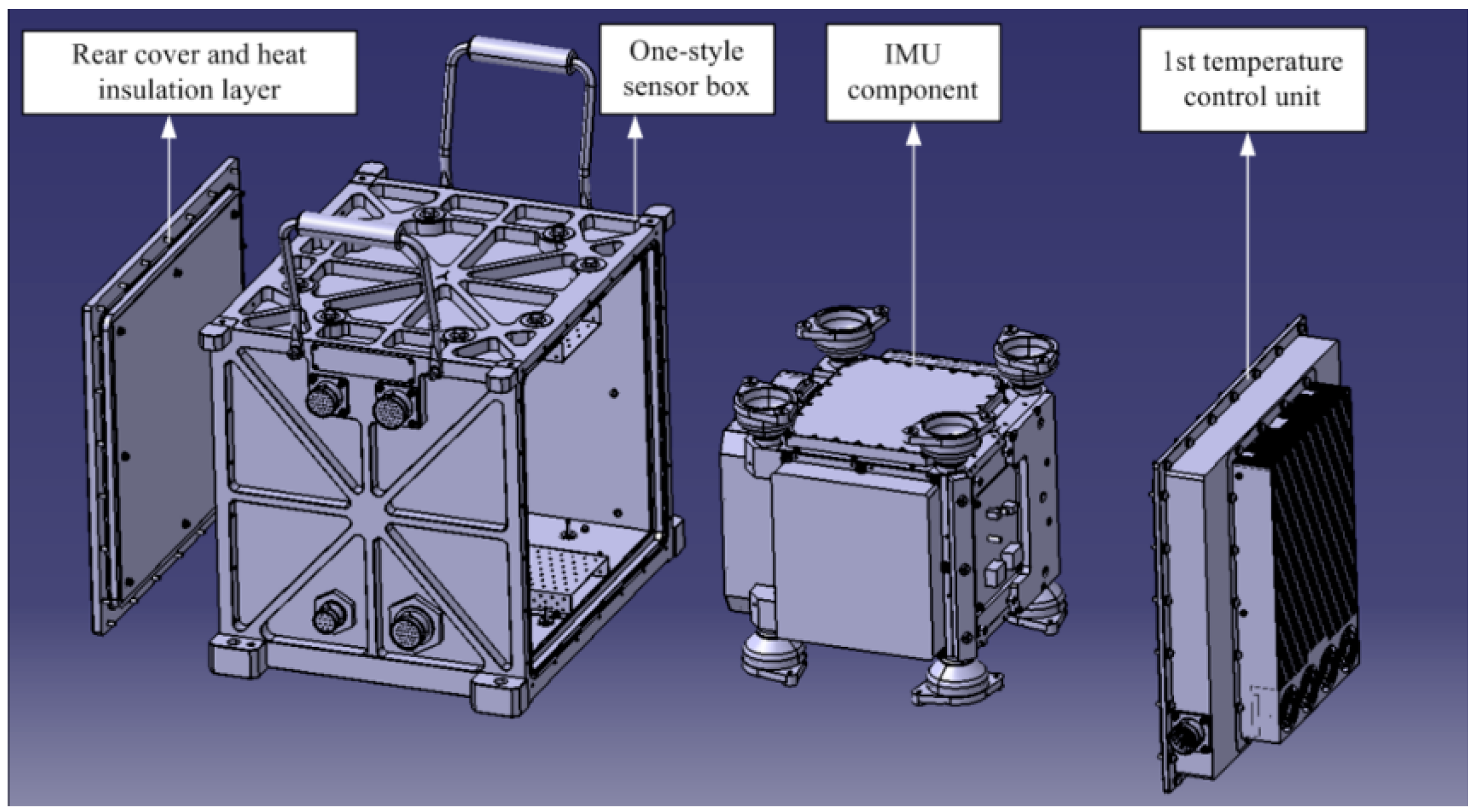
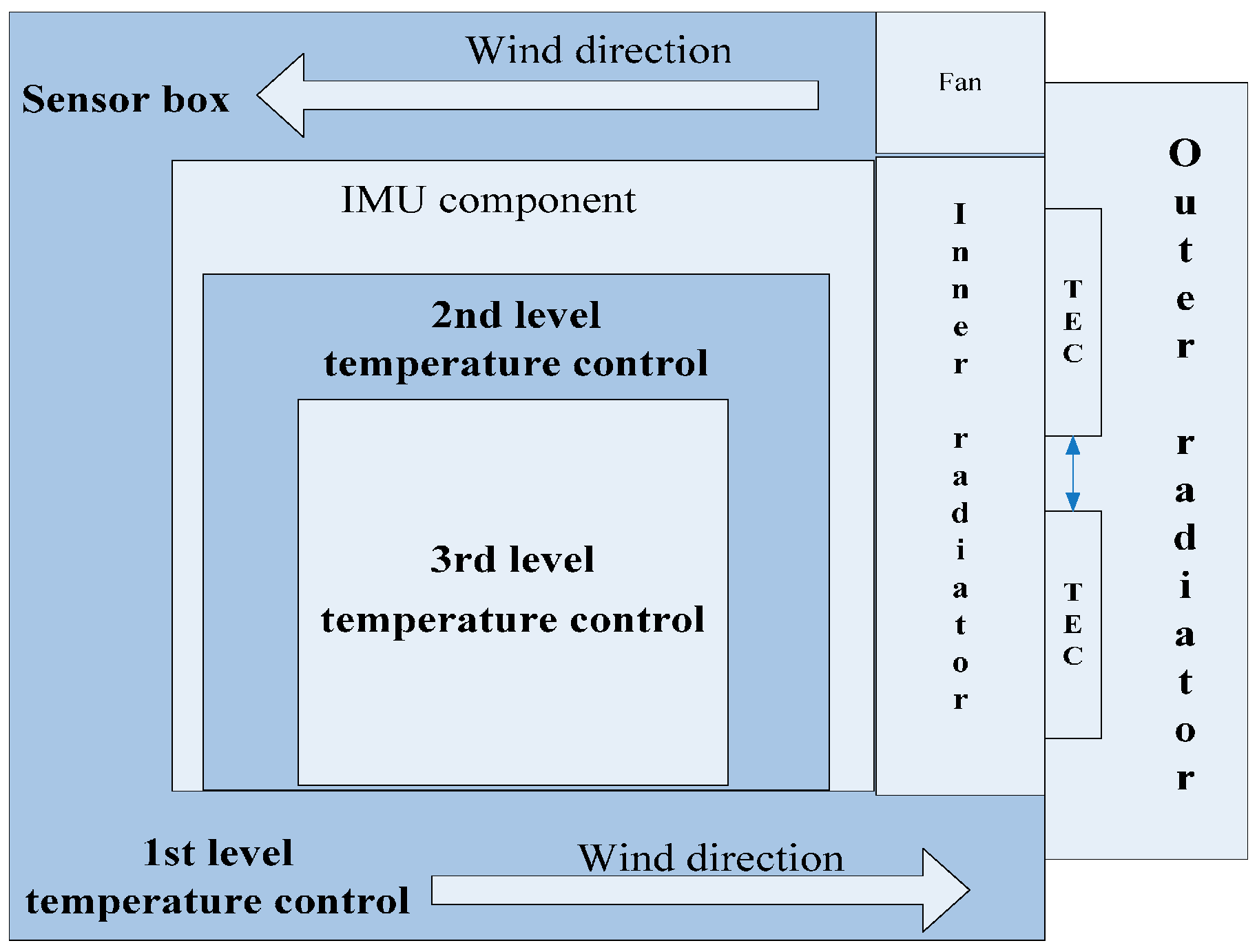
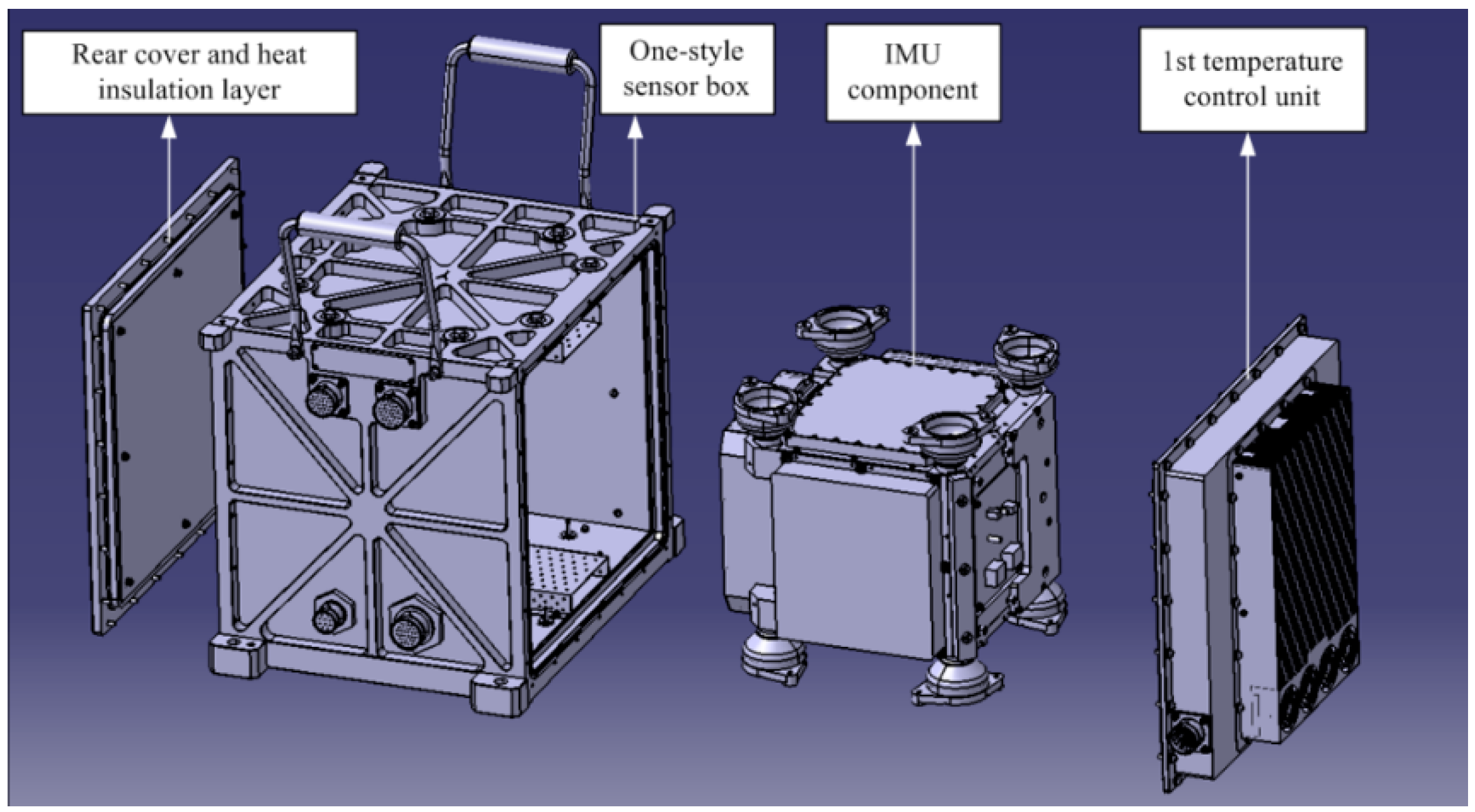
The temperature control system of the SGA-WZ-02 adopts a one-style design with compact and reasonable structure, prominently reducing the volume and the power consumption. The structure of the 1st level temperature control is shown in
Figure 7 and a sketch of the optimized 1st level temperature control design is shown in
Figure 8.
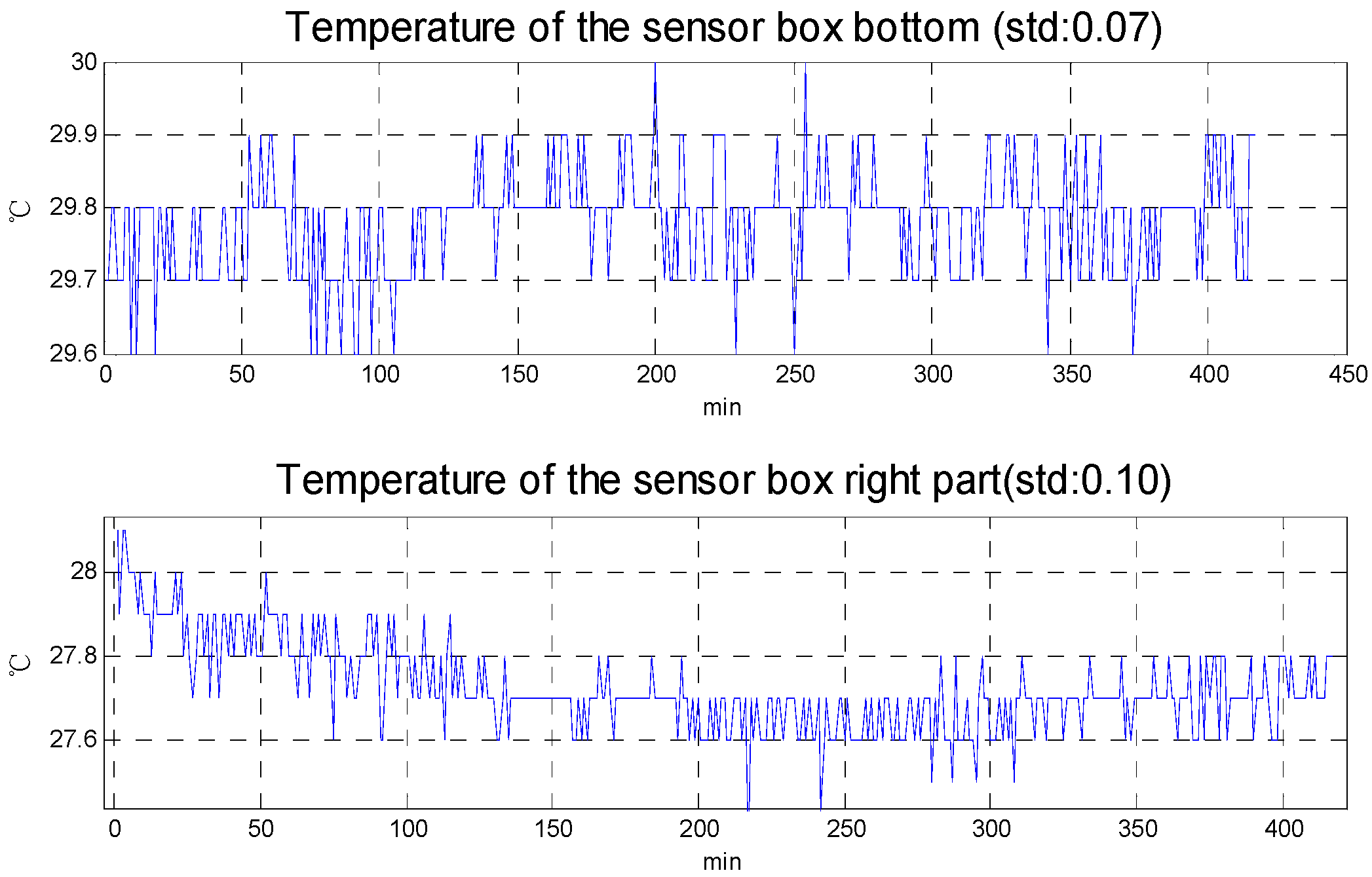
In order to estimate the performance of the new design, stability experiments and max cool down capability experiments are carried out.
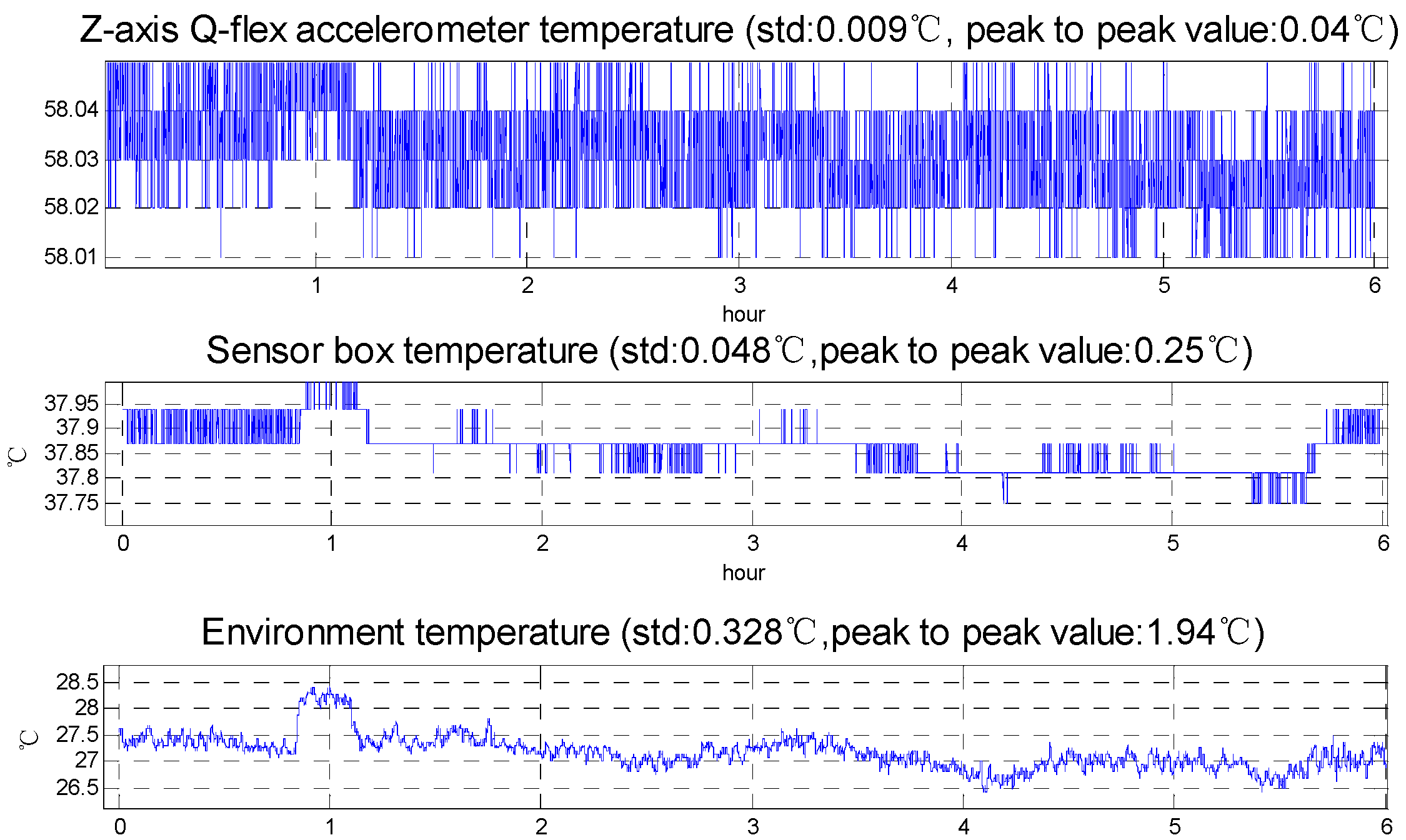
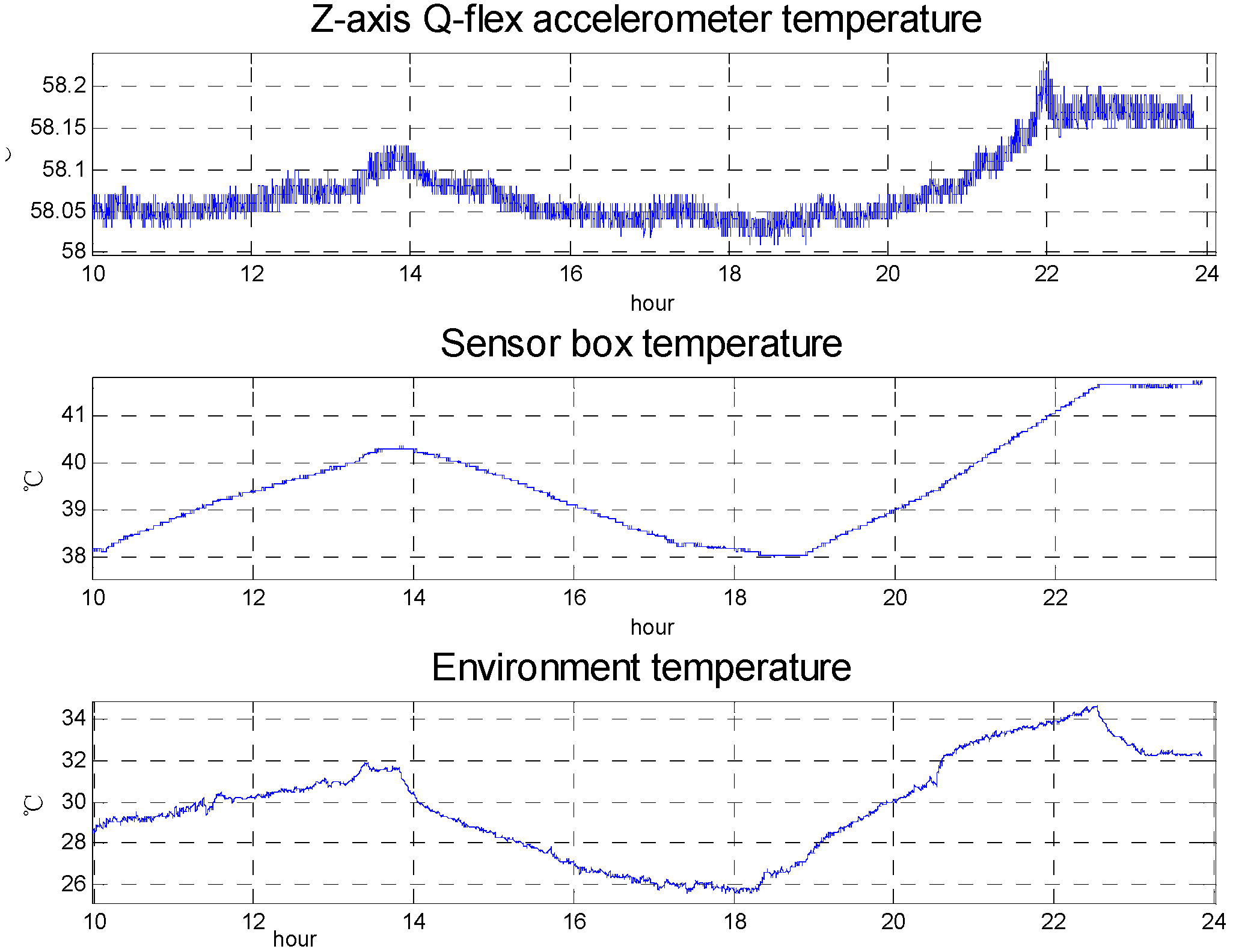
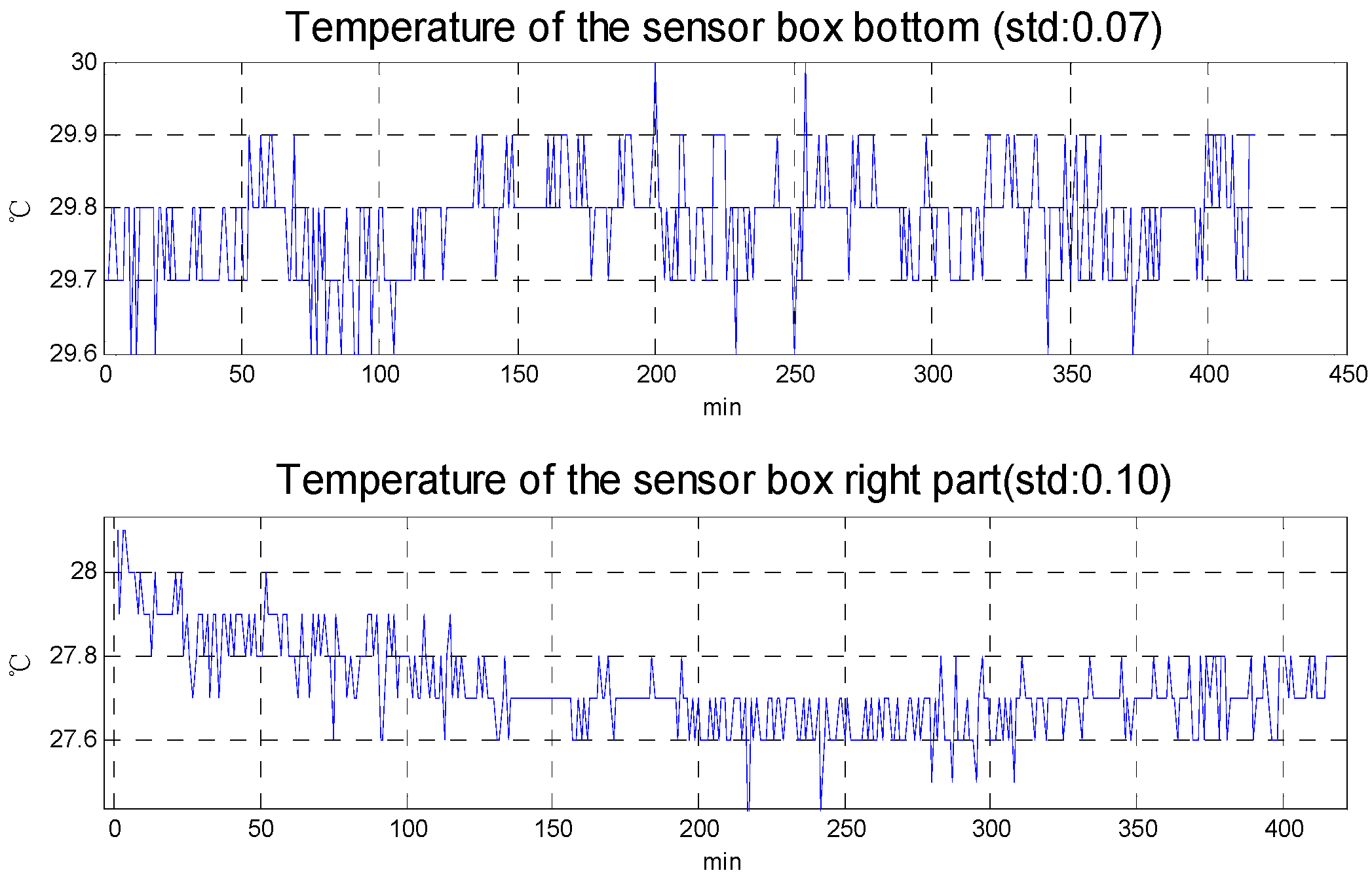
Figure 9 shows the result of the stability experiments. In the stability experiments, the set temperature is 30 °C.
Figure 9 indicates that a temperature gradient exists in the temperature control system, but the temperature gradient is unavoidable in every single input temperature control system. The decisive element in the temperature control system of the airborne gravimeter is its stability, and
Figure 9 shows that the temperature stability meets the system requirements (superior to 0.5 °C).
Figure 7.
The structure of the 1st level temperature control in SGA-WZ-02.
Figure 7.
The structure of the 1st level temperature control in SGA-WZ-02.
Figure 8.
Sketch of the 1st level temperature control in SGA-WZ-02.
Figure 8.
Sketch of the 1st level temperature control in SGA-WZ-02.
Figure 9.
The stability experiment results.
Figure 9.
The stability experiment results.
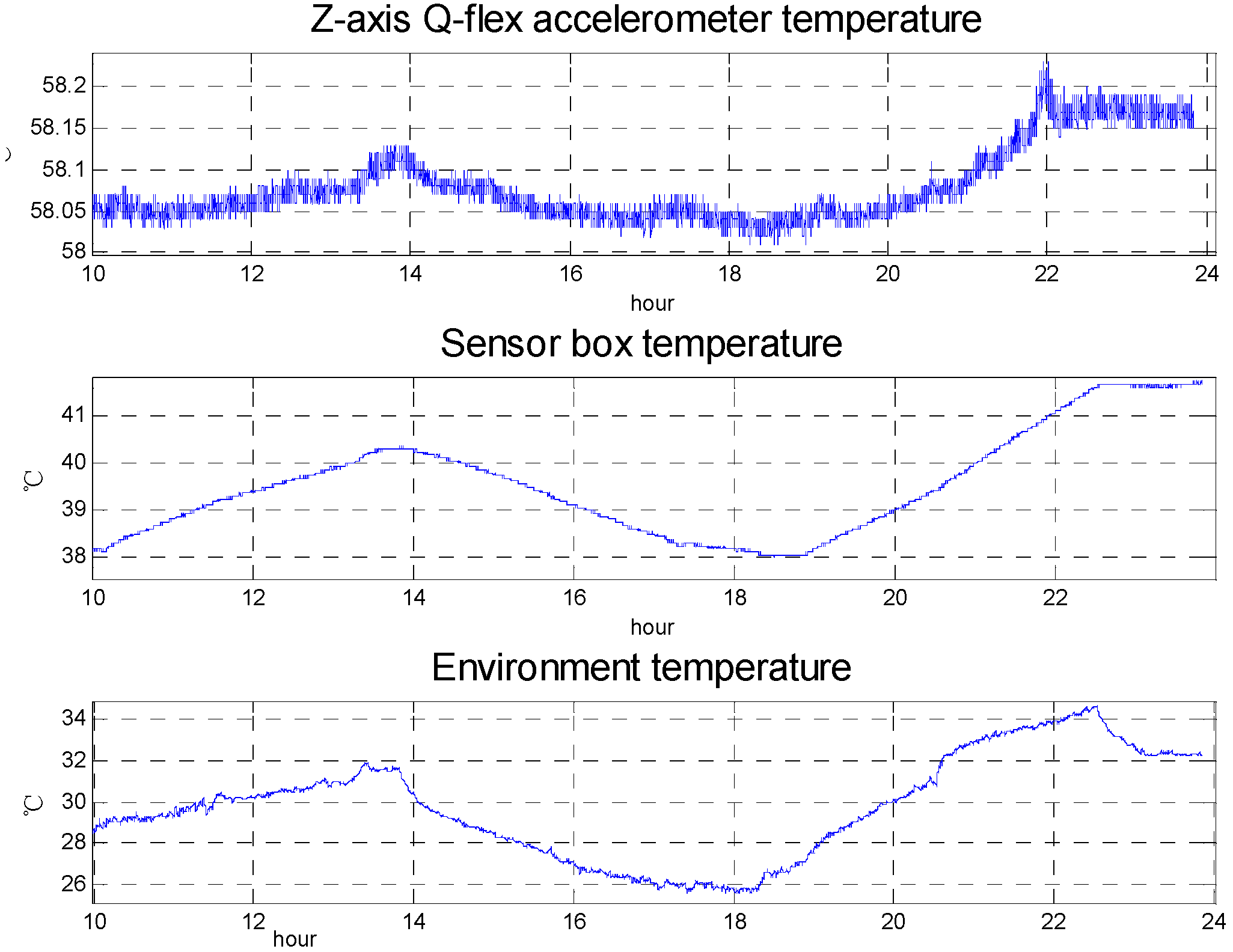
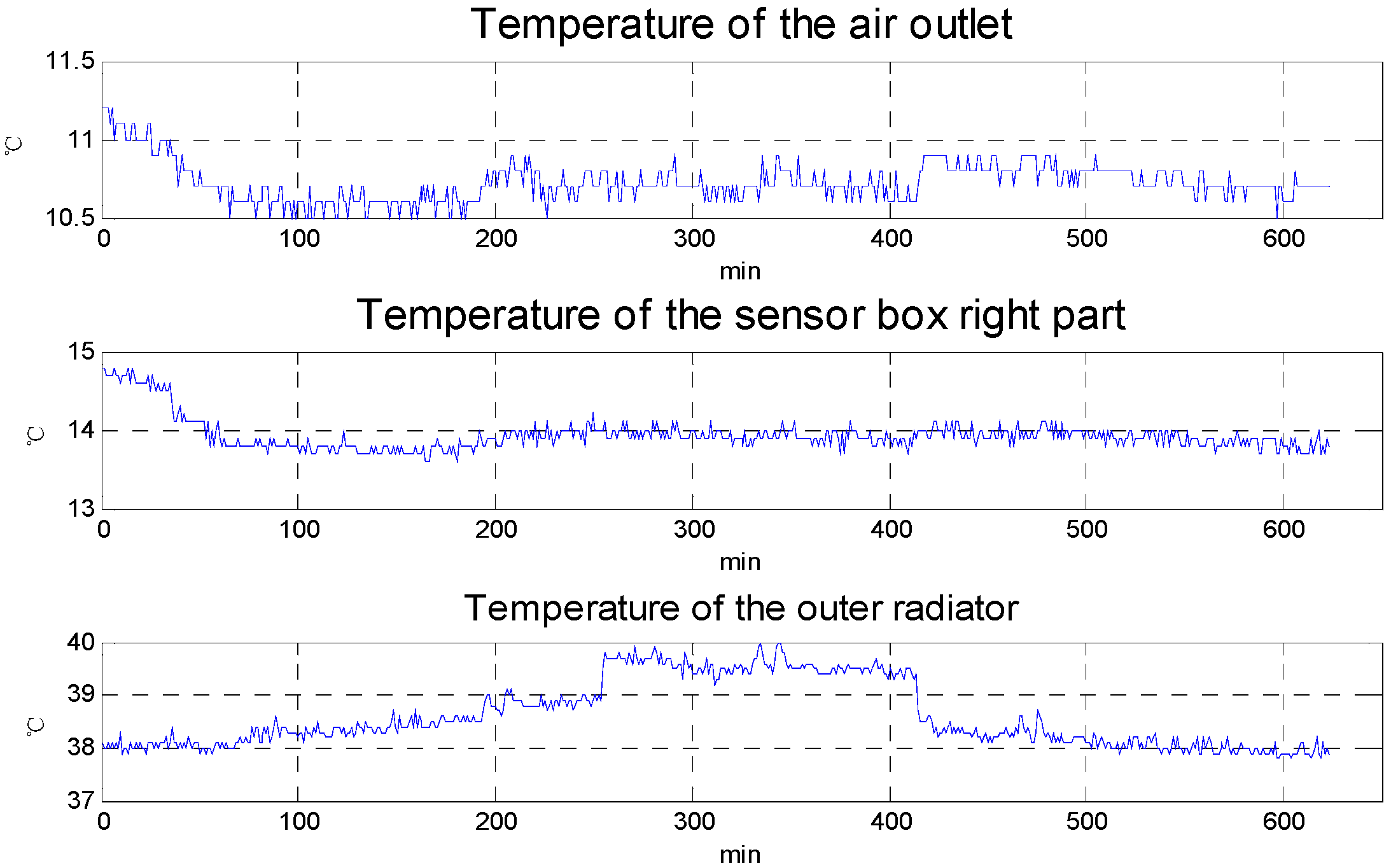
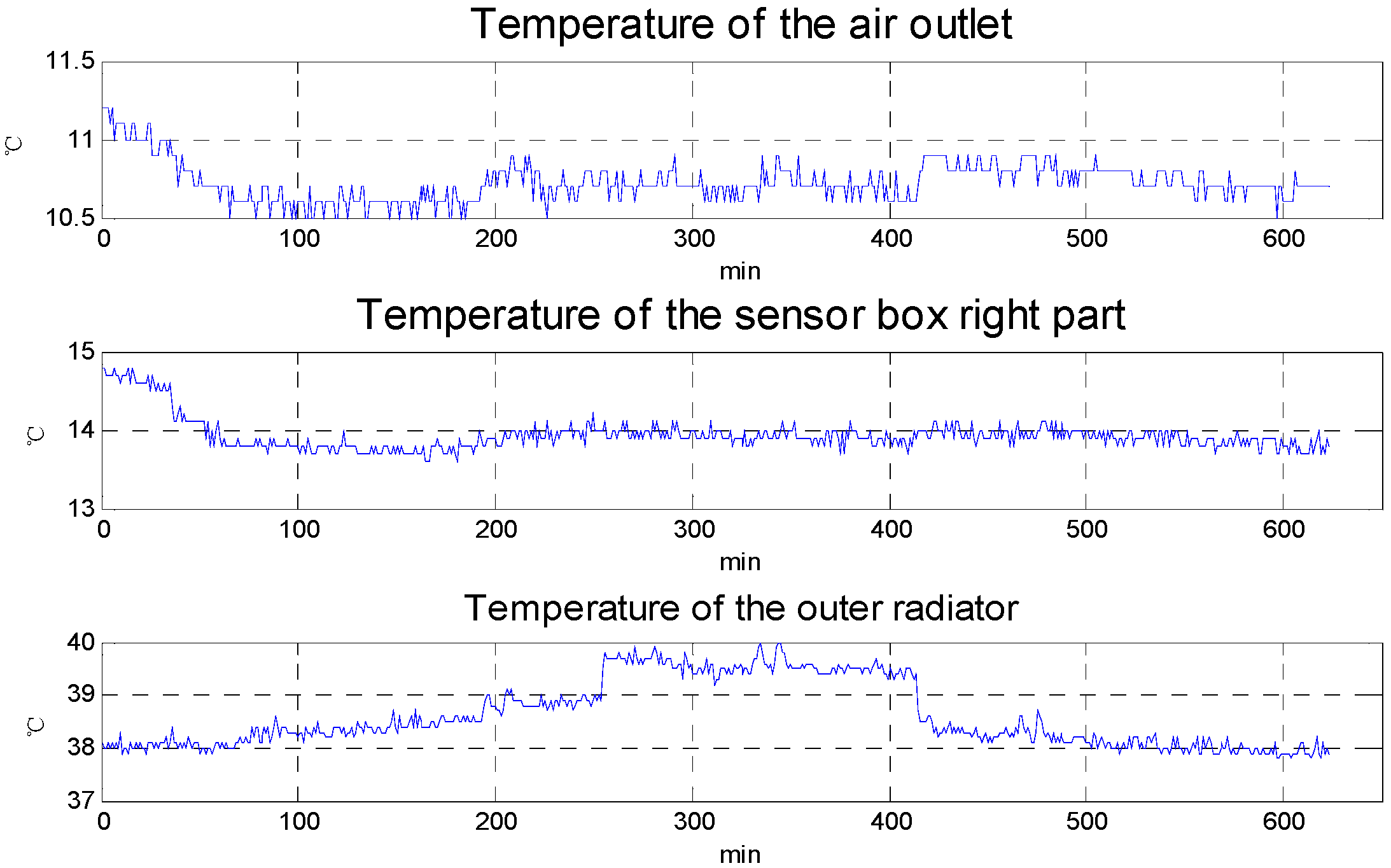
Figure 10 shows the results of the max cool down capability experiments. Room temperature is about 25 °C in the experiments. To evaluate the cool down capability, the set temperature is 0 °C. The temperature difference between the outer radiator and the air outlet is about 30 °C, so that the temperature difference essentially reaches the max temperature difference of the selected TEC and proves the 1st level temperature control unit has a good heat sink capability. From the experimental results, the max cool down capability is about 15 °C compared with the air outlet temperature and about 11 °C compared with the right part of sensor box.
Figure 5 shows that the max temperature rise in the aircraft cabin is less than 10 °C, so the cool down capability of 1st level temperature control meets the requirements for actual use.
Figure 10.
The max cool down capability experiment results.
Figure 10.
The max cool down capability experiment results.
3.2. The 2nd and 3rd Level Temperature Control Unit Heat Analysis
As a result of the equipment being a newly optimized design, heat analysis is needed in the 2nd and 3rd level temperature control units to meet the temperature control precision requirement. In the 2nd and 3rd level temperature control units, three basic ways of heat transfer (radiation, conduction and convection) exist to different degrees. The main forms of heat exchange in temperature control units can be any of the following three:
- (1)
Heat conduction of the component itself;
- (2)
The radiation from the unit surfaces to the environment;
- (3)
The convection between the internal and external surface of unit heat transfer.
Besides the ways of heat exchange, the material’s thermal physical properties, boundary conditions, related thermal parameters and the heat transfer coefficient used in the calculations are necessarily clarified in the heat analysis. The thermal physical properties are listed in
Table 1.
Table 1.
Material physical properties.
Table 1.
Material physical properties.
| Material | Density | Specific Heat | Heat Conduct Coefficient |
|---|
| Steel | 7840 | 450 | 49.8 |
| Heat insulation material | 30 | 1400 | 0.03 |
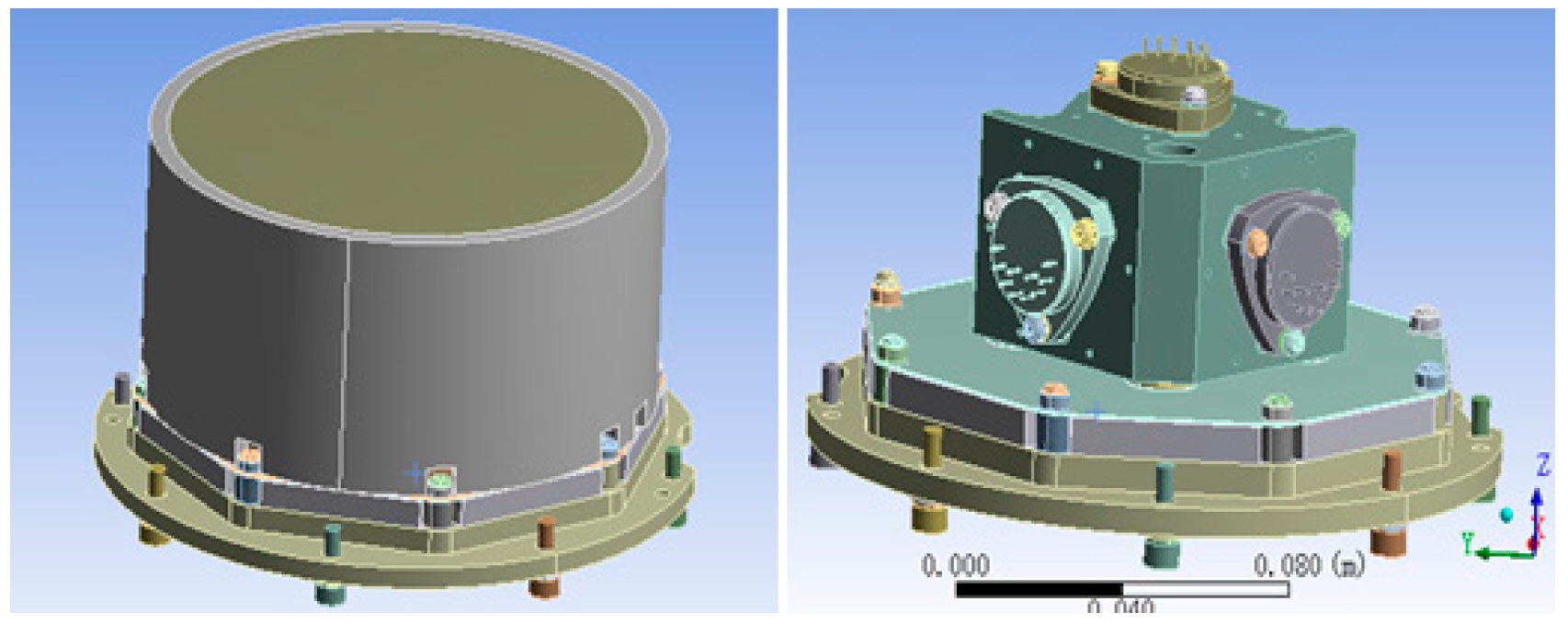
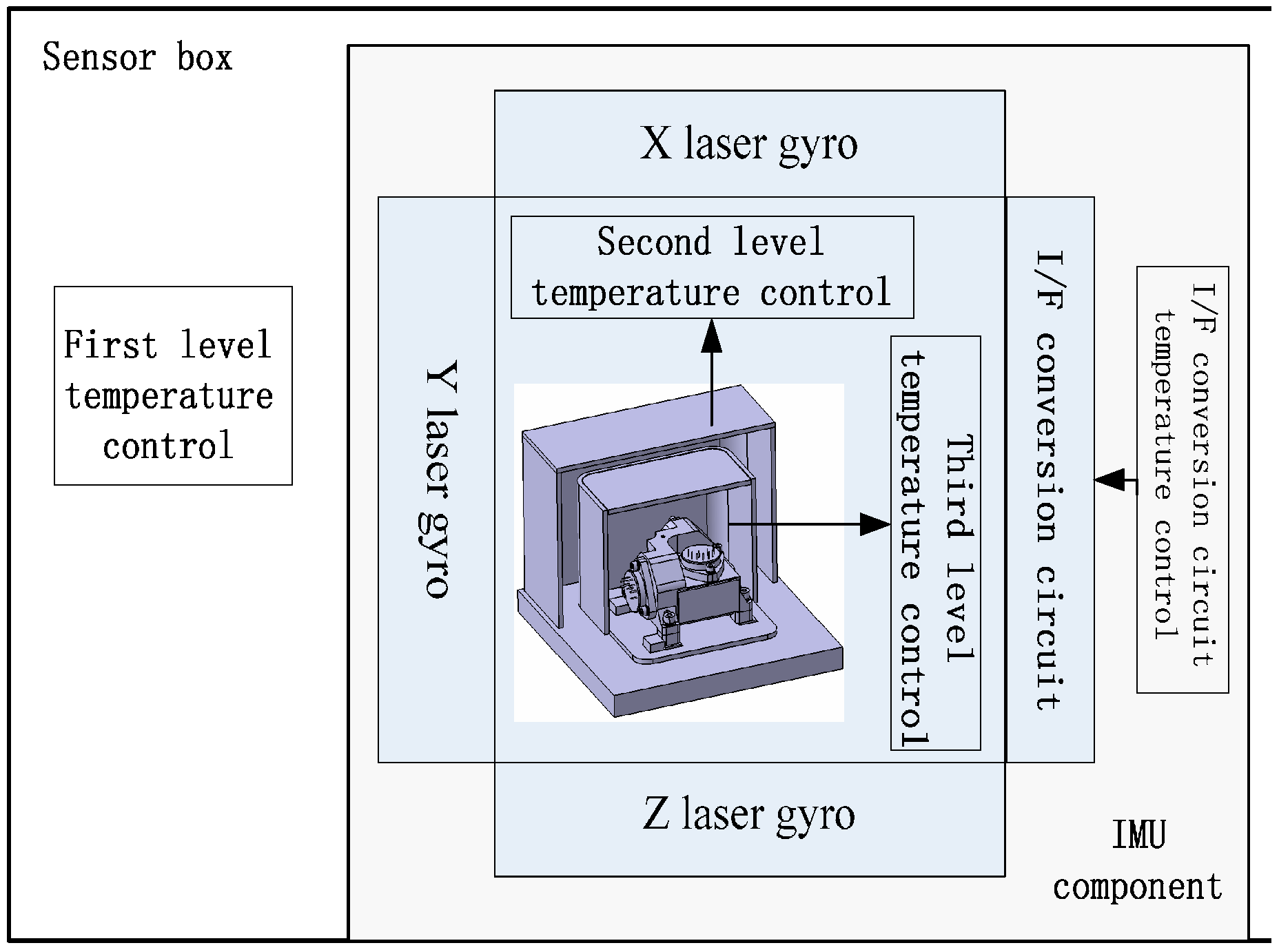
The quartz flexible accelerometer unit, which contains 2nd and 3rd level temperature control units, is shown in
Figure 11. The quartz flexible accelerometer unit is assembled into the IMU component from the bottom side. The 2nd level heating is on the outer wall of the unit shell. The heat insulation measures use foam in the outer of 2nd level heating sheet. The 3rd level heating is on the bottom of the accelerometer base and directly controls the temperature of the accelerometer.
Figure 11.
Structure diagram of the accelerometer installation with temperature control system.
Figure 11.
Structure diagram of the accelerometer installation with temperature control system.
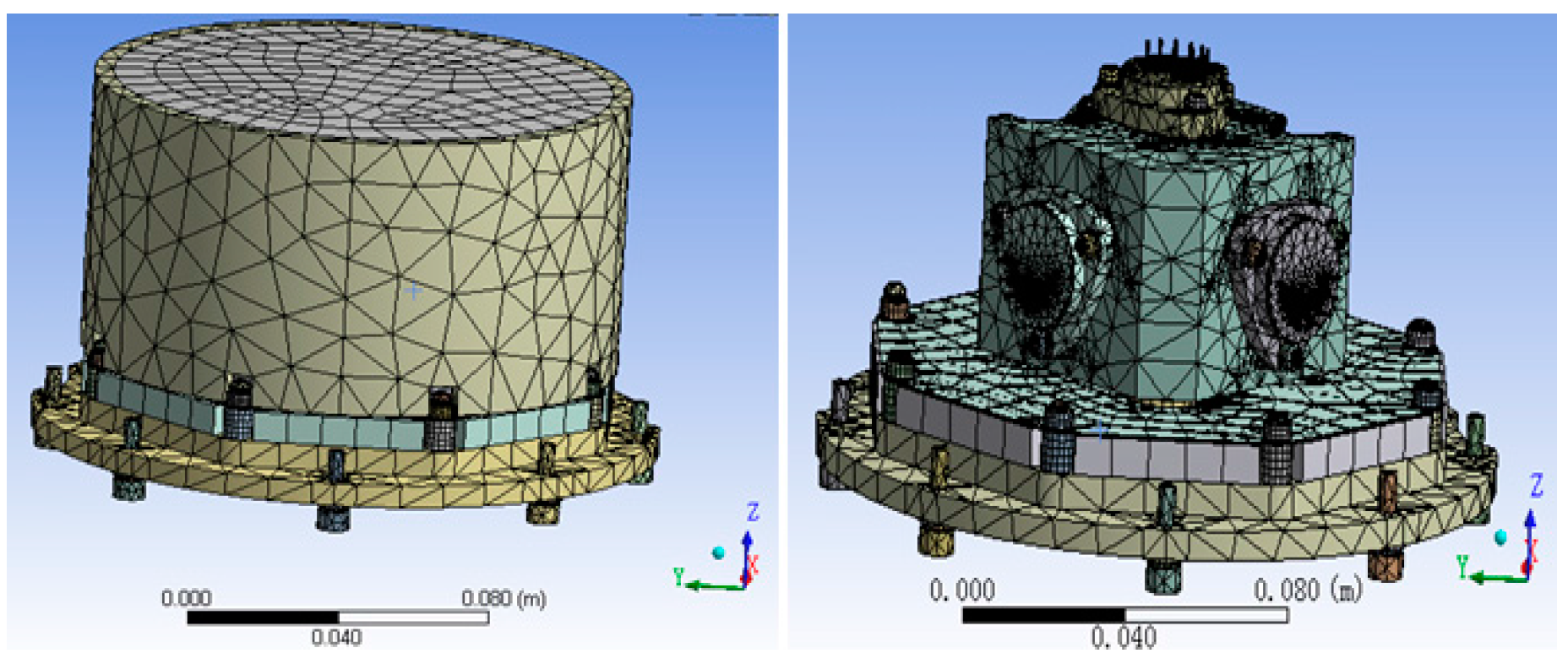
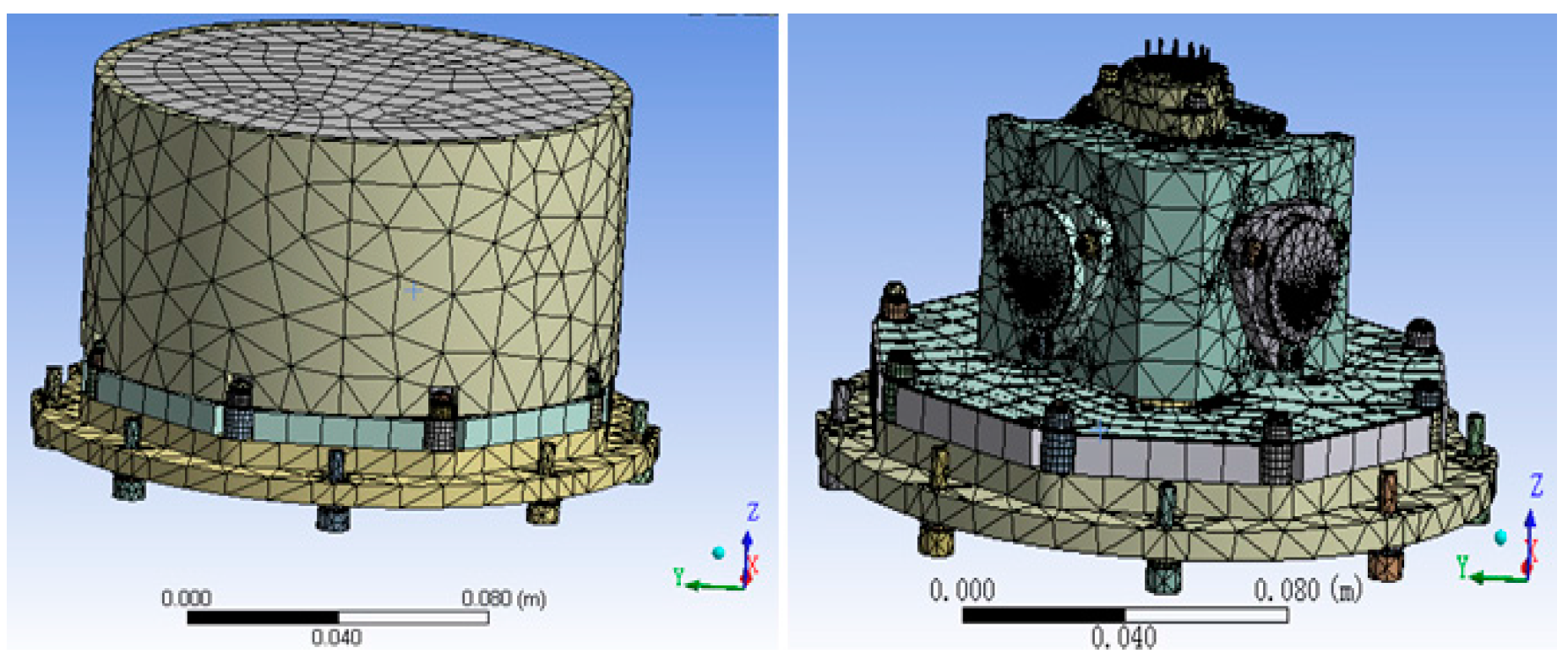
Using the finite element analysis software ANSYS [
10] to analyze the temperature field of accelerometer unit, we can make an appropriate simplification. We ignore the accelerometer’s heat generation, because accelerometer’s heat generation is much less than that of the heat sheet. We also need to refine finite element mesh division of the structure joint, like heat transfer of the accelerometer fixed screw in the internal system [
11]. Finally, as the finite element model of accelerometer unit in
Figure 12 shows, the nodes and units of the division of finite elements are 258,755 and 111,539, respectively. Needless to say, intensive meshing is helpful to improve the accuracy of the simulation [
12].
Figure 12.
The finite element model of the accelerometer unit.
Figure 12.
The finite element model of the accelerometer unit.
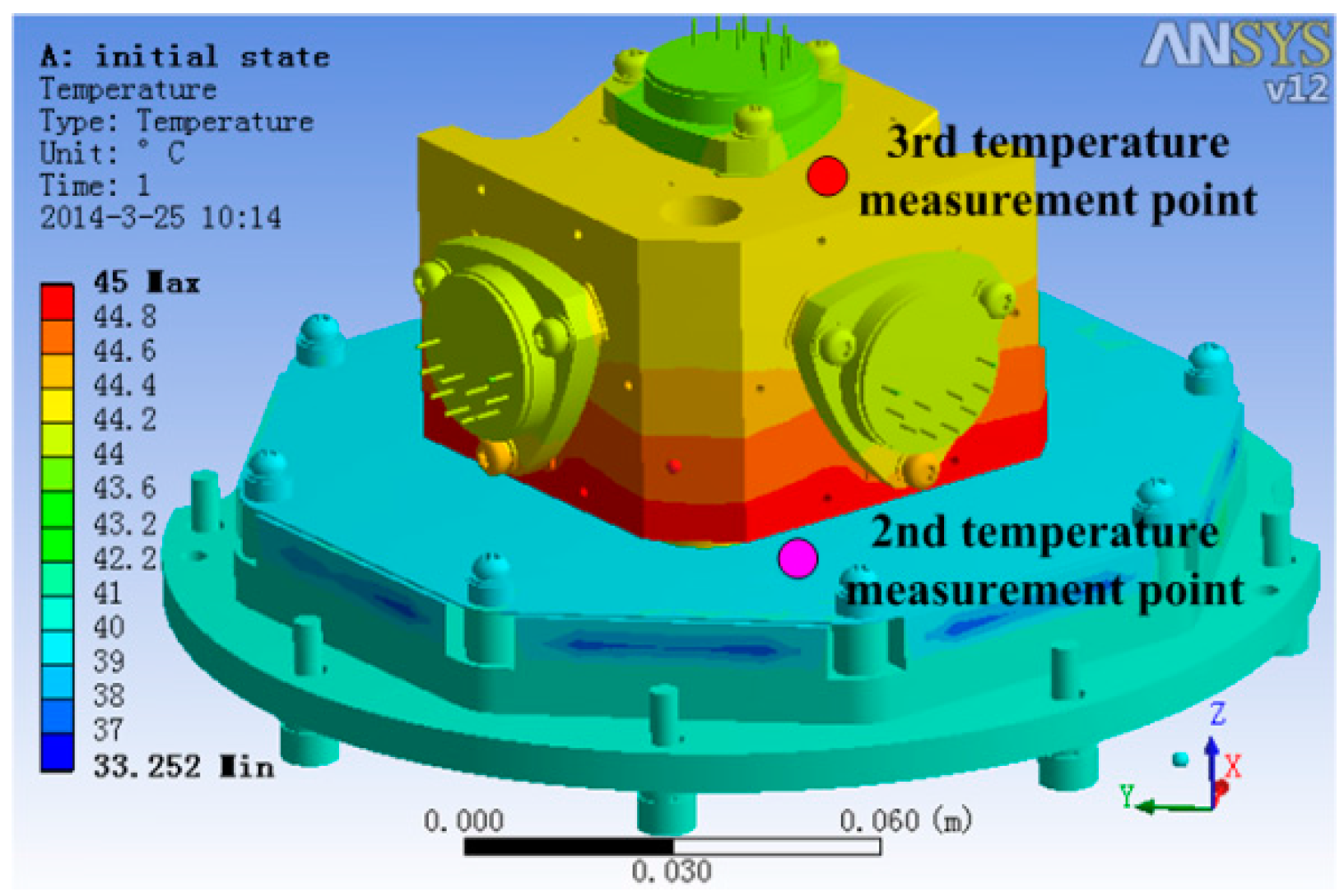
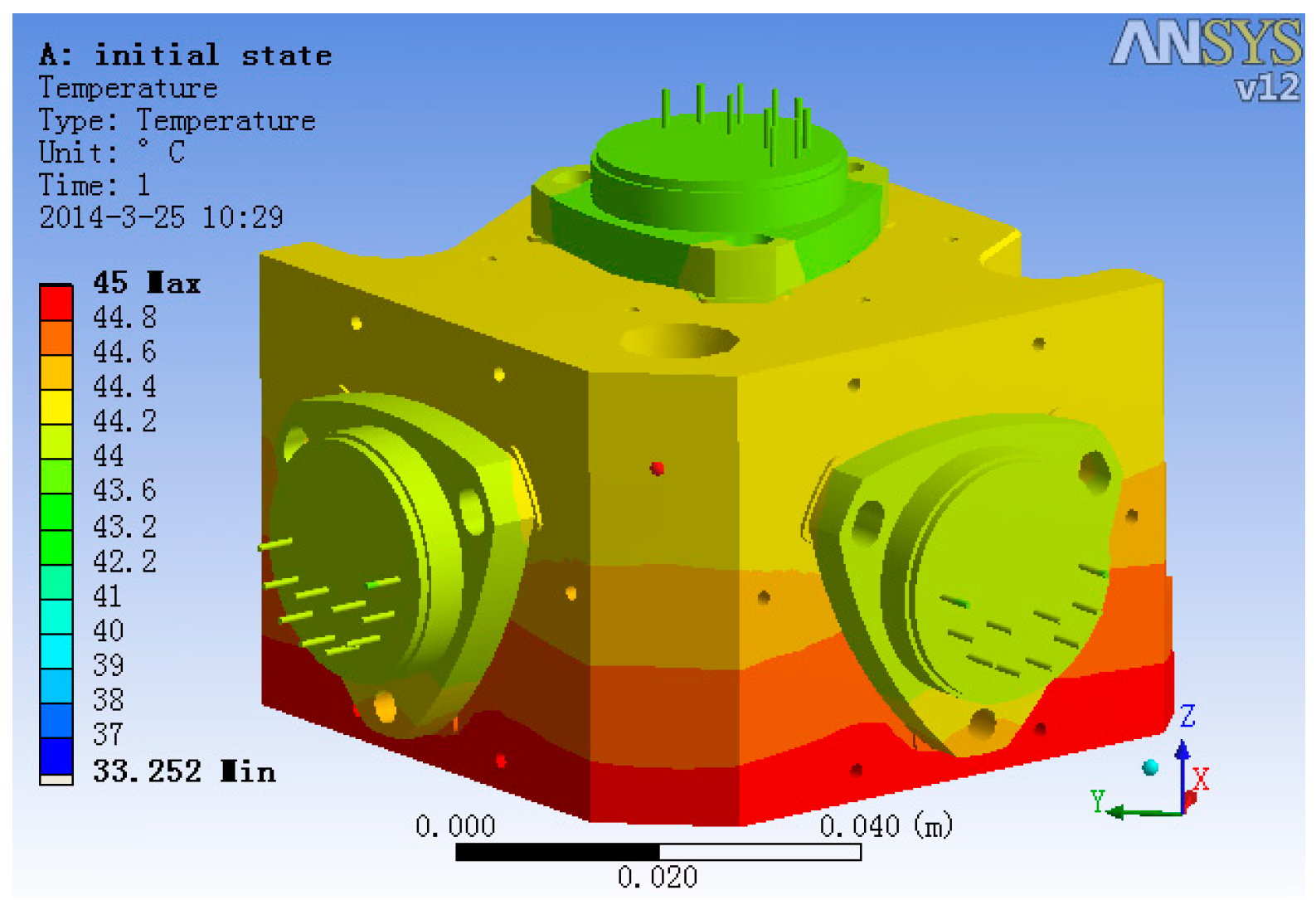
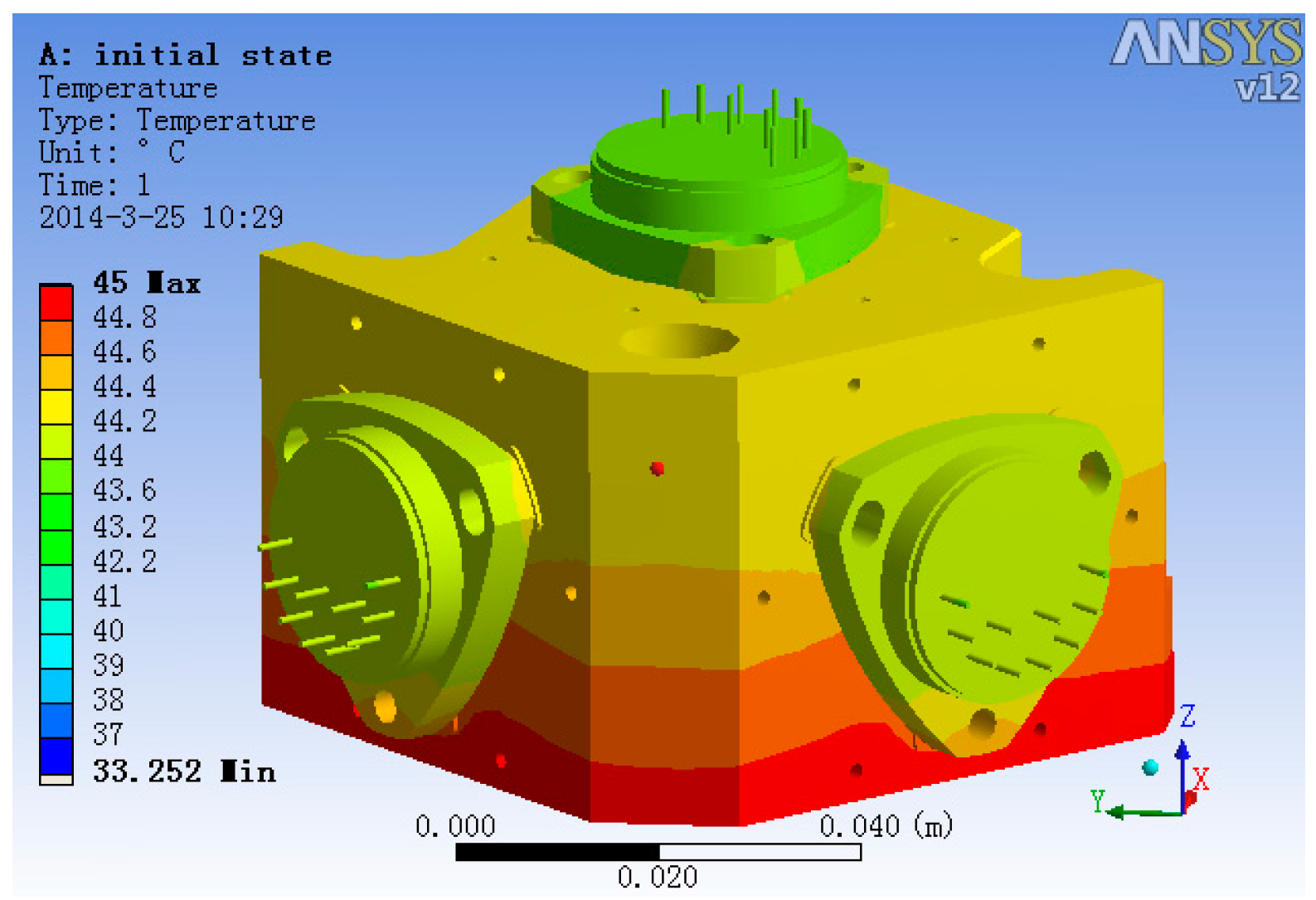
To decide the temperature measurement point in the 2nd and 3rd level temperature control units, ANSYS was used to analyze the temperature field. The temperature field simulation result is shown in
Figure 13. In the analysis, the 2nd level heating temperature is set at 40 °C and that of 3rd level is 45 °C. From the simulation results, it is obvious that the temperature of accelerometer unit foundation bed’s top surface and the temperature of the accelerometer base’s top surface are relatively uniform. Thus, setting the 2nd level temperature control system temperature measurement point on the accelerometer unit foundation bed’s top surface and setting the 3rd level temperature control system temperature measurement point on the accelerometer base’s top surface is better than setting it on other places, because the single point represents the temperature of the whole surface on those surfaces and makes the control system’s input reflect the temperature change of the whole unit.
Figure 13.
The steady-state temperature field of the accelerometer unit.
Figure 13.
The steady-state temperature field of the accelerometer unit.
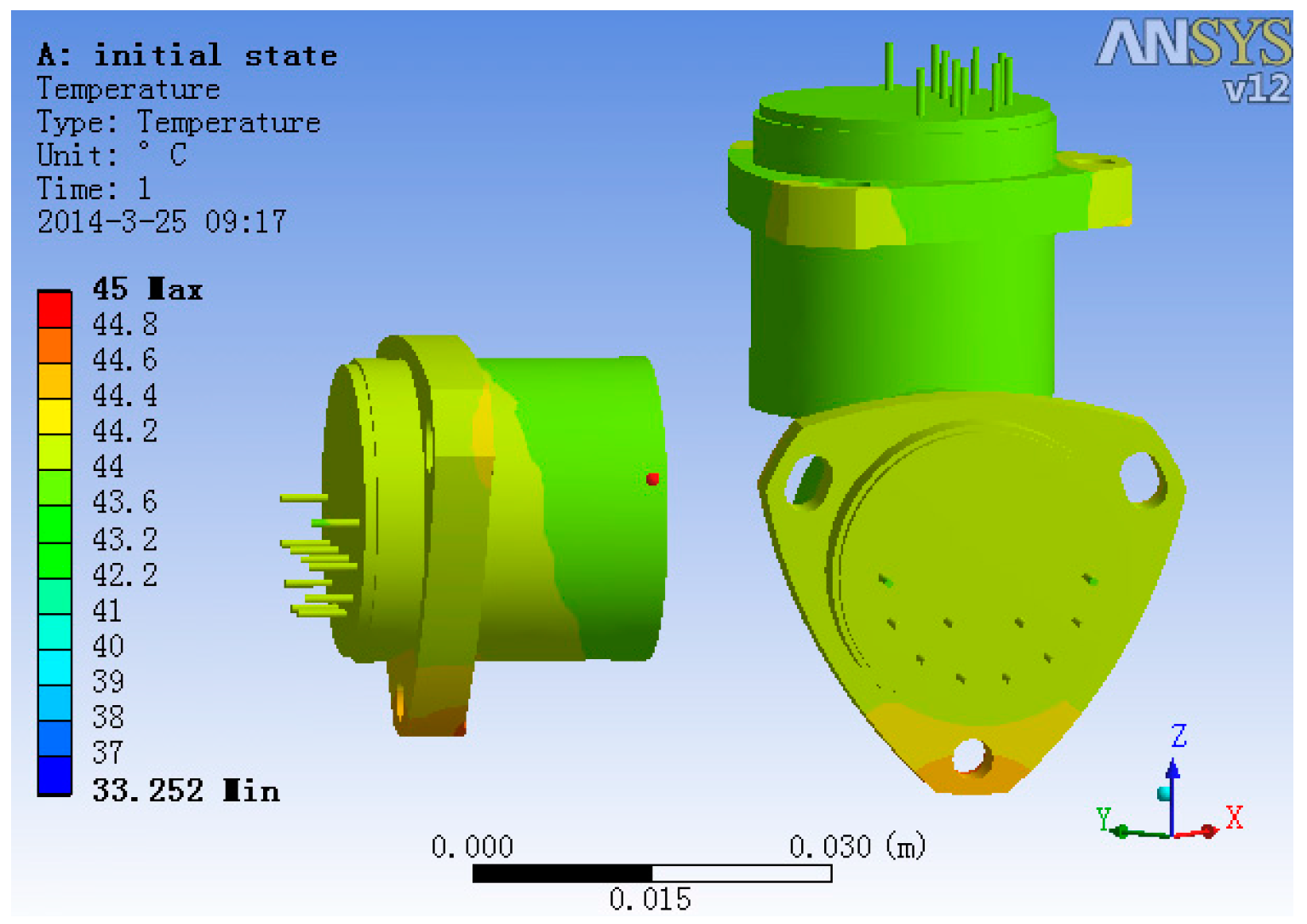
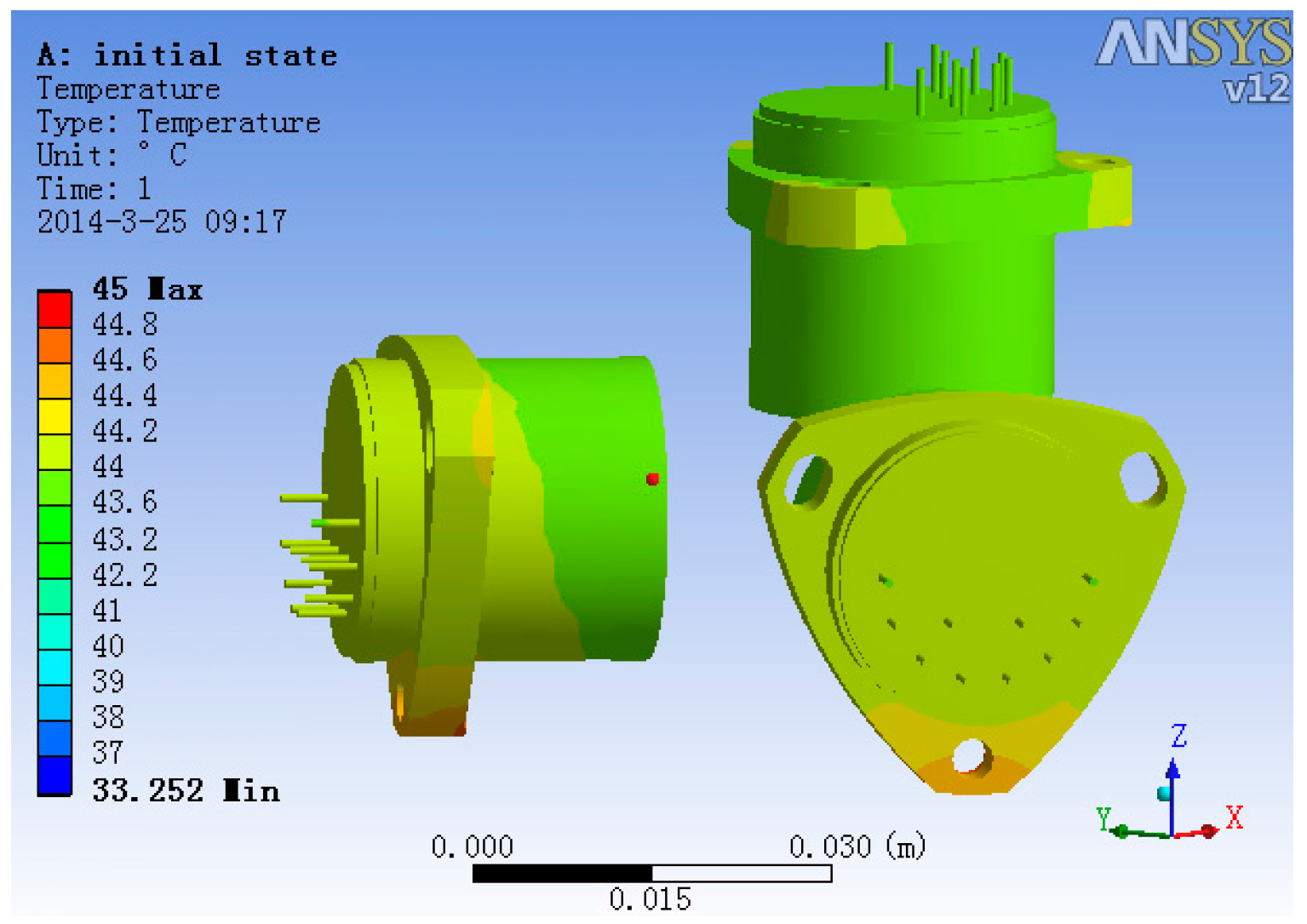
Hiding all other structures and with heater open, the steady-state temperature field of accelerometer’s base and three accelerometers is shown in
Figure 14. From
Figure 14, we can get the information that the temperature gradient of the two lateral accelerometers is much larger than that of the plumb accelerometer, and the max temperature difference of the two lateral accelerometers head is 0.15 °C, while the max temperature difference of the plumb accelerometer head is 0.05 °C.
Figure 14.
The steady-state temperature field of the accelerometer base.
Figure 14.
The steady-state temperature field of the accelerometer base.
The temperature field of the three accelerometers is shown in
Figure 15. It is evident that the plumb accelerometer body’s temperature field is much more consistent than that of the two lateral accelerometers, of which the max temperature difference is 0.44 °C, while the plumb accelerometer body’s max temperature difference is 0.18 °C.
Figure 15.
The temperature field of the three accelerometers.
Figure 15.
The temperature field of the three accelerometers.
The analysis results show that the temperature control methods significantly improve the uniformity of the temperature field of the accelerometers compared with the accelerometer temperature data in general conditions [
9], which benefits the stability of the accelerometer’s output.
3.3. The Optimized Design of the 2nd and 3rd Level Temperature Control
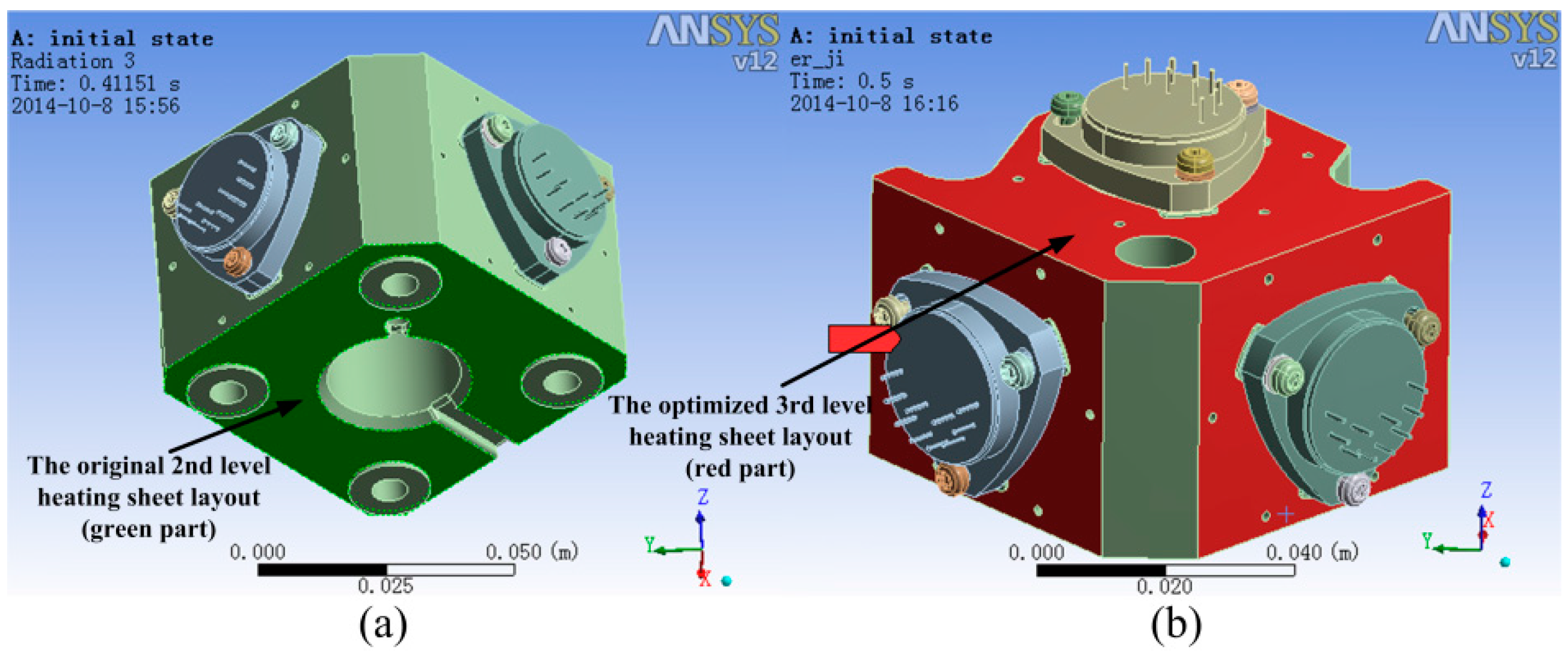
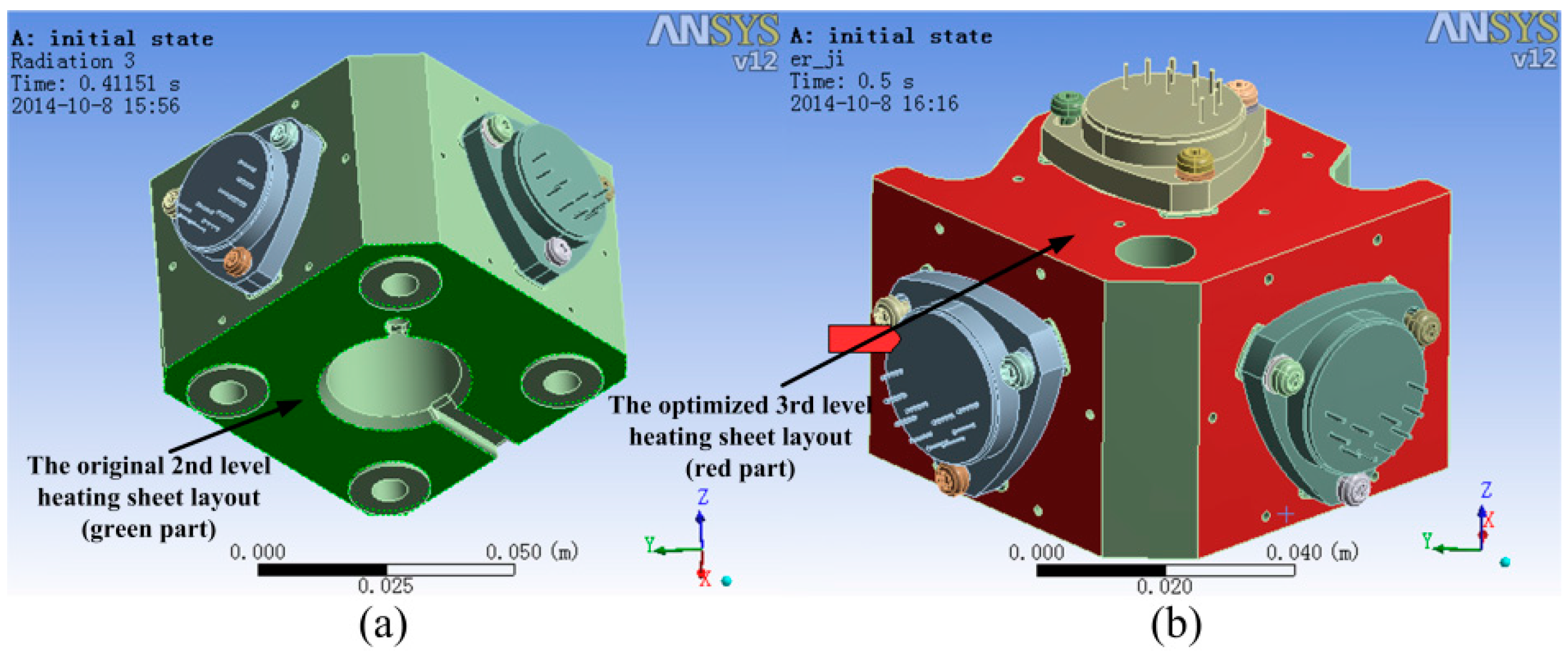
In order to minimize the temperature gradient, we should optimize the layout of the heating sheet. The original 3rd level heating sheet is deployed on the bottom of the accelerometer base, as shown in
Figure 16a. The optimized deployment of the second-level heat sheet is shown in
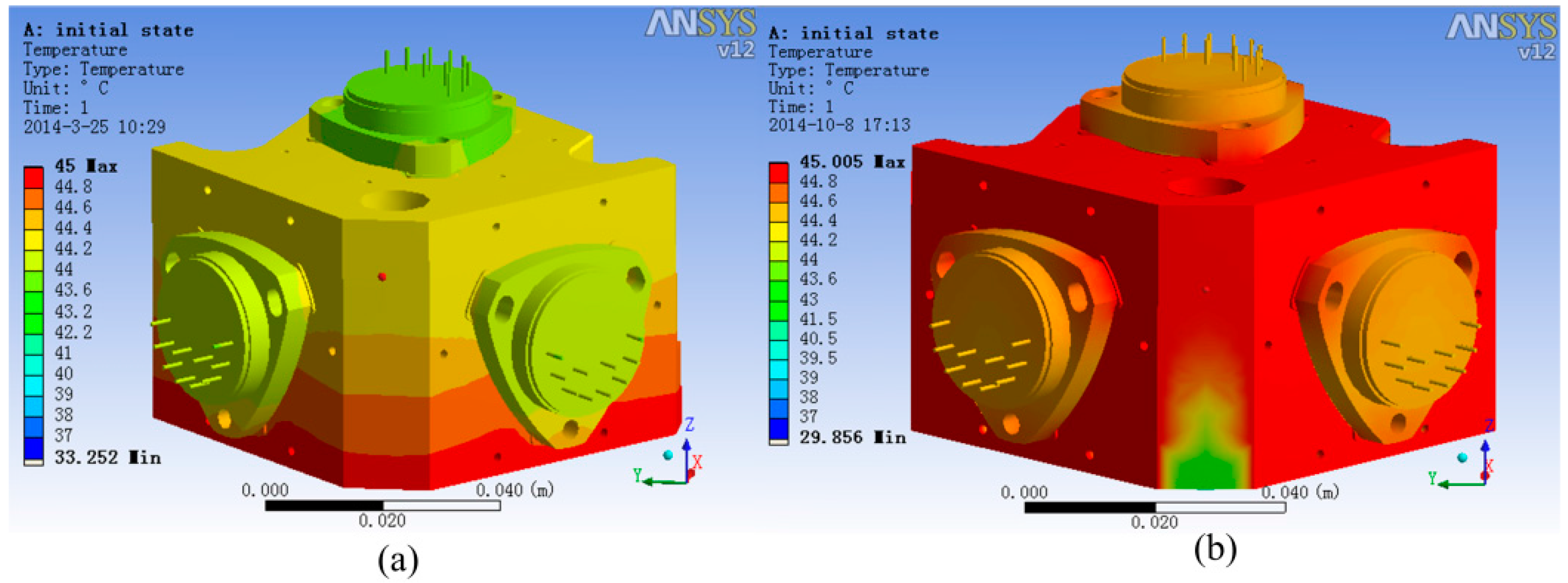
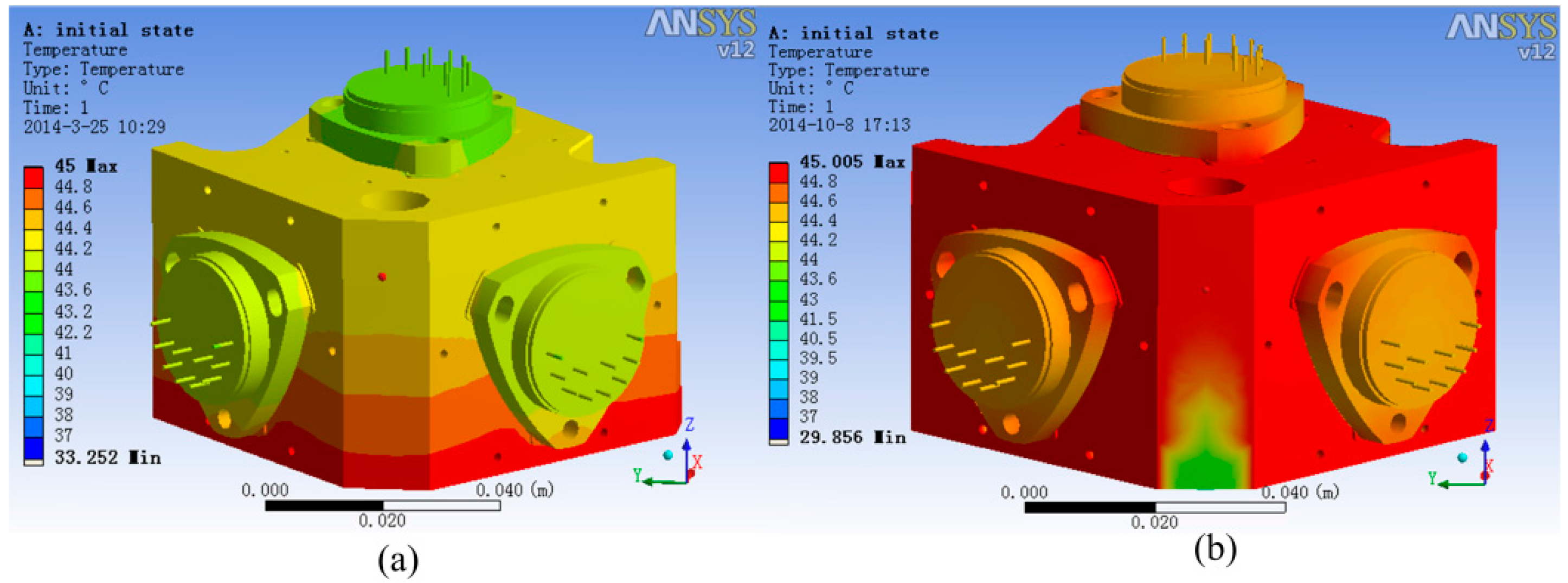
Figure 16b. The temperature field comparison of the accelerometer unit using ANSYS, is shown in
Figure 17. Comparing the temperature field in the original layout with the optimized one, the newly deployed scheme can significantly lessen the temperature difference in the two lateral accelerometers, so that the temperature field can be more homogeneous. The detailed datum of temperature differences in the two deployment scheme is shown in
Table 2.
Figure 16.
(a) The original deployment of 3rd level heating sheet layout (high light green part); (b) The optimized deployment of 3rd level heating sheet layout (high light red part).
Figure 16.
(a) The original deployment of 3rd level heating sheet layout (high light green part); (b) The optimized deployment of 3rd level heating sheet layout (high light red part).
Figure 17.
(a) The original temperature field; (b) The optimized temperature field.
Figure 17.
(a) The original temperature field; (b) The optimized temperature field.
Table 2.
Temperature differences in the two layout method.
Table 2.
Temperature differences in the two layout method.
| Layout Method | Two Lateral Accelerometers Max Temperature Difference | Plumb Accelerometers Max Temperature Difference |
|---|
| The original | 0.44 °C | 0.18 °C |
| The optimized | 0.21 °C | 0.17 °C |
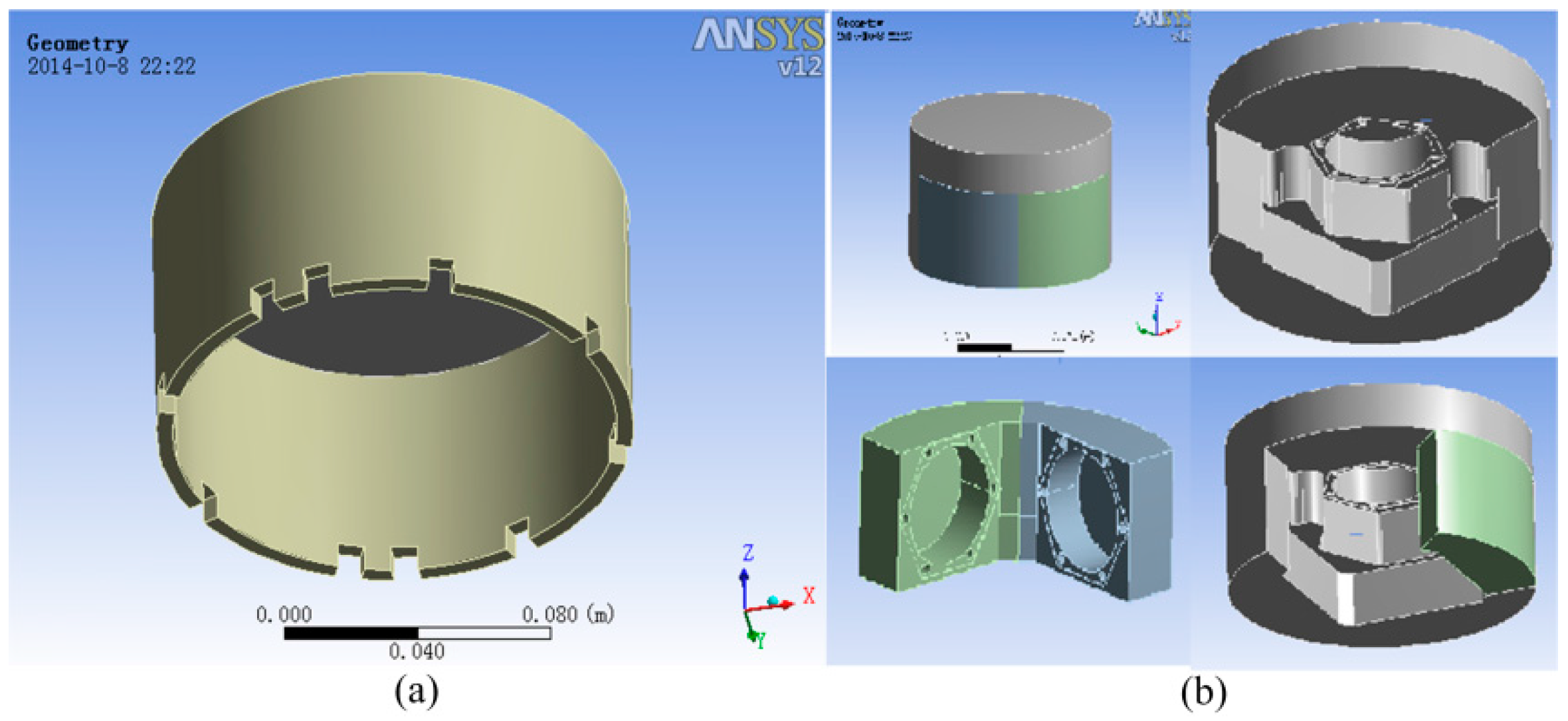
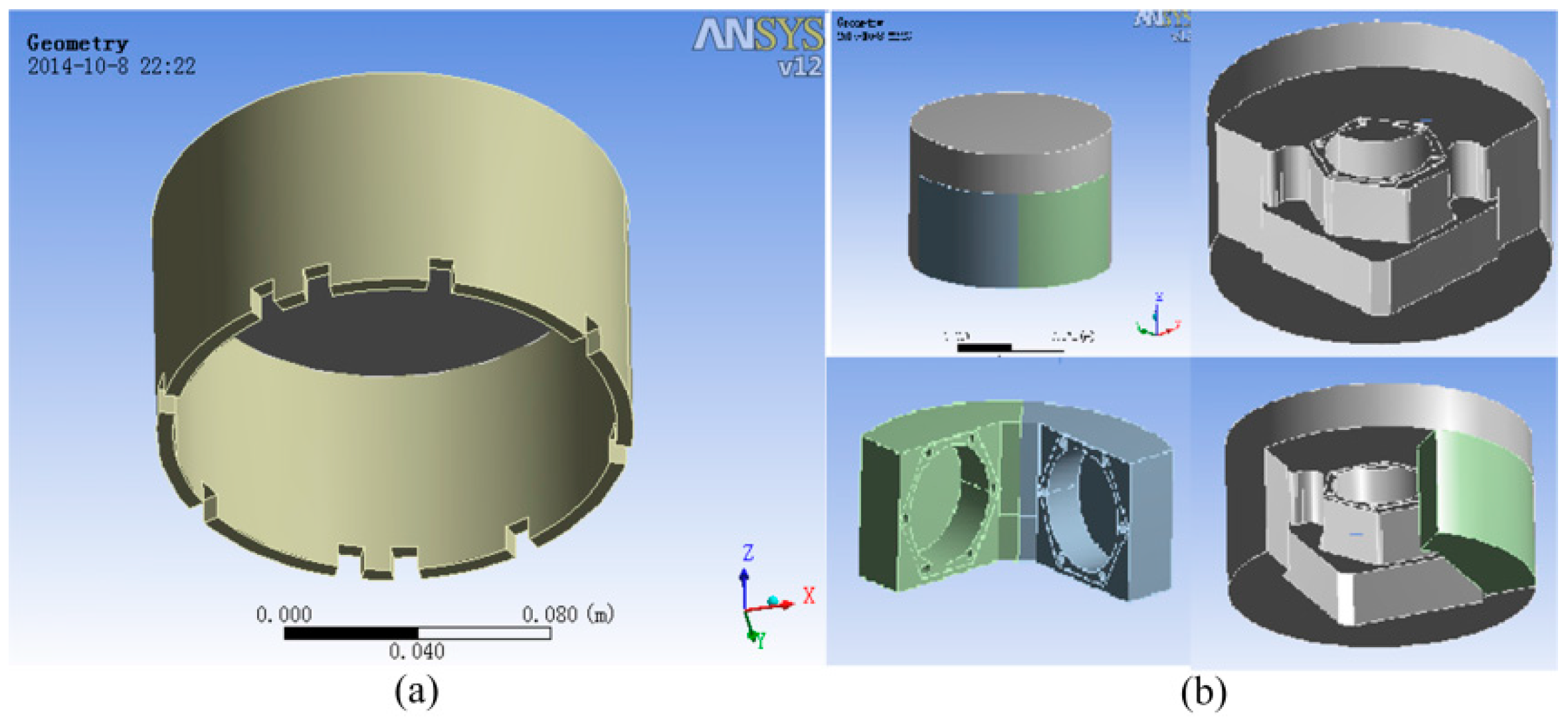
Besides using a new heating sheet layout to reduce the temperature gradient of accelerometer unit, intensifying the heat insulation is another good method. The heat insulating layer currently used in the accelerometer unit is shown in
Figure 18a.
Figure 18.
(a) The original heat insulating layer; (b) The optimized heat insulating layer.
Figure 18.
(a) The original heat insulating layer; (b) The optimized heat insulating layer.
As seen in
Figure 18, there is a large amount of air in the whole unit and the air’s heat transfer conditions are relatively complex, which can influence the temperature stability. The optimized heating layout is shown in
Figure 18b and the material used in the two structures is the same (thermal conductivity ≤ 0.03 W/m·k). The mold with an optimized heat insulating structure and low coefficient of thermal coefficient coats the accelerometer unit. The new insulating structure reduces the amount of air in the unit and increases the thickness of insulating layer, so it is conducive to the temperature stability of the accelerometers.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}