
AMA- and RWE- Based Adaptive Kalman Filter for Denoising Fiber Optic Gyroscope Drift Signal

Abstract
:1. Introduction
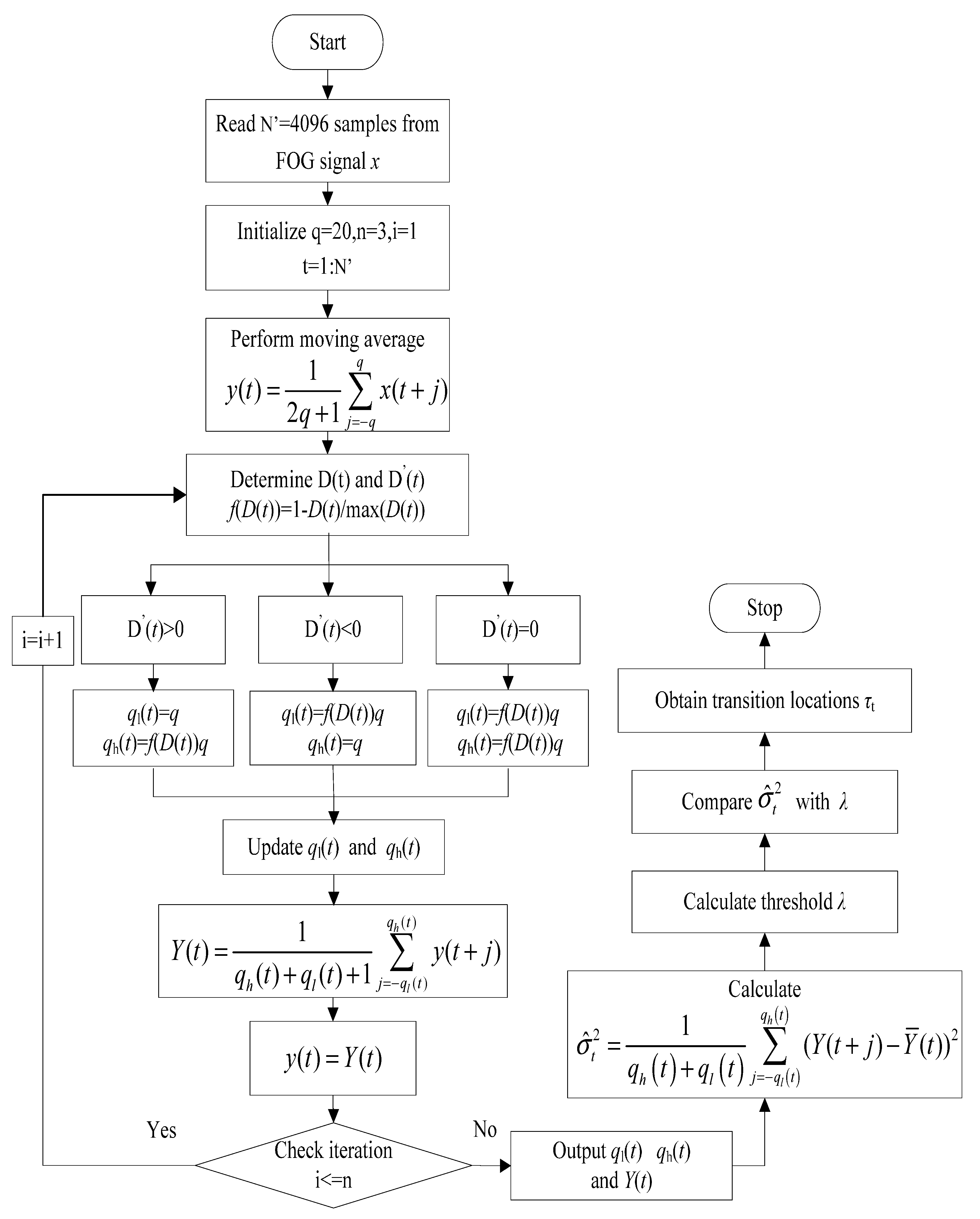
2. Concept of Adaptive Moving Average
3. Principle of Random Weighting Estimation
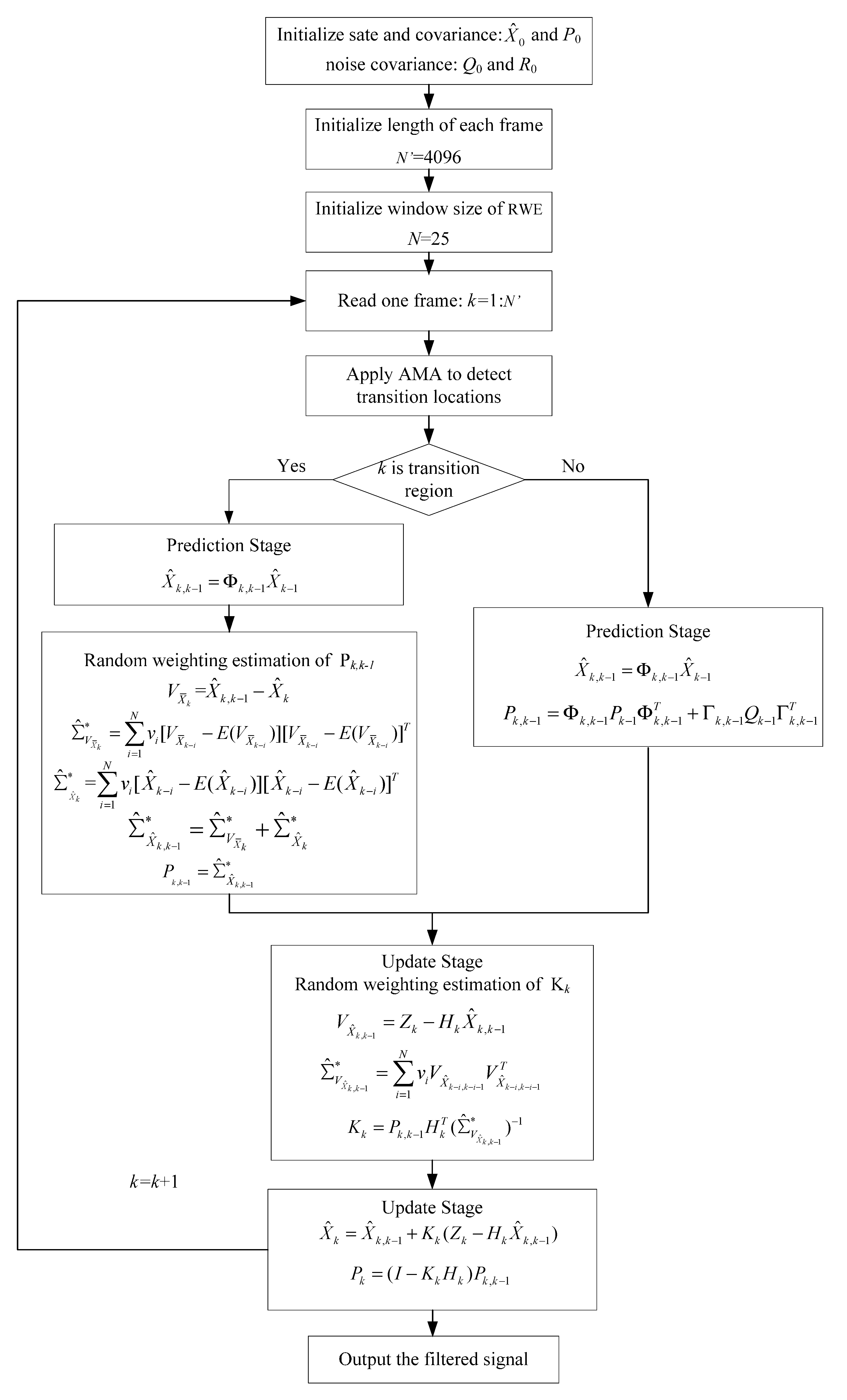
4. Adaptive Kalman Filtering
4.1. Conventional Kalman Filter
4.2. Random Weighting Estimation for Kalman Gain
4.3. Random Weighting Estimation for Covariance Matrix of Predicted State Vector
5. Experimental Results and Discussions
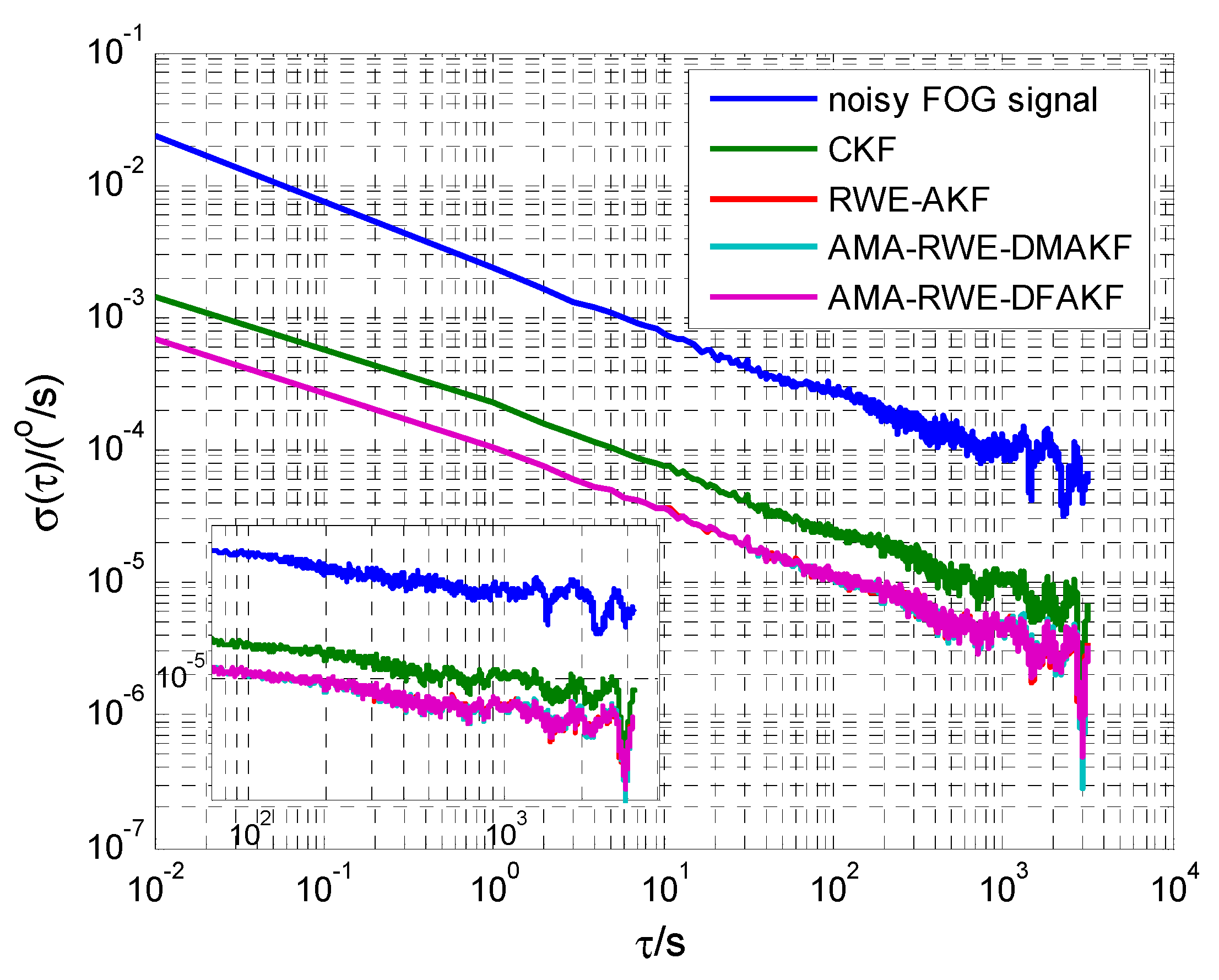
5.1. Static Test Analysis



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Q (μrad) | N (o/) | B (o/h) | K (o/) | R (o/h2) |
|---|---|---|---|---|---|
| Input | - | 2.829 × 10−3 | 4.065 × 10−4 | - | - |
| CKF | - | 1.446 × 10−4 | 4.969 × 10−6 | - | - |
| RWE-AKFG | - | 6.702 × 10−5 | 2.398 × 10−6 | - | - |
| AMA-RWE-DMAKF | - | 6.711 × 10−5 | 2.282 × 10−6 | - | - |
| AMA-RWE-DFAKF | - | 6.705 × 10−5 | 2.264 × 10−6 | - | - |
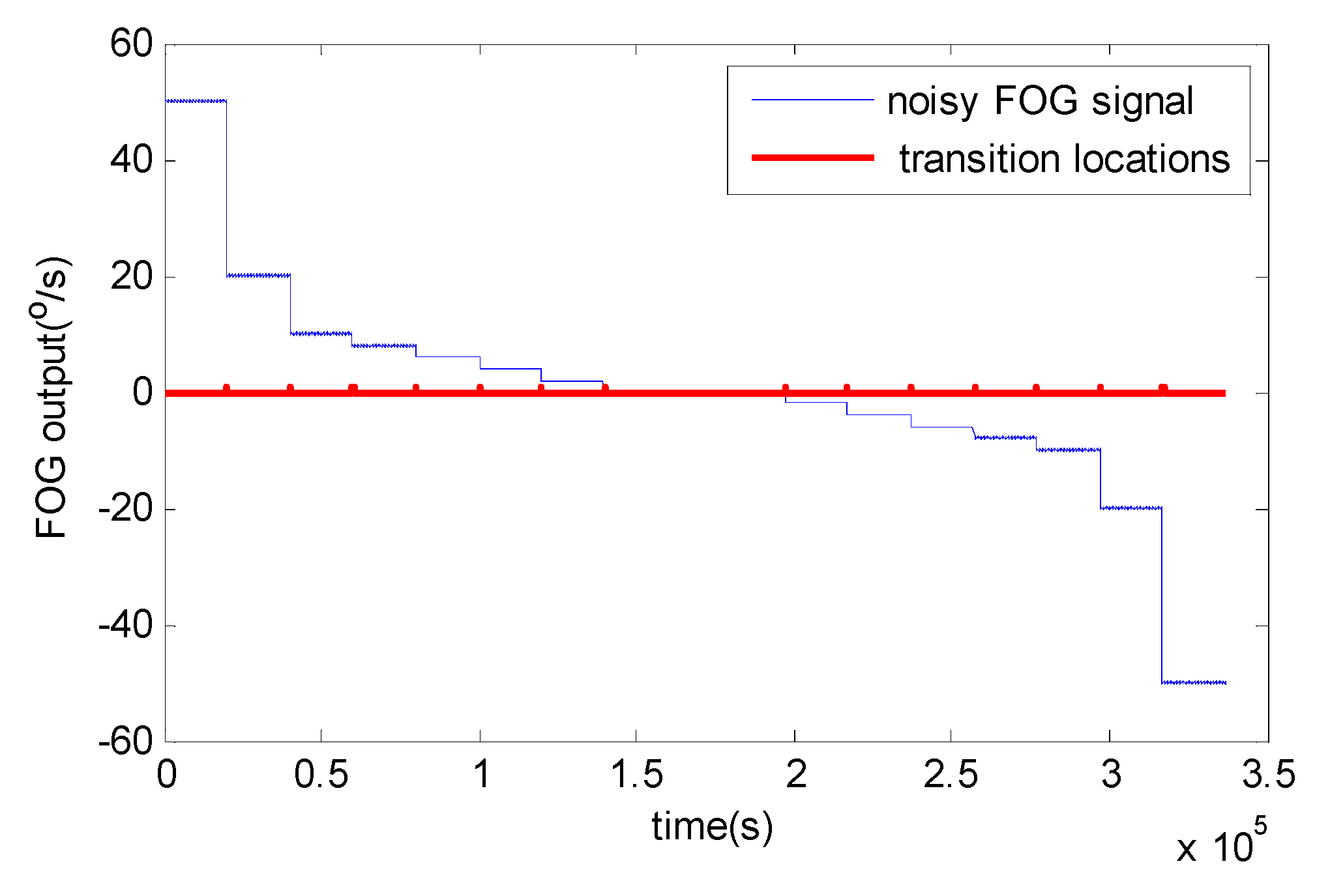
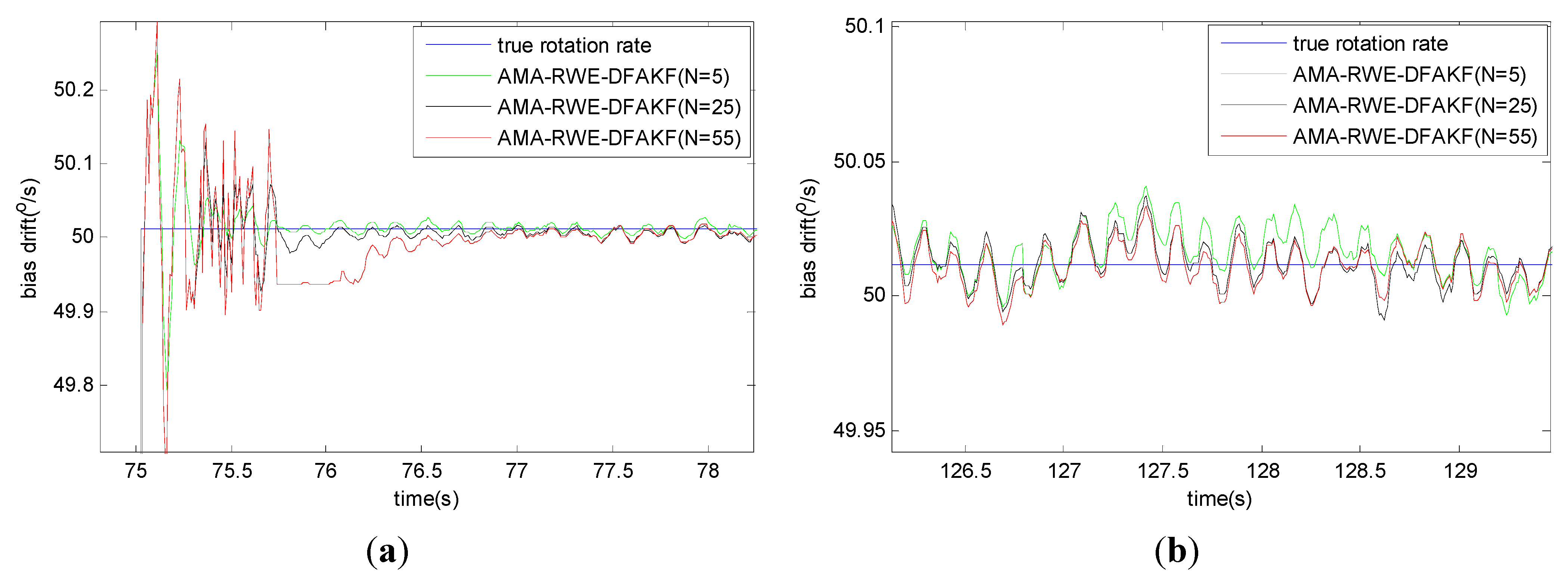
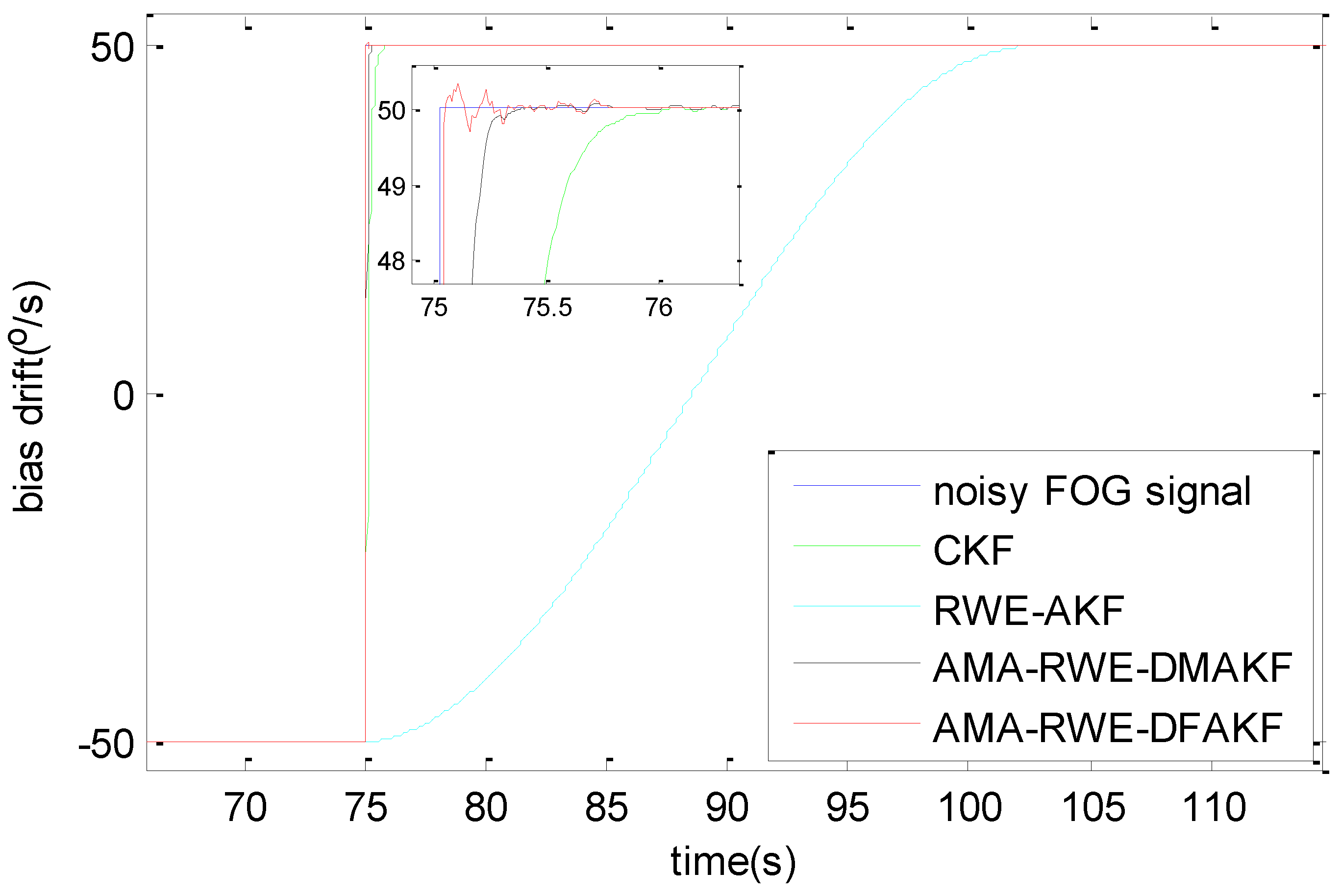
5.2. Dynamic Test Analysis
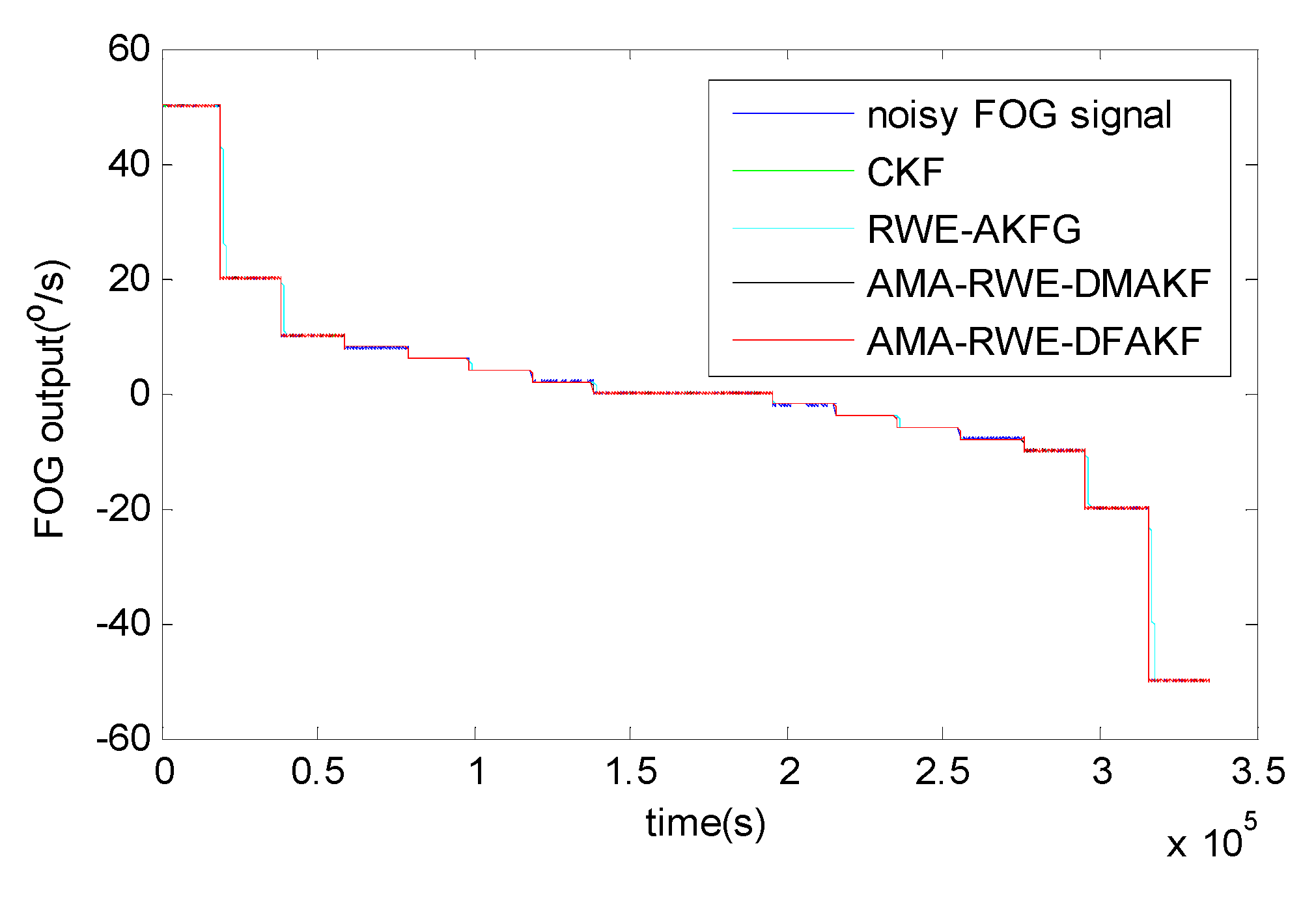
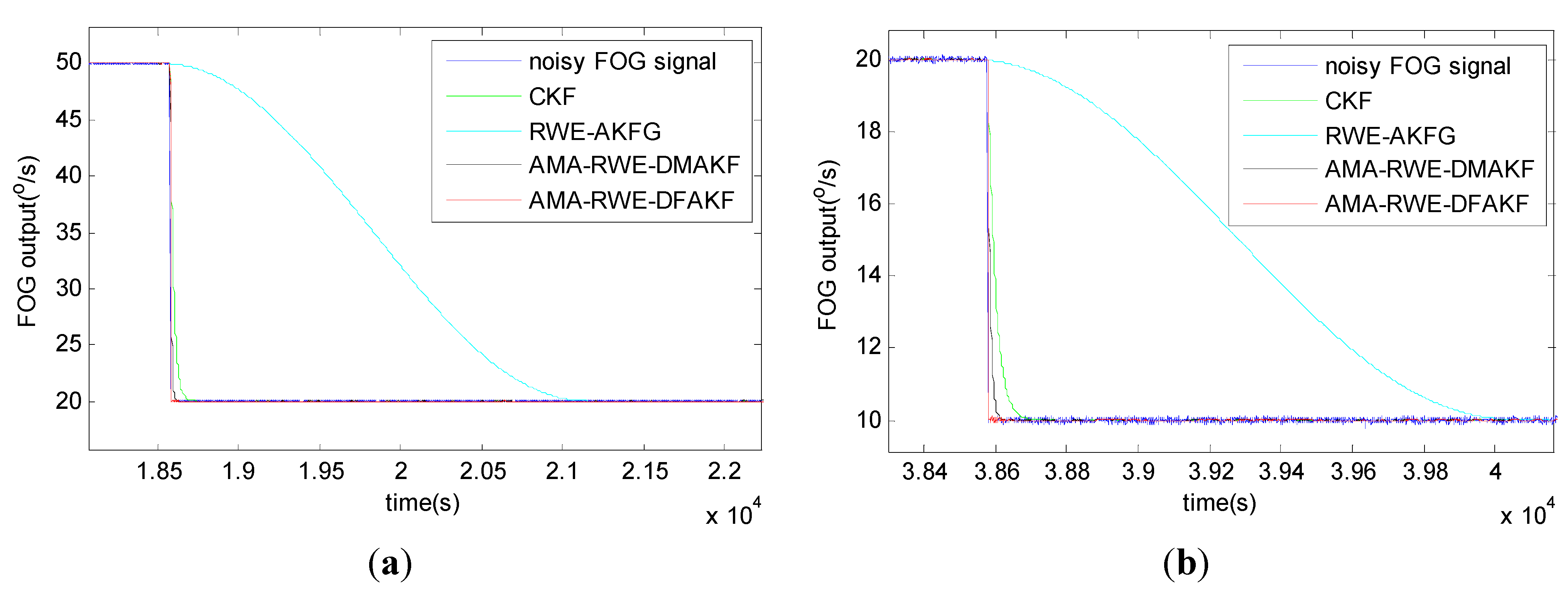
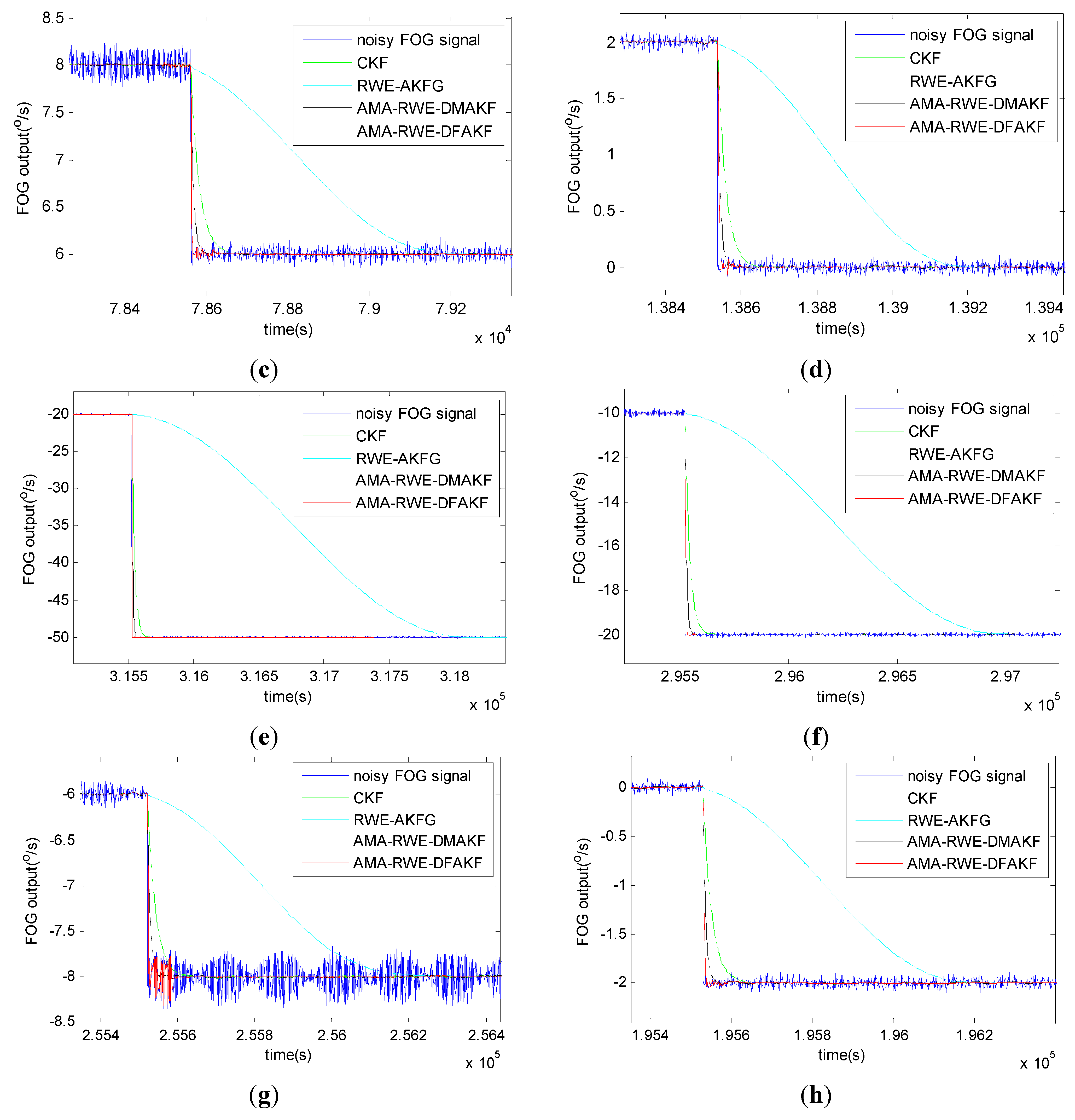
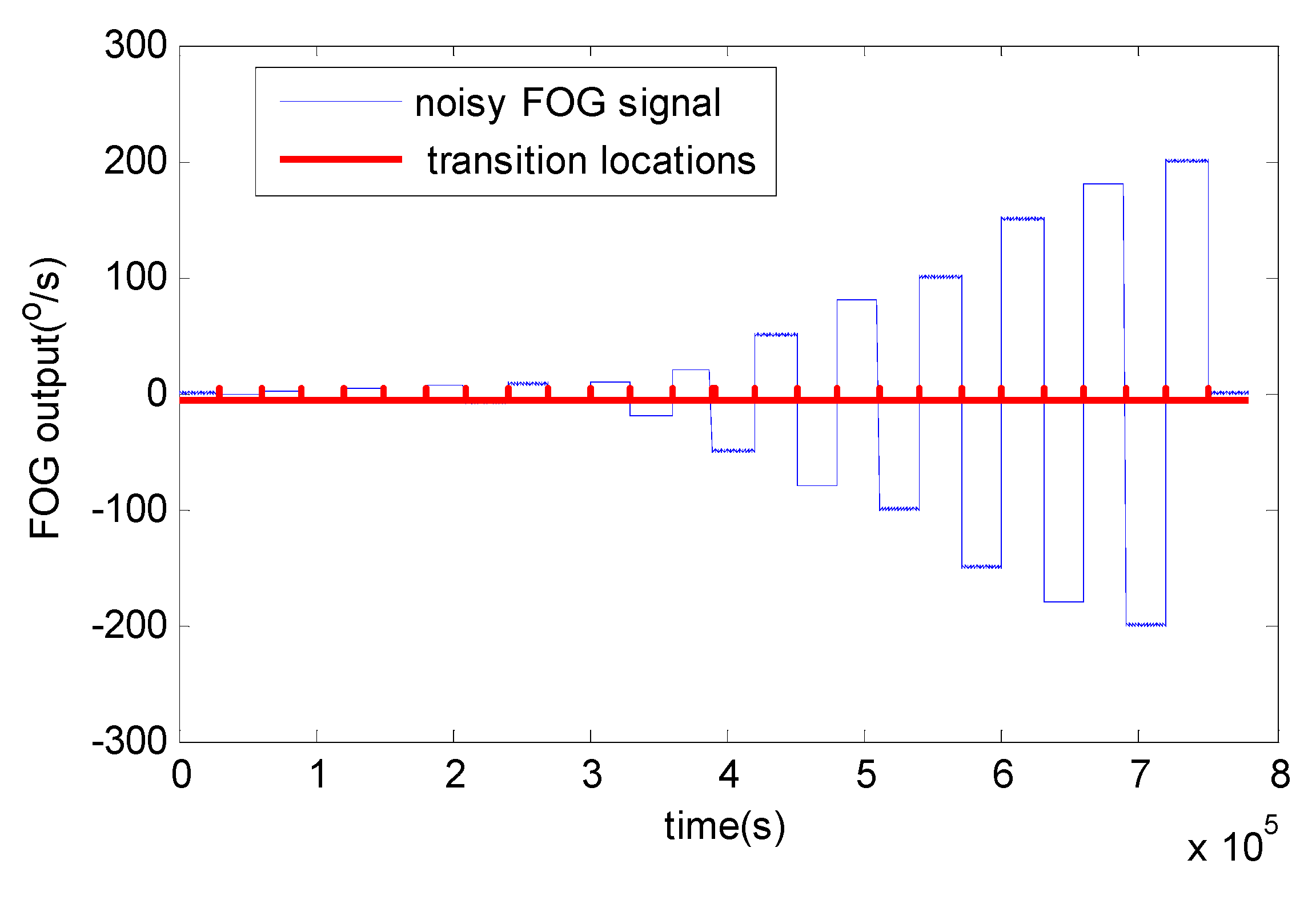
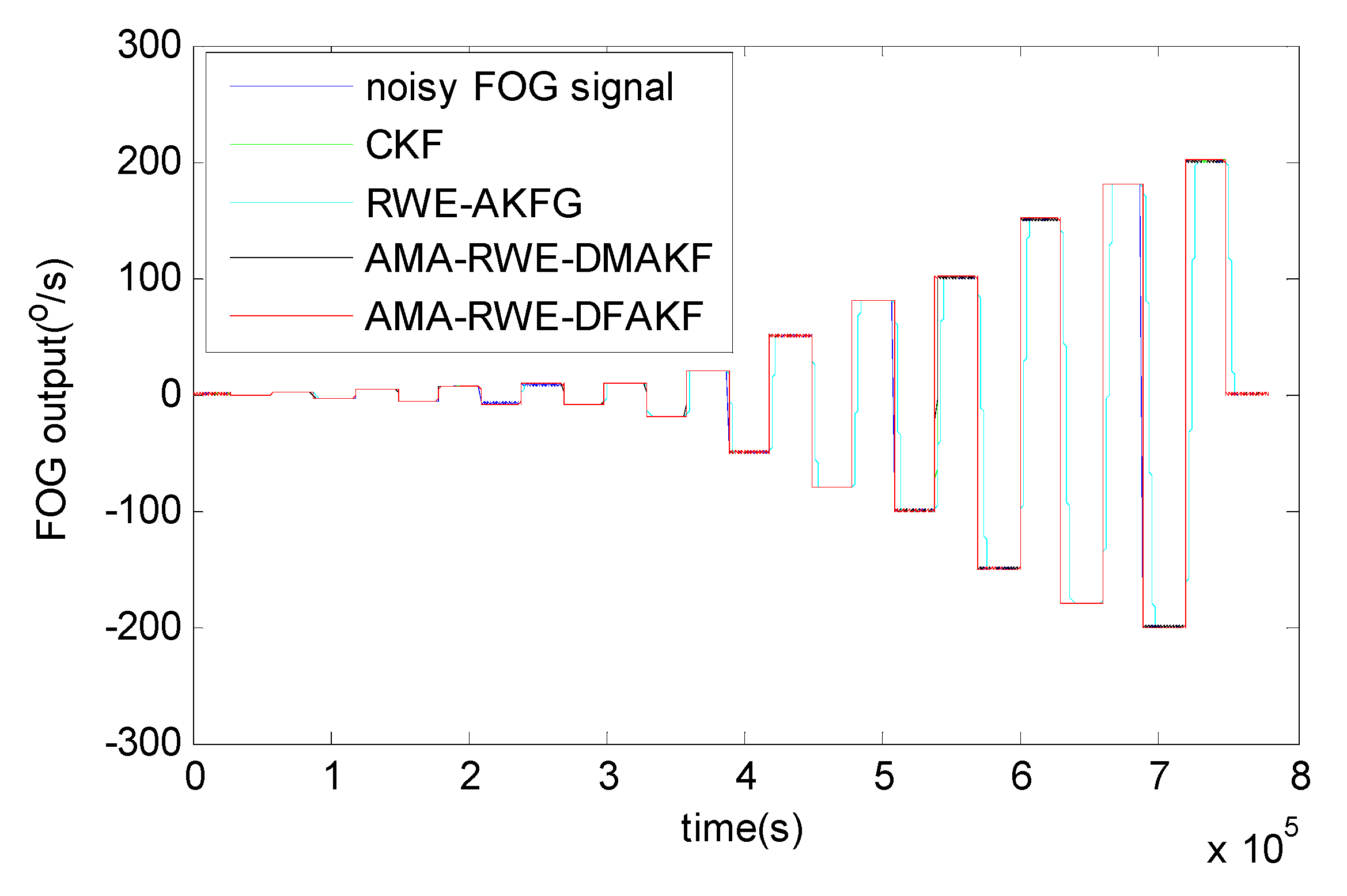
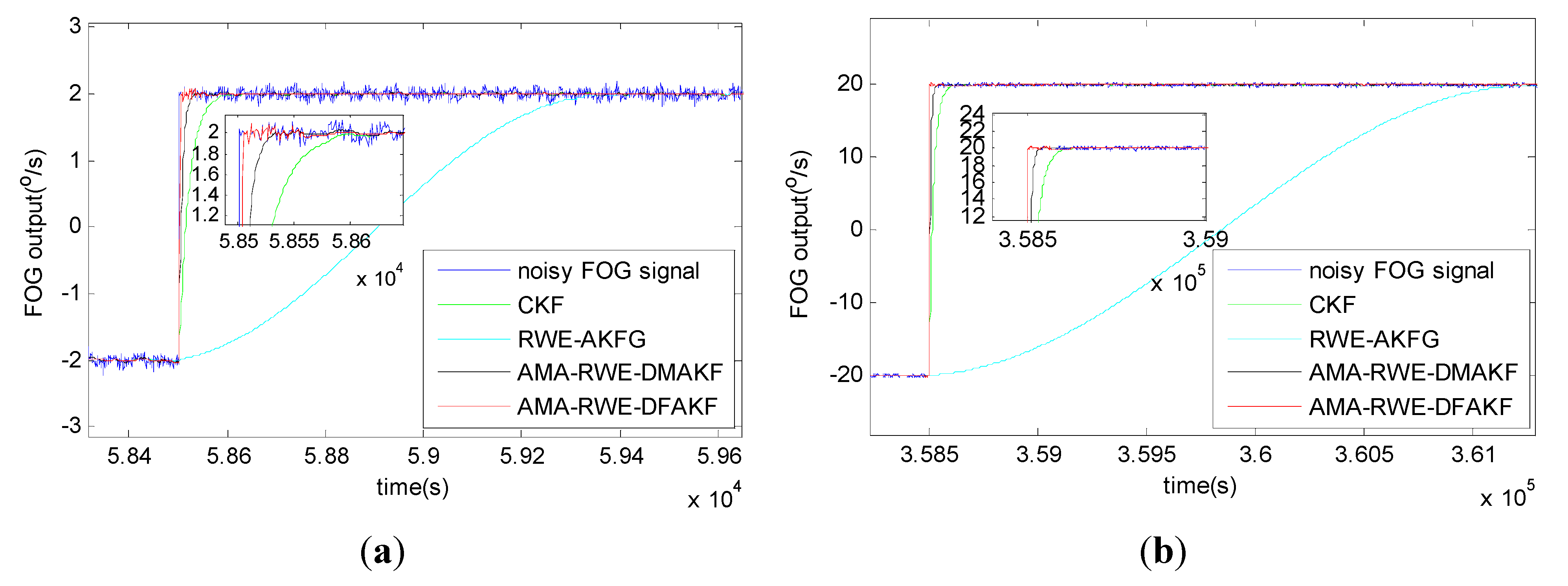
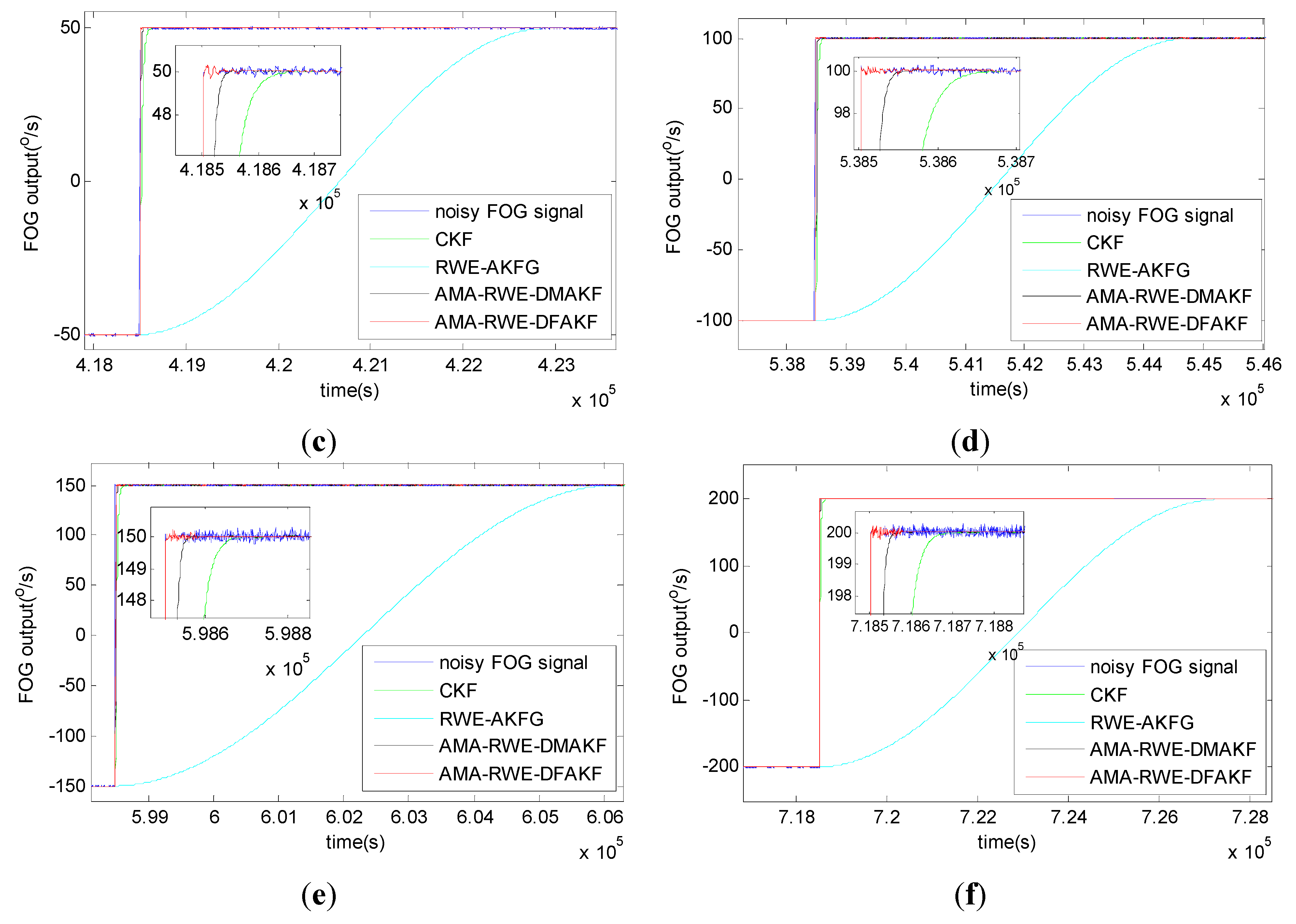
| Rotation (°/s) | Input | CKF | RWE-AKFG | AMA-RWE-DMAKF | AMA-RWE-DFAKF |
|---|---|---|---|---|---|
| +50 | 0.0384 | 0.0055 | 0.0040 | 0.0040 | 0.0040 |
| +20 | 0.0462 | 0.0071 | 4.6724 | 0.0056 | 0.0038 |
| +10 | 0.0573 | 0.0067 | 0.7951 | 0.0055 | 0.0036 |
| +8 | 0.1145 | 0.0064 | 0.0103 | 0.0064 | 0.0032 |
| +6 | 0.0515 | 0.0069 | 0.0071 | 0.0056 | 0.0037 |
| +4 | 0.0403 | 0.0071 | 0.0095 | 0.0054 | 0.0038 |
| +2 | 0.0358 | 0.0070 | 0.0097 | 0.0052 | 0.0037 |
| 0 | 0.0351 | 0.0073 | 0.0087 | 0.0054 | 0.0040 |
| 0 | 0.0349 | 0.0072 | 0.0039 | 0.0053 | 0.0039 |
| −2 | 0.0366 | 0.0073 | 0.0102 | 0.0055 | 0.0040 |
| −4 | 0.0441 | 0.0071 | 0.0102 | 0.0055 | 0.0046 |
| −6 | 0.0657 | 0.0069 | 0.0102 | 0.0058 | 0.0037 |
| −8 | 0.1552 | 0.0069 | 0.0117 | 0.0075 | 0.0040 |
| −10 | 0.0778 | 0.0068 | 0.0071 | 0.0060 | 0.0037 |
| −20 | 0.0402 | 0.0072 | 0.7679 | 0.0055 | 0.0039 |
| −50 | 0.0369 | 0.0072 | 4.6649 | 0.0054 | 0.0039 |
| Rotation(°/s) | Input | CKF | RWE-AKFG | AMA-RWE-DMAKF | AMA-RWE-DFAKF |
|---|---|---|---|---|---|
| 0 | 0.0566 | 0.0087 | 0.0056 | 0.0056 | 0.0055 |
| −2 | 0.0633 | 0.0165 | 0.0138 | 0.0082 | 0.0063 |
| +2 | 0.0637 | 0.0163 | 0.0137 | 0.0081 | 0.0062 |
| −4 | 0.1208 | 0.0233 | 0.0221 | 0.0087 | 0.0067 |
| +4 | 0.1215 | 0.0234 | 0.0237 | 0.0150 | 0.0075 |
| −6 | 0.1375 | 0.0205 | 0.0809 | 0.0186 | 0.0075 |
| +6 | 0.1393 | 0.0208 | 0.1616 | 0.0187 | 0.0083 |
| −8 | 0.1619 | 0.0210 | 0.2794 | 0.0176 | 0.0081 |
| +8 | 0.1635 | 0.0204 | 0.4068 | 0.0170 | 0.0072 |
| −10 | 0.1694 | 0.0215 | 0.5742 | 0.0175 | 0.0079 |
| +10 | 0.1681 | 0.0197 | 0.7436 | 0.0163 | 0.0074 |
| −20 | 0.1317 | 0.0239 | 1.8871 | 0.0213 | 0.0085 |
| +20 | 0.1300 | 0.0226 | 3.3568 | 0.0201 | 0.0081 |
| −50 | 0.1327 | 0.0174 | 8.8623 | 0.0156 | 0.0067 |
| +50 | 0.1214 | 0.0161 | 15.5376 | 0.0153 | 0.0066 |
| −80 | 0.1138 | 0.0118 | 23.1207 | 0.0107 | 0.0059 |
| +80 | 0.1082 | 0.0117 | 31.3297 | 0.0109 | 0.0059 |
| −100 | 0.1000 | 0.0114 | 37.0857 | 0.0098 | 0.0054 |
| +100 | 0.0958 | 0.0111 | 43.3255 | 0.0096 | 0.0051 |
| −150 | 0.0972 | 0.0100 | 59.1451 | 0.0096 | 0.0053 |
| +150 | 0.0968 | 0.0102 | 76.2005 | 0.0097 | 0.0052 |
| −180 | 0.1041 | 0.0098 | 86.9188 | 0.0086 | 0.0052 |
| +180 | 0.1049 | 0.0099 | 97.8416 | 0.0087 | 0.0054 |
| −200 | 0.1107 | 0.0096 | 105.2709 | 0.0085 | 0.0049 |
| +200 | 0.1106 | 0.0109 | 112.7862 | 0.0088 | 0.0053 |
| 0 | 0.0563 | 0.0103 | 43.2174 | 0.0087 | 0.0055 |
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bergh, R.A.; Lefevre, H.C.; Shaw, H.J. An overview of fiber-optic gyroscopes. J. Lightw. Technol. 1984, 2, 91–107. [Google Scholar] [CrossRef]
- Nayak, J. Fiber-optic gyroscopes: from design to production. Appl. Opt. 2011, 50, 152–161. [Google Scholar] [CrossRef]
- Kurbatov, A.M.; Kurbatov, R.A. Methods of improving the accuracy of fiber-optic gyros. Gyroscopy Navig. 2012, 3, 132–143. [Google Scholar] [CrossRef]
- IEEE standard speciation format guide and test procedure for single-Axis interferometric fiber optic gyros. IEEE Std. 1998. [CrossRef]
- Song, N.F.; Yuan, R.; Jin, J. Autonomous estimation of Allan variance coefficients of onboard fiber optic gyro. J. Instrum. 2011, 6, 09005. [Google Scholar] [CrossRef]
- Hu, K.B.; Liu, Y.X. Adaptive noise cancellation method for fiber optic gyroscope. Procedia Eng. 2012, 29, 1338–1343. [Google Scholar] [CrossRef]
- Sabat, S.L.; Giribabu, N.; Nayak, J.; Krishnaprasad, K. Characterization of fiber optics gyro and noise compensation using discrete wavelet transform. In Proceedings of the 2nd International Conference on Emerging Trends in Engineering and Technology (ICETET), Nagpur, India, 16–18 December 2009; pp. 909–913.
- Qian, H.M.; Ma, J.C. Research on fiber optic gyro signal de-noising based on wavelet packet soft-threshold. J. Syst. Eng. Electron. 2009, 20, 607–612. [Google Scholar]
- Dang, S.W.; Tian, W.F.; Qian, F. EMD- and LWT-based stochastic noise eliminating method for fiber optic gyro. Measurement 2011, 44, 2190–2193. [Google Scholar] [CrossRef]
- Gan, Y.; Sui, L.F.; Wu, J.F.; Wang, B.; Zhang, Q.H.; Xiao, G.R. An EMD threshold denoising method for inertial sensors. Measurement 2014, 49, 34–41. [Google Scholar] [CrossRef]
- Yang, G.L.; Liu, Y.Y.; Wang, Y.Y.; Zhu, Z.L. EMD interval thresholding denoising based on similarity measure to select relevant modes. Signal Process. 2015, 109, 95–109. [Google Scholar] [CrossRef]
- Hammon, R.L. An application of random process theory to gyro drift analysis. IRE Trans. Aeronaut. Navig. Electron. 1960, 7, 84–91. [Google Scholar] [CrossRef]
- Wang, L.D.; Zhang, C.X. On-line modeling and filter of high-precise FOG signal. Opt. Electron. Eng. 2007, 34, 55–58. [Google Scholar]
- Zhou, Y.; Li, Y.; Zhang, F. Modeling method of fiber optic gyro based on AR model. Aerosp. Control Appl. 2011, 37, 55–58. [Google Scholar]
- Zhang, F. Modeling study on random error of fiber optic gyro. Appli. Mech. Mater. 2013, 239, 167–171. [Google Scholar] [CrossRef]
- Wu, X.M.; Duan, L.; Chen, W.H. A Kalman Filter approach based on random drift data of fiber optic gyro. In Proceedings of the 6th Conference on Industrial Electronics and Applications (ICIEA), Beijing, China, 21–23 June 2011; pp. 1933–1937.
- Zhang, K.Z.; Tian, W.F.; Qian, F. A novel adaptive filter mechanism for improving the measurement accuracy of the fiber optic gyroscope in maneuvering case. Meas. Sci. Technol. 2007, 18, 2777–2782. [Google Scholar] [CrossRef]
- Narasimhappa, M.; Sabat, S.L.; Peessapati, R.; Nayak, J. An improved adaptive Kalman Filter for denoising fiber optic gyro drift signal. In Proceedings of the 2013 Annual IEEE India Conference (INDICON), Mumbai, India, 13–15 December 2013; pp. 1–6.
- Narasimhappa, M.; Sabat, S.L.; Rangababu, P.; Sabat, S.L. A modified Sage-Husa adaptive Kalman Filter for denoising fiber optic gyroscope signal. In Proceedings of the 2012 Annual IEEE India Conference (INDICON), Kochi, India, 7–9 December 2012; pp. 1266–1271.
- Gao, S.S.; Gao, Y.; Zhong, Y.M.; Wei, W.H. Random weighting estimation method for dynamic navigation positioning. Chin. J. Aeronaut. 2011, 24, 318–323. [Google Scholar] [CrossRef]
- Gao, S.S.; Zhong, Y.M.; Wei, W.H.; Gu, C.F. Windowing-based random weighting fitting of systematic model errors for dynamic vehicle navigation. Inform. Sci. 2014, 282, 350–362. [Google Scholar] [CrossRef]
- Gao, S.S.; Hu, G.G.; Zhong, Y.M. Windowing and random weighting-based adaptive unscented kalman filter. Int. J. Adapt. Control 2015, 29, 201–223. [Google Scholar] [CrossRef]
- Narasimhappa, M.; Sabat, S.L.; Peessapati, R.; Nayak, J. An innovation based random weighting estimation mechanism for denoising fiber optic gyro drift signal. Optik 2014, 125, 1192–1198. [Google Scholar] [CrossRef]
- Karthik, K.P.; Rangababu, P.; Sabat, S.L.; Nayak, J. System on chip implementation of adaptive moving average based multiple-mode Kalman Filter for denoising fiber optic gyroscope signal. In Proceedings of the 2011 International Symposium on Electronic System Design (ISED), Kochi, Kerala, 19–21 December 2011; pp. 170–175.
- Rangababu, P.; Sabat, S.L.; Karthik, K.; Nayak, J.; Giribabu, N. Efficient hybrid kalman filter for denoising fiber optic gyroscope signal. Optik 2013, 124, 4549–4556. [Google Scholar]
- Rangababu, P.; Sabat, S.L.; Anumandla, K.K.; Kandyala, P.K.; Nayak, J. Design and implementation of realtime co-processor for denoising fiber optic gyroscope signal. Digit. Signal Process. 2013, 23, 1813–1825. [Google Scholar]
- Kownacki, C. Optimization approach to adapt Kalman Filters for the real-time application of accelerometer and gyroscope signal’ filtering. Digit. Signal Process. 2011, 21, 131–140. [Google Scholar] [CrossRef]
- Gao, W.W.; Wang, G.L.; Zhang, C.X.; Chen, J.H.; Gao, F.Q. An AMA-DWT-DMKF method for fiber optic gyroscope signal filtering. Chin. J. Lasers 2014, 41, 1–7. [Google Scholar] [CrossRef]
- Narasimhappa, M.; Sabat, S.L.; Nayak, J. An improved adaptive unscented Kalman Filter for denoising the FOG signal. In Proceedings of the 2014 Annual IEEE India Conference (INDICON), Pune, India, 11–13 December 2014; pp. 1–6.
- Narasimhappa, M.; Sabat, S.L.; Nayak, J. An improved adaptive square root unscented Kalman Filter for denoising IFOG signal. In Proceedings of the 2014 IEEE International Symposium on Intelligent Signal Processing and Communication Systems (ISPACS), Kuching, Malaysia, 1–4 December 2014; pp. 159–164.
- Narasimhappa, M.; Sabat, S.L.; Nayak, J. Adaptive sampling strong tracking scaled unscented kalman filter for denoising the fiber optic gyroscope drift signal. IET Sci. Meas. Technol. 2015, 9, 241–249. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, G.; Liu, Y.; Li, M.; Song, S. AMA- and RWE- Based Adaptive Kalman Filter for Denoising Fiber Optic Gyroscope Drift Signal. Sensors 2015, 15, 26940-26960. https://doi.org/10.3390/s151026940
Yang G, Liu Y, Li M, Song S. AMA- and RWE- Based Adaptive Kalman Filter for Denoising Fiber Optic Gyroscope Drift Signal. Sensors. 2015; 15(10):26940-26960. https://doi.org/10.3390/s151026940
Chicago/Turabian StyleYang, Gongliu, Yuanyuan Liu, Ming Li, and Shunguang Song. 2015. "AMA- and RWE- Based Adaptive Kalman Filter for Denoising Fiber Optic Gyroscope Drift Signal" Sensors 15, no. 10: 26940-26960. https://doi.org/10.3390/s151026940
APA StyleYang, G., Liu, Y., Li, M., & Song, S. (2015). AMA- and RWE- Based Adaptive Kalman Filter for Denoising Fiber Optic Gyroscope Drift Signal. Sensors, 15(10), 26940-26960. https://doi.org/10.3390/s151026940