
Auto Regressive Moving Average (ARMA) Modeling Method for Gyro Random Noise Using a Robust Kalman Filter

Abstract
:1. Introduction
2. ARMA Modeling Method Using a Robust Kalman Filtering
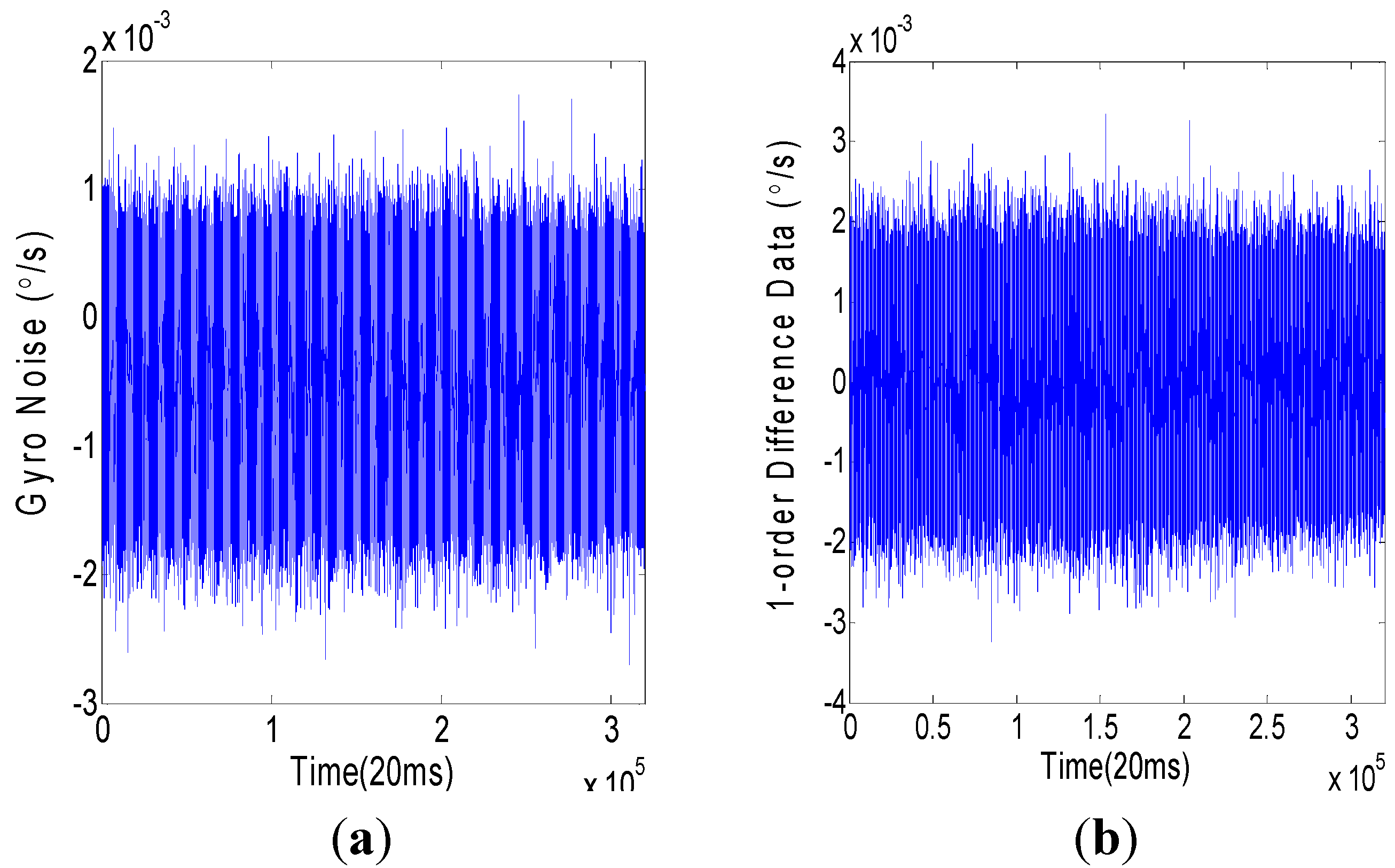
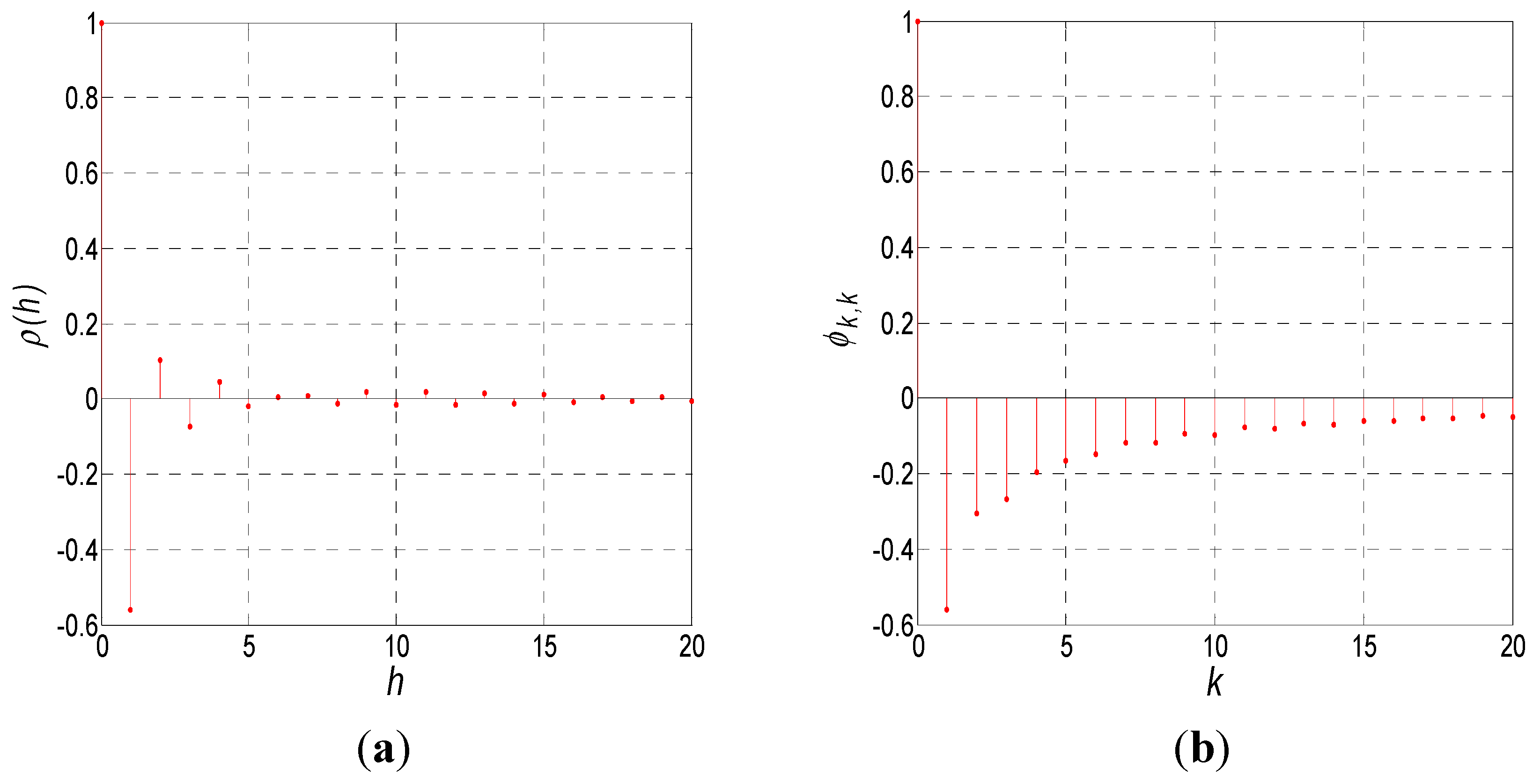
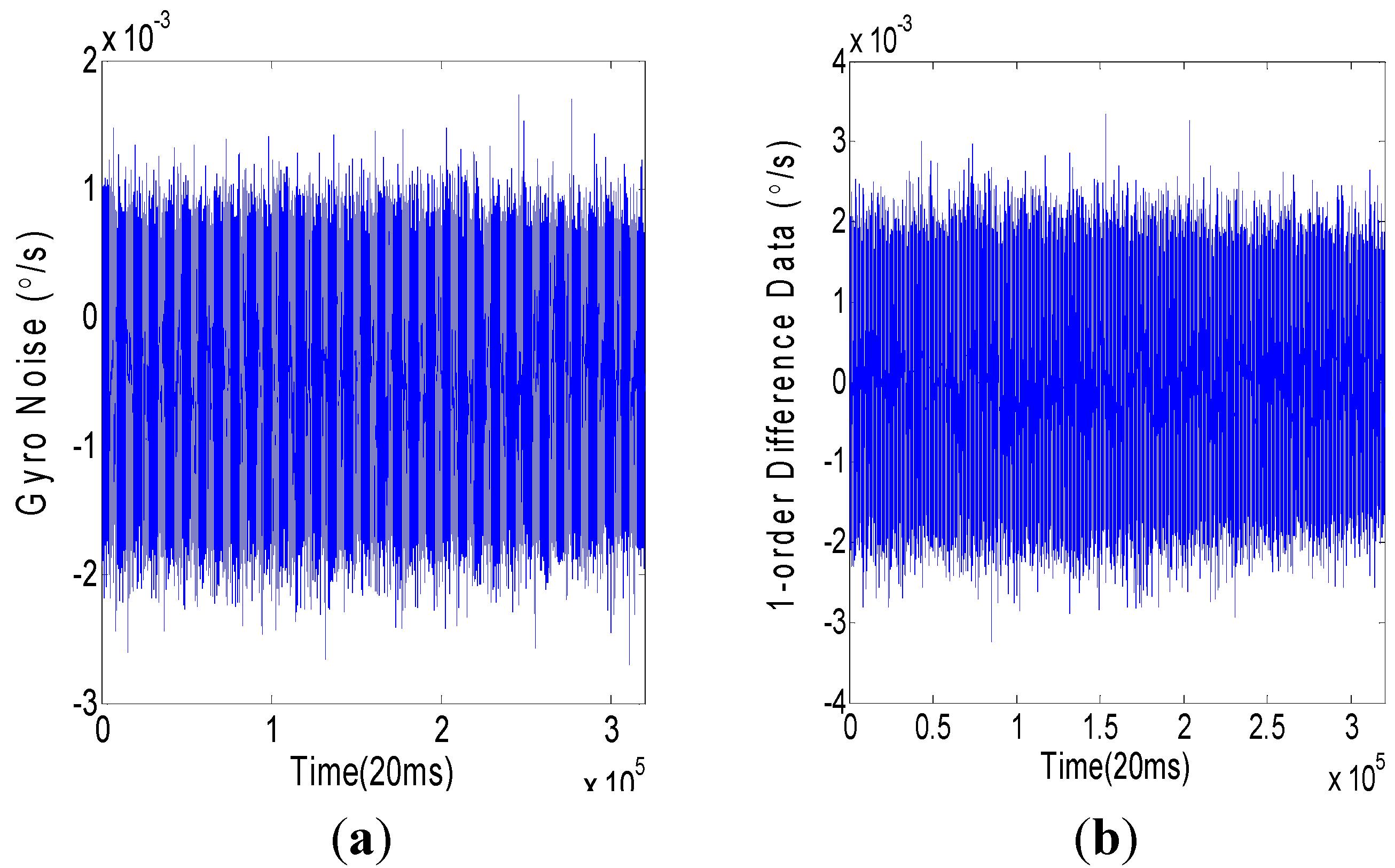
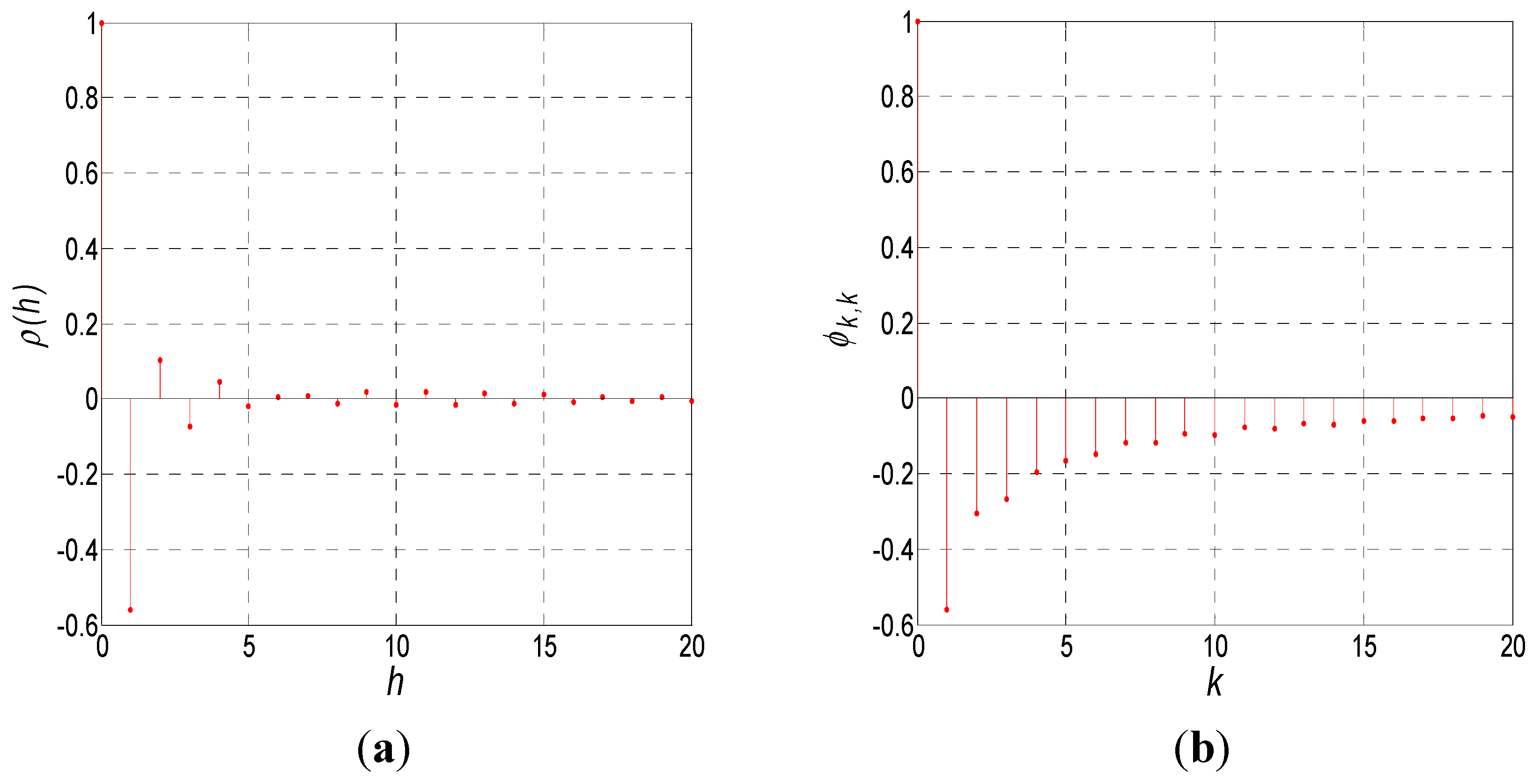
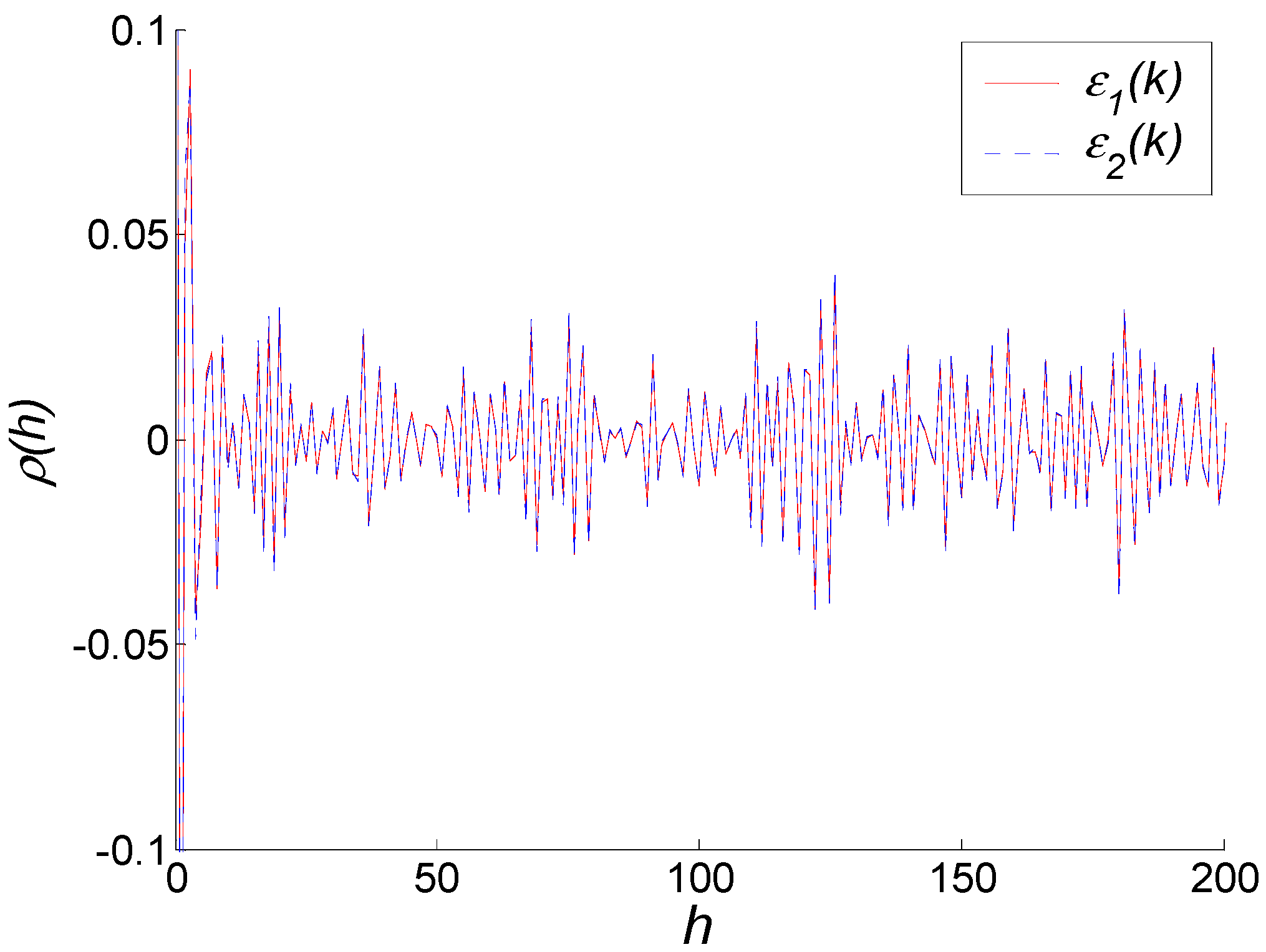
2.1. Randomness and Stationarity Test and Analysis of the Auto-Correlation and Partial Correlation Characteristics

2.2. ARMA Modeling Method Using a Robust Kalman Filter
2.2.1. State Equation and Measurement Equation
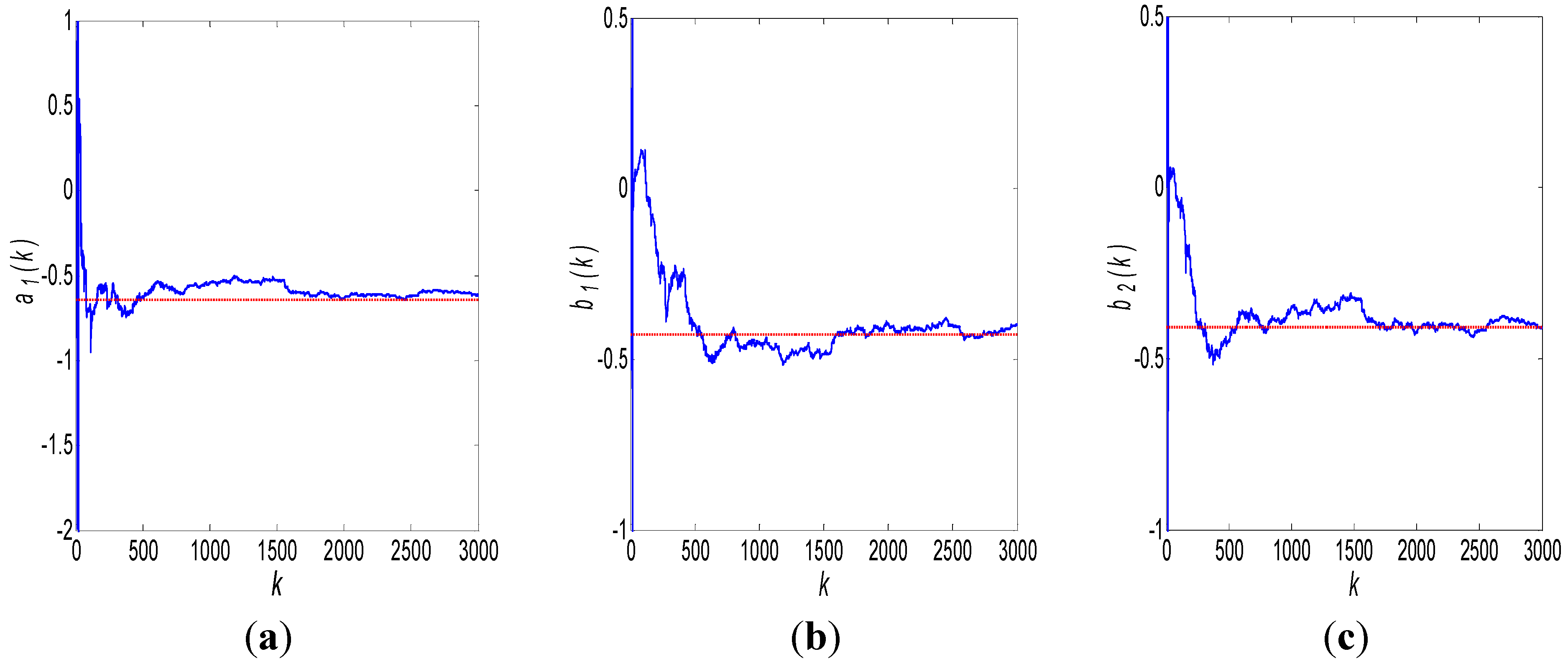
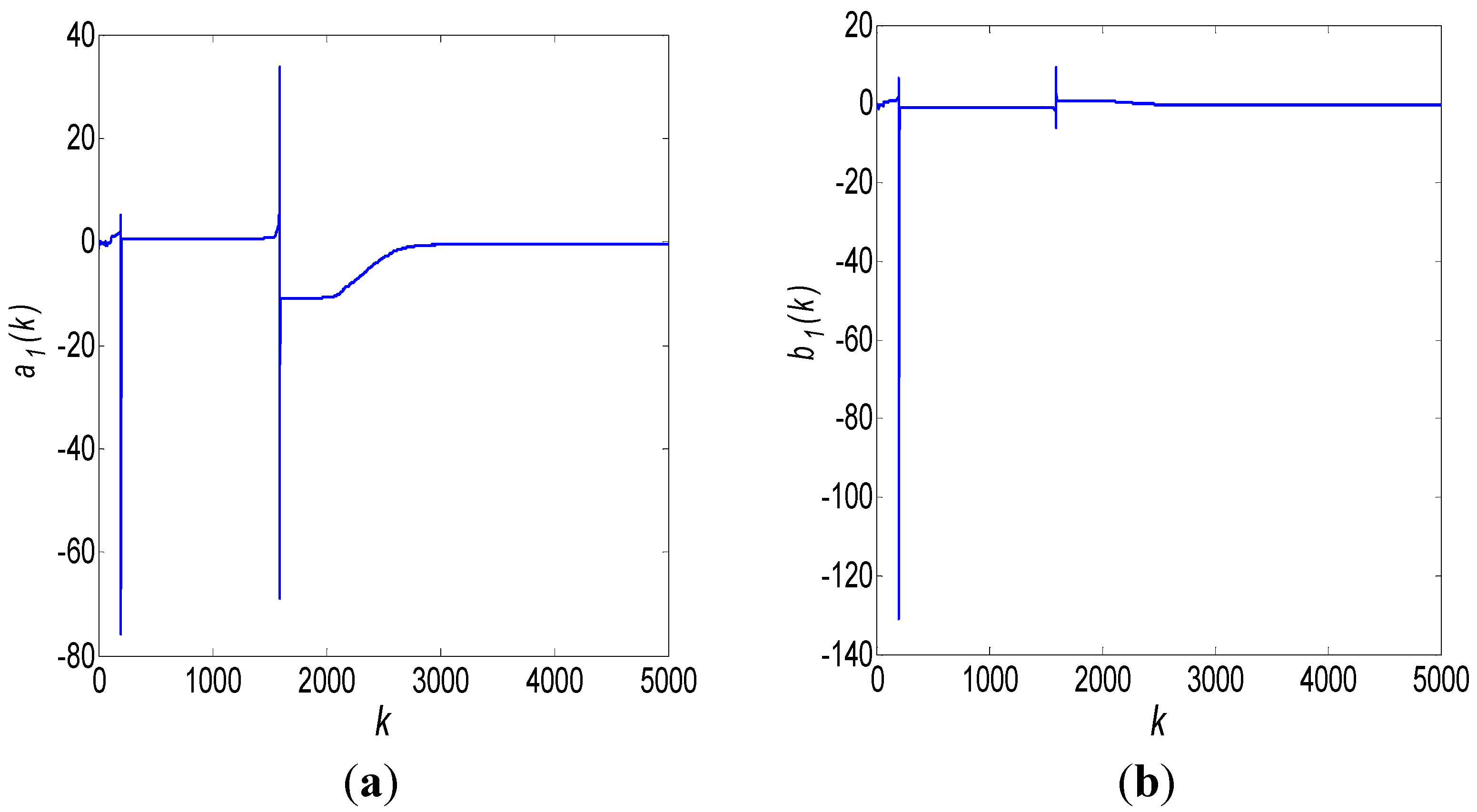
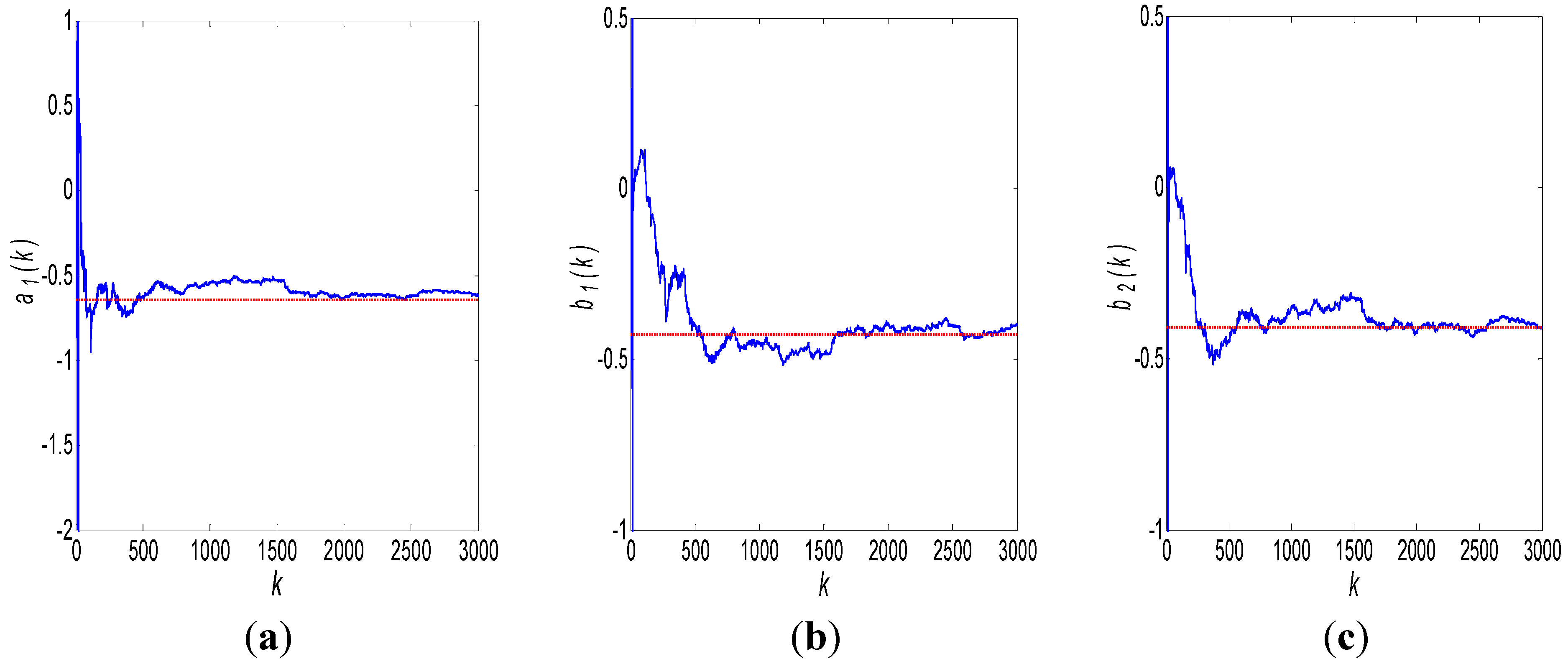
2.2.2. Parameter Estimation Using a Robust Kalman Filter


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
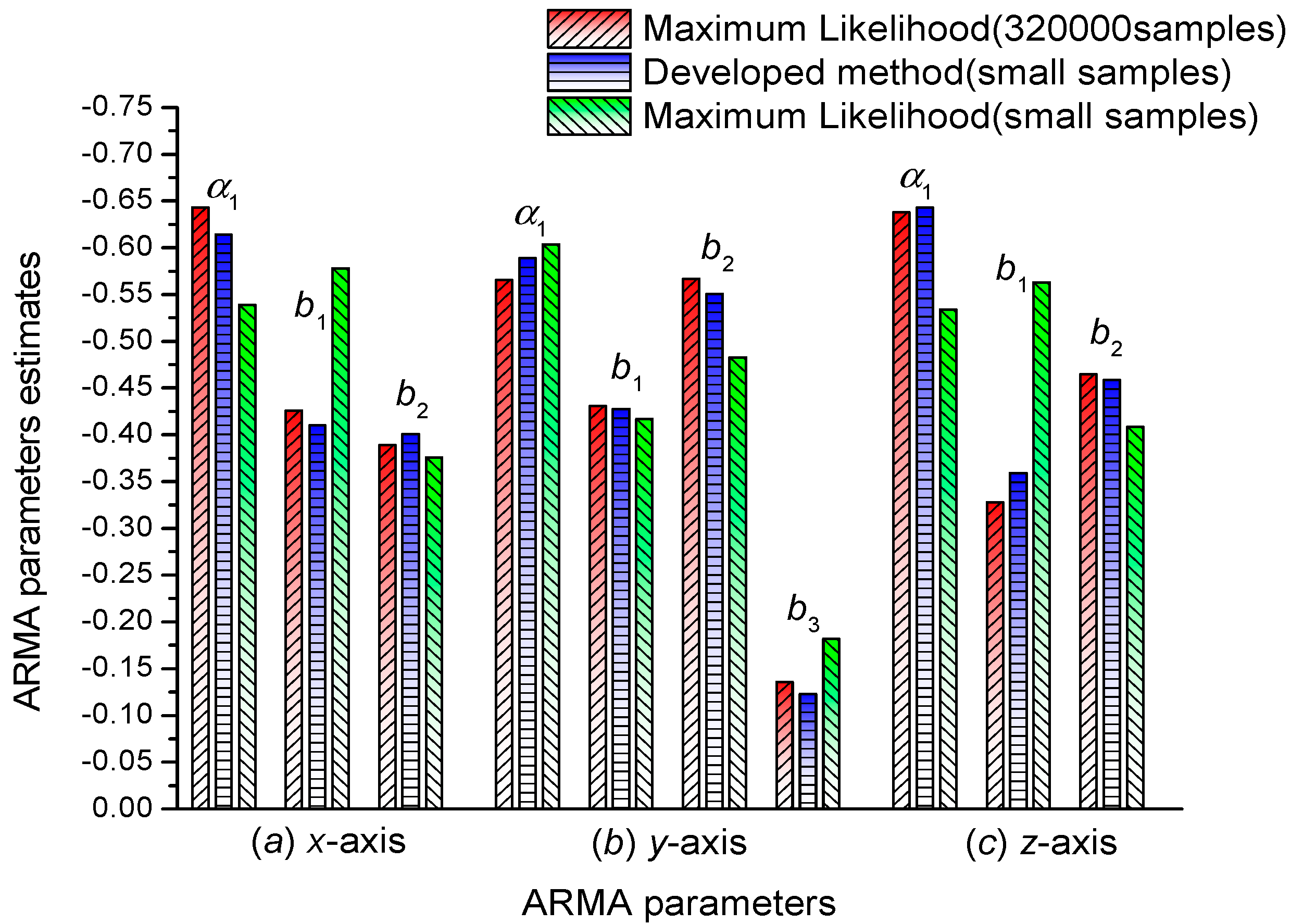
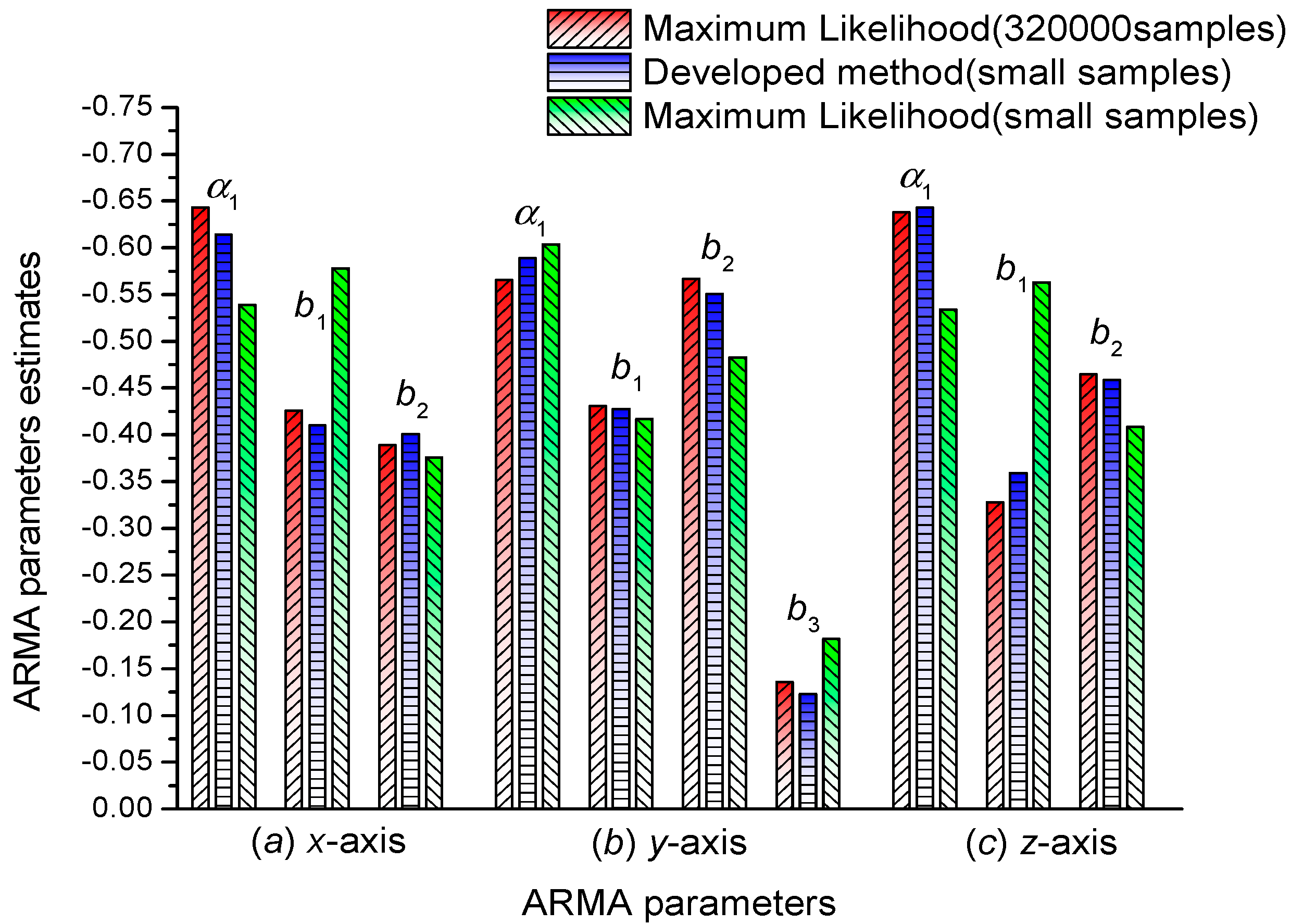
| Axis | Modeling Method | Sample Size | a1 | b1 | b2 |
|---|---|---|---|---|---|
| X | Maximum Likelihood | 320,000 | −0.643 | −0.426 | −0.389 |
| Developed Method | 2230 | −0.614 | −0.410 | −0.401 | |
| Maximum Likelihood | 2230 | −0.539 | −0.578 | −0.376 |
| Axis | Modeling Method | Sample Size | a1 | b1 | b2 | b3 |
|---|---|---|---|---|---|---|
| Y | Maximum Likelihood | 320,000 | −0.566 | −0.431 | −0.567 | −0.136 |
| Developed Method | 1367 | −0.589 | −0.428 | −0.551 | −0.123 | |
| Maximum Likelihood | 1367 | −0.604 | −0.417 | −0.483 | −0.182 | |
| Z | Maximum Likelihood | 320,000 | −0.638 | −0.328 | −0.465 | - |
| Developed Method | 2073 | −0.643 | −0.359 | −0.459 | - | |
| Maximum Likelihood | 2073 | −0.534 | −0.563 | −0.409 | - |
3. Conclusions
Acknowledgments
Conflicts of Interest
References
- Seonge, S.M.; Lee, J.G. Equivalent ARMA model representation for RLG random errors. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 286–290. [Google Scholar] [CrossRef]
- Liu, J.F.; Jiang, Y.; Ding, C.H. Random signal processing for fiber optic gyro based on Kalman filter. J. Astronaut. 2009, 30, 604–608. [Google Scholar]
- Li, J.; Zhang, W.D.; Liu, J. Research on the Application of the Time-Serial Analysis Based Kalman Filter in MEMS Gyroscope Random Drift Compensation. Chin. J. Sens. Actuators 2006, 19, 2215–2219. [Google Scholar]
- Richard, J.V.; Ahmed, S.K. Statistical modeling of rate gyros. IEEE Trans. Instrum. Meas. 2012, 61, 673–684. [Google Scholar]
- Lam, Q.M.; Stamatakos, N.; Woodruff, C. Gyro modeling and estimation of its random noise sources. In Proceedings of the AIAA Guidance Navigation and Control Conference, Austin, TX, USA, 11–14 August 2003.
- Li, J.L.; Xu, H.L.; He, J. Real-time filtering methods of random drift of fiber optic gyroscope. J. Astronaut. 2010, 31, 2717–2721. [Google Scholar]
- Yuan, G.N.; Liang, H.B.; He, K.P.; Xie, Y.J. On-line compensation technique for micromechanical gyroscope random error. J. Beijing Univ. Aeronaut. Astronaut 2010, 36, 1448–1452. [Google Scholar]
- Broersen, P.M.T; Waele, S.D. Automatic identification of time series models from long autoregressive models. IEEE Trans. Instrum. Meas. 2005, 54, 1862–1868. [Google Scholar] [CrossRef]
- Nassar, S.; Schwarz, K.P.; El-Sheimy, N. Modeling Inertial Sensor Errors Using Autoregressive (AR) Models. J. Inst. Navig. 2004, 51, 259–268. [Google Scholar] [CrossRef]
- Liu, Y.H.; Yang, H.C. Identification and simulation of low-precision FOG random noise. Sci. Surv. Mapp. 2012, 37, 29–31. [Google Scholar]
- Deng, Z.L. Self-Tuning Filter Theory and Its Applications-Modern Time Series Analysis Method; Harbin Institute of Technology Press: Harbin, China, 2003. [Google Scholar]
- Song, W.T.; Chih, M. Optimal-Mse Dynamic Batch Means Estimators for Steady-State Simulations. Eur. J. Oper. Res. 2013, 229, 114–123. [Google Scholar] [CrossRef]
- Song, W.T. An efficient approach to implement dynamic batch means estimators in simulation output analysis. J. Chin. Inst. Ind. Eng. 2012, 29, 163–180. [Google Scholar]
- Song, W.T.; Chih, M. Extended Dynamic Partial-Overlapping Batch Means Estimators for Steady-State Simulations. Eur. J. Oper. Res. 2010, 203, 640–652. [Google Scholar] [CrossRef]
- Zheng, Z.M.; Liu, J.Y.; Lai, J.Z.; Qian, W.X.; Zhu, Y.H. Filtering technique on FOG random noise and its application. J. Data Acq. Proc. 2009, 24, 6751–6754. [Google Scholar]
- Han, S.L.; Wang, J.L. Quantization and colored noises error modeling for inertial sensors for GPS/INS integration. IEEE Sens. J. 2011, 11, 1493–1503. [Google Scholar] [CrossRef]
- Guo, L.; Wu, X.Z.; Jin, Y. Building model of the drift of the fiber optic gyroscope and application in the error equation of inertial navigation system. Opt. Technol. 2013, 39, 328–330. [Google Scholar]
- Hao, Y.L.; Wang, D.S.; Chen, H.G.; Zhang, Y.G. Suppression of relative intensity noise for FOG by using signal cross-correlation. Optics Precis. Eng. 2012, 20, 1218–1224. [Google Scholar]
- Georgy, J.A.; Noureldin, M.J.; Korenberg, M.J.; Bayoumi, M.M. Modeling the stochastic drift of a MEMS-based gyroscope in gyro/odometer/GPS integrated navigation. IEEE Intel. Trans. Syst. 2010, 11, 856–872. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, L. Auto Regressive Moving Average (ARMA) Modeling Method for Gyro Random Noise Using a Robust Kalman Filter. Sensors 2015, 15, 25277-25286. https://doi.org/10.3390/s151025277
Huang L. Auto Regressive Moving Average (ARMA) Modeling Method for Gyro Random Noise Using a Robust Kalman Filter. Sensors. 2015; 15(10):25277-25286. https://doi.org/10.3390/s151025277
Chicago/Turabian StyleHuang, Lei. 2015. "Auto Regressive Moving Average (ARMA) Modeling Method for Gyro Random Noise Using a Robust Kalman Filter" Sensors 15, no. 10: 25277-25286. https://doi.org/10.3390/s151025277
APA StyleHuang, L. (2015). Auto Regressive Moving Average (ARMA) Modeling Method for Gyro Random Noise Using a Robust Kalman Filter. Sensors, 15(10), 25277-25286. https://doi.org/10.3390/s151025277