
Development of a Hybrid Artificial Neural Network-Particle Swarm Optimization Model for the Modelling of Traffic Flow of Vehicles at Signalized Road Intersections



Abstract
:1. Introduction
- Can a hybrid artificial intelligence algorithm such as an artificial neural network trained by particle swarm optimization (ANN-PSO) be used as a predictive approach in modeling traffic flow at a signalized road intersection?
- Can traffic flow parameters such as speed of vehicles, traffic density, time, number of different classes of vehicles on the road, and traffic volume be used to model vehicular traffic flow at a road intersection?
2. Literature Review
Related Studies
- Multi-objective optimization by implementing PSO.
- Modified Particle swarm optimization.
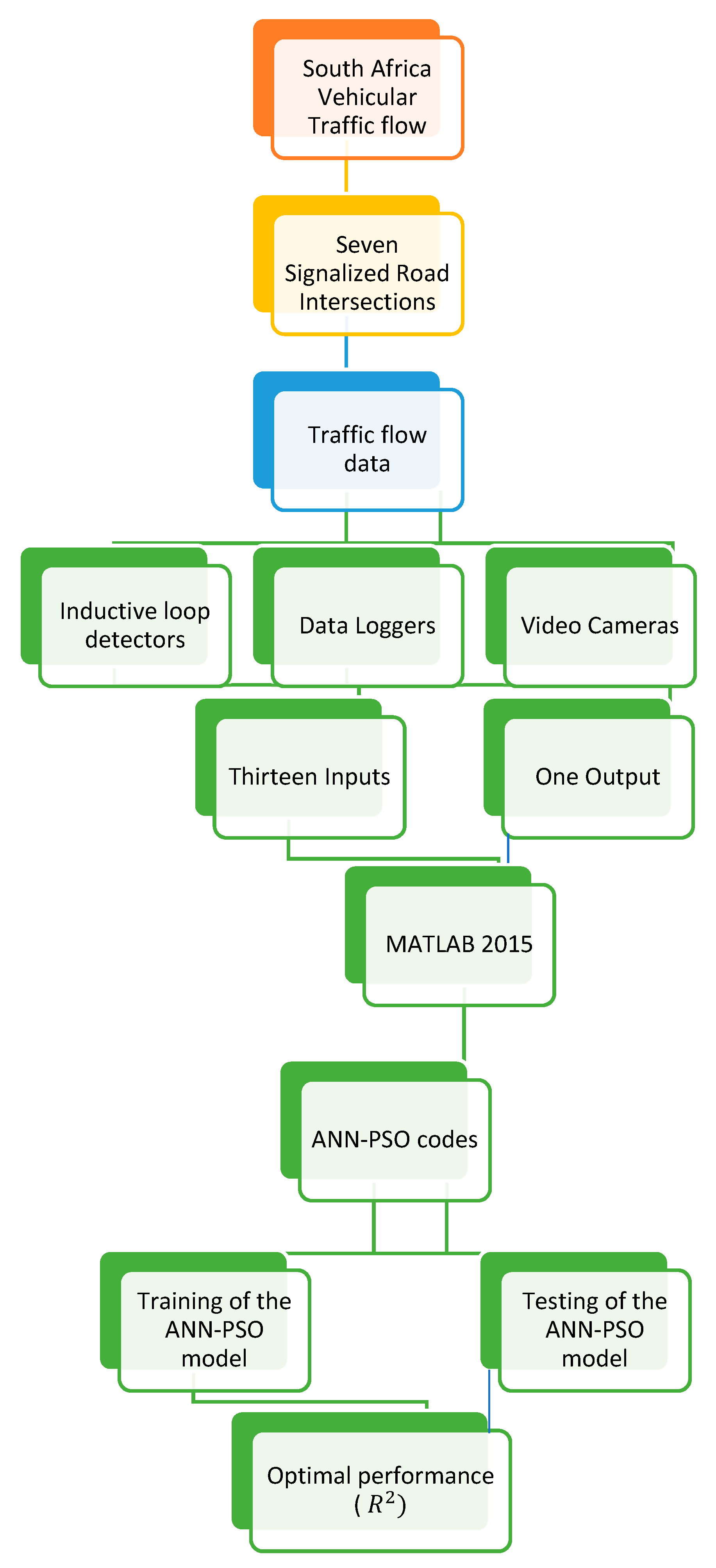
3. Methodology
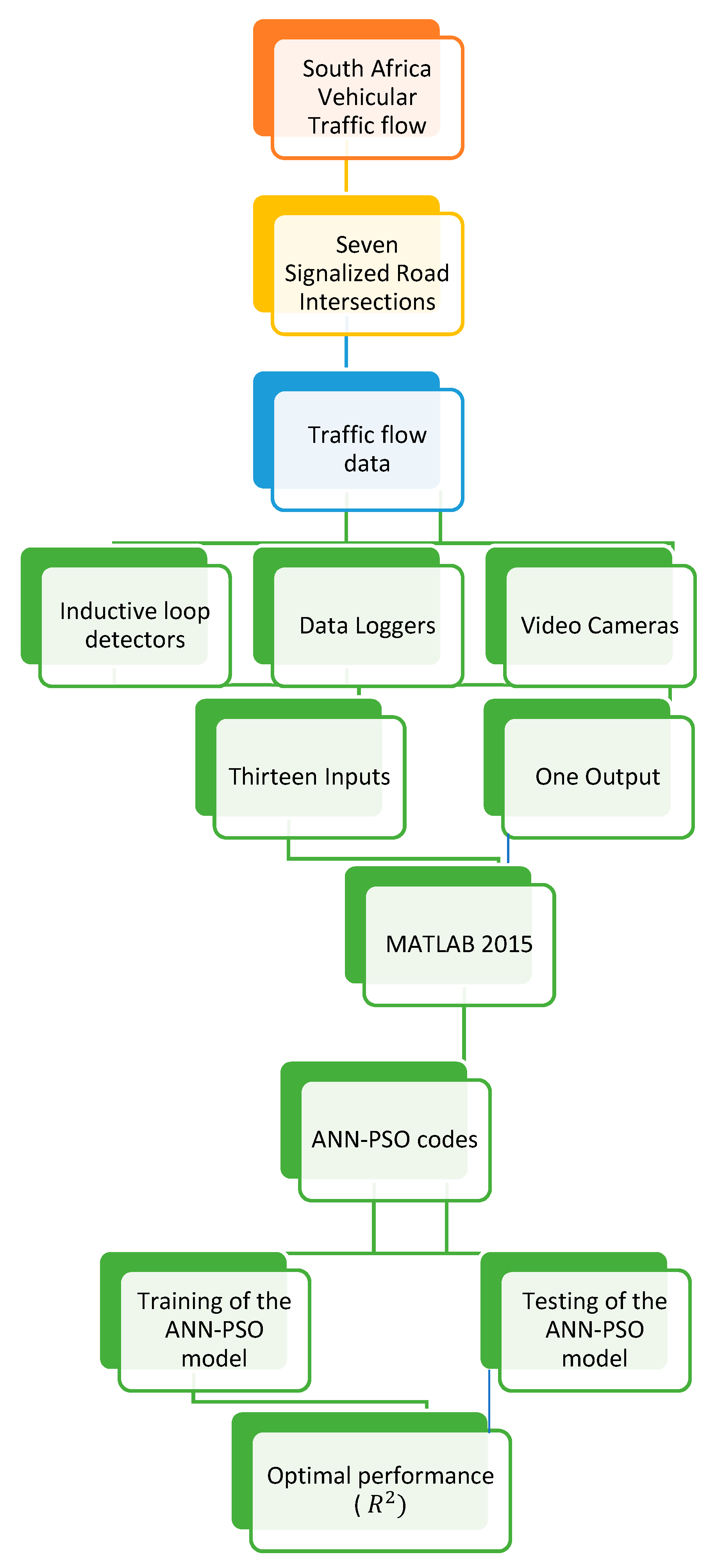
3.1. Research Design
3.2. Traffic Data
3.3. Data Collection
3.4. Sample and Sampling Techniques
3.5. Population of the Study
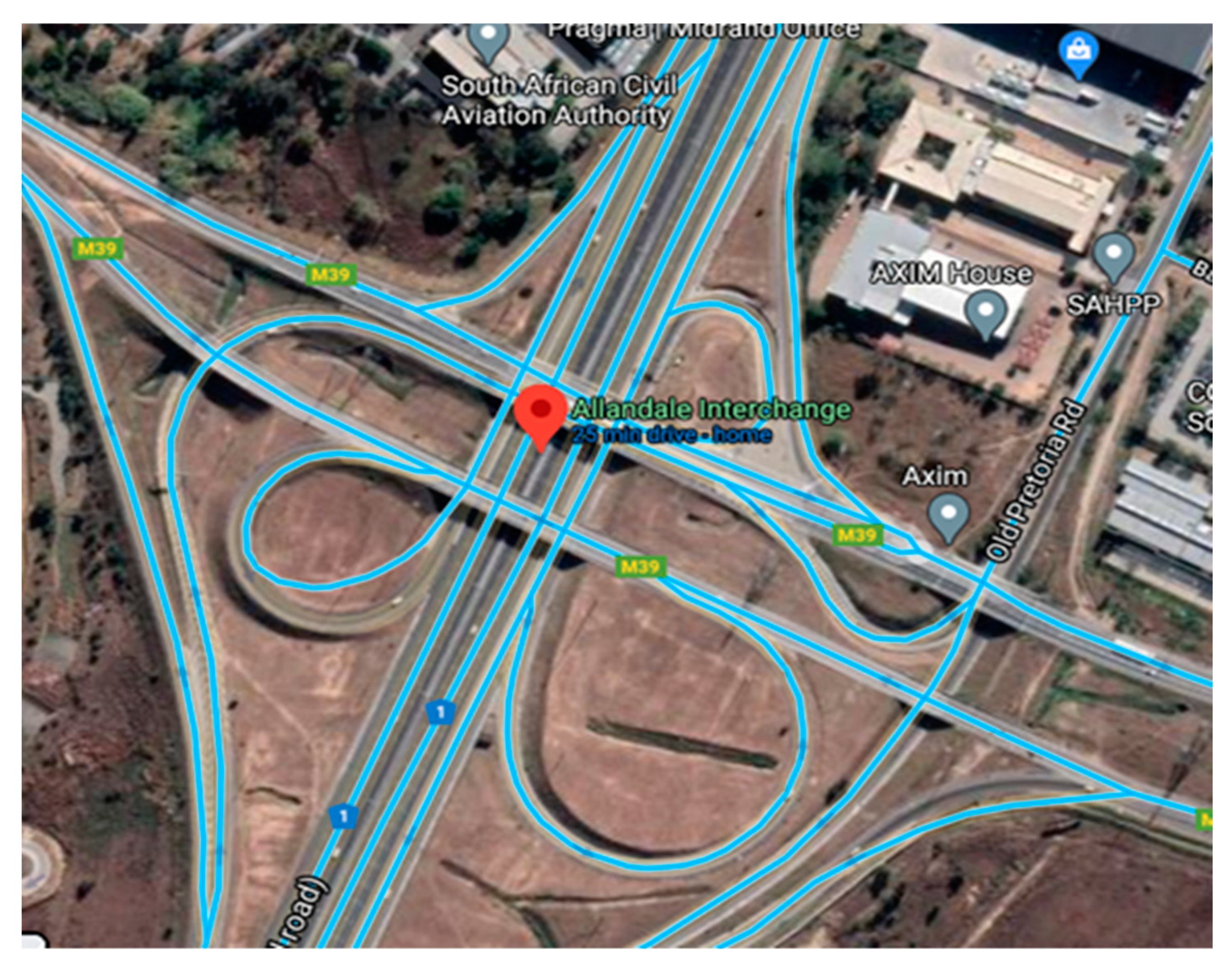
3.6. Location of the Research Study
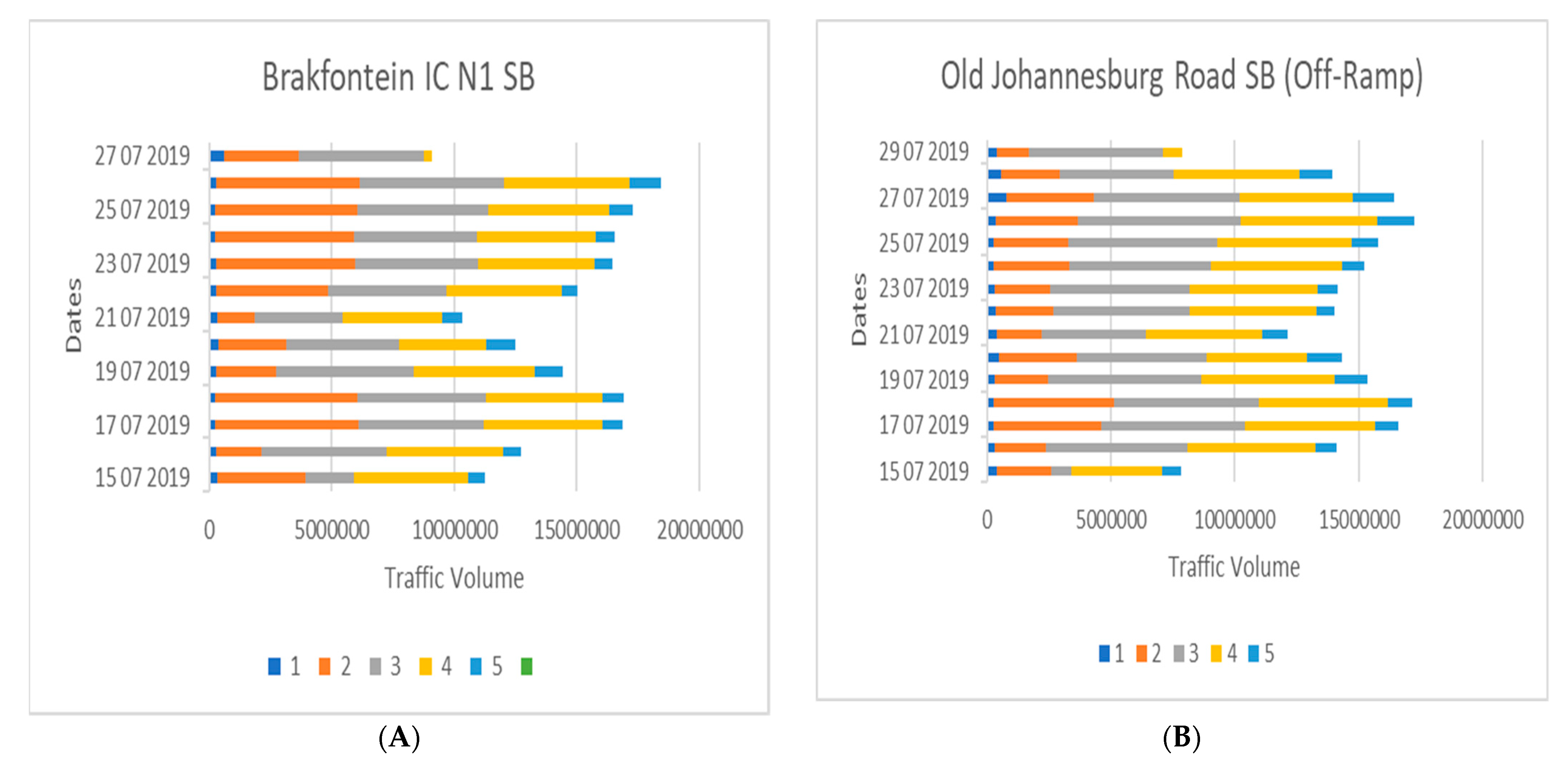
- Brakfontein 1C N1 SB (Roadsite 1852).
- Old Johannesburg Road SB off-ramp (Roadsite 1854).
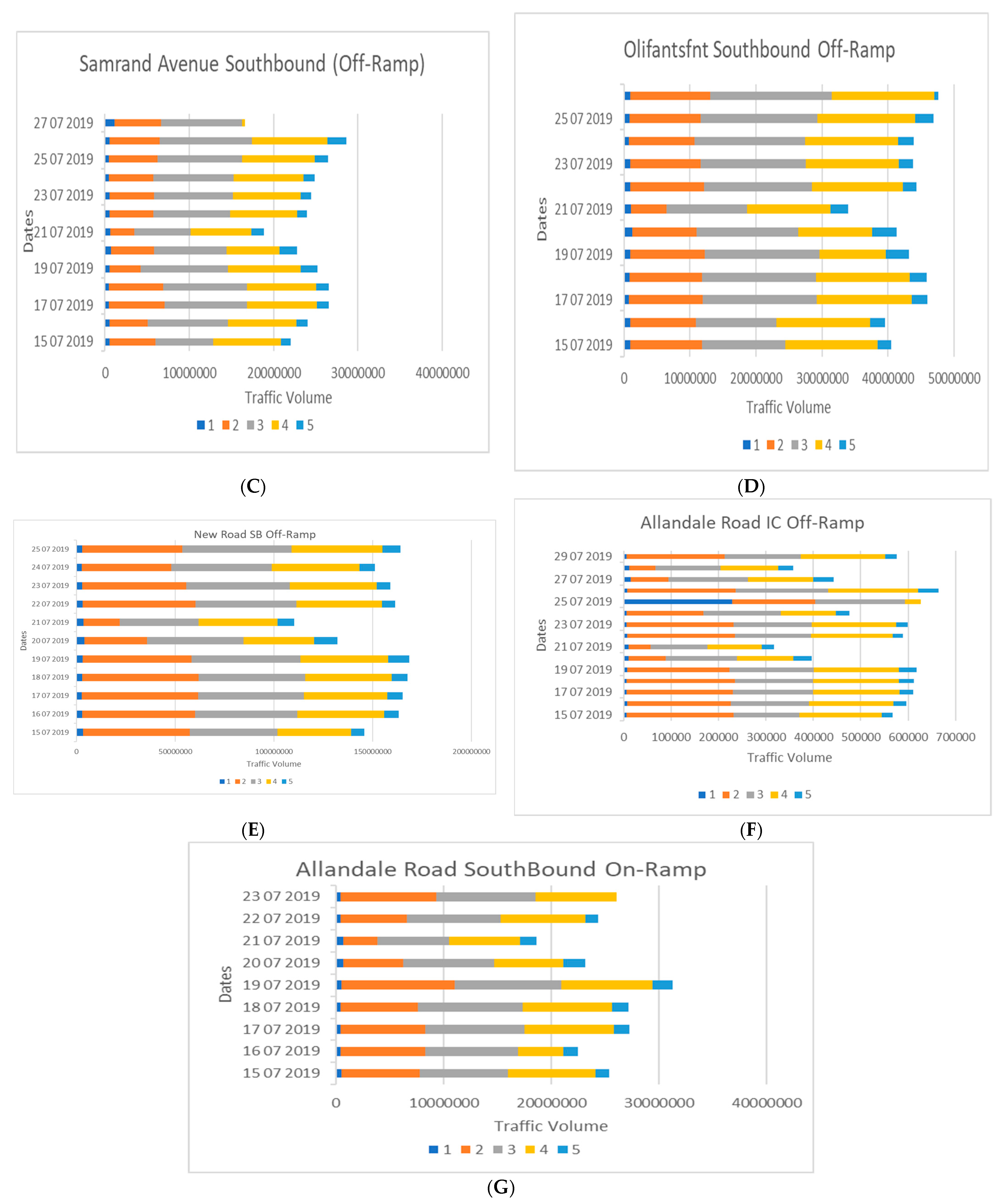
- Samrand Avenue SB off-ramp (Roadsite 1856).
- Olifantsfnt SB off-ramp (Roadsite 1858).
- New road SB off-ramp (Roadsite 1860).
- Allandale road SB IC off-ramp (Roadsite 1862).
- Allandale road SB on-ramp (Roadsite 1863).
- Off-ramp: When a vehicle drives off the freeway to connect with another road, usually a minor road.
- On-ramp: This is when vehicles connect from the minor road to the freeway
3.7. Size and Extraction of the Traffic Datasets
- Traffic density: This is the number of vehicles per unit length. It is calculated as:
- Traffic volume: This is the number of vehicles depending on a specific period.
- The number of short/medium/long trucks: This is the overall total number of different types of trucks on a specific road depending on the time of the day and traffic volume.
- The number of light vehicles: This is the overall total number of different types of light vehicles on a specific road network considering the period of the day and traffic volume.
- Time of day of light vehicles or short/medium/long trucks: This parameter is dependent on the speed of the vehicles or truck and the distance of the specific road site. For example, the road sites used as a case study in this research study have their distance. Its mathematical expression is;
- The average speed of light vehicles or short/medium/long trucks: This is the speed of the vehicles on the road at a specific period. Each road has its speed limit. The road sites used for this study all have a speed limit of 120 km/h.
3.8. Method of Data Collection
3.8.1. Data Loggers
3.8.2. Loop Detectors
3.8.3. Video Cameras
3.9. South Africa Vehicular Traffic Flow
- 1:
- 00:00:00–04:59:59 (Off-peak)
- 2:
- 05:00:00–09:59:59 (On-peak)
- 3:
- 10:00:00–14:59:59 (On-peak)
- 4:
- 15:00:00–19:59:59 (On-peak)
- 5:
- 20:00:00–23:59:59 (Off-peak)
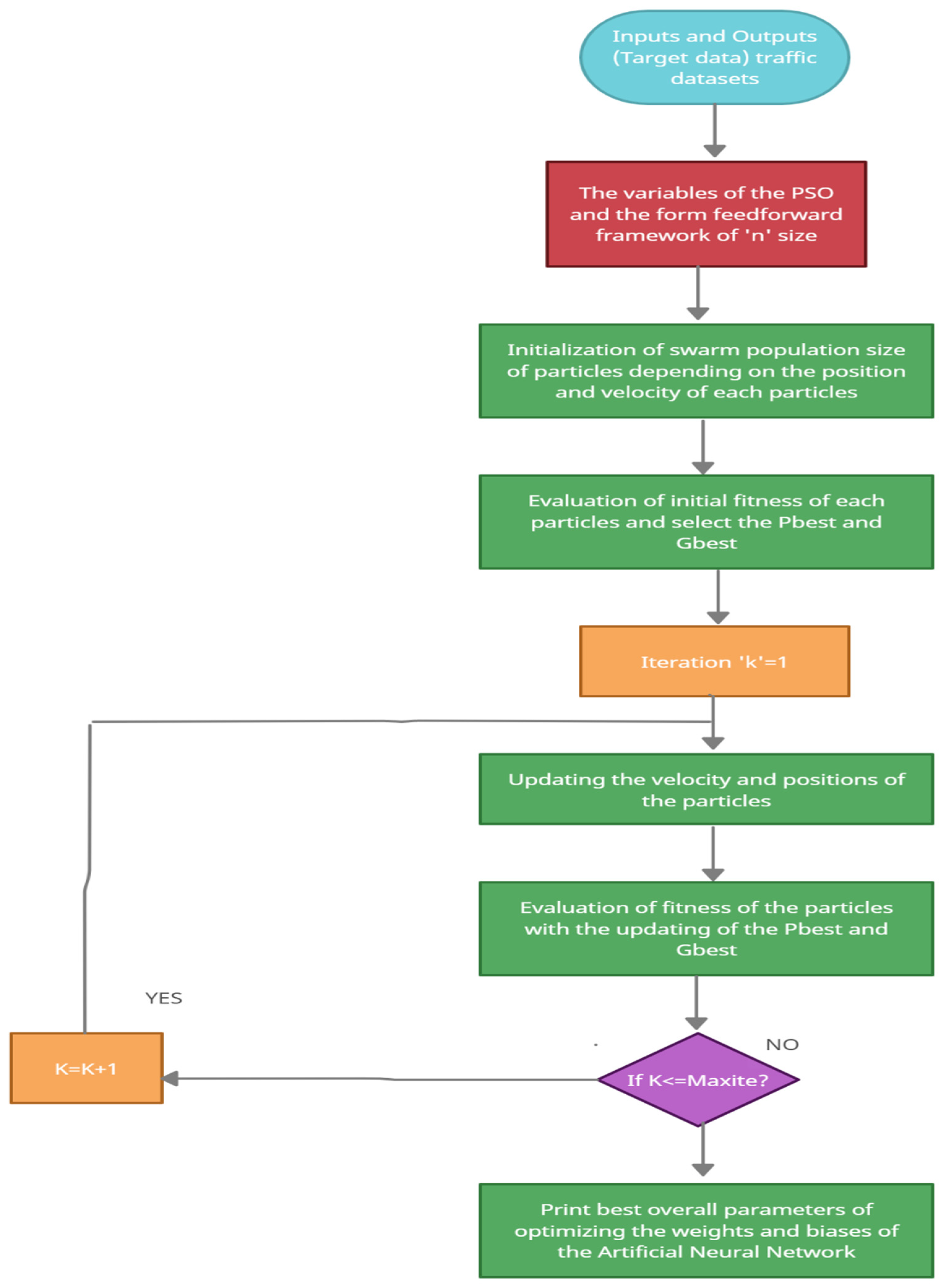
3.10. The Goal, Data Inputs, and Data Processing Involved in the Development of the ANN-PSO Model
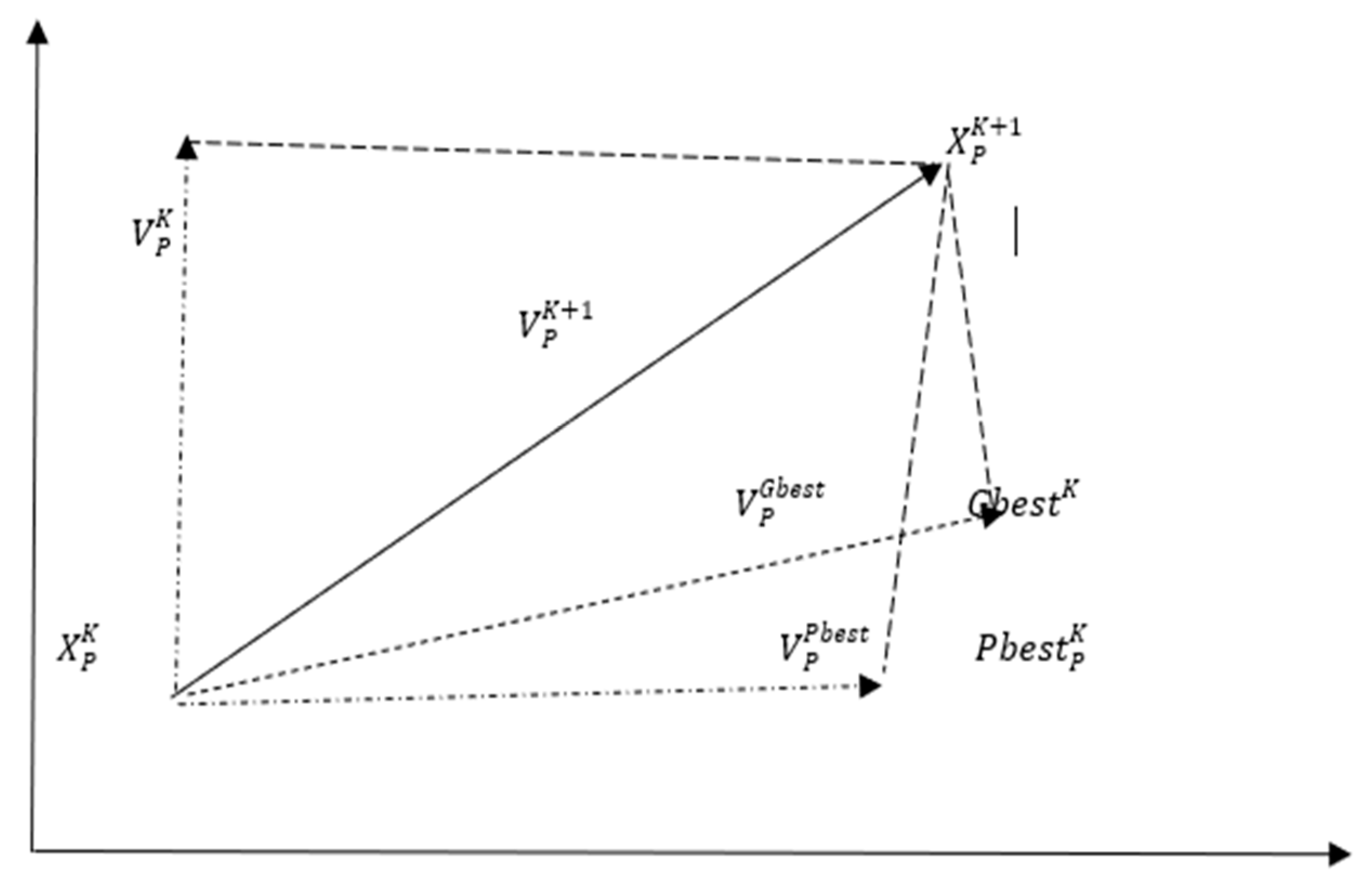
- Initializing a population of individuals (particles) with random velocities and positions in the domain of the problem.
- Computing the fitness value for all particles.
- Investigating fitness of particles.
- Updating the velocity and position of particles using Equations (4) and (5).
- r1 and r2 are called random numbers.
- c1 and c2 are the acceleration constants.
- w, χ, Pt and Gt are all called the weight of inertia, pbest, and gbest.
- A maximum iteration of 1000.
- The training run will be terminated if the objective function is not up to a specific fixed parameter.
- Step One: Traffic data collection.
- Step Two: Creation of the hybrid network.
- Step Three: Configuration of the ANN-PSO network.
- Step Four: Initialization of the weight and biases.
- Step Five: Training the Neural network by applying particle swarm optimization.
- Step Six: Validation and testing of the ANN-PSO network.
- Step Seven: Using the Neural Network.
- [x,t] = traffic_dataset;
- Inputs =X′;
- Outputs = t′;
4. Results and Discussions
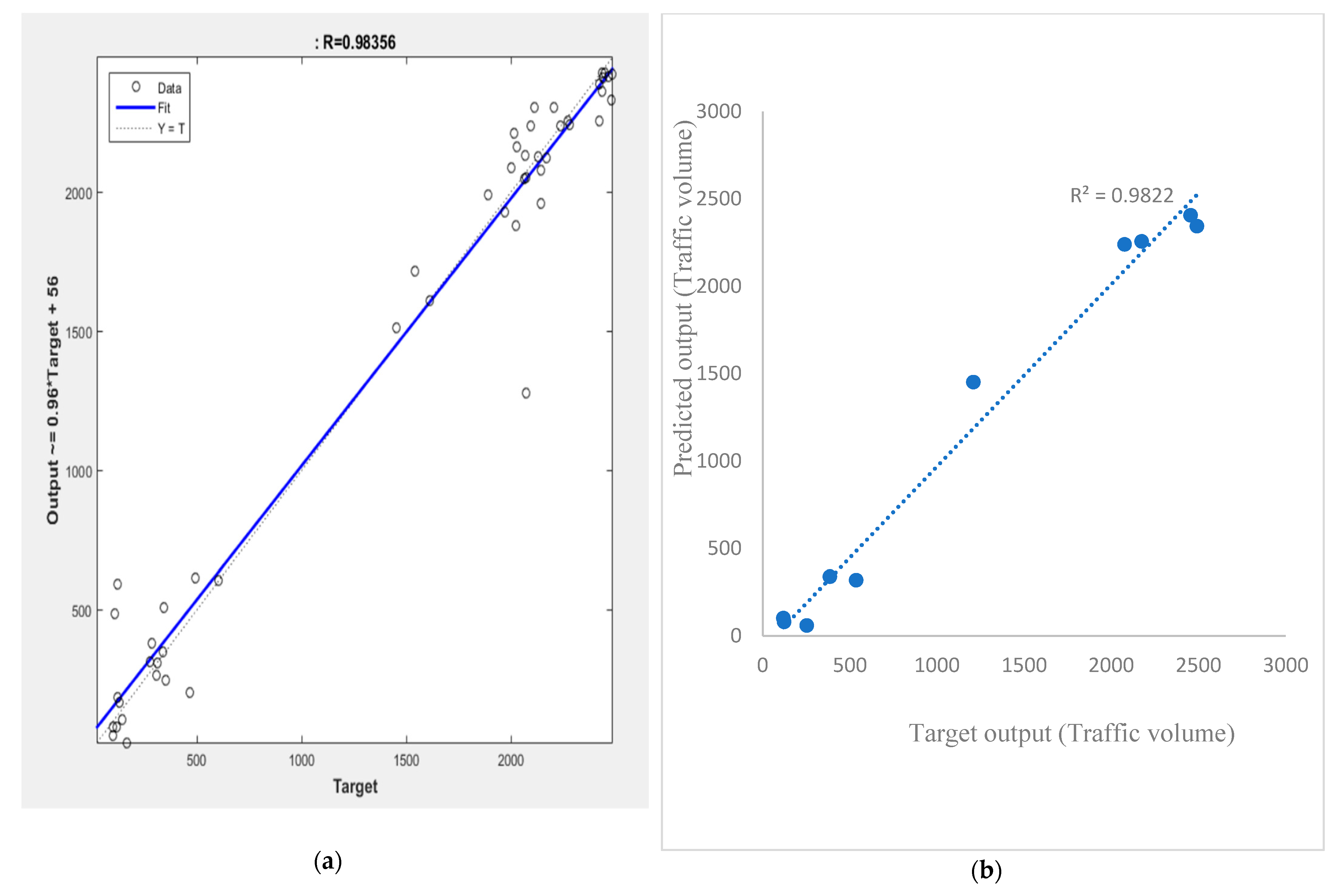
The ANN-PSO Model Results and Discussions
- (a)
- Number of hidden neurons = 5
- (b)
- Swarm population size = 400
- (c)
- Number of traffic datasets = 434
- (d)
- C1 and C2 = 1.5 and 2
- (e)
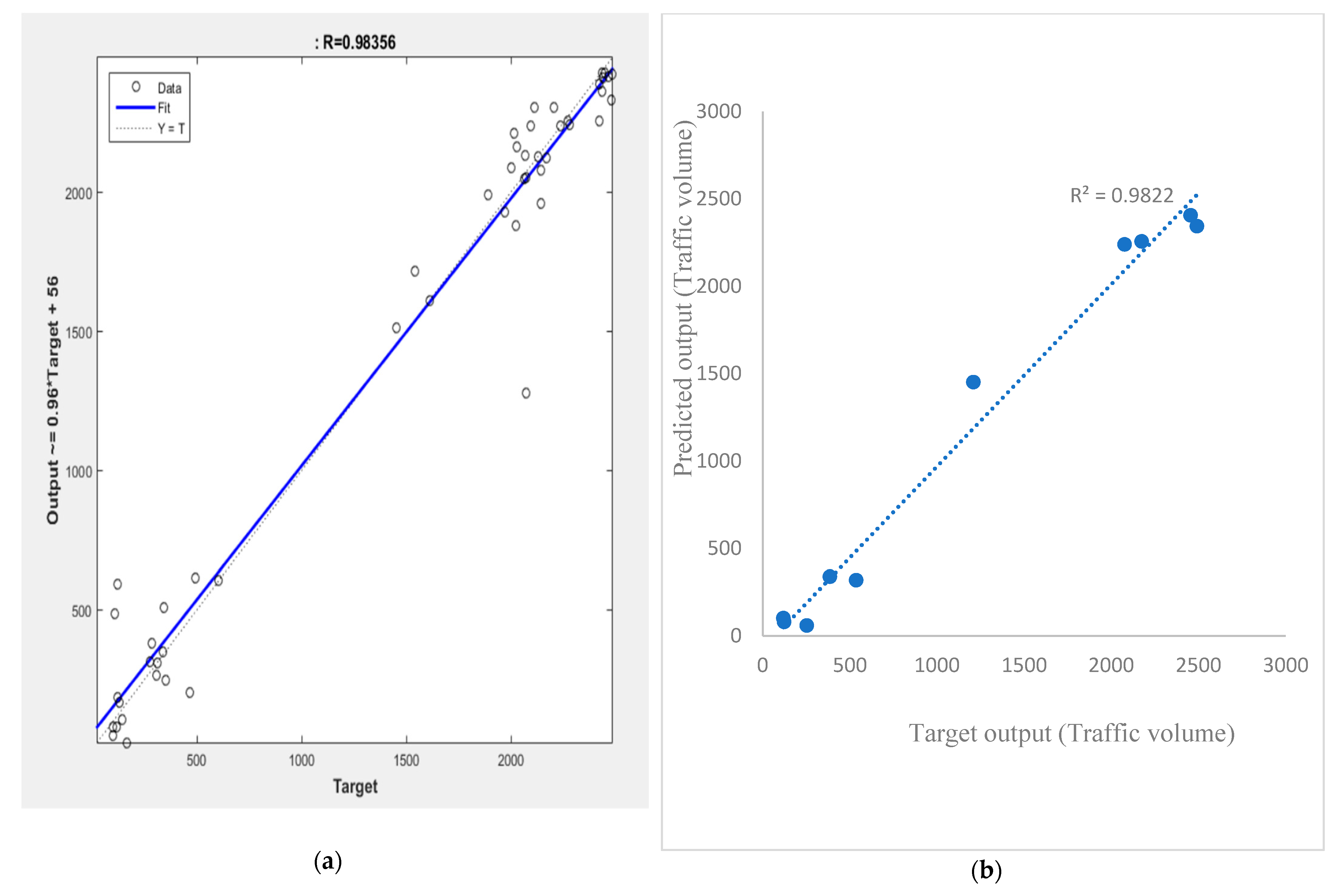
- Training (R2) = 0.98356
- (f)
- Testing (R2) = 0.98220
5. Conclusions and Future Work
- ANN-PSO model is potentially suitable for the prediction and analysis of traffic flow at a signalized road intersection. This model could be used to predict traffic flow with a high level of accuracy. It explains the heterogeneous traffic flow conditions at different periods of the day.
- Due to the stochastic nature of traffic information, it is difficult to determine the volume of traffic flow at a signalized road intersection. This equally implies that the specific time of the day determines the traffic density and vehicular speed on the road. The evidence from this study suggests that traffic density and traffic volume are significant in determining traffic congestion and understanding the traffic flow patterns on a road transportation network.
- The ANN-PSO model developed in this study will assist transportation engineers and urban planners in developing possible ways to use their respective country’s traffic information to understudy traffic flow patterns and variables for effective predictive models. Also, designing a traffic control system for traffic lights at road intersections can be made possible and timely.
- The results of this study will serve as a base for future studies for engineers and transportation researchers in understanding the complexity of traffic flow patterns at a signalized road intersection. Also, it will assist drivers in the decision-making process, such as which period of the day traffic congestion is likely to occur on a particular road.
- Further work needs to be done to establish whether other metaheuristic algorithms, such as the second generation of particle swarm optimization (SGPSO), bee colony, an artificial neural network trained by genetic algorithm (ANN-GA), adaptive neuro-fuzzy inference system trained by particle swarm optimization (ANFIS-PSO) and simulated annealing can be used in developing predictive models using traffic flow parameters obtained from a signalized road intersection.
- A natural progression of this research study would be to focus on unsignalized road intersections, traffic light timing response optimization, and the usability of traffic volume in determining traffic congestions at road intersections. Besides, demonstrating other metaheuristic techniques’ strength and predictive power will be very useful as a comparative measure for minimizing traffic issues in road transportation.
- Finally, another possible area of future research would be to investigate if the optimal solution obtained in this research depends on factors affecting traffic flow and how could the optimal solution change depending on these factors.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
- Two axles, six tyre unit + light trailer (max 4 axle): These include vehicles used to carry sand and construction materials, including camping and recreational vehicles. They have three axles.
- Three axle single unit (+1 axle trailer): These types of vehicles are called trucks, e.g., camping and recreational kinds of vehicles.
- Four or less axle large trailer(s): This type of vehicle consists of 2 units, one of which can either be a tractor or a straight truck power unit.
- Five axle single trailer: They comprise of 2 units and a tractor; multi-national industries usually use these types of trailers to move goods and services.
- Six or more axle single trucks: This type of vehicle always consists of 2 units, a tractor or a straight truck power unit.
- Five or fewer axle multi-trailer trucks: These include five or fewer axles comprising three or more units. It can either be a tractor or a straight truck power unit.
- Six axle multi-trailer trucks: This is either a tractor or a straight truck power unit.
- Seven or more axle multi-trailer trucks: This is also either a tractor or a truck power unit. It is usually used to carry heavy construction materials or used for transporting fuels.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name of the Roadsites | Dates | Number of Lanes | Lane Descriptions | Directions | Number of Vehicles at Each Roadsites | Longitude | Latitude | Speed Limit (km/hr) | Length of the Roadsites (m) |
|---|---|---|---|---|---|---|---|---|---|
| Brakfontein 1C N1 SB | 15–27 July 2019 | 7 | 01 Fastlane to Johannesburg | Southbound | 2,097,152 | 28.16857° E | −25.88084° S | 120 | 12.5 |
| 02 Middle to Johannesburg | Southbound | ||||||||
| 03 Slow Lane to Johannesburg | Southbound | ||||||||
| 04 On-Ramp joining N3 | Southbound | ||||||||
| 05 Fastlane from N1 | Southbound | ||||||||
| 06 Middle Lane from N1 (Polokwane) | Southbound | ||||||||
| 07 Slow Lane from N1 (Polokwane) | Southbound | ||||||||
| Old Johannesburg Road SB Off-Ramp | 15–29 July 2019 | 5 | 01 Fastlane to Johannesburg | Southbound | 16,240,260 | 28.158402° E | 25.90833° S | 120 | 9.4 |
| 02 Middle to Johannesburg | Southbound | ||||||||
| 03 Middle to Johannesburg | Southbound | ||||||||
| 04 Slow Lane to Johannesburg | Southbound | ||||||||
| 05 The Off-Ramp to R10 1N | Southbound | ||||||||
| Samrand Avenue Southbound Off-Ramp | 15–29 July 2019 | 7 | 01 Fastlane to Johannesburg | Southbound | 18,448,023 | 28.146509° E | −25.9271° S | 120 | 7 |
| 02 Middle to Johannesburg | Southbound | ||||||||
| 03 Middle to Johannesburg | Southbound | ||||||||
| 04 Slow Lane to Johannesburg | Southbound | ||||||||
| 05 Off-Ramp to Ultra city | Southbound | ||||||||
| 06 Fastlane, Off- Ramp | Southbound | ||||||||
| 07 Slow Lane, the Off-Ramp to Samrand Avenue | Southbound | ||||||||
| Olifantsfnt SB Off-Ramp | 15–29 July 2019 | 5 | 01 Fastlane to Johannesburg | Southbound | 19,051,124 | 28.134396° E | −25.95482° S | 120 | 3.7 |
| 02 Middle to Johannesburg | Southbound | ||||||||
| 03 Middle to Johannesburg | Southbound | ||||||||
| 04 Slow Lane to Johannesburg | Southbound | ||||||||
| 05 Off-Ramp to R56 2 | Southbound | ||||||||
| New Road Southbound (Off-Ramp) | 15–29 July 2019 | 5 | 01 Fastlane to Johannesburg | Southbound | 18,262,048 | 28.128098° E | 25.97556° S | 120 | 1.3 |
| 02 Middle to Johannesburg | Southbound | ||||||||
| 03 Middle to Johannesburg | Southbound | ||||||||
| 04 Slow Lane to Johannesburg | Southbound | ||||||||
| 05 Off-Ramp to New Road | Southbound | ||||||||
| Allandale Road Southbound IC (Southbound Only) | 15–29 July 2019 | 3 | 01 CD Road | Southbound | 5,815,648 | 28.116522° E | −26.01489° S | 120 | 54.5 |
| 02 Off-Ramp to Allandale Road | Southbound | ||||||||
| 03 On-Ramp from Allandale Road to N1 South | Southbound | ||||||||
| Allandale Road Southbound On-Ramp | 15–29 July 2019 | 8 | 01 Fastlane to Johannesburg | Southbound | 24,292,818 | 28.11375° E | −26.02054° S | 120 | 53.7 |
| 02 Middle to Johannesburg | Southbound | ||||||||
| 03 Middle to Johannesburg | Southbound | ||||||||
| 04 Middle to Johannesburg | Southbound | ||||||||
| 05 Fastlane to Johannesburg | Southbound | ||||||||
| 06 The On-Ramp from Allandale Road Eastbound | Southbound | ||||||||
| 07 Fastlane On-Ramp from Southbound Allandale Road Westbound/ South | Southbound | ||||||||
| 08 Allandale Road Westbound South | Southbound |
| Dates | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Period of the Day | 15 July 2019 | 16 July 2019 | 17 July 2019 | 18 July 2019 | 19 July 2019 | 20 July 2019 | 21 July 2019 | 22 July 2019 | 23 July 2019 | 24 July 2019 | 25 July 2019 |
| 1 | 3,341,710 | 2,983,388 | 2,641,849 | 2,801,686 | 3,149,121 | 4,001,741 | 3,672,468 | 3,072,077 | 3,018,337 | 2,580,080 | 2,972,918 |
| 2 | 53,977,726 | 57,151,756 | 58,909,411 | 58,997,111 | 55,141,717 | 31,656,476 | 18,118,469 | 57,166,991 | 52,530,890 | 45,540,650 | 50,633,314 |
| 3 | 44,563,790 | 51,774,523 | 53,660,753 | 54,200,042 | 55,202,710 | 49,038,868 | 39,984,691 | 51,207,120 | 52,552,942 | 50,879,340 | 55,267,964 |
| 4 | 37,314,172 | 44,059,377 | 42,247,899 | 43,742,987 | 44,436,625 | 35,664,486 | 40,107,832 | 43,313,392 | 43,933,290 | 44,450,832 | 46,201,607 |
| 5 | 6,681,025 | 7,303,247 | 7,879,124 | 8,042,897 | 10,606,950 | 11,862,415 | 8,520,364 | 6,689,887 | 7,055,296 | 7,722,493 | 9,165,914 |
| Dates | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Period of the Day | 15 July 2019 | 16 July 2019 | 17 July 2019 | 18 July 2019 | 19 July 2019 | 20 July 2019 | 21 July 2019 | 22 July 2019 | 23 July 2019 | 24 July 2019 | 25 July 2019 | 26 July 2019 | 27 July 2019 |
| 1 | 321,821 | 284,516 | 235,749 | 255,599 | 292,933 | 396,825 | 346,475 | 285,355 | 287,843 | 234,682 | 252,186 | 299,738 | 610,946 |
| 2 | 3,602,048 | 1,869,268 | 5,836,870 | 5,800,263 | 2,423,271 | 2,759,542 | 1,505,778 | 4,583,483 | 5,691,507 | 5,680,098 | 5,780,232 | 5,853,269 | 3,041,894 |
| 3 | 1,999,604 | 5,102,335 | 5,149,346 | 5,224,989 | 5,611,289 | 4,596,207 | 3,612,345 | 4,819,565 | 4,988,628 | 5,027,838 | 5,339,309 | 5,891,051 | 5,123,845 |
| 4 | 4,646,792 | 4,734,556 | 4,827,747 | 4,775,710 | 4,951,608 | 3,534,356 | 4,022,901 | 4,675,268 | 4,746,483 | 4,834,704 | 4,952,798 | 5,114,025 | 296,582 |
| 5 | 674,526 | 732,688 | 824,652 | 853,587 | 1,125,768 | 1,205,557 | 839,470 | 653,840 | 732,518 | 776,017 | 938,792 | 1,285,480 | |
| Dates | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Period of the Day | 15 July 2019 | 16 July 2019 | 17 July 2019 | 18 July 2019 | 19 July 2019 | 20 July 2019 | 21 July 2019 | 22 July 2019 | 23 July 2019 | 24 July 2019 | 25 July 2019 | 26 July 2019 | 27 July 2019 | 28 July 2019 | 29 July 2019 |
| 1 | 390,179 | 327,976 | 268,065 | 289,300 | 335,488 | 469,798 | 417,142 | 339,721 | 335,219 | 270,048 | 290,175 | 350,518 | 773,861 | 568,289 | 404,581 |
| 2 | 2,216,559 | 2,042,699 | 4,333,069 | 4,838,127 | 2,131,202 | 3,149,843 | 1,769,578 | 2,347,645 | 2,203,855 | 3,040,326 | 2,973,499 | 3,331,478 | 3,539,626 | 2,348,912 | 1,275,185 |
| 3 | 815,676 | 5,730,636 | 5,829,798 | 5,849,334 | 6,162,667 | 5,226,996 | 4,225,467 | 5,487,717 | 5,633,324 | 5,718,815 | 6,029,431 | 6,567,132 | 5,901,943 | 4,609,278 | 5,423,568 |
| 4 | 3,644,100 | 5,144,936 | 5,203,609 | 5,203,848 | 5,399,589 | 4,057,684 | 4,701,158 | 5,094,101 | 5,137,524 | 5,279,266 | 5,407,199 | 5,485,859 | 4,527,064 | 5,071,441 | 765,203 |
| 5 | 787,586 | 875,753 | 960,764 | 991,788 | 1,326,893 | 1,424,255 | 1,035,343 | 766,568 | 837,739 | 892,657 | 1,095,860 | 1,517,427 | 1,695,464 | 1,333,457 | |
| Dates | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Period of the Day | 15 July 2019 | 16 July 2019 | 17 July 2019 | 18 July 2019 | 19 July 2019 | 20 July 2019 | 21 July 2019 | 22 July 2019 | 23 July 2019 | 24 July 2019 | 25 July 2019 | 26 July 2019 | 27 July 2019 |
| 1 | 574,868 | 504,994 | 425,123 | 468,260 | 531,622 | 710,172 | 623,026 | 520,392 | 522,734 | 434,026 | 477,027 | 549,520 | 1,099,849 |
| 2 | 5,416,190 | 4,544,699 | 6,666,994 | 6,469,966 | 3,682,757 | 5,135,566 | 2,821,822 | 5,240,023 | 5,280,114 | 5,273,322 | 5,765,438 | 5,956,048 | 5,588,665 |
| 3 | 6,882,973 | 9,543,915 | 9,737,896 | 9,880,675 | 10,412,641 | 8,544,563 | 6,737,959 | 9,095,988 | 9,350,828 | 9,518,832 | 10,046,177 | 10,928,995 | 9,559,681 |
| 4 | 7,996,735 | 8,120,977 | 8,284,089 | 8,244,838 | 8,571,413 | 6,335,493 | 7,167,665 | 7,948,635 | 8,063,400 | 8,284,807 | 8,576,608 | 8,947,607 | 366,385 |
| 5 | 1,163,614 | 1,323,411 | 1,431,353 | 1,481,270 | 1,993,989 | 2,103,922 | 1,490,162 | 1,145,786 | 1,259,688 | 1,339,216 | 1,640,843 | 2,286,731 | |
| Dates | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Period of the Day | 15 July 2019 | 16 July 2019 | 17 July 2019 | 18 July 2019 | 19 July 2019 | 20 July 2019 | 21 July 2019 | 22 July 2019 | 23 July 2019 | 24 July 2019 | 25 July 2019 | 26 July 2019 |
| 1 | 1,021,527 | 945,044 | 797,486 | 833,213 | 961,670 | 1,255,697 | 1,106,365 | 968,462 | 962,808 | 817,024 | 883,234 | 997,146 |
| 2 | 10,823,115 | 9,909,632 | 11,188,930 | 11,043,824 | 11,309,548 | 9,732,065 | 5,347,205 | 11,174,255 | 10,663,524 | 9,850,399 | 10,791,670 | 12,106,587 |
| 3 | 12,567,075 | 12,259,622 | 17,256,690 | 17,241,171 | 17,338,897 | 15,446,793 | 12,179,020 | 16,316,704 | 15,960,378 | 16,765,428 | 17,689,342 | 18,360,307 |
| 4 | 14,038,494 | 14,120,725 | 14,320,182 | 14,195,183 | 10,090,051 | 11,135,014 | 12,679,847 | 13,810,047 | 14,025,189 | 14,115,094 | 14,698,109 | 15,520,252 |
| 5 | 2,045,141 | 2,287,602 | 2,457,236 | 2,557,637 | 3,472,005 | 3,738,633 | 2,645,941 | 2,023,783 | 2,193,621 | 2,314,826 | 2,820,308 | 607,144 |
| Dates | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Period of the Day | 15 July 2019 | 16 July 2019 | 17 July 2019 | 18 July 2019 | 19 July 2019 | 20 July 2019 | 21 July 2019 | 22 July 2019 | 23 July 2019 | 24 July 2019 | 25 July 2019 | 26 July 2019 | 27 July 2019 | 28 July 2019 | 29 July 2019 |
| 1 | 6,983 | 7,617 | 6,508 | 6,883 | 8,209 | 11,286 | 10,399 | 7,839 | 6,941 | 6,185 | 228,716 | 7,956 | 14,480 | 11,976 | 6,939 |
| 2 | 224,281 | 218,494 | 224,619 | 227,947 | 215,095 | 77,622 | 46,099 | 227,613 | 225,165 | 162,713 | 175,226 | 227,637 | 80,516 | 54,909 | 205,804 |
| 3 | 138,796 | 165,058 | 167,919 | 165,493 | 178,113 | 150,937 | 120,560 | 160,484 | 164,332 | 162,785 | 189,282 | 196,424 | 167,500 | 137,369 | 161,353 |
| 4 | 174,386 | 177,442 | 183,483 | 179,768 | 179,424 | 117,872 | 114,460 | 171,007 | 177,787 | 115,017 | 33,283 | 189,045 | 137,601 | 122,157 | 176,988 |
| 5 | 23,199 | 27,515 | 28,339 | 31,839 | 36,712 | 38,355 | 25,727 | 22,364 | 25,031 | 29,796 | 42,752 | 42,704 | 30,649 | 25,172 | |
| Dates | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Period of the Day | 15 July 2019 | 16 July 2019 | 17 July 2019 | 18 July 2019 | 19 July 2019 | 20 July 2019 | 21 July 2019 | 22 July 2019 | 23 July 2019 |
| 1 | 546,367 | 482,234 | 457,114 | 468,548 | 531,924 | 692,344 | 735,485 | 477,644 | 495,049 |
| 2 | 7,285,542 | 7,808,757 | 7,881,875 | 7,160,722 | 10,484,089 | 5,601,963 | 3,155,617 | 6,150,666 | 8,831,958 |
| 3 | 8,182,853 | 8,606,634 | 9,160,064 | 9,709,841 | 9,954,823 | 8,455,720 | 6,619,302 | 8,703,442 | 9,203,793 |
| 4 | 8,119,554 | 4,207,789 | 8,323,528 | 8,310,533 | 8,384,411 | 6,353,075 | 6,625,680 | 7,849,427 | 7,542,791 |
| 5 | 1,222,441 | 1,352,689 | 1,424,097 | 1,495,007 | 1,889,016 | 2,097,680 | 1,472,727 | 1,197,611 | |
References
- Li, Z.; Schonfeld, P. Hybrid simulated annealing and genetic algorithm for optimizing arterial signal timings under oversaturated traffic conditions. J. Adv. Transp. 2015, 49, 153–170. [Google Scholar] [CrossRef]
- Xu, H.; Zhuo, Z.; Chen, J.; Fang, X. Traffic signal coordination control along oversaturated two-way arterials. PeerJ Comput. Sci. 2020, 6, e319. [Google Scholar] [CrossRef]
- Khan, M.U.; Saeed, S.; Nehdi, M.L.; Rehan, R. Macroscopic Traffic-Flow Modelling Based on Gap-Filling Behavior of Heterogeneous Traffic. Appl. Sci. 2021, 11, 4278. [Google Scholar] [CrossRef]
- Ranjan, N.; Bhandari, S.; Khan, P.; Hong, Y.-S.; Kim, H. Large-Scale Road Network Congestion Pattern Analysis and Prediction Using Deep Convolutional Autoencoder. Sustainability 2021, 13, 5108. [Google Scholar] [CrossRef]
- Drop, N.; Garlińska, D. Evaluation of Intelligent Transport Systems Used in Urban Agglomerations and Intercity Roads by Professional Truck Drivers. Sustainability 2021, 13, 2935. [Google Scholar] [CrossRef]
- Olayode, I.; Tartibu, L.; Okwu, M.; Uchechi, U. Intelligent transportation systems, un-signalized road intersections and traffic congestion in Johannesburg: A systematic review. Procedia CIRP 2020, 91, 844–850. [Google Scholar] [CrossRef]
- Van Brummelen, J.; O’Brien, M.; Gruyer, D.; Najjaran, H. Autonomous vehicle perception: The technology of today and tomorrow. Transp. Res. Part. C Emerg. Technol. 2018, 89, 384–406. [Google Scholar] [CrossRef]
- Kuutti, S.; Fallah, S.; Katsaros, K.; Dianati, M.; Mccullough, F.; Mouzakitis, A. A survey of the state-of-the-art localization techniques and their potentials for autonomous vehicle applications. IEEE Internet Things J. 2018, 5, 829–846. [Google Scholar] [CrossRef]
- Garner, D.; Louw, J.; Burnett, S. Towards resolving congestion in Gauteng. In Proceedings of the SATC—South African Transport Conference Meeting the Transport Challenges in Southern Africa, Johannesburg, South Africa, 16–20 July 2001. [Google Scholar]
- Olayode, O.; Tartibu, L.; Okwu, M. Application of Artificial Intelligence in Traffic Control System of Non-autonomous Vehicles at Signalized Road Intersection. Procedia CIRP 2020, 91, 194–200. [Google Scholar] [CrossRef]
- Chakwizira, J. The question of road traffic congestion and decongestion in the greater Johannesburg area: Some perspectives. In Proceedings of the SATC—South African Transport Conference Meeting the Transport Challenges in Southern Africa, Johannesburg, South Africa, 9–12 July 2007. [Google Scholar]
- AlRashidi, M.R.; El-Hawary, M.E. A survey of particle swarm optimization applications in electric power systems. IEEE Trans. Evol. Comput. 2008, 13, 913–918. [Google Scholar] [CrossRef]
- Jain, N.K.; Nangia, U.; Jain, A. PSO for multiobjective economic load dispatch (MELD) for minimizing generation cost and transmission losses. J. Inst. Eng. Ser. B 2016, 97, 185–191. [Google Scholar] [CrossRef]
- Abido, M.A. Optimal power flow using particle swarm optimization. Int. J. Electr. Power Energy Syst. 2002, 24, 563–571. [Google Scholar] [CrossRef]
- Liang, R.-H.; Tsai, S.-R.; Chen, Y.-T.; Tseng, W.-T. Optimal power flow by a fuzzy based hybrid particle swarm optimization approach. Electr. Power Syst. Res. 2011, 81, 1466–1474. [Google Scholar] [CrossRef]
- Salomon, C.P.; Lambert-Torres, G.; Martins, H.G.; Ferreira, C.; Costa, C.I. Load flow computation via particle swarm optimization. In Proceedings of the 2010 9th IEEE/IAS International Conference on Industry Applications-INDUSCON, Sao Paulo, Brazil, 8–10 November 2010; pp. 1–6. [Google Scholar]
- Acharjee, P.; Goswami, S. Chaotic Particle Swarm Optimization based reliable algorithm to overcome the limitations of conventional power flow methods. In Proceedings of the 2009 IEEE/PES Power Systems Conference and Exposition, Washington, DC, USA, 15–18 March 2009; pp. 1–7. [Google Scholar]
- Gaing, Z.-L. A particle swarm optimization approach for optimum design of PID controller in AVR system. IEEE Trans. Energy Convers. 2004, 19, 384–391. [Google Scholar] [CrossRef] [Green Version]
- Yapıcı, H.; Çetinkaya, N. An improved particle swarm optimization algorithm using eagle strategy for power loss minimization. Math. Probl. Eng. 2017, 2017, 1063045. [Google Scholar] [CrossRef] [Green Version]
- Nimtawat, A.; Nanakorn, P. Simple particle swarm optimization for solving beam-slab layout design problems. Procedia Eng. 2011, 14, 1392–1398. [Google Scholar] [CrossRef]
- Mac, T.T.; Copot, C.; Tran, D.T.; de Keyser, R. A hierarchical global path planning approach for mobile robots based on multi-objective particle swarm optimization. Appl. Soft Comput. 2017, 59, 68–76. [Google Scholar] [CrossRef]
- Islam, M.J.; Li, X.; Mei, Y. A time-varying transfer function for balancing the exploration and exploitation ability of a binary PSO. Appl. Soft Comput. 2017, 59, 182–196. [Google Scholar] [CrossRef]
- Suresh, A.; Harish, K.; Radhika, N. Particle swarm optimization over back propagation neural network for length of stay prediction. Procedia Comput. Sci. 2015, 46, 268–275. [Google Scholar] [CrossRef] [Green Version]
- Zou, R.; Kalivarapu, V.; Winer, E.; Oliver, J.; Bhattacharya, S. Particle swarm optimization-based source seeking. IEEE Trans. Autom. Sci. Eng. 2015, 12, 865–875. [Google Scholar] [CrossRef] [Green Version]
- Wen, P.; Zhi, M.; Zhang, G.; Li, S. Fault prediction of elevator door system based on PSO-BP neural network. Engineering 2016, 8, 761–766. [Google Scholar] [CrossRef] [Green Version]
- Gong, T.; Tuson, A.L. Particle swarm optimization for quadratic assignment problems-a forma analysis approach. Int. J. Comput. Intell. Res. 2008, 4, 177–185. [Google Scholar] [CrossRef]
- Liu, Z.; Zhao, R. Equipment Possession Quantity Modeling and Particle Swarm Optimization. In Proceedings of the 2009 Third International Conference on Genetic and Evolutionary Computing, Guilin, China, 14–17 October 2009; pp. 628–632. [Google Scholar]
- Li, J.-q.; Pan, Q.-k.; Xie, S.-x.; Jia, B.-x.; Wang, Y.-t. A hybrid particle swarm optimization and tabu search algorithm for flexible job-shop scheduling problem. Int. J. Comput. Theory Eng. 2010, 2, 189. [Google Scholar] [CrossRef] [Green Version]
- Bhushan, B.; Pillai, S.S. Particle swarm optimization and firefly algorithm: Performance analysis. In Proceedings of the 2013 3rd IEEE International Advance Computing Conference (IACC), Ghaziabad, UP, India, 22–23 February 2013; pp. 746–751. [Google Scholar]
- Angeline, P.J. Using selection to improve particle swarm optimization. In Proceedings of the 1998 IEEE International Conference on Evolutionary Computation Proceedings, IEEE World Congress on Computational Intelligence (Cat. No. 98TH8360), Anchorage, AK, USA, 4–9 May 1998; pp. 84–89. [Google Scholar]
- Chen, Y.-P.; Peng, W.-C.; Jian, M.-C. Particle swarm optimization with recombination and dynamic linkage discovery. IEEE Trans. Syst. ManCybern. Part B 2007, 37, 1460–1470. [Google Scholar] [CrossRef]
- Sharaf, A.M.; El-Gammal, A.A. A novel discrete multi-objective Particle Swarm Optimization (MOPSO) of optimal shunt power filter. In Proceedings of the 2009 IEEE/PES Power Systems Conference and Exposition, Seattle, WA, USA, 15–18 March 2009; pp. 1–7. [Google Scholar]
- Goh, C.K.; Tan, K.C.; Liu, D.; Chiam, S.C. A competitive and cooperative co-evolutionary approach to multi-objective particle swarm optimization algorithm design. Eur. J. Oper. Res. 2010, 202, 42–54. [Google Scholar] [CrossRef]
- Harrison, K.R.; Ombuki-Berman, B.; Engelbrecht, A.P. Knowledge Transfer Strategies for Vector Evaluated Particle Swarm Optimization; Technical Report CS-12-07; Brock University, Department of Computer Science: St. Catharines, ON, Canada, 2012. [Google Scholar]
- Benedetti, M.; Azaro, R.; Massa, A. Memory enhanced PSO-based optimization approach for smart antennas control in complex interference scenarios. IEEE Trans. Antennas Propag. 2008, 56, 1939–1947. [Google Scholar] [CrossRef]
- Duan, H.; Li, P.; Yu, Y. A predator-prey particle swarm optimization approach to multiple UCAV air combat modeled by dynamic game theory. IEEE/CAA J. Autom. Sin. 2015, 2, 11–18. [Google Scholar]
- Liang, J.J.; Qin, A.K.; Suganthan, P.N.; Baskar, S. Comprehensive learning particle swarm optimizer for global optimization of multimodal functions. IEEE Trans. Evol. Comput. 2006, 10, 281–295. [Google Scholar] [CrossRef]
- Li, C.; Yang, S.; Nguyen, T.T. A self-learning particle swarm optimizer for global optimization problems. IEEE Trans. Syst. ManCybern. Part. B Cybern. 2011, 42, 627–646. [Google Scholar]
- Zhan, Z.-H.; Zhang, J.; Li, Y.; Shi, Y.-H. Orthogonal learning particle swarm optimization. IEEE Trans. Evol. Comput. 2010, 15, 832–847. [Google Scholar] [CrossRef] [Green Version]
- Schutte, J.F.; Groenwold, A.A. A study of global optimization using particle swarms. J. Glob. Optim. 2005, 31, 93–108. [Google Scholar] [CrossRef]
- Liu, W.-B.; Wang, X.-J. An evolutionary game based particle swarm optimization algorithm. J. Comput. Appl. Math. 2008, 214, 30–35. [Google Scholar] [CrossRef] [Green Version]
- Hossen, M.S.; Rabbi, F.; Rahman, M.M. Adaptive Particle Swarm Optimization (APSO) for multimodal function optimization. Int. J. Eng. Technol. 2009, 1, 98–103. [Google Scholar]
- Benmessahel, B.; Touahria, M. An improved combinatorial particle swarm optimization algorithm to database vertical partition. J. Emerg. Trends Comput. Inf. Sci. 2011, 2, 130–135. [Google Scholar]
- Ji, W.; Wang, K. An improved particle swarm optimization algorithm. In Proceedings of the 2011 International Conference on Computer Science and Network Technology, Harbin, China, 24–26 December 2011; pp. 585–589. [Google Scholar]
- Safa, M.; Shariati, M.; Ibrahim, Z.; Toghroli, A.; Bin, B.S.; Norazman, M.N.; Petkovic, D. Potential of adaptive neuro fuzzy inference system for evaluating the factors affecting steel-concrete composite beam’s shear strength. Steel Compos. Struct. 2016, 21, 679–688. [Google Scholar] [CrossRef]
- Mohammadhassani, M.; Nezamabadi-Pour, H.; Suhatril, M.; Shariati, M. An evolutionary fuzzy modelling approach and comparison of different methods for shear strength prediction of high-strength concrete beams without stirrups. Smart Struct. Syst. Int. J. 2014, 14, 785–809. [Google Scholar] [CrossRef]
- Shariati, M.; Faegh, S.S.; Mehrabi, P.; Bahavarnia, S.; Zandi, Y.; Masoom, D.R.; Toghroli, A.; Trung, N.-T.; Salih, M.N.A. Numerical study on the structural performance of corrugated low yield point steel plate shear walls with circular openings. Steel Compos. Struct. 2019, 33, 569–581. [Google Scholar]
- Sharafi, P.; Rashidi, M.; Samali, B.; Ronagh, H.; Mortazavi, M. Identification of factors and decision analysis of the level of modularization in building construction. J. Archit. Eng. 2018, 24, 04018010. [Google Scholar] [CrossRef]
- Taheri, E.; Firouzianhaji, A.; Usefi, N.; Mehrabi, P.; Ronagh, H.; Samali, B. Investigation of a method for strengthening perforated cold-formed steel profiles under compression loads. Appl. Sci. 2019, 9, 5085. [Google Scholar] [CrossRef] [Green Version]
- Ahmadi, R.; Rashidian, O.; Abbasnia, R.; Nav, F.M.; Usefi, N. Experimental and numerical evaluation of progressive collapse behavior in scaled RC beam-column subassemblage. Shock Vib. 2016, 2016. [Google Scholar] [CrossRef]
- Nguyen, H.; Drebenstedt, C.; Bui, X.-N.; Bui, D.T. Prediction of blast-induced ground vibration in an open-pit mine by a novel hybrid model based on clustering and artificial neural network. Nat. Resour. Res. 2020, 29, 691–709. [Google Scholar] [CrossRef]
- Olayode, I.O.; Tartibu, L.K.; Okwu, M.O. Traffic flow Prediction at Signalized Road Intersections: A case of Markov Chain and Artificial Neural Network Model. In Proceedings of the 2021 IEEE 12th International Conference on Mechanical and Intelligent Manufacturing Technologies (ICMIMT), Cape Town, South Africa, 12 July 2021; pp. 287–292. [Google Scholar]
- Kennedy, J.; Eberhart, R.C. A discrete binary version of the particle swarm algorithm. In Proceedings of the 1997 IEEE International Conference on Systems, Man, and Cybernetics. Computational Cybernetics and Simulation, Orlando, FL, USA, 12–15 October 1997; Volume 5, pp. 4104–4108. [Google Scholar]
- Atashpaz-Gargari, E.; Lucas, C. Imperialist competitive algorithm: An algorithm for optimization inspired by imperialistic competition. In Proceedings of the 2007 IEEE Congress on Evolutionary Computation, Singapore, 25–28 September 2007; pp. 4661–4667. [Google Scholar]
- Lazzús, J.A.J.M.; Modelling, C. Neural network-particle swarm modeling to predict thermal properties. Math. Comput. Model. 2013, 57, 2408–2418. [Google Scholar] [CrossRef]
- Xing, B.; Gao, W.-J. Cat Swarm Optimization Algorithm. In Innovative Computational Intelligence: A Rough Guide to 134 Clever Algorithms; Springer: Berlin, Germany, 2014; pp. 93–104. [Google Scholar]
- Celtek, S.A.; Durdu, A.; Alı, M.E.M. Real-time traffic signal control with swarm optimization methods. Measurement 2020, 166, 108206. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, WA, Australia, 1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Eberhart, R.C.; Shi, Y.; Kennedy, J. Swarm Intelligence; Elsevier: Amsterdam, The Netherlands, 2001. [Google Scholar]
- Alam, M.N.; Das, B.; Pant, V. A comparative study of metaheuristic optimization approaches for directional overcurrent relays coordination. Electr. Power Syst. Res. 2015, 128, 39–52. [Google Scholar] [CrossRef]
- Kumar, K.; Parida, M.; Katiyar, V. Short term traffic flow prediction for a non urban highway using artificial neural network. Procedia Soc. Behav. Sci. 2013, 104, 755–764. [Google Scholar] [CrossRef] [Green Version]
- Goves, C.; North, R.; Johnston, R.; Fletcher, G. Short term traffic prediction on the UK motorway network using neural networks. Transp. Res. Procedia 2016, 13, 184–195. [Google Scholar] [CrossRef] [Green Version]







| Author(s) | Types of PSO | Aims | Key Findings |
|---|---|---|---|
| [29] | Particle swarm optimization and firefly algorithm (FFA) | This paper aimed to compare the performance of PSO and the firefly algorithm by using almost ten non-linear functions. The time and mean values of the non-linear functions were used as the input and output variables. | The result showed that the non-linear functions and time value is smaller compared with the firefly algorithm. |
| [30] | Particle swarm optimization PSO | The aim was to apply PSO on four test functions to achieve an adequate selection of particles. | The study implied that not all test functions were improved in terms of performance. |
| [31] | Particle swarm optimization-recombination and dynamic linkage discovery (PSO-RDL) | The aim was to use this hybrid PSO-RDL to solve economic dispatch in the power system. | They discovered that the performance of PSO-RDL was similar to a modified particle swarm optimization (MPSO) |
| Input Variables | Output Variables |
|---|---|
| Traffic density | Traffic Volume |
| Number of light vehicles | |
| The average speed of light vehicles | |
| Time of day of light vehicles | |
| The average speed of a long truck | |
| Time of day of long truck | |
| Number of long trucks | |
| The average speed of a medium truck | |
| Time of day of medium truck | |
| Number of medium trucks | |
| Number of short trucks | |
| The average speed of a short truck | |
| Time of day of short truck |
| Traffic Data Collection Equipment | Traffic Data |
|---|---|
| Data Loggers | Vehicular Speed |
| Loop Detectors | Vehicular Speed. Distance. Time. |
| Video Cameras | Number of Vehicles |
| Acceleration Factor | Swarm Population Size | Number of Neurons | ||
|---|---|---|---|---|
| Value of the parameters | C1 | C2 | ||
| 1 | 2.0 | 10 | 5 | |
| 1.5 | 2.25 | 20 | 6 | |
| 2 | 2.5 | 50 | 7 | |
| 2.25 | 2.75 | 100 | 8 | |
| 2.5 | 3.0 | 200 | 9 | |
| 400 | 10 | |||
| Roadsites | Training | Testing | Total |
|---|---|---|---|
| Brakfontein 1C N1 SB (Roadsite 1852) | 51 | 10 | 61 |
| Old Johannesburg road SB off-ramp (Roadsite 1854) | 64 | 10 | 74 |
| Samrand Avenue SB off-ramp (Roadsite 1856) | 54 | 10 | 64 |
| Olifantsfnt SB off-ramp (Roadsite 1858) | 50 | 10 | 60 |
| New road SB off-ramp (Roadsite 1860) | 47 | 10 | 57 |
| Allandale road SB IC off-ramp (Roadsite 1862) | 64 | 10 | 74 |
| Allandale road SB on-ramp (Roadsite 1863) | 34 | 10 | 44 |
| 364 | 70 | 434 |
| Number of Neurons | Swarm Population Size | C1 | C2 | Training (R2) | MSE | Testing (R2) |
|---|---|---|---|---|---|---|
| 5 | 10 | 2.25 | 2 | 0.97306 | 47.128 | 0.9314 |
| 5 | 20 | 2.25 | 2 | 0.96982 | 52.781 | 0.7838 |
| 5 | 50 | 1.5 | 2.25 | 0.98313 | 29.734 | 0.9769 |
| 5 | 100 | 1 | 2.75 | 0.97102 | 50.590 | 0.9784 |
| 5 | 200 | 1.5 | 2 | 0.98566 | 25.228 | 0.8660 |
| 5 | 400 | 1.5 | 2 | 0.98356 | 28.921 | 0.9822 |
| 6 | 10 | 1 | 3 | 0.98452 | 27.227 | 0.9423 |
| 6 | 20 | 2 | 2.25 | 0.97620 | 41.817 | 0.9781 |
| 6 | 50 | 1 | 2.5 | 0.98758 | 22.007 | 0.8595 |
| 6 | 100 | 1 | 2.5 | 0.99172 | 14.694 | 0.8917 |
| 6 | 200 | 1 | 2.75 | 0.96347 | 63.516 | 0.9681 |
| 6 | 400 | 1 | 2.25 | 0.98569 | 25.173 | 0.9140 |
| 7 | 10 | 1.5 | 2.5 | 0.98005 | 35.093 | 0.8268 |
| 7 | 20 | 1 | 2.75 | 0.98942 | 18.736 | 0.9353 |
| 7 | 50 | 1 | 2.5 | 0.98819 | 20.849 | 0.9411 |
| 7 | 100 | 1 | 2.5 | 0.99299 | 12.453 | 0.9591 |
| 7 | 200 | 1.5 | 2.25 | 0.99314 | 12.199 | 0.9486 |
| 7 | 400 | 2 | 2 | 0.98688 | 23.118 | 0.9661 |
| 8 | 10 | 1 | 2.75 | 0.97769 | 39.122 | 0.9546 |
| 8 | 20 | 1 | 2.5 | 0.98570 | 25.162 | 0.9401 |
| 8 | 50 | 1.5 | 2.25 | 0.99391 | 10.849 | 0.9276 |
| 8 | 100 | 1 | 2.5 | 0.98571 | 25.128 | 0.9100 |
| 8 | 200 | 1 | 2.75 | 0.98816 | 20.877 | 0.9716 |
| 8 | 400 | 1 | 2.25 | 0.99490 | 90.219 | 0.8880 |
| 9 | 10 | 1 | 2.75 | 0.98235 | 31.076 | 0.9356 |
| 9 | 20 | 1 | 3 | 0.96028 | 69.016 | 0.9800 |
| 9 | 50 | 1.5 | 2.25 | 0.99290 | 12.598 | 0.9090 |
| 9 | 100 | 2 | 2 | 0.98634 | 24.048 | 0.7637 |
| 9 | 200 | 1.5 | 2.25 | 0.98993 | 17.757 | 0.8790 |
| 9 | 400 | 1 | 2.5 | 0.99361 | 11.290 | 0.8218 |
| 10 | 10 | 1 | 2.75 | 0.97468 | 44.281 | 0.9897 |
| 10 | 20 | 1.5 | 2.5 | 0.97177 | 49.340 | 0.9564 |
| 10 | 50 | 1.5 | 2.5 | 0.97826 | 38.098 | 0.8602 |
| 10 | 100 | 1 | 2.75 | 0.99122 | 15.536 | 0.9627 |
| 10 | 200 | 1 | 2.75 | 0.99078 | 16.265 | 0.9056 |
| 10 | 400 | 1.5 | 2.5 | 0.98950 | 18.500 | 0.9246 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Olayode, I.O.; Tartibu, L.K.; Okwu, M.O.; Ukaegbu, U.F. Development of a Hybrid Artificial Neural Network-Particle Swarm Optimization Model for the Modelling of Traffic Flow of Vehicles at Signalized Road Intersections. Appl. Sci. 2021, 11, 8387. https://doi.org/10.3390/app11188387
Olayode IO, Tartibu LK, Okwu MO, Ukaegbu UF. Development of a Hybrid Artificial Neural Network-Particle Swarm Optimization Model for the Modelling of Traffic Flow of Vehicles at Signalized Road Intersections. Applied Sciences. 2021; 11(18):8387. https://doi.org/10.3390/app11188387
Chicago/Turabian StyleOlayode, Isaac Oyeyemi, Lagouge Kwanda Tartibu, Modestus O. Okwu, and Uchechi Faithful Ukaegbu. 2021. "Development of a Hybrid Artificial Neural Network-Particle Swarm Optimization Model for the Modelling of Traffic Flow of Vehicles at Signalized Road Intersections" Applied Sciences 11, no. 18: 8387. https://doi.org/10.3390/app11188387