1. Introduction
It is always a challenge for marine radar to detect weak target effectively under the background of complex sea clutter. At the moment, the methods widely used in X-band marine radar target detection are divided into two categories [
1]: constant false alarm rate (CFAR) for target detection and track before detect(TBD) for target tracking.
Based on the background clutter statistical model, the CFAR detector adaptively determines the threshold through the known background clutter distribution and the preset false alarm rate [
2]. For different sea clutter background distributions, the first proposed CFAR is the cell-averaging CFAR (CA-CFAR). CA-CFAR estimates the gray level of sea clutter by calculating the mean value of the reference unit at both ends of the range unit [
3], whereas its detection performance will significantly reduce in multi-target and inhomogeneous environments. Hence, Rohling et al. proposed an order statistics CFAR (OS-CFAR) [
4]. It estimates the gray level of sea clutter by orderly arranging the gray values in the reference unit. Although OS-CFAR has achieved good detection results in multi-target and inhomogeneous environments, its detection performance will decline in uniform environments. In order to solve the above problem, Gandhi et al. proposed a trimmed mean CFAR (TM-CFAR) [
5]. TM-CFAR improves its detection performance in uniform environment by deleting a certain number of minimum values and maximum values in the sorted reference unit gray value sequence. In the meantime, the Bayesian method was introduced to improve the robustness of the CFAR detector [
6]. A Bayesian detector reduces the influence of the interfering targets by modeling and removing them. However, such detectors require appropriate prior information and are computationally complex. Recently, a CFAR based on weighted likelihood (WL) estimator for Weibull clutter with known shape parameter is proposed [
7]. WL-CFAR estimates the scale parameters of Weibull distribution by maximizing the weighted log likelihood function. This method has perfect effects in both uniform and inhomogeneous environments. Due to the fact that the CFAR detector only depends on the gray value information of marine radar, this method can only have stable detection effect for targets with high SNR.
Compared with the CFAR method, TBD utilizes multiple original marine radar images to accumulate energy and extract useful energy without threshold detection. Among marine radar TBD methods, the most common filtering methods are Kalman filter (KF) and Particle filter (PF). Chen et al. proposed a sampling importance resampling particle filter (SIR-PF) in [
8]. Based on a sequence of practical X-band marine radar images, SIR-PF uses two histogram-based target models that include a kernel-weighted histogram model and a background-weighted histogram model to estimate only target positions. After that, Chen et al. proposed a combined PF-KF approach [
1]. In the combined PF-KF approach, PF is used to estimate target coordinates, and then KF further determines the target position and speed according to the results derived from PF. In [
9], the motion information of the target is estimated from marine radar images by combining SIR-PF with visual tracking strategies based on template matching. As mentioned earlier, the main idea of TBD is to enhance the target gray value through energy accumulation.
The key problem of radar weak target detection is how to improve SNR. There are two methods to improve SNR. In addition to enhancing the gray value of the target, it can also suppress the sea clutter gray value [
10]. The precondition of suppressing sea clutter is that the target and sea clutter can be distinguished in a certain dimension. Therefore, the characteristic differences between target and sea clutter in different dimensions such as the spatio-temporal domain, time-frequency domain and range Doppler domain should be analyzed [
11].
The electromagnetic wave emitted by radar radiates on the sea surface to form backscattering echo is defined as sea clutter. Due to the fact that the variation of amplitude of sea clutter is a stochastic process, that is, it is non-stationary in time and inhomogeneous in space, the characteristics of sea clutter are extremely complex. Moreover, sea clutter will be severely affected by wind speed, current velocity, temperature and humidity of the sea surface. As a result, the characteristics of sea clutter in different environments change significantly, which makes it difficult to establish a sea clutter model and suppress sea clutter.
At present, target detection methods under sea clutter suppression are mainly divided into four categories in [
12,
13,
14]: time-domain cancellation method, subspace decomposition method, neural network clutter suppression method and time-frequency analysis. Time-domain cancellation method mainly includes moving target indication (MTI) [
15], motion target detection (MTD) [
16,
17,
18,
19,
20], adaptive moving target indication (AMTI) [
21,
22], space-time adaptive processing (STAP) [
23,
24,
25,
26] and root loop cancellation method [
27,
28]. The MTI method uses the difference of Doppler frequency between the target signal and the sea clutter signal to design the filter so that the band stop notch of the filter is aligned with the center frequency of sea clutter as much as possible to realize the suppression of the sea clutter. Based on MTI, MTD method connects a group of adjacent and partially overlapping filters to cover the entire Doppler frequency range so as to realize the detection of moving targets with specific Doppler frequency shifts. AMTI adaptively estimates the center Doppler frequency of sea clutter based on MTI. The realization of STAP depends on the accurate estimation of clutter covariance matrix containing Doppler frequency information. The root loop cancellation method uses the time–Doppler frequency information of the signal to estimate the first-order Bragg peak of sea clutter, thereby reconstructing sea clutter in the time domain and subtracting it from the signal to suppress sea clutter [
29,
30]. These methods need Doppler information of radar signals, and it is not applicable to radar signals without Doppler information.
Subspace decomposition method mainly includes using eigenvalue decomposition [
31,
32,
33,
34] and singular value decomposition (SVD) [
35,
36,
37,
38] to suppress sea clutter. Among them, the SVD method is a typical research content and a method based on the characteristics of the first-order Bragg peak of sea clutter in the Doppler domain. The Hankel matrix is constructed by using the signal pulse sequence of a certain range bin, and the singular value decomposition of the Hankel matrix is calculated. After that, the signal is decomposed into clutter subspace, signal subspace and noise subspace. At the next stage, the singular value corresponding to clutter subspace is set to zero to obtain the reduced rank Hankel matrix. At last, the reduced rank Hankel matrix is used to reconstruct the time-domain signal, and the sea clutter suppressed time-domain signal can be obtained. Similarly to the time-domain cancellation method, the subspace decomposition method also needs to use the Doppler information of radar signal to suppress sea clutter.
Neural network clutter suppression method includes convolutional neural network [
14,
39,
40,
41], radial basis function neural network [
13,
42,
43], wavelet neural network [
44,
45], etc. The neural network clutter suppression method is to train and optimize itself by using the chaotic characteristics and predictability of sea clutter and, thus, to establish the prediction model of sea clutter. Afterwards, the trained network model is used to predict the unknown sea clutter time series in one or more steps. Even so, this method manually adjusts network structure and parameters according to prior information for different sea clutter data. Moreover, this method requires radar to accumulate pulse for long periods of time in dwell mode to establish a sea clutter prediction model, which is not suitable for radar with short time accumulation pulse in scanning mode.
The time-frequency analysis method uses the principle that sea clutter and target have different time-frequency characteristics in time-frequency domain to suppress sea clutter. Short time Fourier transform [
46,
47], fractional Fourier transform [
48,
49,
50,
51,
52] and sparse Fourier transform [
53,
54,
55] all belong to this method. This method transforms the time series data on a range bin into time-frequency domain by using different time-frequency transform. Later, the location of the frequency aggregation of the target signal is found in the time-frequency domain. Afterwards, the target is extracted and the effect of suppressing sea clutter is achieved. In the same manner, this method only has perfect effects on linear frequency modulation signals and needs the radar to accumulate pulse for a long time in dwell mode. In addition, there is another time-frequency analysis that maps one-dimensional time signal to two-dimensional TF plane by using TF joint representation in [
56,
57,
58,
59]. Similarly to the time-domain cancellation method, this method also needs to use the Doppler information of the radar signal.
Among the time-frequency analysis methods, there is also a time-domain analysis method applied to sea clutter suppression. The empirical mode decomposition (EMD) [
60,
61,
62,
63] method is a local feature analysis method based on time domain. It can extract transient and steady-state information according to the time-domain signal amplitude sequence. However, the performance of EMD is affected by sampling frequency. When sampling frequency is low, the EMD method has excellent suppression effects on sea clutter around the micro-motion target or floating target. Nonetheless, the suppression performance of sea clutter around fast moving targets will decrease, but it is still effective.
The vast majority of marine radar is a slow rotating noncoherent radar with monopulse system. There is only amplitude and position information but lack of phase information in its signal data. In addition, its working mode is scanning, which is different from the dwell mode. In order to take into account scanning efficiency, the scanning mode usually accumulates few pulses in a short period of time on a range bin; thus, marine radar belongs to short-time accumulation radar. Moreover, since the time interval between two consecutive frames is about 2.5s, the time resolution of marine radar is low. Therefore, except the EMD method, the above target detection methods under sea clutter suppression are not suitable for marine radar.
Due to the characteristics of low production cost, simple operation, all-weather work and long working distance, marine radar has become an essential equipment for all types of ships. Marine radar is mainly used to detect objects that affect navigation safety around ships, such as other ships, navigation marks, floating ice and islands. It is an important instrument for mariners to avoid collisions, navigate, locate, observe and rescue [
64]. Among them, the detection of unknown floating weak targets on the sea surface is the most important task. However, due to the inherent properties of marine radar, it is extremely difficult to detect weak targets in severe sea clutter interference, and most target detection algorithms under sea clutter suppression are not applicable. Therefore, it is urgent to research a method that only uses signal amplitude information to suppress sea clutter and detect targets.
Inspired by the wave parameter inversion theory of X-band marine radar [
65,
66,
67], aiming at the problem that the existing target detection methods under sea clutter suppression are not applicable to non-coherent marine radars, this paper proposes a sea clutter suppression and target detection algorithm of marine radar image sequence based on spatio-temporal domain joint filtering. In this method, firstly, sea clutter energy in the image sequence is filtered by using the spatio-temporal domain joint sea clutter suppressor. Then, a detector is used to detect the target in the processed image sequence. This method is a new algorithm that can effectively suppress sea clutter signal by using the amplitude information of radar signal and complete high accuracy target detection.
The remainder of this paper is organized as follows.
Section 2 analyzes and establishes a theoretical model of sea clutter in the marine radar image sequence. In
Section 3, it introduces the algorithm process proposed in this paper. The performance of the proposed algorithm is demonstrated by using real X-band marine radar data in
Section 4. Finally, the conclusions are presented in
Section 5.
2. Sea Clutter Model of Marine Radar Image Sequence
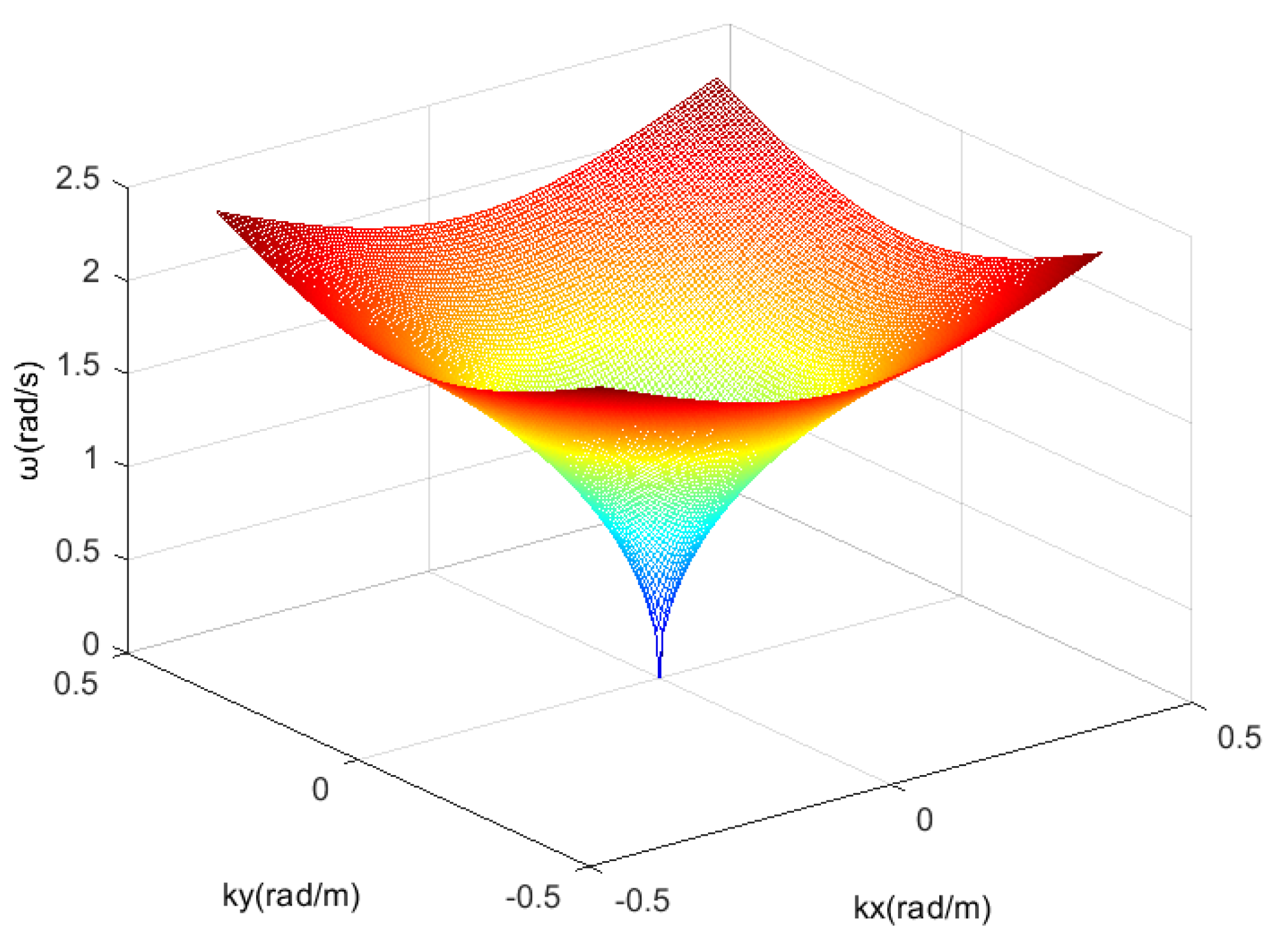
In hydrodynamics, the linear wave theory linearise representations of gravity wave propagation on uniform fluid layer surface. The theory that describes the dynamics and kinematics of wave is frequently used to estimate the characteristics of waves. LeBlond and Mysak found in the study of hydrodynamic characteristics of wave that the gravity wave of sea wave conformed to the dispersion relationship in the linear wave theory. LeBlond et al. assumed that the wave field and current field on the sea surface are spatially uniform and temporally stable in the selected region, and the first-order gravity wave of the sea wave satisfies the following dispersion relationship [
65,
66,
67]:
where
is the frequency of sea gravity wave,
g is the gravity acceleration,
h is the water depth and
k is the modulu of wave number.
The premise of the relationship in Equation (
1) is that the velocity of the sea surface current is zero. The existence of sea surface current will cause a Doppler frequency shift. Meanwhile, the current
will keep the wave number
k unchanged and offset the original
, which will influence the image spectrum. Influenced by Doppler frequency shift effect, the image spectrum of the wave for which its propagation direction is consistent with the current direction migrates to a relatively higher frequency position. Correspondingly, the image spectrum of the wave for which its propagation direction deviates from the current direction migrates to a relatively lower frequency position. Therefore, considering the influence of sea surface current in Equation (
1), Equation (
2) is obtained.
Figure 1 shows the dispersion relation curved surface when the current velocity is 0 m/s.
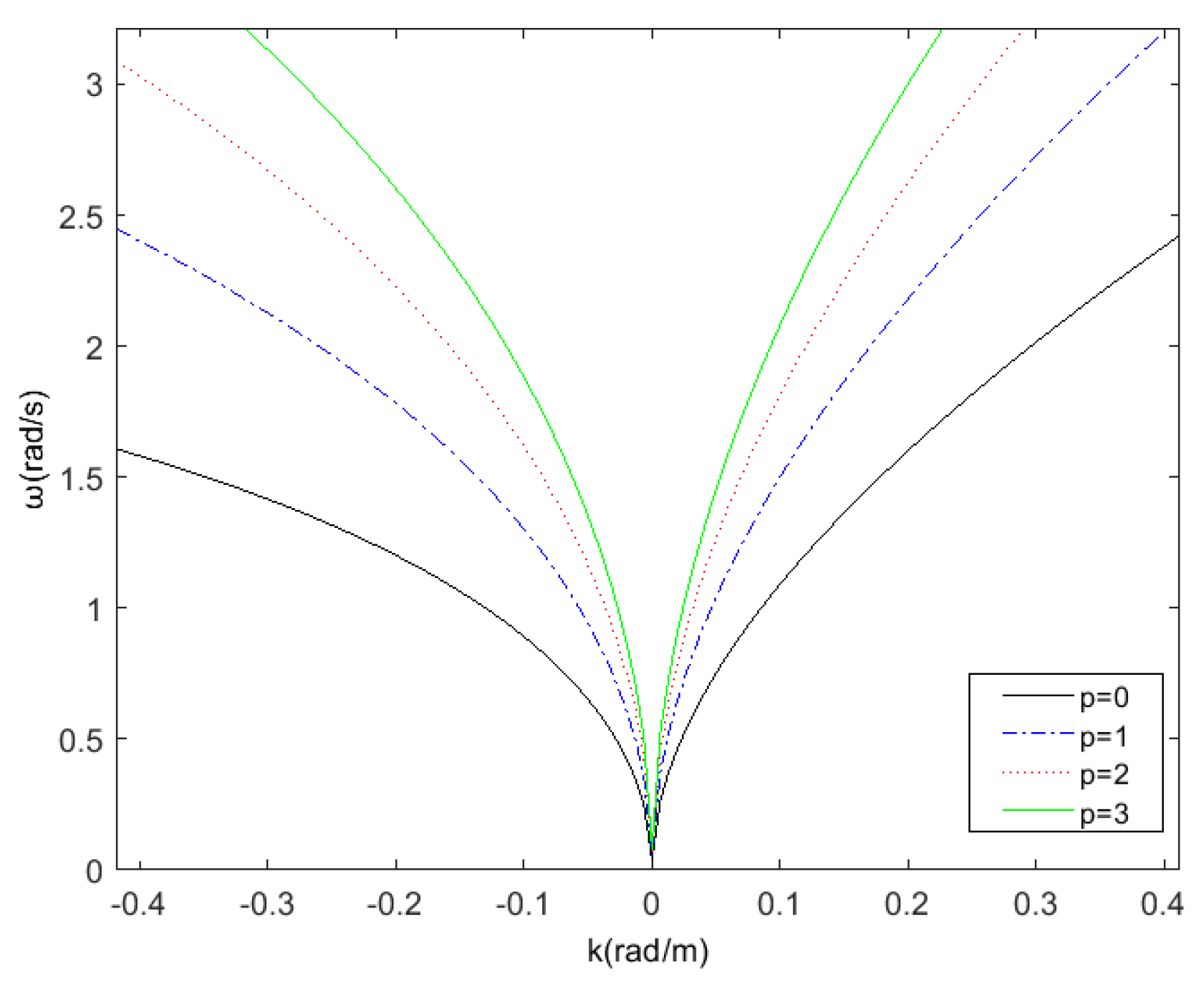
Except for the basic dispersion relation satisfied by the first order gravity wave, there are higher-order dispersion relations defined as follows:
where,
, when
p is 0, Equation (
3) is consistent with the Equation (
2). At this moment, the dispersion relation is linear dispersion relation, and the corresponding Equation (
2) is the basic dispersion relation equation. When
p is not 0, the dispersion relation is nonlinear, and Equation (
3) is the corresponding p-order dispersion relation equation.
Figure 2 shows the dispersion relation curves of different order when the current velocity is 1 m/s; at this moment in time, the set current direction is the same as the positive wave direction. It can be observed from
Figure 2 that the higher the order of the dispersion relation, the greater the frequency of the corresponding curve at the same wave number.
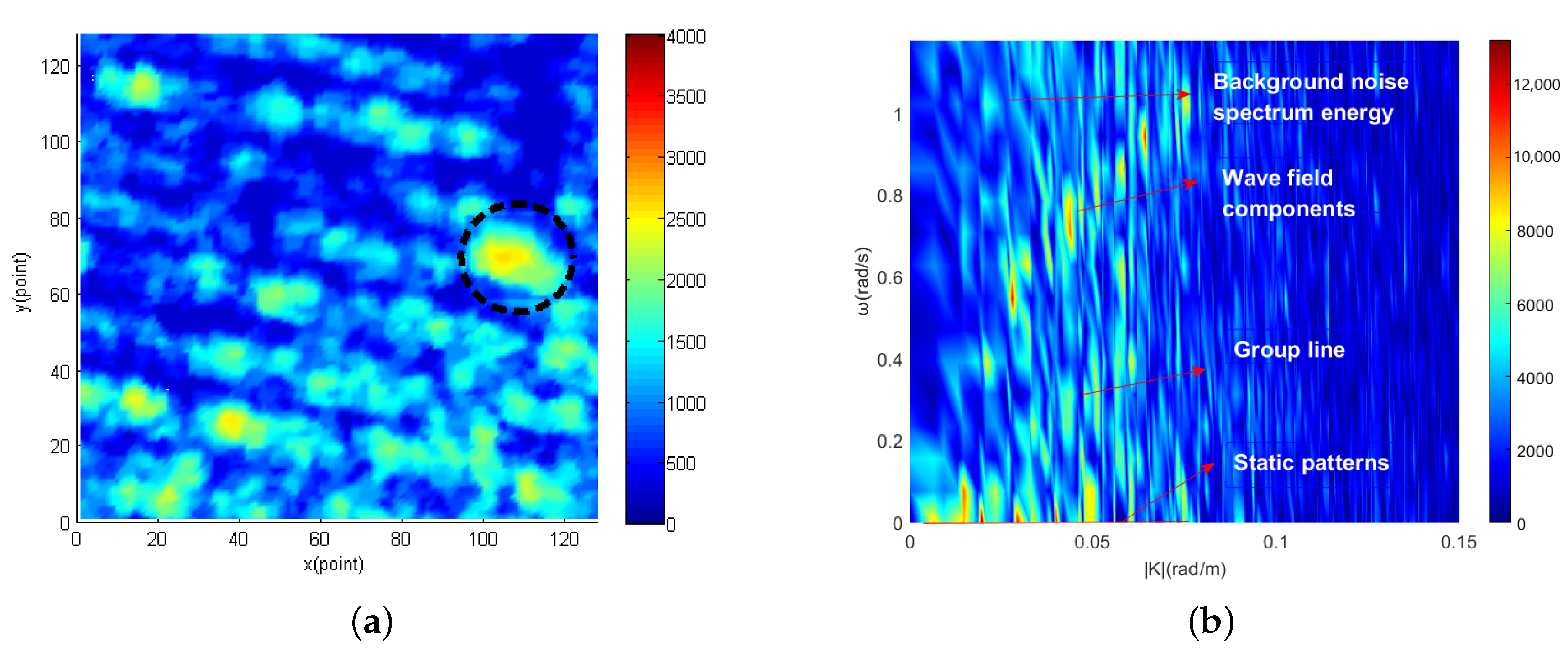
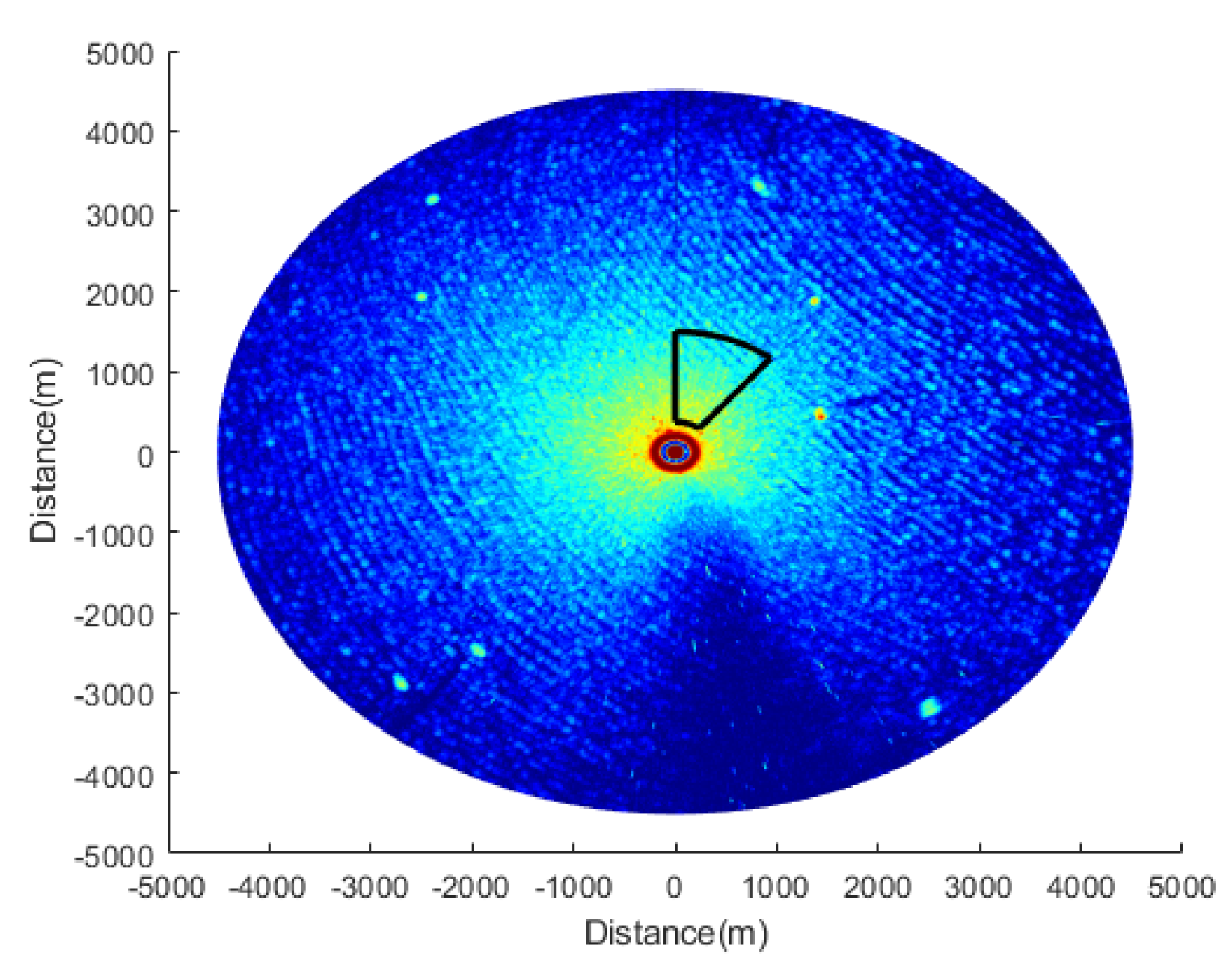
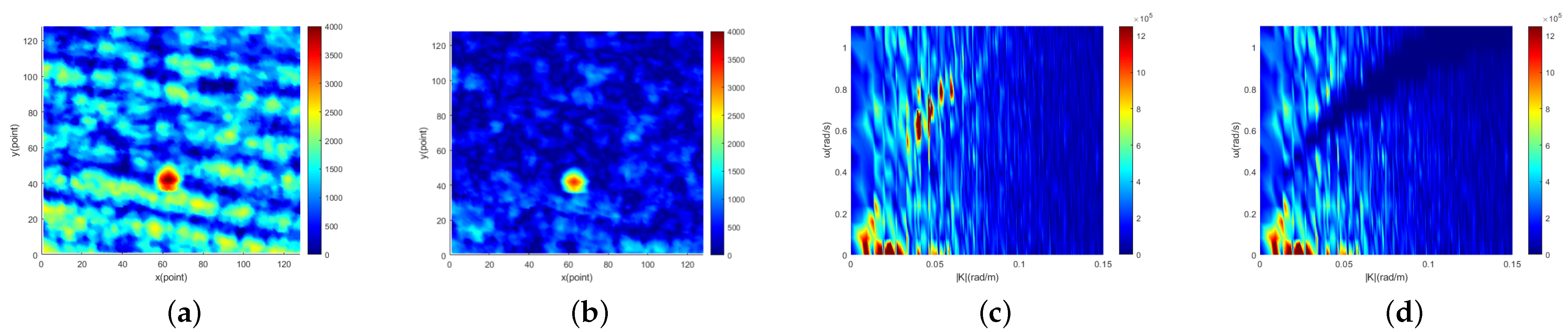
Radar image containing target obtained from the East China Sea are shown in
Figure 3a. The part within the black circle in the image is target. The 2D cross section of the three-dimensional image spectral domain along the |
| direction obtained from
Figure 3a is shown in
Figure 3b. It can be seen from
Figure 3b that the image spectrum is composed of different kinds of spectrum. The first kind is the sea clutter spectrum, which mainly concentrates near the basic dispersion relation [
65]. The second kind is the background noise spectrum caused by sea surface roughness [
68]. The third kind is static and quasi-static signal spectrum. Since the electromagnetic wave will fade when it propagates in the air, the energy will attenuate in the radial distance. Static and quasi-static spectrum are generated in this process and mainly concentrated in the extremely low frequency region of the image spectrum [
69]. The fourth kind is the nonlinear wave characteristic spectrum, which is the group line generated by second-order interactions between two different components [
70]. The fifth kind is target spectrum scattered in the image spectrum. For moving target, the target spectrum is related to the size and the gray value of the target itself. On the other hand, the spectrum of moving target is not only related to size and gray value but also related to motion speed and motion mode.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}