1. Introduction
Coupled harmonic oscillators are key models in physics as they describe many different systems near equilibrium. In particular, they play a fundamental role in several quantum technologies such as simulation, communication, and information processing [
1,
2,
3,
4,
5,
6]. Inverse engineering the dynamics of two coupled oscillators is thus a basic and important operation for controlling quantum systems. In a previous publication [
7] we demonstrated that when the coupling is proportional to the product of oscillator coordinates
, it is possible to inverse engineer the time dependence of the quadratic potential using a combination of invariants to swap the quantum numbers of any eigenstate of the initial uncoupled oscillators. The process may be faster than the adiabatic one and it is not state-specific, in other words, the initial quantum numbers need not be known. In more detail, we identified first a “family” of driving processes based on a quadratic invariant found by Simsek and Mintert [
8,
9,
10]. This invariant is degenerate except for the ground state, so the processes in this family do not guarantee swapping in general. To remedy the “degeneracy problem” we complemented the quadratic invariant with linear invariants and found an explicit expression for the final states, which may become the desired swapped states by adjusting the value of a single control parameter (once and for all for a predetermined process time, i.e., for arbitrary quantum numbers). The adjustment was done with very little numerical effort by running classical trajectories until a boundary condition is met.
The specific application we worked out in ref. [
7] was the swapping of quantum numbers describing a single particle state in a two-dimensional harmonic trap whose final configuration is rotated by
with respect to the initial configuration (The intermediate driving though is not a pure trap rotation since the eigenfrequencies are also deformed along the process). Up to a phase factor, which may be manipulated, the final state was a replica, rotated by
, of the initial eigenstate. On a rotating basis, the protocol in [
7] facilitates a one-to-one mapping between initial and final eigenstates keeping at the final time the same quantum numbers set initially. In other words, the “swapping” results from defining the quantum numbers instead in non-rotating bases for the initial and final oscillators in
x and
y directions, which were the principal axes directions of the initial and final trap configurations. We shall generalize these results to allow for more general trap manipulations in 2D including arbitrary rotations and displacements. These extensions provide a theoretical background for shuttling operations in 2D networks using trapped ions in multisegmented Paul traps [
11] or neutral atoms driven by optical tweezers [
12], but we shall leave aside, except for some comments in the final discussion, implementation issues, which should be studied separately and vary largely with the setting and system. The first generalization considered here is to allow for rotations by an arbitrary final angle
(in the examples we use
). The particular, the
angle treated in [
7] is somewhat simpler, because the directions of the initial and final principal axes coincide, and ref. [
7] only hinted at how to deal with other angles. Moreover, ref. [
7] made use of a restricted subset of the Hamiltonians allowed in ref. [
8], whereas in this paper we shall make use of the whole set to combine trap rotations and displacements of the eigenstates of the initially uncoupled oscillator map, one to one, with the final eigenstates of the final oscillators.
The work in ref. [
7], allowing for a fast, controlled rotation of the final trap with respect to the initial trap, together with known shortcut-to-adiabaticity (STA) [
13] protocols for 1D displacements and trap expansions or compressions, form in principle a complete toolbox of elementary motional drivings in 2D. These elementary processes could drive sequentially (i.e. by means of a succession of translations and a rotation) an arbitrary 2D trap on a plane to any other trap (with different locations, orientations, and eigenfrequencies), implementing a one-to-one mapping from initial to final eigenstates. However, sequential processes may be outperformed by combined ones in which the different operations are done simultaneously [
14], for example, to turn a corner. We shall design such combined protocols here.
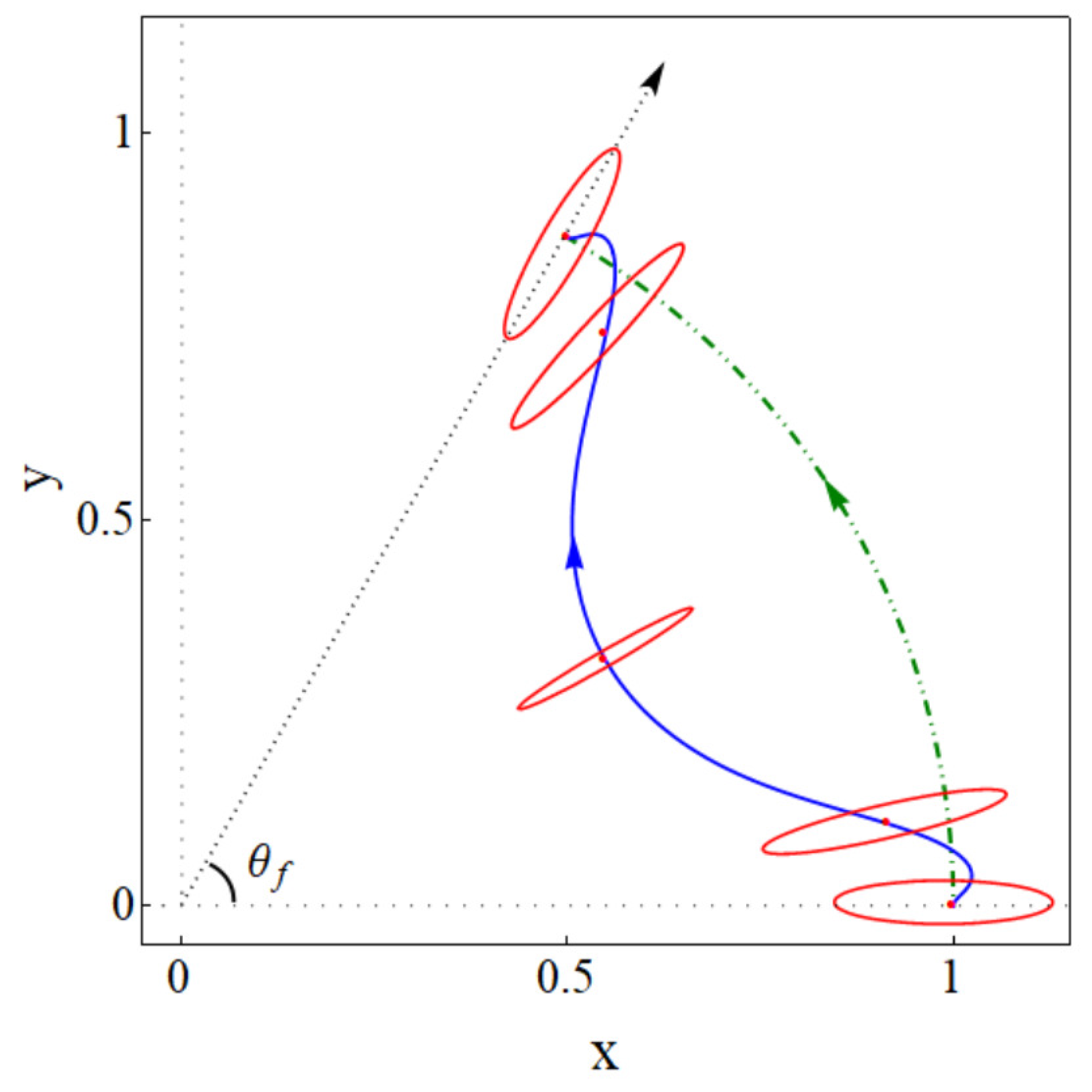
Figure 1 depicts an example of a designed state trajectory as well as the inverse engineered trap trajectory found in this work to drive that desired state evolution. We also depict schematic snapshots (ellipses) of the evolution of the trap at equal time intervals.
A clarification on notation and terminology: “trap rotation” is understood here as a rotation of the principal axes of the trap with respect to fixed directions in the laboratory frame (the rotation may occur simultaneously with deformations of the principal frequencies and translations). The rotation is characterized by an angle
that is also used to define rotating coordinates
parallel to the principal axes but having the same origin as the
axes, see
Figure 2. We also define a polar angle for the center of the trap
in the
lab frame, see
Figure 2. These two angles are, in general, different, but in numerical examples below and in
Figure 1, they are made equal at initial and final times,
. This coincidence at boundary times is a natural choice for possible applications but it is not a necessary condition for the applicability of the inverse method worked out in the following.
The paper is organized as follows: in
Section 2, we describe the two-dimensional invariant adapted from Simsek et al. [
8]; in
Section 3, we set the model and notation;
Section 4 gives the ansatzes for inverse engineering, and in
Section 5 the degeneracy of the invariant is discussed; in
Section 6, auxiliary linear invariants are introduced to solve the degeneracy problem. The article ends with a discussion and technical appendices.
2. A Quadratic Invariant for Two-Dimensional Harmonic Traps
Simsek and Mintert [
8] consider Hermitian Hamiltonians with a
matrix form
where
, with
and
being conjugate momenta for
x and
y,
represents a
unit matrix, and the superscript
T means the transpose of the matrix. The formal treatment is dimensionless here (see a discussion of the dimensionless units in ref. [
7]) so that no mass or
ℏ appear explicitly in any equation. As a reminder, the unit of (angular) frequency is one of the initial eigenfrequencies of the trap, and the unit of time its inverse. The potential has a quadratic part with real coefficients in the time-dependent
symmetric matrix
M, and a linear part characterized by the force vector
F,
Here
M determines the eigenfrequencies and orientation of the “trap”, which may be as well a saddle, or an antitrap if one or two eigenfrequencies become imaginary (When we refer to a “trap” from now on, these possibilities—a saddle or an antitrap—should also be included), whereas
F determines its displacement from the origin (The exact displacement is in Equation (
19) below). Simsek and Mintert find quadratic invariants compatible with this Hamiltonian of the form [
8]
where
(
is the covariance matrix of the Gaussian ground state of the invariant) is given by
and the dots represent time derivatives.
W and
are given by
where
R is a real, Hermitian, positive semidefinite
matrix, and
L is a real vector, satisfying
with
A and
determined from
Here
and
is the anti-commutator.
Equation (
6) is a generalized (matrix) Ermakov equation. When inverse-engineering the Hamiltonian, the designed
R determines the form of the quadratic part
M.
is physically the spatial correlation matrix for the Gaussian ground state of the invariant. In the (slow) adiabatic limit,
. Equation (7) has the form of a vector Newton equation.
L gives the trajectory of the center of the ground state of the invariant [
8]. Using this equation inversely, the designed (state) trajectory
L together with
M will determine the homogeneous two-component force
F.
R and
L are designed by setting their boundary conditions and interpolating between them. Analogously to one dimensional (1D) configurations [
15,
16], the boundary conditions are chosen so that
which implies
with
being the boundary times.
6. Linear Invariants
To solve the degeneracy problem and get a more explicit expression for the final state, we need to introduce more invariants. The linear operators [
17,
18,
19]
are invariants for the Hamiltonian (
12) provided
In a “direct problem” (where M and F are given) the functions are classical trajectories that depend on the quadratic part M, and f may be found from them and the forces. Note that may be complex, with real and imaginary parts representing independent trajectories.
The linear invariant can be written in terms of the rotation coordinates and momenta as
where
Defining annihilation operators
,
, with
,
, the linear invariant can be expressed in terms of creation and annihilation operators, in particular, at boundary times
Different linear invariants may be constructed by choosing specific boundary conditions for
and
. In particular, the initial conditions [
19]
define an invariant which is initially
.
Instead, the initial conditions (the prime distinguishes them from the ones in Equation (
35))
define a different invariant which at time zero is
.
Now we may construct corresponding quadratic invariants to form initial number operators. In fact,
. From Equation (
28), the corresponding final invariant is
, which means the “final” linear invariants
and
have no independent terms, or terms that depend only on
or
. A consequence is, see
Appendix A, that the linear invariants at
are given by combinations of the form
where, using Equation (
34),
The coefficients satisfy the following relations, see Equation (
A3),
Considering the normalization condition at the final time, we also have the additional relations [
7]
Finally, combining Equations (
38) and (
39), we have
It is useful to define
since the zeros of
b, which can be found for special
and
values, see some examples in
Table 1, achieve a remarkable simplification, namely,
where the non-zero coefficients have unit modulus, according to Equation (
40), and the phases are found from the final conditions of the trajectories, see Equation (
38). These special values of
and
are found here by running classical trajectories in the inertial
lab frame. The initial conditions are found from Equation (
35). Fixing
and sweeping on
values,
is calculated for a given
pair from the final conditions using Equation (
38). (Alternatively Equation (
36) could also be used for the initial conditions with
b computed as
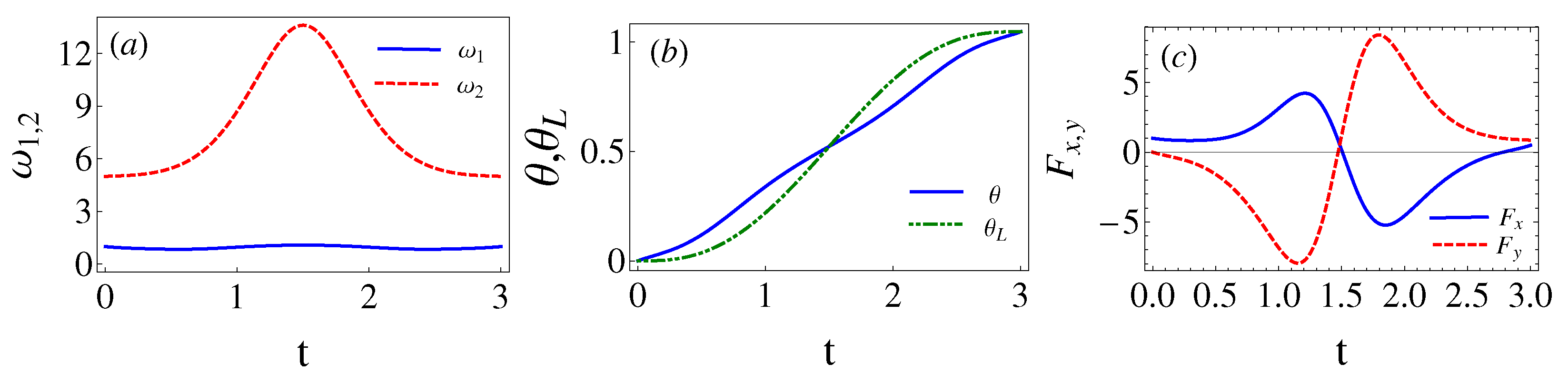
from the final conditions.) In
Figure 3, corresponding to
Figure 1, the eigenfrequency
, the coordinate rotation angle
, the polar angle for the center of the trap
, and the force
are plotted for the parameters
,
, and
, which make
. As shown in
Figure 4, for a chosen
there may be several
that make
or extremely small (say
). In general, we pick up the smallest
as larger values imply tighter traps [
7].
may be as well optimized by looking for the smallest
b values found this way, for example, see
Table 1. The search could be done using different optimization subroutines but we are only interested in a proof of principle here. Note also in
Figure 4 that
b flattens for larger and larger times, indeed, for very large
(
or larger for the parameters in the examples) the process becomes adiabatic and
for any
.
Since the ground state of the invariant is not degenerate, the initial state
will lead to
up to a phase factor. In a given basis the final state that dynamically evolves from
will generally be affected by a Lewis–Riesenfeld phase, i.e., it will be
with a
that depends on the specific transient protocol,
, where
is the instantaneous ground state of the invariant
. For a given protocol this turns out to be a “global phase” common to all states, see Equation (
45) below, so we may ignore it, as in [
7], which amounts to redefining the final state basis absorbing the common phase. Such a phase would be relevant though in interferometric processes with different time-dependent protocols applied to the wavefunction branches [
20,
21]. An arbitrary initial eigenstate of
may be written from the ground state as
, where
where we have used the boundary conditions (
35) and (
36) of the auxiliary trajectories to define
and
. An invariant
is constructed with
and
using the corresponding trajectories. An invariant acting on a solution of the Schrödinger equation is also a solution. In particular
will evolve dynamically to
,
For the special parameters
and
such that
,
, and
while the other coefficients vanish,
. Thus, Equation (
45) can be simplified as
which realizes a one-to-one mapping. These special parameters
and
can be found in
Table 1 and
Figure 4.
Finally, let us summarize the steps to design the protocol in practice: Boundary conditions at initial and final times
are set first for the quadratic and linear parts of the potential,
, and
. The auxiliary functions
and
are interpolated according to expressions in Equations (
22) and (
23), see their physical meaning below Equation (
8). Using the form of
in Equation (
22),
in Equation (
6) can be solved with two unknown parameters
and
. For given
and
, the system Equation (
30) can be solved with the initial conditions in Equations (
35) and (
36), and the coefficients
,
are found from Equation (
38). The final state for some initial eigenstate of the Hamiltonian is given in Equation (
45) in terms of these coefficients. To go from
to
up to a phase, avoiding the degeneracy problem,
must be satisfied, see Equation (
42), so that
and
cannot be arbitrary. They can be chosen with different optimization subroutines, in particular, we choose to minimize
b and
, to avoid traps that are too tight. Once
and
are fixed so that
, the time-dependent potential that defines the protocol is defined by the quadratic part
, and by the linear part
, which is found using Equation (
7).
7. Conclusions and Discussion
In this paper, we have designed time-dependent driving protocols to map the eigenstates of an initial harmonic trap into corresponding eigenstates of a final trap, which is translated and rotated with respect to the initial one. The processing time for the one-to-one mapping can be chosen beforehand, in particular, the process may be faster than the adiabatic one, and the eigenstates whose combination form the initial state need not be known, in other words, the protocol is initial-state independent. Quadratic and linear invariants are used for inverse engineering the driving harmonic potential. The linear ones are needed to solve the “degeneracy problem” posed by the quadratic invariant proposed in [
8].
Physical realizations may be performed for neutral atoms with optical traps or trapped ions with 2D Paul traps. Shorter times may imply larger and possibly imaginary potential eigenfrequencies, as well as trap trajectories that exceed a given spatial domain, see as an illustration of this point trap-center trajectories found for
,
, and
in
Figure 5. Note, in particular, that shorter times imply larger deviations of the wavepacket trajectory (green-line arch) with respect to the trap trajectory (rest of lines) and, therefore, larger potential energies. These aspects set in practice the limits for the applicability of the approach, which will depend on each specific setting and its technical constraints regarding allowed spatial domains, frequencies, energies, and time resolutions.
While our method uses invariant-based inverse engineering, this is just one among other shortcut-to-adiabaticity approaches [
16] that may be worth exploring, for example, transitionless quantum driving [
22], fast-forward approach [
23], or time-rescaling methods [
24,
25]. We also note that trap rotations of charged particles have been studied with shortcut methods [
26,
27,
28]. However, the present approach is also applicable to neutral particles. There are also many examples that show the usefulness of combining STA with optimal control theory [
16]. Such a combined approach would be interesting in particular to find optimal
and
parameters.
Finally, note that the Hamiltonian forms used are also valid for other systems such as two coupled oscillators on a line, coupled superconducting qubits [
29,
30,
31,
32,
33], and optomechanical oscillators [
34,
35,
36].










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}