
Design of Nonlinear Autoregressive Exogenous Model Based Intelligence Computing for Efficient State Estimation of Underwater Passive Target




Abstract
1. Introduction
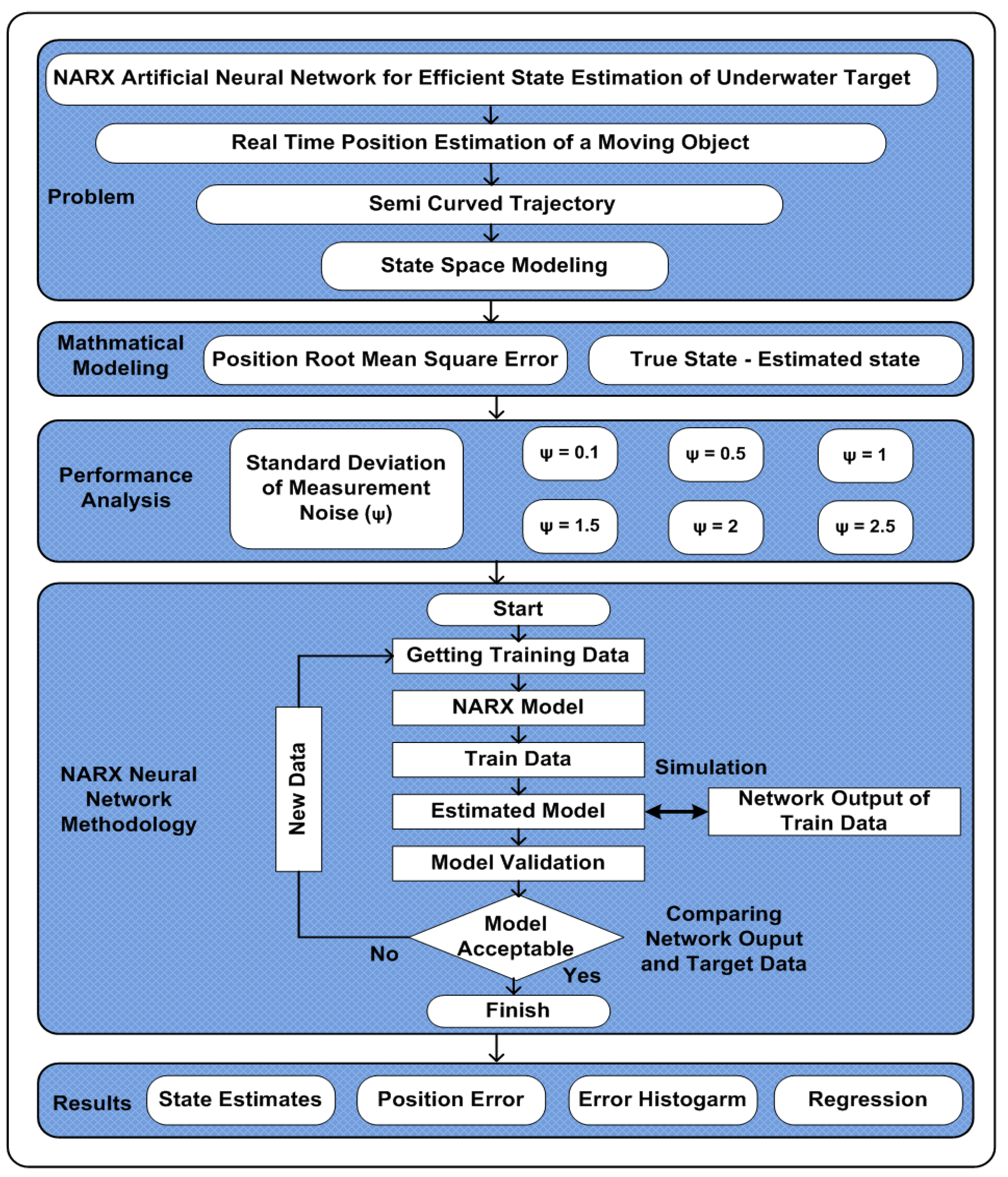
- A performance based intelligent computing is presented for the accurate location estimation of a passive underwater target by manipulating the capability of NARX based neural network.
- Wiener Velocity Motion (WVM) model is exploited for designing the dynamics of target in semi-curved trajectory with the parameter of standard deviation of measurement noise.
- State estimates and position error for passive target prove the worth of proposed intelligent computing over conventional nonlinear variants of KF based on SRCKF and UKF.
- The performance is further endorsed through minimum RMSE criterion in terms of accuracy and better convergence rate than conventional nonlinear KFs.
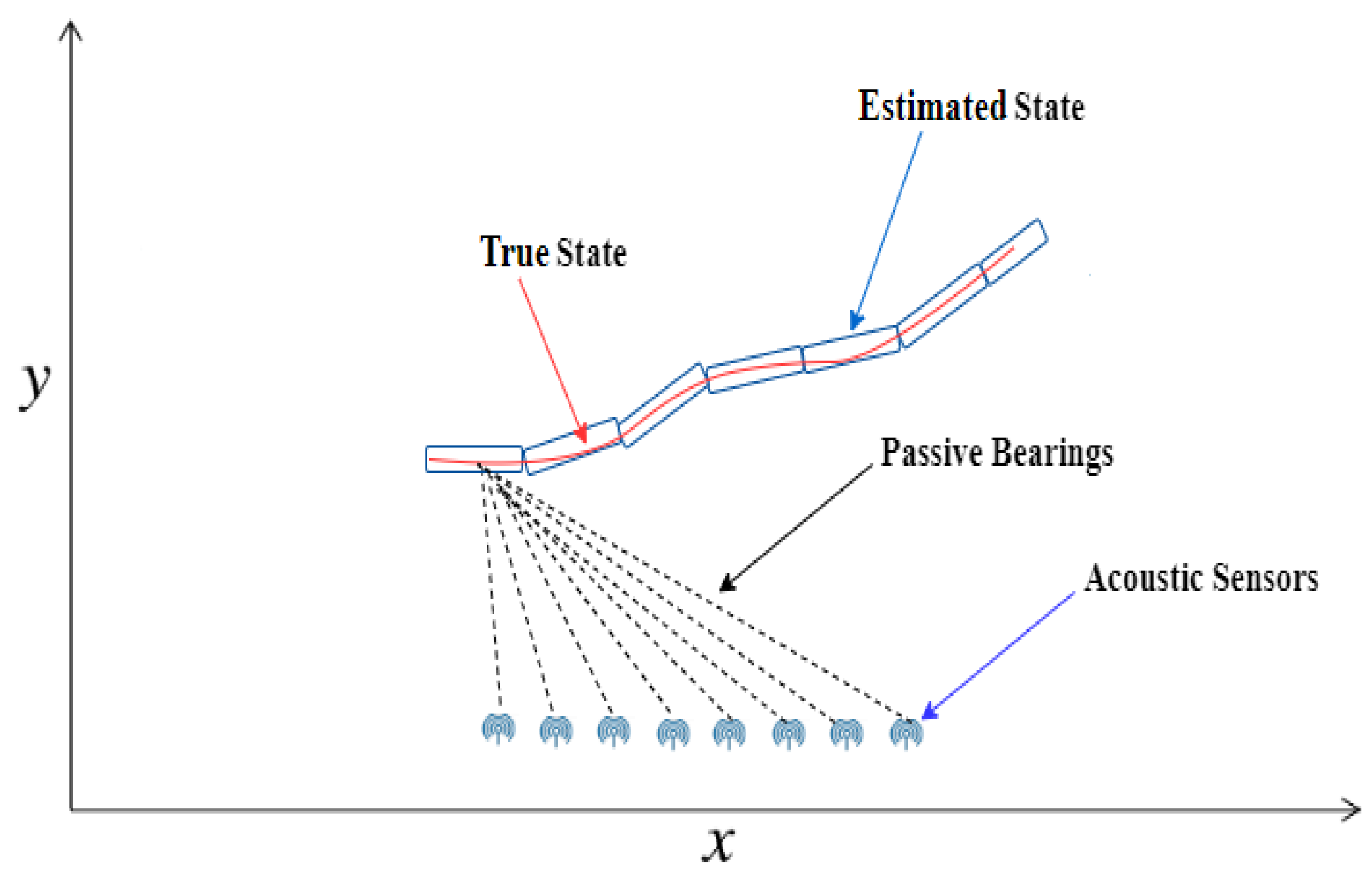
2. Passive State Estimation System Model
2.1. Dynamic Model
2.2. Measurement Model
3. Artificial Neural Network (ANN) Modeling
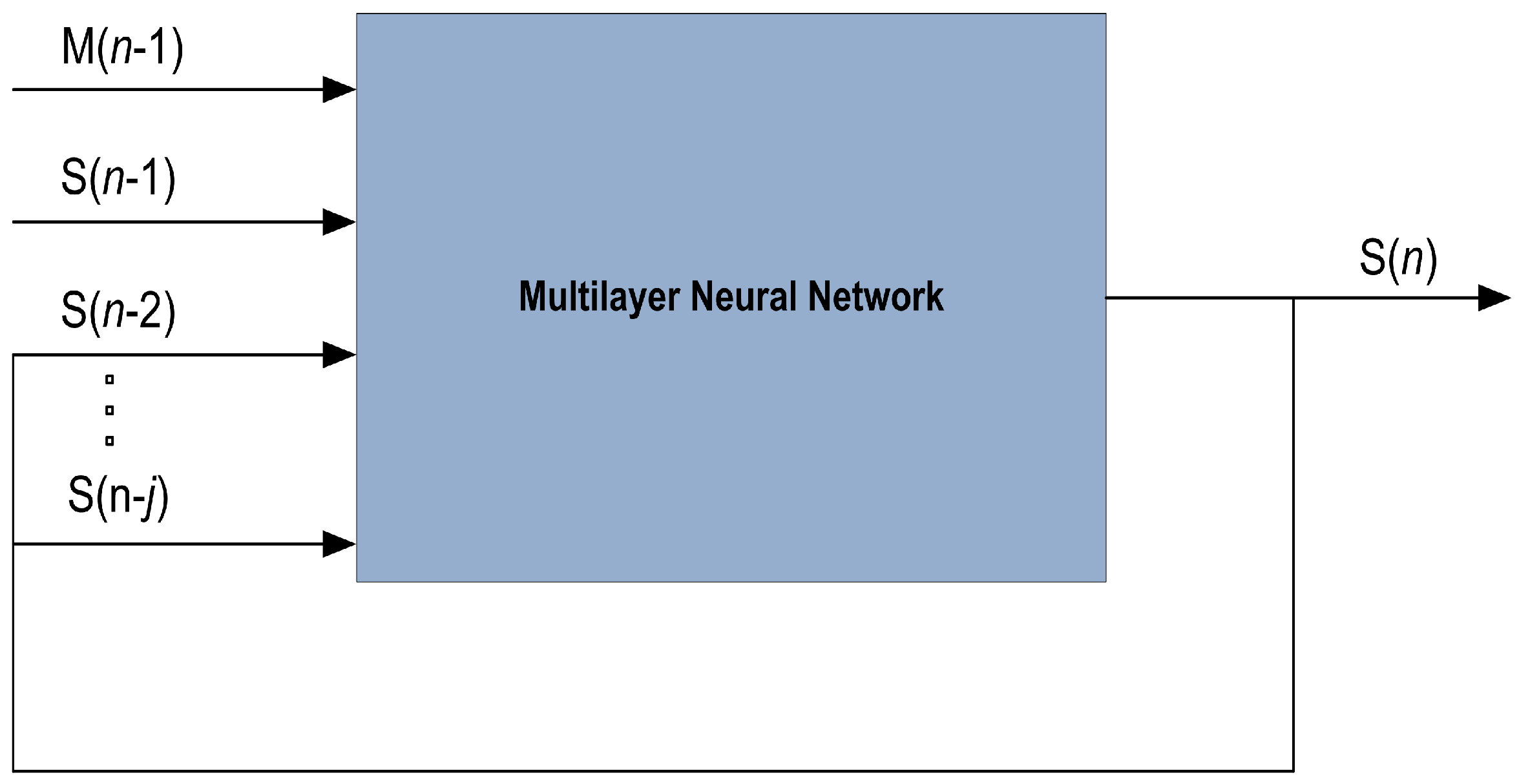
3.1. Nonlinear Autoregressive with Exogenous Input (NARX) Model
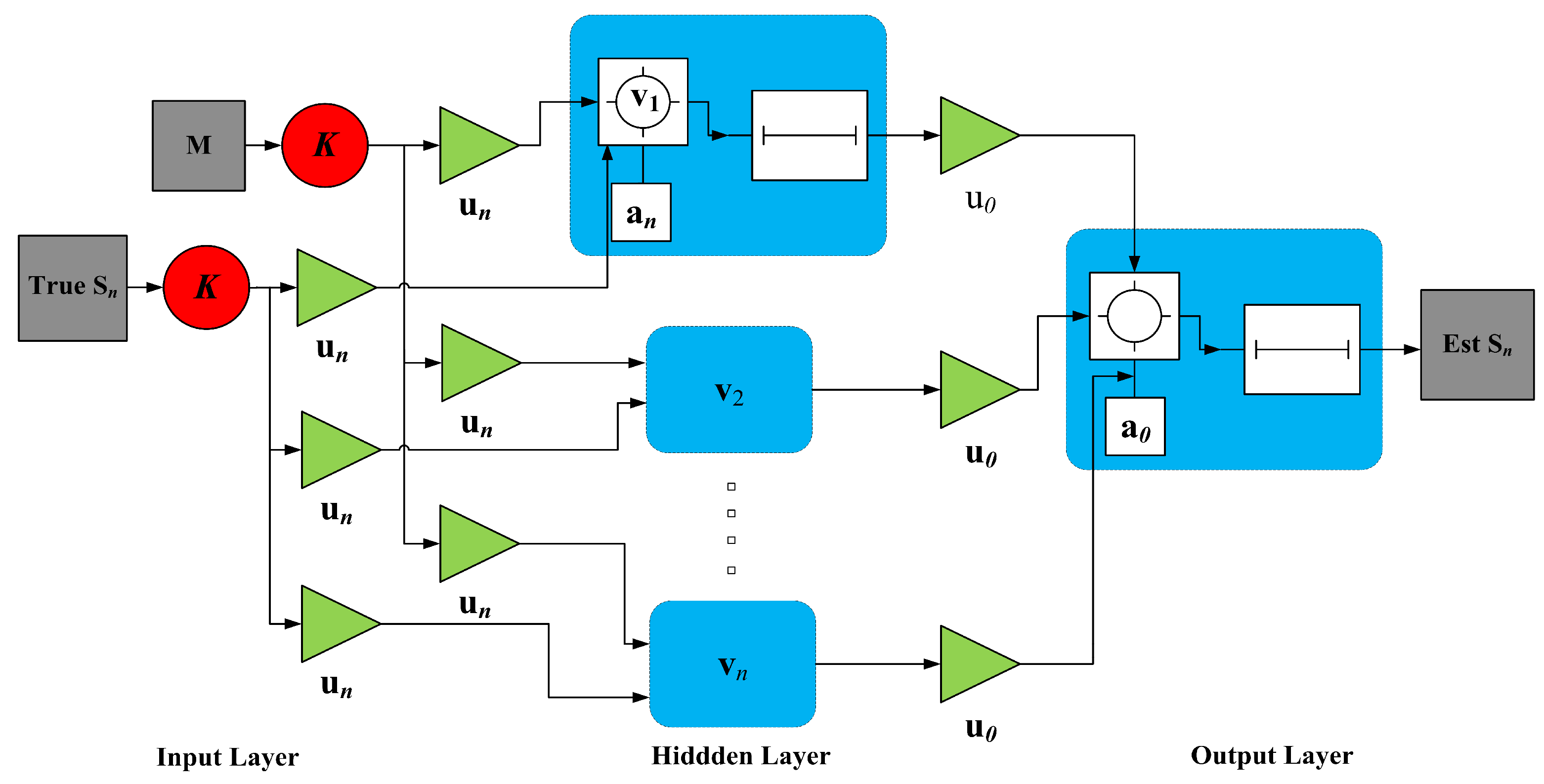
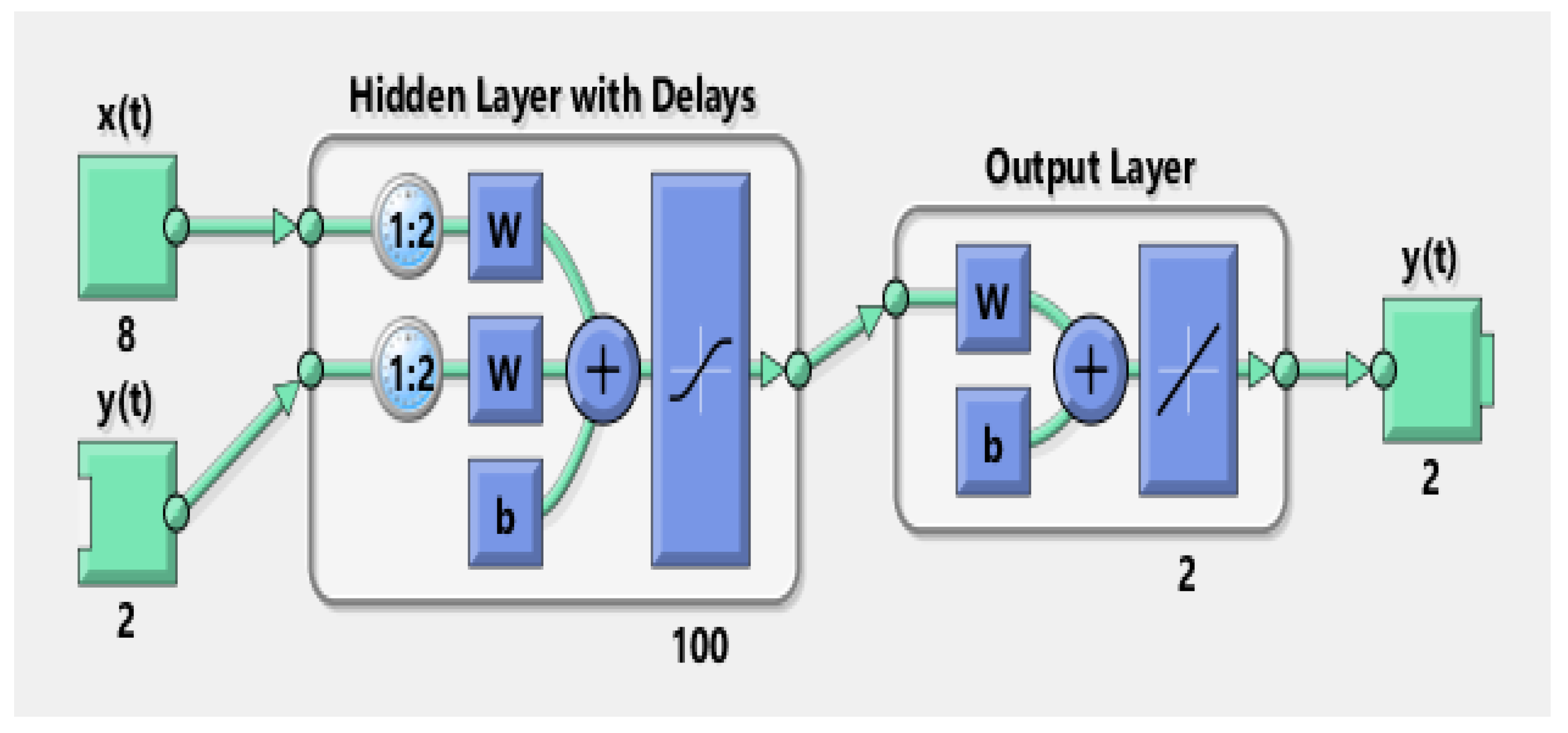
3.2. NARX Neural Network Architecture
3.3. Levenberg–Marquardt (LM) Training Method
3.4. Performance Evaluation Criterion
4. Simulation Results and Discussion
4.1. State Prediction of Passive Target by Varying Standard Deviation of Measurement Noise
4.1.1. Scenario 1: Measurement Noise = 0.1 Radian
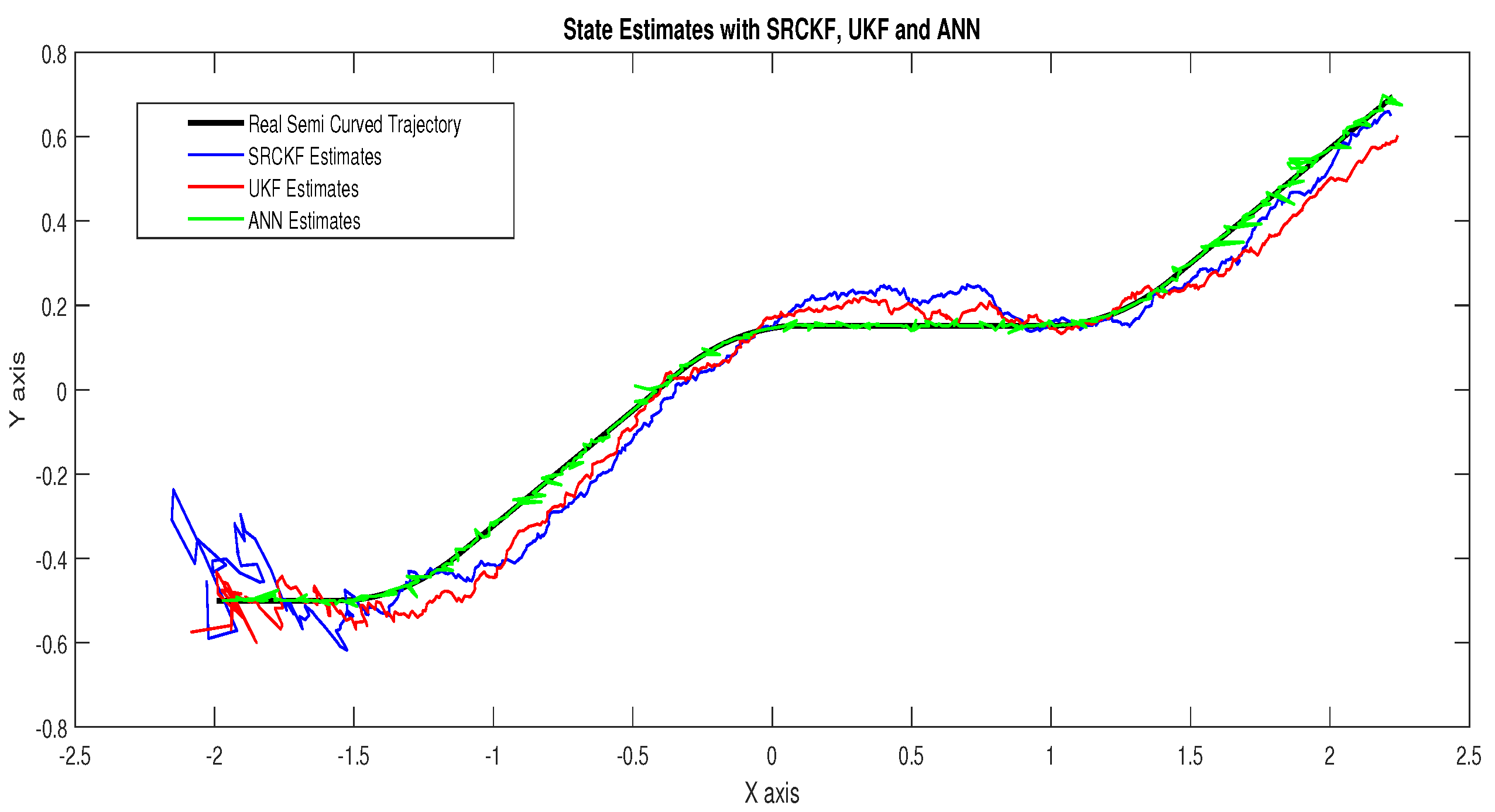
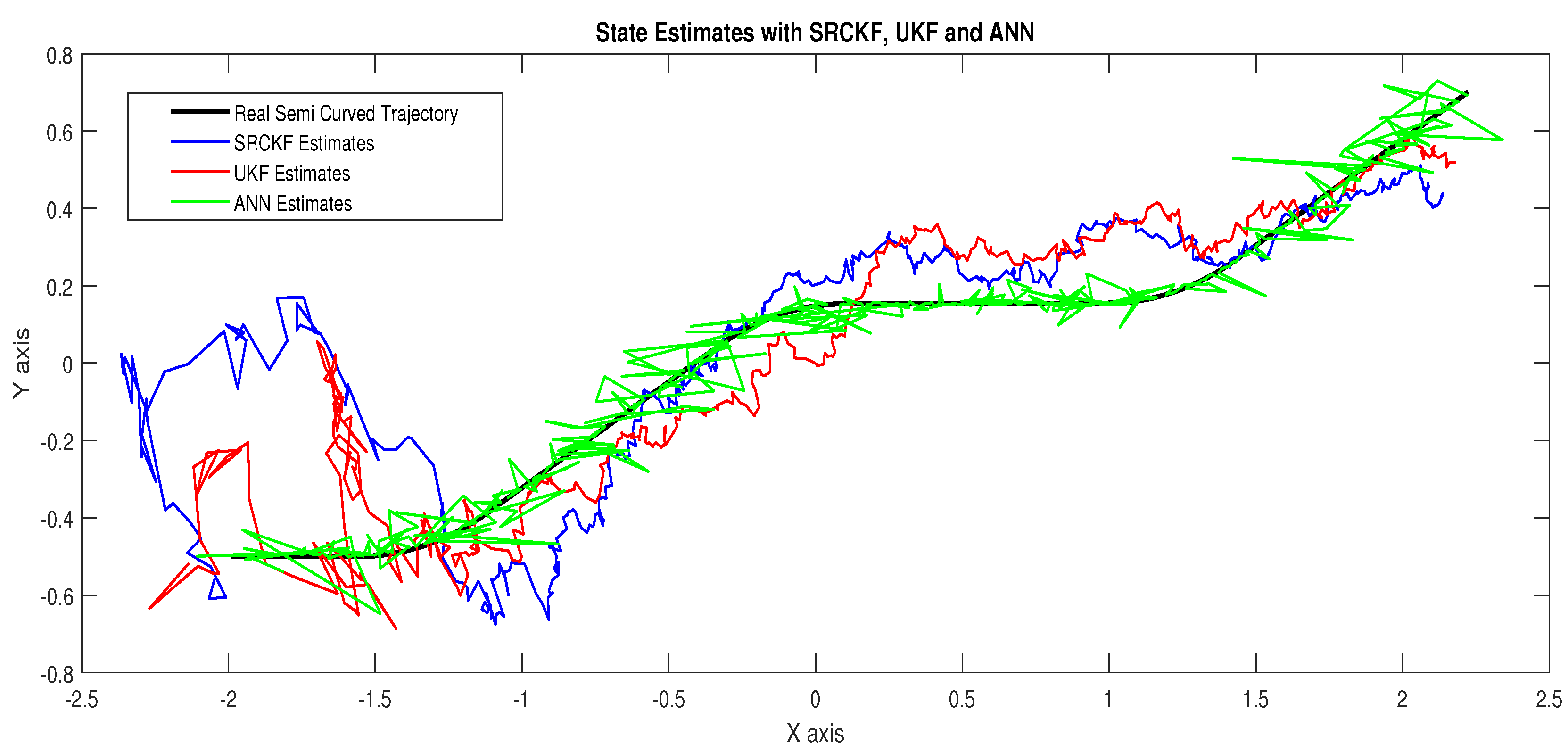
- In Figure 6 state estimates of ANN are compared with other two conventional filtering techniques and it is clear that ANN is exactly following the true trajectory of the dynamic object with respect to other techniques.
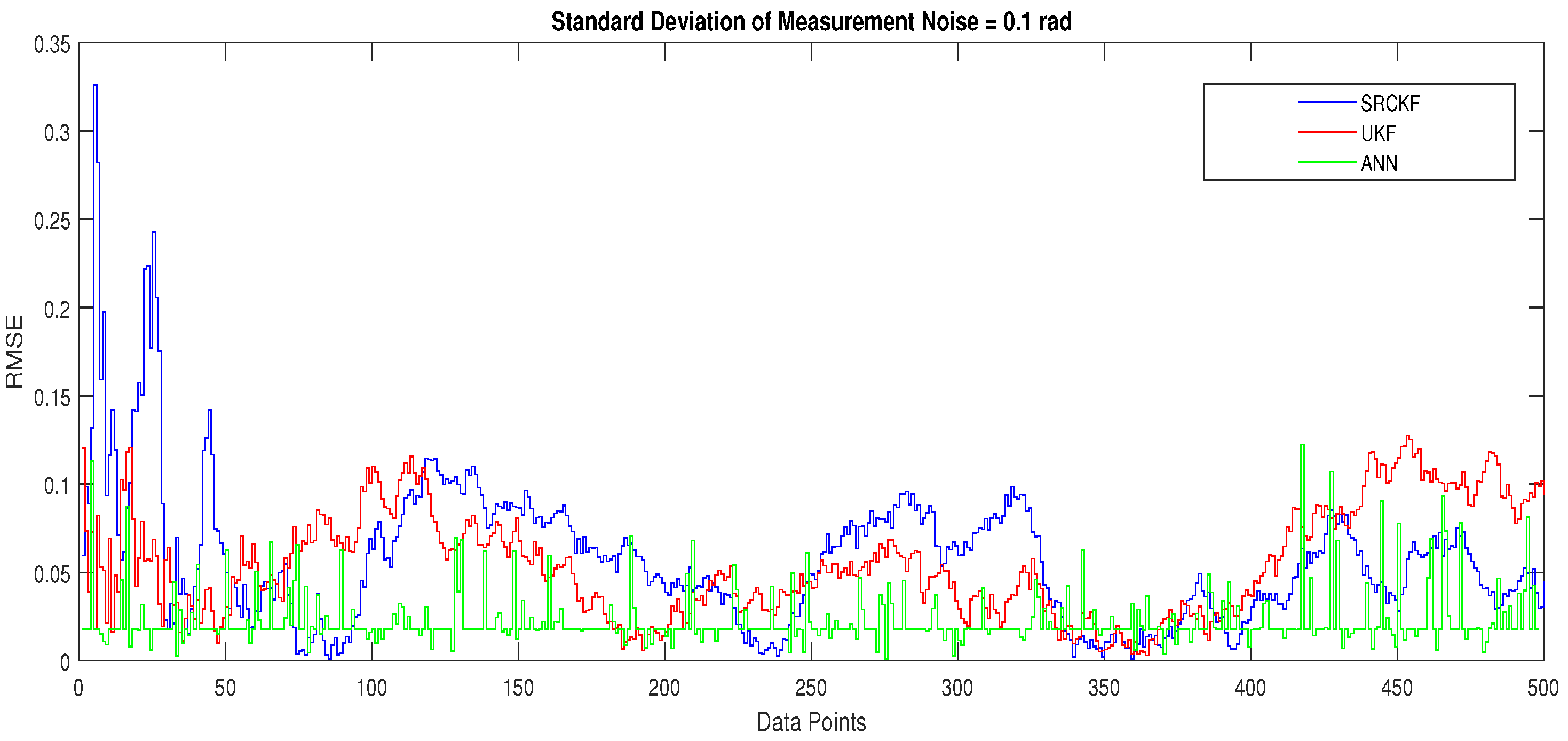
- In Figure 7 RMSE between true and estimated position of dynamic object is represented which is clearly showing that ANN is performing far better from conventional filtering algorithms of SRCKF and UKF.
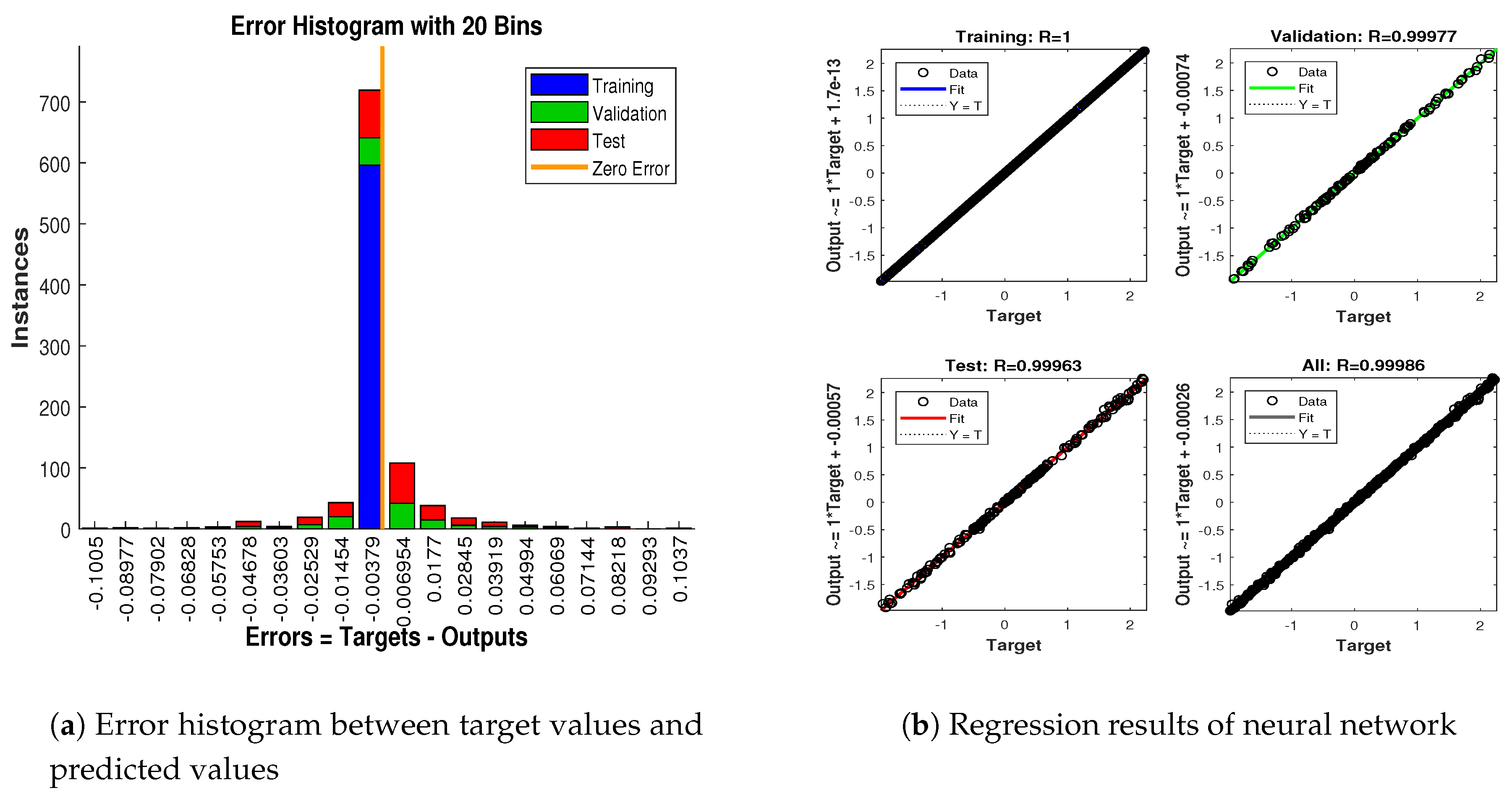
- In Figure 8a, the error histogram is shown between target values and the estimated value of target’s position after training feedback ANN. As these error values indicate how predicted values differ from the target value and it can be negative. The total error of neural network is distributed in 20 smaller vertical bars in the graph of Figure 8a, which are called bins. In a specific bin, the number of data points from the total data set are shown on the Y-axis. IN the middle of the plot, a bin corresponding to the error of −0.00379 and the height of that bin for training data set lies near to 700 while validation and test data set lie between 600 and 700. This means that many samples from different data sets have an error lies in that following range. The zero error line corresponds to the zero-error value on the error axis (i.e., X-axis). In this case, the zero error point falls under the bin with center −0.00379.
- In Figure 8b, the regression results of the ANN scheme are presented for the training, validation and testing process. The overall data set is divided into these three with a ratio of 75%, 15% and 15% correspondingly. Neural network analysis of regression is actually a combination of statistical procedures for predicting correspondence among single output variable and target variable . In the regression results, it can be seen that the actual target and predicted output are overlapping each other. An almost linear behavior among target and output values is observed, which is clear evidence for the effectiveness of the proposed NARX model.
4.1.2. Scenario 2: Measurement Noise = 0.5 Radian
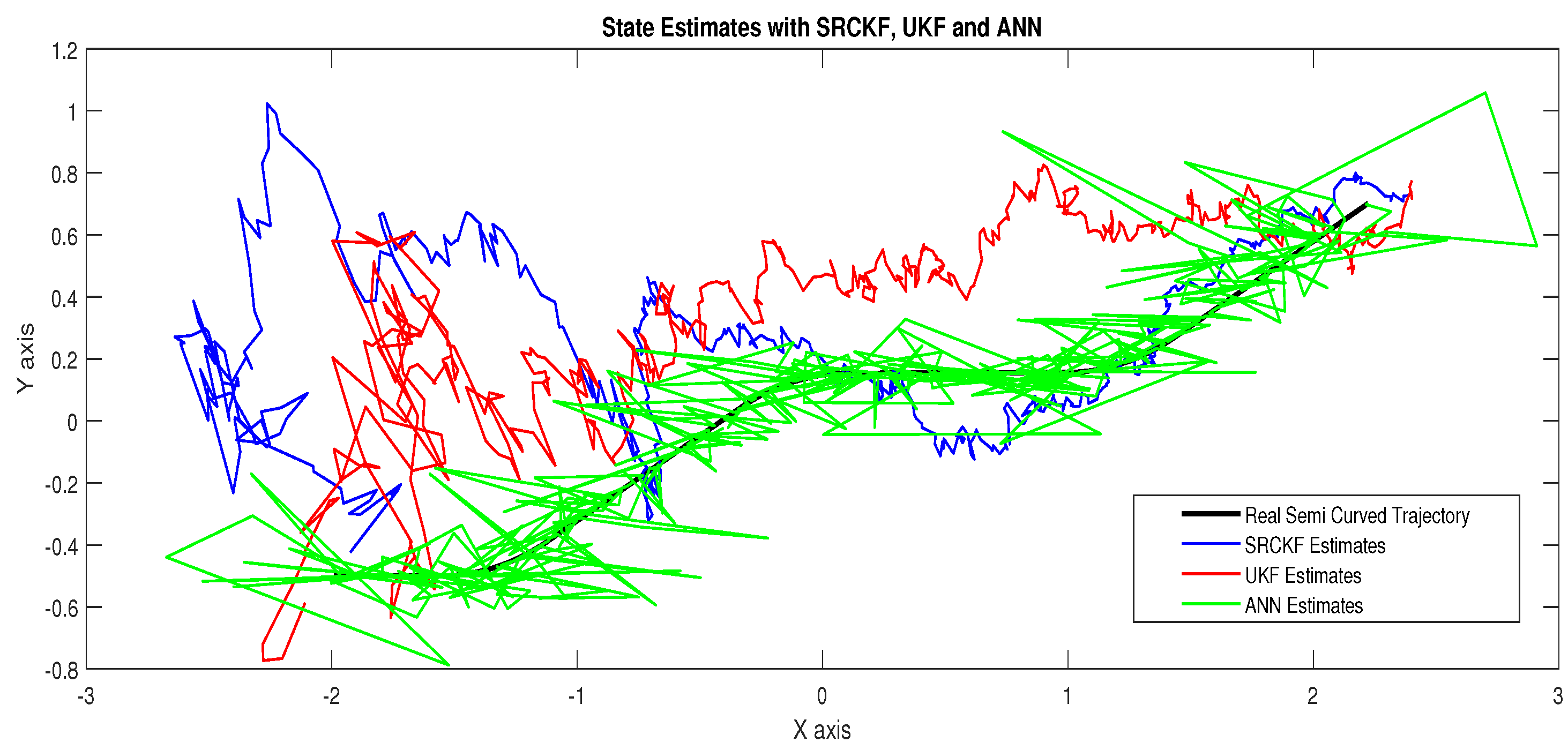
- In Figure 9, state estimates of ANN are compared with other two conventional filtering techniques and it is clear that ANN is also showing better accuracy rate for estimating the true trajectory of the dynamic object in this scenario.
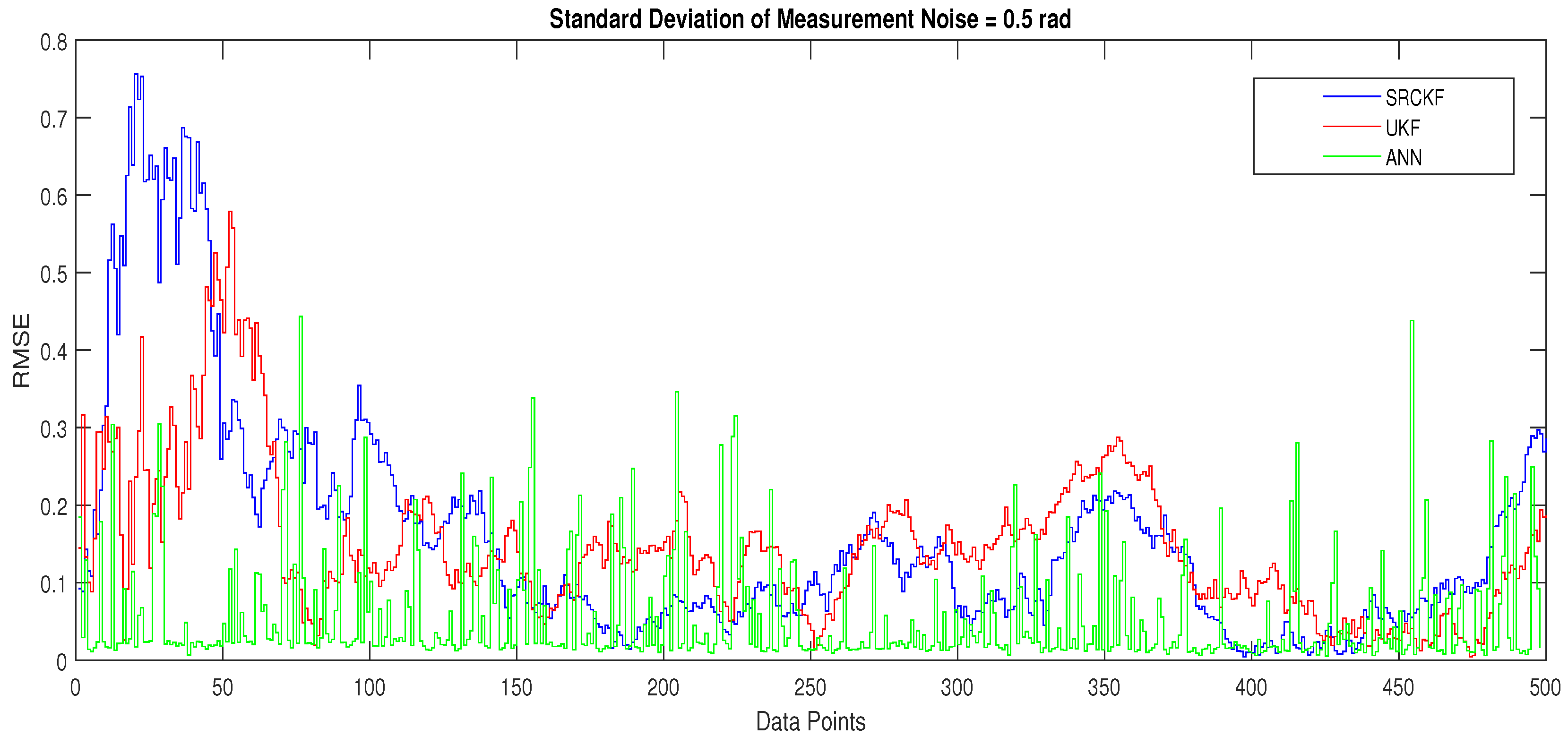
- In Figure 10, RMSE between true and estimated position of the dynamic object is represented which is expressing competency of ANN over conventional filtering algorithms of SRCKF and UKF.
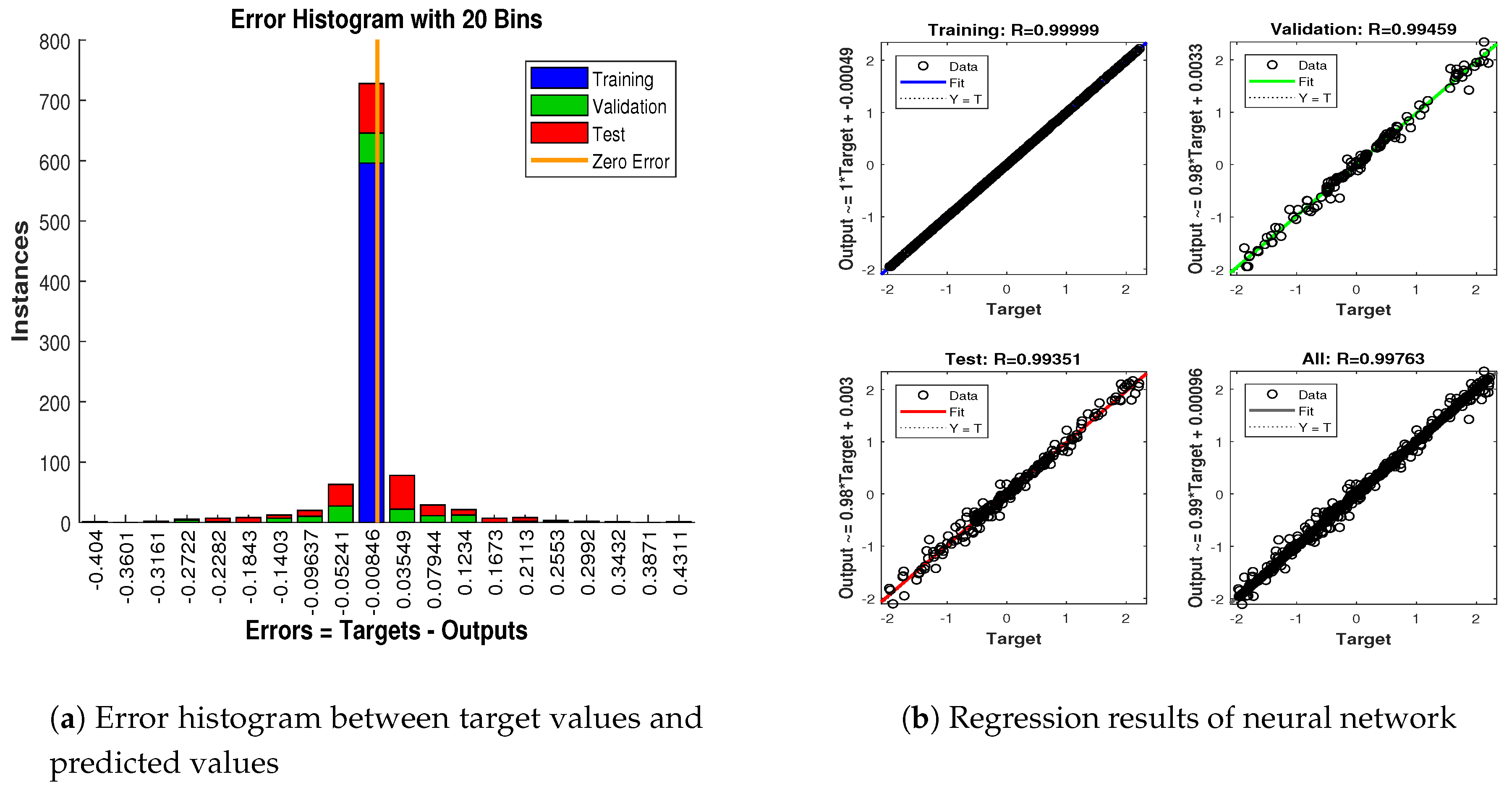
- In Figure 11a, error histogram is shown between target values and estimated value of the target’s position after training feedback ANN. At the mid of the plot, a bin corresponding to the error of −0.00846 and the height of that bin for training data set lies near to 700 samples while validation and test data set lie between 700 and 800 samples. It means that many samples from different data sets have an error lies in that following range. In this scenario, zero error point falls under the bin with center −0.00846.
- In Figure 11b, the regression results of ANN scheme are presented for training, validation and testing process. In regression results efficiency of ANN is seen by linear trend and the adjacent response of actual target and predicted output.
4.1.3. Scenario 3: Measurement Noise = 1 Radian
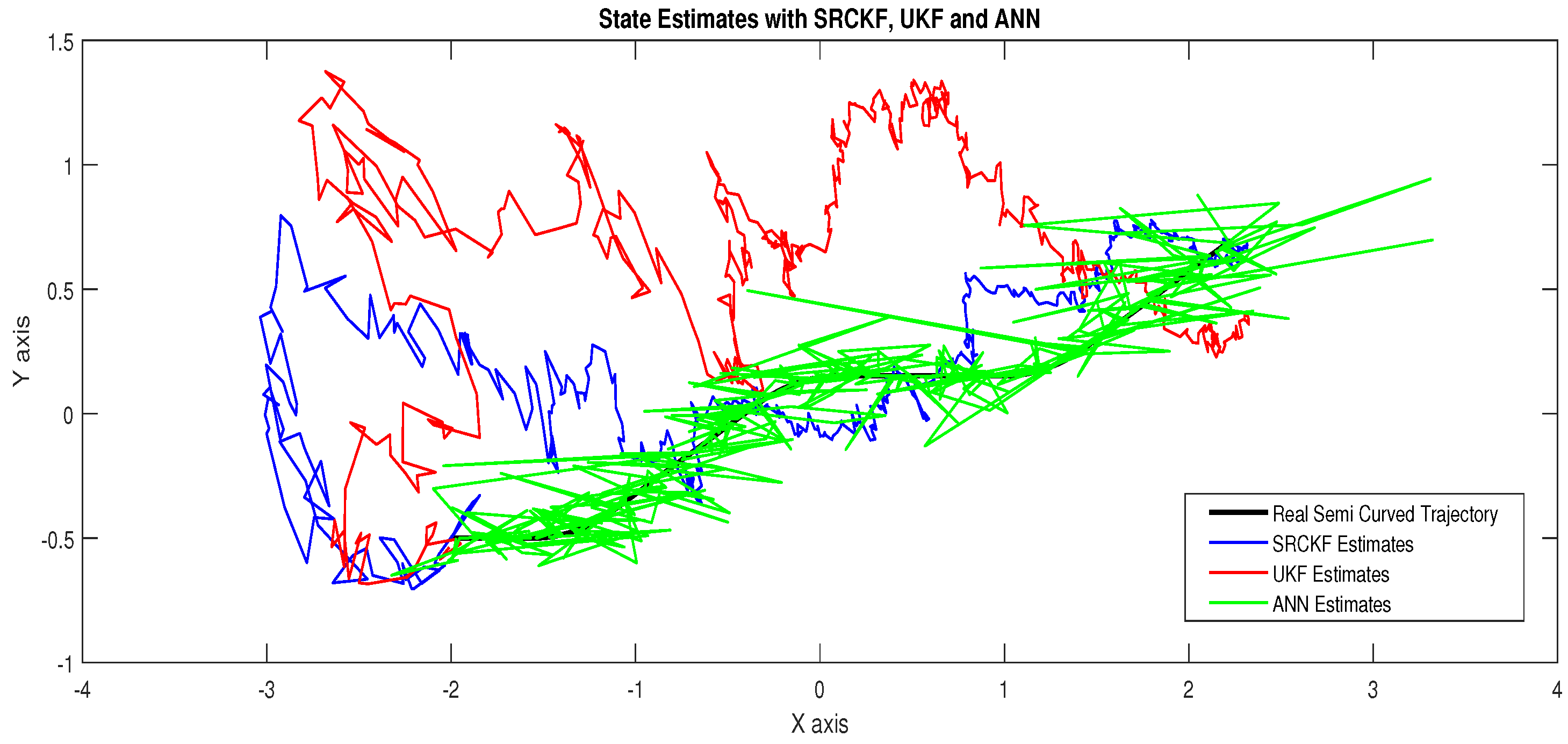
- In Figure 12, the state estimates of all techniques are shown in which it is wort noting that again ANN is estimating real state object with efficiency as compared to SRCKF and UKF.
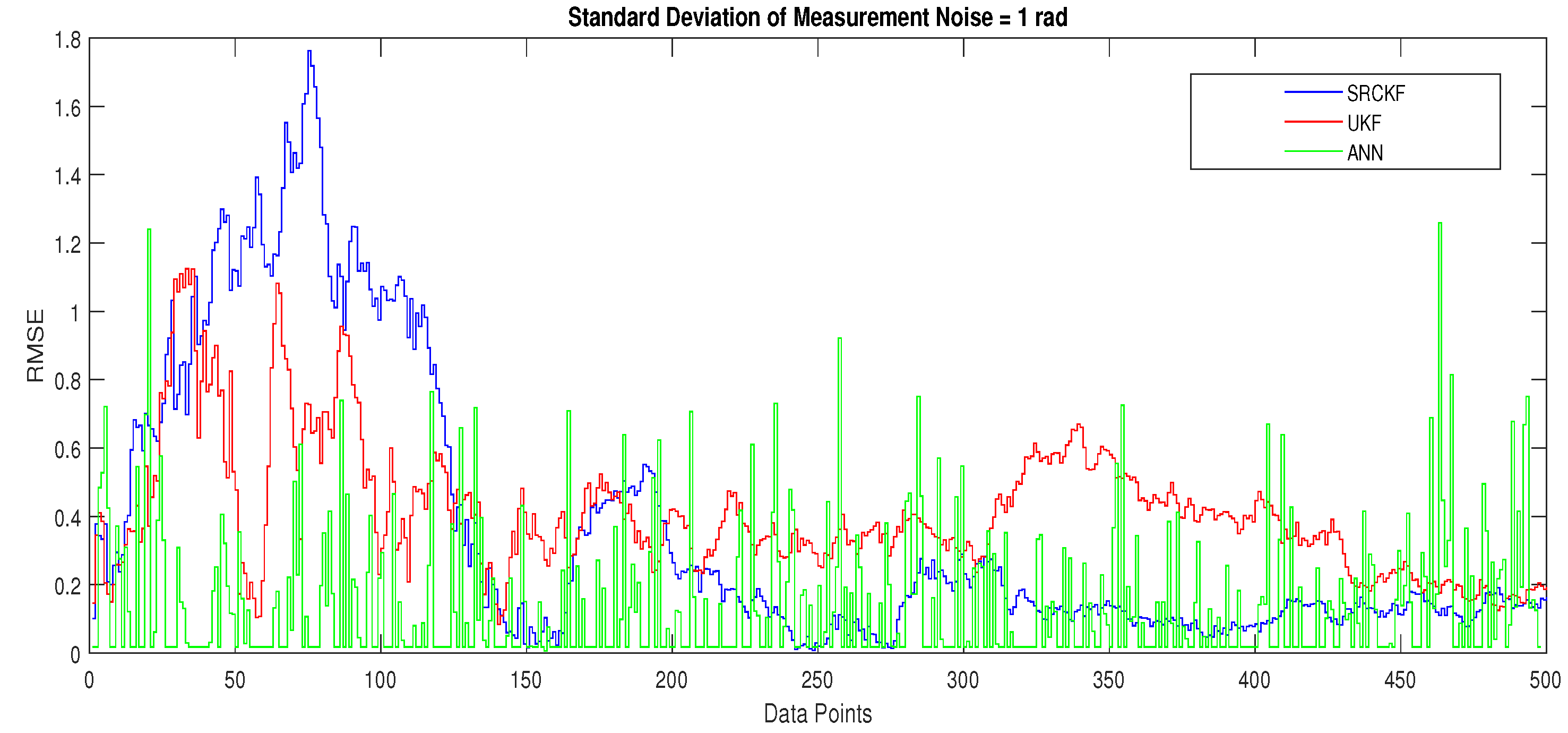
- In Figure 13, RMSE between true and estimated position of the dynamic object is represented which is also depicting the competency of ANN as compared to conventional filtering algorithms.
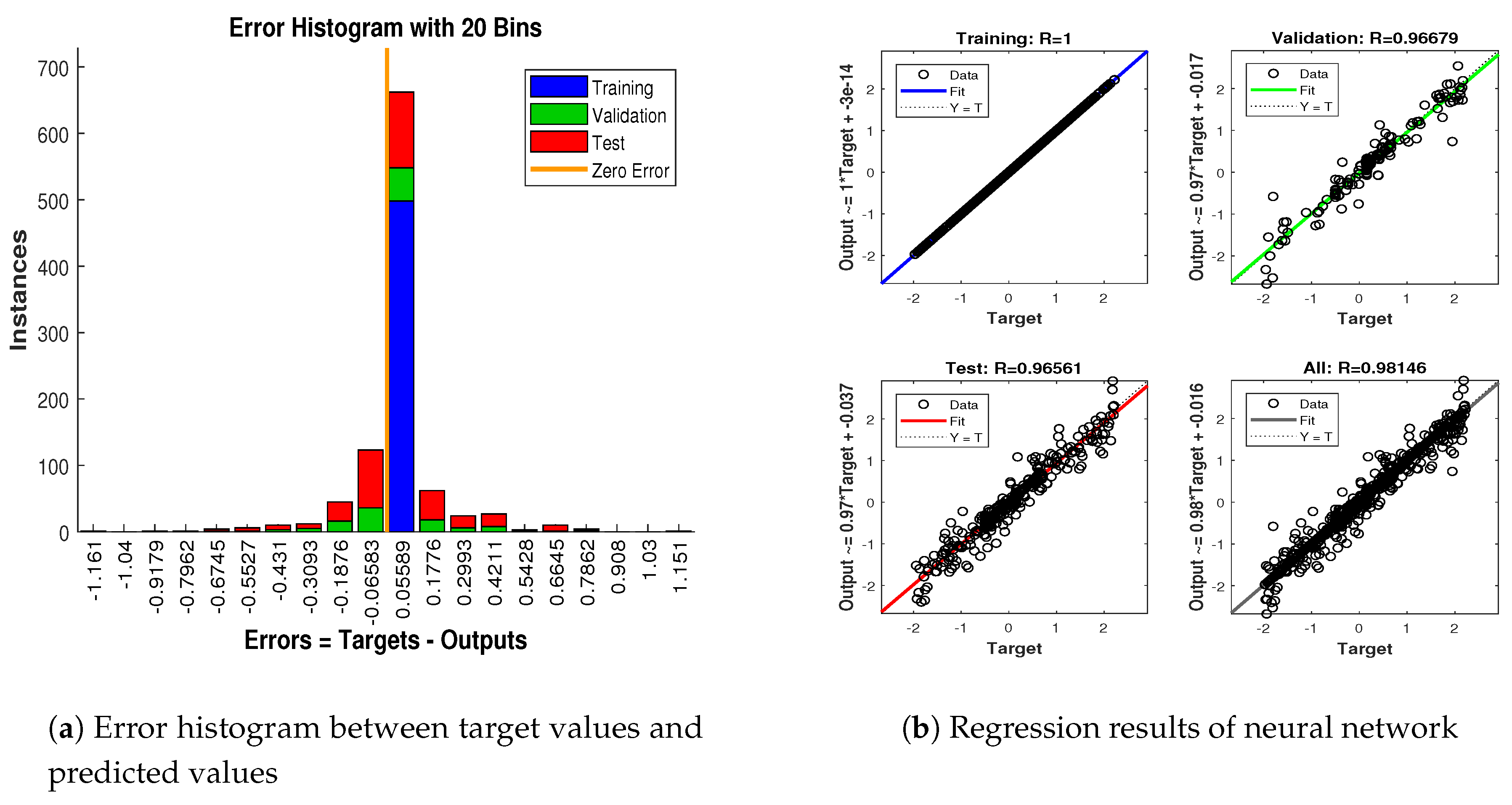
- In Figure 14a, error histogram is shown between target values and the estimated value of target’s position after training feedback ANN. At the mid of the plot, a bin corresponding to the error of 0.05589 and the height of that bin for training data set lie near to 700 data points while validation and test data set lies between 600 and 700 data points. It means that many samples from different data sets have an error that lies in that given range. In this scenario, the zero error point falls under the bin with center 0.05589.
- In Figure 14b, regression results of ANN scheme are presented for training, validation and testing process. In regression results, there is small divergence between actual target and predicted output because of sufficient amount of noise.
4.1.4. Scenario 4: Measurement Noise = 1.5 Radian
- In Figure 15, state estimates of ANN, SRCKF and UKF are presented in which it is clearly seen that ANN is converging more than other two algorithms.
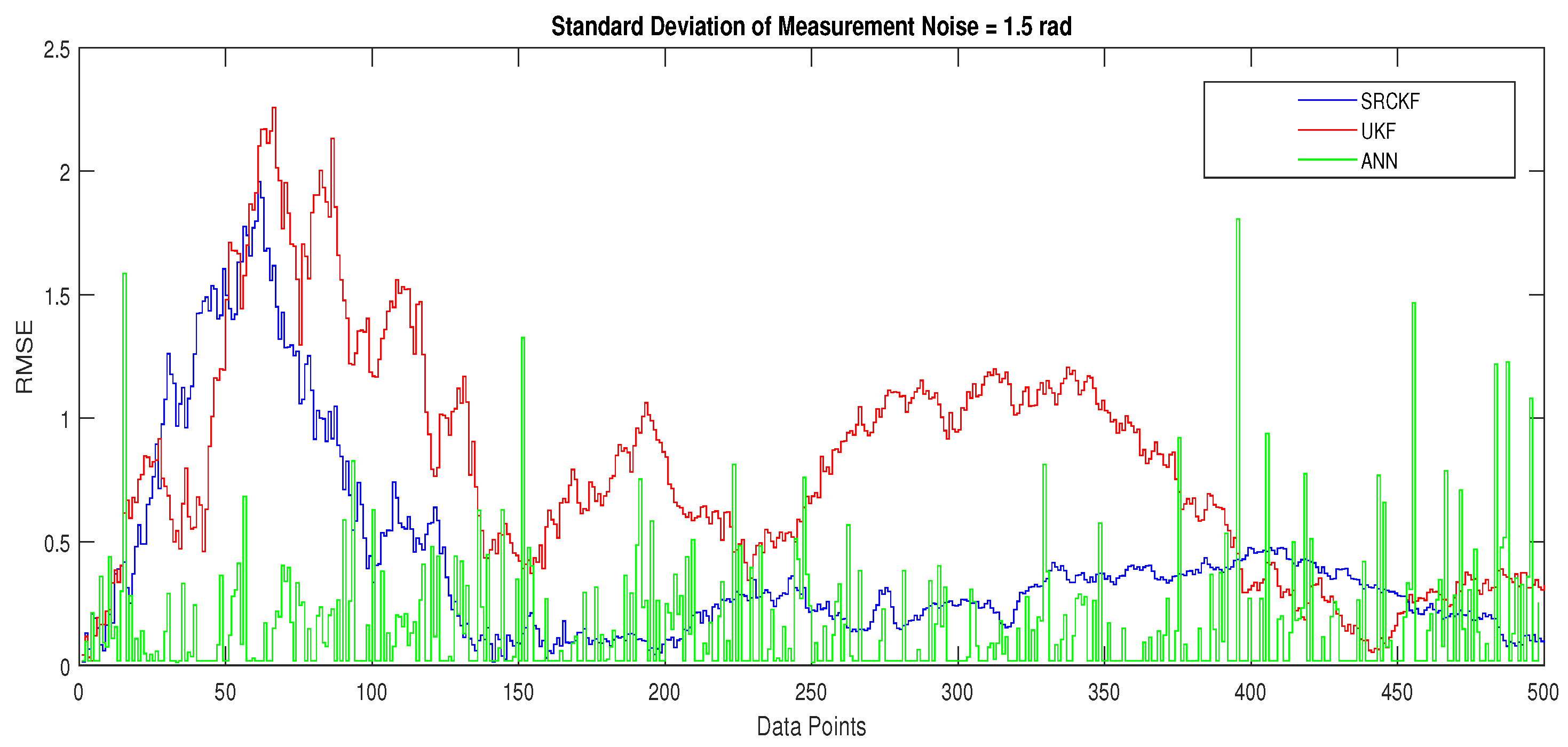
- In Figure 16, RMSE between true and estimated position of the dynamic object is represented which is also showing that ANN has less position error from SRCKF and UKF.
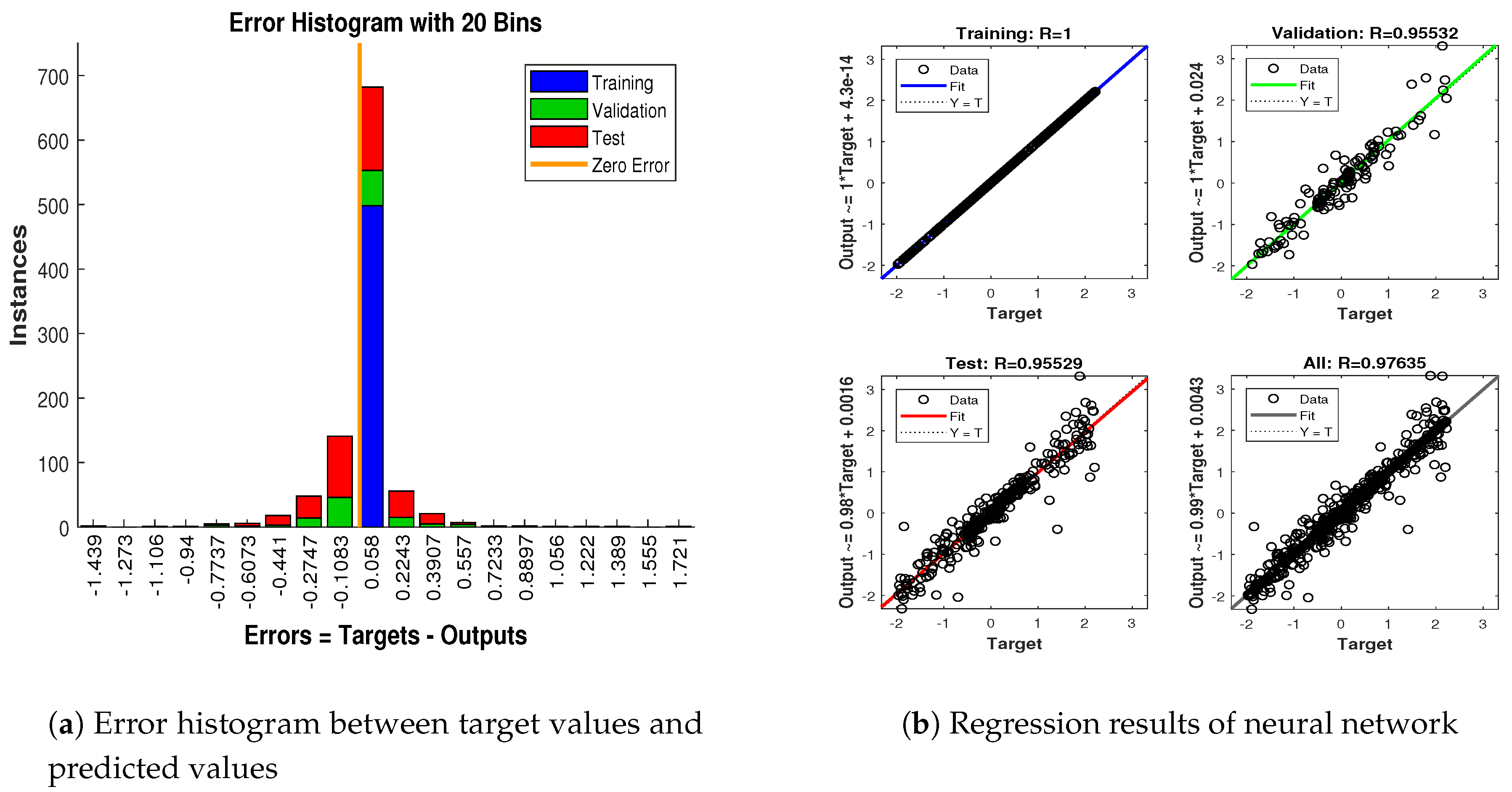
- In Figure 17a, error histogram is shown between target values and estimated value of target’s position after the training feedback ANN model. At the mid of the plot, a bin corresponding to the error of 0.058 and the height of that bin for training data set lies near to 700 samples while validation and test data set lie between 600 and 700 samples. It means that many samples from different data sets have an error lies in that following range. Zero error line corresponding to the zero-error value on the error axis. In this scenario, zero error point falls under the bin with center 0.058.
- In Figure 17b, the regression analysis of ANN modeling is presented for the training, validation and testing process. In regression results some distance is appearing between actual target and predicted output because of noisy ocean condition.
4.1.5. Scenario 5: Measurement Noise = 2 Radian
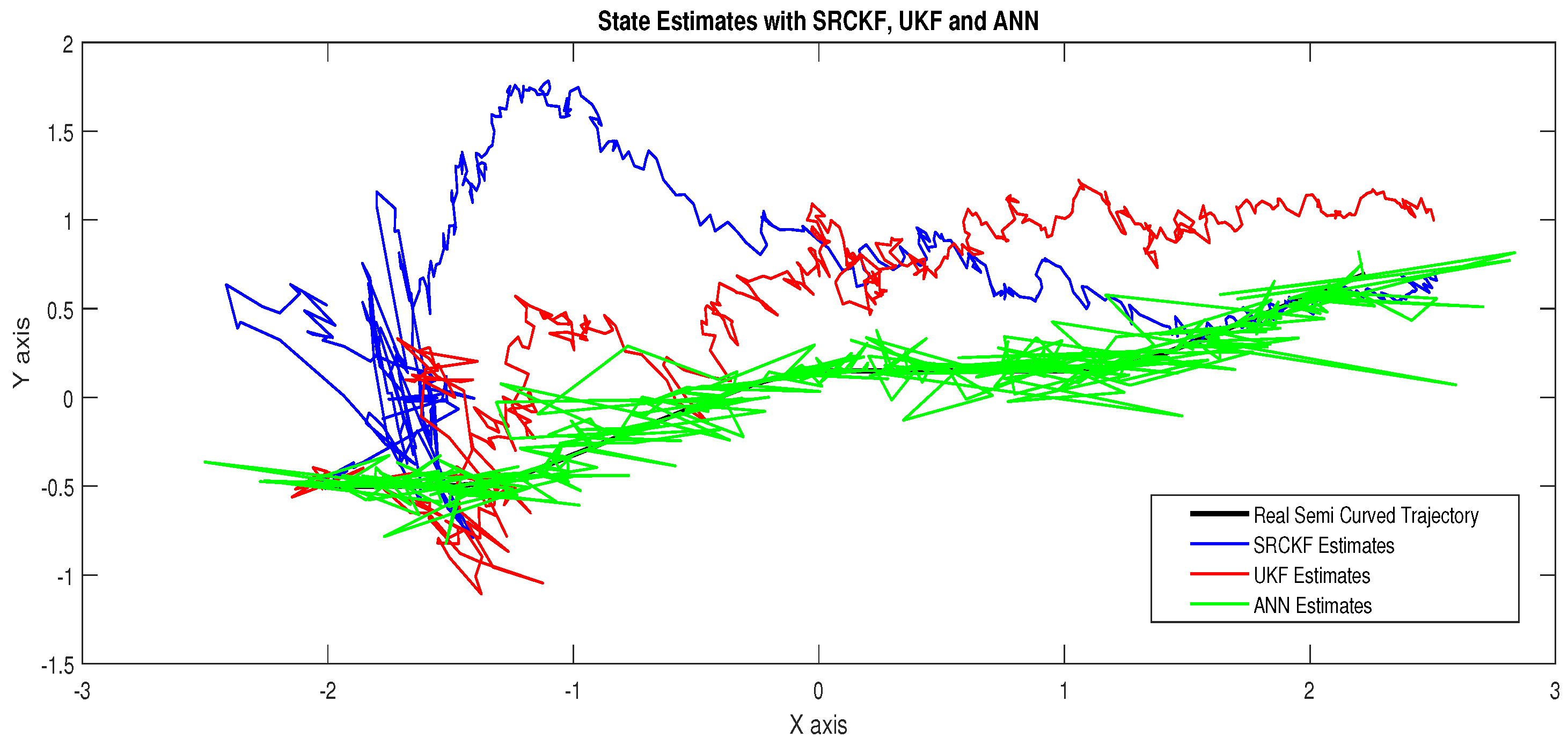
- State estimates of SRCKF, UKF and ANN are presented in Figure 18 and again ANN performs far better at estimating the semi-curved trajectory than the other two algorithms.
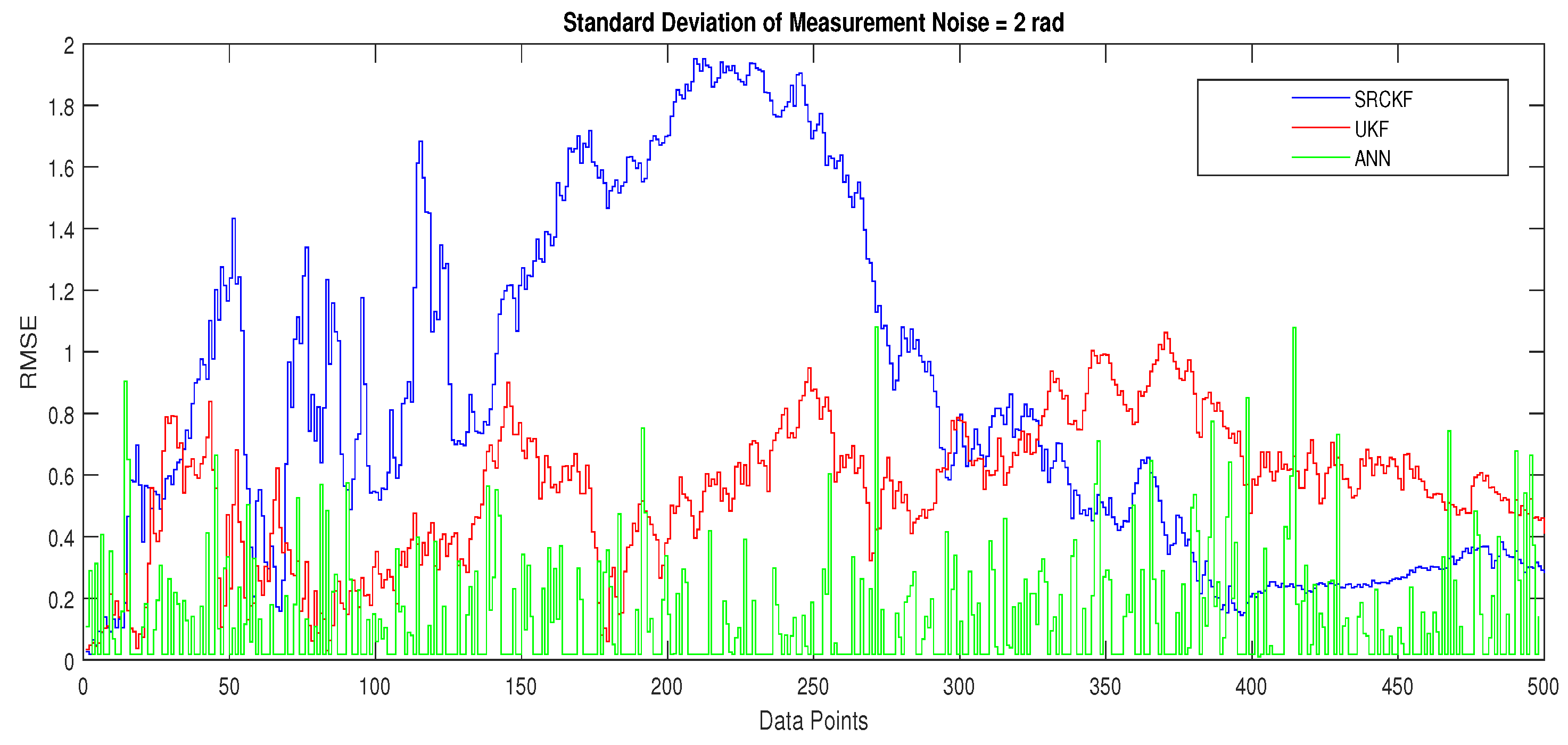
- In Figure 19, RMSE between true and estimated position of dynamic object is represented which is showing that ANN has less position error as compared SRCKF and UKF.
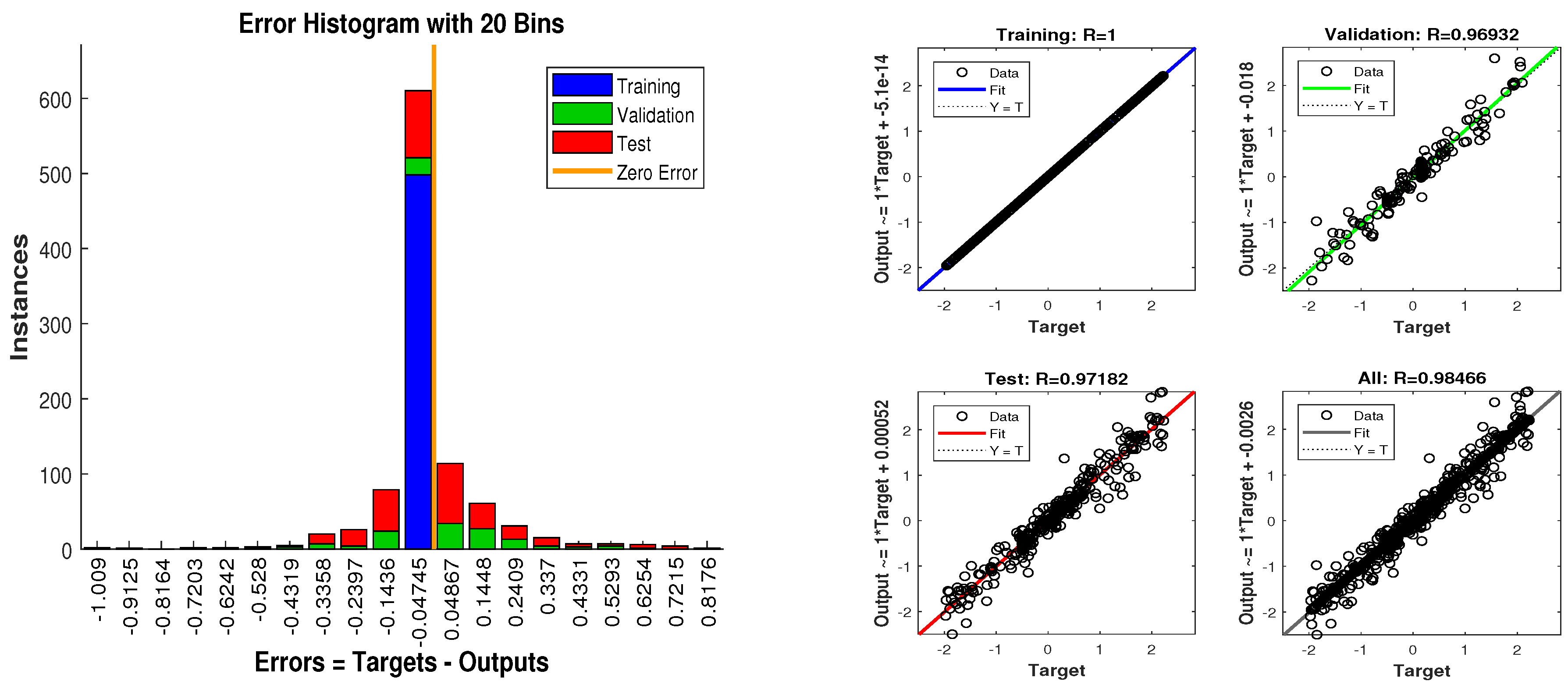
- In Figure 20a, the error histogram is shown between target values and estimated value of target’s position after training feedback ANN. At the mid of the plot, a bin corresponding to the error of −0.04745 and the height of that bin for training data set lie near to 600 samples while validation and test data set lie between 500 and 600 samples. It means that many samples from different data sets have an error lies in that following range. In this case, the zero error point falls under the bin with center −0.04745.
- In Figure 20b, the regression results of ANN modeling are presented for the training, validation and testing process. In the regression results, some divergence between the actual target and the predicted output appears because of complex noisy bearings.
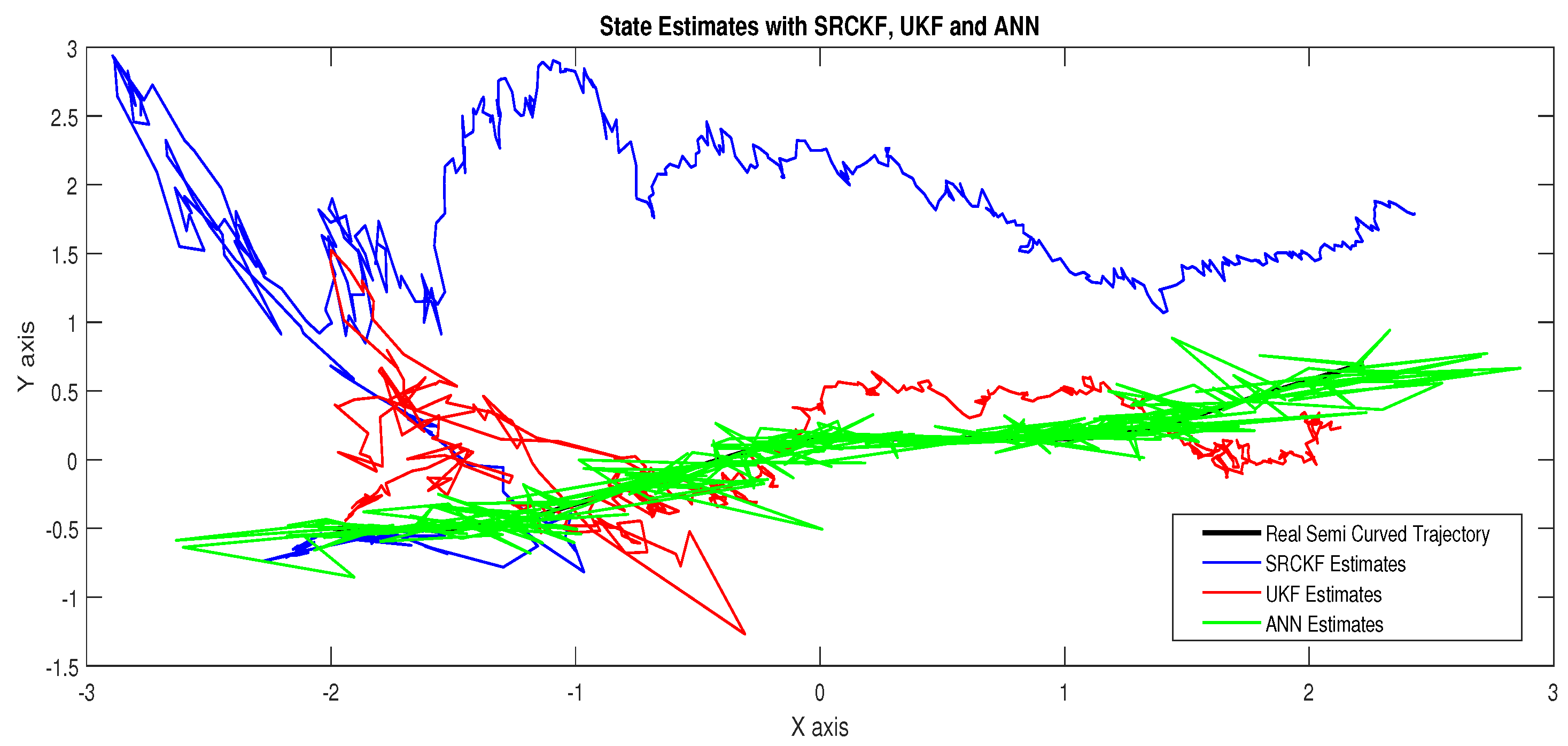
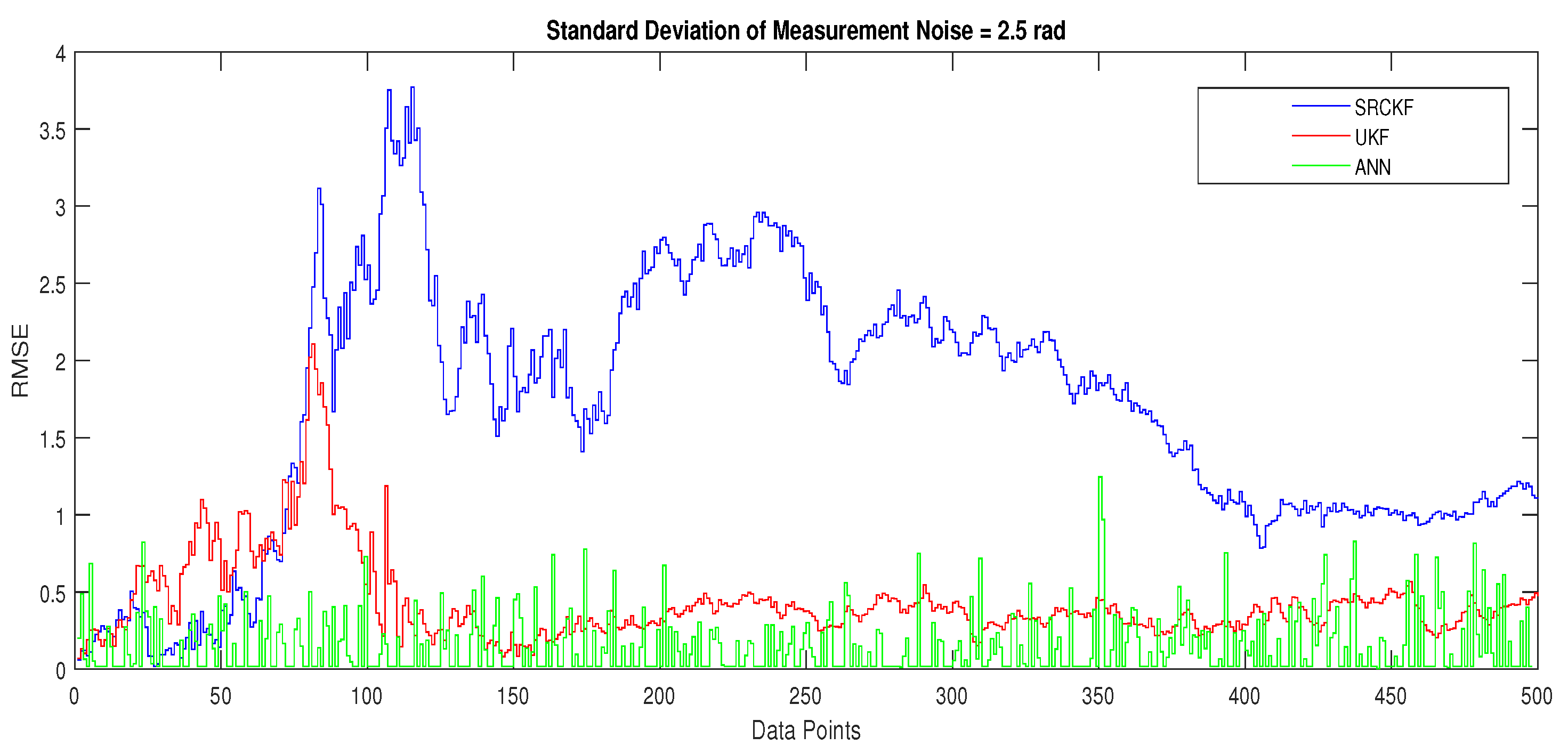
4.1.6. Scenario 6: Measurement Noise = 2.5 Radian
- In Figure 21, state estimates of ANN are analyzed with other two conventional filtering techniques and it is worth to note that ANN is also showing its command even in the cluttered ocean environment.
- In Figure 22, RMSE between true and estimated position of dynamic object is represented which showing that ANN is estimating position of passive dynamic object with less position error.
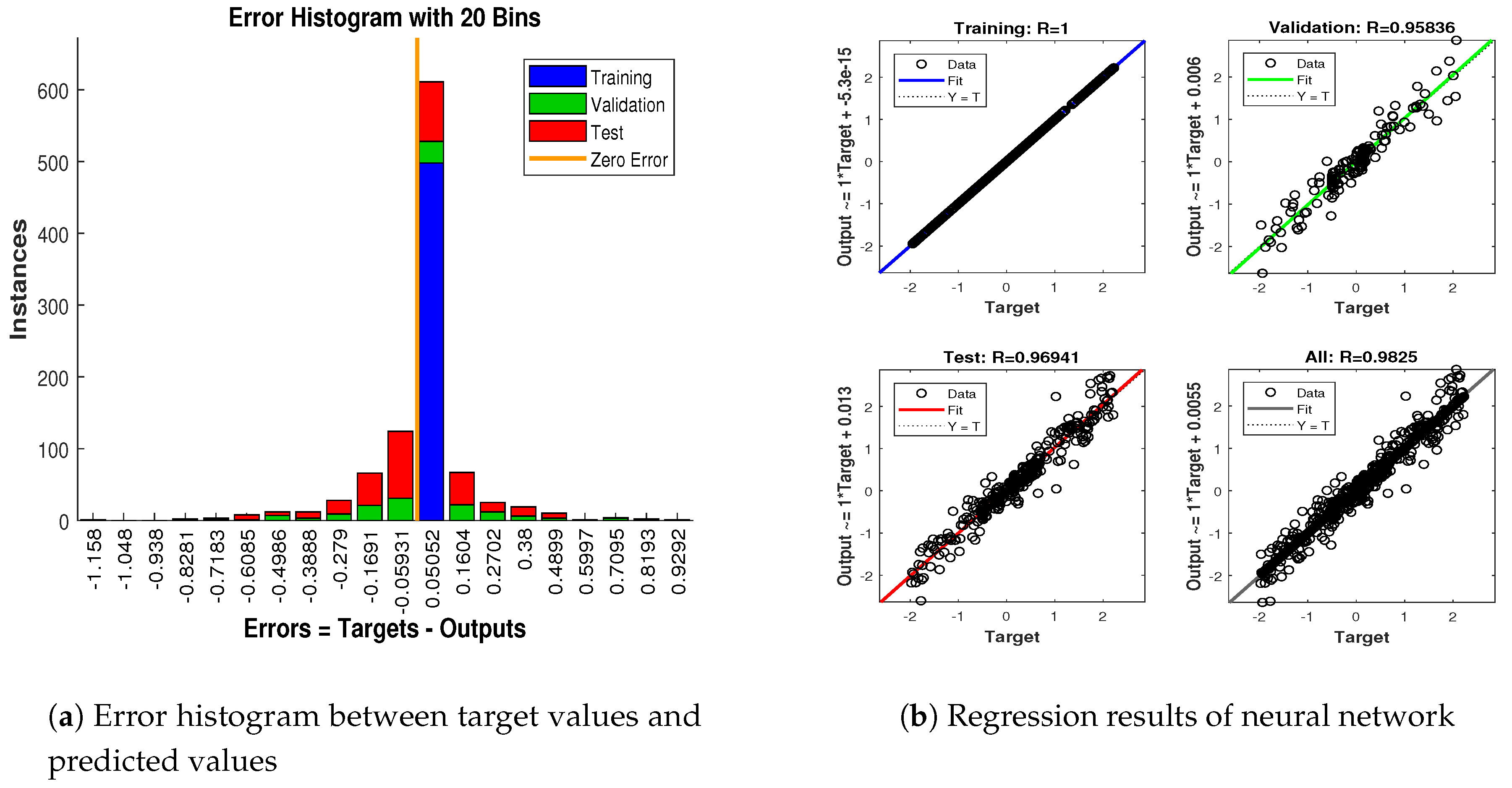
- In Figure 23a, the error histogram is shown between target time series and estimated value of target’s position after training the neural network. At the center of the graph, a bin incorporating the error of 0.05052 and the height of that bin for training data set lies near to 600 samples while the validation and test data set lie between 500 and 600 samples. It means that many samples from different data sets have an error that lies in that following range. In this case, the zero error point falls under the bin with center 0.05052.
- In Figure 23b, the regression output of the ANN modeling is presented for training, validation and testing purposes. In the regression results, many divergence points between the actual target and the predicted output appear because this scenario has extremely noisy passive bearings.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ge, B.; Zhang, H.; Jiang, L.; Li, Z.; Butt, M.M. Adaptive unscented Kalman filter for target tracking with unknown time-varying noise covariance. Sensors 2019, 19, 1371. [Google Scholar] [CrossRef]
- Li, Y.; Chen, X.; Yu, J.; Yang, X. NA fusion frequency feature extraction method for underwater acoustic signal based on variational mode decomposition, duffing chaotic oscillator and a kind of permutation entropy. Electronics 2019, 8, 61. [Google Scholar] [CrossRef]
- Ali, W.; Li, Y.; Raja, M.A.Z.; Ahmed, N. Generalized pseudo Bayesian algorithms for tracking of multiple model underwater maneuvering target. Appl. Acoust. 2020, 166, 107345. [Google Scholar] [CrossRef]
- Patra, N.; Sadhu, S.; Ghoshal, T.K. Adaptive state estimation for tracking of civilian aircraft. IET Sci. Meas. Technol. 2018, 12, 777–784. [Google Scholar] [CrossRef]
- Fan, X.; Shang, S.; Song, D.; Sun, W.; Wen, Y. Weak target detection technology of passive radar on the navigation satellite signal. J. Eng. 2019, 2019, 6671–6674. [Google Scholar] [CrossRef]
- Hong, J.; Laflamme, S.; Dodson, J.; Joyce, B. Introduction to state estimation of high-rate system dynamics. Sensors 2018, 18, 217. [Google Scholar] [CrossRef]
- Wirnshofer, F.; Schmitt, P.S.; Meister, P.; Wichert, G.V.; Burgard, W. State estimation in contact-rich manipulation. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 3790–3796. [Google Scholar]
- Luo, J.; Han, Y.; Fan, L. Underwater Acoustic Target Tracking: A Review. Sensors 2018, 18, 112. [Google Scholar] [CrossRef]
- Ahmed, H.; Ullah, I.; Khan, U.; Qureshi, M.B.; Manzoor, S.; Muhammad, N.; Shahid Khan, M.U.; Nawaz, R. Adaptive Filtering on GPS-Aided MEMS-IMU for Optimal Estimation of Ground Vehicle Trajectory. Sensors 2019, 19, 5357. [Google Scholar] [CrossRef]
- Li, X.; Zhao, C.; Yu, J.; Wei, W. Underwater Bearing-Only and Bearing-Doppler Target Tracking Based on Square Root Unscented Kalman Filter. Entropy 2019, 21, 740. [Google Scholar] [CrossRef]
- Li, Y.; Cheng, Y.; Li, X.; Wang, H.; Hua, X.; Qin, Y. Bayesian Nonlinear Filtering via Information Geometric Optimization. Entropy 2017, 19, 655. [Google Scholar] [CrossRef]
- Nguyen, N.H.; Doğançay, K. Multistatic pseudolinear target motion analysis using hybrid measurements. Signal Process. 2017, 130, 22–36. [Google Scholar] [CrossRef]
- Pei, Y.; Biswas, S.; Fussell, D.S.; Pingali, K. An elementary introduction to kalman filtering. Commun. ACM 2019, 62, 122–133. [Google Scholar] [CrossRef]
- He, Y.; Jiang, J.; Huang, H.; Zhuo, S.; Wu, Y. Kalman Filtering Algorithm for Systems with Stochastic Nonlinearity Functions, Finite-Step Correlated Noises, and Missing Measurements. Discret. Dyn. Nat. Soc. 2018, 2018, 1516028. [Google Scholar] [CrossRef]
- Zhang, M.; Li, K.; Hu, B.; Meng, C. Comparison of Kalman Filters for Inertial Integrated Navigation. Sensors 2019, 19, 1426. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. New extension of the Kalman filter to nonlinear systems. Signal Process. Sens. Fusion Target Recognit. VI 1997, 3068, 182–193. [Google Scholar]
- Leung, H.; Zhu, Z.; Ding, Z. An aperiodic phenomenon of the extended Kalman filter in filtering noisy chaotic signals. Mech. Syst. Signal Process. 2020, 143, 106837. [Google Scholar] [CrossRef]
- Lee, Y.; Majda, A.J. State estimation and prediction using clustered particle filters. Proc. Natl. Acad. Sci. USA 2016, 113, 14609–14614. [Google Scholar] [CrossRef]
- Ali, W.; Li, Y.; Tanoli, S.A.K.; Raja, M.A.Z.; Javaid, K.; Ahmed, N. SConvergence Analysis of Unscented Transform for Underwater Passive Target Tracking in Noisy Environment. In Proceedings of the 2019 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Dalian, China, 20–22 September 2019; pp. 1–6. [Google Scholar]
- Wang, Y.; Qiu, Z.; Qu, X. An improved unscented Kalman filter for discrete nonlinear systems with random parameters. Discret. Dyn. Nat. Soc. 2017, 2017, 7905690. [Google Scholar] [CrossRef]
- Ali, W.; Li, Y.; Chen, Z.; Raja, M.A.Z.; Ahmed, N.; Chen, X. Application of Spherical-Radial Cubature Bayesian Filtering and Smoothing in Bearings Only Passive Target Tracking. Entropy 2019, 21, 1088. [Google Scholar] [CrossRef]
- Su, J.; Li, Y.; Ali, W. Underwater angle-only tracking with propagation delay and time-offset between observers. Signal Process. 2020, 176, 107581. [Google Scholar] [CrossRef]
- Qin, W.; Wang, X.; Cui, N. Maximum correntropy sparse Gauss–Hermite quadrature filter and its application in tracking ballistic missile. IET Radar Sonar Navig. 2017, 11, 1388–1396. [Google Scholar] [CrossRef]
- Jia, B.; Xin, M.; Cheng, Y. Sparse-grid quadrature nonlinear filtering. Automatica 2012, 48, 327–341. [Google Scholar] [CrossRef]
- Hou, J.; Yang, Y.; Gao, T. Variational Bayesian based adaptive shifted Rayleigh filter for bearings-only tracking in clutters. Sensors 2019, 19, 1512. [Google Scholar] [CrossRef]
- Zhang, Z.; Fu, K.; Sun, X.; Ren, W. Multiple target tracking based on multiple hypotheses tracking and modified ensemble Kalman filter in multi-sensor fusion. Sensors 2019, 19, 3118. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Li, Y.; Yu, J.; Li, Y. Developing the fuzzy c-means clustering algorithm based on maximum entropy for multitarget tracking in a cluttered environment. J. Appl. Remote Sens. 2018, 12, 016019. [Google Scholar] [CrossRef]
- Ahmad, I.; Zahid, H.; Ahmad, F.; Raja, M.A.Z.; Baleanu, D. Design of computational intelligent procedure for thermal analysis of porous fin model. Chin. J. Phys. 2019, 59, 641–655. [Google Scholar] [CrossRef]
- Khan, J.A.; Raja, M.A.Z.; Rashidi, M.M.; Syam, M.I.; Wazwaz, A.M. Nature-inspired computing approach for solving non-linear singular Emden–Fowler problem arising in electromagnetic theory. Connect. Sci. 2015, 27, 377–396. [Google Scholar] [CrossRef]
- Ahmad, I.; Ahmad, S.; Awais, M.; Ahmad, S.U.I.; Raja, M.A.Z. Neuro-evolutionary computing paradigm for Painlevé equation-II in nonlinear optics. Eur. Phys. J. Plus 2018, 133, 184. [Google Scholar] [CrossRef]
- Mehmood, A.; Zameer, A.; Ling, S.H.; Raja, M.A.Z. Design of neuro-computing paradigms for nonlinear nanofluidic systems of MHD Jeffery–Hamel flow. J. Taiwan Inst. Chem. Eng. 2018, 91, 57–85. [Google Scholar] [CrossRef]
- Raja, M.A.Z.; Umar, M.; Sabir, Z.; Khan, J.A.; Baleanu, D. A new stochastic computing paradigm for the dynamics of nonlinear singular heat conduction model of the human head. Eur. Phys. J. Plus 2018, 133, 364. [Google Scholar] [CrossRef]
- Sabir, Z.; Wahab, H.A.; Umar, M.; Sakar, M.G.; Raja, M.A.Z. Novel design of Morlet wavelet neural network for solving second order Lane–Emden equation. Math. Comput. Simul. 2020, 172, 1–14. [Google Scholar] [CrossRef]
- Bukhari, A.H.; Sulaiman, M.; Islam, S.; Shoaib, M.; Kumam, P.; Raja, M.A.Z. Neuro-fuzzy modeling and prediction of summer precipitation with application to different meteorological stations. Alex. Eng. J. 2020, 59, 101–116. [Google Scholar] [CrossRef]
- Raja, M.A.Z.; Mehmood, A.; ur Rehman, A.; Khan, A.; Zameer, A. Bio-inspired computational heuristics for Sisko fluid flow and heat transfer models. Appl. Soft Comput. 2018, 71, 622–648. [Google Scholar] [CrossRef]
- Ahmad, I.; Raja, M.A.Z.; Bilal, M.; Ashraf, F. Neural network methods to solve the Lane–Emden type equations arising in thermodynamic studies of the spherical gas cloud model. Neural Comput. Appl. 2017, 28, 929–944. [Google Scholar] [CrossRef]
- Raja, M.A.Z.; Niazi, S.A.; Butt, S.A. An intelligent computing technique to analyze the vibrational dynamics of rotating electrical machine. Neurocomputing 2017, 219, 280–299. [Google Scholar] [CrossRef]
- Ahmad, I.; Ahmad, F.; Raja, M.A.Z.; Ilyas, H.; Anwar, N.; Azad, Z. Intelligent computing to solve fifth-order boundary value problem arising in induction motor models. Neural Comput. Appl. 2018, 29, 449–466. [Google Scholar] [CrossRef]
- Sabir, Z.; Manzar, M.A.; Raja, M.A.Z.; Sheraz, M.; Wazwaz, A.M. Neuro-heuristics for nonlinear singular Thomas-Fermi systems. Appl. Soft Comput. 2018, 65, 152–169. [Google Scholar] [CrossRef]
- Raja, M.A.Z.; Shah, F.H.; Tariq, M.; Ahmad, I. Design of artificial neural network models optimized with sequential quadratic programming to study the dynamics of nonlinear Troesch’s problem arising in plasma physics. Neural Comput. Appl. 2018, 29, 83–109. [Google Scholar] [CrossRef]
- Ahmad, I.; Raja, M.A.Z.; Bilal, M.; Ashraf, F. Bio-inspired computational heuristics to study Lane–Emden systems arising in astrophysics model. SpringerPlus 2016, 5, 1866. [Google Scholar] [CrossRef] [PubMed]
- Esteves, J.T.; de Souza Rolim, G.; Ferraudo, A.S. Rainfall prediction methodology with binary multilayer perceptron neural networks. Clim. Dyn. 2019, 52, 2319–2331. [Google Scholar] [CrossRef]
- Hatata, A.Y.; Eladawy, M. Prediction of the true harmonic current contribution of nonlinear loads using NARX neural network. Alex. Eng. J. 2018, 57, 1509–1518. [Google Scholar] [CrossRef]
- Solanki, V.; Joshi, M. Energy Efficient NARX Model for Target Tracking in Wireless Sensor Network. In Proceedings of the 2018 3rd IEEE International Conference on Recent Trends in Electronics, Information & Communication Technology (RTEICT), Bangalore, India, 18–19 May 2018; pp. 260–265. [Google Scholar]
- Peng, J.; Tang, Q. Application of NARX Dynamic Neural Network in Quantitative Investment Forecasting System. In International Symposium on Intelligence Computation and Applications, Proceedings of the 11th International Symposium, ISICA 2019, Guangzhou, China, 16–17 November 2019; Springer: Berlin/Heidelberg, Germany, 2019; pp. 628–635. [Google Scholar]
- Pisoni, E.; Farina, M.; Carnevale, C.; Piroddi, L. PForecasting peak air pollution levels using NARX models. Eng. Appl. Artif. Intell. 2009, 22, 593–602. [Google Scholar] [CrossRef]
- Raptodimos, Y.; Lazakis, I. Application of NARX neural network for predicting marine engine performance parameters. Ships Offshore Struct. 2020, 15, 443–452. [Google Scholar] [CrossRef]
- Liu, J.; Li, T.; Zhang, Z.; Chen, J. NARX prediction-based parameters online tuning method of intelligent PID system. IEEE Access 2020, 8, 130922–130936. [Google Scholar] [CrossRef]
- Rangel, E.; Cadenas, E.; Campos-Amezcua, R.; Tena, J.L. Enhanced Prediction of Solar Radiation Using NARX Models with Corrected Input Vectors. Energies 2020, 13, 2576. [Google Scholar] [CrossRef]
- Zameer, A.; Muneeb, M.; Mirza, S.M.; Raja, M.A.Z. Fractional-order particle swarm based multi-objective PWR core loading pattern optimization. Ann. Nucl. Energy 2020, 135, 106982. [Google Scholar] [CrossRef]
- Muhammad, Y.; Khan, R.; Ullah, F.; ur Rehman, A.; Aslam, M.S.; Raja, M.A.Z. Design of fractional swarming strategy for solution of optimal reactive power dispatch. Neural Comput. Appl. 2019, 11, 1–18. [Google Scholar] [CrossRef]
- Akbar, S.; Zaman, F.; Asif, M.; Rehman, A.U.; Raja, M.A.Z. Novel application of FO-DPSO for 2-D parameter estimation of electromagnetic plane waves. Neural Comput. Appl. 2019, 31, 3681–3690. [Google Scholar] [CrossRef]
- Lodhi, S.; Manzar, M.A.; Raja, M.A.Z. Fractional neural network models for nonlinear Riccati systems. Neural Comput. Appl. 2019, 31, 359–378. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Setting |
|---|---|
| Initial position and velocity of object | = |
| Location function of observer elements | |
| Number of sensors | = 8 |
| Spacing of sensors | 0.5 |
| Standard deviation of measurement noise | |
| Spectral density of process noise | |
| Step size | |
| Number of delays | = 2 |
| Data points | 500 |
| Number of hidden neurons | 100 |
| Number of target time step | 1000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ali, W.; Khan, W.U.; Raja, M.A.Z.; He, Y.; Li, Y. Design of Nonlinear Autoregressive Exogenous Model Based Intelligence Computing for Efficient State Estimation of Underwater Passive Target. Entropy 2021, 23, 550. https://doi.org/10.3390/e23050550
Ali W, Khan WU, Raja MAZ, He Y, Li Y. Design of Nonlinear Autoregressive Exogenous Model Based Intelligence Computing for Efficient State Estimation of Underwater Passive Target. Entropy. 2021; 23(5):550. https://doi.org/10.3390/e23050550
Chicago/Turabian StyleAli, Wasiq, Wasim Ullah Khan, Muhammad Asif Zahoor Raja, Yigang He, and Yaan Li. 2021. "Design of Nonlinear Autoregressive Exogenous Model Based Intelligence Computing for Efficient State Estimation of Underwater Passive Target" Entropy 23, no. 5: 550. https://doi.org/10.3390/e23050550
APA StyleAli, W., Khan, W. U., Raja, M. A. Z., He, Y., & Li, Y. (2021). Design of Nonlinear Autoregressive Exogenous Model Based Intelligence Computing for Efficient State Estimation of Underwater Passive Target. Entropy, 23(5), 550. https://doi.org/10.3390/e23050550