Incomplete Information Management Using an Improved Belief Entropy in Dempster-Shafer Evidence Theory


Abstract
1. Introduction
2. Preliminaries
2.1. Dempster-Shafer Evidence Theory
2.2. Shannon Entropy and Belief Entropy
3. The Improved Belief Entropy
3.1. The Open Deng Entropy
- The parameter represents the value of mass function of empty set, and parameter is the potential of the FOD. In the evidence theoretical framework, the two have clear physical meanings.
- When the information space degenerates from the open world to the closed world, the value of the empty set mass function is 0, which keeps good compatibility with the improved Deng entropy method.
3.2. Numerical Example and Discussion
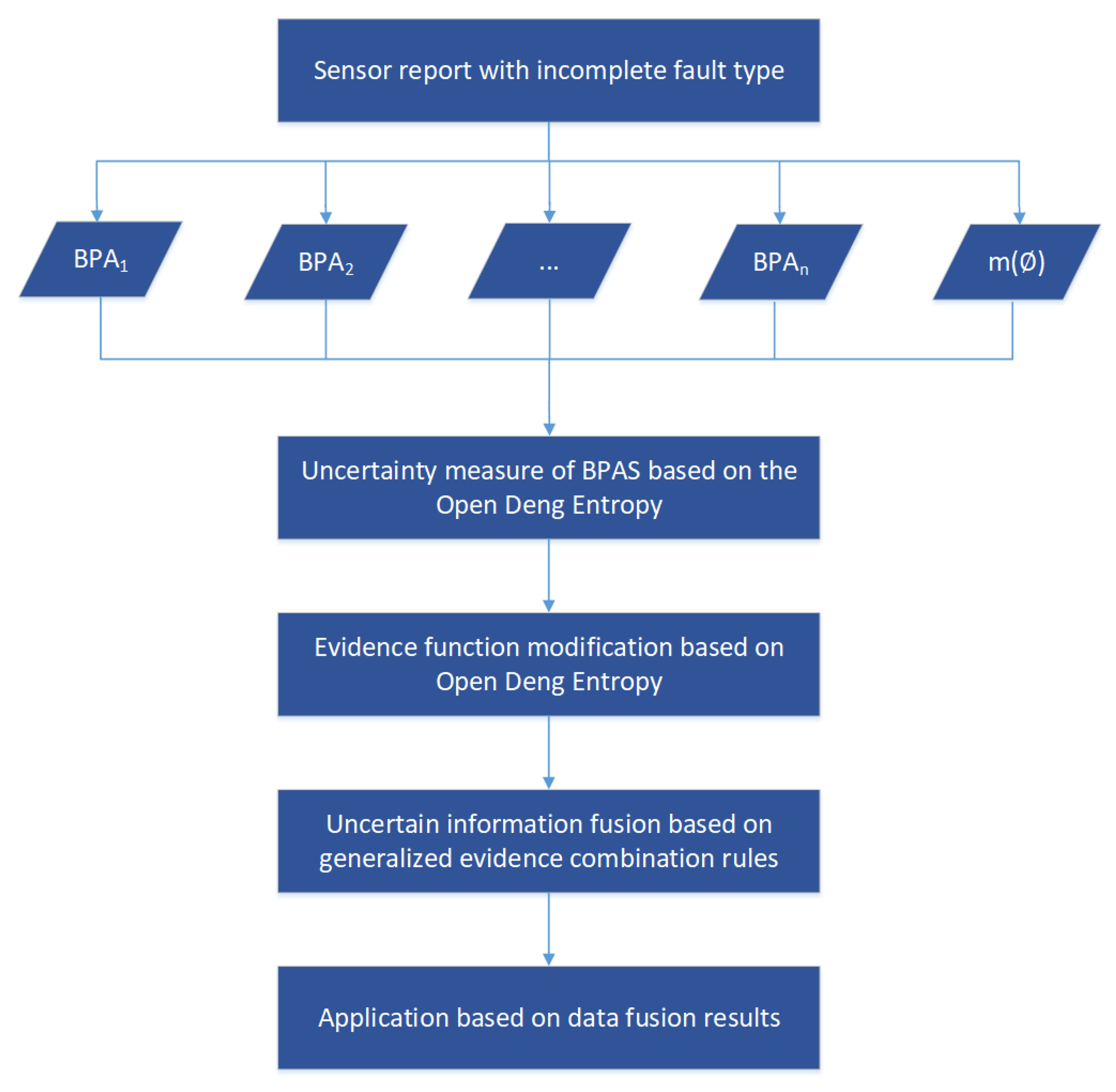
4. Application in Sensor Data Fusion with Incomplete Information
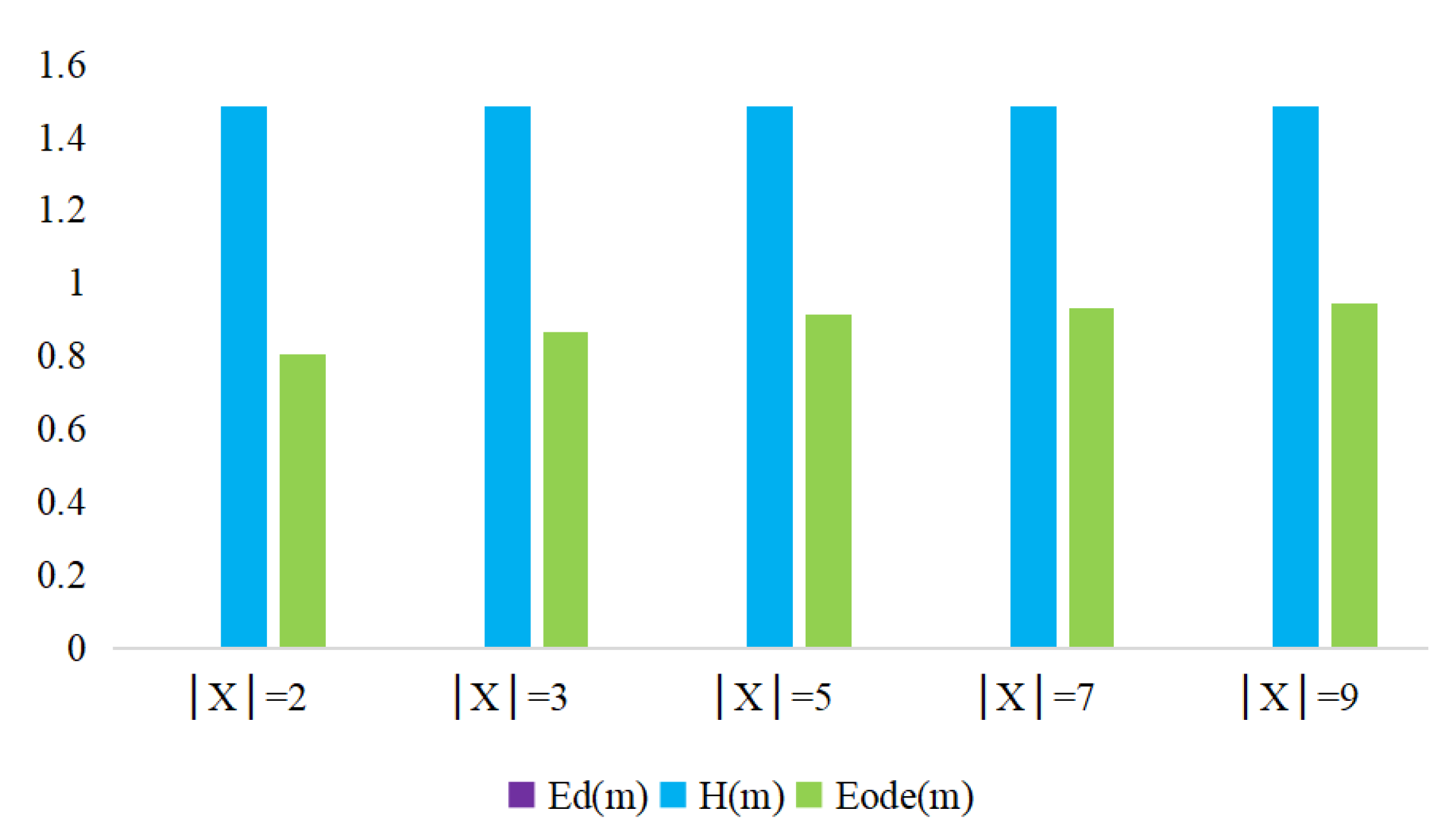
4.1. Uncertainty Measure of BPAs with ODE
4.2. Mass Function Data Modification Based on ODE
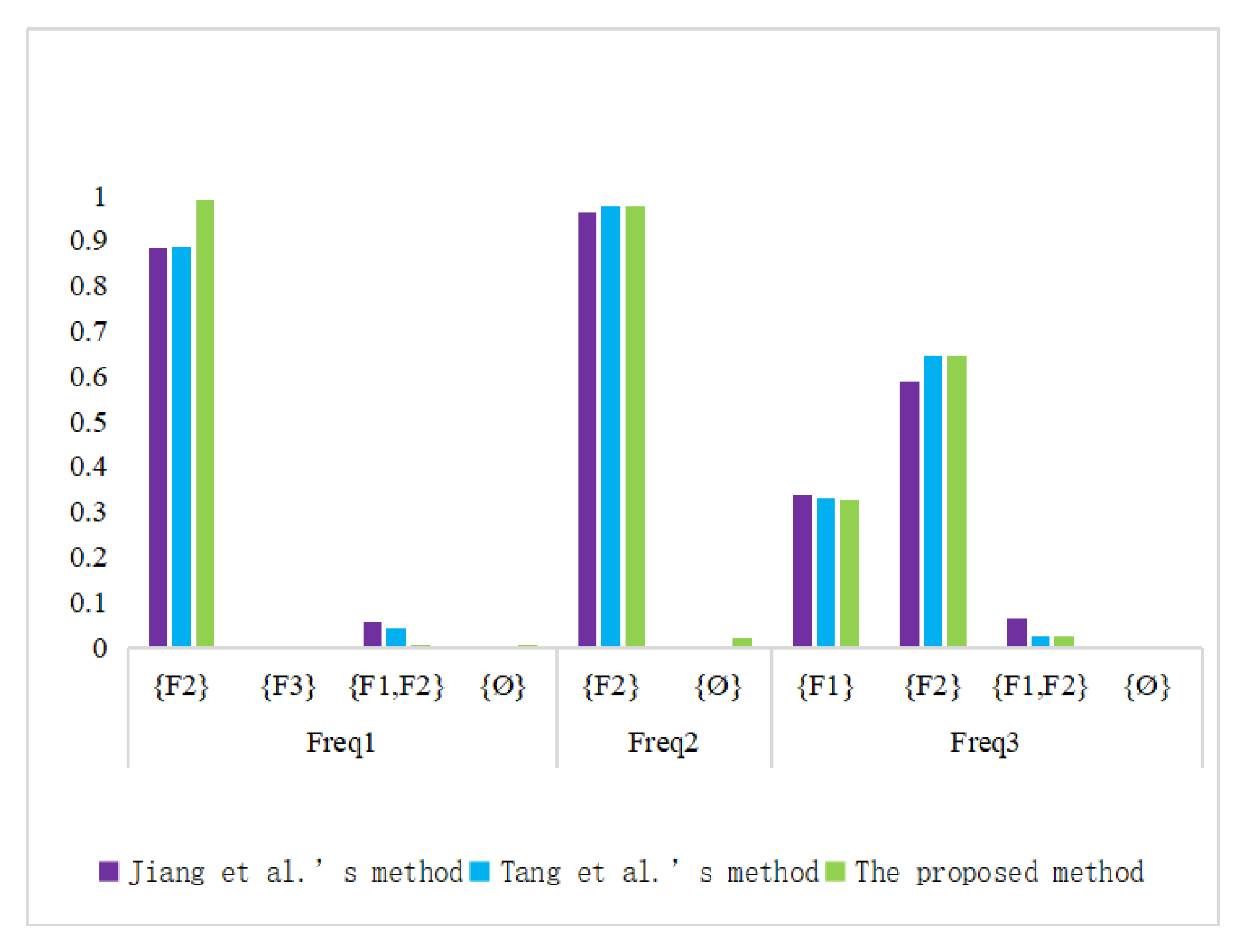
4.3. Data Fusion Based on Generalized Rules of Evidence Combination
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Deng, Z.; Peng, Z.; Qi, W.; Liu, J.; Yuan, G. Sequential covariance intersection fusion Kalman filter. Inf. Sci. 2012, 189, 293–309. [Google Scholar] [CrossRef]
- Dou, Y.; Ran, C.; Gao, Y. Weighted measurement fusion Kalman estimator for multisensor descriptor system. Int. J. Syst. Sci. 2015, 47, 2722–2732. [Google Scholar] [CrossRef]
- Zhou, K.; Martin, A.; Pan, Q.; Liu, Z. SELP: Semi-supervised evidential label propagation algorithm for graph data clustering. Int. J. Approx. Reason. 2018, 92, 139–154. [Google Scholar] [CrossRef]
- Liu, Z.G.; Zhang, Z.; Liu, Y.; Dezert, J.; Pan, Q. A new pattern classification improvement method with local quality matrix based on K-NN. Knowl.-Based Syst. 2019, 164, 336–347. [Google Scholar] [CrossRef]
- Sabahi, F.; Akbarzadeh-T, M.R. Introducing validity in fuzzy probability for judicial decision-making. Int. J. Approx. Reason. 2014, 55, 1383–1403. [Google Scholar] [CrossRef]
- Chan, F.T.S.; Bhagwat, R.; Chan, H.K. The effect of responsiveness of the control-decision system to the performance of FMS. Comput. Ind. Eng. 2014, 72, 32–42. [Google Scholar] [CrossRef]
- Dempster, A.P. Upper and Lower Probabilities Induced by a Multivalued Mapping. Ann. Math. Stat. 1967, 38, 325–339. [Google Scholar] [CrossRef]
- Shafer, G. A Mathematical Theory of Evidence; Princeton University Press: Princeton, NJ, USA, 1976; Volume 42. [Google Scholar]
- Deng, Y. Generalized evidence theory. Appl. Intell. 2015, 43, 530–543. [Google Scholar] [CrossRef]
- Su, X.; Li, L.; Qian, H.; Mahadevan, S.; Deng, Y. A new rule to combine dependent bodies of evidence. Soft Comput. 2019, 23, 9793–9799. [Google Scholar] [CrossRef]
- Jiang, W.; Xie, C.; Zhuang, M.; Tang, Y. Failure mode and effects analysis based on a novel fuzzy evidential method. Appl. Soft Comput. 2017, 57, 672–683. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, Y.; Dezert, J.; Cuzzolin, F. Evidence combination based on credal belief redistribution for pattern classification. IEEE Trans. Fuzzy Syst. 2020, 28, 618–631. [Google Scholar] [CrossRef]
- Meng, J.; Fu, D.; Tang, Y. Belief-peaks clustering based on fuzzy label propagation. Appl. Intell. 2020, 50, 1259–1271. [Google Scholar]
- Fu, C.; Chang, W.; Yang, S. Multiple criteria group decision making based on group satisfaction. Inf. Sci. 2020, 518, 309–329. [Google Scholar] [CrossRef]
- Xiao, F. A multiple-criteria decision-making method based on D numbers and belief entropy. Int. J. Fuzzy Syst. 2019, 21, 1144–1153. [Google Scholar] [CrossRef]
- Deng, X.; Jiang, W. An evidential axiomatic design approach for decision making using the evaluation of belief structure satisfaction to uncertain target values. Int. J. Intell. Syst. 2018, 33, 15–32. [Google Scholar] [CrossRef]
- Song, Y.; Wang, X.; Wu, W.; Quan, W.; Huang, W. Evidence combination based on credibility and non-specificity. Pattern Anal. Appl. 2018, 21, 167–180. [Google Scholar] [CrossRef]
- Li, R.; Li, H.; Tang, Y. An improved method to manage conflict data using elementary belief assignment function in the evidence theory. IEEE Access 2020, 8, 37926–37932. [Google Scholar] [CrossRef]
- Dubois, D.; Liu, W.; Ma, J.; Prade, H. The basic principles of uncertain information fusion. An organised review of merging rules in different representation frameworks. Inf. Fusion 2016, 32, 12–39. [Google Scholar] [CrossRef]
- Jing, M.; Tang, Y. A new base basic probability assignment approach for conflict data fusion in the evidence theory. Appl. Intell. 2020. [Google Scholar] [CrossRef]
- Cao, S.; Dehmer, M. Degree-based entropies of networks revisited. Appl. Math. Comput. 2015, 261, 141–147. [Google Scholar] [CrossRef]
- Xie, W.; Schultz, M.D.; Lister, R.; Hou, Z.; Rajagopal, N.; Ray, P.; Whitaker, J.W.; Tian, S.; Hawkins, R.D.; Leung, D.; et al. Epigenomic analysis of multilineage differentiation of human embryonic stem Cells. Cell 2013, 153, 1134–1148. [Google Scholar] [CrossRef] [PubMed]
- Jan, N.; Zedam, L.; Mahmood, T.; Rak, E.; Ali, Z. Generalized dice similarity measures for q-rung orthopair fuzzy sets with applications. Complex Intell. Syst. 2020. [Google Scholar] [CrossRef]
- Garg, H.; Kumar, K. A novel possibility measure to interval-valued intuitionistic fuzzy set using connection number of set pair analysis and its applications. Neuraln Comput. Appl. 2020, 32, 3337–3348. [Google Scholar] [CrossRef]
- Ullah, K.; Mahmood, T.; Ali, Z.; Jan, N. On some distance measures of complex Pythagorean fuzzy sets and their applications in pattern recognition. Complex Intell. Syst. 2020, 6, 15–27. [Google Scholar] [CrossRef]
- Zedam, L.; Bouremel, H.; De Baets, B. Left- and right-compatibility of order relations and fuzzy tolerance relations. Fuzzy Sets Syst. 2019, 360, 65–81. [Google Scholar] [CrossRef]
- Garg, H.; Kumar, K. Group decision making approach based on possibility degree measure under linguistic interval-valued intuitionistic fuzzy set environment. J. Ind. Manag. Optim. 2020, 16, 445–467. [Google Scholar] [CrossRef]
- Athira, T.M.; John, S.J.; Garg, H. A novel entropy measure of Pythagorean fuzzy soft sets. Aims Math. 2020, 5, 1050–1061. [Google Scholar] [CrossRef]
- Li, Y.; Garg, H.; Deng, Y. A new uncertainty measure of discrete z-numbers. Int. J. Fuzzy Syst. 2020, 22, 760–776. [Google Scholar] [CrossRef]
- Yager, R.R. Entropy and specificity in a mathematical theory of evidence. Int. J. Gen. Syst. 1983, 9, 291–310. [Google Scholar] [CrossRef]
- Deng, Y. Deng entropy. Chaos Solitons Fractals 2016, 91, 549–553. [Google Scholar] [CrossRef]
- Kang, B.; Deng, Y. The maximum Deng entropy. IEEE Access 2019, 7, 120758–120765. [Google Scholar] [CrossRef]
- Qin, M.; Tang, Y.; Wen, J. An improved total uncertainty measure in the evidence theory and its application in decision making. Entropy 2020, 22, 487. [Google Scholar] [CrossRef]
- Zhou, D.; Tang, Y.; Jiang, W. A modified belief entropy in Dempster-Shafer framework. PLoS ONE 2017, 12, e0176832. [Google Scholar] [CrossRef] [PubMed]
- Cui, H.; Liu, Q.; Zhang, J.; Kang, B. An improved Deng entropy and its application in pattern recognition. IEEE Access 2019, 7, 18284–18292. [Google Scholar] [CrossRef]
- Zheng, H.; Tang, Y. A novel failure mode and effects analysis model using triangular distribution-based basic probability assignment in the evidence theory. IEEE Access 2020, 8, 66813–66827. [Google Scholar] [CrossRef]
- Wu, D.; Tang, Y. An improved failure mode and effects analysis method based on uncertainty measure in the evidence theory. Qual. Reliab. Eng. Int. 2020, 36, 1786–1807. [Google Scholar] [CrossRef]
- Zheng, H.; Tang, Y. Deng entropy weighted risk priority number model for failure mode and effects analysis. Entropy 2020, 22, 280. [Google Scholar] [CrossRef]
- Xiao, F. Multi-sensor data fusion based on the belief divergence measure of evidences and the belief entropy. Inf. Fusion 2019, 46, 23–32. [Google Scholar] [CrossRef]
- Jirousek, R.; Shenoy, P.P. A new definition of entropy of belief functions in the Dempster–Shafer theory. Int. J. Approx. Reason. 2018, 92, 49–65. [Google Scholar] [CrossRef]
- Tang, Y.; Zhou, D.; Chan, F.T.S. An extension to Deng’s entropy in the open world assumption with an application in sensor data fusion. Sensors 2018, 18, 1902. [Google Scholar] [CrossRef]
- Zhou, X.; Tang, Y. A note on incomplete information modeling in the evidence theory. IEEE Access 2019, 7, 166410–166414. [Google Scholar] [CrossRef]
- Shannon, C.E. A mathematical theory of communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef]
- Abellán, J. Analyzing properties of Deng entropy in the theory of evidence. Chaos Solitons Fractals 2017, 95, 195–199. [Google Scholar] [CrossRef]
- Moral-García, S.; Abellán, J. Critique of modified Deng entropies under the evidence theory. Chaos Solitons Fractals 2020, 140, 110112. [Google Scholar]
- Jiang, W.; Xie, C.; Zhuang, M.; Shou, Y.; Tang, Y. Sensor data fusion with z-numbers and its application in fault iagnosis. Sensors 2016, 16, 1509. [Google Scholar] [CrossRef]
- Tang, Y.; Zhou, D.; He, Z.; Xu, S. An improved belief entropy-based uncertainty management approach for sensor data fusion. Int. J. Distrib. Sens. Netw. 2017, 13, 155014771771849. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Uncertainty Measure | |||||
|---|---|---|---|---|---|
| - | - | - | - | - | |
| 1.4855 | 1.4855 | 1.4855 | 1.4855 | 1.4855 | |
| 0.8051 | 0.8653 | 0.9133 | 0.9340 | 0.9454 |
| ∅ | ∅ | ∅ | ||||||||||
| 0.8176 | 0.0003 | 0.1553 | 0.0268 | 0.6229 | 0.3771 | 0.3666 | 0.4563 | 0.1185 | 0.0586 | |||
| 0.5658 | 0.0009 | 0.0646 | 0.3687 | 0.7660 | 0.2341 | 0.2793 | 0.4151 | 0.2652 | 0.0404 | |||
| 0.2403 | 0.0004 | 0.0141 | 0.7452 | 0.8598 | 0.1402 | 0.2897 | 0.4331 | 0.2470 | 0.0302 | |||
| 0.8919 | 0.3124 | 1.5732 | |
| 0.7198 | 0.2084 | 1.9500 | |
| 0.5166 | 0.1294 | 1.9164 |
| 0.4191 | 0.4805 | 0.2892 | |
| 0.3382 | 0.3205 | 0.3585 | |
| 0.2427 | 0.1990 | 0.3523 |
| ∅ | ∅ | ∅ | ||||||||||
| 0.5923 | 0.0005 | 0.0904 | 0.3201 | 0.7159 | 0.2841 | 0.3082 | 0.4334 | 0.2164 | 0.0420 | |||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, B.; Gan, D.; Tang, Y.; Lei, Y. Incomplete Information Management Using an Improved Belief Entropy in Dempster-Shafer Evidence Theory. Entropy 2020, 22, 993. https://doi.org/10.3390/e22090993
Yang B, Gan D, Tang Y, Lei Y. Incomplete Information Management Using an Improved Belief Entropy in Dempster-Shafer Evidence Theory. Entropy. 2020; 22(9):993. https://doi.org/10.3390/e22090993
Chicago/Turabian StyleYang, Bin, Dingyi Gan, Yongchuan Tang, and Yan Lei. 2020. "Incomplete Information Management Using an Improved Belief Entropy in Dempster-Shafer Evidence Theory" Entropy 22, no. 9: 993. https://doi.org/10.3390/e22090993
APA StyleYang, B., Gan, D., Tang, Y., & Lei, Y. (2020). Incomplete Information Management Using an Improved Belief Entropy in Dempster-Shafer Evidence Theory. Entropy, 22(9), 993. https://doi.org/10.3390/e22090993