1. Introduction
The Li-ion battery has been proven to be a promising candidate to substitute other energy storage batteries as the power source in space stations [
1,
2,
3] owing to its merits of high power density, high single voltage, long cycling life, environmental friendliness, large operating temperature ranges and so on [
4,
5,
6]. The operation performance of the Li-ion battery array greatly depends on its operating temperature and temperature uniformity. An improper operating temperature may contribute to the reduction in charging efficiency and service life of the batteries [
7,
8]. Further, an uneven temperature distribution of the single cells may potentially decrease the pack capacity and cause serious safety problems [
9]. Accordingly, the battery thermal management system has become an essential approach to enhance the performance of the batteries effectively.
The battery thermal management system has been investigated actively where different cooling technologies, namely air cooling, liquid cooling, heat pipe cooling, and phase change material cooling, were adopted. The air cooling approach [
10,
11] is classified into natural convection and forced air convection, and the latter is widely researched because of its high convective heat transfer coefficient. The heat pipe cooling [
12,
13] achieves heat transfer from the heat source to the cooling end to lower the battery array’s temperatur and is largely used in electrical devices for its high effective conductivity. As to the phase change material cooling method, the latent heat of the batteries is stored in the phase change material as the phase changes over a small temperature range, thereby the temperature rise inside the battery can be reduced [
14,
15]. When confronting more complicated configurations, especially in the case of a large-size high-rate discharging battery array [
16], liquid cooling thermal management could manifest better performances than other methods. Furthermore, due to its advantages of strong heat dissipation ability, gravity immunity, structural simplicity, technological maturity, etc., the single-phase fluid loop is regarded as the most promising active approach for Li-ion battery thermal management in space stations.
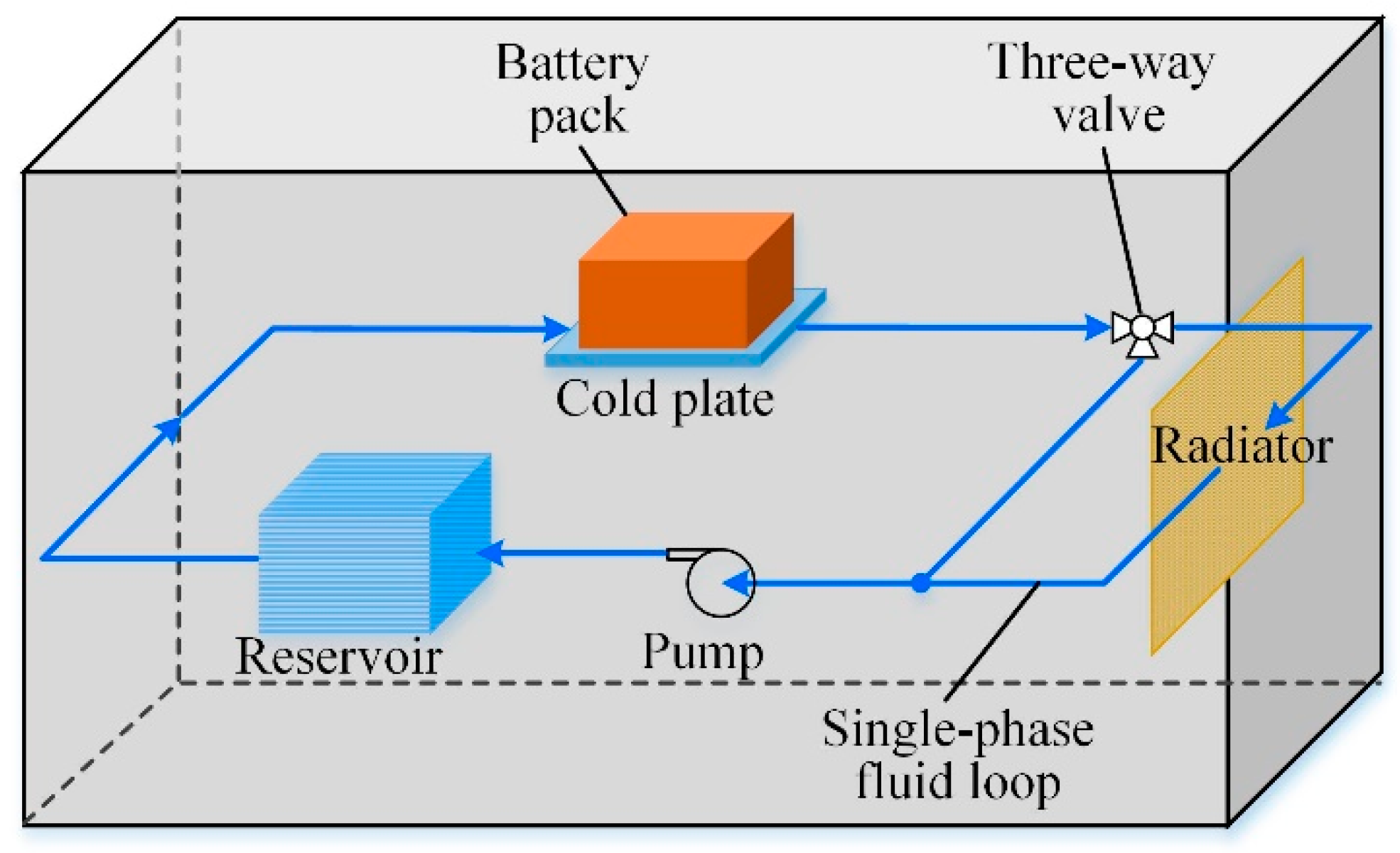
The conventional strategy of the single-phase fluid loop for the space batteries [
17] is shown in
Figure 1. It comprises of the cold plate (CP), radiator, pump, reservoir and three-way valve. It is shown that the onboard vacuum packaged battery array is cascaded into a single-phase fluid cooling cycle system via a CP. The CP is applied for absorbing the heat generated inside the batteries and the coolant flowing through is for transporting heat to the radiator by which the heat is dissipated to the outer space. To balance the flow through the bypass line and the main fluidic line linking to the radiator, a three-way valve is used by adjusting the valve opening factor between 0% and 100%, through which the coolant temperature can be regulated. The reservoir collects the coolant flowing from the bypass line and the main line for the next cooling cycle, and acts as coolant supplement for the fluid loop when necessary. Undertaking a variety of works, including flow management, heat transfer and energy conversion, etc., the CP is considered to be the key component of the battery liquid cooling system on account of its compactness and ability to separate the battery and fluid [
18,
19,
20].
Much attention has been devoted to the performance improvement of the CP. Yamada et al. [
21] developed a honeycomb-cord CP that can obtain a remarkable mass decrease without lowering heat removal capability. Wang et al. [
22] designed a silica-plates based cooling system for prismatic lithium-ion batteries during fast charging-discharging process and in specific operating conditions. Jarrett et al. [
23] proposed a serpentine-channel CP for the battery liquid cooling system and assessed the effect from the geometry of the channels. The numerical results indicate that with the optimum design, both pressure drop and average temperature can be decreased, but at the expense of temperature uniformity. Wang et al. [
24] presented an advanced single phase actively-pumped fluid loop using distributed thermal control strategy applied in spacecraft thermal control system, which included a self-driven CP and a paraffin-actuated thermal control valve. This self-driven control system not only simplified the structure of the conventional mechanically pumped fluid loop effectively, but also improved the operation economy significantly.
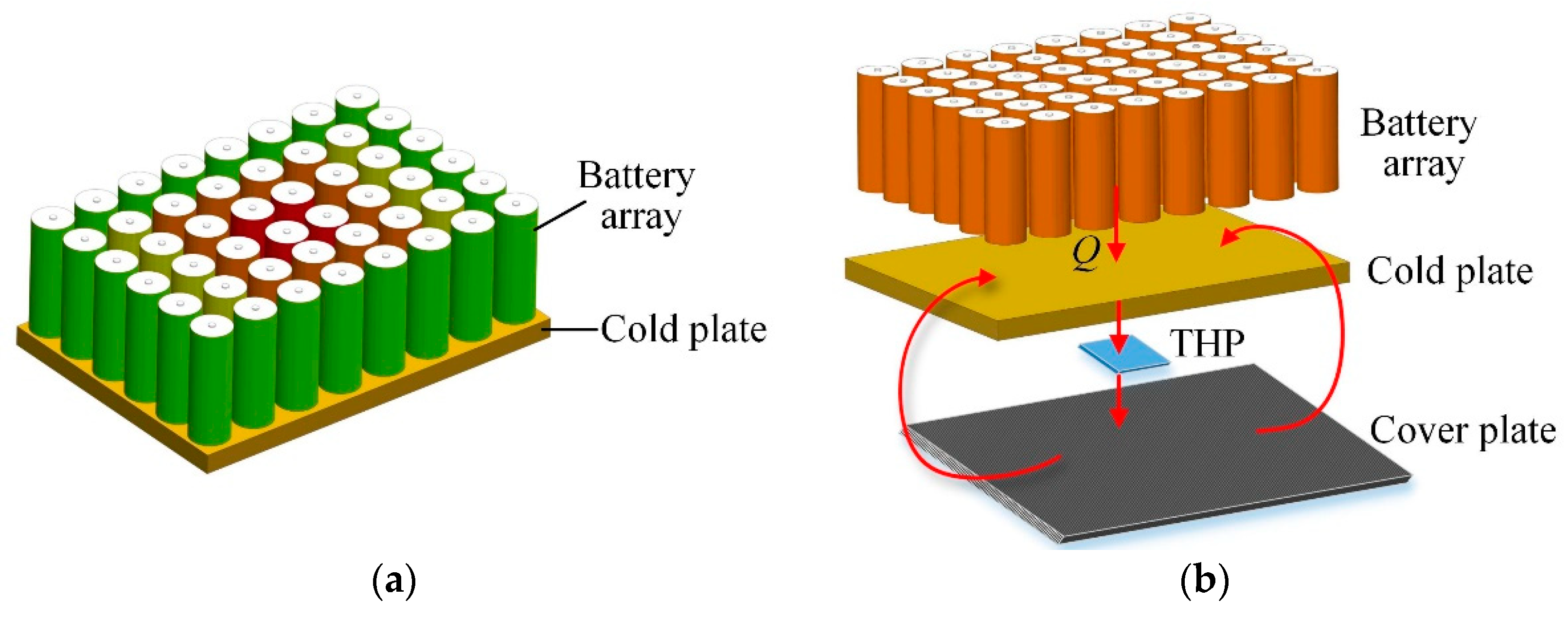
However, few studies focused on the dynamic adjustment of the cooling ability of CP’s different locations which is benefit for the improvement of the overall space battery’s temperature uniformity. As the structure of the CP is fixed, it is difficult to adjust the cooling capacity of the different locations of the CP dynamically which may cause the overheating area or undercooling area. Accordingly, this can directly lead to large temperature difference inside the cells, which is unfavorable for the reliability and capacity utilization of the battery array. As shown in
Figure 2a, the temperature of the cells in the middle of the array is much higher than that of the cells on the edge of the CP, which can result in severe temperature unevenness of the power-cell-array and performance degradations or operating failures eventually. Therefore, it is urgent to investigate how to improve the temperature uniformity of the power-cell-array.
To achieve the dynamic cooling ability regulation of different locations of the CP, a thermoelectric heat pump (THP) and a high-heat-conductivity cover plate are employed in this study. Due to the small size, fast cooling speed, no environment pollution, and control simplicity, THPs have been extensively used in the temperature management system [
25,
26,
27]. Traditionally, the cold side of the THP is attached to the cooling object and the hot side of THP the heat sink, which means that the cold-side temperature is usually the only variable can be controlled. The transferred heat in the hot-side heat is dissipated to the external environment space [
28,
29,
30,
31]. Nevertheless, different from conventional THP applications, the THP in
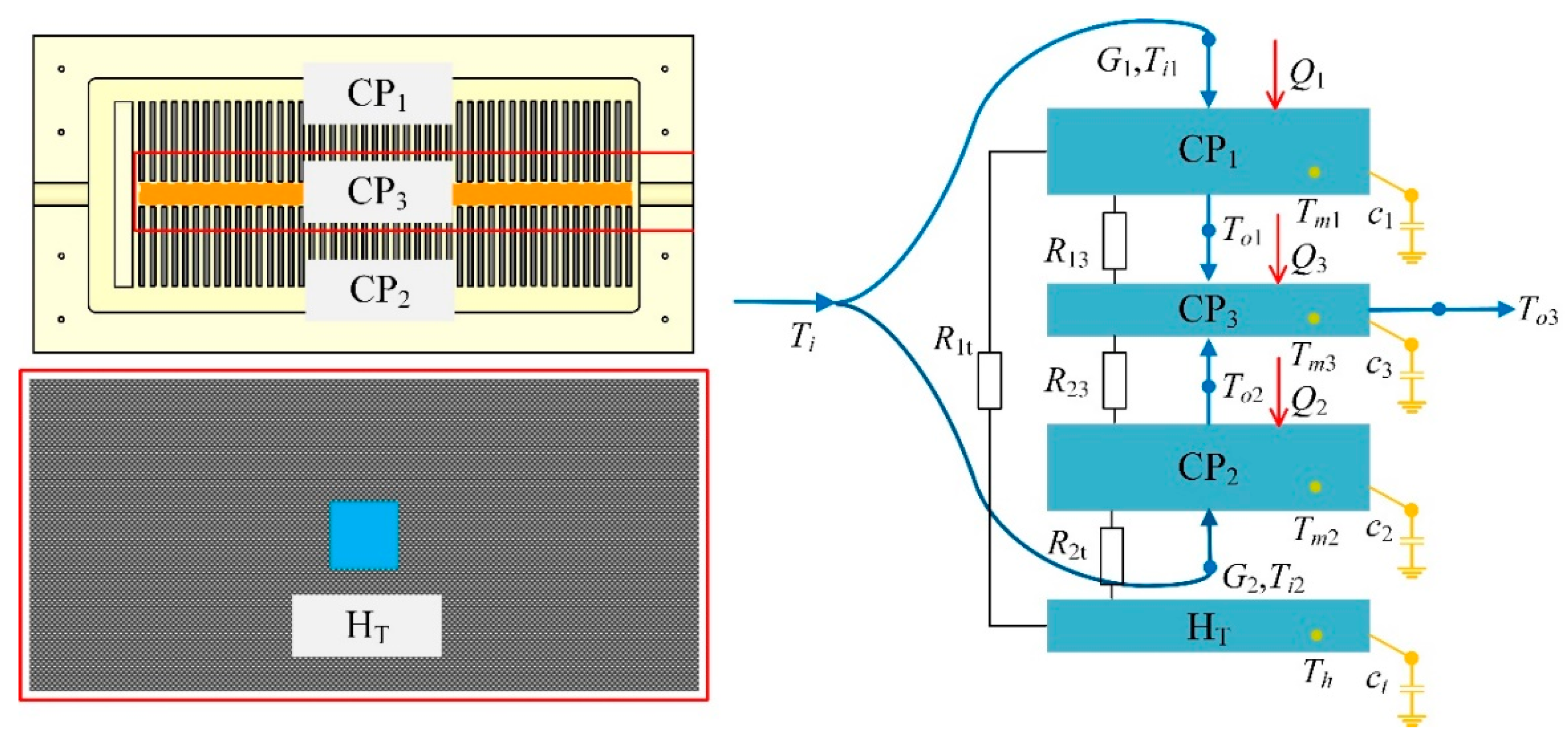
Figure 2b functions as an effective heat transfer medium through which the heat can be transferred from the high temperature zone to the cover plate firstly. Then the accumulated heat in the cover plate is transferred to the low temperature zone of the CP through heat conduction. Through the function of the THP, the cooling ability of the different locations of the CP can be adjusted dynamically and the temperature uniformity of the power-cell-array can be enhanced notably.
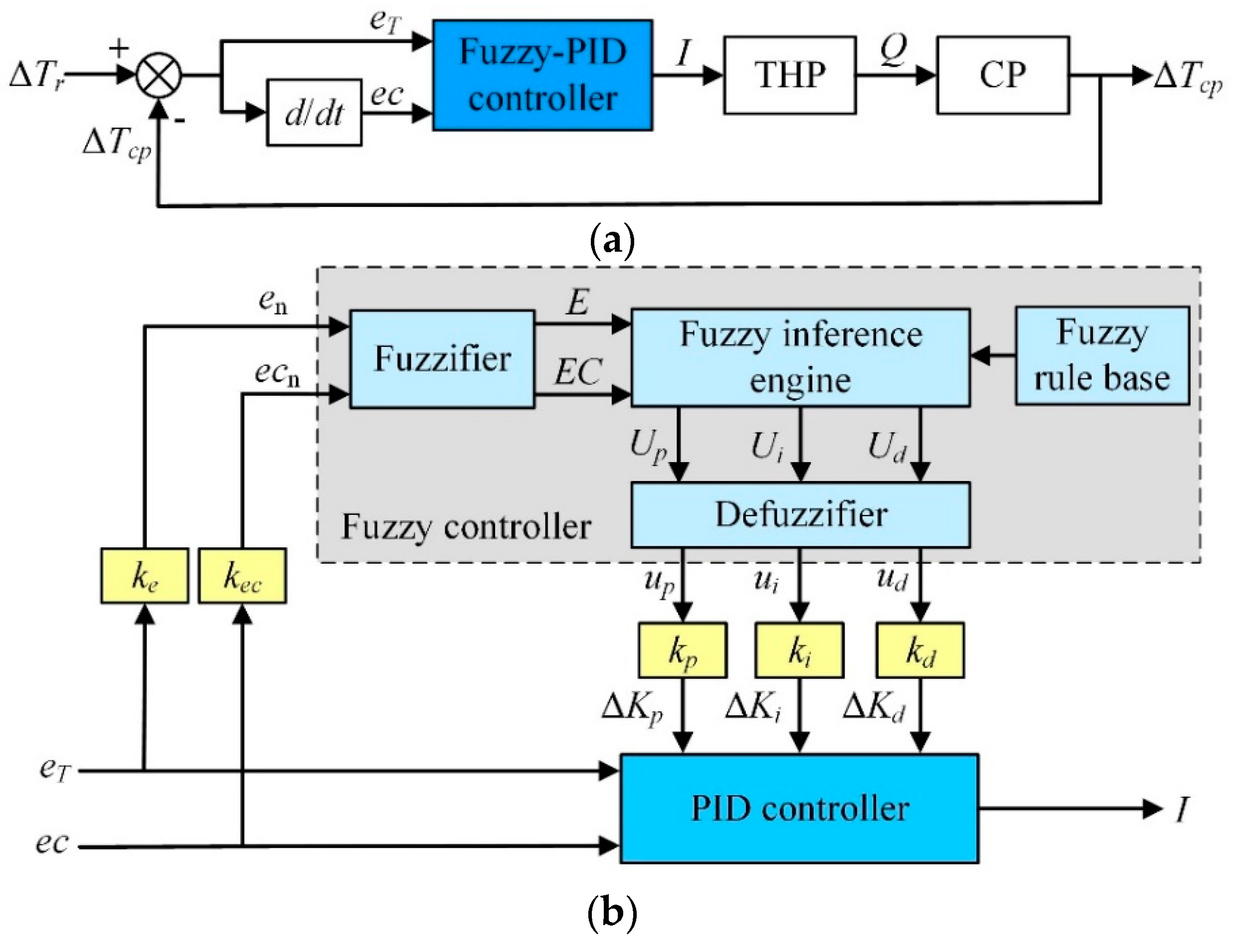
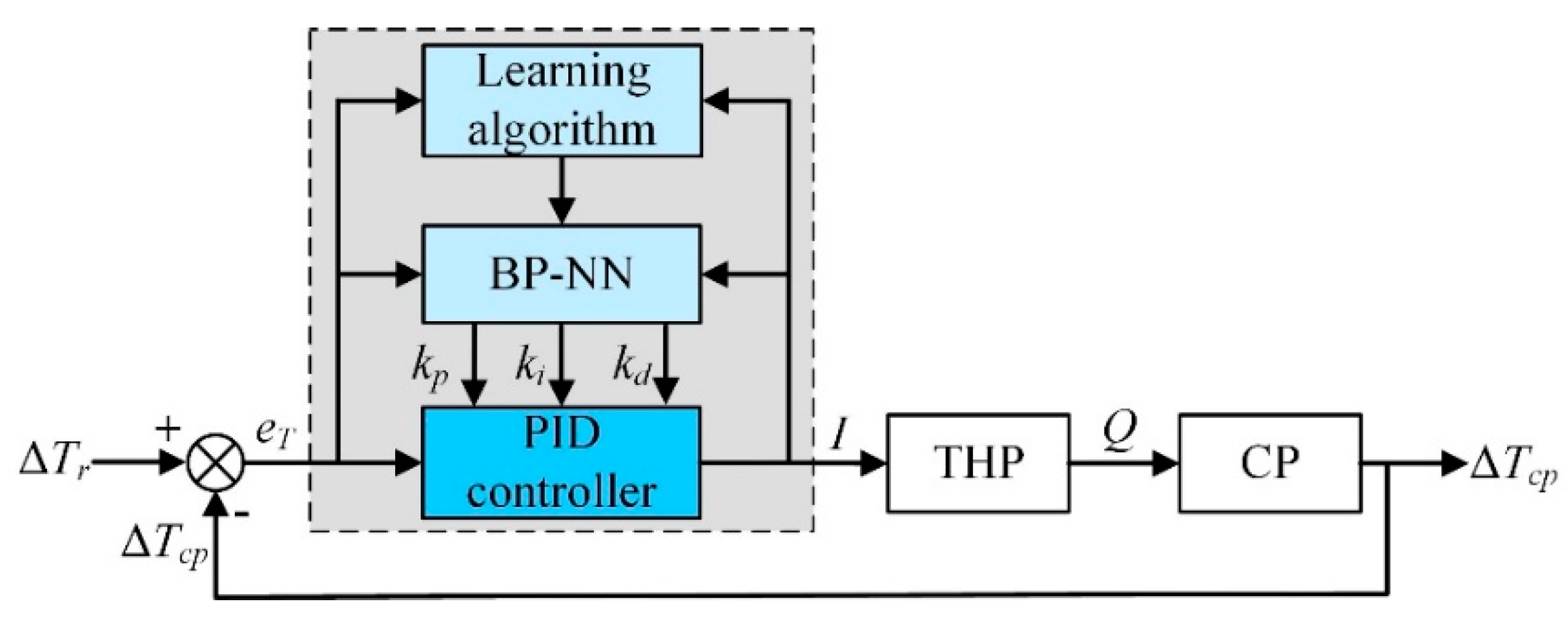
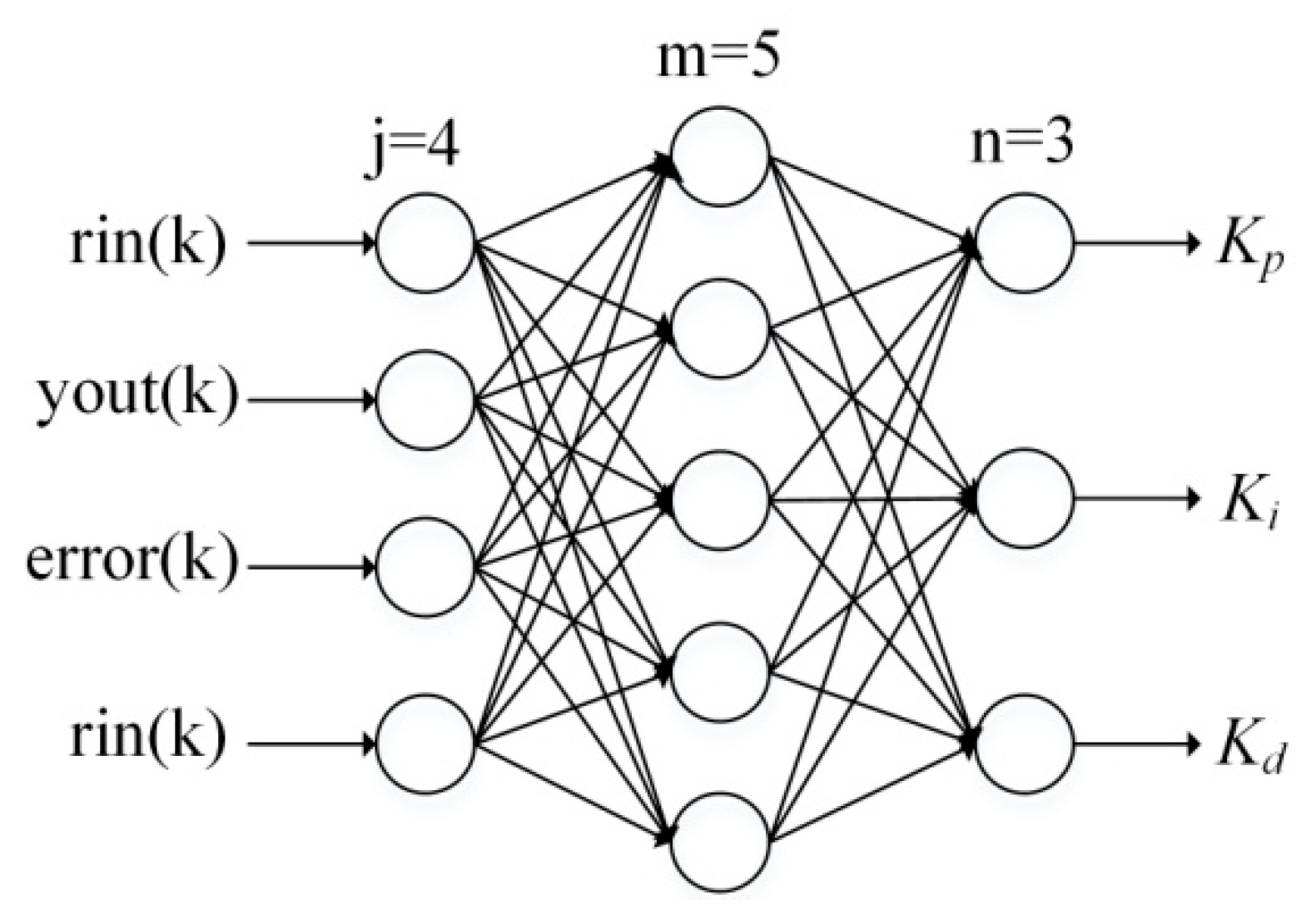
In this paper, an active temperature uniformity control strategy of a novel combined CP-THP system (CCTS) is proposed to improve the temperature uniformity of the CP and finally, the Li-ion space array. A dynamic heat transfer model for the CCTS based on the lumped-parameter method is established. Simulation analyses are conducted to investigate the impacts of the heat load and THP’s electric current on the thermal characteristics of the CP. Three different controllers, namely the basic PID controller, fuzzy-PID controller, and BP-PID controller, are designed to manipulate the CP’s temperature difference by adjusting the electric current passing through the THP. With this THP-based active control strategy, CP’s maximum temperature difference can be decreased, and the temperature uniformity can be improved evidently, which implies that the temperature unevenness of the power-cell-array can be alleviated effectively as well. For further verification, relevant experiments have been conducted and the experimental work will be published in our subsequent paper.
4. Closed-Loop Control Effect Analyses
In this section, the CCTS with three controllers, which are Basic PID, fuzzy-PID, and BP-PID controllers, responses to a variety of disturbances in the thermal load for closed-loop simulation. The results under these three control strategies, which examine the closed-loop control effects, are compared from the parameters such as overshoot, settling time, and steady-state error.
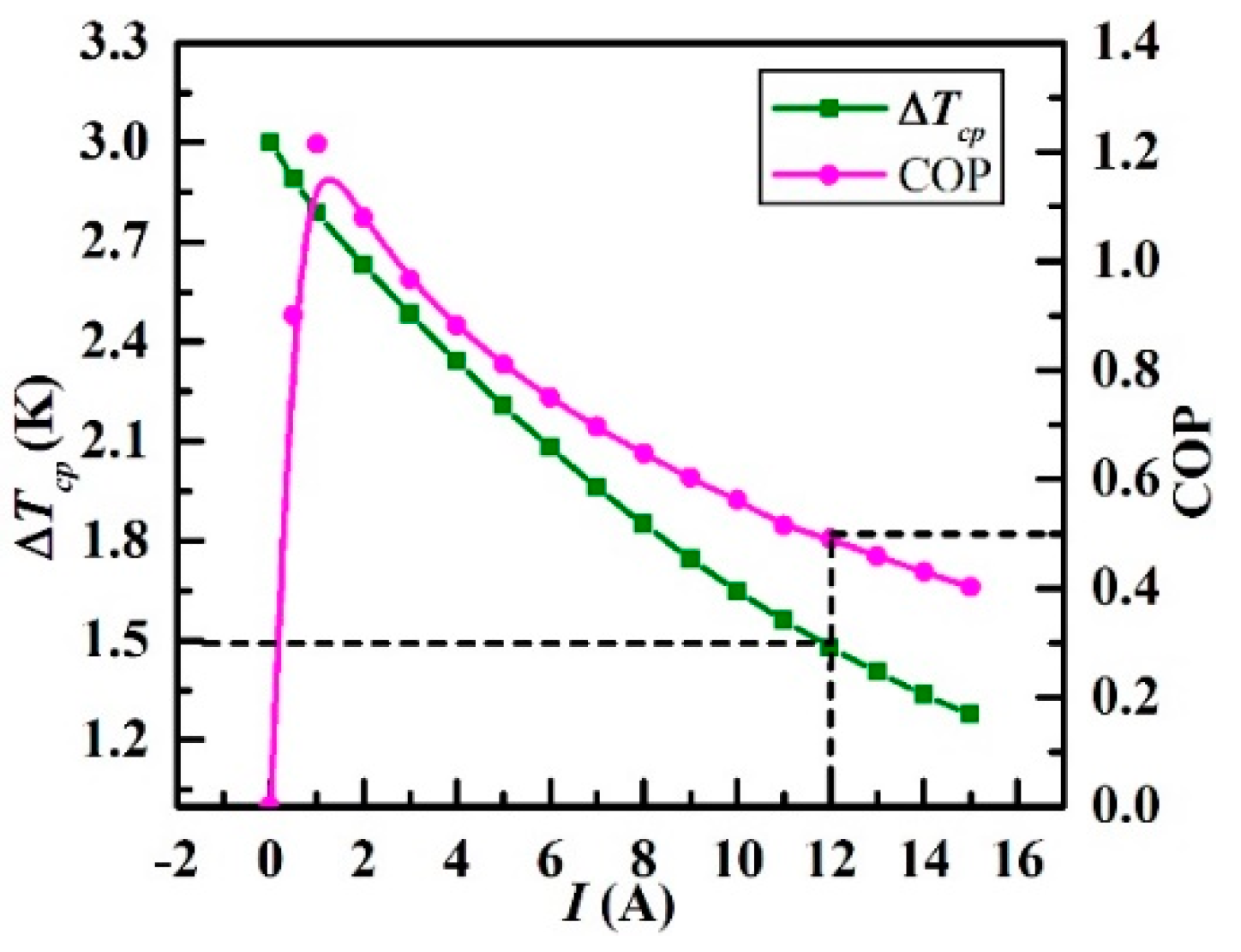
Notice that the desired temperature difference ∆
Tr in the closed loop is set to be 1.5 K in this study in that when operated under the current of 12 A as stated in
Section 3.3, Δ
Tcp was reduced by 1.5 K (from 3 K to 1.5 K). For simplicity, the dynamic temperature difference responses to manipulations from basic PID controller, fuzzy-PID controller, and BP-PID controller are defined as ∆
Tcp_PID, ∆
Tcp_F and ∆
Tcp_BP respectively.
4.1. Step Disturbance Response
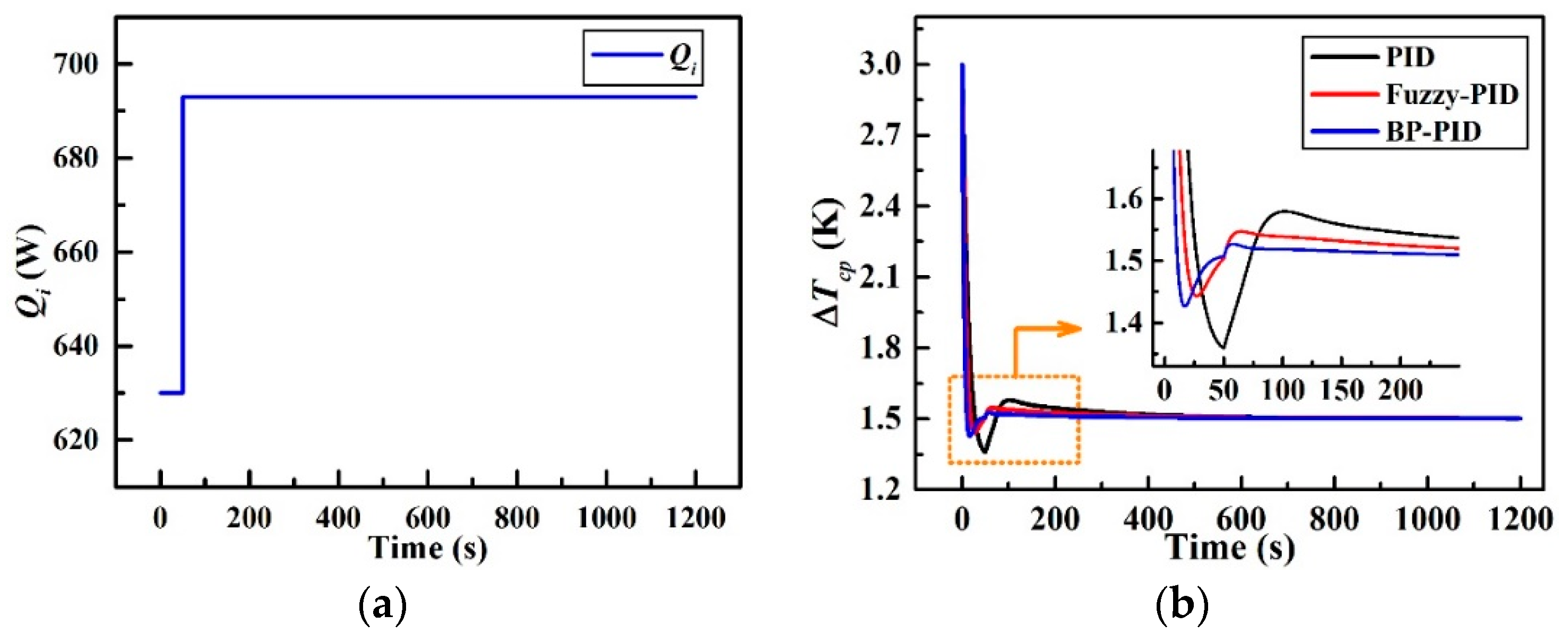
The dynamic temperature difference responses to a 10% step increase in the input heat load
Qi to the CCTS are plotted in
Figure 15. As mentioned in
Section 3.1, ∆
Tcp will climb and settle to a new steady-state value of 3.3 K (0.3 K higher than initial 3 K) without closed-loop control under a +10% step-disturbance in the heat load
Qi at 50 s. As shown in
Figure 15b, all the three controllers achieve the objective of 1.5 K. However, there are several specific differences in the control effects among these three control strategies. The closed-loop overshoots
γ, settling time
τ, and steady-state errors
δ of the simulated transients are summarized in
Table 6. The overshoot, settling time, and steady-state error of the basic PID controller are calculated to be 9.4% (0.14 K), 68 s and 0.426% (0.006 K) respectively as a reference for the comparison. Obviously, the fuzzy-PID controller and BP-PID controller offer a much better temperature dynamic performance than the reference. The overshoot of ∆
Tcp_F is reduced to 39.1% compared with that of ∆
Tcp_PID, and the settling time in ∆
Tcp_F is shortened by 52 s compared with that of ∆
Tcp_PID. The overshoot of ∆
Tcp_BP is reduced to 52.4% compared with that of ∆
Tcp_PID, and the settling time is accelerated by 58 s compared with that of ∆
Tcp_PID. Besides, the steady-state errors of both ∆
Tcp_F and ∆
Tcp_BP are all sufficiently small which can be neglected according to the values in
Table 6. Generally, BP-PID controller is better than fuzzy-PID controller from the perspective of the response rate and system stability. In contrast, the latter performs better from the perspective of the maximum overshoot.
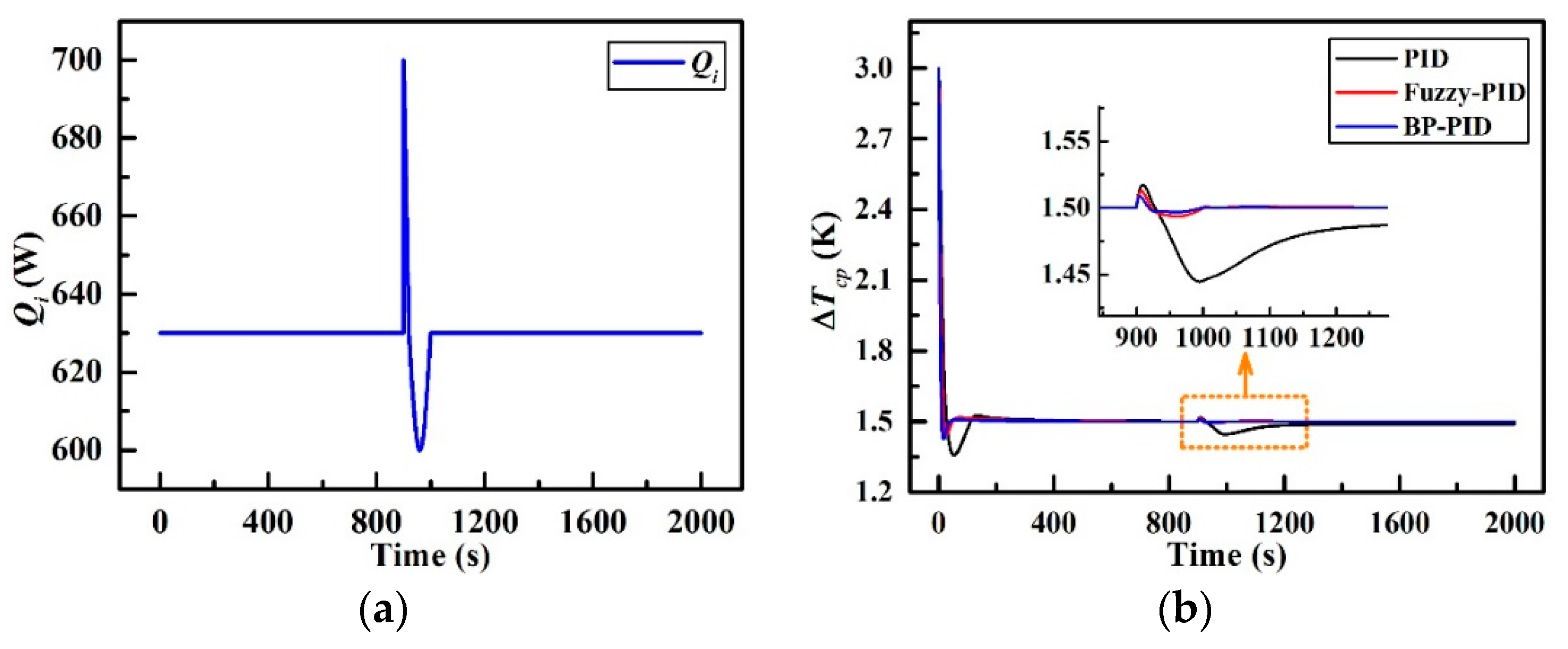
4.2. External Disturbance Response
The transient responses of the temperature difference to an unfavorable external disturbance in
Qi are depicted in
Figure 16. It can be viewed from
Figure 16a that there is a sharp wave pulse disturbance and a half-sinusoid pulse disturbance in the heat load brought from battery cells within 900–1000 s, which may be attributed to the abrupt change in the discharge rate of the Li-ion batteries [
32,
33,
34]. The peak of the sharp wave pulse is 700 W at 900 s and the valley of the half-sinusoid pulse is 600 W at 960 s. As shown in
Figure 16b, once the disturbance occurs at 900 s, ∆
Tcp_PID manifests a fluctuation (maximum overshoot of 0.017 K at 909 s) to the sharp pulse at first and then, a major oscillation (maximum overshoot of 0.055 K at 995 s) to the half-sinusoid pulse, followed by a slow returning at 1000–1300 s. ∆
Tcp_F and ∆
Tcp_BP, nevertheless, display just a tiny fluctuation (maximal overshoot of 0.012 K at 907 s and 0.008 K at 905 s respectively) to the sharp pulse with a shorter returning time (20 s and 18 s respectively). In addition, there are no significant responses to the half-sinusoid pulse for these latter two control strategies. The corresponding parameters are listed in
Table 7. ∆
Tcp_F manifests the least maximum overshoot which is 3.81% (0.06 K) while ∆
Tcp_BP provides the fastest settling time of 10 s compared with that of the other two. With regard to the steady-state performance, the steady-state errors of ∆
Tcp_F and ∆
Tcp_BP are both infinitesimally small, and so can be ignored. Therefore, it can be concluded that the fuzzy-PID controller and BP-PID controller present better temperature dynamic ability in responding to unexpected external disturbances as compared to the basic PID controller.
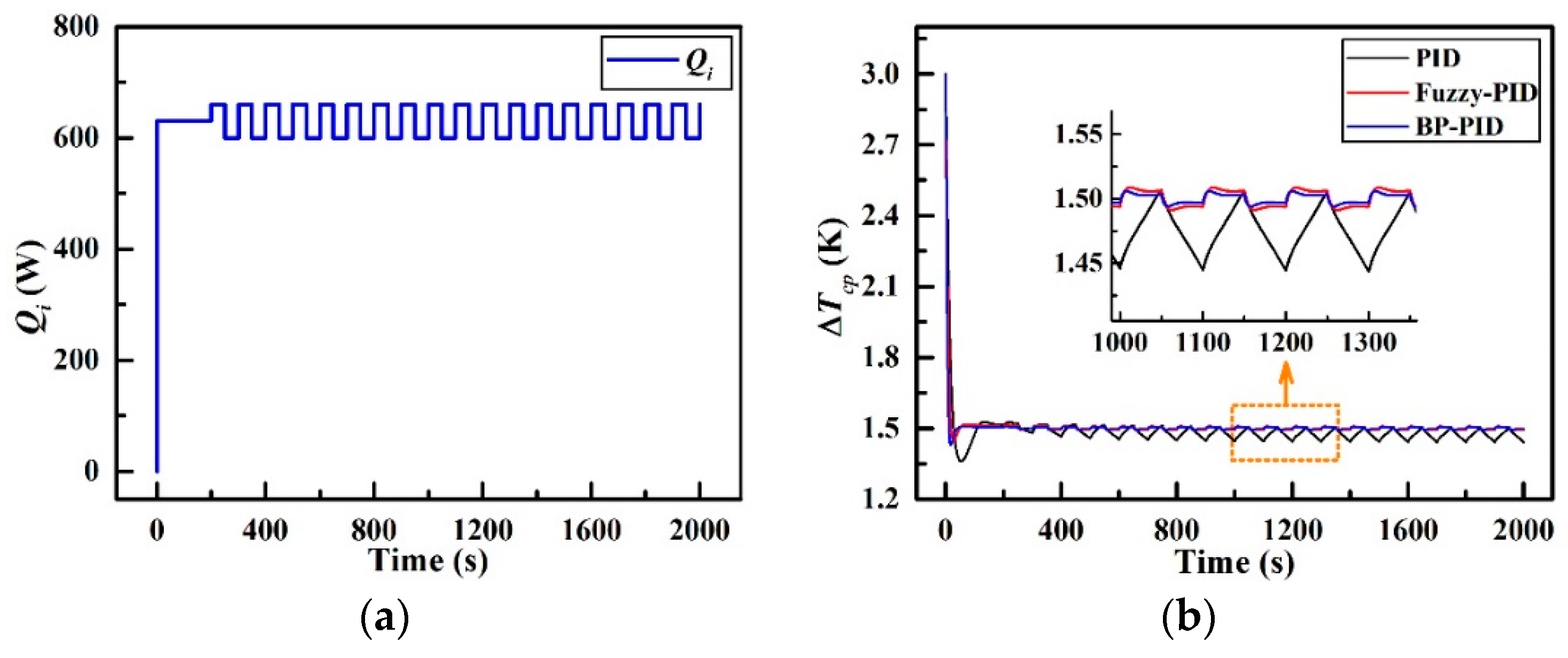
4.3. Periodic Disturbance Response
Figure 17 presents the dynamic temperature difference responses to a periodic disturbance in
Qi. As revealed in
Figure 17a, the periodic disturbance in
Qi is simulated in the form of a central constant value of 630 W at the first 200 s and a square wave pulse with high level of 660 W and low level of 600 W respectively after 200 s. The results can be found from
Figure 17b that ∆
Tcp_PID fluctuates within 4% of its steady-state value (the absolute overshoot is 0.06 K) with the settling time of 84 s, while ∆
Tcp_F fluctuates within 0.53% of its steady-state value (the absolute overshoot is 0.008 K) with the settling time of 16 s. Further, ∆
Tcp_BP reaches an equilibrium after 10 s with a merely 0.4% fluctuation of its steady-state value (the absolute overshoot is 0.006 K). Additionally, the maximum overshoots of these three controllers are 9.31% (at 53 s), 3.6% (at 27 s), and 4.7% (at 17 s) respectively, and the settling times are 84 s, 16 s and 10 s respectively. All the parameters above can be referred to
Table 8 for comparison. The observations suggest that when experiencing a periodical disturbance in the heat load, both fuzzy-PID controller and BP-PID controller still manifest fast response ability and strong self-adaptability as previously expected.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}