1. Introduction
The Einstein–Podolsky–Rosen (EPR) steering [
1] depicts one of the most striking features in quantum mechanics: With local measurements, one can steer or prepare a certain state on a remote physical system without even accessing it [
2,
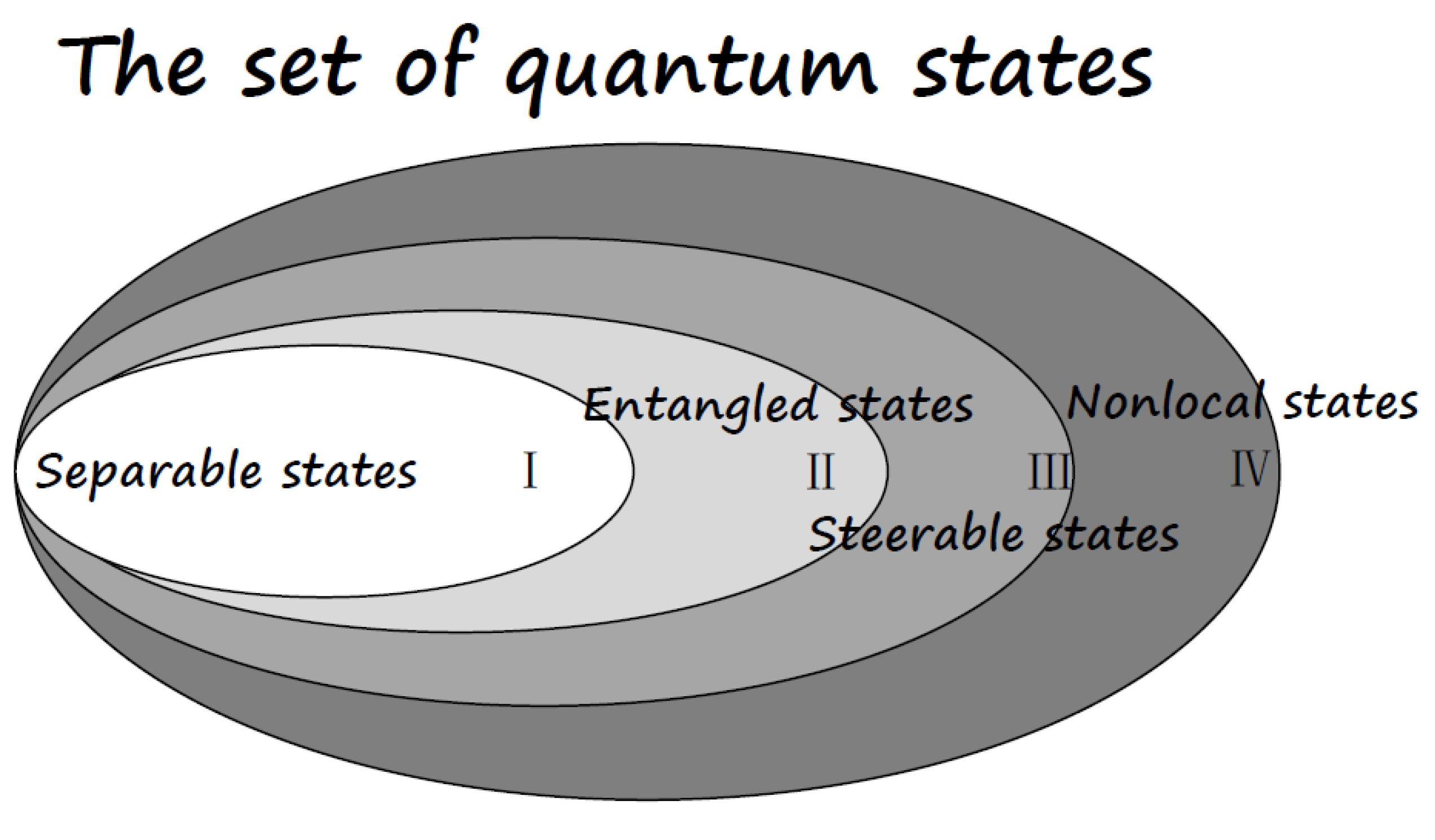
3]. This feature challenges one’s intuition in a way that the set of prepared states in the EPR steering fashion cannot be produced by any local operations. Therefore, a genuine nonlocal phenomenon happens in this procedure. Whilst EPR steering requires entanglement as the basic resource to complete the remote state preparation task, the correlation implied by EPR steering is not always enough to violate any Bell inequality. In this sense, EPR steering can be seen as a subtle quantum correlation or quantum resource in between entanglement and nonlocality.
The discussion of EPR steering dated back to the emergence of quantum theory, when Einstein, Podolsky, and Rosen questioned the completeness of quantum theory in their famous 1935’s paper [
4]. According to their argument on local realism, quantum theory allows a curious phenomenon: the so-called “spooky action at a distance”. In the next year 1936, Schrödinger firstly introduced the terminology “entanglement” and “steering” to describe such quantum “spooky action”. Debates on whether quantum theory is complete and how to understand quantum entanglement lasted for the following 20 years and were finally concluded by Bohm [
5] and Bell [
6,
7]. The celebrated Bell inequality [
8] was provided in 1955 as a practical verification of such “spooky action” or equivalent “non-locality”. Noteworthily, the experimental tests of nonlocality without loopholes due to the real devices have been only carried out in recent years [
9,
10,
11,
12].
Strictly speaking, Bell inequalities test nonlocal correlations of general physical theories, not necessarily the quantum theory [
8]. This can be understood by that Bell inequalities are functions of general probabilities and are independent of how to realize such probabilities. Thus, it is still a question on how quantum theory realizes such “spooky action” in its own context. As proved by Werner in 1989, entanglement is a necessary resource to exhibit nonlocality but not a sufficient one [
13]. Note that, in some physics research fields, e.g., condensed matters, “entanglement” is equivalently used as “nonlocality” to discuss the genuine quantum phenomenon. In Werner’s paper [
13], the disentangled state is termed as the “classical correlated state”, when the terminology “separable state” was not often used at that time. It, thus, drives physicists to consider under what conditions can entanglement show nonlocal effects in the quantum context.
This problem was further addressed by Wiseman, Jones, and Doherty [
1,
14] in 2007. They showed that there exists a set of bipartite entangled states, which can exhibit EPR steering properties but are not sufficient to violate Bell inequalities. For such states, termed as “EPR steerable states”, one party can remotely prepare certain quantum states on the other party, and such preparations can not be replaced by any classical or quantum local operations. It, thus, represents another form of “spooky action at a distance”. This “action” is in the quantum context in the sense that the description on the other party is always quantum. Then, EPR steering stands as an intermediate between entanglement and nonlocality, and they together form a relatively complete picture. On the one hand, EPR steering can be seen as a certification of entanglement. On the other hand, EPR steering exhibits a weaker form of nonlocality in specific scenarios.
The significance of studying EPR steering follows from important applications of entanglement and nonlocality. The entanglement and nonlocality have been proved to be important resources for many quantum information tasks, from quantum communications to quantum computation. As an intermediate but subtle resource, EPR steering may help to reduce the difficulty of such tasks and helps to inspire new protocols. For instance, nonlocality offers the strongest security in quantum cryptography. Nevertheless, the realization of nonlocality is based on violating Bell inequality, which is experimentally difficult. Simultaneously, violating EPR steering inequality is relatively applicable [
15,
16,
17], and the realization of EPR steering also provides a different communication security for specific tasks [
18].
Numerous results have been concluded in recent years. To certify EPR steering, there have been many approaches to witness EPR steerable correlations. Besides the basic linear inequality [
19,
20], local uncertainty relations [
21,
22,
23], entropic uncertainty relations [
24], fine-grained uncertainty relations [
25], the CHSH-type inequality [
26], covariance matrices [
27], the semidefinite programming method [
28], the all-versus-nothing fashion [
29,
30], and other methods, have been adopted in formulating inequalities and equations to verify EPR steering. As for understanding EPR steering, the asymmetric property [
31,
32], the super-activation of EPR steering correlation [
33,
34], the quantization of EPR steering [
34,
35,
36,
37], the negativity of steerable states [
38], steering in the presence of positive operator valued measure (POVMs) [
39], the resource theory description [
40], the multipartite case [
41,
42], etc. are deeply investigated. In addition, relations between EPR steering and the uncertainty principle [
23,
24,
43,
44], joint measurability [
45,
46], sub-channel discrimination [
47], etc. have also been discussed in the literature. Experimentally, EPR steering has been tested on various physical systems and platforms [
16,
19,
48,
49,
50,
51,
52,
53].
Noteworthily, comprehensive reviews [
21,
22,
28] have given a complete picture of EPR steering. In Reference [
21], the EPR steering is introduced based on the EPR
Gedankenexperiment [
4], while proposals to realize EPR steering test are reviewed from both the theoretical and experimental perspectives. The experimental friendly criteria for certifying EPR steering is thoroughly investigated in Reference [
22]. In particular, the characterization of EPR steering is reviewed through the semidefinite programming method [
28], which can be explicitly used to tackle the complicated numerical problems in detecting EPR steering. Recently, the EPR steering test is further generalized to a unified framework where classical, quantum, and post-quantum steering can be investigated [
54]. The black box framework in that paper is the same with the framework adopted here.
In this paper, we will mainly focus on the basic techniques to certify the bipartite EPR steering and related quantum correlations, and show how to certify EPR steerable correlation in different fashions. This survey is organized as follows. In
Section 2, the basic notations and the box framework combined with trust/untrust scenarios will be introduced. After a brief discussion of entanglement and nonlocality in such a framework, EPR steering as well as other equivalent descriptions will be introduced in
Section 3. In
Section 4, the systematic method to formulate the criteria for certifying EPR steering will be discussed. Two types of criteria, (a) linear EPR steering inequality and (b) criterion based on uncertainty relations, will be studied in detail. Their performances on some typical states will also be given. Finally, a summary will be given in
Section 5.
2. Preliminaries and Notations
In this paper, we will focus on the bipartite correlation with input parameters and output parameters and discuss, under certain assumptions, whether the correlation can be certified as EPR steerable. Before the discussion, we firstly introduce the basic terminology and the notations that will be used throughout the paper.
2.1. The Box Framework
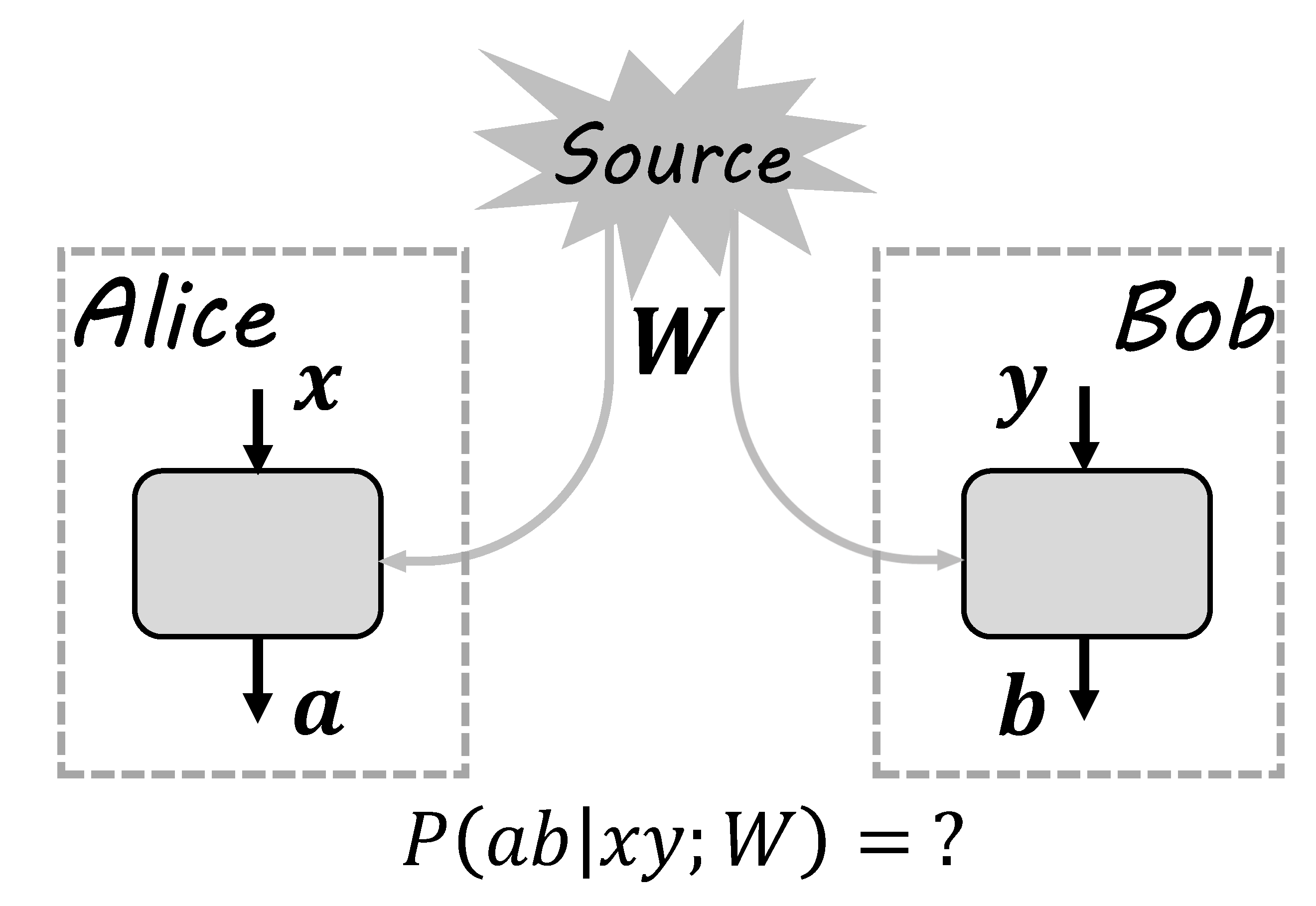
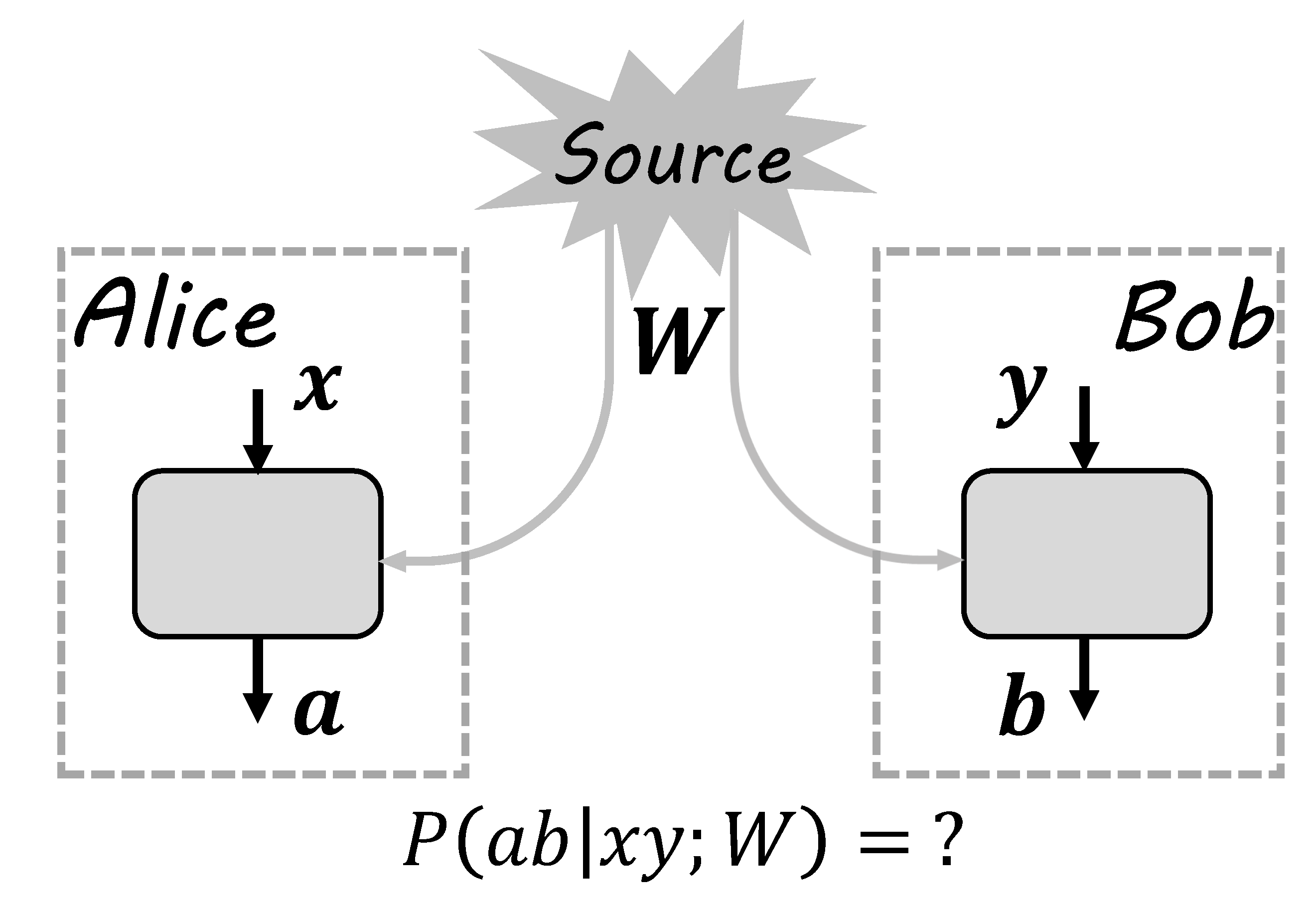
A typical experiment of testing a bipartite correlation can be described by the box framework, as shown in
Figure 1. Suppose two parties, Alice and Bob, are in their closed labs to do the experiment. The lab is sketched as the doted rectangle, inside which there is an experimental device sketched as the solid rectangle. In each run of the experiment, Alice and Bob are distributed with a bipartite state
W from a source, which may be unknown. In their own labs, combined with the subsystem they received, Alice and Bob can input
x and
y to the device and obtain outputs
a and
b, respectively. Such a run is repeated enough times so that, after the experiment, Alice and Bob can obtain the correlation
by announcing their input and output results. Depending on different descriptions and mechanics of the source and device, the correlation may have different structures and properties. The aim of the box framework is then to characterize the dependence of the correlation on descriptions of sources and devices.
In general, there is no restrictions on the source, inputs, and outputs. For instance, the source W; inputs ; and outputs can all be quantum states, with the devices being quantum instruments. In this case, the box framework characterizes general local quantum operations on bipartite quantum states. In this paper, we will restrict the device to be the typical measurement device in labs. That is, the inputs represent different measurement settings on the received subsystem and the outputs represent different outcomes. Physically, can be described by natural numbers and corresponding sets are denoted as , respectively. In the scenario of steering and nonlocality, there are some common assumptions.
2.1.1. The No-Signaling Principle
Roughly speaking, the no-signaling principle describes that Alice and Bob cannot communicate with each other during the test [
55,
56]. In the above box framework, this principle guarantees the independence between Alice and Bob such that the correlation
is faithfully generated by the state
W and measurements but not any other statistics shared before or during the test. Mathematically, the no-signaling principle has the following form,
Therefore, the no-signaling principle denies the possibility that Alice and Bob can guess each other’s measurement setting y or x based on their local statistics or , respectively.
Experimentally, this principle is guaranteed by Alice and Bob being separated far away (space-like separation) and by both of them choosing measurement settings independently and randomly. The no-signaling principle is then guaranteed by two hypotheses. Firstly, two parties in the space-like separation cannot communicate with each other. Secondly, the random number generators [
57] in Alice’s and Bob’s labs should be truly independent and random.
In the test of nonlocality and EPR steering, we suppose that the no-signaling principle has been guaranteed.
2.1.2. Trust and Untrust
If the description of boxes is restricted as quantum or classical, we can further define if a device is trusted or not for the sake of practice. A device is said to be trusted if it is believed that the function of the device is exactly what we expect. This definition comes from the sense that, without the assistance of other resources, it is, in principle, impossible to verify how an unknown device really functions based solely on statistics of measurement results. Particularly, in the rest of the paper, the device is trusted if it is a quantum device and the accurate quantum mechanical description is known.
Therefore, if we say some devices are trusted, we actually make additional assumptions. For instance, we say a measurement device is trusted if its measurement can be exactly described by a known set of POVMs , where y is the measurement settings and b is the measurement outcome. On the contrary, we say a measurement device is untrusted if we can, at most, describe the measurement results by a probability distribution .
The scenario is device-independent if all devices and the source are untrusted. Particularly, the scenario is measurement-device-independent if all measurement devices are untrusted. If some but not all measurement devices are untrusted, we say the corresponding scenario as semi-measurement-device-independent.
2.2. Entanglement and Nonlocality
In the box framework, we can discuss entanglement and nonlocality in an operational manner. Let
label different hidden states in
W and
be its probability such that
. The correlation can be written as
The local realism argues that, for any hidden variable
,
can be localized such that
. We say the correlation
is a local correlation if all hidden states in Equation (
3) can be localized.
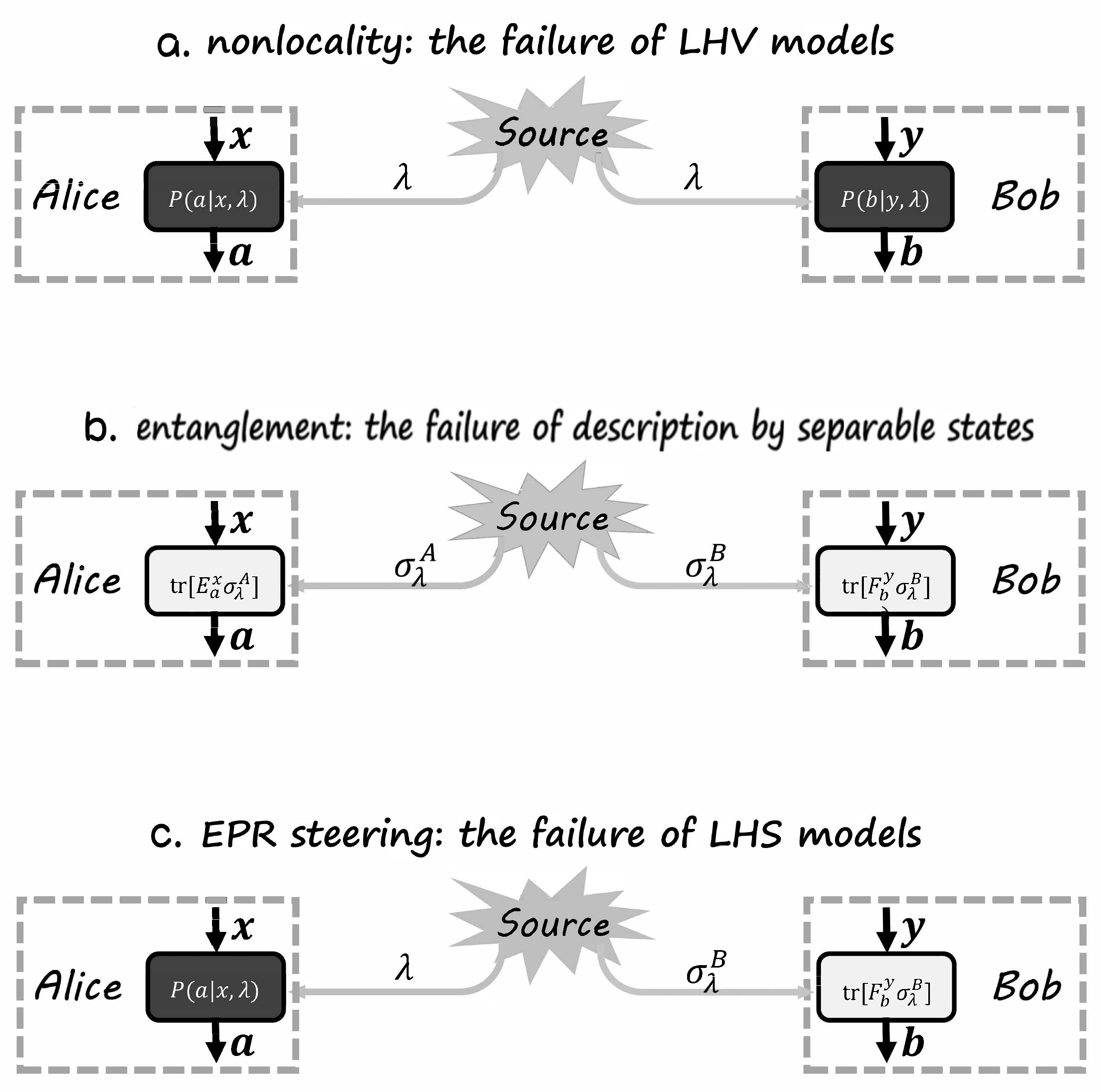
The nonlocality is defined as the failure of local realism, usually modeled by local hidden variable (LHV) models. The main property of LHV models is that, if two parties are no longer interacting (guaranteed by space-like separation), their measurements should be local, i.e.,
a should be independent on
y and
b (similarly for
b). Thus, for each hidden variable
, the LHV models produce a localized correlation
. The nonlocal correlation is defined as correlations that cannot explained by the local correlation
where
and
are arbitrary probabilities. If the statistic of the experimental results cannot be explained by Equation (
4), then the correlation is nonlocal and we say the source
W is nonlocal.
The Bell inequality is indeed a linear constraint on all local correlations. This is based on the fact that all local correlations from Equation (
4) form a convex subset. There are some correlations produced by quantum mechanics outside this subset. Precisely, in the probability space, points of local correlations form a polytope, while all probabilities produced by quantum mechanics form a superset of the polytope [
8]. Thus, one can distinguish a specific nonlocal correlation from all local correlations by a linear equation. Additionally, since Alice’s and Bob’s measurement results are described by general probabilities, the problem of nonlocality corresponds to the device-independent scenario.
The entanglement is defined as the failure of description in the form of separable states. The separable states have a clear definition that
is separable if
with
and
being some local quantum states and
. Usually, the decomposition of a separable state is not unified and the verification of a separable is not a easy task. However, if the source
W distributes separable states in the box framework, then the correlation is in the form of
where
and
are probabilities yielded by quantum measurements. Here
and
are local hidden quantum states which may be unknown to Alice and Bob, while
and
are POVMs that Alice and Bob know well. If the statistic of experimental results cannot be explained by Equation (
5), then the correlation is non-separable, i.e., entangled, and we say the source
W is entangled.
Like the Bell inequality, one can use a linear constraint, the so-called entanglement witness, to bound all separable correlations to certify an entangled correlation. Similar to the case of local correlations, correlations produced by all separable states also form a convex set. Since all devices are assumed to be quantum, here, the entanglement corresponds to the scenario where all measurement devices are trusted.
4. Criteria of EPR Steering
A natural question arises on how to certify the EPR steering correlation. It can be shown that unsteerable correlations, i.e., correlations produced by LHS models, form a convex subset. According to the hyperplane separate theorem, there always exists a linear constraint of all unsteerable correlations, such that steerable ones can be witnessed [
22].
Suppose that the box framework is fixed, i.e.,
,
,
, and
are all fixed. Then, the set of probability distributions
can be seen as a point in the probability space. All correlations yielded by LHS models in Equation (
6)
form a subset
. This subset of usteerable correlations is convex.
Lemma 1. The unsteerable correlations form a convex subset.
Proof. For any two LHS models
and
, the correlation yielded by them are
respectively. Then, any linear combination of these two, i.e.,
with
, can always be written as the correlation yielded by another LHS model
, where
It is easy to verify that
Therefore, the subset of all unsteerable correlation is convex. □
Any convex subset can be bounded by a linear equation, which is guaranteed by the hyperplane separation theorem [
61].
Lemma 2. (Hyperplane separation theorem) Let A and B be two disjoint nonempty convex subsets of . Then, there exists a nonzero vector v and a real number c such thatfor all x in A and y in B, i.e., the hyperplane and v the normal vector, separates A and B. The proof can be found in many Linear Algebra textbooks (like Reference [
61]) and is skipped here. Based on these two lemmas, one can certify EPR correlations by linear inequalities [
22].
Theorem 2. Any EPR steerable correlation can be verified by an inequality.
Proof. According to Lemma 2, let the set A be the set of all unsteerable correlations, which is proved by Lemma 1. For any EPR steerable correlation , let B be a sufficient open ball containing , such that the open ball is disjoint with the subset A. Then, there always exists a hyperplane , such that holds for all unsteerable correlations while holds for the certain EPR steerable correlation . □
4.1. Linear EPR Steering Inequality
Perhaps the most straightforward criteria to verify EPR steering is the linear steering inequality. The linear steering inequality to certify EPR steering is like the Bell inequality to nonlocality and the entanglement witness to entanglement. From the Proof of Theorem 2, the linear steering inequality has a general from, i.e., for all unsteerable correlations, the following inequality holds:
where
denotes the correlation
,
are some coefficients, and
is the bound of all unsteerable correlations.
Then, if for a certain correlation
satisfies
, i.e., the linear steering inequality in Equation (
15) is violated, then it can be conclude that
cannot be explained by any LHS correlations, i.e.,
is EPR steerable.
In practice, the expectation value of the measurement results is usually considered for convenience and clarity. Combined with the scenario of EPR steering where Alice’s and Bob’s measurement devices are untrusted and trusted, respectively, denote as the random variable corresponding to Alice’s measurements and as the general quantum measurement for Bob’s measurements, with being the POVM corresponding to the result .
Suppose that, in an EPR steering test experiment, Alice and Bob randomly and independently choose
n pairs of measurements
and
, respectively, labeled by
. After the experiment, the value of each pair of measurements is
Then, the following linear steering inequality holds for all unsteerable correlations [
19,
20].
Theorem 3 (The linear EPR steering inequality).
If the result of an EPR steering test violates the following inequalitywhere are real numbers and satisfieswith the maximal eigenvalue of the matrix, then the correlation of the test shows EPR steering. The corresponding quantum state is EPR steerable, and more precisely, Alice can steer Bob. Proof. By definition,
is an EPR steering inequality when it holds for all unsteerable correlation
.
has a general form as defined by Equation (
6), i.e.,
It is straightforward to verify that
Here, the second line comes from
, and the third line comes from
□
Here, are flexible coefficients to help to form efficient inequalities.
Example 1. The 2-qubit Werner state [13]. As a simple example, one can consider the 2-qubit Werner state, which is an often-used bipartite quantum states in quantum information processes. It can be constructed as the mixture of the maximally entangled state and the white noise , i.e.,where . It can be theoretically proved that is entangled when and is separable when [13]. When , there exists certain observables such that the CHSH inequality is violated [62], i.e., is nonlocal when . When , any measurement results of can be explained by some LHV models, i.e., never exhibits a nonlocality when [63]. It is an open question of whether is nonlocal when . It has been proved that is the critical bound for the EPR steerability of [1], i.e., any measurement results of can be explained by LHS models when . It is easy to see that the performance of linear EPR steering inequality (Theorem 3) depends on the number of Alice and Bob’s measurement pairs and Bob’s observables. Furthermore, from the symmetric property of the 2-qubit Werner state, when Bob’s k’th observable is , where is a unit vector and is the set of Pauli matrices, i.e., Alice can always choose her observable as , such that the expectation value of the measurement pair . If we further let , always holds independent of the number of measurements.
The bound , however, depends on n and the form of . More precisely, when , let and . The corresponding and, thus, is steerable when . When , let , , and . The corresponding and, thus, is steerable when . It can be proved that, for , the above Bob’s observables are optimal [15,19]. When , it is a little complicated, but one can let , , , and . The corresponding and is steerable when . In this case, the observables may not be optimal. It can be concluded that the larger the number of measurement pairs, the lower bound of μ can be detected by the linear inequality. In principle, when , which can be understood as the state tomography, one can image that the critical bound for the EPR steerability can be finally found, i.e., [15,19]. This example shows the application of the linear EPR steering inequality, as well as its limitations. Firstly, the linear inequality (Equation (
18)) may not give the critical bound of the EPR steerability when testing some kinds of quantum states. This makes sense as the linear inequality represents only one hyperplane in the probability space, while the sufficient and necessary condition for the EPR steerability usually requires numerous such hyperplanes. Secondly, the linear inequality (Equation (
18)) closely relies on observables that would be chosen. Thus, in practice, a natural question is how to choose Alice’s and Bob’s observables such that the detection of EPR steering is efficient. Thirdly, as seen from the example, the more measurements, the better the performance of the linear inequality. However, the complexity to compute
is also increasing when
n becomes large. In fact, the method in Equation (
19) to calculate
needs to maximize all
for all
k, which leads the complexity of
exponentially increasing with
n. Therefore, it is motivated to specify systematic techniques of choosing proper observables and obtaining
more efficiently.
4.1.1. Optimal Observables for Alice
Usually, Bob’s observables
are fixed due to the measurement devices are trusted in his lab. Here, the problem of how Alice chooses proper measurement settings according to Bob’s observables is discussed. The main idea is that, to violate the linear inequality (Equation (
18)) more obviously, Alice should choose observables such that
is larger when
and
is smaller when
. In this sense, the value of
can be made as large as possible so as to violate the unsteerable bound. This technique can be formulated based on the following lemma [
64].
Lemma 3. For any two -dimensional Hermite matrices A and B, the following equation holds,where U is an arbitrary unitary matrix and and are the eigenvalues of A and B, respectively. Proof. Write
and
in the diagonal form, where
and
are specific bases of the operator space, respectively satisfying
and
. Then,
Here,
is another bases of the operator space, and it is straightforward to verify that the transition matrix
is a doubly stochastic matrix, i.e.,
and
. As the doubly stochastic matrix can always been written as the convex combination of permutation matrices [
61], the following equation holds:
where
is a certain permutation. □
Then, the following technique to choose Alice’s observables
can be specified [
20].
Theorem 4. When the quantum state is to be tested and Bob’s observables are fixed as , is maximal if Alice’s observables satisfy the following conditions.
- 1.
and are diagonalized in the same bases .
- 2.
Eigenvalues of and eigenvalues of have the same order.
Then,where and are eigenvalues of and , respectively. Proof. For any observables
and
on a quantum state
, the expectation value of
is
where
is a unitary matrix,
is a diagonal matrix, and
holds. From Lemma 3,
is maximized when
can diagonalize
simultaneously, i.e.,
is a diagonal matrix, and
has the same order of diagonal values with
. In this case,
is the maximal over all Alice’s observables, where
and
are eigenvalues of
and
respectively. □
Note that, when
contains degenerate eigenvalues, the optimal
by this method are not unique. As an example, we consider the
-dimensional isotropic state [
23].
Example 2. The -dimensional isotropic state.
The -dimensional isotropic state has the following formwhere . From the partial transpose criterion [65], can be certified entangled if . To detect its steerability, let Bob’s observables be the Gell–Mann matrices: Then, from Theorem 4, Alice’s observables can be chosen as , such that obtains its maximal value and .
For the LHS bound we have the following results. When and Bob chooses , , and , the state is steerable if . When and Bob chooses , , , and , the state is steerable if . When and Bob chooses , , , , and , the state is steerable if . When and Bob chooses , , , , , and , the state is steerable if . When and Bob chooses observables from to , the state is steerable if . Finally, when and Bob chooses all Gell–Mann matrices, the state is steerable if . Note that, in this case, when Bob chooses only two observables from Gell–Mann matrices, the corresponding linear inequality will not detect any steerability of the state.
4.1.2. A Flexible Bound on Unsteerable Correlations
As discussed above, the unsteerable bound
in the linear inequality from Equation (
19) contains a maximization over all Alice’s measurement results. The complexity to compute
is exponentially increasing with the number of
n. This property can also be concluded from the above two examples. Therefore, when the number of measurements are large, a simpler bound is needed [
66].
Theorem 5. If the result of an EPR steering test violates the following inequalitywhere are some real numbers and satisfieswith , then the correlation of the test is EPR steering. The corresponding quantum state is EPR steerable, and more precisely, Alice can steer Bob. Proof. Take in the definition of unsteerable correlation (Equation (
6)),
Here, is the expectation value of under the probability distribution and is the expectation value of under the probability distribution . The third line is based on the Cauchy–Schwarz inequality , where we let and = . The fourth line comes from and . The fifth line is due to the concavity of the function . □
Compared with the bound (Equation (
19)) in the linear EPR steering inequality (Equation (
18)), here, the unsteerable bound
is simpler to compute and the complexity to obtain
and
increases linearly with
n. However,
may not as tight as
, i.e., some steerable states may be detectable by bound
but not with bound
.
4.2. EPR Steering Inequality Based on Local Uncertainty Relations
For a random variable
, the variance is defined as
, where
is the mean of the square of
X and
is the square of the mean of
X. For any random variable
X,
always holds. In quantum mechanics, the variance describes the uncertainty of measurement results. For instance, consider the projective measurement
, where
are projectors and
are the corresponding outcome. The variance of measurement results
on a quantum state
is in the form of
, where
is the expectation value of measurement
M on
and
is the expectation value of the square of measurement
M on
. In the following, the subscript
is omitted for simplicity. The uncertainty relation can be described as, for a set of measurements
, the sum of variances is larger than a certain value, i.e.,
with
. In a nontrivial case, where
has no common eigenvectors,
is positive, i.e.,
[
67,
68,
69].
In the EPR steering test, only Bob’s measurements are assumed to be quantum. Then, the local uncertainty relations (LUR) on Bob’s side can help to certify EPR steering correlation [
23].
Theorem 6 (Steering inequality based on LUR).
If the result of an EPR steering test violates the following inequalitywhere are some real numbers and , then the correlation of the test is EPR steering. The corresponding quantum state is EPR steerable, and more precisely, Alice can steer Bob. Proof. Generally, for any two random variables
X and
Y, let
be the joint probability distribution and
be the conditioned probability distribution. Then, the variance of
Y satisfies
where the third line comes from the concavity of function
and
is the variance of
Y under the distribution
. Now, consider the definition of unsteerable correlation
One has
where trivial results
is used. □
Here,
are some flexible real variables. For a certain probability distribution
generated from an EPR steering test, the optimal
can be calculated such that the inequality from Equation (
42) is maximally violated. For each term in Equation (
42),
holds where
is the covariance. Therefore,
can be seen as a quadratic polynomial of
, from which the optimal
can be obtained, i.e.,
It is noteworthy that, here, like the case in the linear inequality of Equation (
34), the complexity to compute unsteerable bound
also increases linearly with the number of measurements
n, better than the case in inequality (Equation (
18)), where the complexity increases exponentially with
n.
Remark 2. The use of LUR in quantum correlations.
In the case of EPR steering, the inequality from Equation (42) shows that, for unsteerable correlations, the uncertainty of the total system is always larger than that of one subsystem B. This conclusion is consistent with the definition of LHS models, where only Bob has the quantum description. One property of EPR steering is, thus, that the uncertainty of the correlated measurement results can be less than the uncertainty of one subsystem. In this sense, the violation of LUR indicates the amount of quantum correlations. Furthermore, if quantum entanglement is considered in this fashion, for any separable states , it has been proved thatwhere [70]. That is, in the case of quantum separable states, where both Alice and Bob can be described as quantum but classically correlated, the uncertainty of the total system is always larger than the sum of the local uncertainty relations of all subsystems. However, for the nonlocality, the probability distribution of LHV models always satisfieswhich is a trivial result, and no violation can be detected. In fact, formulating a nonlinear form of Bell inequalities is a difficult problem. It is noteworthy that in Reference [43], the violation of the CHSH inequality [62] can be restricted by the so-called fine-grained uncertainty relations combined by a properly-defined steerability. Such a restriction holds only when a specific form of the Bell inequalities are selected [44]. Different from the variance-based uncertainties discussed here or entropies [24], the fine-grained uncertainty relation are described in a linear form of the set of measurement observables, which can also be used as the certification of EPR steering [25]. Example 3. Bell diagonal states
Bell diagonal states has the following simple form,where is the set of Pauli matrices. In another form, can be written in the diagonal formwhere and are four Bell states and . If three Pauli matrices are selected as the observables, the linear EPR steering inequality (18) can be simplified as with . Here, the absolute value and binary suggest that there are a set of linear inequalities. The violation implies that is steerable if . Nevertheless, the EPR steering inequalities (42) based on LUR can be optimized as , the violation of which implies . As a comparison, it can be verified that, in this example, the inequality based on LUR certifies a larger steerable region of Bell diagonal states than the linear inequality [23]. 4.3. Realignment Method
From the EPR steering inequality based on LUR, the realignment method for certifying entanglement also works for the EPR steering case. Generally, the realignment criterion [
71] or the computable cross-norm criterion [
72] are important techniques to certify bound quantum entanglement, i.e., entangled states with a positive partial transpose. Mathematically, the realignment is a map on a quantum state
such that
. If
is separable, then the trace norm of the matrix
is not larger than 1.
To obtain the norm of , one can seek for the complete set of local orthogonal observables (LOOs). A complete set of LOOs is a collection of observables satisfying , , and . Indeed, forms a complete set of orthonormal bases for the corresponding operator space. Then, a state can be written as , where . For example, in the case of qubits, the identity matrix and three Pauli matrices form a complete set of LOOs, and in the case of qutrits, the identity matrix and eight Gell-Mann matrices form a complete set of LOOs.
For any bipartite quantum state
, suppose that the maximal dimension of Alice’s Hilbert space and Bob’s Hilbert space is
d. Let the complete sets of LOOs for Alice’s operator space and Bob’s operator space be
and
, respectively. Then,
can always be written as
, where
. The singular value decomposition on the matrix
yields
, where
is the diagonal matrix with
,
and
are two orthogonal matrices, i.e.,
. Take
into the expression of
, and finally, the Hilbert–Schmidt decomposition of
can be obtained:
where
and
. It can be verified that
and
are another two complete sets of LOOs, and
.
In a certifying entanglement, if
is separable, then the realignment [
71,
72] method guarantees that
In certifying EPR steering, a similar result can be concluded [
23].
Theorem 7 (Realignment for EPR steering).
If satisfiesthen is EPR steerable. In this case, Alice can steer Bob and Bob can also steer Alice. Proof. From the EPR steering inequality based on LUR, for a bipartite quantum state
, let Alice’s and Bob’s observables be
and
and
. The violation of Equation (
42) implies
. A sufficient condition of this inequality is omitting the quadratic term, i.e.,
. Finally, let
, and the inequality (
58) is concluded. □
Different from the linear inequality and the inequality based on LUR, the realignment method does not require an EPR steering test. For any quantum state , there is a possibility that one can know whether this state is EPR steerable or not, regardless of how to certify it in the test. A limitation is that, as a corollary of the inequality, the realignment method will not perform better than the inequality.
In the entanglement case, where the state is entangled if the value
is larger than 1. Here, this quantity should be larger than
to certify the EPR steerability. Although the realignment method can certify positive partial transpose (PPT) entanglement, it remains an open question if it can certify PPT EPR steering, i.e., EPR steerable states with PPT. Note that there have been numerical results proving the existence of such states [
73,
74].

{kind=link}
{kind=link}
{kind=link}