Optimization of Condition Monitoring Decision Making by the Criterion of Minimum Entropy



Abstract
1. Introduction
2. Literature Review
3. Quantification of Condition Monitoring Uncertainty at Successive Times
4. The Shannon Entropy of Imperfect Condition Monitoring
5. Optimal Preventive Maintenance Thresholds
6. Degradation Process Model
7. Results and Discussion
- For moments of condition monitoring and , Shannon entropy decreases with an increase in the preventive threshold and then remains constant up to the failure threshold FT. Therefore, as follows from Figure 1a,b, for the moment the value of the preventive threshold can be any in the interval (21.9, 25) kV and for the moment in the interval (23.3, 25) kV;
- Shannon entropy is a strictly convex function of the preventive maintenance threshold, starting at time and subsequent moments of condition monitoring;
- The optimal preventive maintenance threshold increases with the time of inspection for , which may be explained by an increase in the mathematical expectation of the stochastic degradation process (32) with time;
- Starting from time , Shannon’s minimum entropy increases with increasing inspection time, reaching a maximum at , and then decreases almost to zero at .
- All probabilities depend on the time of condition monitoring t;
- The probability of true-positive is almost constant from 0 to 250 h and starts to decrease rapidly in the interval 300 to 500 h reaching 30% at , and then begins to decrease slowly reaching 2.3% at ;
- The probability of false-positive begins to go up remarkably at and get to 5.5% at , and then slowly decreases to 1.1% at ;
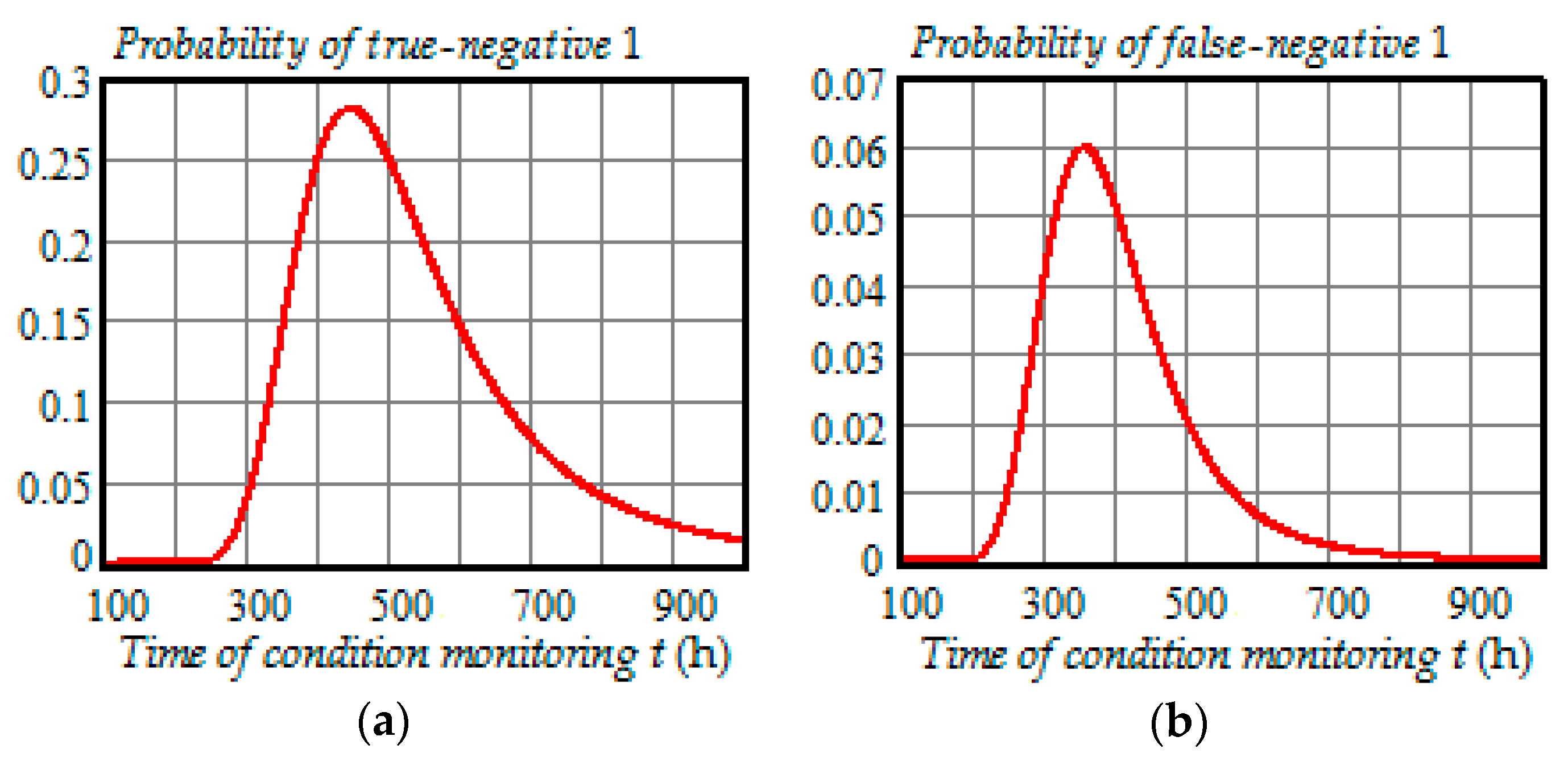
- The probability of true-negative 1 begins to increase significantly at and get to 28% at , and then gradually decreases to 1.4% at ;
- The probability of false-negative 1 begins to go up strongly at and get to 6% at , and then decreases to 0.016% at ;
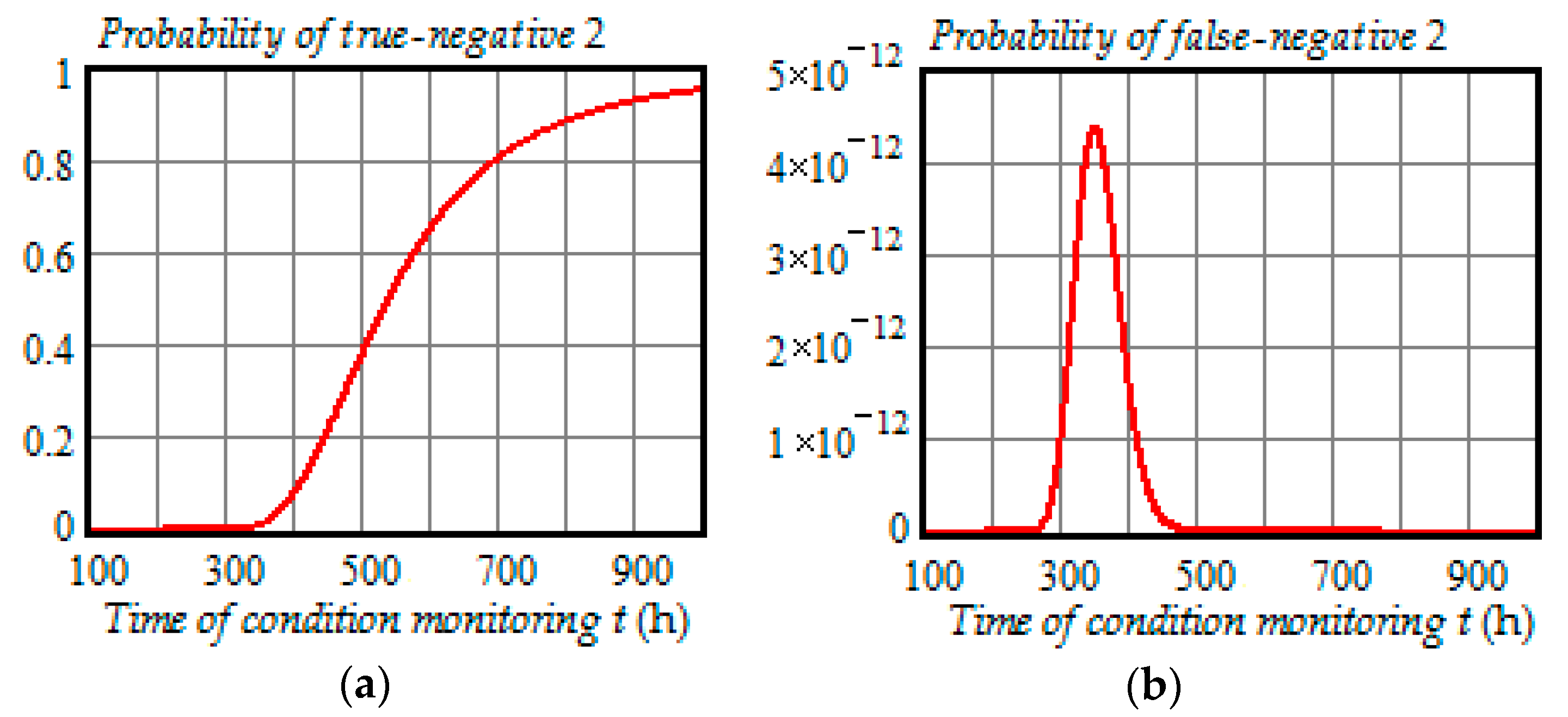
- The probability of true-negative 2 is almost zero from 0 to 350 h and starts to increase rapidly in the interval 400 to 600 h reaching 65% at , and then increases slower reaching 95.1% at ;
- With the chosen preventive maintenance threshold, the probability of false-negative 2 is almost zero over the interval (0, 1000 h).
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| CBM | Condition-based maintenance |
| Probability density function | |
| RUL | Remaining useful life |
Nomenclature
| Time of conducting condition monitoring | |
| Random value of the system state parameter at time | |
| Random measurement result of the system state parameter at time | |
| Random noise or measurement error at time | |
| Realization of at time | |
| FT | Functional failure threshold |
| Preventive maintenance threshold at time | |
| Optimal preventive maintenance threshold at time | |
| True-positive event at inspection time | |
| False-positive event at inspection time | |
| False-negative 1 event at inspection time | |
| True-negative 1 event at inspection time | |
| False-negative 2 event at inspection time | |
| True-negative 2 event at inspection time | |
| Probability of true-positive event at inspection time | |
| Probability of false-positive event at inspection time | |
| Probability of false-negative 1 event at inspection time | |
| Probability of true-negative 1 event at inspection time | |
| Probability of false-negative 2 event at inspection time | |
| Probability of true-negative 2 event at inspection time | |
| Probability density function of the system state parameter at time | |
| Total error-free probability | |
| Total error probability | |
| H() | Shannon entropy when monitoring the system condition at the time |
| Initial value of the system state parameter | |
| Random degradation rate of the system state parameter | |
| β | Exponent of time |
| Φ() | Probability density function of random degradation rate |
| δ(x) | Delta function |
| Mathematical expectation of the random degradation rate | |
| Standard deviation of the random degradation rate | |
| Standard deviation of measurement error |
References
- Shannon, C. A mathematical theory of communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef]
- Lee, K.; Lee, S.-Y.; Kangbin, Y. Machine learning based file entropy analysis for ransomware detection in backup systems. IEEE Access 2019, 7, 110205–110215. [Google Scholar] [CrossRef]
- Einicke, G.; Sabti, H.; Thiel, D.; Fernandez, M. Maximum-entropy-rate selection of features for classifying changes in knee and ankle dynamics during running. IEEE J. Biomed. Health Inform. 2018, 22, 1097–1103. [Google Scholar] [CrossRef] [PubMed]
- Zu, T.; Kang, R.; Wen, M.; Zhang, Q. Belief reliability distribution based on maximum entropy principle. IEEE Access 2017, 6, 1577–1582. [Google Scholar] [CrossRef]
- Li, H.; Pan, D.; Philip Chen, C. Intelligent prognostics for battery health monitoring using the mean entropy and relevance vector machine. IEEE Trans. Syst. Man Cybern. Syst. 2014, 44, 851–862. [Google Scholar] [CrossRef]
- McDonald, G.; Zhao, Q. Multipoint optimal minimum entropy deconvolution and convolution fix: Application to vibration fault detection. Mech. Syst. Signal Process. 2017, 82, 461–477. [Google Scholar] [CrossRef]
- Liu, J.; Hu, Y.; Wu, B.; Jin, C. A hybrid health condition monitoring method in milling operations. Int. J. Adv. Manuf. Technol. 2017, 92, 2069–2080. [Google Scholar] [CrossRef]
- Robles, B.; Avila, M.; Duculty, F.; Vrignat, P.; Begot, S.; Kratz, F. Evaluation of minimal data size by using entropy, in a HMM maintenance manufacturing use. IFAC Proc. Vol. 2013, 46, 1536–1541. [Google Scholar] [CrossRef]
- Yankov, M.; Olsen, M.; Stegmann, M.; Christensen, S.; Forchhammer, S. Fingerprint entropy and identification capacity estimation based on pixel-level generative modelling. IEEE Trans. Inf. Forensics Secur. 2019, 15, 56–65. [Google Scholar] [CrossRef]
- Nowak, W.; Guthke, A. Entropy-based experimental design for optimal model discrimination in the geosciences. Entropy 2016, 18, 409. [Google Scholar] [CrossRef]
- Young, C.; Subbarayan, G. Maximum entropy models for fatigue damage in metals with application to low-cycle fatigue of Aluminum 2024-T351. Entropy 2019, 21, 967. [Google Scholar] [CrossRef]
- Liu, L.; Wang, S.; Liu, D.; Zhang, Y.; Peng, Y. Entropy-based sensor selection for condition monitoring and prognostics of aircraft engine. Microelectron. Reliab. 2015, 55, 2092–2096. [Google Scholar] [CrossRef]
- Liu, L.; Wang, S.; Liu, D.; Peng, Y. Quantitative description of sensor data monotonic trend for system degradation condition monitoring. In Proceedings of the Prognostics and System Health Management Conference (PHM-Chengdu), Chengdu, China, 19–21 October 2016. [Google Scholar]
- Liu, G.; Zhao, J.; Li, H.; Zhang, X. Bearing degradation assessment based on entropy with time parameter and fuzzy c-means clustering. J. Vibroengineering 2019, 21, 1322–1329. [Google Scholar] [CrossRef]
- Wang, H.; Liu, Z.; Nunez, A.; Dollevoet, R. Entropy-based local irregularity detection for high-speed railway catenaries with frequent inspections. IEEE Trans. Instrum. Meas. 2019, 68, 3536–3547. [Google Scholar] [CrossRef]
- Aeronautical Design Standard Handbook. Condition-Based Maintenance System for US Army Aircraft: ADS-79D-HDBK. Available online: http://everyspec.com/ARMY/ADS-Aero-Design-Std/ADS-79-HDBK_2013_49364/ (accessed on 7 March 2013).
- Chen, N.; Ye, Z.S.; Xiang, Y.; Zhang, L. Condition-based maintenance using the inverse Gaussian degradation model. Eur. J. Oper. Res. 2015, 243, 190–199. [Google Scholar] [CrossRef]
- Abdel-Hameed, M. Inspection and maintenance policies of devices subject to deterioration. Adv. Appl. Probab. 1987, 19, 917–931. [Google Scholar] [CrossRef]
- Abdel-Hameed, M. Correction to: “Inspection and maintenance policies of devices subject to deterioration”. Adv. Appl. Probab. 1995, 27, 584. [Google Scholar]
- Grall, A.; Berenguer, C.; Dieulle, L. A condition-based maintenance policy for stochastically deteriorating systems. Reliab. Eng. Syst. Saf. 2002, 76, 167–180. [Google Scholar] [CrossRef]
- Dieulle, L.; Berenguer, C.; Grall, A.; Roussignol, M. Sequential condition-based maintenance scheduling for a deteriorating system. Eur. J. Oper. Res. 2003, 150, 451–461. [Google Scholar] [CrossRef]
- Deloux, E.; Castanier, B.; Bérenguer, C. An adaptive condition-based maintenance policy with environmental factors. In Risk and Decision Analysis in Maintenance Optimization and Flood Management; Kallen, M.J., Kuniewski, S.P., Eds.; IOS Press: Amsterdam, The Netherlands, 2009; pp. 137–148. [Google Scholar]
- Grall, A.; Dieulle, L.; Berenguer, C.; Roussignol, M. Continuous-time predictive-maintenance scheduling for a deteriorating system. IEEE Trans. Reliab. 2002, 51, 141–150. [Google Scholar] [CrossRef]
- Huynh, K.T.; Barros, A.; Bérenguer, C.; Castro, I. A periodic inspection and replacement policy for systems subject to competing failure modes due to degradation and traumatic events. Reliab. Eng. Syst. Saf. 2011, 96, 497–508. [Google Scholar] [CrossRef]
- Wang, H.K.; Huang, H.Z.; Li, Y.F.; Yang, Y.J. Condition-based maintenance with scheduling threshold and maintenance threshold. IEEE Trans. Reliab. 2016, 65, 513–524. [Google Scholar] [CrossRef]
- Guo, C.; Bai, Y.; Jia, Y. Maintenance optimization for systems with non-stationary degradation and random shocks. In Proceedings of the 9th IMA International Conference on Modelling in Industrial Maintenance and Reliability, London, UK, 12–14 July 2016; pp. 77–83. [Google Scholar]
- Liu, B.; Xie, M.; Kuo, W. Condition-based maintenance for degrading systems with state-dependent operating cost. In Proceedings of the 9th IMA International Conference on Modelling in Industrial Maintenance and Reliability, London, UK, 12–14 July 2016; pp. 121–126. [Google Scholar]
- Flage, R.; Coit, D.W.; Luxhoj, J.T.; Aven, T. Safety constraints applied to an adaptive Bayesian condition-based maintenance optimization model. Reliab. Eng. Syst. Saf. 2012, 102, 16–26. [Google Scholar] [CrossRef]
- Deloux, E.; Castanier, B.; Bérenguer, C. Environmental information adaptive condition-based maintenance policies. Struct. Infrastruct. Eng. 2012, 8, 373–382. [Google Scholar] [CrossRef]
- He, K.; Maillart, L.M.; Prokopyev, O.A. Scheduling preventive maintenance as a function of an imperfect inspection interval. IEEE Trans. Reliab. 2015, 64, 983–997. [Google Scholar] [CrossRef]
- Kallen, M.; Noortwijk, J. Optimal maintenance decisions under imperfect inspection. Reliab. Eng. Syst. Saf. 2005, 90, 177–185. [Google Scholar] [CrossRef]
- Newby, M.; Dagg, R. Optimal inspection policies in the presence of covariates. In Proceedings of the European Safety and Reliability Conference (ESREL’02), Lyon, France, 19–21 March 2002; pp. 131–138. [Google Scholar]
- Ye, Z.; Chen, N.; Tsui, K.L. A Bayesian approach to condition monitoring with imperfect inspections. Qual. Reliab. Eng. Int. 2015, 31, 513–522. [Google Scholar] [CrossRef]
- Tang, S.; Yu, C.; Wang, X.; Guo, X.; Si, X. Remaining useful life prediction of lithium-ion batteries based on the Wiener process with measurement error. Energies 2014, 7, 520–547. [Google Scholar] [CrossRef]
- Lam, Y. An inspection-repair-replacement model for a deteriorating system with unobservable state. J. Appl. Probab. 2003, 40, 1031–1042. [Google Scholar]
- Badıa, F.; Berrade, M.D.; Campos, C.A. Optimal inspection and preventive maintenance of units with revealed and unrevealed failures. Reliab. Eng. Syst. Saf. 2002, 78, 157–163. [Google Scholar] [CrossRef]
- Berrade, M.; Cavalcante, A.; Scarf, P. Maintenance scheduling of a protection system subject to imperfect inspection and replacement. Eur. J. Oper. Res. 2012, 218, 716–725. [Google Scholar] [CrossRef]
- Zequeira, R.I.; Berenguer, C. Optimal scheduling of non-perfect inspections. IMA J. Manag. Math. 2006, 17, 187–207. [Google Scholar] [CrossRef]
- Berrade, M.D.; Scarf, P.A.; Cavalcante, C.A.V.; Dwight, R.A. Imperfect inspection and replacement of a system with a defective state. A cost and reliability analysis. Reliab. Eng. Syst. Saf. 2013, 120, 80–87. [Google Scholar] [CrossRef]
- Alaswad, S.; Xiang, Y. A review on condition-based maintenance optimization models for stochastically deteriorating system. Reliab. Eng. Syst. Saf. 2017, 157, 54–63. [Google Scholar] [CrossRef]
- Walpole, R.; Myers, R.; Myers, S.; Ye, K. Probability and Statistics for Engineers and Scientists, 9th ed.; Pearson Prentice Hall: Boston, MA, USA, 2012; pp. 211–217. [Google Scholar]
- Ma, C.; Shao, Y.; Ma, R. Analysis of equipment fault prediction based on metabolism combined model. J. Mach. Manuf. Autom. 2013, 2, 58–62. [Google Scholar]
- 80K-40 High Voltage Probe-Fluke Corporation. Available online: https://dam-assets.fluke.com/s3fs-public/80k40___iseng0900.pdf (accessed on 1 March 1997).
- Besnard, F.; Bertling, L. An approach for condition-based maintenance optimization applied to wind turbine blades. IEEE Trans. Sustain. Energy 2010, 1, 77–83. [Google Scholar] [CrossRef]
- Sutherland, H. A Summary of the fatigue properties of wind turbine materials. Wind Energy 2000, 3, 1–34. [Google Scholar] [CrossRef]
- Wang, Z.; Xue, X.; Yin, H.; Jiang, Z.; Li, Y. Research progress on monitoring and separating suspension particles for lubricating oil. Complexity 2018, 1–9. [Google Scholar] [CrossRef]
- Coronado, D.; Fisher, K. Condition Monitoring of Wind Turbines: State of the Art, User Experience, and Recommendations. Project Report. Available online: https://www.semanticscholar.org/paper/CONDITION-MONITORING-OF-WIND-TURBINES-%3A-STATE-OF-%2C-Coronado Fischer/477fabdc00482a7f1265efc5fbc5ee15db66d353 (accessed on 1 June 2015).
- Sood, B.; Severn, L.; Osterman, M.; Pecht, M.; Bougaev, A.; McElfresh, D. Lithium-ion battery degradation mechanisms and failure analysis methodology. In Proceedings of the 38th International Symposium for Testing and Failure Analysis, Phoenix, AZ, USA, 11–15 November 2012. [Google Scholar]
- Zhai, Q.; Ye, Z.-S. RUL prediction of deteriorating products using an adaptive Wiener process model. IEEE Trans. Ind. Inform. 2017, 13, 2911–2921. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Condition Monitoring, i | Current Moment of Condition Monitoring, (h) | Next Moment of Condition Monitoring, (h) | Optimal Preventive Maintenance Threshold, (kV) | Minimal Value of Shannon Entropy, , (bit) |
|---|---|---|---|---|
| 1 | 100 | 200 | 0 | |
| 2 | 200 | 300 | 0.006 | |
| 3 | 300 | 400 | 23.6 | 0.27 |
| 4 | 400 | 500 | 23.7 | 0.45 |
| 5 | 500 | 600 | 23.84 | 0.38 |
| 6 | 600 | 700 | 23.95 | 0.26 |
| 7 | 700 | 800 | 24.08 | 0.17 |
| 8 | 800 | 900 | 24.18 | 0.11 |
| 9 | 900 | 1000 | 24.25 | 0.08 |
| 10 | 1000 | 1100 | 24.4 | 0.06 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Raza, A.; Ulansky, V. Optimization of Condition Monitoring Decision Making by the Criterion of Minimum Entropy. Entropy 2019, 21, 1193. https://doi.org/10.3390/e21121193
Raza A, Ulansky V. Optimization of Condition Monitoring Decision Making by the Criterion of Minimum Entropy. Entropy. 2019; 21(12):1193. https://doi.org/10.3390/e21121193
Chicago/Turabian StyleRaza, Ahmed, and Vladimir Ulansky. 2019. "Optimization of Condition Monitoring Decision Making by the Criterion of Minimum Entropy" Entropy 21, no. 12: 1193. https://doi.org/10.3390/e21121193
APA StyleRaza, A., & Ulansky, V. (2019). Optimization of Condition Monitoring Decision Making by the Criterion of Minimum Entropy. Entropy, 21(12), 1193. https://doi.org/10.3390/e21121193