Fault Detection for Vibration Signals on Rolling Bearings Based on the Symplectic Entropy Method

Abstract
:1. Introduction
2. Methodology
2.1. Symplectic Entropy (SymEn)
2.2. Approximate Entropy (ApEn)
2.3. Sample Entropy (SampEn)
2.4. Fuzzy Entropy (FuzzyEn)
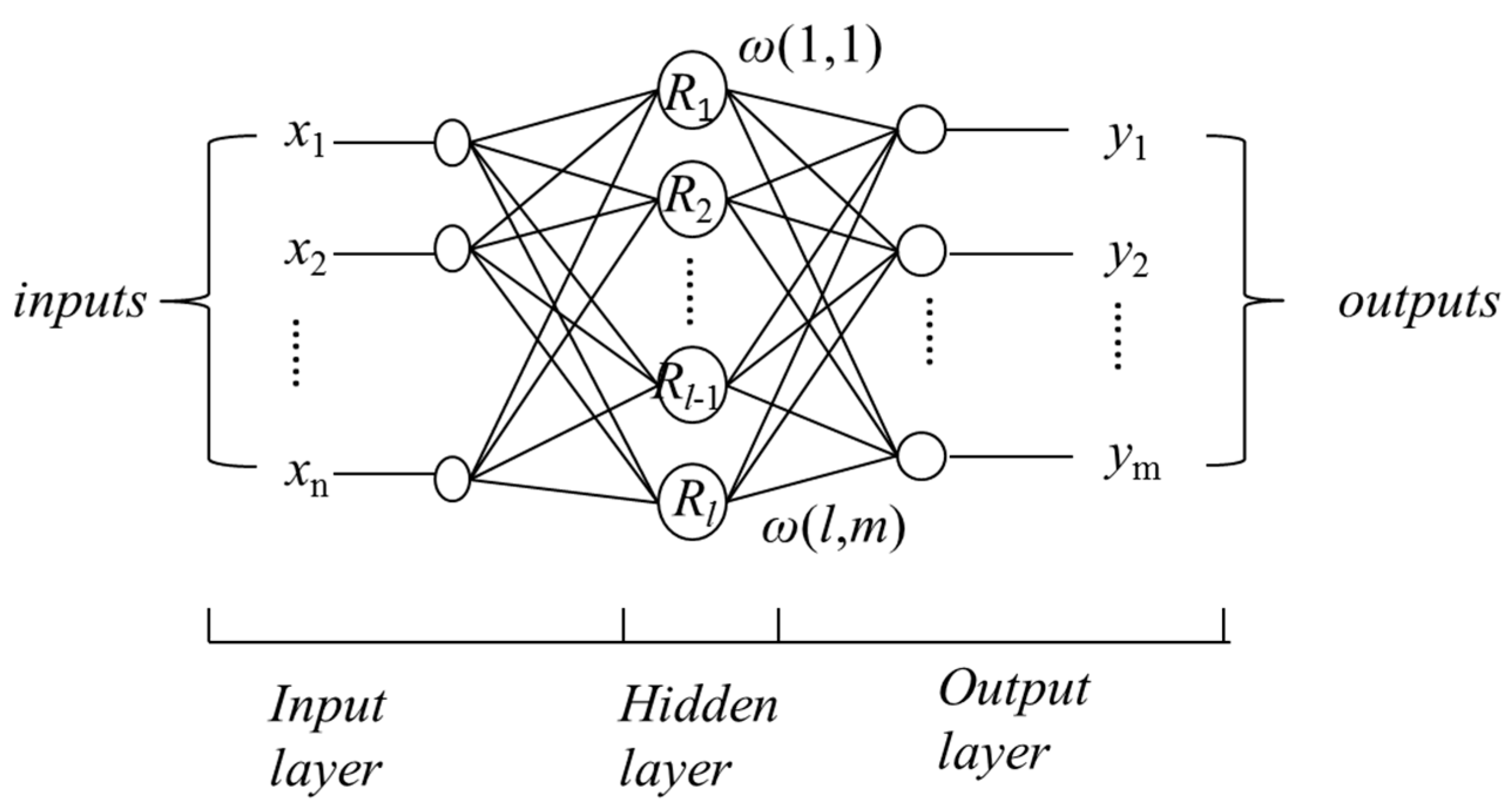
2.5. Radial Basis Function (RBF) Classifier
3. Materials
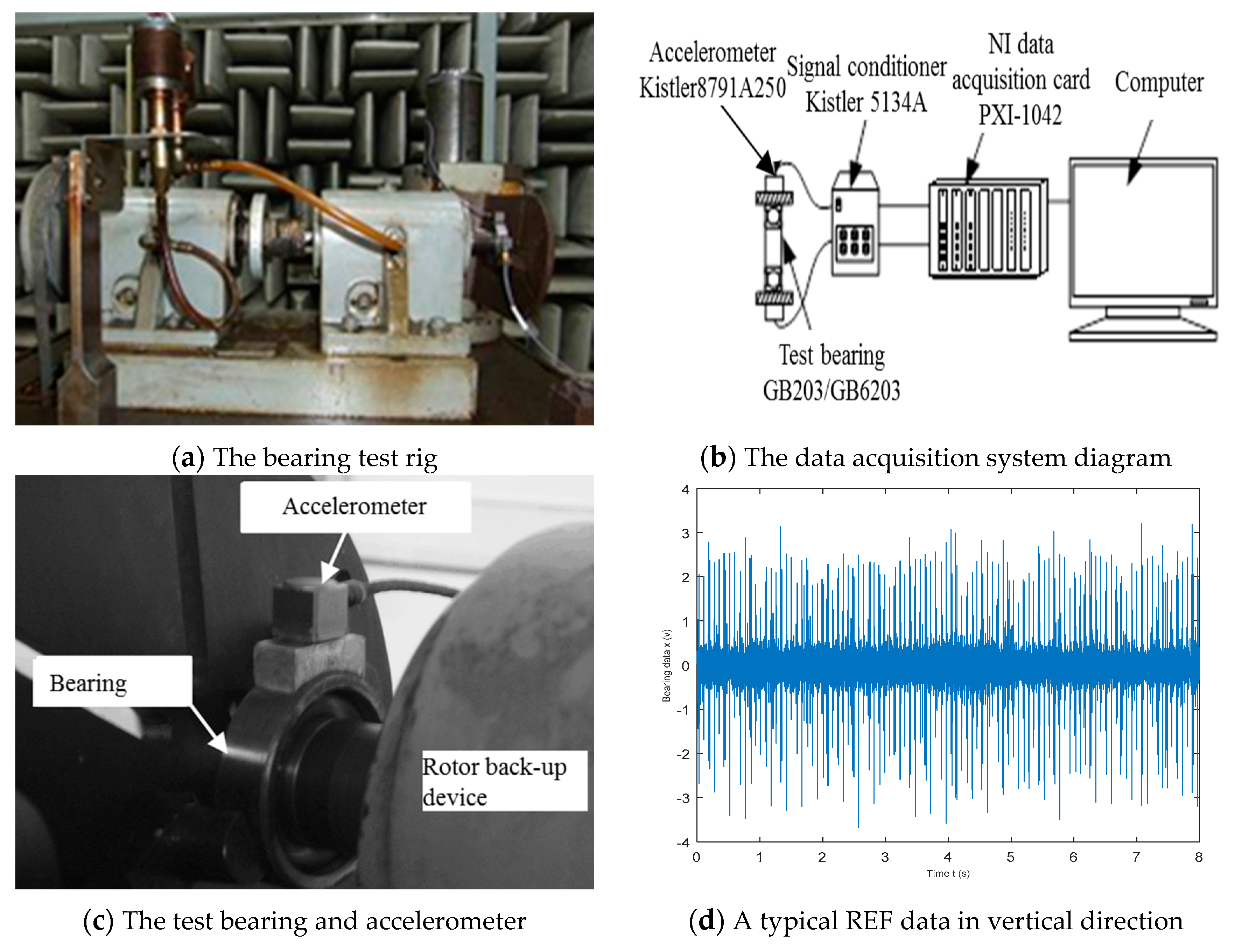
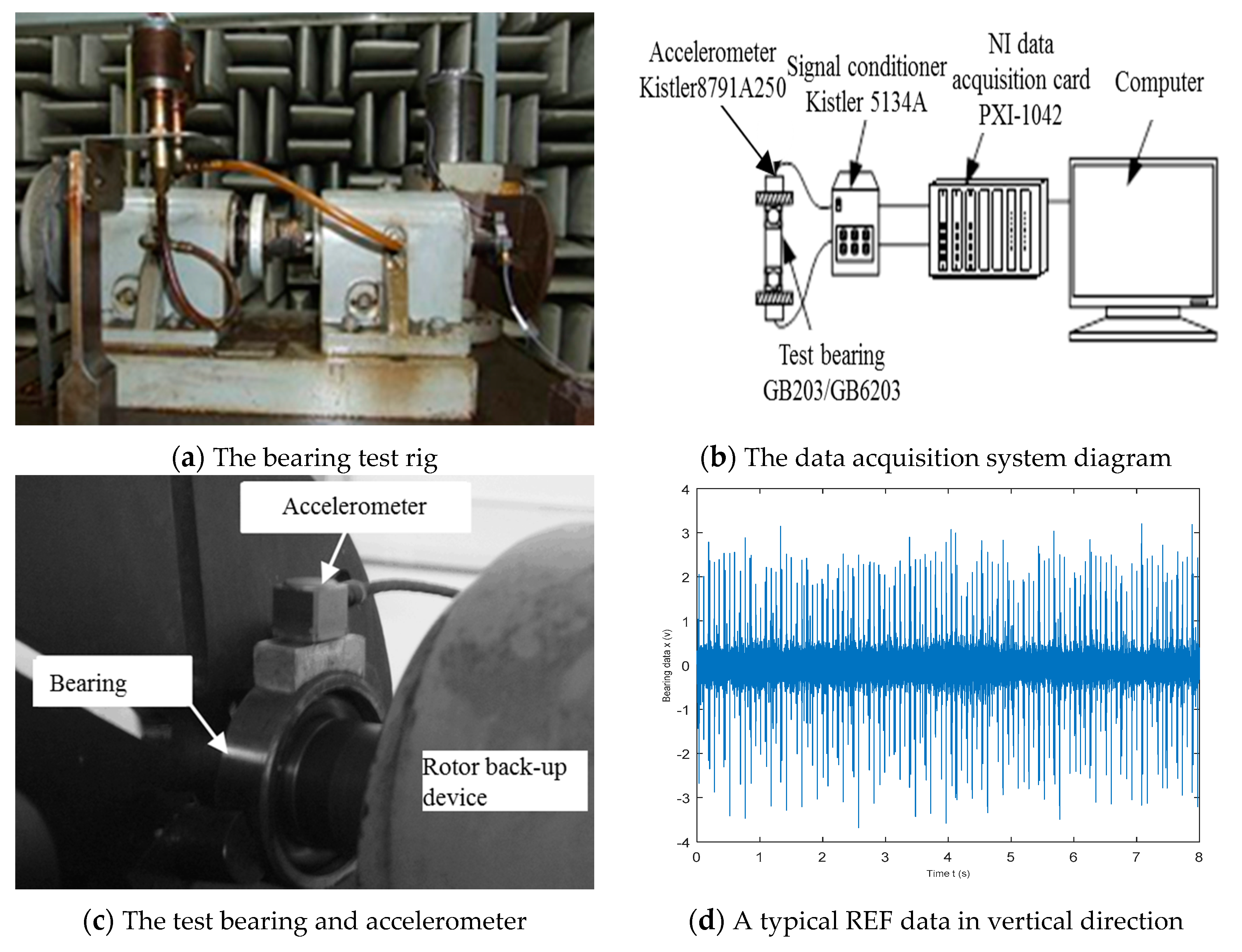
3.1. Case 1: Experimental Vibration Time Series for the Rolling Bearings
3.2. Case 2: Standard Reference Data Sets in the CWRU Bearing Database
4. Results and Analysis
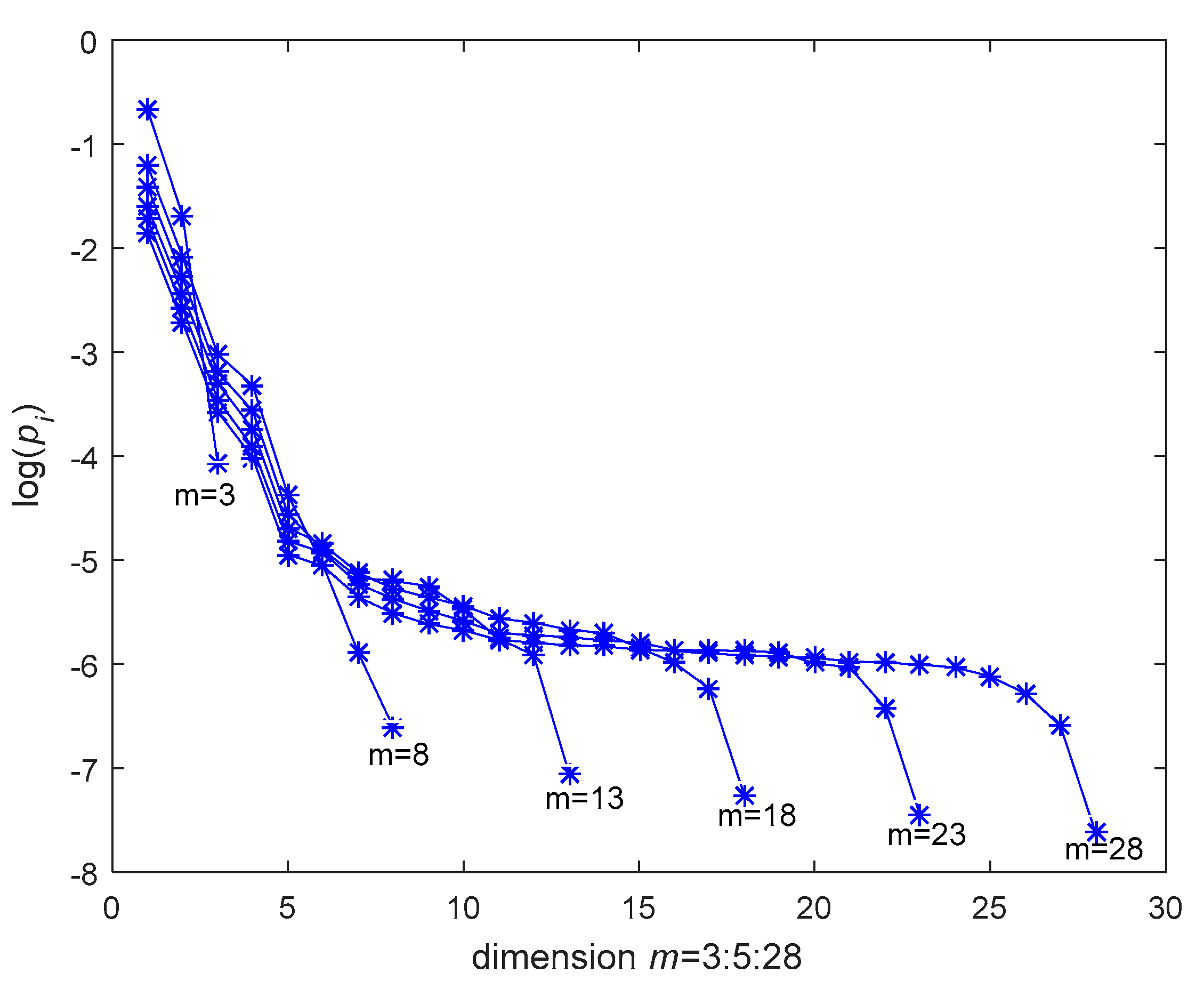
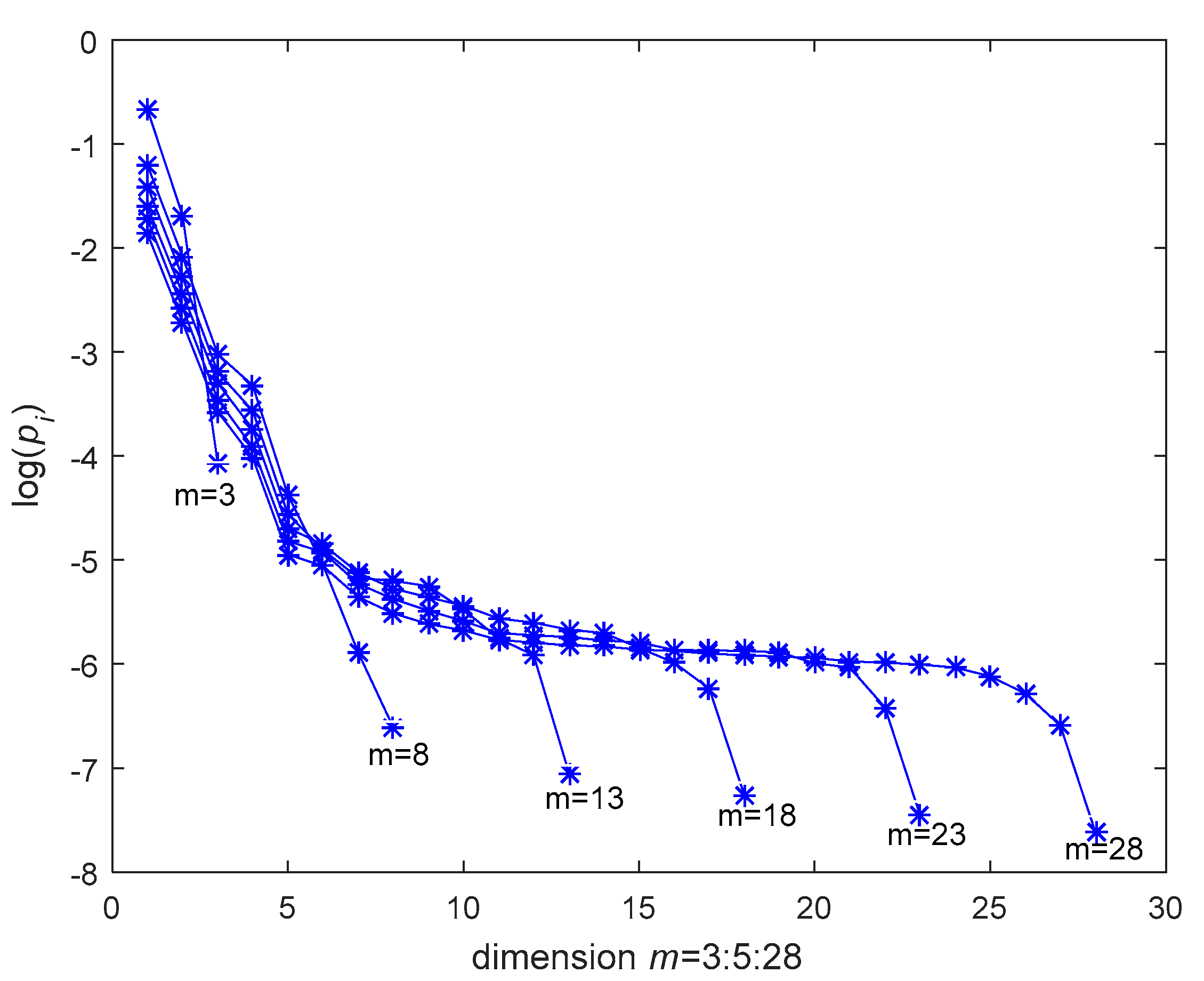
4.1. Dimension Analysis of Vibration Signals for the Rolling Bearing
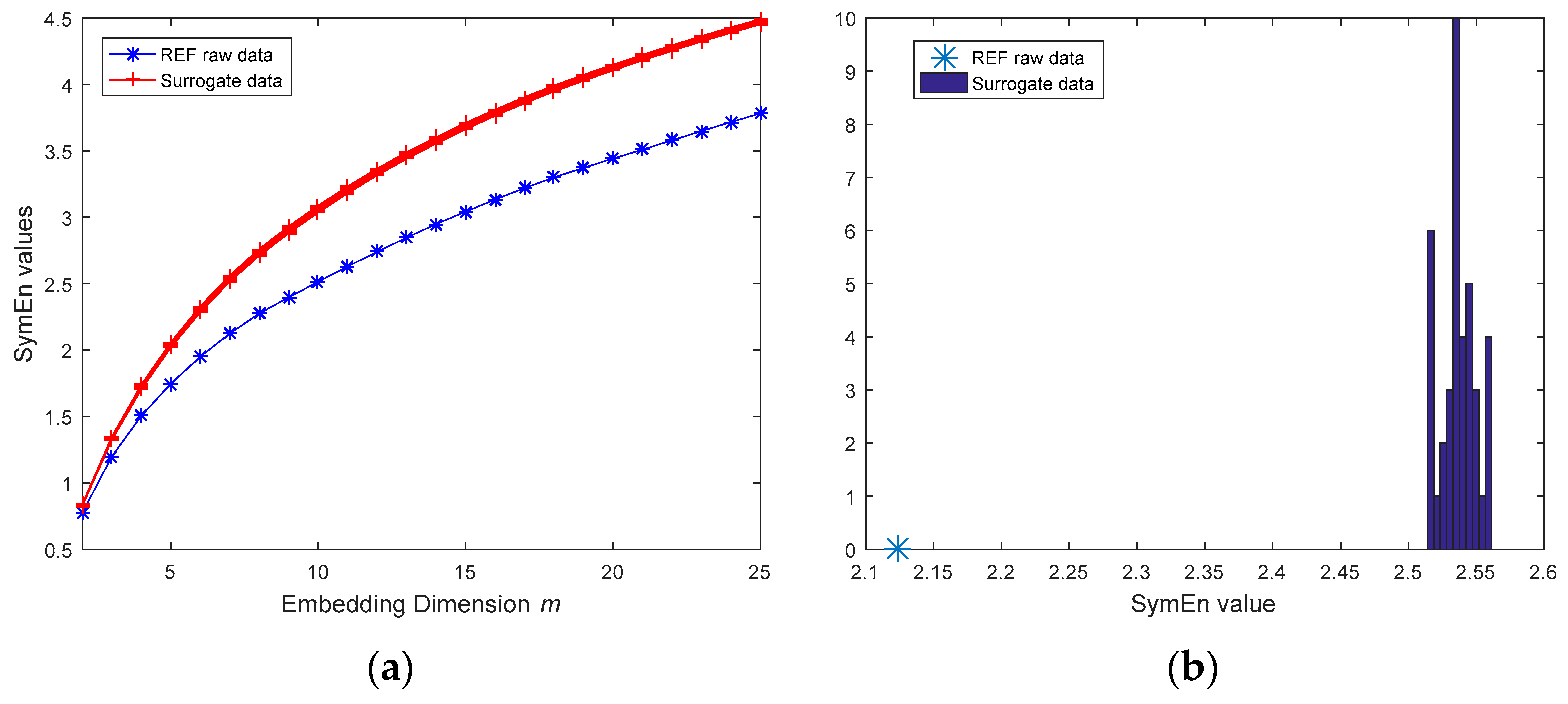
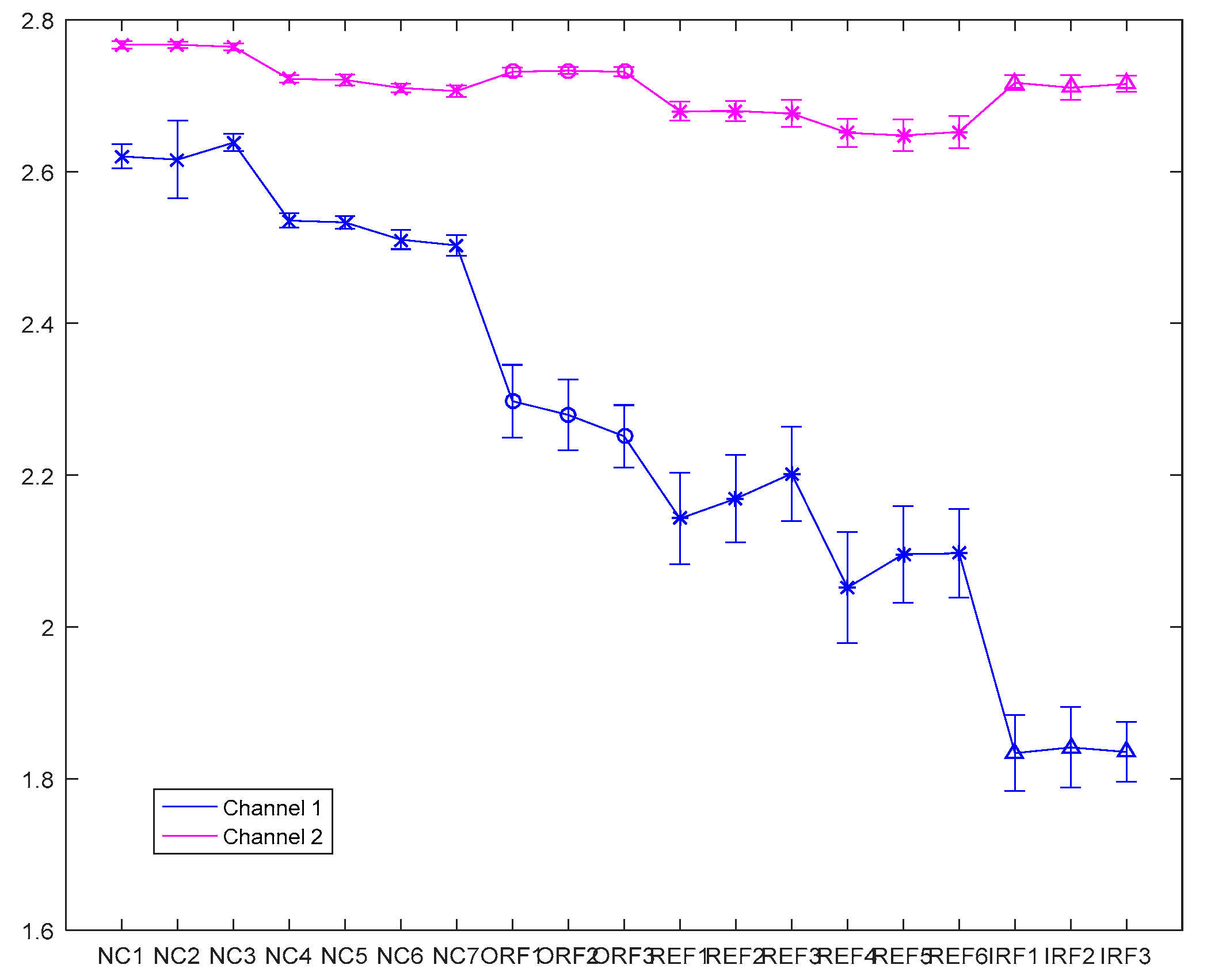
4.2. SymEn Analysis of Vibration Signals for the Rolling Bearing
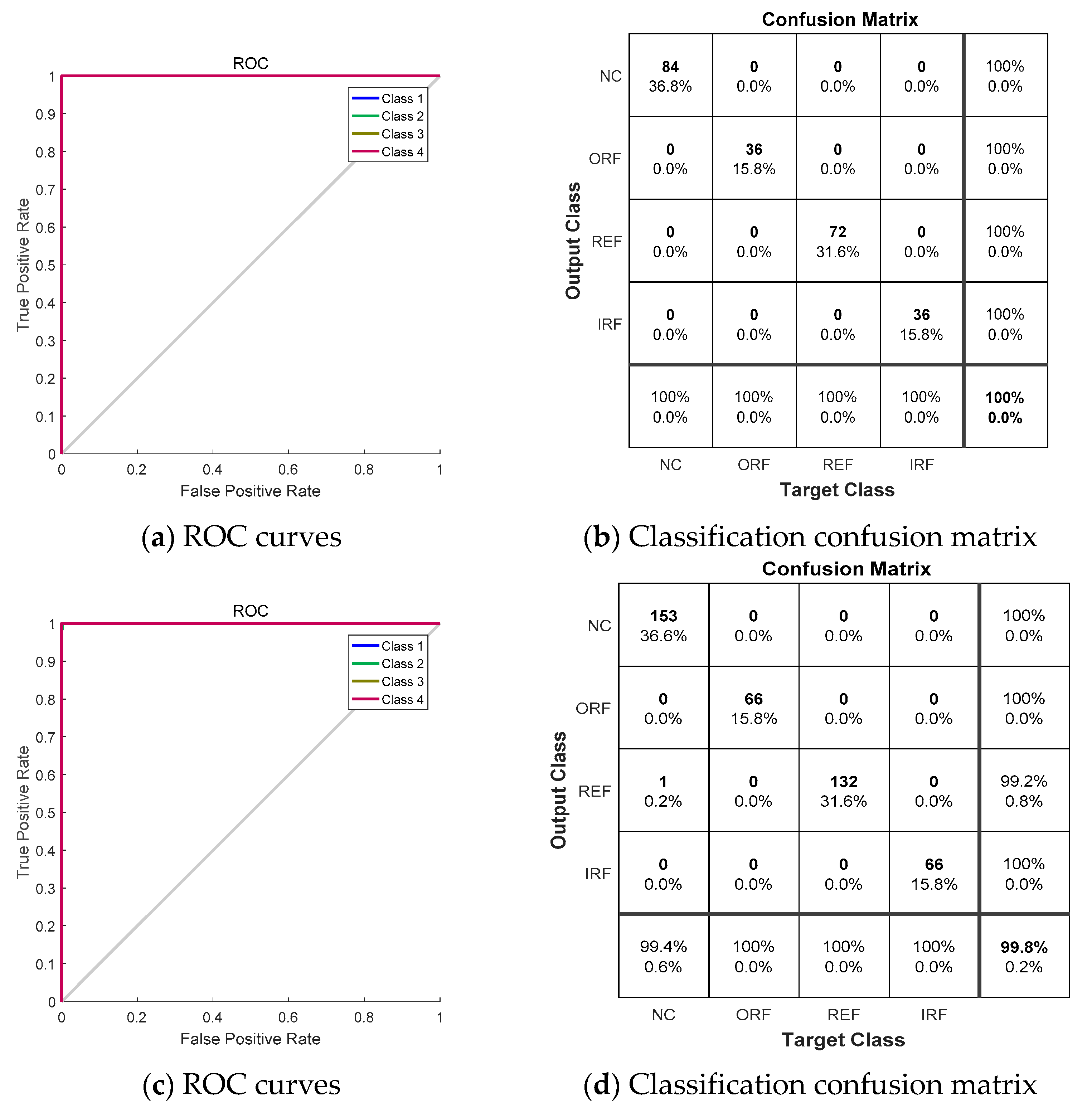
4.3. Fault Detection of Vibration Signals for the Rolling Bearing Based on SymEn
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Shah, D.S.; Patel, V.N. A review of dynamic modeling and fault identifications methods for rolling element bearing. Procedia Technol. 2014, 14, 447–456. [Google Scholar] [CrossRef]
- Sawalhi, N.; Randall, R.B. Vibration response of spalled rolling element bearings: Observations, simulations and signal processing techniques to track the spall size. Mech. Syst. Signal Process. 2011, 25, 846–870. [Google Scholar] [CrossRef]
- Henao, H.; Capolino, G.-A.; Fernandez-Cabanas, M.; Filippetti, F.; Bruzzese, C.; Strangas, E.; Pusca, R.; Estima, J.; Riera-Guasp, M.; Hedayati-Kia, S. Trends in fault diagnosis for electrical machines: A review of diagnostic techniques. IEEE Trans. Ind. Electron. Mag. 2014, 8, 31–42. [Google Scholar] [CrossRef]
- Ahmadi, A.M.; Petersen, D.; Howard, C. A nonlinear dynamic vibration model of defective bearings—The importance of modelling the finite size of rolling elements. Mech. Syst. Signal Process. 2015, 52–53, 309–326. [Google Scholar] [CrossRef]
- Tadina, M.; Boltežar, M. Improved model of a ball bearing for the simulation of vibration signals due to faults during run-up. J. Sound Vib. 2011, 330, 4287–4301. [Google Scholar] [CrossRef]
- Kankar, P.K.; Harsha, S.P.; Kumar, P.; Sharma, S.C. Fault diagnosis of a rotor bearing system using response surface method. Eur. J. Mech. A Solids 2009, 28, 841–857. [Google Scholar] [CrossRef]
- Zheng, J.; Ma, W.; Lin, J.; Ma, L.; Jia, X. Fault diagnosis approach for rotating machinery based on dynamic model and computational intelligence. Measurement 2015, 59, 73–87. [Google Scholar] [CrossRef]
- Boudiaf, A.; Moussaoui, A.; Dahane, A.; Atoui, I. A comparative study of various methods of bearing faults diagnosis using the Case Western Reserve University Data. J. Fail. Anal. Prev. 2016, 16, 271–284. [Google Scholar] [CrossRef]
- Immovilli, F.; Bellini, A.; Rubini, R.; Tassoni, C. Diagnosis of bearing faults in induction machines by vibration or current signals: A critical comparison. IEEE Trans. Ind. Appl. 2010, 46, 1350–1359. [Google Scholar] [CrossRef]
- Borghesani, P.; Pennacchi, P.; Randall, R.B.; Sawalhi, N.; Ricci, R. Application of cepstrum pre-whitening for the diagnosis of bearing faults under variable speed conditions. Mech. Syst. Signal Process. 2013, 36, 370–384. [Google Scholar] [CrossRef]
- Abboud, D.; Antoni, J.; Eltabach, M.; Sieg-Zieba, S. Angle\time cyclostationarity for the analysis of rolling element bearing vibrations. Measurement 2015, 75, 29–39. [Google Scholar] [CrossRef]
- Figlus, T.; Stanczyk, M. A method for detecting damage to rolling bearings in toothed gears of processing lines. Metalurgija 2016, 55, 75–78. [Google Scholar]
- Antoni, J. Cyclic spectral analysis of rolling-element bearing signals: Facts and fictions. Mech. Syst. Signal Process. 2007, 304, 497–529. [Google Scholar] [CrossRef]
- Straczkiewicz, M.; Czop, P.; Barszcz, T. Supervised and unsupervised learning process in damage classification of rolling element bearings. Diagnostyka 2016, 17, 71–80. [Google Scholar]
- Tabaszewski, M. Optimization of a nearest neighbors classifier for diagnosis of condition of rolling bearings. Diagnostyka 2014, 15, 37–42. [Google Scholar]
- Zhang, P.L.; Li, B.; Mi, S.S.; Zhang, Y.T.; Liu, D.S. Bearing fault detection using multi-scale fractal dimensions based on morphological covers. Shock Vib. 2012, 19, 1373–1383. [Google Scholar] [CrossRef]
- Jin, X.H.; Zhao, M.B.; Chow, T.W.S.; Pecht, M. Motor bearing fault diagnosis using trace ratio linear discriminant analysis. IEEE Trans. Ind. Electron. 2014, 61, 2441–2451. [Google Scholar] [CrossRef]
- He, Q.B.; Liu, Y.B.; Long, Q.; Wang, J. Time-frequency manifold as a signature for machine health diagnosis. IEEE Trans. Instrum. Meas. 2012, 61, 1218–1230. [Google Scholar] [CrossRef]
- Fronsini, L.; Harlisca, C.; Szabó, L. Induction machine bearing fault detection by means of statistical processing of the stray flux measurement. IEEE Trans. Ind. Electron. 2015, 62, 1846–1854. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, Y.; Zhu, Y. Intelligent fault diagnosis of rolling element bearing based on SVMs and fractal dimension. Mech. Syst. Signal Process. 2007, 21, 2012–2014. [Google Scholar] [CrossRef]
- Prieto, M.D.; Cirrincione, G.; Espionsa, A.G.; Ortega, J.A.; Henao, H. Bearing fault detection by a novel condition-monitoring scheme based on statistical-time features and neural networks. IEEE Trans. Ind. Electron. 2013, 30, 3398–3407. [Google Scholar] [CrossRef]
- Wu, S.; Wu, C.; Wu, T.; Wang, C. Multi-scale analysis based ball bearing defect diagnostics using mahalanobis distance and support vector machine. Entropy 2013, 15, 416–433. [Google Scholar] [CrossRef]
- Jiang, L.; Shi, T.; Xuan, J. Fault diagnosis of rolling bearings based on marginal fisher analysis. J. Vib. Control 2014, 20, 470–480. [Google Scholar] [CrossRef]
- Ali, J.B.; Fnaiech, N.; Saidi, L.; Chebel-Morello, B.; Fnaiech, F. Application of empirical mode decomposition and artificial neural network for automatic bearing fault diagnosis based on vibration signals. Appl. Acoust. 2015, 89, 16–27. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, Y.; Zhu, Y. Application of the multi-kernel non-negative matrix factorization on the mechanical fault diagnosis. Adv. Mech. Eng. 2015, 7, 1–11. [Google Scholar] [CrossRef]
- Wang, X.; Zheng, Y.; Zhao, Z.; Wang, J. Bearing fault diagnosis based on statistical locally linear embedding. Sensors 2015, 15, 16225–16247. [Google Scholar] [CrossRef] [PubMed]
- Mbo’o, C.P.; Hameyer, K. Fault diagnosis of bearing damage by means of the linear discriminant analysis of stator current feature from the frequency selection. IEEE Trans. Ind. Appl. 2016, 52, 3861–3868. [Google Scholar] [CrossRef]
- Sun, Y.; Xiong, Z. An optimal weighted wavelet packet entropy method with application to real-time chatter detection. IEEE/ASME Trans. Mechatron. 2016, 21, 2004–2014. [Google Scholar] [CrossRef]
- Xu, F.; Fang, Y.J.; Kong, Z.M. A fault diagnosis method based on MBSE and PSO-SVM for roller bearings. J. Vib. Eng. Technol. 2016, 4, 383–394. [Google Scholar]
- Li, W.; Zhang, S.; Rakheja, S. Feature denoising and nearest-farthest distance preserving projection for machine fault diagnosis. IEEE Trans. Ind. Inform. 2016, 12, 393–404. [Google Scholar] [CrossRef]
- Yu, J. Machinery fault diagnosis using joint global and local/nonlocal discriminant analysis with selective ensemble learning. J. Sound Vib. 2016, 382, 340–356. [Google Scholar] [CrossRef]
- Gan, M.; Wang, C.; Zhu, C. Multiple-domain manifold for feature extraction in machinery fault diagnosis. Measurement 2015, 75, 76–91. [Google Scholar] [CrossRef]
- Jung, U.; Koh, B. Wavelet energy-based visualization and classification of high-dimensional signal for bearing fault detection. Knowl. Inf. Syst. 2015, 44, 197–215. [Google Scholar] [CrossRef]
- Li, J.; Li, S.; Chen, X.; Wang, L. The hybrid KICA-GDA-LSSVM method research on rolling bearing fault feature extraction and classification. Shock Vib. 2015, 2015, 512163. [Google Scholar] [CrossRef]
- Tenenbaum, J.B.; De Silva, V.; Langford, J.C. A global geometric framework for nonlinear dimensionality reduction. Science 2000, 290, 2319–2323. [Google Scholar] [CrossRef] [PubMed]
- Roweis, S.; Saul, L. Nonlinear dimensionality reduction by locally linear embedding. Science. 2000, 290, 2323–2326. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Zhang, L.; Hu, J.F.; Xiong, G.L. Bearing fault diagnosis using a novel classifier ensemble based on lifting wavelet packet transforms and sample entropy. Shock Vib. 2016, 2016, 4805383. [Google Scholar] [CrossRef]
- Sheng, J.L.; Dong, S.J.; Liu, Z.; Gao, H.W. Fault feature extraction method based on local mean decomposition Shannon entropy and improved kernel principal component analysis model. Adv. Mech. Eng. 2016, 8, 1–8. [Google Scholar] [CrossRef]
- Zheng, J.D.; Cheng, J.S.; Yang, Y. Multiscale Permutation Entropy Based Rolling Bearing Fault Diagnosis. Shock Vib. 2014, 2014, 154291. [Google Scholar] [CrossRef]
- Lei, M.; Wang, Z.Z.; Feng, Z.J. A method of embedding dimension estimation based on symplectic geometry. Phys. Lett. A 2002, 303, 179–189. [Google Scholar] [CrossRef]
- Xie, H.; Dokos, S.; Sivakumar, B.; Mengersen, K. Symplectic geometry spectrum regression for prediction of noisy time series. Phys. Rev. E 2016, 93, 052217. [Google Scholar] [CrossRef] [PubMed]
- Lei, M.; Meng, G. Symplectic principal component analysis: A new method for time series analysis. Math. Probl. Eng. 2011, 2011, 793429. [Google Scholar] [CrossRef]
- Lei, M.; Meng, G.A. Noise Reduction Method for Continuous Chaotic Systems Based on Symplectic Geometry. J. Vib. Eng. Technol. 2015, 3, 13–24. [Google Scholar]
- Lei, M.; Meng, G.; Zhang, W.M.; Wade, J.; Sarkar, N. Symplectic Entropy as a novel measure for complex systems. Entropy 2016, 18, 412–418. [Google Scholar] [CrossRef]
- Pincus, S.M. Approximate entropy as a measure of system complexity. Proc. Natl. Acad. Sci. USA 1991, 88, 2297–2301. [Google Scholar] [CrossRef] [PubMed]
- Richman, J.; Moorman, J. Physiological time-series analysis using approximate entropy and sample entropy. Am. J. Physiol. Heart Circ. Physiol. 2000, 278, H2039–H2049. [Google Scholar] [PubMed]
- Zheng, J.D.; Cheng, J.S.; Yang, Y. A rolling bearing fault diagnosis approach based on LCD and fuzzy entropy. Mech. Mach. Theory 2013, 70, 441–453. [Google Scholar] [CrossRef]
- Lin, C.-C. Analysis of abnormal Intra-QRS potentials in signal-averaged electrocardiograms using a radial basis function neural network. Sensors 2016, 1580. [Google Scholar] [CrossRef] [PubMed]
- Haykin, S. Neural Networks: A Comprehensive Foundation, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1999. [Google Scholar]
- Zhou, H.T.; Chen, J.; Dong, G.M.; Wang, R. Detection and diagnosis of bearing faults using shift-invariant dictionary learning and hidden Markov model. Mech. Syst. Signal Process. 2016, 72–73, 65–79. [Google Scholar] [CrossRef]
- Yuan, H.; Chen, J.; Dong, G. Bearing fault diagnosis based on improved locality-constrained linear coding and adaptive PSO-optimized SVM. Math. Probl. Eng. 2017, 2017, 7257603. [Google Scholar] [CrossRef]
- Theiler, J.; Eubank, S.; Longtin, A.; Galdrikian, B. Testing for nonlinearity in time series: The method of surrogate data. Phys. D 1992, 58, 77–94. [Google Scholar] [CrossRef]
- Schreiber, T.; Schmitz, A. Improved surrogate data for nonlinearity tests. Phys. Rev. Lett. 1996, 77, 635–638. [Google Scholar] [CrossRef] [PubMed]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Pitch Diameter (mm) | Ball Diameter (mm) | Ball Number | Contact Angle (o) |
|---|---|---|---|---|
| GB203 | 28.5 | 6.747 | 7 | 0 |
| GB6203 | 28.5 | 6.747 | 8 | 0 |
| Type | NC TT (TrSN/TeSN) | ORF TT (TrSN/TeSN) | REF TT (TrSN/TeSN) | IRF TT (TrSN/TeSN) |
|---|---|---|---|---|
| GB203 | 3 (36/66) | 3 (36/66) | 3 (36/66) | 3 (36/66) |
| GB6203 | 4 (48/88) | / | 3 (36/66) | / |
| Overall | 7 (84/154) | 3 (36/66) | 6 (72/132) | 3 (36/66) |
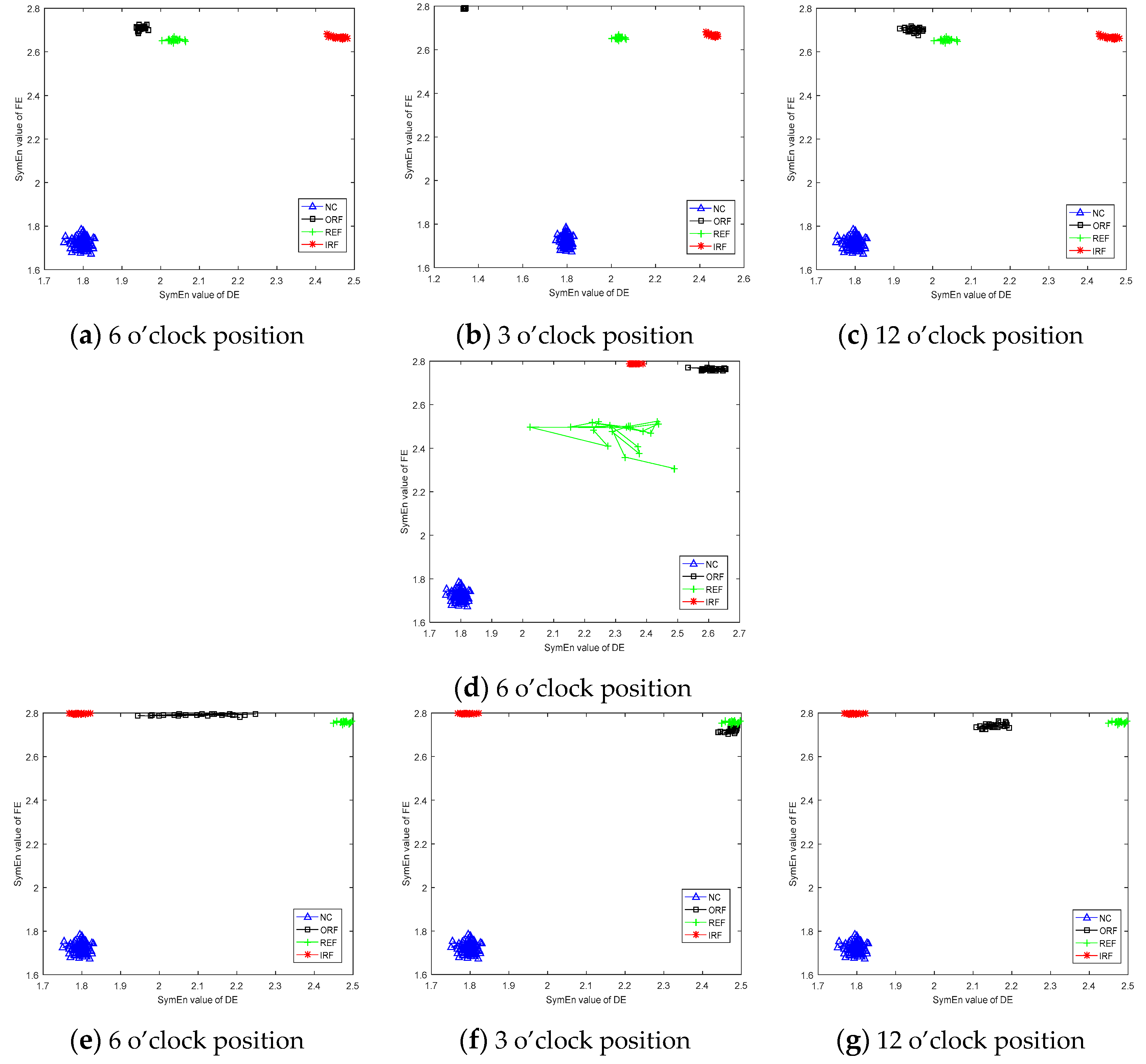
| Group Number | Fault Diameter (mm) | NC (SN) | IRF (SN) | REF (SN) | ORF (SN) |
|---|---|---|---|---|---|
| 1 | 0.18 | 100 | 108 | 121 | 133 (6 o’clock) |
| 2 | 0.18 | 100 | 108 | 121 | 147 (3 o’clock) |
| 3 | 0.18 | 100 | 108 | 121 | 160 (12 o’clock) |
| 4 | 0.36 | 100 | 172 | 188 | 200 (6 o’clock) |
| 5 | 0.53 | 100 | 212 | 225 | 237 (6 o’clock) |
| 6 | 0.53 | 100 | 212 | 225 | 249 (3 o’clock) |
| 7 | 0.53 | 100 | 212 | 225 | 261 (12 o’clock) |
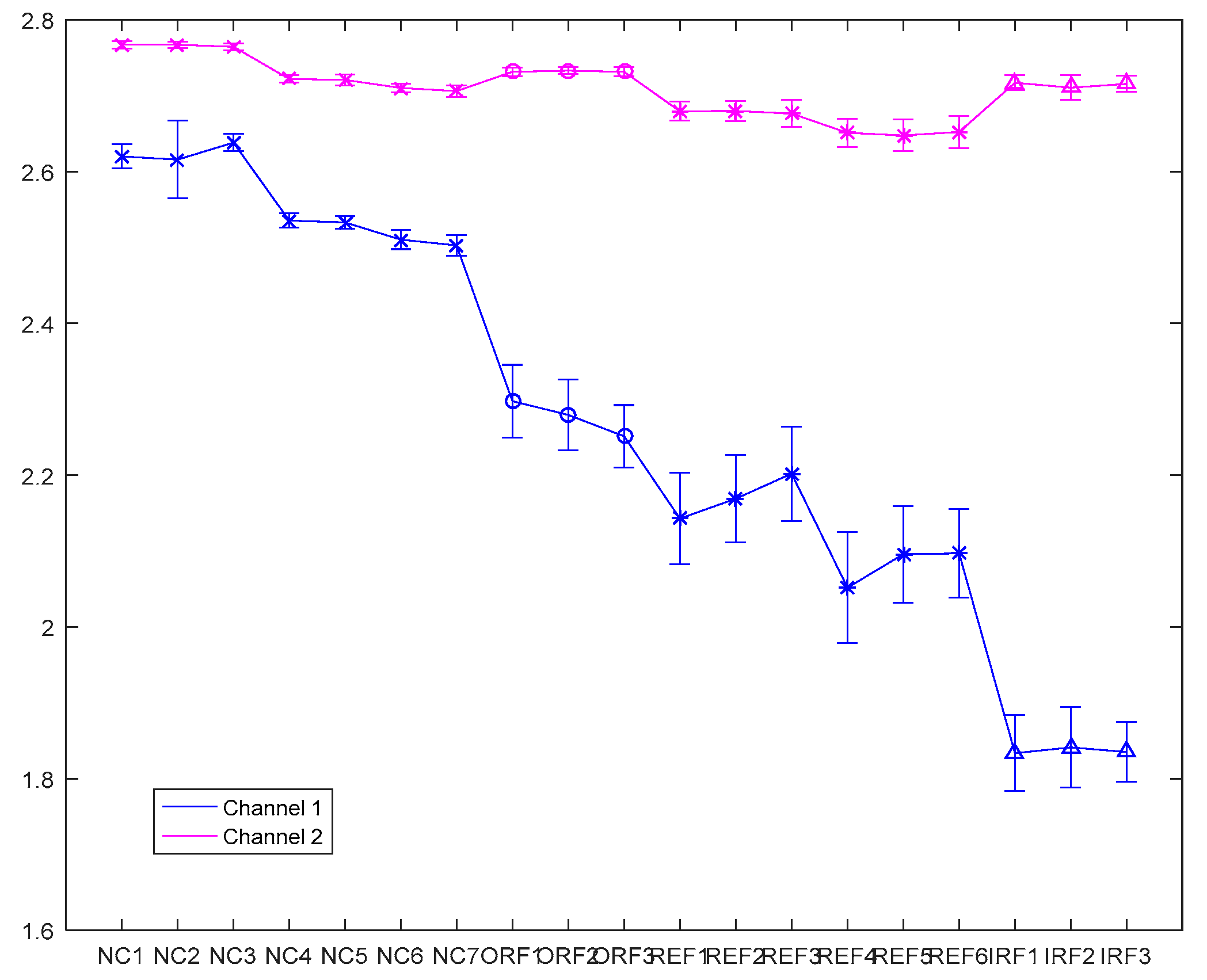
| SymEn | NC Mean ± std | ORF Mean ± std | REF Mean ± std | IRF Mean ± std |
|---|---|---|---|---|
| Channel 1 | 2.57 ± 0.06 | 2.28 ± 0.05 | 2.13 ± 0.08 | 1.84 ± 0.05 |
| Channel 2 | 2.74 ± 0.03 | 2.73 ± 0.01 | 2.66 ± 0.02 | 2.71 ± 0.01 |
| L | SymEn (%) | ApEn (%) | SampEn (%) | FuzzyEn (%) | ||||
|---|---|---|---|---|---|---|---|---|
| Training | Testing | Training | Testing | Training | Testing | Training | Testing | |
| 2000 | 95.4 | 93.7 | 93.2 | 92.3 | 90.1 | 87.9 | 91.8 | 90.4 |
| 3000 | 97.3 | 97.8 | 94.5 | 92.4 | 93.1 | 91.2 | 91.3 | 90.9 |
| 4000 | 100 | 98.9 | 97.8 | 95.5 | 93.5 | 92.6 | 94.7 | 94.3 |
| 5000 | 100 | 99 | 96.2 | 95.7 | 93.6 | 92.7 | 97.4 | 95.3 |
| 6000 | 100 | 99.8 | 96.9 | 95.2 | 93.9 | 94 | 99.6 | 95 |
| 7000 | 100 | 99.7 | 97.9 | 98.3 | 96.8 | 95 | 98.4 | 96.4 |
| 8000 | 100 | 99.7 | 99.4 | 98.4 | 94.2 | 96.4 | 100 | 97.7 |
| 9000 | 100 | 100 | 99.3 | 98.5 | 98 | 95.1 | 99.3 | 96.6 |
| 10,000 | 100 | 99.6 | 99.2 | 99.2 | 98.5 | 94.7 | 99.2 | 97.6 |
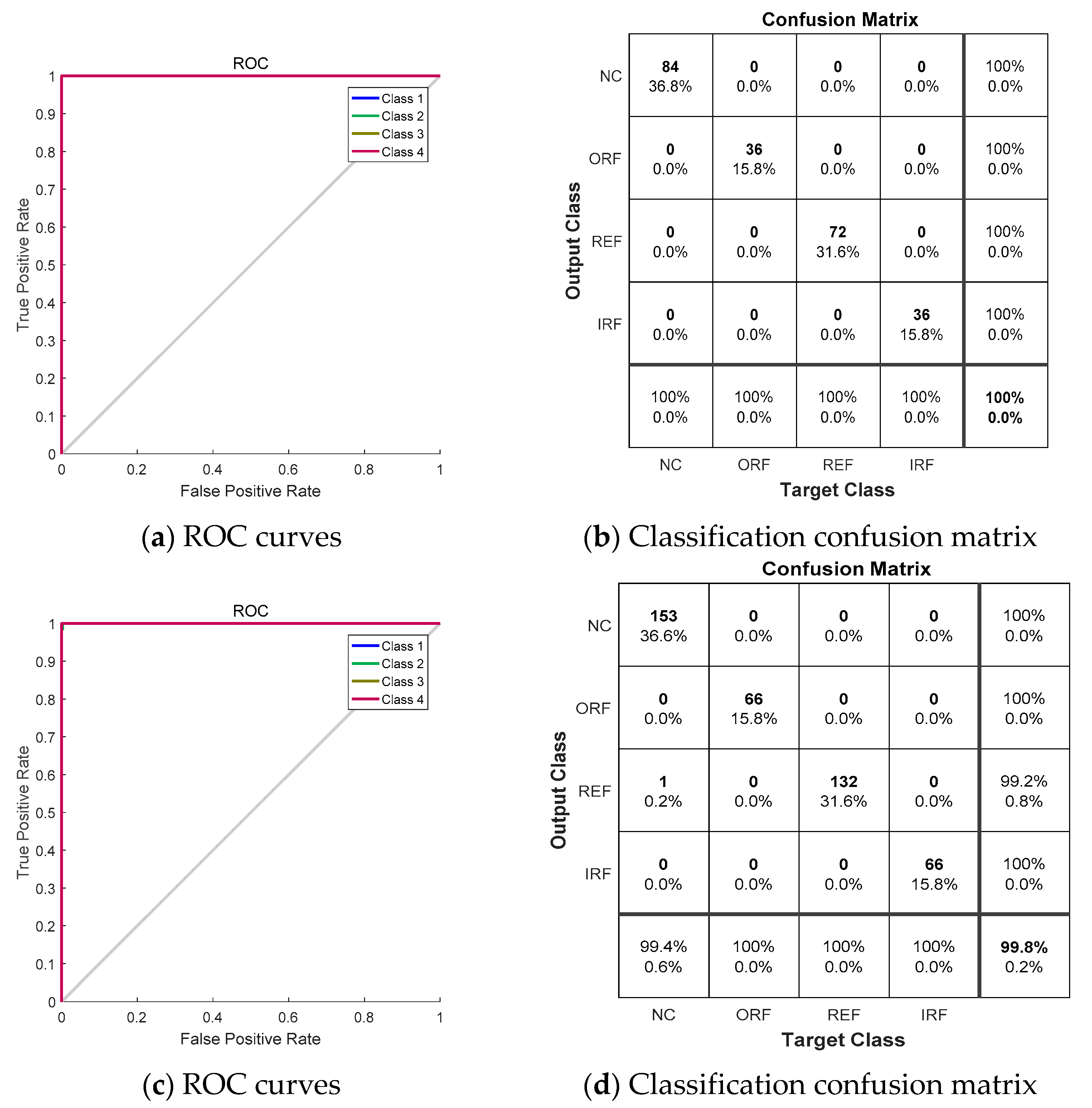
| NC | ORF | REF | IRF | Overall | |
|---|---|---|---|---|---|
| Training | 100 | 100 | 100 | 100 | 100 |
| Testing | 99.4 | 100 | 100 | 100 | 99.8 |
| Group Number | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| Training (%) | 100 | 100 | 100 | 100 | 100 | 100 | 100 |
| Testing (%) | 100 | 100 | 100 | 100 | 100 | 100 | 100 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lei, M.; Meng, G.; Dong, G. Fault Detection for Vibration Signals on Rolling Bearings Based on the Symplectic Entropy Method. Entropy 2017, 19, 607. https://doi.org/10.3390/e19110607
Lei M, Meng G, Dong G. Fault Detection for Vibration Signals on Rolling Bearings Based on the Symplectic Entropy Method. Entropy. 2017; 19(11):607. https://doi.org/10.3390/e19110607
Chicago/Turabian StyleLei, Min, Guang Meng, and Guangming Dong. 2017. "Fault Detection for Vibration Signals on Rolling Bearings Based on the Symplectic Entropy Method" Entropy 19, no. 11: 607. https://doi.org/10.3390/e19110607
APA StyleLei, M., Meng, G., & Dong, G. (2017). Fault Detection for Vibration Signals on Rolling Bearings Based on the Symplectic Entropy Method. Entropy, 19(11), 607. https://doi.org/10.3390/e19110607