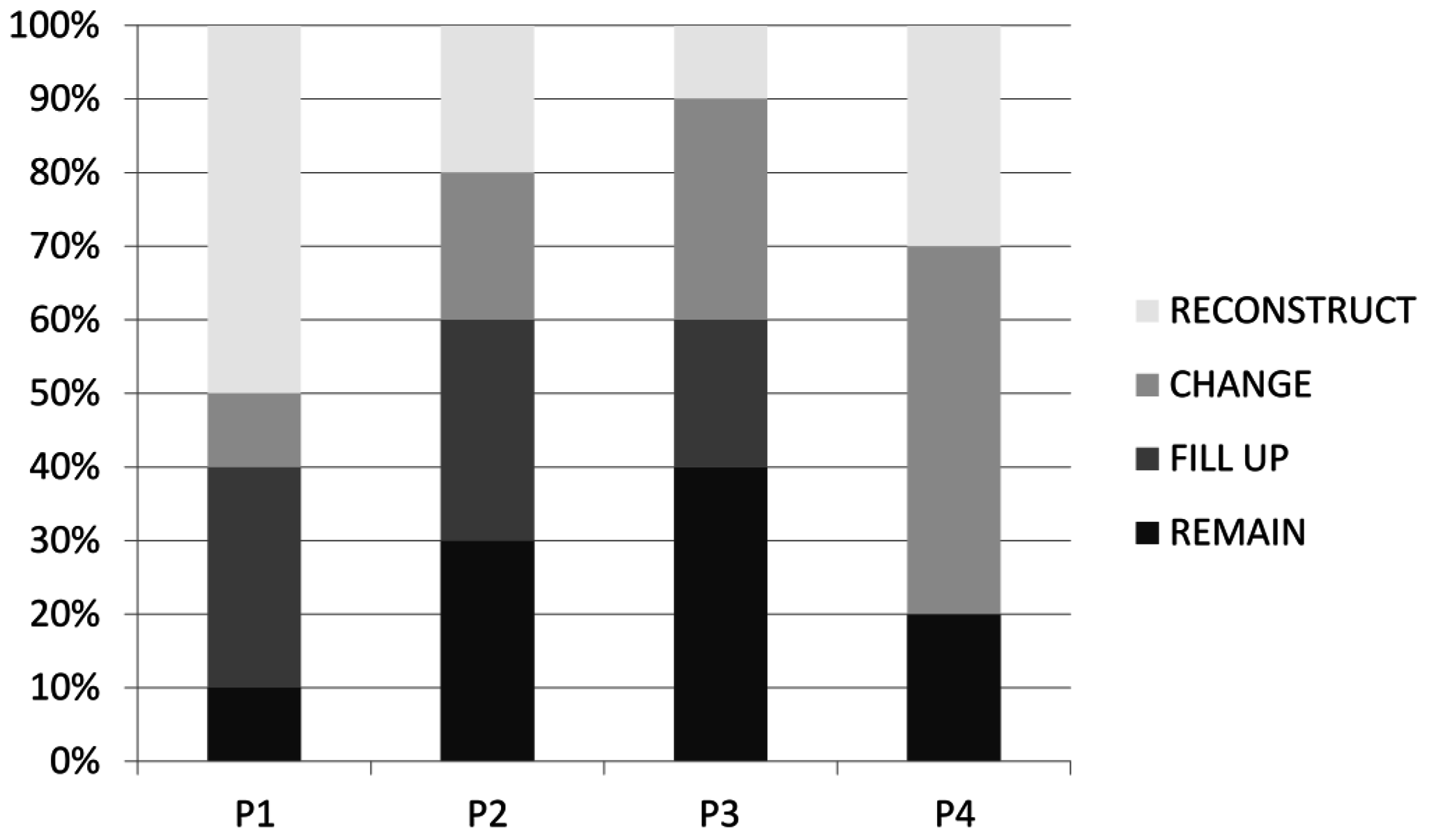
The first test simulations were run in Nekala with a first, preliminary version of the model controlled by stable parameters in the code defining the relative shares of activities on the sites. These values varied according to the number of uses on the site and the site’s current mode of transformation. The resulting pattern formation process was relatively dynamic, but it was difficult to observe how changes in the code affected these patterns.
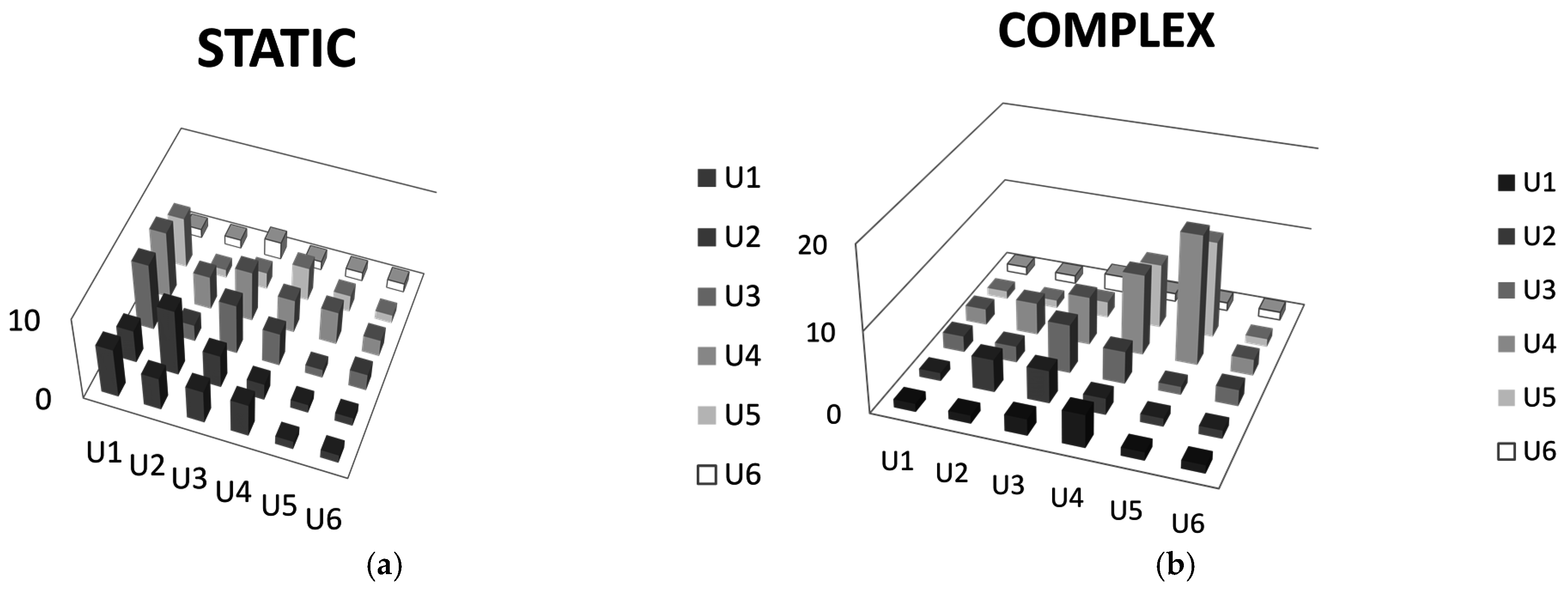
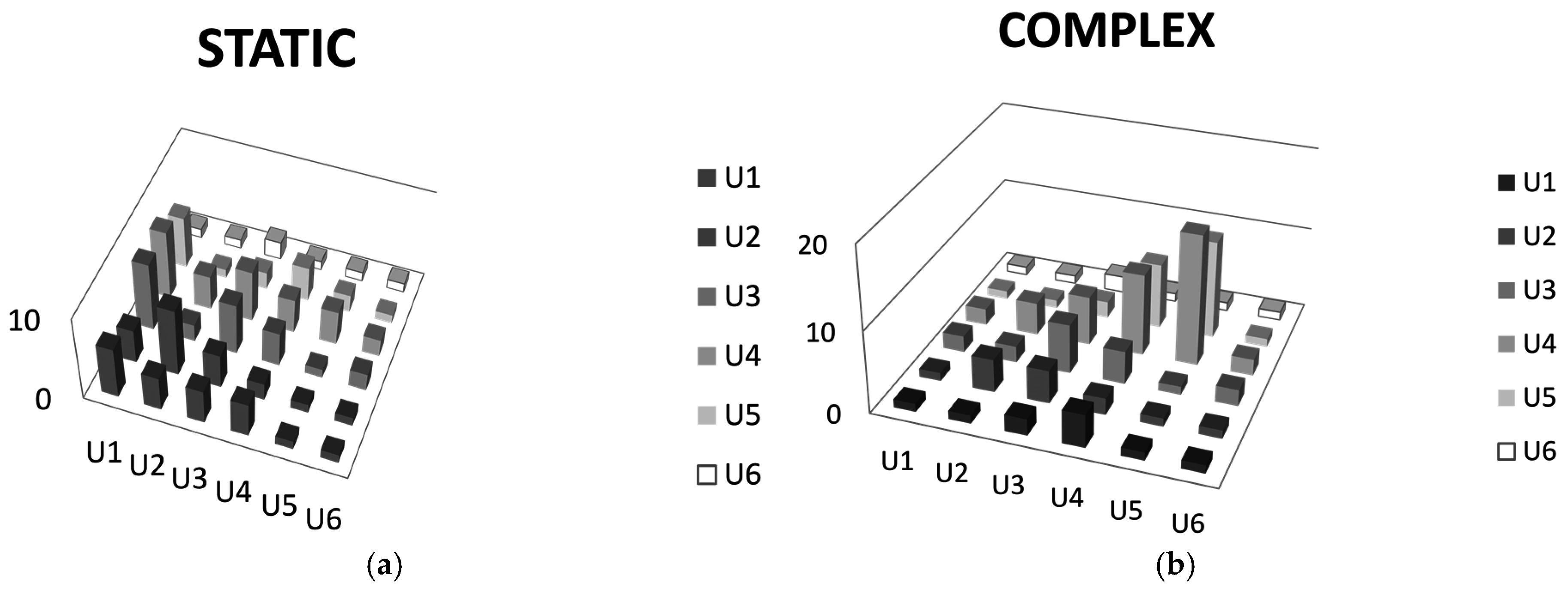
As a result of a negotiation among stakeholders in the planning process, two sets of rules were chosen for simulation. The amount of new housing in the area became a crucial question in the meetings, along with the diversity of other activities, and the first scenario was to support new housing (highest matrix values between housing, U1 × U1). The second one was based on lower weight for housing, implying more mixed uses. However, the static, preserved sites produced a certain diversity in all cases.
The objective was to observe shifts in dynamics resulting from various weight values for each activity pair. The lengths of the runs ranged from 100 to 500 iterations, but extremely long runs (1000 to 2000) were also computed for the potential temporal resilience of the dynamics.
5.2. Validation
These results were visually clearly observable. For validation, I followed the ideas of Langton [
8] and Wuenche [
13] for entropy measurement of the patterns. The entropy values for the results were calculated for the whole system after simulation. The aim was to discover the differences in overall diversity and predictability.
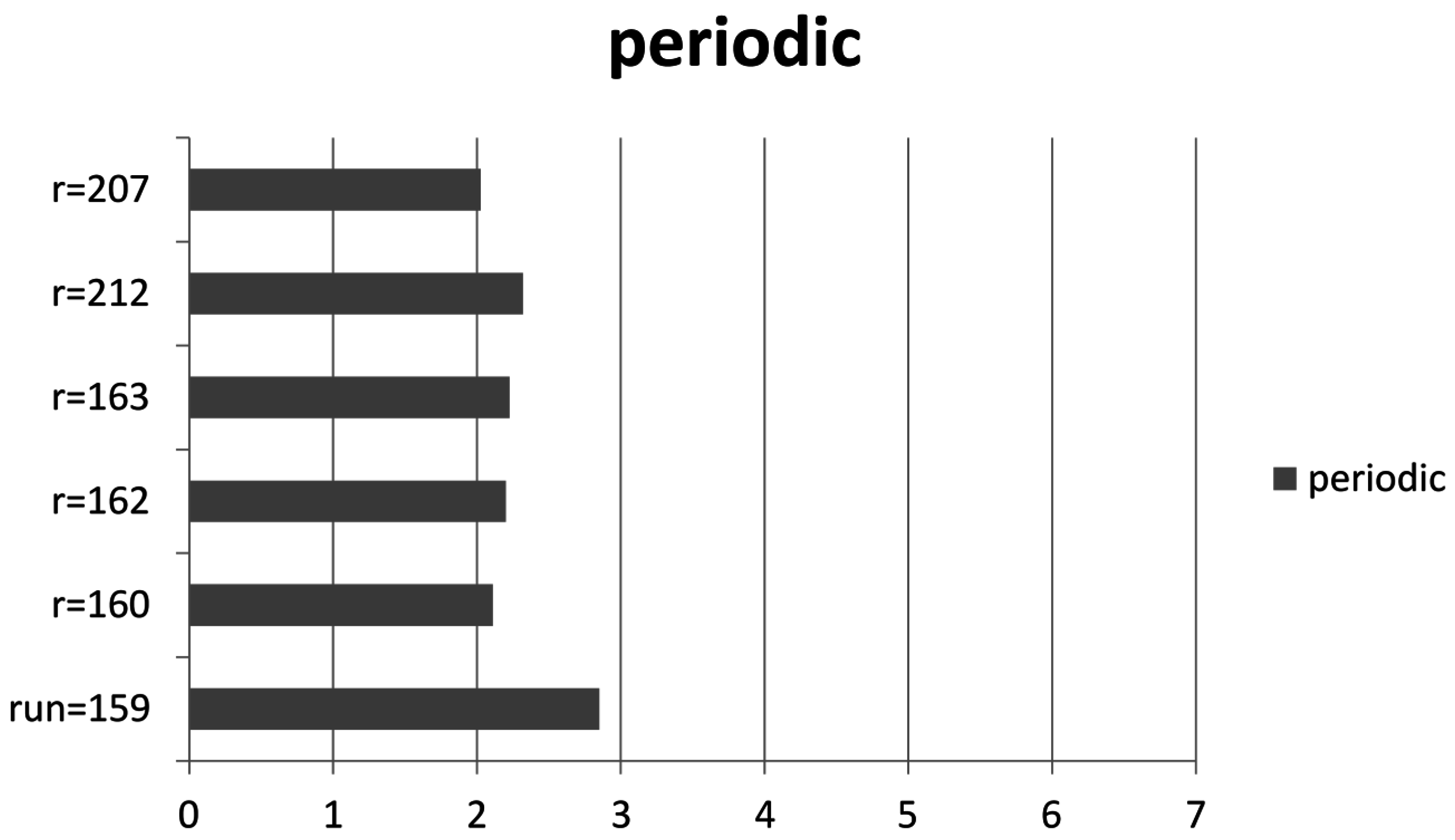
Six examples of periodic and six of complex behavior were chosen at random from the 60 data sets which passed the visual evaluation test. The entropy for the system was calculated according to Equation (2).
where
is the relative share
of the entities;
t is the number of a certain regeneration cycle; and
tall is the number of different cycles in that run. The resulting entropy values are presented in
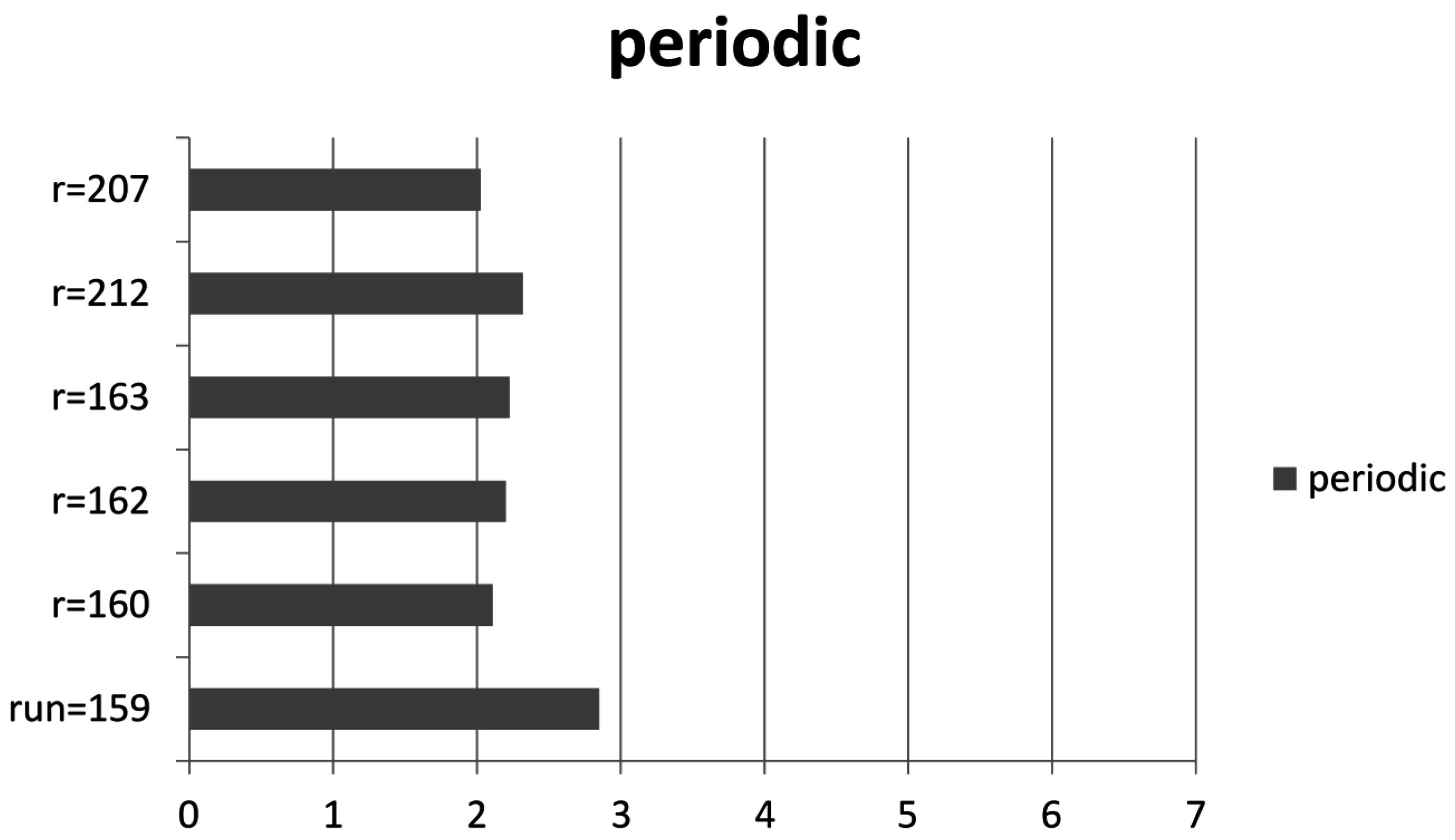
Table 10. This equation describes the overall entropy of the simulation after the runs are completed, providing an estimated level of complexity in regards of time steps between changes in utilization of building right. (For example, for a periodic run 160, the cycle of 10 occurred 72 times out of a total of 178 different cycles. Hence, for run 160,
= 72:178 = 0.040449 and consequently,
= −1.3058. Thus
= 0.5282. This calculation was carried out for each cycle (10, 11, 12, 16, 22, etc.) for the total sum, yielding the entropy value of run 160).
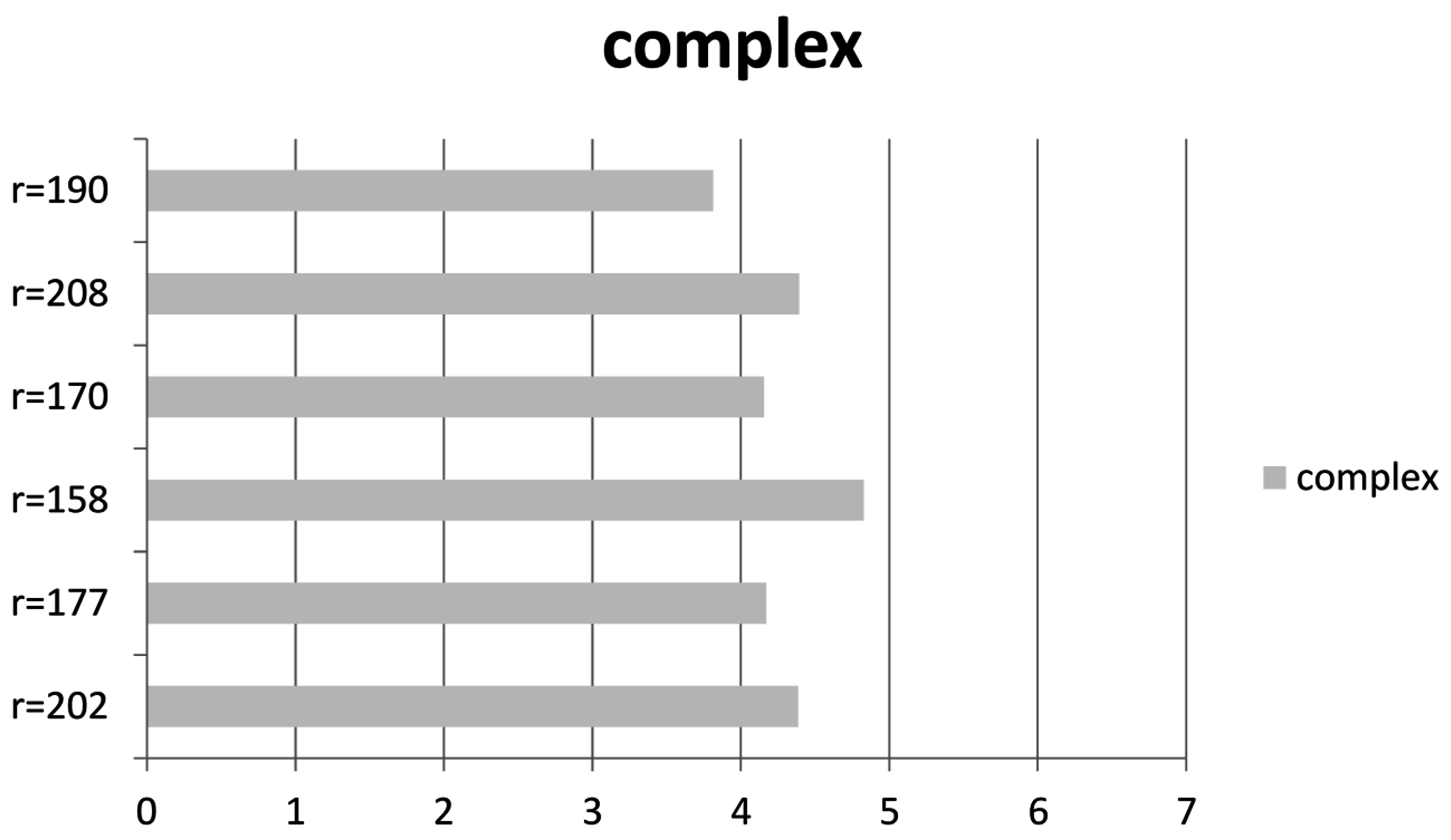
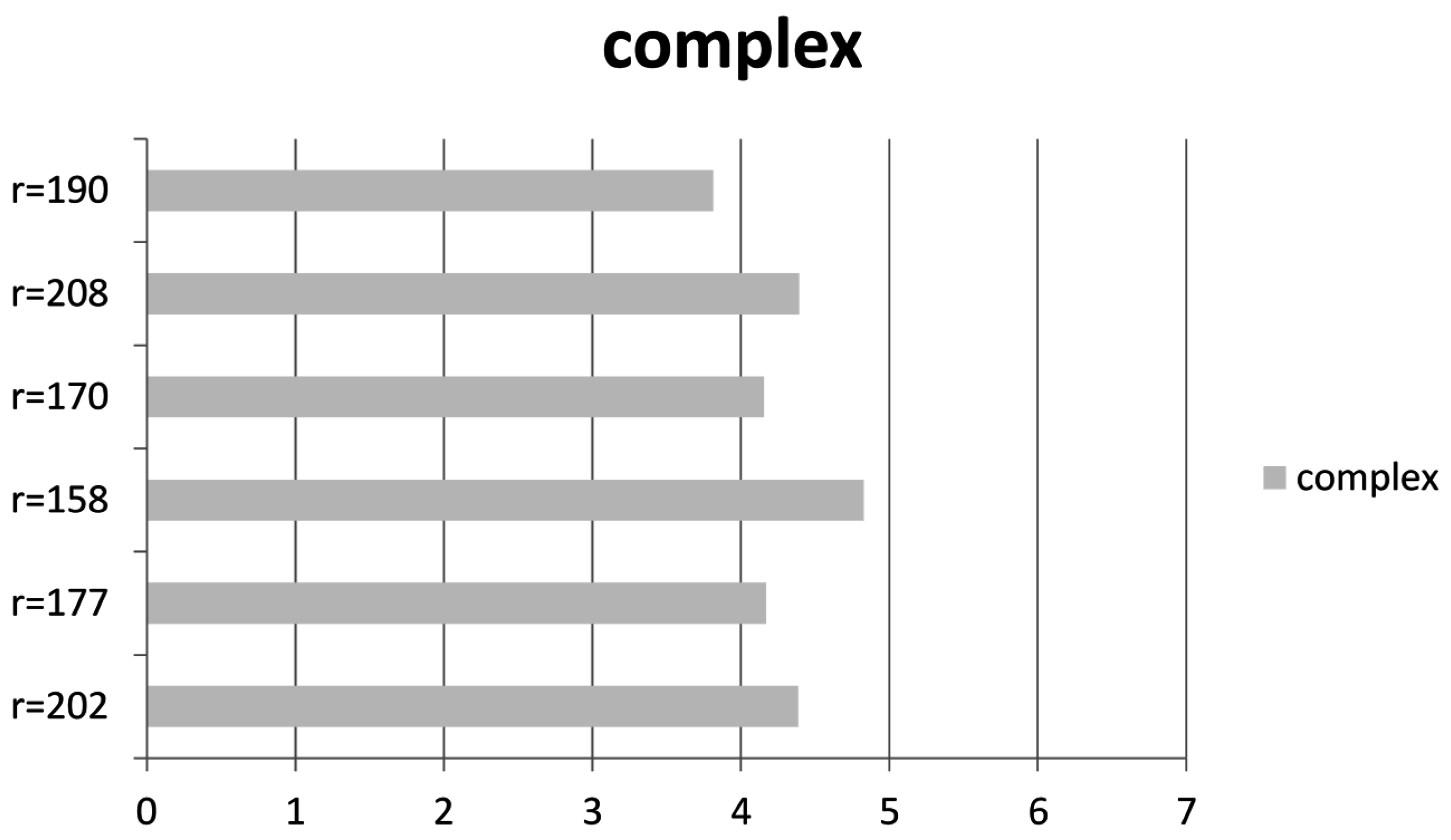
The results indicate a clear dispersion between highly ordered, periodic, and more unpredictable, complex states. All the entropy values for periodic states were below 2.86, while for complex states they ranged from 3.80 and 4.90 (
Table 8,
Figure 6 and
Figure 7) (for the graphical representation of the dynamics of these systems, see
Supplementary material, Figures S3–S14).
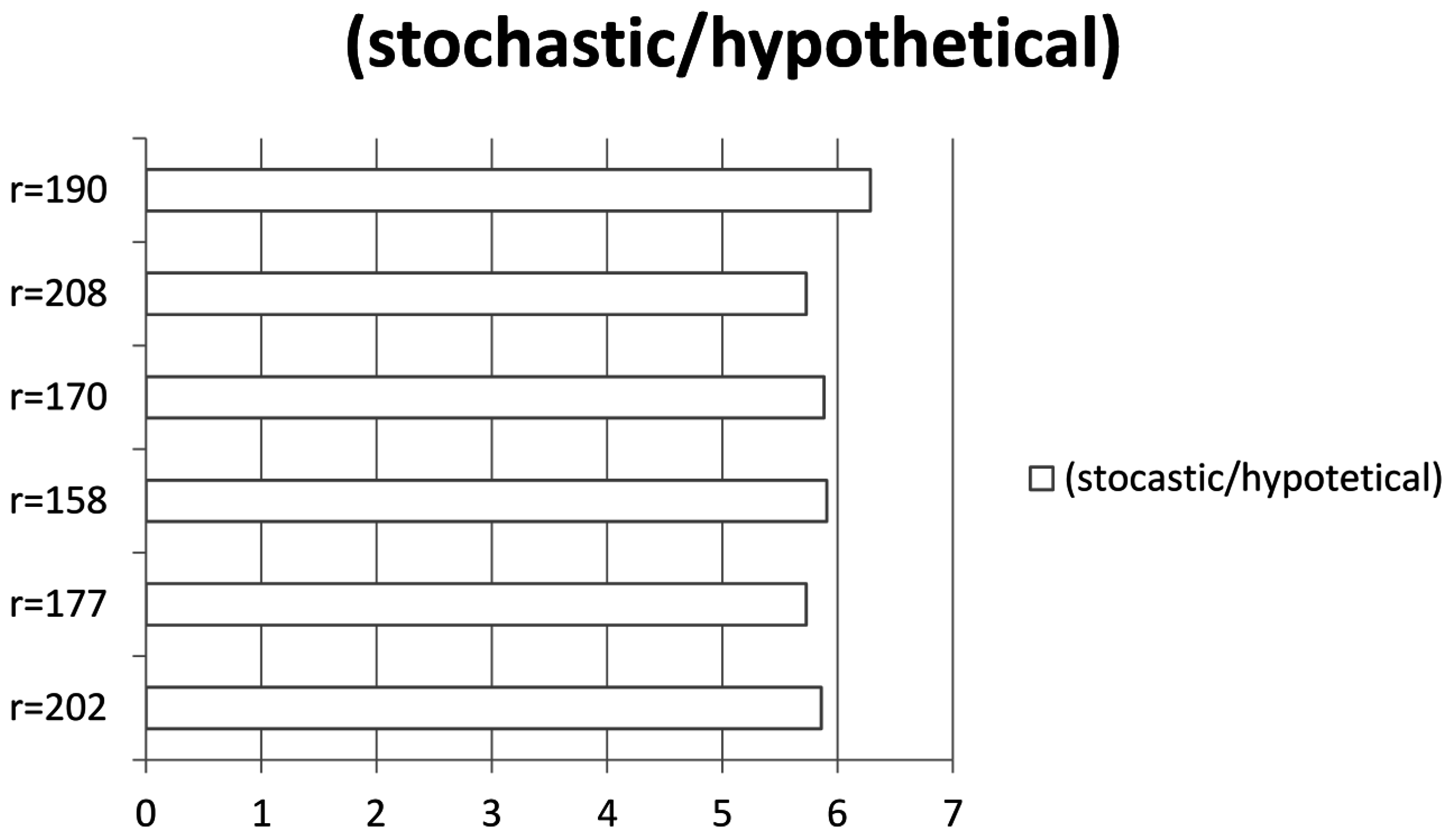
Since no chaotic state was perceived in this study, a stochastic set was created for purposes of comparison, indicating the maximum value of entropy in the system. For this set the entropy was calculated in a hypothetical case using the data set resulting in complexity and calculating its entropy assuming all values to be unique, occurring only once. As expected, the degree of entropy for these stochastic comparison groups was high, all of them above 5.70 (
Figure 8).
These results indicate that the periodic state is far more ordered than the complex state, but that the observed complexity was not totally stochastic.
The limitation of this static method of measuring entropy is that it only measures the number of cycles in total and not their temporal frequencies or the potential altering of the periodic and unpredictable phases. For example, in Simulation 190 (
Supplementary material, Figure S9), a cycle of 11 forms a period, occurring three times successively between time steps 30 and 32, four times between 63 and 66, and four times again between time steps 51 and 57 implying the relatively high order in these phases. Therefore, this feature needed to be evaluated visually, or by exploring complementary indicators beyond the scope of this study. However, although Equation (2) is static, since it measures the occurrence of the time steps (
tn+1 −
tn) between changes, it results in a fairly good representation of the overall entropy of the dynamics. The static states were not included since no measurable period occurred.
5.3. Discussion
This paper contemplated a local scale relaxed urban CA model. The research proved that such a two-dimensional, irregular CA with integrated volume and activity types is capable of simulating the main classical dynamic states typically studied using 1-D CA: Various static, periodic and complex states. Furthermore, the validation indicates that, following the core literature, entropy levels of complex states were indeed between the two extremes (for stochastic and static), thus pointing out the most preferable dynamics for urban evolution.
In this study the transition of these systems from one dynamic state to another did not occur abruptly. On the contrary, the process seemed rather continuous and gradual: as the stress in the matrix was shifted from relations between housing, retail, and services (U1–U3 × U1–U3) towards office/industrial uses (U4–U5 × U4–U5) (
Appendix A Figure A1), the dynamic states also seemed to shift gradually first from static/oscillating states to periodic states with a stochastic phase at the beginning towards more complex dynamics. Only one set of matrix values produced extremely complex behavior (
Table 9) referring to high sensitivity to initial conditions.
The results suggest that in order to support the continuous states in this modeling case, housing needed to be restricted, while office and light industrial uses needed to be encouraged. The impact of housing on dynamics is not surprising given the volume of the surrounding housing area. However, the complex dynamics for housing is undoubtedly caused by non-linear processes and hence could hardly be discovered in a planning process without a microsimulation. Interestingly, rather high values were also required for offices U4 × U4 and industry U5 × U5 for dynamic continuity. No such effect was observed for activities retail and services. It is plausible that the few static sites in the area formed certain kernels (consisting of retail, services, offices and light industry), and supported the emergence of these actors, but it does not explain the high values required for offices and industry. It is possible that such a surprising impact could be explored further using, for example, complex networks, and emphasizing the number of linkages between actors and the general topology of the nets. Since the objective was to use the existing configurations as the initial state for the CA, such complex interconnectedness of these mechanisms was beyond the scope of this study. The results also highlight the fact that complex interactions between scale levels are not linear and may be extremely unpredictable. In this sense the surprising role of offices and light industry was somewhat noticeable, even though in this case their impact on dynamics in reality is not that self-evident.
In addition, the model corresponds with the reality also in that the static states can be considered analogical with a traditional, hierarchical planning process, in which the plan consolidates a certain static position. Implemented in complex cities in a state of flux, this implies a relevant yet burdensome task of constant, incremental updating of plans. Apparently certain level of flexibility is needed.
However, this modeling experiment indicates that total freedom would not be preferable. Even though the total control of the system will most probably lead to stagnation, a certain degree of guidance is necessary for the process to achieve the most desirable outcome, such as high diversity promoting the evolution of the city. In this sense, the results support the intuition: the maneuvers promoting the diversity of activities in the model produced the most dynamic outcomes.
A couple of limitations concerning the relationship between models and reality overall are worthy of note. This model is based on real data and used in a real planning case, and the results appeared intuitively fairly logical. For example, the housing development could indeed become dominant over other uses. However, the model can at its best predict the future only for a short time span since in complex systems, the future is predictable only in a stable state. Hence, applying the complexity framework underlines the intrinsic nature of the world as, first, an evolutionary system with qualitative transitions impossible to predict, and secondly, its chaotic characteristics, especially in the proximity of these transitions. The system might change drastically due to small initial changes, or not react to larger ones and adapt. One relevant option to respond to this dilemma is, as in this paper, to exhaustively study the dynamics emerging from the simulations instead of for example spatial outcomes. Even then, the simulation results might differ from reality, and hence in planning it is necessary to evaluate the implementations constantly in trial-and-error manner.
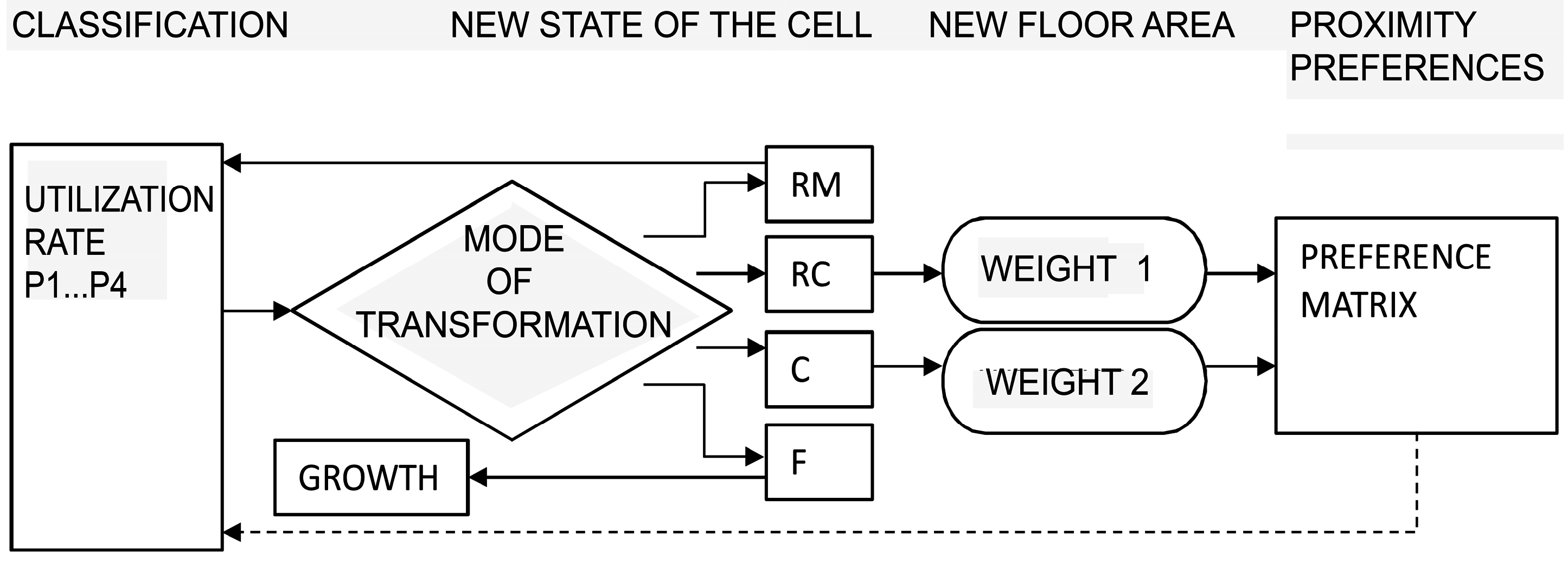
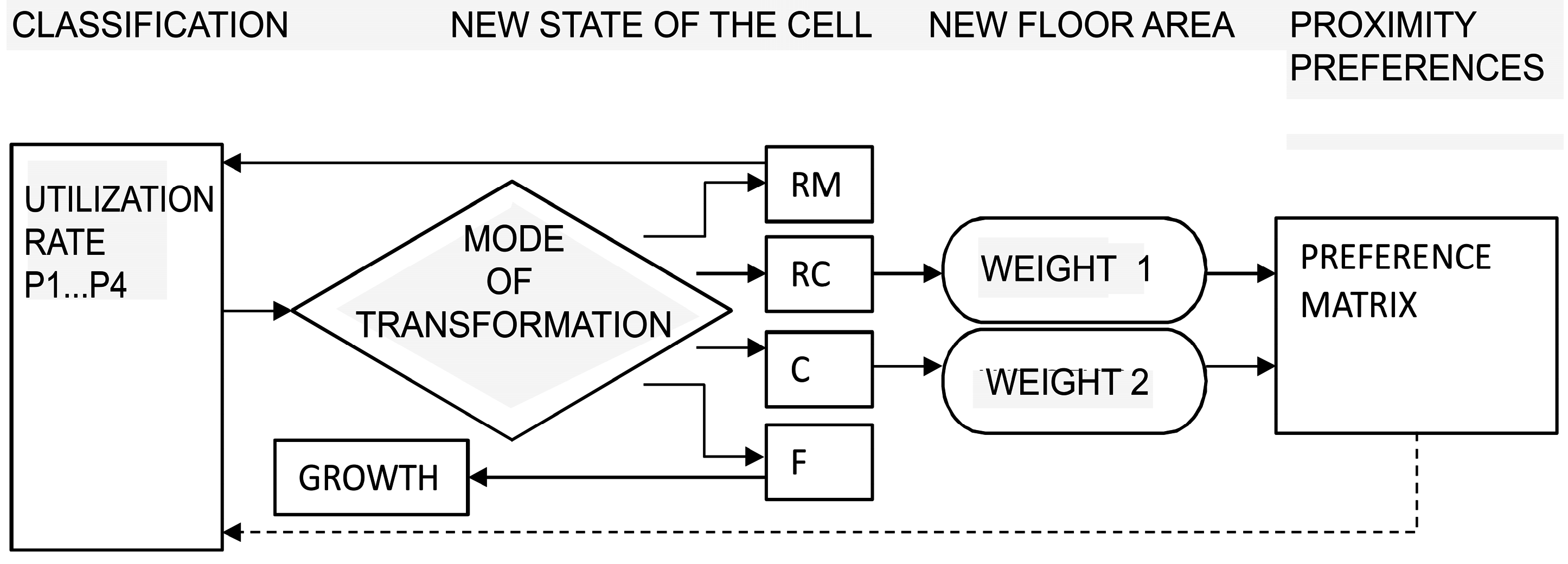
Furthermore, another limitation follows from the configuration of the model. While modeling we stand on the fine line between simplicity and complicatedness. The more detailed the configuration selected for the sake of accuracy, the more difficult it may become to interpret which rules are responsible for a certain model behavior. Hence, several configurational limitations also emerge for the model presented in this paper. For simplicity, the model is based on certain assumptions of agglomeration and regression tendency of activities. In reality, other mechanisms also impact urban dynamics, such as land/property rent, accessibility, synergy between non-similar activities or other externalities. In addition, despite the relaxations, the feedback from the higher level and the outside world was rather limited. In addition, interaction between activities and their environment was contemplated only conceptually to maintain the model simple (
Figure 2). For a solution providing greater accuracy and more relevant feedback, possible future studies could therefore include research on other mechanisms of self-organization, studies on the complex linkages and interdependencies between various interacting actors and networks operating on various scales, and comparative studies in other areas.
However, despite the limitations, the model introduced in this paper could be utilized as a good policy-relevant model, which, in Helen Couclelis’ [
47] words does not provide instructions for decision-makers on what to do, but instead, on what
not to do. In city planning, this would mean, first, acknowledging the uncertainty intrinsic in complexity thinking, but secondly, understanding that urban processes, such as the dynamics that drives location decisions of activities, occur bottom up and their guidance requires setting guidelines rather than of imposing controls.
In such an environment, more flexible planning could provide a frame for urban processes, but the potential impact of the frame must be scrutinized—in this endeavor micro simulations are useful, along with other “complexity planning tools” such as measurement based on fractality, scaling or computation [
32,
55,
56]. In practice, with micro simulation models it is possible to model the environmental factors affecting actors, and then by altering the virtual “planning rules”, for example permitted proximities or other factors, to learn how the guidelines affect the dynamics. Actual decisions could then be based on these findings in a flexible manner, thus supporting self-organization, resilience, city evolution, and continuity of autonomous socio-cultural processes in the city.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}