Abstract
This paper deals with the potential of Third Generation Partnership (3GPP) Project mobile cellular standards to enable vehicular communications. Starting from 3GPP Release 15, and Release 16 specifications for Vehicle-to-Everything (V2X) communications, the different communication modes, interfaces and use cases for V2X based on Long Term Evolution (LTE) and New Radio (NR) are analyzed. This research also studies the potential beneficial impact on V2X of a network that is aware of the underlying Multi-RAT Dual Connectivity (MR-DC) architecture. The methodology followed in this work consists of a review of 3GPP standards for vehicular communications based on mobile networks. The performance evaluation of the communication modes was performed through simulations taking into account resource allocation schemes, packet transmission frequencies, packet size, vehicle density and other parameters defined in the standard. In order to perform simulations of the decentralized communication mode (mode 4), a simulator based on OMNeT++ was configured. For the centralized mode (mode 3), an analytical model in MATLAB was used to configure different simulation scenarios. The results obtained indicate that LTE networks can only support basic V2X use cases because they do not demand strict potential requirements. Simulations showed that the centralized mode offers better performance than mode 4; however, it requires cellular network coverage. More advanced use cases are key for a future Intelligent Transport System (ITS), high-performance networks (i.e., Fifth Generation (5G), NR) are expected to coexist gradually with LTE in the V2X landscape. Therefore, in order to meet the strict requirements for latency, transmission speed and reliability, MR-DC architectures combining different radio access technologies, communication modes and connection interfaces should be deployed. In addition, operation in multi-operator and cross-border scenarios must be guaranteed.
1. Introduction
An Intelligent Transport System (ITS) is a sophisticated concept grouping a plethora of advanced services to make a more intelligent usage of current and future transport networks, thus improving on current procedures regarding persons and goods mobility, traffic management, and the flow of information towards users of transport networks. A key part of an ITS are Vehicle-to-Everything (V2X) communication technologies, which represent a set of standards that give way to services and applications aimed at supporting the goal of an ITS of improving road safety, reducing vehicle fuel consumption, reducing travel time, etc., also in a sustainable way. An intelligent transportation system not only contemplates intelligent transportation solutions, but also “green” transportation solutions. So, it has been shown that through communications between vehicles or between vehicles and network infrastructures it is possible to automate certain maneuvers that vehicles must perform on the roads, which leads to efficient driving that reduces fuel consumption and greenhouse gas emissions [1]. In addition, in the case of electric vehicles, proper management of vehicular traffic on the roads leads to savings in energy consumption, which extends the life of the batteries and, therefore, reduces pollution due to their manufacturing process [2].
The idea of establishing new vehicular communications systems to improve transportation and road safety is not new. In 1998, the US Congress studied spectrum requirements for the operation of intelligent transportation systems, including the spectrum for the dedicated short-range vehicle-to-wayside wireless standard, known as Dedicated Short Range Communication (DSRC) [3]. Thus, the first standards were based on the Institute of Electrical and Electronics Engineers (IEEE) 802.11 standard, also known as Wi-Fi.
Complementarily, services based on vehicular communications are also supported by Third Generation Partnership Project (3GPP) radio access technologies, i.e., Long Term Evolution (LTE) and Fifth Generation (5G) New Radio (NR) [4,5]. Such technologies are known as Cellular-based V2X (C-V2X) and, unlike IEEE technologies, they enable new use cases and applications that were not contemplated in previous releases. The V2X communications umbrella term includes Vehicle-to-Vehicle (V2V) (communications between vehicles), Vehicle-to-Pedestrian (V2P), Vehicle-to-Infrastructure (V2I) and Vehicle-to-Network (V2N) [6]. Through V2V, two or more vehicles can exchange packets for different V2X services, even without cellular network coverage. The V2I communication mode allows a vehicle to communicate with road safety transmission nodes installed along the roads. In addition, V2I communications can extend the communication range between two or more vehicles. Through V2P, vehicles can establish communications with V2X devices carried by a pedestrian. This makes it possible to send alert messages and warnings to avoid an accident. Using V2N vehicles can establish communications via the cellular network. This allows, for example, a human operator to remotely control a vehicle whose communications pass through the cellular network. A large number of use cases, applications and services have been defined for V2X [4,5]. Each use case demands certain potential requirements that the network must guarantee in order for that use case to be implemented efficiently. These potential requirements are related to: high transmission rates, low latencies, high reliability, large coverage ranges, etc. To meet these potential requirements, it is necessary to take advantage of certain communication modes and internetworking mechanisms to improve the robustness and reliability of communications.
That there will be a progressive adoption of 5G from Fourth Generation (4G) and coexistence of both technologies is already considered in the specifications. There are architectures that allow combining the use of several access technologies in a heterogeneous environment. These technologies, known as Multi-RAT Dual Connectivity (MR-DC) [7], allow, for example, a user equipment to connect to an LTE and NR access node simultaneously. The question also raises of determining in which situations it is convenient to switch from one technology to the other in order to make communications more efficient, i.e., to determine how and when to use a certain communication mode and interface depending on the usage scenario and the potential requirements of the applications being used. The necessary architectures are further complex when interconnection mechanisms must be defined where multiple operators are presented and a User Equipment (UE) must be managed so that the use of V2X is authorized independently of the operator to which it is subscribed.
This paper provides a review of basic and advanced use cases defined for vehicular communications and their corresponding potential requirements. Thus, it describes the need for high performance networks, communication modes and efficient internetworking mechanisms to meet the potential requirements of different services. The simulations carried out of LTE transmission modes allow obtaining Packet Delivery Ratio (PDR) data based on the distance between transmitter and receiver, which indicates the limitations of this technology and suggests the need for new technologies with better Key Performance Indicators (KPIs).
The present paper is organized as follows. Section 2 reviews the standards for vehicular communications, communication modes and use cases defined by 3GPP. Section 3 details the resource management mechanisms defined for LTE mode 4. Section 4 shows simulation results of the PDR in LTE Mode 4 and LTE Mode 3 to support that a centralized approach offers better performance, at the cost of cellular network coverage, also asserting that LTE V2X can only address rudimentary use cases. Finally, Section 5 discusses how being aware of the MR-DC nature of 5G non-standalone deployments may be beneficial for the sustainable growth of capacity provisioning planned by a Mobile Network Operator (MNO) and the ongoing adoption of advanced V2X services.
2. 3GPP Vehicular Communication Standards
2.1. LTE and NR V2X Modes
The 3GPP, in order to develop new services and applications that can be offered through the LTE platform, has defined new standards for vehicular communications. Thus, the first specifications for C-V2X arise from Release 14 (Rel-14), which was completed in the fourth quarter of 2016 [6]. The V2V communications included in the standard are based on D2D communications that were defined as part of Proximity Service (ProSe) services in Release 12 (Rel-12) and Release 13 (Rel-13). In this sense, the specific Device-to-Device (D2D) interface, known as PC5, is reused for V2V, V2I and V2P communications. At the present, as part of 3GPP standards defined for vehicular communications, there are two technologies based on LTE and NR networks: LTE C-V2X and NR C-V2X. In the 3GPP technical specifications, four types of vehicular communications have been defined: V2V, V2P, V2I and V2N [4]. These four types of vehicular communications are intended to provide intelligent transportation services in order to improve road safety, better traffic management, pollution reduction, etc. It can be noted that, unlike technologies based on IEEE 802.11p standard, C-V2X technologies include V2P and V2N connection possibilities, so new use cases can be defined. In addition, such types of communications enable the inclusion of new internetworking mechanisms through the MR-DC approach, cross border/cross MNO communications and the use of hybrid communication interfaces to add redundancy to communications.
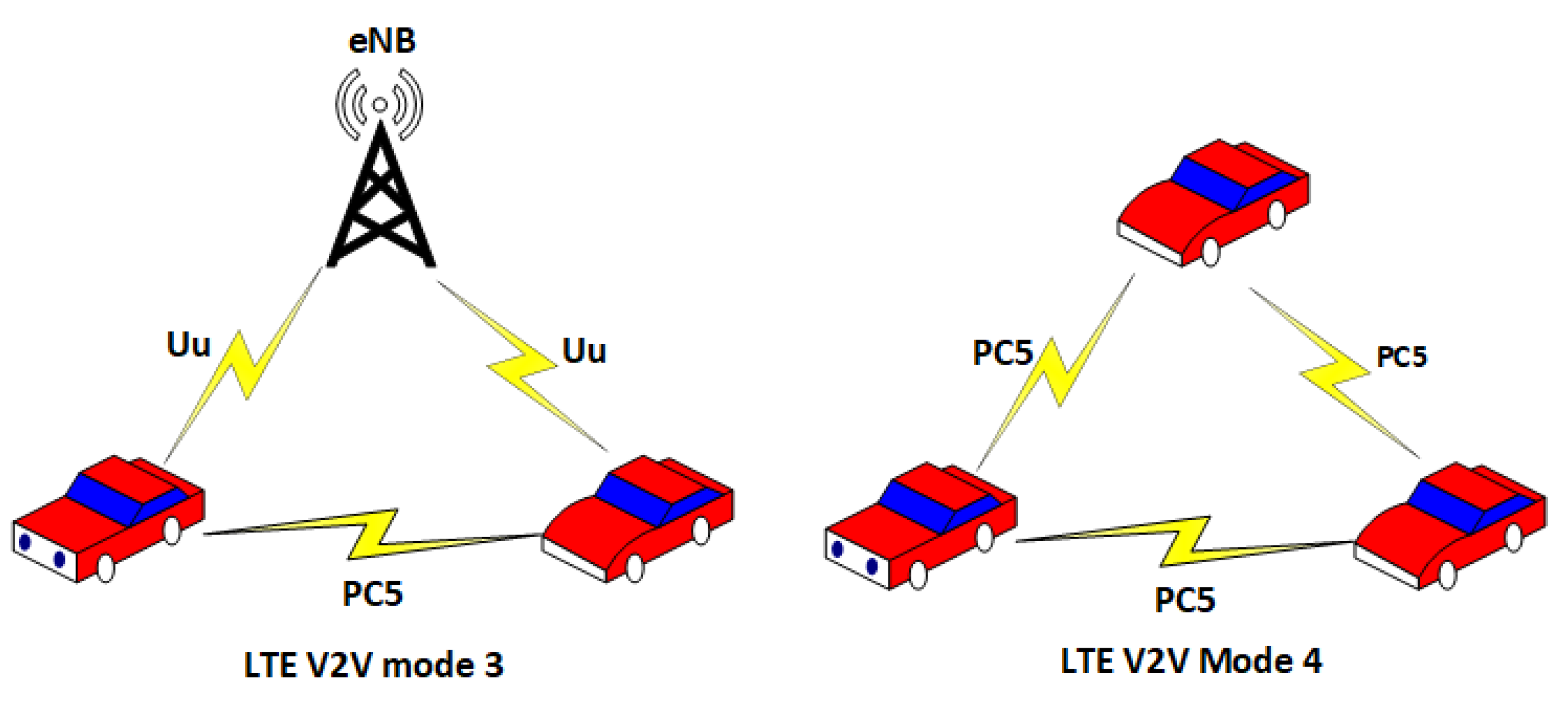
Regarding modes of operation, for LTE C-V2X, two modes of operation are introduced for V2X communications, called mode 3 and mode 4 [8]. Basically, modes 3 and 4 are an extension of D2D modes 1 and 2, standardized in Release 12. In mode 3 (managed mode), like mode 1 for D2D communications, the UE requests resources for the V2X service from the evolved Node B (eNB). Thus, the LTE-Uu interface is used to communicate the UEs with the eNBs, and the PC5 interface for V2V, as shown in Figure 1. On the other hand, mode 4 (unmanaged mode), like mode 2 for D2D communications, consists of an autonomous mode in which no communication from the UEs to the network is required, i.e., communication is independent and is performed through the PC5 interface, also known as Sidelink (SL). Section 4 of this paper shows the performance evaluation results of LTE modes 3 and 4 obtained through simulations in an end-to-end simulator and an analytical model. Thus, different simulation scenarios are configured according to the parameters and specifications of the standard.
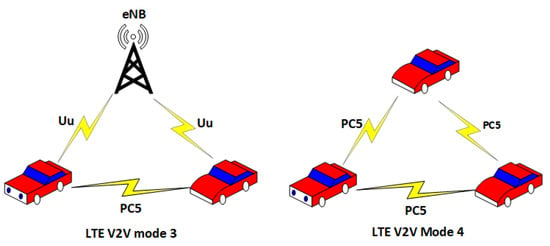
Figure 1.
LTE V2X modes.
The 3GPP Rel-14 specifications for C-V2X are the basis for the development of the new NR-based technology. Thus, interoperability with previous technologies is ensured and, on the other hand, service performance for V2X communications is improved thanks to new techniques developed in the new generations of mobile networks. This first phase, known as V2X Phase 1, was completed in March 2017. Phase 2 V2X is introduced through 3GPP Release 15 (Rel-15), where some enhancements are incorporated to 4G LTE networks oriented to the development of 5G NR. The improvements added, related to the V2X service, consist of providing improvements such as carrier aggregation, latency reduction, high transmission rates, etc. Additionally, improvements are added in direct communications over PC5, transmission diversity and use of higher order modulations, e.g., Quadrature Amplitude Modulation (QAM) with 64 symbols.
As already reviewed, for LTE C-V2X, two communication modes are defined, called mode 3 and mode 4. Similarly, for NR C-V2X two transmission modes are defined: SL mode 1 and SL mode 2. Such communication modes are known as SL, since it allows establishing a communication link between two devices, without having to carry traffic, in this case, through a Next Generation Node B (gNB).
In SL mode 1, similar to LTE C-V2X mode 3, the gNB is responsible for allocating resources to UEs. On the other hand, in SL mode 2, similar to LTE C-V2X mode 4, UEs can establish a communication link outside the coverage area of a gNB. Additionally, 4 sub-modes are defined [9,10]: mode 2(a), mode 2(b), mode 2(c) and mode 2(d). In mode 2(a), UEs automatically select the resources to be used. In mode 2(b), on the other hand, a UE can assist other UEs in the selection of resources for transmission. In mode 2(c) it is differentiated whether the operation is performed outside the network coverage area (out-of-coverage operation) or in coverage area (in-coverage operation). For the out-of-coverage operation mode, mode 2(c) provides a pre-configuration of one or multiple transmission patterns, mapped to each resource pool. For the within coverage area mode of operation, it is assumed that the gNB indicates the location of one or multiple transmission patterns. Finally, in mode 2(d), a UE participates in resource selection for other users.
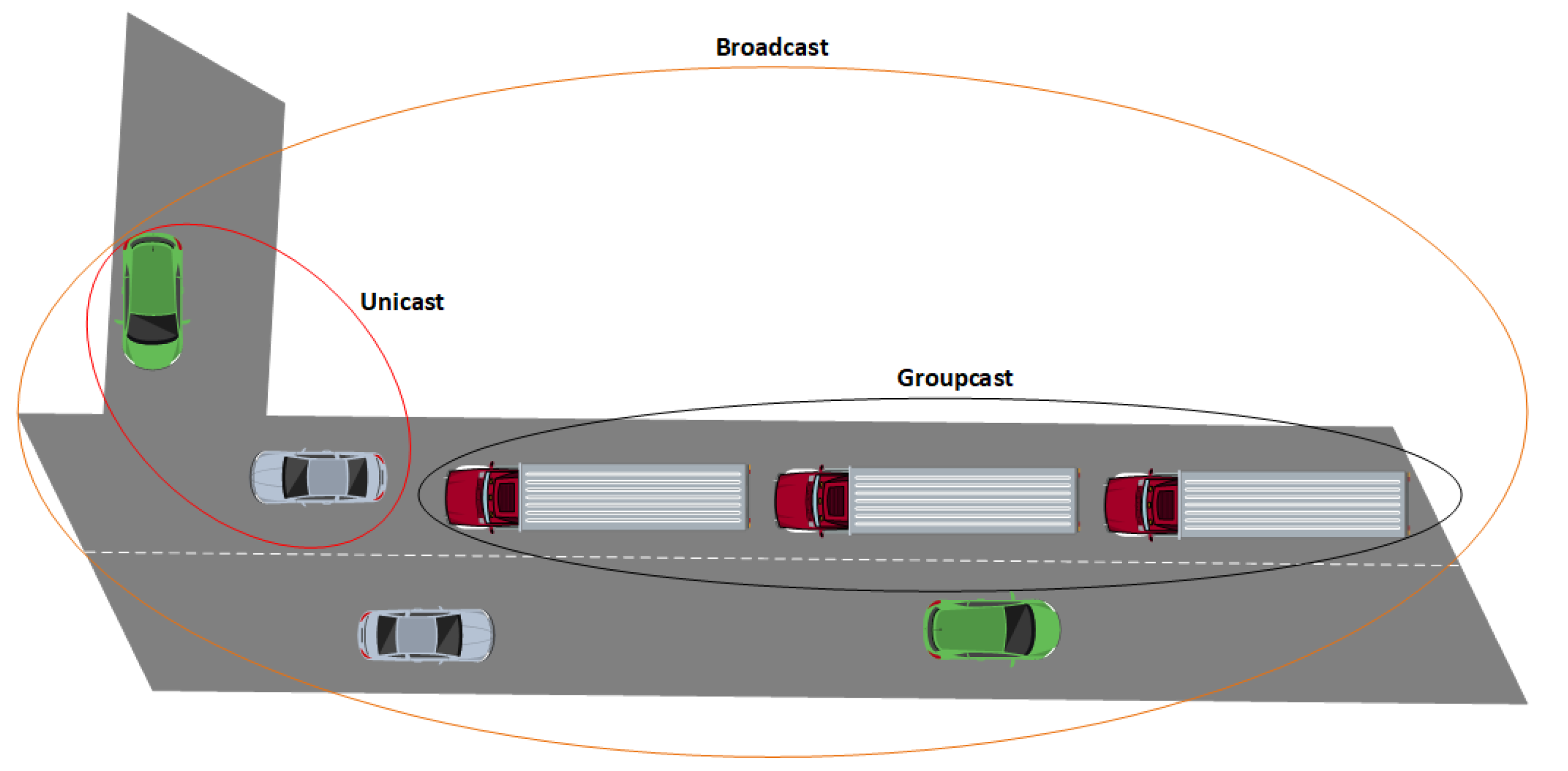
Additionally, for NR C-V2X, 3 modes of message transmission between UEs have been defined: unicast, groupcast and broadcast. As illustrated in Figure 2, in unicast mode a UE communicates only with another UE. By groupcast a UE can transmit messages to one or more UEs in its vicinity, e.g., in a platoon of vehicles, the lead vehicle transmits messages to the platoon members. In broadcast mode, a UE transmits messages to all surrounding vehicles that are within the transmission coverage area. In NR C-V2X a UE can support the 3 modes of information transmission previously indicated. As shown in Figure 2, a lead vehicle can support groupcast transmission to the members of a platoon, and at the same time it can perform a unicast transmission to another surrounding vehicle that does not belong to the platoon.
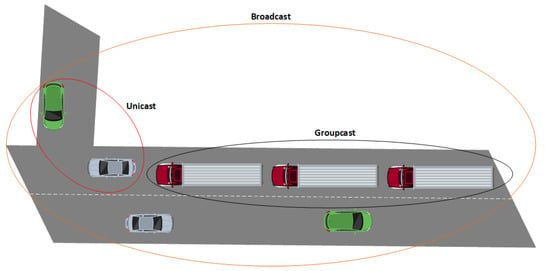
Figure 2.
NR V2X transmission modes.
2.2. LTE and NR Use Cases
In general, services for intelligent transport systems are known as Day 1, Day 2 and Day 3 services [11]. Day 1 services are basic services that refer to Awareness Driving. Thus, through the V2X service, it is possible to exchange warning information about position, speed, driving direction, etc. Day 2 services are referred to Sensing Driving, that is, through the use of sensors the vehicles obtain and share information from the environment to other vehicles. In this way, other vehicles can be warned of a potential danger related to vulnerable road users, driving at intersections, etc. Day 3 services refer to situations involving Cooperative Driving. Therefore, it refers to advanced services that involve the exchange of information related to maneuvering intent and trajectories. This form of communication allows road users to interact intelligently even in complex traffic situations. Day 3 services require high network performance in terms of latency and network reliability.
TR 22.885 Rel-14 [4] defines a set of use cases, ranging from road safety services to complex services with stringent latency and network reliability requirements. For each of the use cases, specific latency parameters, packet sizes used to send V2X messages, and different UE data rates that the network must support are given. In this sense, not all services have the same potential requirements, for example, some services require low latencies to function properly, other services require high network reliability, i.e., low packet losses. Some services require the network to provide strict latency, reliability and bandwidth parameters. Thus, there is a direct relationship between the potential requirements for different services and the KPIs provided by the network. Table 1 shows some use cases defined for LTE V2X, where it can be noted that the requirements of latency, message packet size and speed support depend on the specific use case. Latency is a primary parameter for V2X services, since a delay in the transmission or reception of messages can affect the correct performance of the services offered and, in the worst case, can lead to counterproductive results. With respect to the size of the packets to be transmitted, it depends on the type of message being sent, whether it be by means of the V2V, V2I, V2P or V2N service. Additionally, it is essential that the network guarantees an adequate connection to vehicles circulating at high speeds.

Table 1.
Potential requirements for LTE V2X [4]. The units for packet transmission are packets per second (pps).
Other use cases defined for LTE V2X include: road safety services, speed warning messages in curves, collision warnings to pedestrians or cyclists.
The 3GPP in [5] has identified 25 new use cases for advanced V2X services. These use cases can be grouped into 4 areas:
- Vehicle platooning: refers to dynamically formed vehicle platoons. Thus, a lead vehicle transmits information to the vehicles that are part of the platoon. In addition, the surrounding vehicles can receive information from the platoon via Road Site Units (RSUs).
- Advanced driving: Both vehicles and RSUs can share data acquired by sensors to vehicles in their vicinity. Consequently, the vehicles can dynamically coordinate their trajectory.
- Extended sensors: exchange of sensor data or video information between vehicles, pedestrians, RSUs, servers, etc.
- Remote driving: use cases that allow remote operation of a vehicle either from a human operator or a V2X server.
Table 2 shows the main requirements defined for the NR V2X use cases. Such requirements depend on the specific use case, for example, for Remote Driving the maximum latency that the network must offer must be less than 5 ms. Other services for Extended Sensors may require higher bandwidth to transmit video information. In all cases, the reliability of the network must be higher than 90%.
Table 2.
Potential requirements for NR V2X [5].
For Vehicle Platooning and Advanced Driving, the exchange of up to 50 V2X messages per second is required. This requirement is particularly important since, as shown below through simulation results, an increase in packet transmission frequency results in a higher rate of packets lost due to congestion and interference. This obviously decreases the reliability of the network for a given coverage distance.
Some use cases shown in Table 1 and Table 2 can be associated with green transport solutions. For example, use cases defined for LTE V2X such as Automated Parking System and V2N Traffic Flow Optimization reduce the time a vehicle is circulating on a road and, therefore, decrease greenhouse gas emissions, reduce energy consumption in the case of battery-powered vehicles, reduce tire wear and contribute to the reduction of traffic jams. In addition, the exchange of vehicle information with road traffic management platforms can be useful to avoid traffic jams and recommend alternative routes that reduce travel time. For this, it is necessary that this information is constantly updated and from this information it is possible to generate traffic prediction algorithms to anticipate events. With respect to use cases defined for 5G V2X, Advanced Driving services enable vehicles, user devices and infrastructures to manage communications for the smooth movement of vehicles on the roads. For example, at an intersection, two vehicles can manage a traffic priority, thus avoiding the need for one or the other vehicle to stop and restart. For Vehicle Platooning (autonomous or semi-autonomous), it has been demonstrated that through proper coordination in the separation and speed of the vehicles, fuel consumption and gas emissions can be reduced. For this purpose, it is necessary that the vehicles belonging to the platoon manage communications among themselves and with other surrounding vehicles. Such communications must be carried out in unicast, groupcast or broadcast modes, as shown in Figure 2.
3. Resource Management in LTE V2X Mode 4
The way to allocate resources for V2X communications in LTE is based on the use of different communication modes, i.e., mode 3 or mode 4. Mode 3 requires cellular network coverage and the use of the Uu interface is mandatory. On the other hand, through mode 4, UEs can manage resources in time and frequency to establish communications. In that sense, one Resource Block (RB) is the basic unit of resources that can be allocated in frequency, i.e., 180 kHz. In addition, the basic unit of time is the duration of a subframe in LTE, i.e., 1 ms. These RBs can be mapped by using channel bandwidths of 10 and 20 MHz. Furthermore, the possible subchannel sizes are defined in [8,12]: 4, 5, 6, 8, 9, 10, 12, 15, 15, 16, 18, 20, 25, 30, 48, or 50 RBs and the possible number of subchannels to 1, 3, 5, 10, 15, or 20.
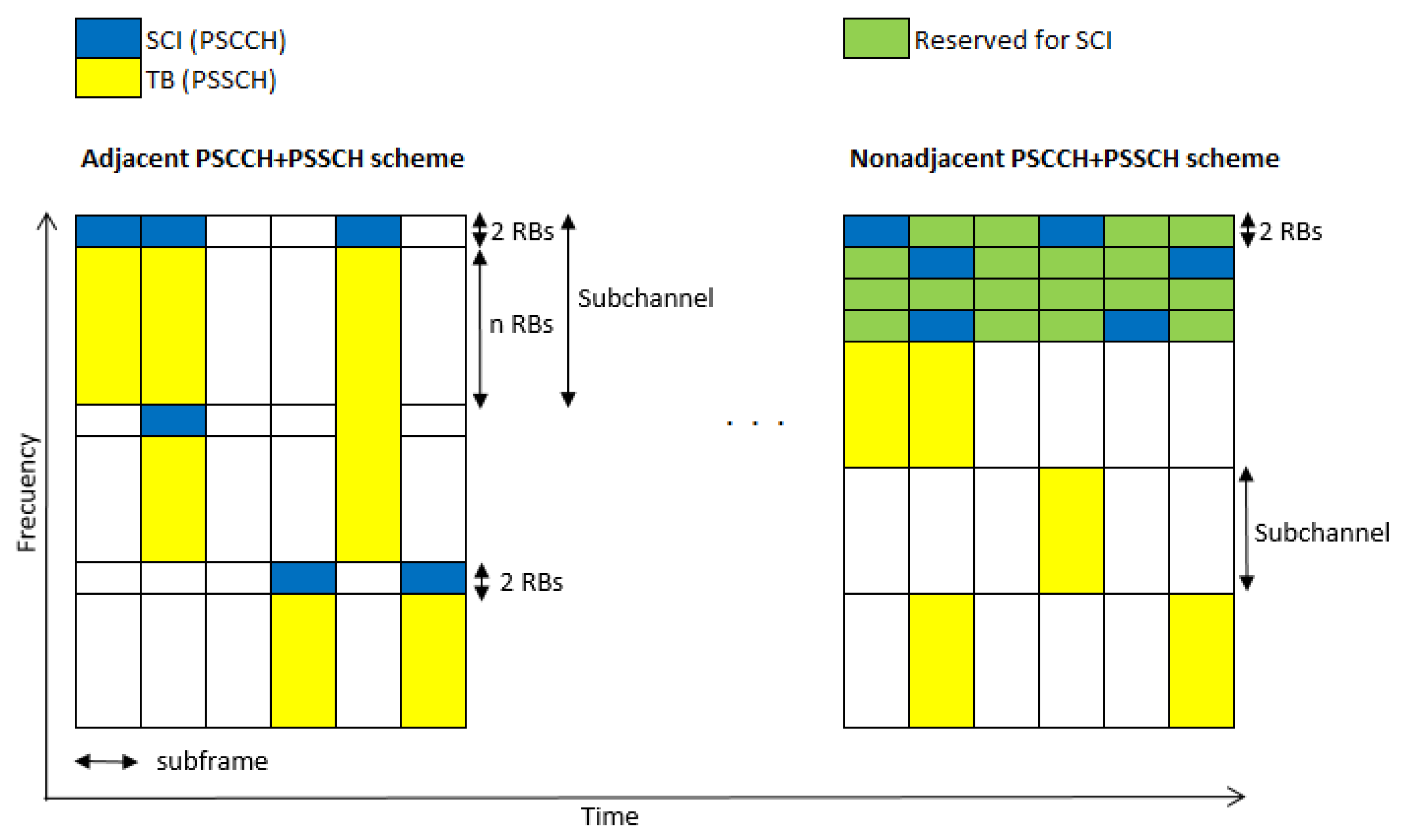
Additionally, the concept of subchannels is used, which represent a set of n RBs in the same subframe. Such subframes can be used for the transmission of both data and control information in V2X communications. Specifically, data is transmitted via Transport Blocks (TBs) and control information via SL Control Information (SCI) messages. TBs are mapped via Physical Sidelink Shared Channels (PSSCHs) and SCIs via Physical Sidelink Control Channels (PSCCHs) [8]. The information carried by an SCI is related to the type of Modulation and Coding Scheme (MCS) used in the TBs, Frequency Resource location of initial and retransmission, resource reservation, retransmission index, etc. Therefore, the transmission of a TB with its corresponding SCI in the same subframe is mandatory [13]. LTE V2X defines two subchannelization schemes: adjacent PSCCH + PSSCH and nonadjacent PSCCH + PSSCH, as shown in Figure 3. In the first one, an SCI, which occupies two RBs in frequency, is transmitted in adjacent RBs with corresponding TBs. The number of RBs occupied by the TBs depends on the type of message to be transmitted, e.g., Cooperative Awareness Message (CAM) messages. In the second subchannelization scheme, different resource pools are used to transmit SCIs and TBs. In both schemes, it is understood that for each TB mapped in a subframe, its corresponding SCI is also transmitted. In addition, it is possible to transmit several sets of TB + SCIs in the same subframe.
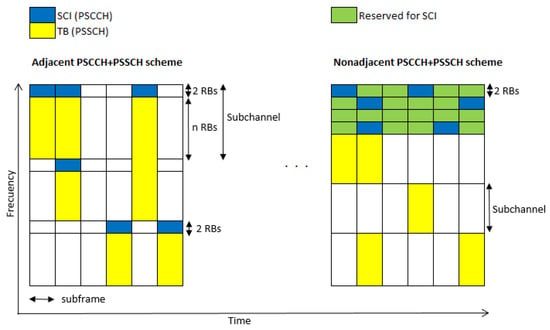
Figure 3.
Adjacent and noadjacent PSCCH + PSSCH channelization.
Other physical layer aspects specified by the standard are [14]: TBs can be transmitted using Quadrature Phase Shift Keying (QPSK) or 16-QAM modulation schemes. On the other hand, SCIs can be transmitted using QPSK. The transmit power is specified at a maximum level of 23 dBm and a receiver sensitivity of −90.4 dBm.
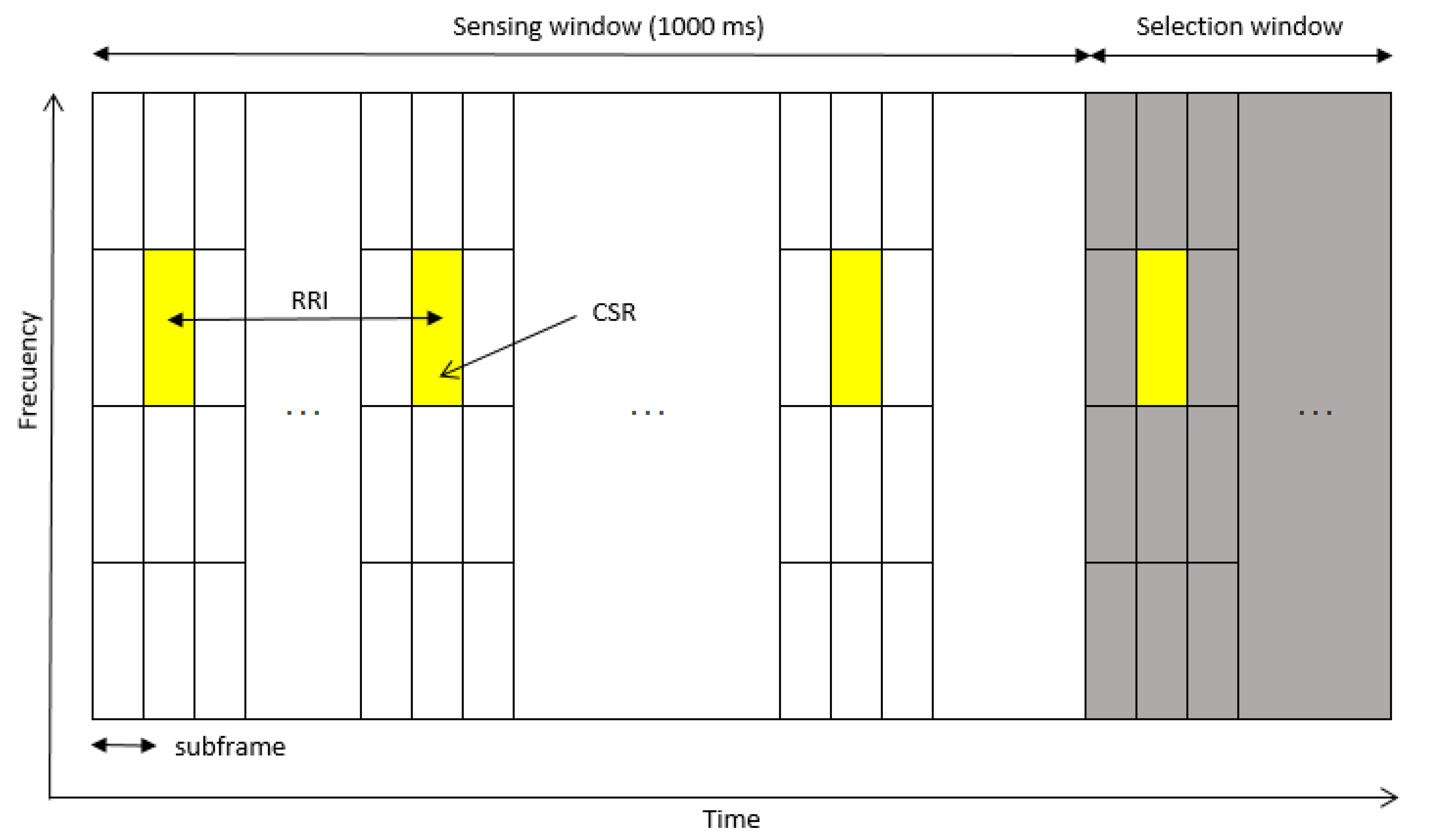
When vehicles use mode 4 to establish V2V communications, Semi-Persistent Scheduling (SPS) is used [8,15]. As described in [14,16,17], using SPS vehicles can reserve channels using a set of standardized procedures. Such procedures ensure that vehicles perform time and frequency sensing and reservation of available resources using a technique that decreases the probability of multiple vehicles selecting the same resources. As shown in Figure 4, the sensing and resource reservation procedures are based on the use of a sensing window and a selection window. Through the sensing window a vehicle selects a set of Candidate Single-Subframe Resourcess (CSRs) that, after a filtering process, will be used in the selection window to transmit V2V packets, i.e., n SCIs + TBs. The following four steps are necessary in the resource selection process using SPS:
- Step 1: CSRs are sensed in the sensing window which has a duration of 1000 ms, i.e., 1000 subframes or 1 s (see Figure 4). In this window, a vehicle selects all available CSRs, except those that, through the CSI, indicate that they have been reserved by other vehicles.
- Step 2: CSRs whose average Reference Signal Received Power (RSRP) is above a certain threshold are filtered out. This threshold is defined from higher layers and depends on the priority of the packets, which may be related to the type of V2V service being used. Note that this step excludes CSRs that are possibly being reserved or used by other surrounding vehicles.
- Step 3: It should be verified that the number of CSRs filtered in the previous step is at least 20% of the initially sensed CRSs. If this is not the case, then the threshold defined to measure the average RSRP is increased by 3 dB. Thus, step 3 is iteratively repeated until the condition of having at least 20% of CSRs available is met.
- Step 4: finally, 20% of the CSRs (filtered in step 3) that experience the lowest average Received Signal Strength Indicator (RSSI) of all RBs are filtered out. Thus, a CSR is randomly selected to be used for the first transmission.
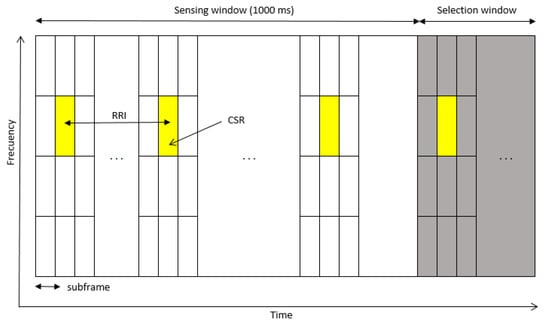
Figure 4.
Semi-Persistent Scheduling for LTE mode 4.
Figure 4.
Semi-Persistent Scheduling for LTE mode 4.
Additionally, the following issues should be taken into account in the resource selection process using SPS in mode 4 V2V:
- The number of subchannels of a CSR that a vehicle must reserve depends on the length of the message to be transmitted. That is, it depends on the V2V use case to be used.
- The duration of the selection window depends on the latency requirements of V2V communications and has a maximum duration of 100 ms, i.e., 10 pps. In addition, sensing windows with a duration of 50 ms and 20 ms are possible for 20 pps and 50 pps, respectively [15].
- The vehicle can continue transmitting persistently after a certain number of packets. This number depends on a Reselection Counter (RC) that decrements depending on the transmission time of consecutive packets and is known as Resource Reselection Interval (RRI). The RC is randomly selected and can vary from [5, 15] for 10 pps, [10, 30] for 50 pps and [25, 75] for 50 pps. Note that there is persistent transmission for at least 1 s.
- Each time the RC decreases to zero, the resource selection and reservation process must be performed again, where the probability of keeping the previous resources varies between 0 and 0.8.
Alternatively, through the V2V mode 4, the standard allows the option of sending duplicate packets, in order to improve the reliability of communications.
4. Performance Evaluation
Most published works focus on the evaluation of LTE mode 4, because it is a decentralized mode that does not require cellular network coverage. Thus, refs. [12,16,17,18] present results obtained from the evaluation of resource allocation and congestion control mechanisms based on 3GPP specifications. On the other hand, ref. [19] presents a simulator for LTE mode 4, which is open access and complies with the specifications of the standard. The latter is used in the evaluation of the decentralized mode in this work. As for the evaluation of the centralized mode, an analytical model based on MATLAB [20] is used. Both simulation tools allow us to calculate the PDR as a function of distance for different densities of vehicles on the roads, packet sizes and and packet transmission rates per second.
4.1. LTE Mode 4
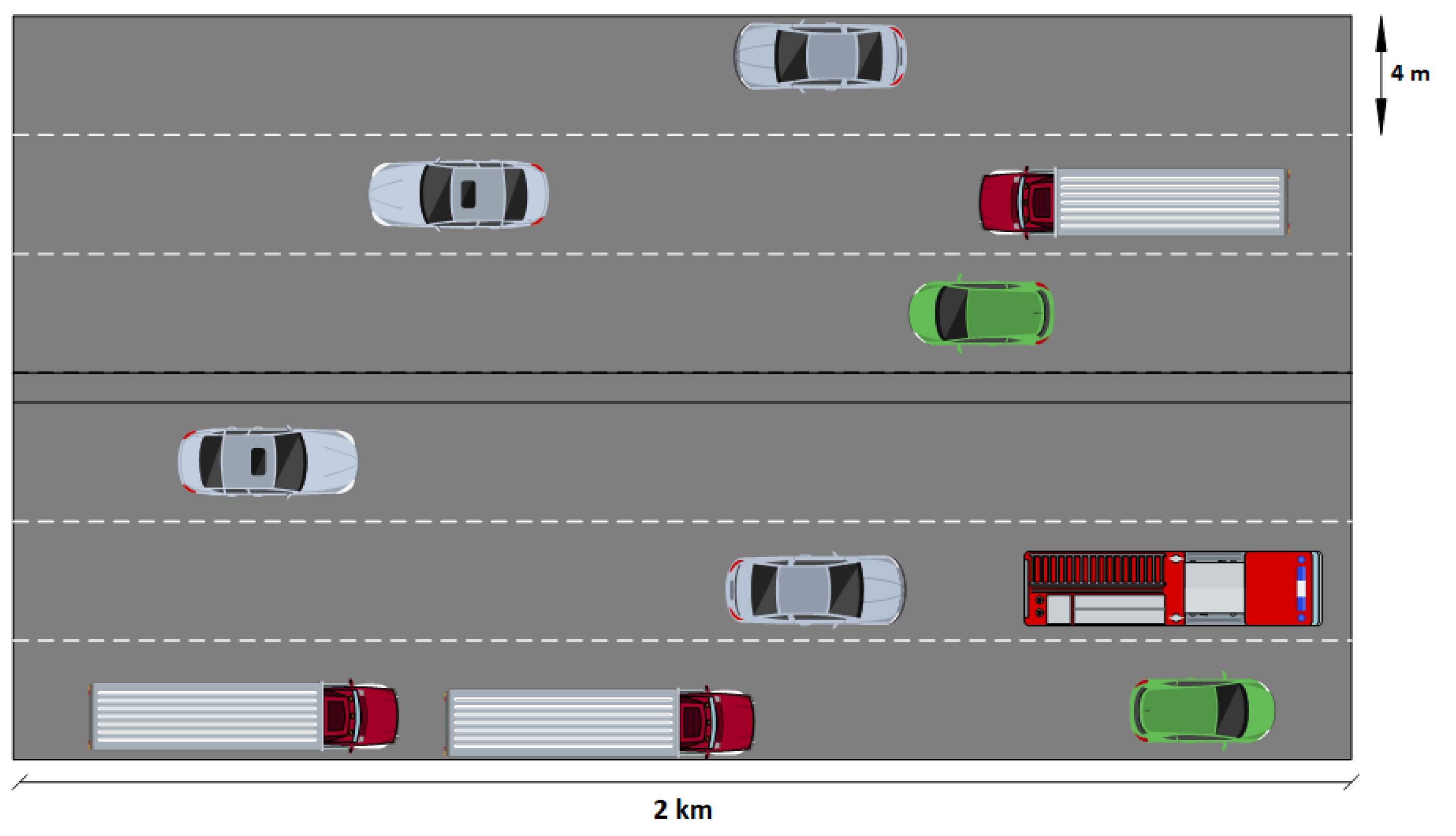
Our interest was to perform simulations based on the use of LTE-V2V mode 4. This is because, through this unassisted mode, vehicles must manage the resources to be used in situations where there is no cellular network coverage. For this purpose, a scenario is considered in a highway whose conditions are based on the recommended in [21]. Thus, it is considered a two-way highway with three lanes in each direction (see Figure 5). The length of the highway is 2 km, and each lane has a width of 4 m. In this sense, different vehicle densities (in vehicles per meter) can be configured to consider highway fast (0.06 vehicles per meter (vpm)) and slow scenarios (0.12 vpm).
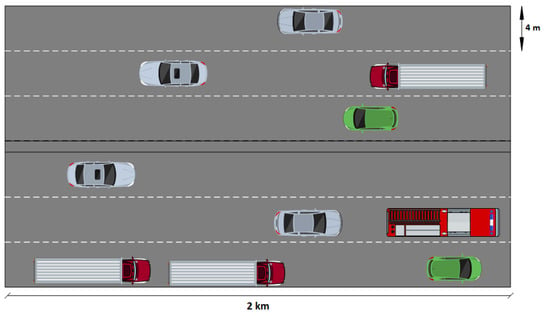
Figure 5.
Highway conditions considered for the simulations.
Additional parameters to be considered are shown in the Table 3.
Table 3.
Reference parameters for simulations.
4.1.1. OMNeT++ Simulation Tool
The open source tool openCV2X [19], based on the discrete event simulator OMNeT++ [22], is used to carry out LTE-V2V mode 4 simulations. In turn, openCV2X is based on the simuLTE [23] tool defined for enabling complex system level performance-evaluation of LTE and LTE Advanced networks.
Additionally, openCV2X needs other add-ons in order to function properly:
- INET [24]—an open source framework for OMNeT++ that provides libraries for wired and wireless networks.
- VEINS [25]—an open source framework to generate simulations of vehicular networks.
- SUMO [26]—an open source road traffic simulator.
OpenCV2X is developed based on the 3GPP specifications as described in the previous section. First, the vehicles are placed on the road at a given density. A 500 s is considered at the beginning of the simulation in order to reach a stabilization of the scenario before proceeding with the inter-vehicle communications. Then, 12 s simulations are set up taking into account different conditions such as different packet transmission rates, density of vehicles on the road and transmission powers.
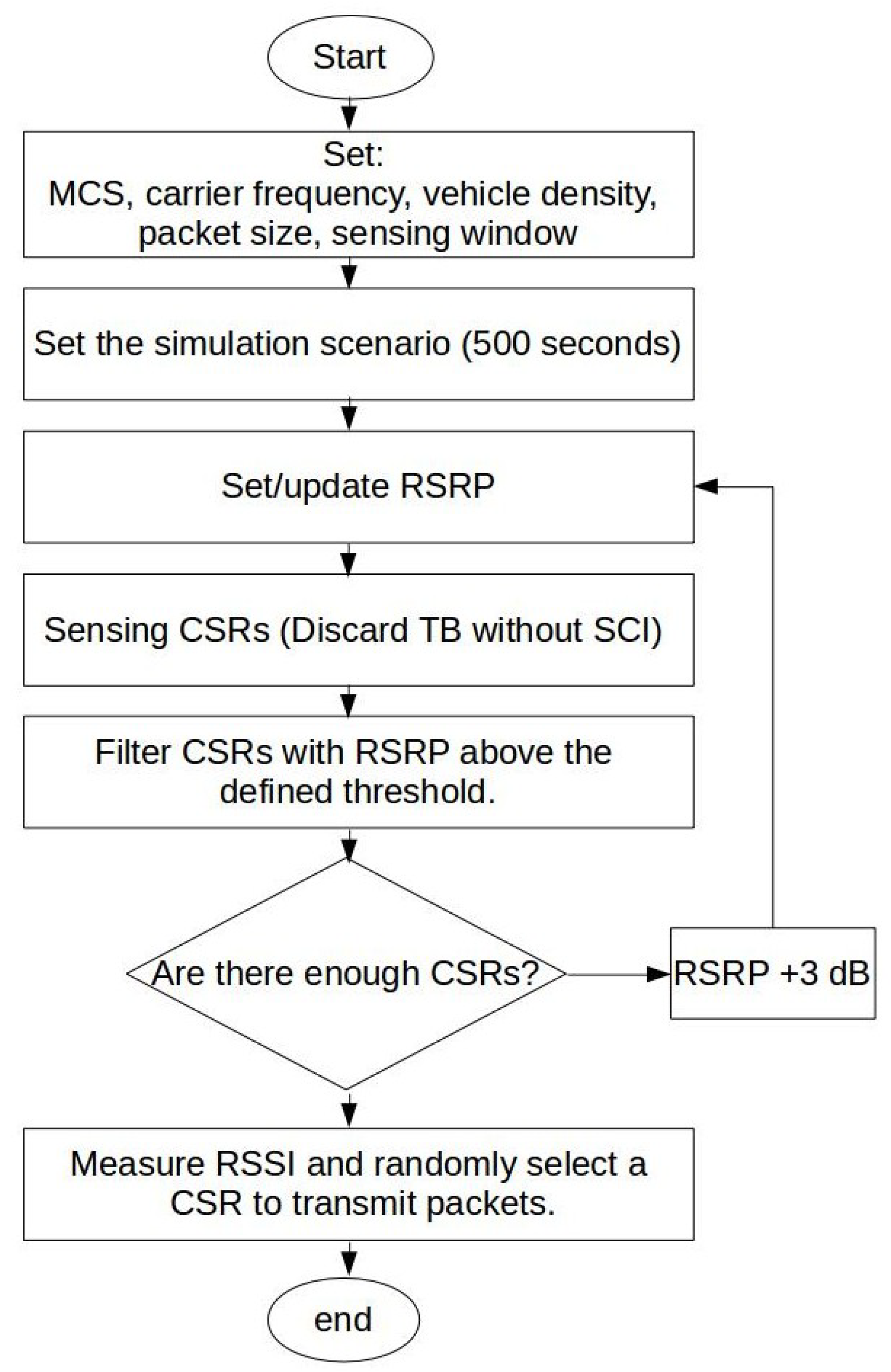
Figure 6 shows a flow chart with the main steps that are followed to obtain the results. In order to prevent all vehicles from transmitting the first message at the same time, a delay varying from 0 to 1000 ms is configured in the first packet. Then, all vehicles transmit and receive alert messages based on the resource selection and congestion control processes defined for mode 4. CAM packets of 190 bytes are sent in multicast mode with different transmission frequencies. To determine the number of RBs to be used to transmit each packet, both the MCS and the packet size are considered. Thus, the TB defines the number of RBs needed to transmit each packet. To this number of packets must be added the 2 RBs needed to transport the SCI (i.e., adjacent PSCCH/PSSCH). To obtain the PSSCH-RSRP, Power Spectral Density (PSD) of the RBs is multiplied by the bandwidth of each Resource Element (RE). Thus, the PSSCH-RSRP is calculated as the average power for each RE assuming that the power is equally distributed over all the REs. On the other hand, for the RSSI calculation, power noise and interference are considered for each RB. Thus, RSSI is equal to the sum of the received power per RB multiplied by the total number of transmitted RBs.
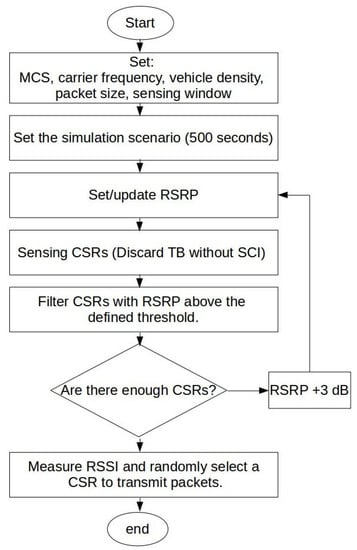
Figure 6.
Main aspects followed by openCV2X for LTE Mode 4.
An important consideration to take into account in the simulations is that if an SCI is not properly received, the TBs associated with that SCI must be discarded, since they cannot be decoded correctly, i.e., the corresponding SL information is missing. In this paper, we have considered only PDR as a metric to analyze the reliability of centralized and decentralized modes under different ranges of coverage in diverse scenarios. However, in a future work, we plan to also analyze metrics such as latency and transmission rates in MR-DC scenarios. In these cases, a variation of communication latency is expected due to the use of different radio access technologies and communication interfaces. On the other hand, transmission rates are expected to improve due to the use of simultaneous communications between different technologies.
After performing several simulations in different scenarios, the data is obtained and then processed using Python.
4.1.2. Performance Results
OMNeT++ provides the results obtained in both vector (.vec) and scalar (.sca) files. Jupyter Notebook, which runs under the Anaconda package management system, is used as a data analysis and representation tool.
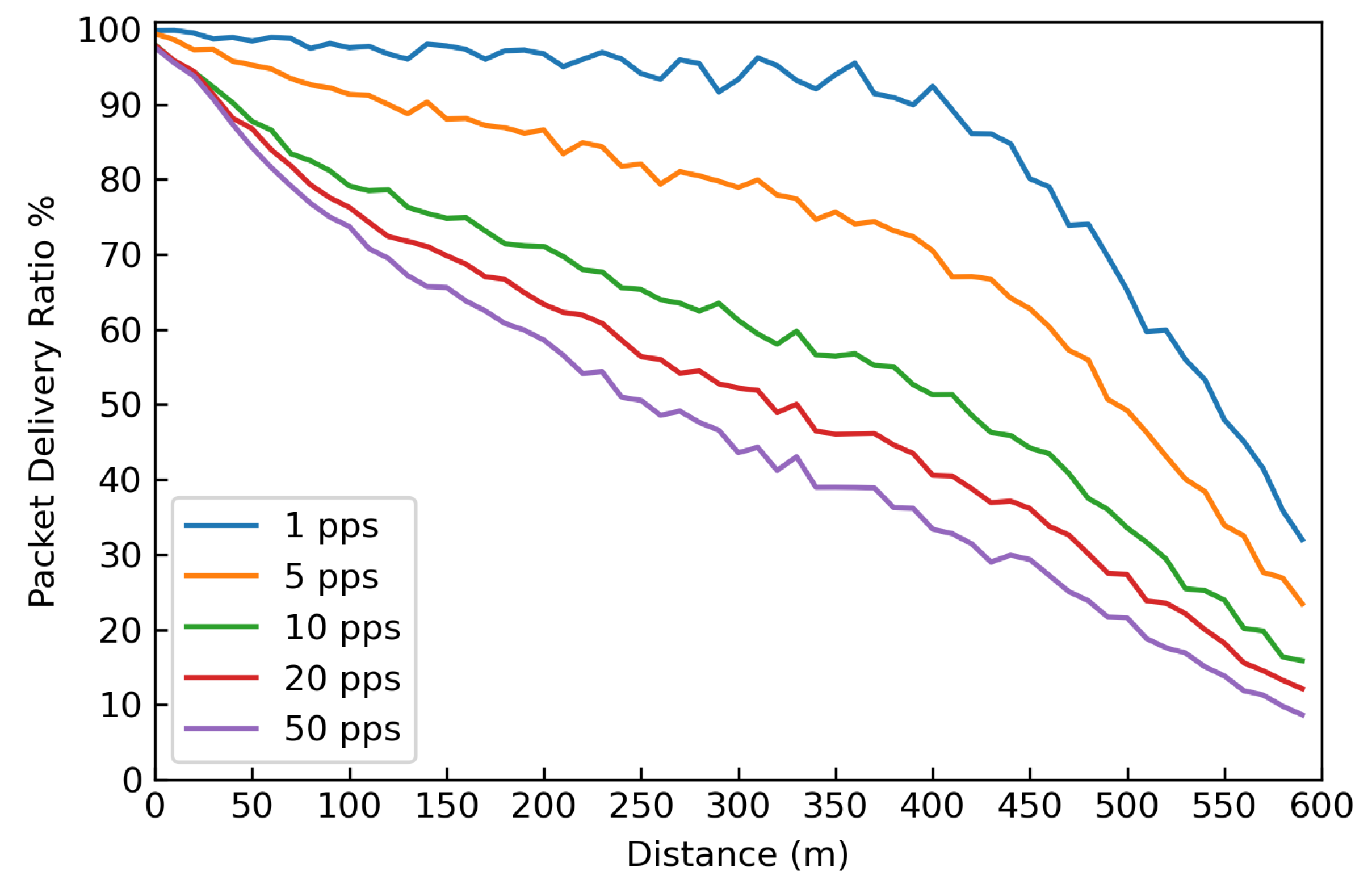
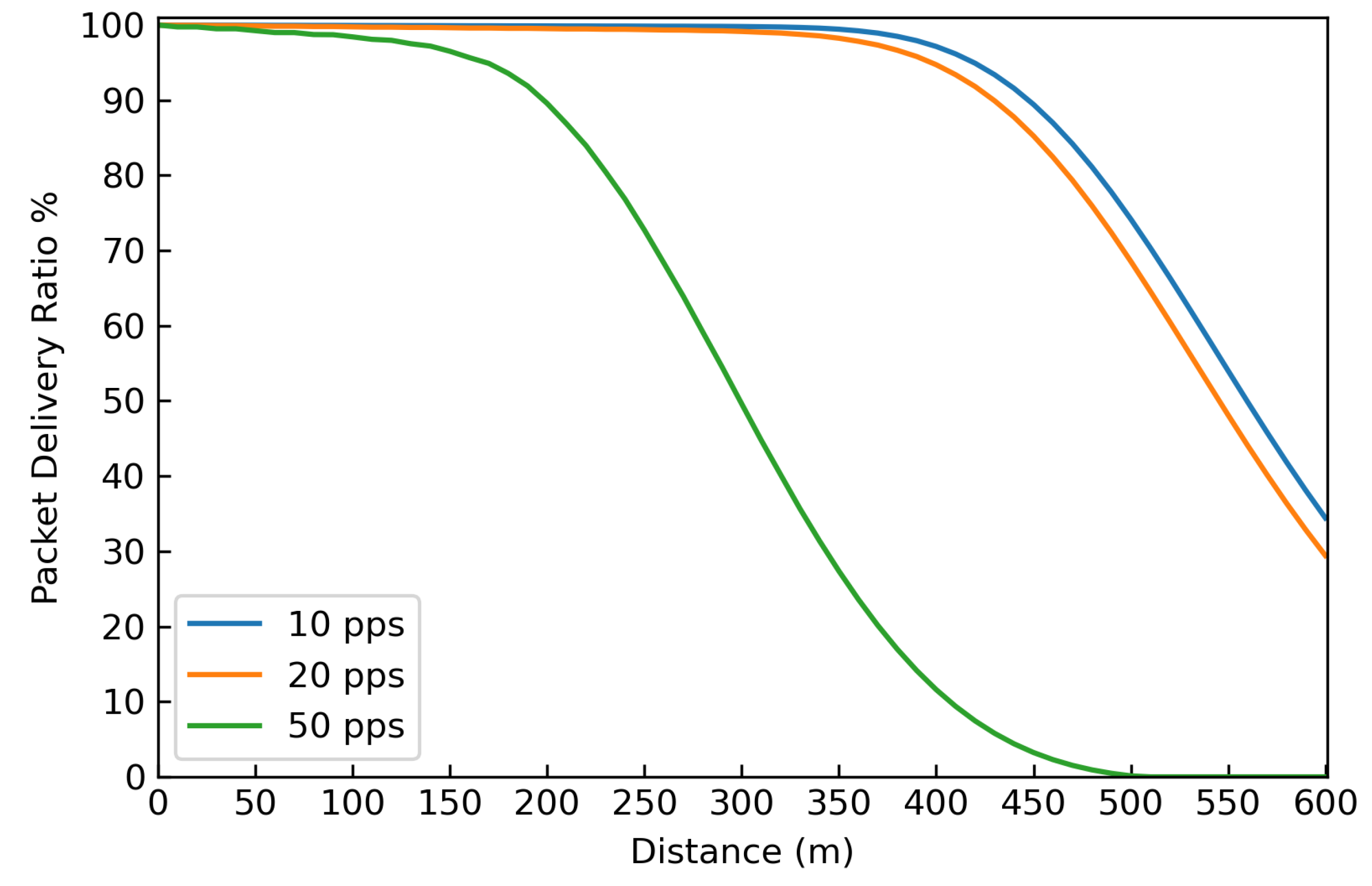
Figure 7 shows PDR curves as a function of distance under certain packet transmission rates. The rest of the parameters configured in this simulation were described in Section 4.1. In this experiment, a road density of 0.06 vpm has been considered. That is, using openCV2X, about 130 vehicles are placed along the two kilometers of the highway. This case corresponds to the fast highway scenario mentioned above. The average speed at which vehicles travel on the road is 140 km/h. Figure 7 shows that the increase in V2V packet transmission rates decreases the distance under which an adequate PDR can be guaranteed. For example, for a packet transmission rate of 5 pps, the maximum distance to guarantee a PDR of 80% must be below 250 m. Increasing the packet transmission rate causes coverage conditions to decrease significantly.
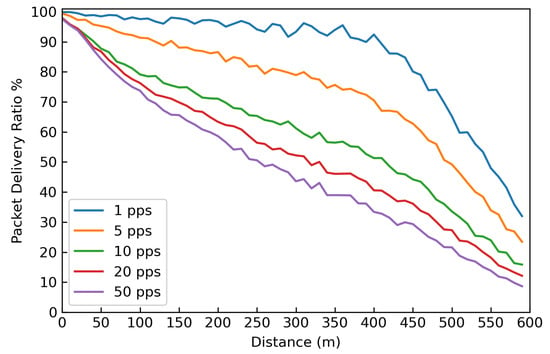
Figure 7.
PDR variation as a function of distance for different V2V packet transmission rates.
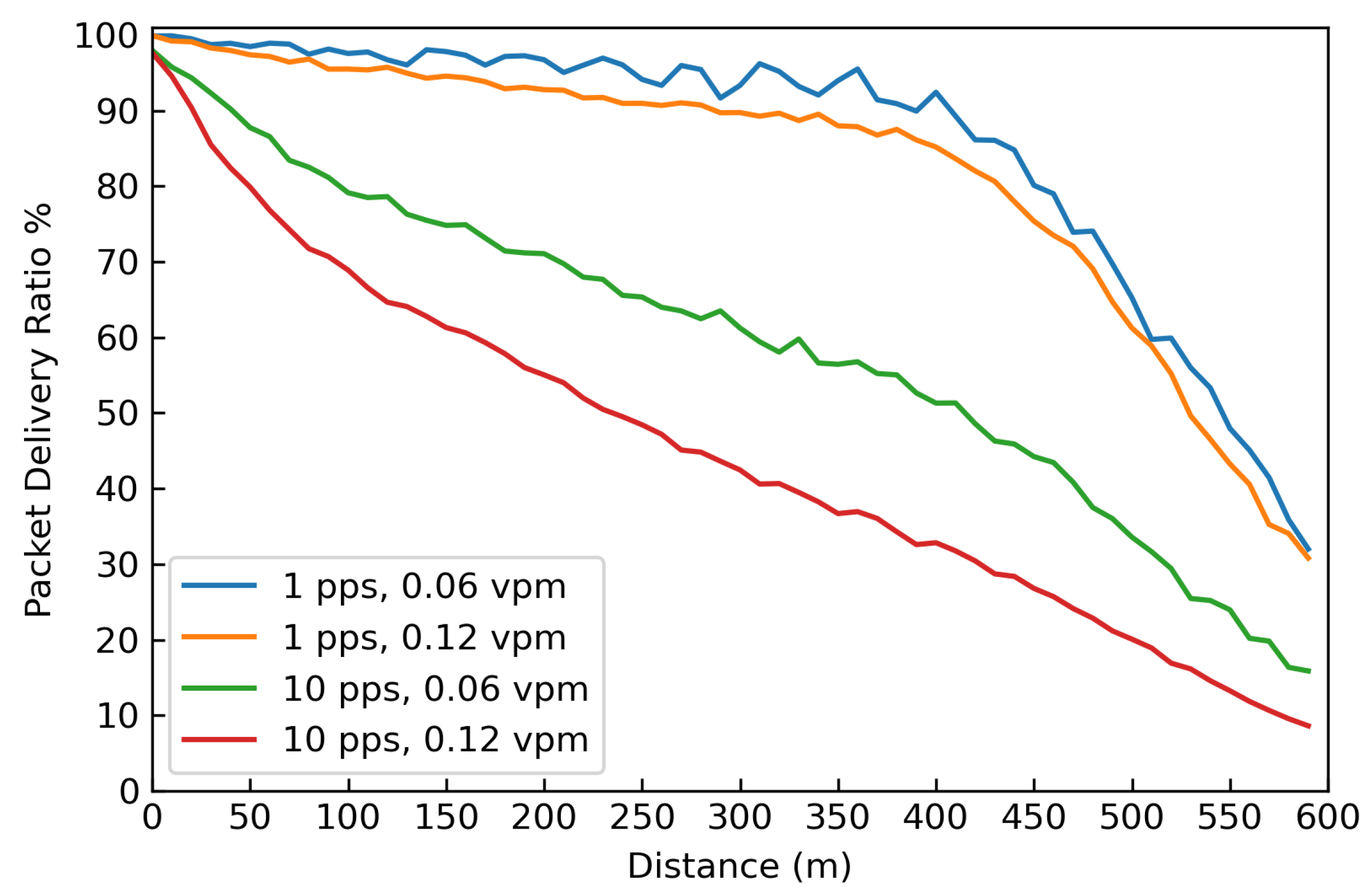
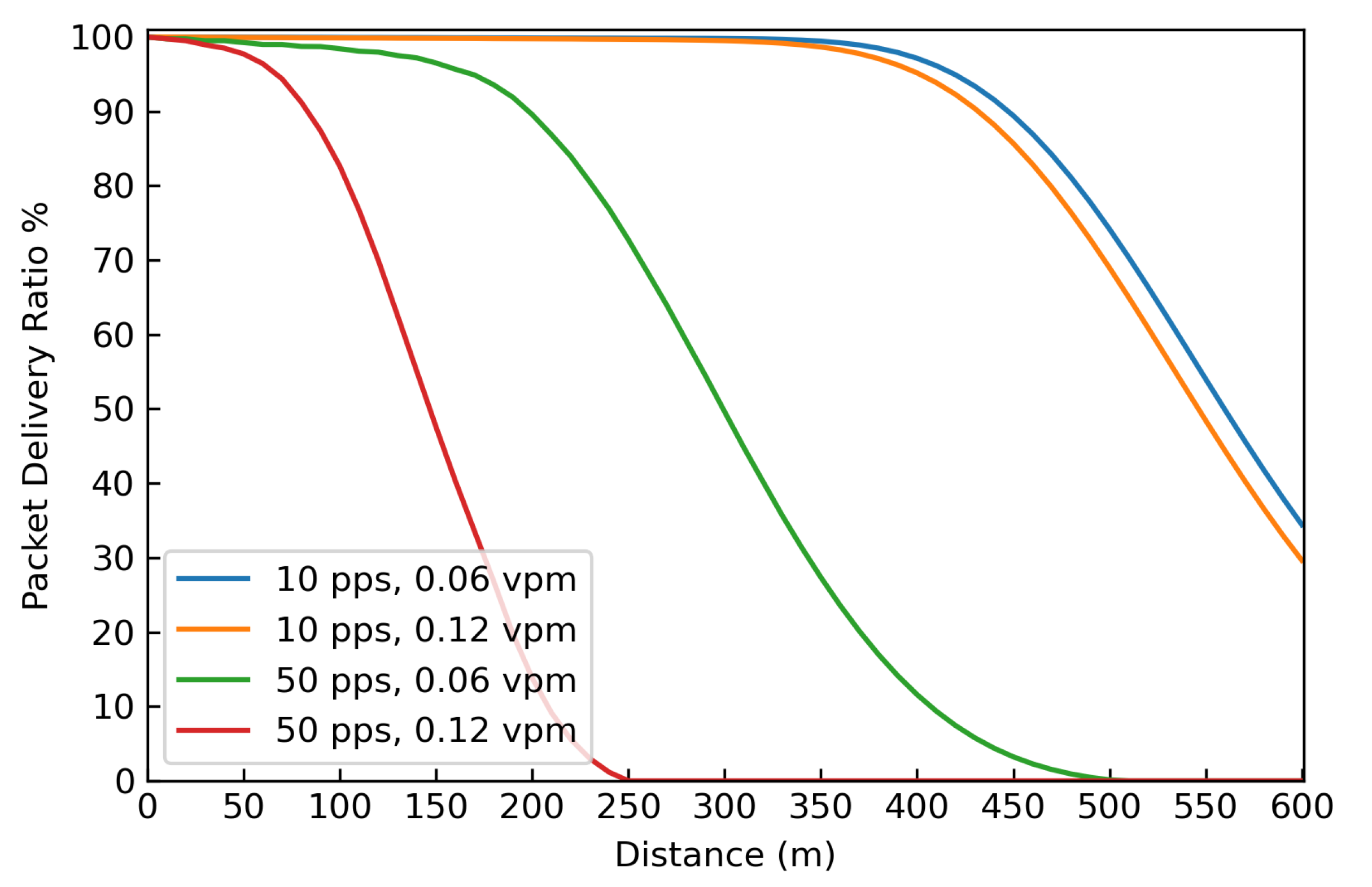
In order to analyze the PDRs under congested freeway conditions, a scenario with a vehicle density on the freeway of 0.12 vpm with an average speed of 70 km/h is set up. Figure 8 shows the variation of PDR as a function of propagation distance under different packet transmission rates and vehicle density on the road. In this case, it is evident that if the number of vehicles on the road increases, the PDR decreases because the channel congestion increases. Thus, there is a higher probability that more than one vehicle reserves the same resources in time and frequency, so that the SCIs associated with each V2V message cannot be properly received.
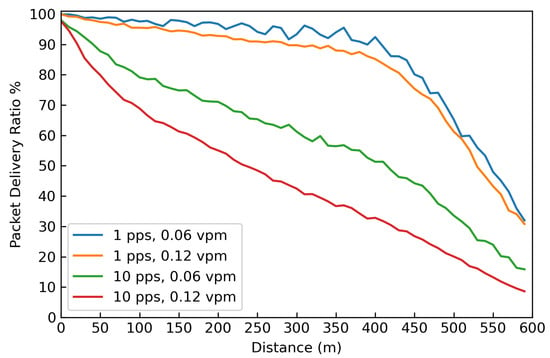
Figure 8.
PDR as a function of propagation distance under different packet transmission rates and vehicle density.
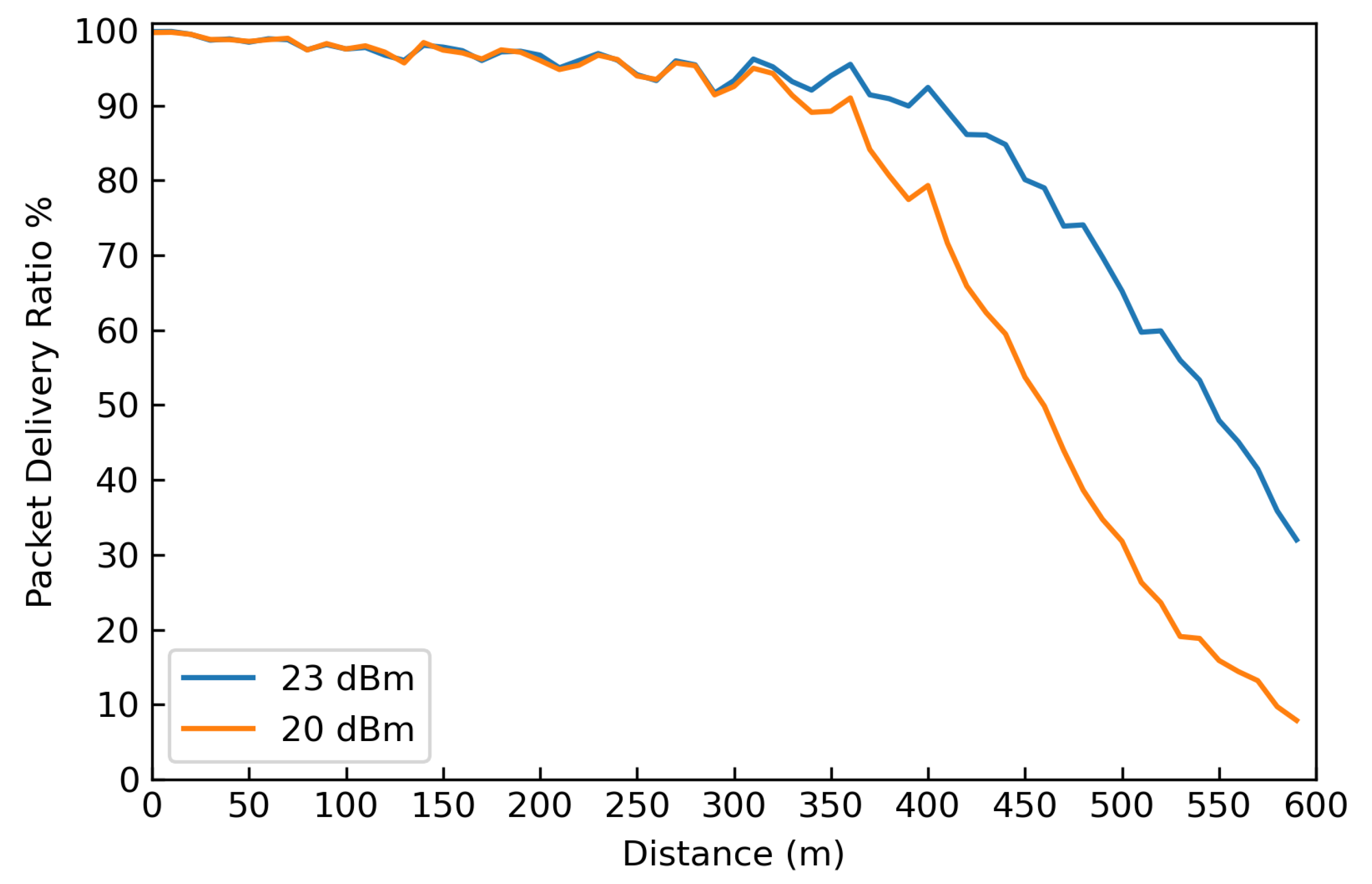
In Figure 9, we analyze the effect of transmit power on the PDR for different propagation distances. In this case, a fast highway scenario with a transmission rate of 1 pps is considered. It is verified that when the transmit power decreases from 23 dbm to 20 dBm, the PDR levels are similar for distances below 300 m. However, longer distances lead to higher packet losses.
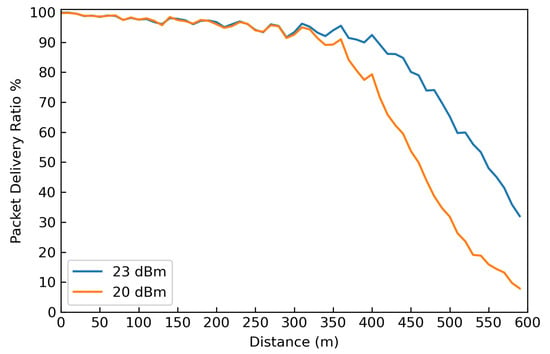
Figure 9.
PDR as a function of propagation distance under different transmission powers.
4.2. LTE Mode 3
Unlike LTE mode 4, the standard does not define a specific resource allocation mechanism in mode 4. Thus, there is the possibility of defining different mechanisms to reduce channel congestion and packet losses, especially in environments with a high density of vehicles on the roads. In order to carry out simulations in mode 3, an analytical model defined in [20] is applied. This model, called DIRAC (aDaptive spatIal Reuse of rAdio resourCes), is developed on MATLAB and allows us to set up scenarios similar to those considered in mode 4. This model takes advantage of the geographic location of the vehicles to establish a dynamic configuration so that all vehicles experience a similar level of interference. In addition, this model reduces the signaling overhead inherent in a centralized mode.
The reference parameters considered in the model are the same as described in Table 3. Thus, Figure 10 shows the variation of the PDR as a function of distance for different packet transmission rates in mode 3. A vehicle density of 0.06 vpm on the road is considered. The results show, as in mode 4, that increasing the packet transmission rate limits the distance range for a given PDR. However, in all cases, the performance of mode 3 is better than mode 4. For packet transmission rates of 10 and 20 pps, the PDR is above 95%. For 50 pps, the same PDR level is maintained, but the coverage range is limited to 200 m.
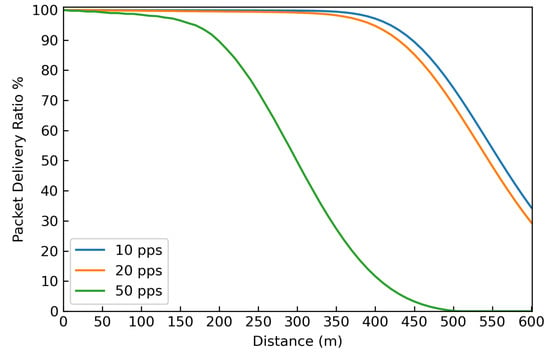
Figure 10.
PDR variation as a function of distance for different V2V packet transmission rates in LTE mode 3.
Figure 11 shows the variations of PDR considering different densities of vehicles on the road. In this case, in slow scenarios the PDR are significantly affected compared to highway fast scenarios due to a higher density of vehicles on the road. However, for 50 pps, a PDR above 80% is guaranteed for distances less than 100 m.
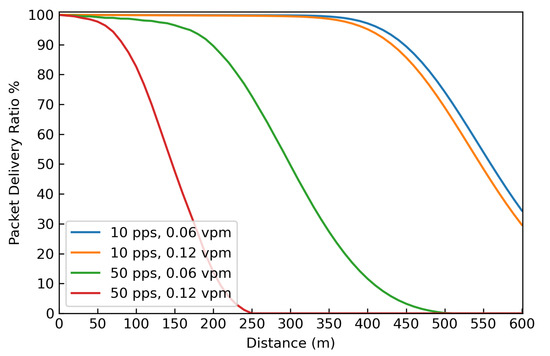
Figure 11.
PDR as a function of propagation distance under different packet transmission rates and vehicle density in LTE mode 3.
Both LTE mode 3 and LTE mode 4 simulations show that a PDR above 90% can only be guaranteed for short distances. Table 2 shows that use cases require a range of coverage to function properly. For example, for extended sensors, the required coverage distance can be up to 1 km. Whether using centralized or non-centralized LTE modes, the required network reliability of 90 to 99.999% cannot be guaranteed. Worse still, conditions degrade when the packet transmission frequency or the density of vehicles on the roads increase, and when transmission power is reduced. Given that advanced use cases involve demanding potential requirements such as bandwidths, latencies, reliability and coverage ranges that cannot be offered by LTE networks, it is necessary to network architectures that allow us to meet such indicators. One solution that has been envisioned to solve the challenges presented in this scenario relates to the use of multi Radio Access Technologies (RAT)-Dual Connectivity (DC) architectures. In this sense, the combination of different technologies (LTE V2X, NR V2X) and communication interfaces (LTE Uu, NR Uu, PC5 for LTE SL and NR SL) is possible. This involves the need to combine V2V, V2I and V2N communications. The MR-DC approach can ensure robust and reliable communications because the same information is sent redundantly over several interfaces. On the other hand, thanks to V2I and V2N communications, the communications range can be extended. However, in both cases, an increase in communication latency must be taken into account because the traffic must pass through transmission nodes. Thus, different forms of communication can be used depending on the potential requirements of each service, as shown in Table 1 and Table 2. Additionally, our premise is that because it is possible to establish V2X communications with different technologies, the high transmission rates, extremely low latencies and high reliability offered by 5G NR networks can be exploited for advanced use cases such as those shown in Table 2. The following section describes the need for the use of MR-DC architectures that combine different communication interfaces, radio access technologies and cross-border operation to guarantee the Quality of Service (QoS) of advanced use cases in multi-operator scenarios.
5. MR-DC Architectures for Multi-RAT V2X
The progressive adoption of 5G by a LTE operator is key for fostering sustained network growth and tackle crucial, safety-related aspects such as network communications reliability. Already considered by 3GPP Release 16 (Rel-16) in their coexistence scenarios, TS 22.186 [27] paves the way for introducing solutions with multiple RATs (multi-RATs). Note that the coexistence aspects stated by Rel-16 make possible the simultaneous use of multiple 3GPP RATs for direct sidelink transmissions—both NR, and Evolved Universal Terrestrial Radio Access (E-UTRA) based—but there is no mutual inter-operation of NR and LTE sidelink with each other.
As an example, Figure 12 shows a cross-border scenario (such as the studied by the European Commission funded 5G-CARMEN project [28]) with MR-DC, and multi-RAT in a generic 5G Non-StandAlone (NSA) deployment. Here, cooperative maneuvering procedures are expected to begin among road vehicles 2 km ahead (some of them driving on the opposite side of the transnational border) within 1 min of the reception of a back-situation awareness message concerning the arrival of an emergency vehicle. Assuming that multiple technology interfaces may be potentially involved (NR Uu, NR PC5, LTE Uu, and LTE PC5) the cooperative maneuvering action requires that several vehicles attached to diverse networks would be able to determine, in advance, in a fast way, and at a certain point in time, whether they are in risk of re-selecting or switching to another network technology. Besides, unforeseen circumstances, like transient radio coverage fluctuations, etc., reasonably worsen the complexity of predicting in a timeline the likely future onset of such network events. Three possible, potentially coexisting, solutions to achieve robustness through redundancy are shown in Figure 12:
- 1.
- Selection of multiple interfaces: use of NR PC5 in addition to the NR Uu interface communications (e.g., simultaneous transmissions via PC5 and Uu interface);
- 2.
- Dual RAT Uu transmissions: (NR and LTE Uu communications);
- 3.
- Multi-RAT: mutual inter-operation of NR and LTE sidelink communications;
- 4.
- Cross-RAT: coexistence of LTE and 5G sidelink with no inter-operation.
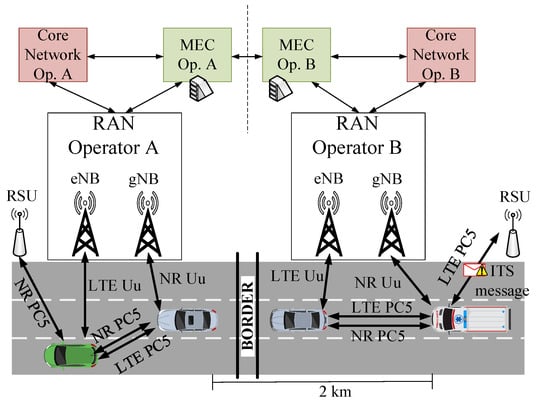
Figure 12.
Example of joint Cooperative Maneuvering and Back-Situation Awareness involving multi-RAT V2X.
Figure 12.
Example of joint Cooperative Maneuvering and Back-Situation Awareness involving multi-RAT V2X.
In these scenarios, it is essential to assess the reliability of the redundant interfaces. Managing this also seems natural because there are mechanisms, such as marking the packets as redundant via enhancements in the protocol stack, that allow discarding redundant packets that no longer serve their purpose. In addition, when managing such multi-RAT V2X networks, trustworthiness on the available network interfaces impacts on the communication network deploying problem and defines the sustainable growth of capacity provisioning by an MNO. It seems reasonable to anticipate the existence of more reliable road areas that will ensure automated driving, for example, where the Uu interface serves vehicles uninterruptedly, assisted by a dependable PC5 interface, assuring an up-to-date map of neighboring vehicles; but also degraded areas will exist, where the quality of the redundant communication channels will drop and may trigger lowering a degree of maneuvering assistance, losing any assistance at all, resorting to on-board sensors, or to manual driving.
Thus, a multi-RAT V2X use case-aware approach for improved reliability that has in-built consideration of the performance characteristics motivated by the use of 3GPP MR-DC seems interesting. It may also be reasoned that being aware of the underlying 3GPP radio access support for DC UEs could be useful to assure reliability.
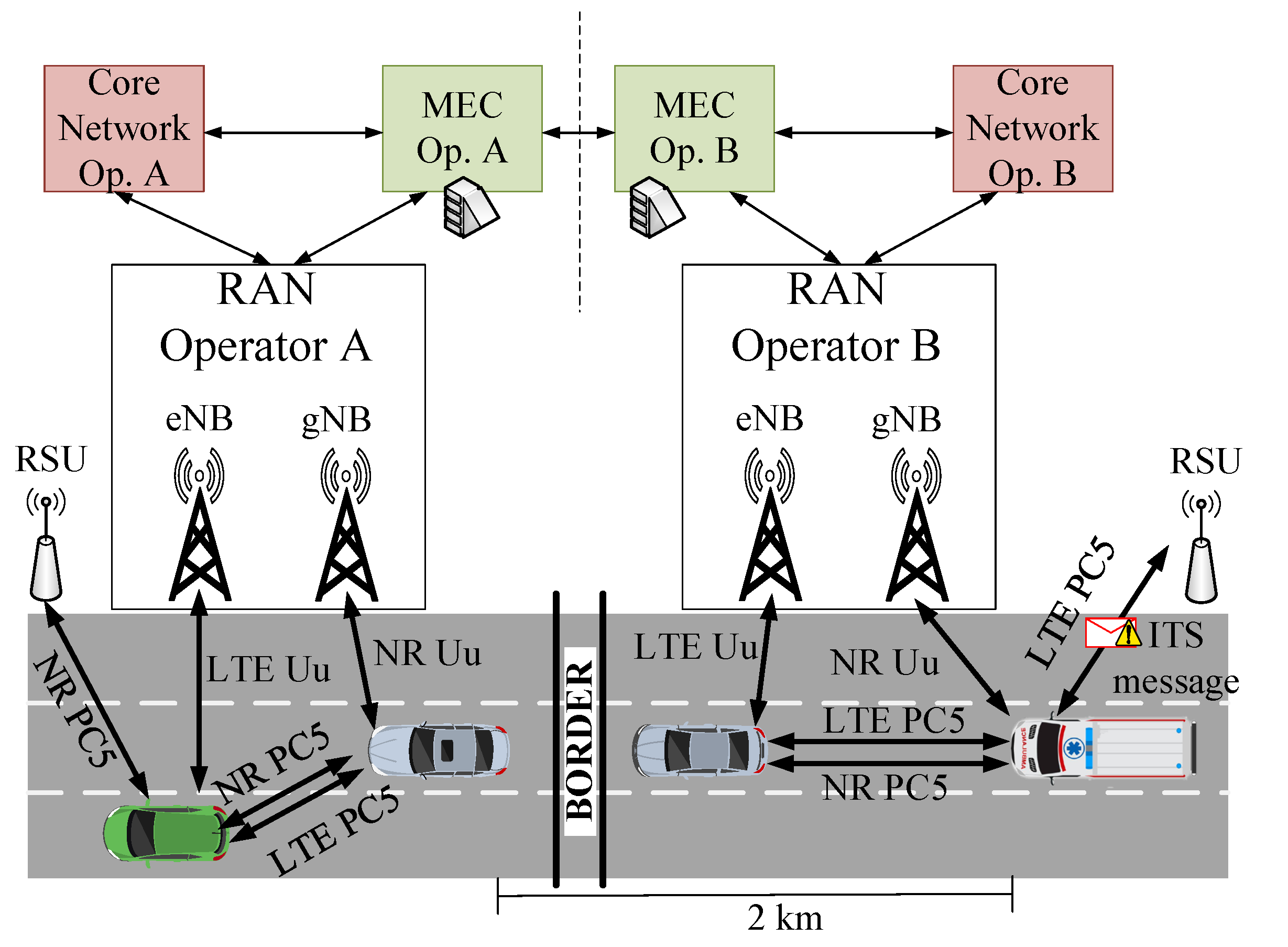
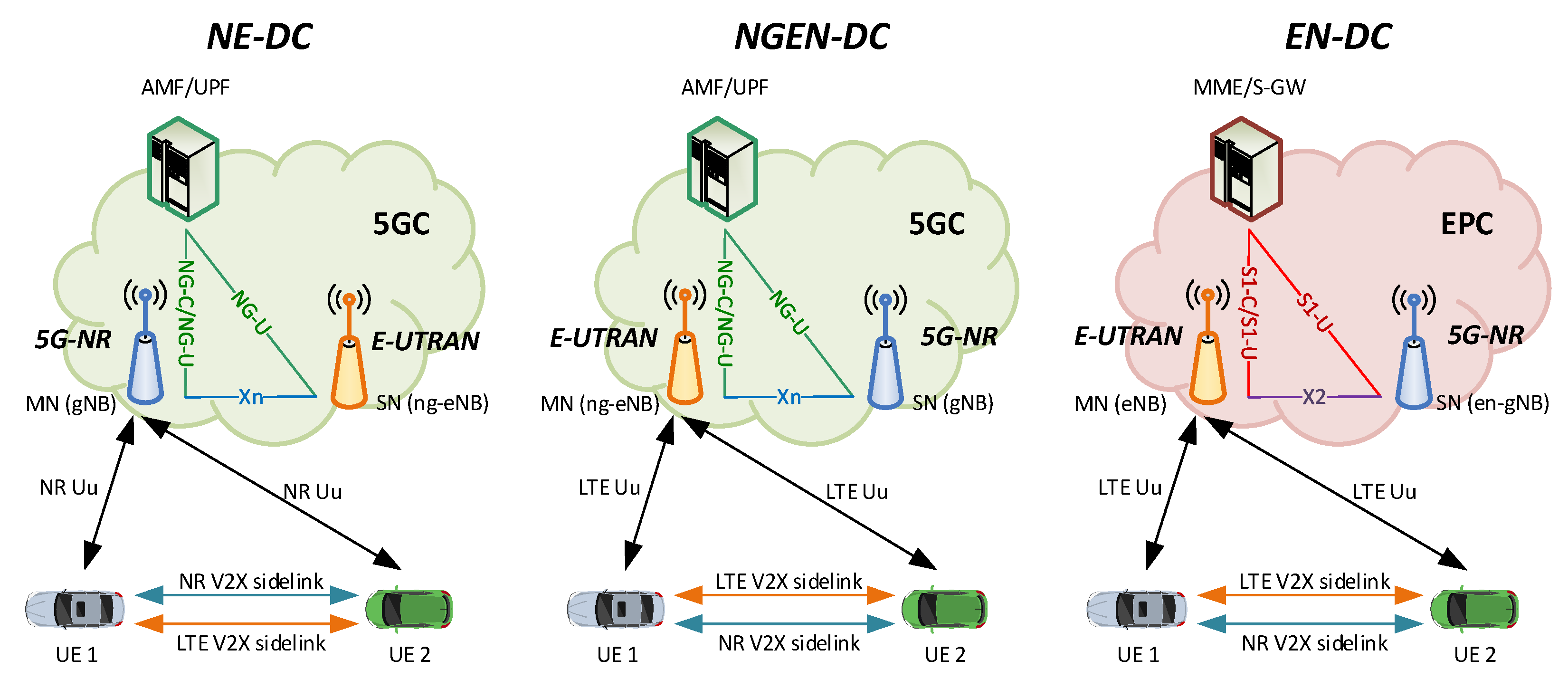
When building on the multi-connectivity operation options using E-UTRA and NR radio access technologies proposed by 3GPP Technical Specification (TS) 37.340 [7], several MR-DC multi-RAT scenarios may be envisioned, which encompass both LTE V2X sidelink communications and NR sidelink communications. However, note that in Rel-16 only the Master Node (MN) is allowed to control and configure the UEs performing NR sidelink communications and or LTE V2X sidelink communications [7]. This implies that the Secondary Node (SN) is not allowed to use (initiate) an E-UTRA Radio Resource Control (RRC) Connection Reconfiguration procedure or an NR RRC Reconfiguration with sidelink fields for LTE sidelink or NR sidelink. That the MN would be the entity in charge of receiving this control signaling yields three option (Figure 13):
- 1.
- NR-E-UTRA Dual Connectivity (NE-DC): standalone gNB, a 5G NR node, connected to the 5G Core (5GC), and sidelink communications controlled/configured by the MN (a 5G gNB);
- 2.
- NG-RAN E-UTRA-NR Dual Connectivity (NGEN-DC): standalone next-generation eNB (ng-eNB), which is an E-UTRAN node (LTE radio) with the capability to connect to the 5GC, and sidelink communications controlled/configured by ng-eNB (MN);
- 3.
- E-UTRAN NR Dual Connectivity (EN-DC): standalone LTE eNB connected to the Evolved Packet Core (EPC), and sidelink communications controlled/configured by eNB (MN).
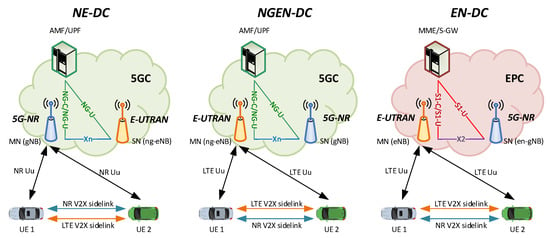
Figure 13.
Multi-RAT V2X together with MR-DC architectures: UE configured for either NE-DC (left), NGEN-DC (center), or EN-DC (right).
Figure 13.
Multi-RAT V2X together with MR-DC architectures: UE configured for either NE-DC (left), NGEN-DC (center), or EN-DC (right).
An interesting conclusion to the considerations made in this paper is that a smart approach to capacity provisioning fosters a more sustainable growth in the adoption of V2X for ITS. Therefore, it seems promising to regionally manage the multi-RAT nature of a heterogeneous network offering V2X so as to diversify RAT selection decisions associated to pre-defined geographical regions matching the statistical triggering of MR-DC procedures. This approach may be justified given that, typically, the reliability experienced by vehicular UEs is spatially correlated. Furthermore, this strategy may be the best one when the data available from specific UEs is scarce, but their recent geographical position is known, and it may also be deduced from prior knowledge about the successive geographical triggering of MR-DC procedures.
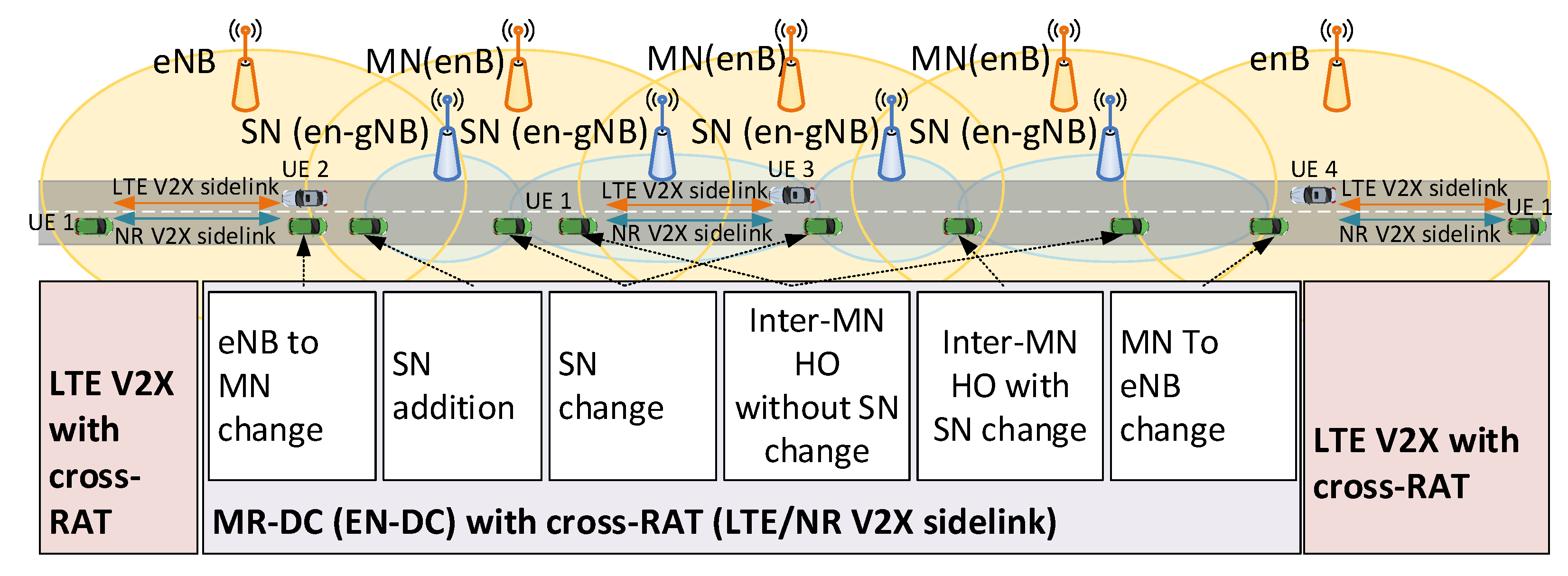
For example, Figure 14 shows a UE (green vehicle) along a road covered by a 5G NSA deployment with EN-DC architecture. As shown, the UE is expected to experience several MR-DC procedures as it enters the region with 5G coverage, crosses the boundaries between MNs, between SNs and leaves the region with 5G non-standalone coverage. A possible approach to clarify multi-RAT selection decisions is to segment the area into geographical zones according to the overall reliability and range related KPIs experienced for each of the RATs considered, and associate each zone with a specific multi-RAT decision potentially satisfying the QoS requirements. In the case that a RAT has a good reliability, it could be of use for long-range sensitive use cases (e.g., the cooperative maneuvering) where remote alerts and reaching vehicles far away in a reliable way is a must. Furthermore, the QoS conditions of multi-RAT may be the basis for recommending, e.g., different automation levels according to the expected performance of the 5G communication system for the support of autonomous driving in the different geographical zones. Our future work is aimed at simulating the performance of MR-DC architectures with different connection interfaces in non-standalone 5G networks. Thus, coverage distances are expected to improve and network reliability will increase due to redundant information being sent over several interfaces. This will enable new use cases to be offered efficiently. In addition, since 5G networks contemplate the use of numerologies, it is necessary to evaluate, according to the standard specifications, with which sub-carrier spacing and modulation schemes the maximum performance in V2X communications is obtained.
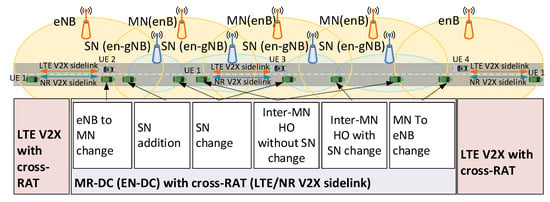
Figure 14.
Multi-RAT vehicle traveling along a road requiring successive MR-DC procedures.
In order to perform simulations in MR-DC scenarios we plan to integrate the openCV2X simulator modules with Simu5G [29]. Thus, scenarios with dual connections, multiple connection interfaces and transmission modes will be configured.
6. Conclusions and Future Work
This paper has provided an overview of the communication modes and potential requirements for use cases of C-V2X technology in intelligent transportation systems. Such services can be adapted to sustainable mobility scenarios where it is necessary to define, in heterogeneous environments with multiple radio access technologies and mobile operators, how and when to use different communication interfaces to meet basic and advanced application requirements. The results obtained through simulations have shown that the centralized communication mode achieves higher PDR levels for larger coverage distances. However, a non-centralized mode does not require cellular network coverage and vehicles can manage the use of radio resources through a pre-established mechanism. Additionally, our proposal has included the use of the MR-DC approach to improve transmission rates and communications reliability. The latter by exploiting key performance and robustness indicators of 5G NR networks for advanced use cases.
As future work, the performance of the communication modes and resource allocation mechanisms defined for 5G NR networks will be evaluated. Thus, it is expected that use cases with strict potential requirements can be exploited, for example, in autonomous vehicle applications.
Author Contributions
Investigation, E.E.G. and D.G.-R.; Supervision, J.F.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the European Union’s H2020-ICT-18-2018 action “5G for cooperative, connected and automated mobility”, for project “5G for Connected and Automated Road Mobility in the European unioN (5G-CARMEN)” under grant agreement no. 825012.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Sachse, T.; Gräbner, O.; Möckel, M.; Kaschwich, C.; Plättner, J. Intelligent traffic control and optimization with cooperative systems on the eHighway: Using the electrified highway-infrastructure for heavy good vehicles and the advanced traffic control center with V2X for a more efficient and safer traffic (for all road users). In Proceedings of the 2014 International Conference on Connected Vehicles and Expo (ICCVE), Vienna, Austria, 3–7 November 2014; pp. 558–564. [Google Scholar] [CrossRef]
- Tal, I.; Zhu, T.; Muntean, G.M. Short paper: On the potential of V2X communications in helping electric bicycles saving energy. In Proceedings of the 2013 IEEE Vehicular Networking Conference, Boston, MA, USA, 16–18 December 2013; pp. 218–221. [Google Scholar] [CrossRef]
- Kenney, J.B. Dedicated Short-Range Communications (DSRC) Standards in the United States. Proc. IEEE 2011, 99, 1162–1182. [Google Scholar] [CrossRef]
- 3GPP TSG SA. Study on LTE Support for Vehicle-To-Everything (V2X) Services. TR 22.885 V14.0.0, 3GPP. 2015. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=2898 (accessed on 20 February 2022).
- 3GPP TSG SA. Study on Enhancement of 3GPP Support for 5G V2X Services. TR 22.886 V16.2.0, 3GPP. 2018. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3108 (accessed on 20 February 2022).
- Garcia-Roger, D.; González, E.E.; Martín-Sacristán, D.; Monserrat, J.F. V2X Support in 3GPP Specifications: From 4G to 5G and Beyond. IEEE Access 2020, 8, 190946–190963. [Google Scholar] [CrossRef]
- 3GPP TSG RAN. Evolved Universal Terrestrial Radio Access (E-UTRA) and NR; Multi-Connectivity; Stage 2. TS 37.340 V16.3.0, 3GPP. 2020. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3198 (accessed on 20 February 2022).
- 3GPP TSG RAN. Evolved Universal Terrestrial Radio Access (E-UTRA); Physical Layer Procedures. TS 36.213 V16.5.0, 3GPP. 2021. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=2427 (accessed on 20 February 2022).
- 3GPP TSG RAN. Study on NR Vehicle-to-Everything (V2X). TR 38.885 V16.0.0, 3GPP. 2019. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3497 (accessed on 20 February 2022).
- Naik, G.; Choudhury, B.; Park, J. IEEE 802.11bd & 5G NR V2X: Evolution of Radio Access Technologies for V2X Communications. arXiv 2019, arXiv:1903.08391. [Google Scholar]
- CAR 2 CAR Communication Consortium. Guidance for Day 2 and Beyond Roadmap; Technical Report. 2019. Available online: https://www.car-2-car.org/fileadmin/documents/General_Documents/C2CCC_WP_2072_RoadmapDay2AndBeyond.pdf (accessed on 20 February 2022).
- Mansouri, A.; Martinez, V.; Härri, J. A First Investigation of Congestion Control for LTE-V2X Mode 4. In Proceedings of the 2019 15th Annual Conference on Wireless On-demand Network Systems and Services (WONS), Wengen, Switzerland, 22–24 January 2019; pp. 56–63. [Google Scholar] [CrossRef]
- 3GPP TSG RAN. Evolved Universal Terrestrial Radio Access (E-UTRA) and Evolved Universal Terrestrial Radio Access Network (E-UTRAN); Overall Description; Stage 2. TS 36.300 V16.5.0, 3GPP. 2021. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=2430 (accessed on 20 February 2022).
- Molina-Masegosa, R.; Gozalvez, J. LTE-V for Sidelink 5G V2X Vehicular Communications: A New 5G Technology for Short-Range Vehicle-to-Everything Communications. IEEE Veh. Technol. Mag. 2017, 12, 30–39. [Google Scholar] [CrossRef]
- 3GPP TSG RAN. Evolved Universal Terrestrial Radio Access (E-UTRA); Medium Access Control (MAC) Protocol Specification. TS 36.321 V16.4.0, 3GPP. 2021. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=2437 (accessed on 20 February 2022).
- Nabil, A.; Marojevic, V.; Kaur, K.; Dietrich, C.B. Performance Analysis of Sensing-Based Semi-Persistent Scheduling in C-V2X Networks. arXiv 2018, arXiv:1804.10788. [Google Scholar]
- Chen, M.; Chai, R.; Hu, H.; Jiang, W.; He, L. Performance Evaluation of C-V2X Mode 4 Communications. In Proceedings of the 2021 IEEE Wireless Communications and Networking Conference (WCNC), Nanjing, China, 29 March–1 April 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Eckermann, F.; Kahlert, M.; Wietfeld, C. Performance Analysis of C-V2X Mode 4 Communication Introducing an Open-Source C-V2X Simulator. arXiv 2019, arXiv:1907.09977. [Google Scholar]
- McCarthy, B.; O’Driscoll, A. OpenCV2X Mode 4: A Simulation Extension for Cellular Vehicular Communication Networks. In Proceedings of the 2019 IEEE 24th International Workshop on Computer Aided Modeling and Design of Communication Links and Networks (CAMAD), Limassol, Cyprus, 11–13 September 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Sempere-García, D.; Sepulcre, M.; Gozalvez, J. LTE-V2X Mode 3 scheduling based on adaptive spatial reuse of radio resources. Ad Hoc Netw. 2021, 113, 102351. [Google Scholar] [CrossRef]
- 3GPP TSG RAN. Study on LTE-Based V2X Services. TR 36.885 V14.0.0, 3GPP. 2016. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=2934 (accessed on 20 February 2022).
- OMNeT++—Discrete Event Simulator. 2021. Available online: https://omnetpp.org/ (accessed on 21 May 2021).
- SimuLTE—LTE User Plane Simulation Model for INET & OMNeT++. 2021. Available online: https://simulte.com/index.html (accessed on 21 May 2021).
- INET Framework. 2021. Available online: https://inet.omnetpp.org/ (accessed on 21 May 2021).
- Veins—The Open Source Vehicular Network Simulation Framework. 2021. Available online: https://veins.car2x.org/ (accessed on 21 May 2021).
- SUMO—Simulation of Urban MObility. 2021. Available online: https://www.eclipse.org/sumo/ (accessed on 21 May 2021).
- 3GPP TSG SA. Service Requirements for Enhanced V2X Scenarios. TS 22.186 V16.2.0, 3GPP. 2019. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3180 (accessed on 20 February 2022).
- 5G-CARMEN. 2022. Available online: https://5gcarmen.eu/ (accessed on 15 March 2022).
- 5G New Radio User Plane Simulation Model for INET & OMNeT++. 2022. Available online: http://simu5g.org/ (accessed on 16 March 2022).
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).