
An Optimized Vector Tracking Architecture for Pseudo-Random Pulsing CDMA Signals


Abstract
1. Introduction
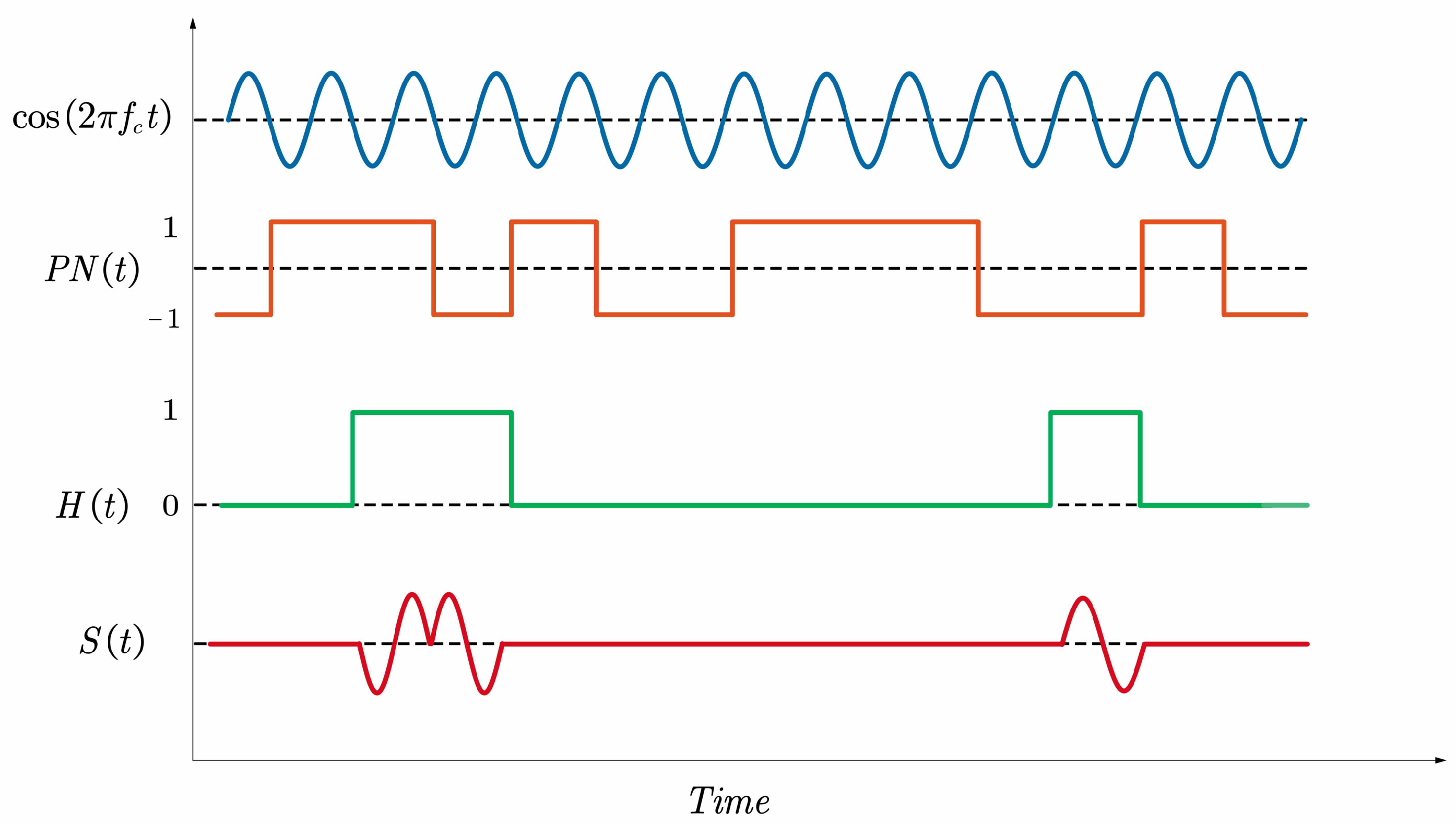
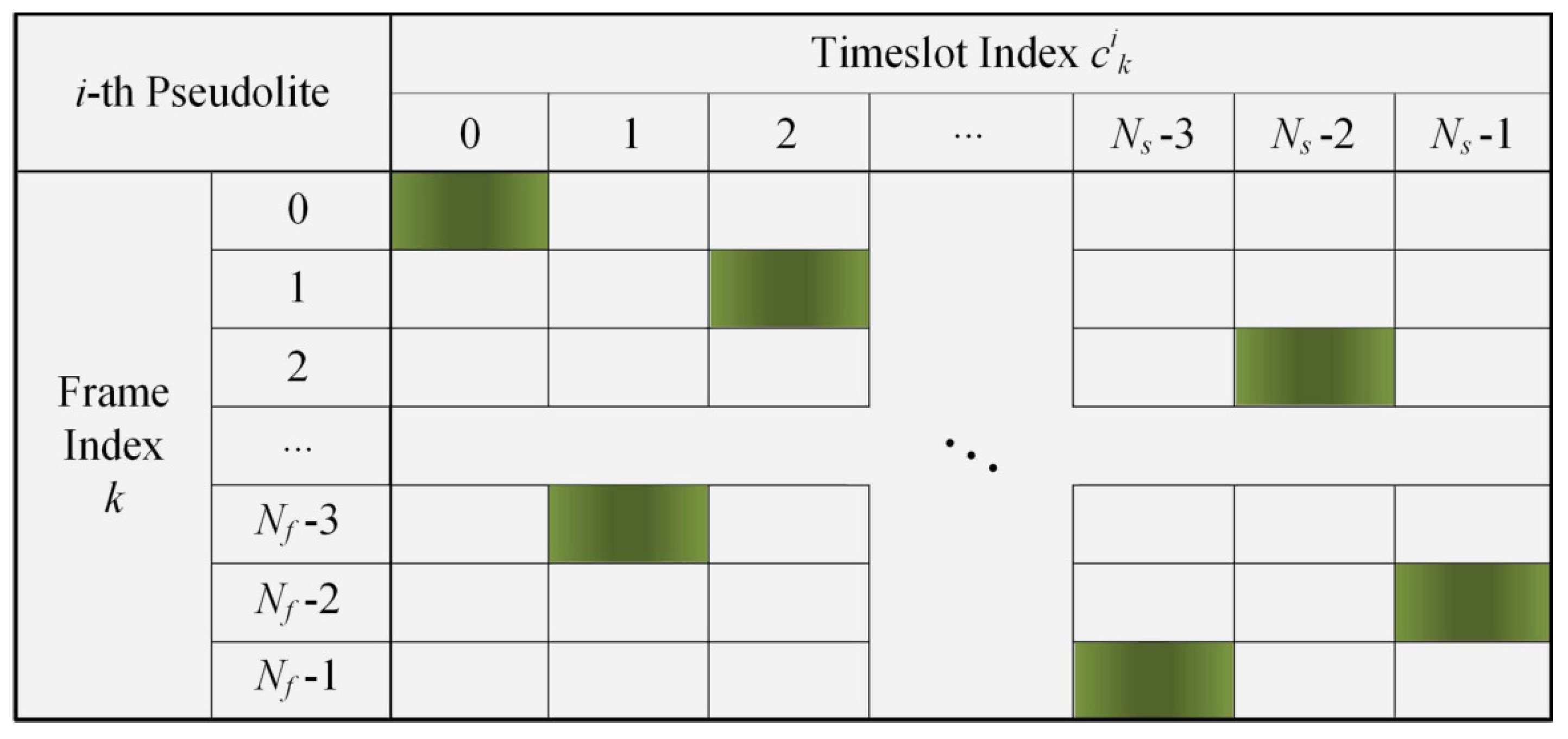
2. Pseudo-Random Pusling Signal Structure
- The value of ranges from 0 to .
- The active timeslots of different pseudolites do not overlap.
3. Problem Description
4. The Proposed VTL Architecture
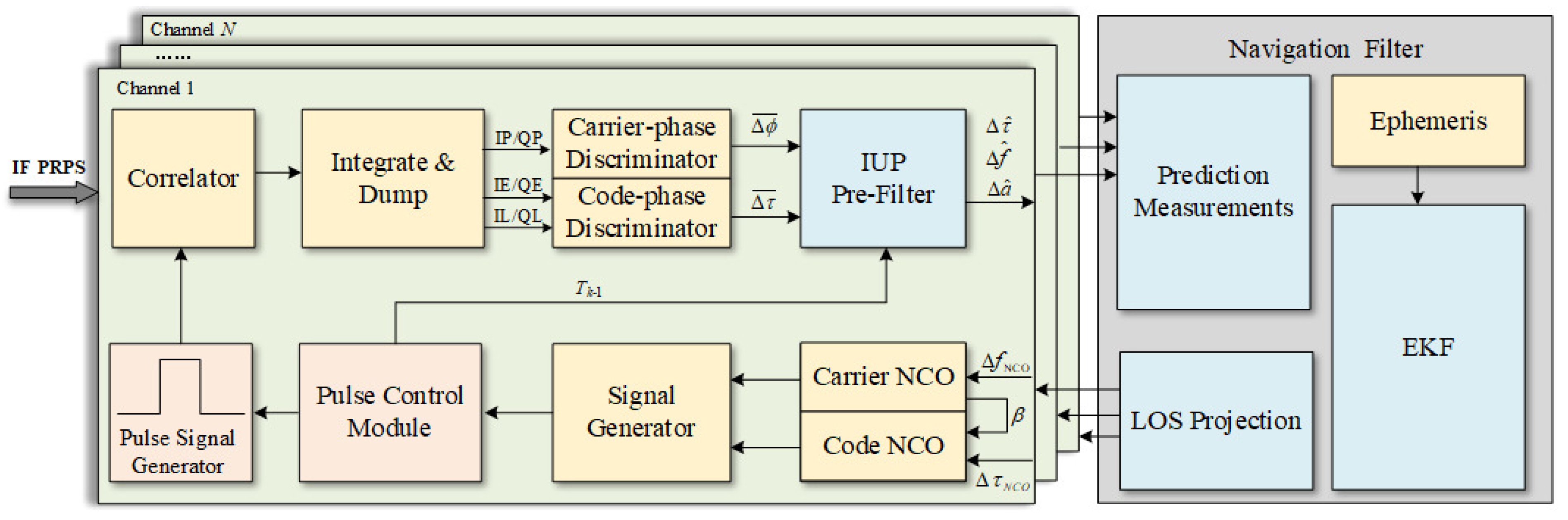
4.1. Architecture of the IUPPM-VTL
4.2. Pre-Filter Model
- Predictionwhere is the priori state estimation, and is the priori estimation covariance matrix calculated by projecting the error covariance ahead.
- Correction
4.3. Navigation Filter Model
- Step1: Predict the measurements according to Equation (32) so that they can be sampled at the same time.
- Step2: Estimate the priori state: .
- Step3: Calculate the priori estimation covariance: .
- Step4: Calculate the Kalman gain: .
- Step5: Estimate the posterior state: .
- Step6: Compute the posterior estimation covariance: .
- Step7: LOS Projection: .
- Step8: Feedback to NCO: as described in Equation (46).
5. Simulation and Results
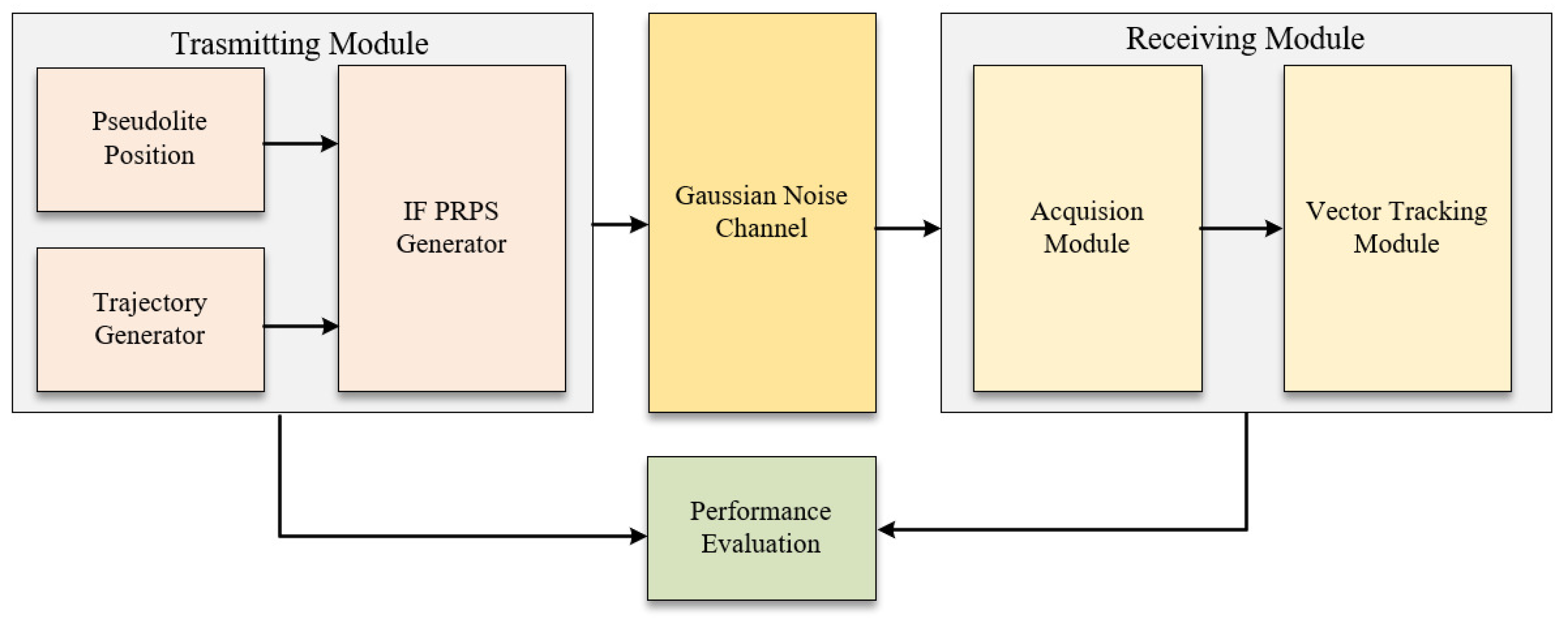
5.1. Simulation Setup
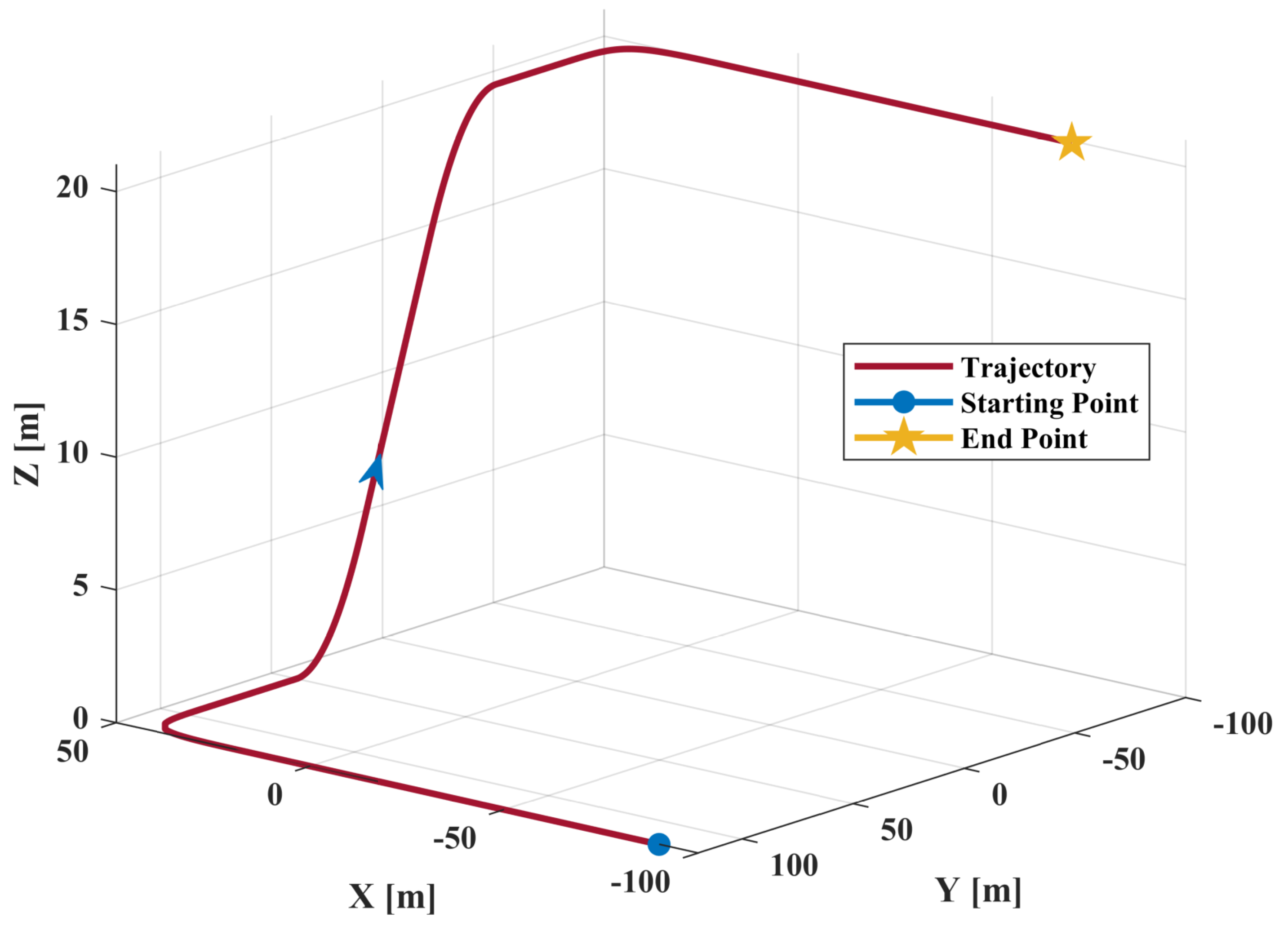
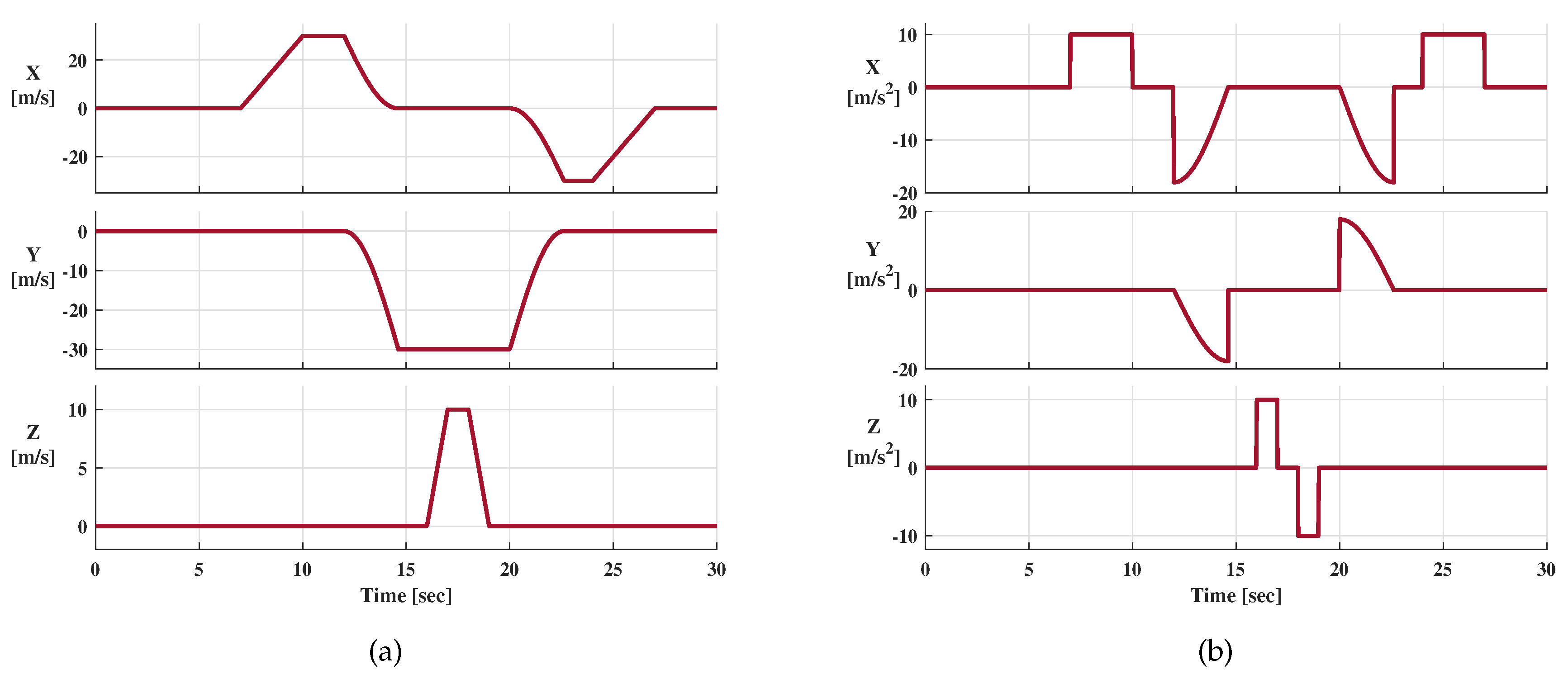
- The receiver is in a static state during 0∼7 s, and the relative coordinate of the starting point is (m).
- Conduct a constant acceleration movement in the direction with an acceleration of 10 m/s and a duration of 2 s.
- Stop acceleration and maintain a constant velocity state for 1 s.
- Make a circular motion with a circle radius of 50 m.
- The receiver moves toward the direction and keeps moving at a constant speed for 1.382 s.
- Apply a constant acceleration in the direction. The acceleration is 10 m/s, and the duration is 1 s.
- Stop acceleration and maintain a constant velocity state for 1 s.
- Perform a deceleration movement in the direction until and the acceleration is −10 m/s.
- Keep a uniform speed in the direction for 1 s.
- Make a circular motion with a circle radius of 50 m.
- The receiver moves toward the direction and keeps moving at a constant speed for 1.382 s.
- Perform a deceleration movement in the direction until and the acceleration is −10 m/s.
- The receiver remains stationary for 3 s.
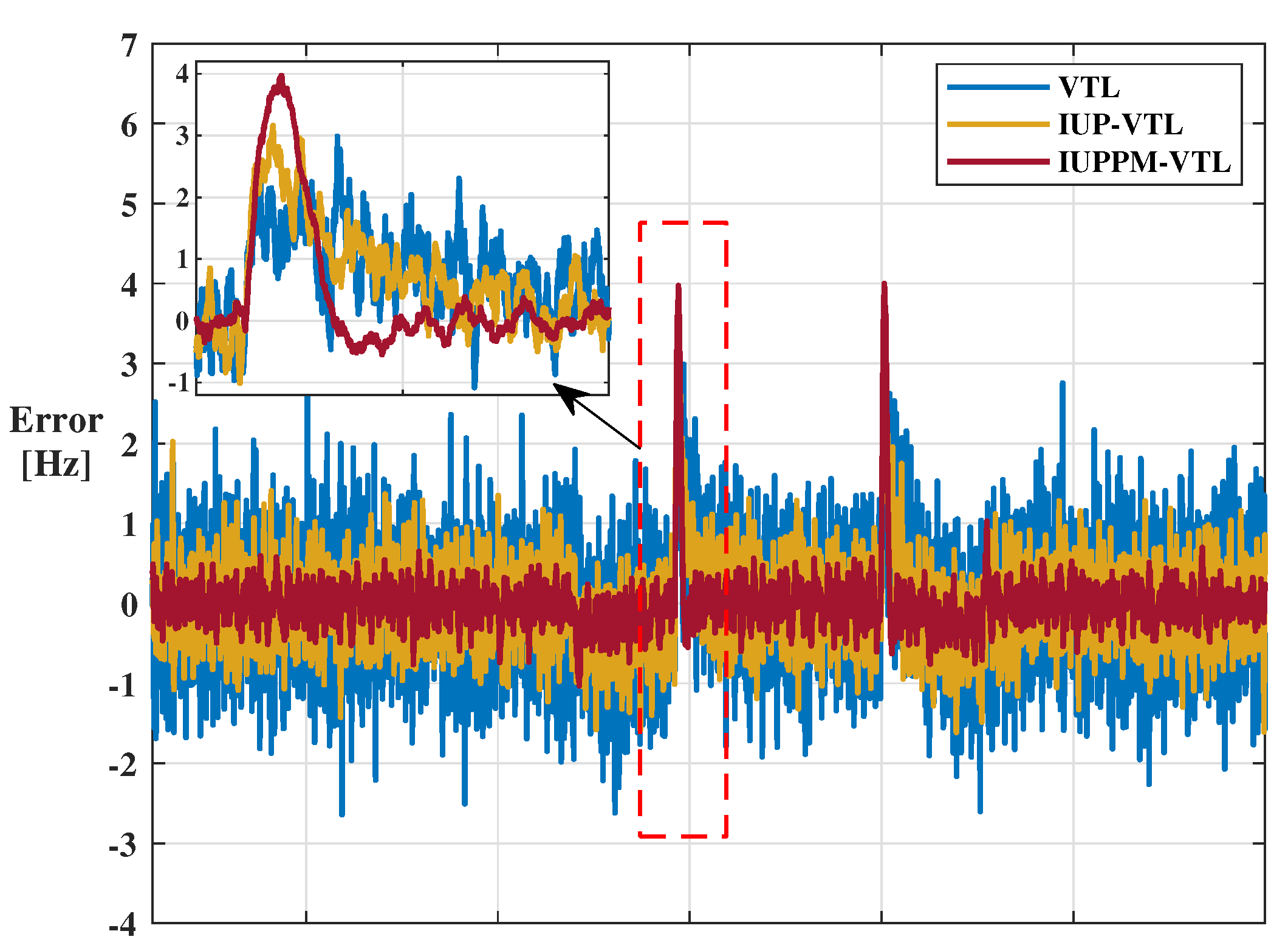
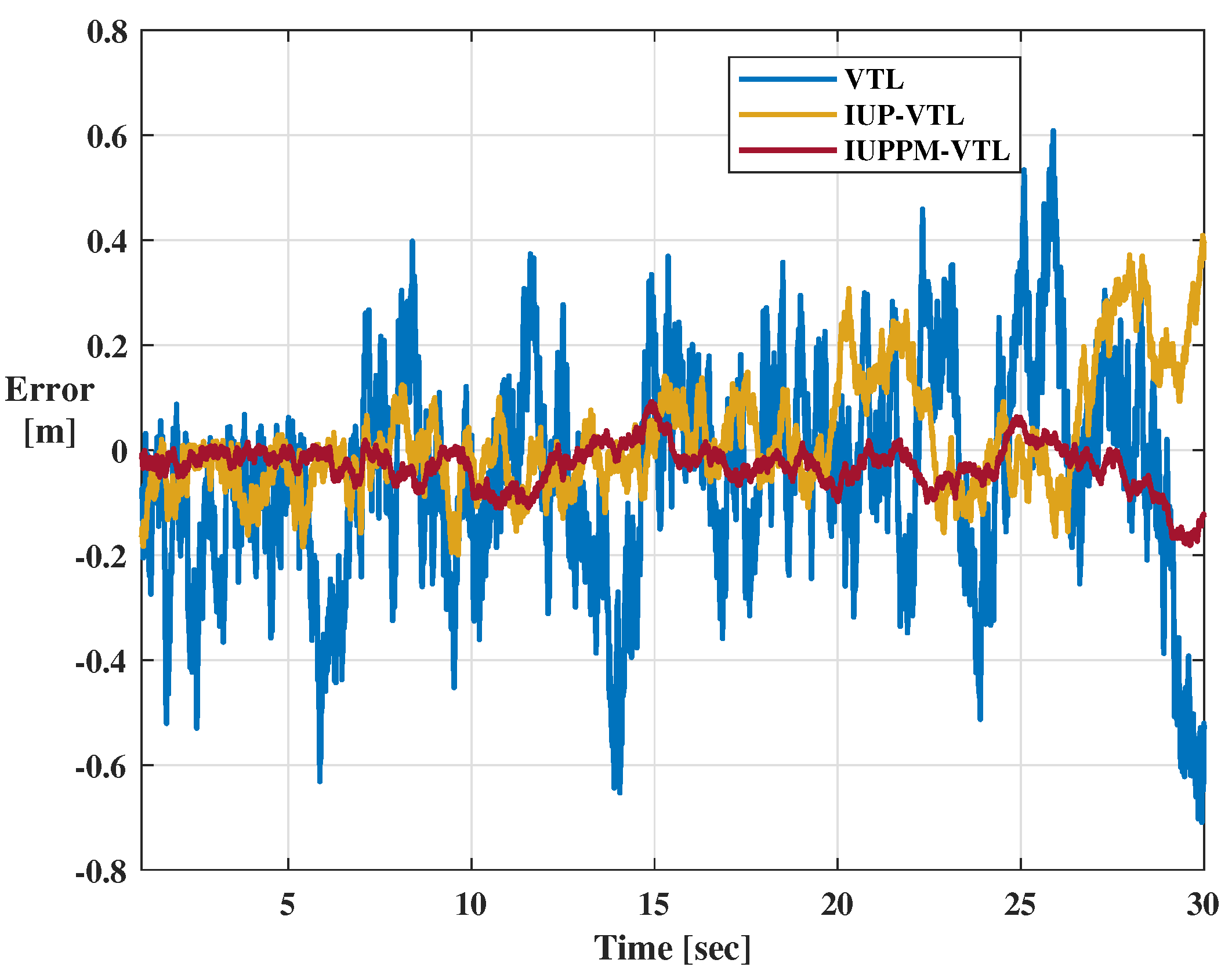
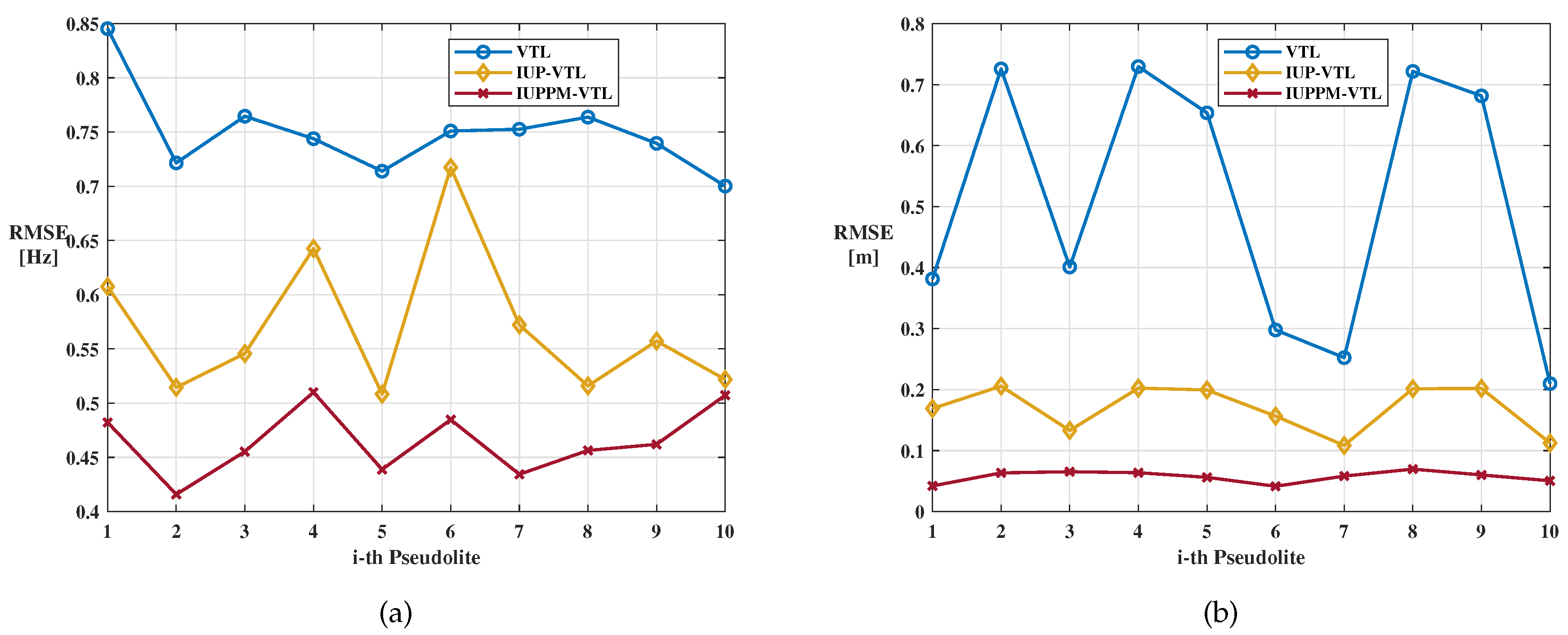
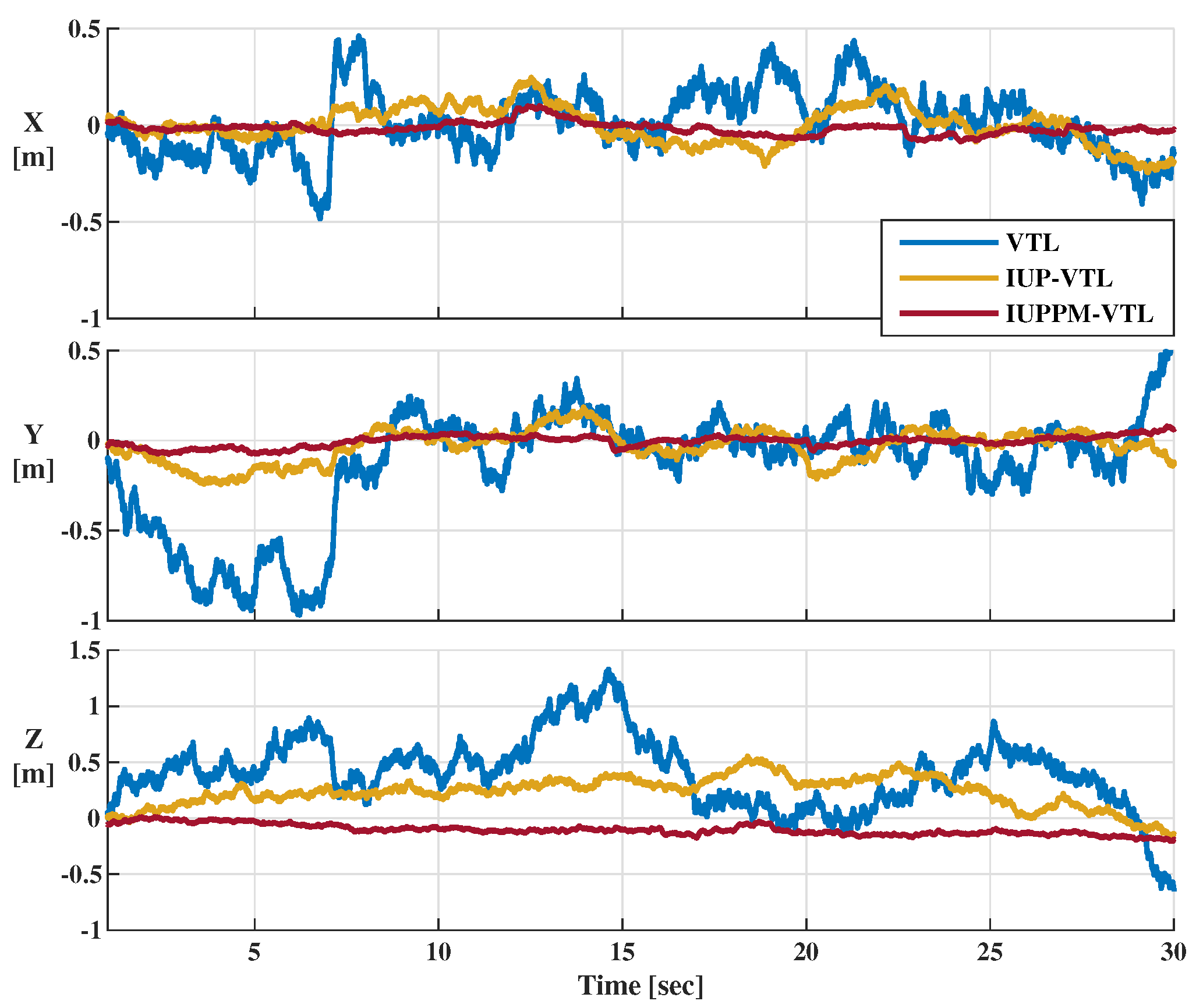
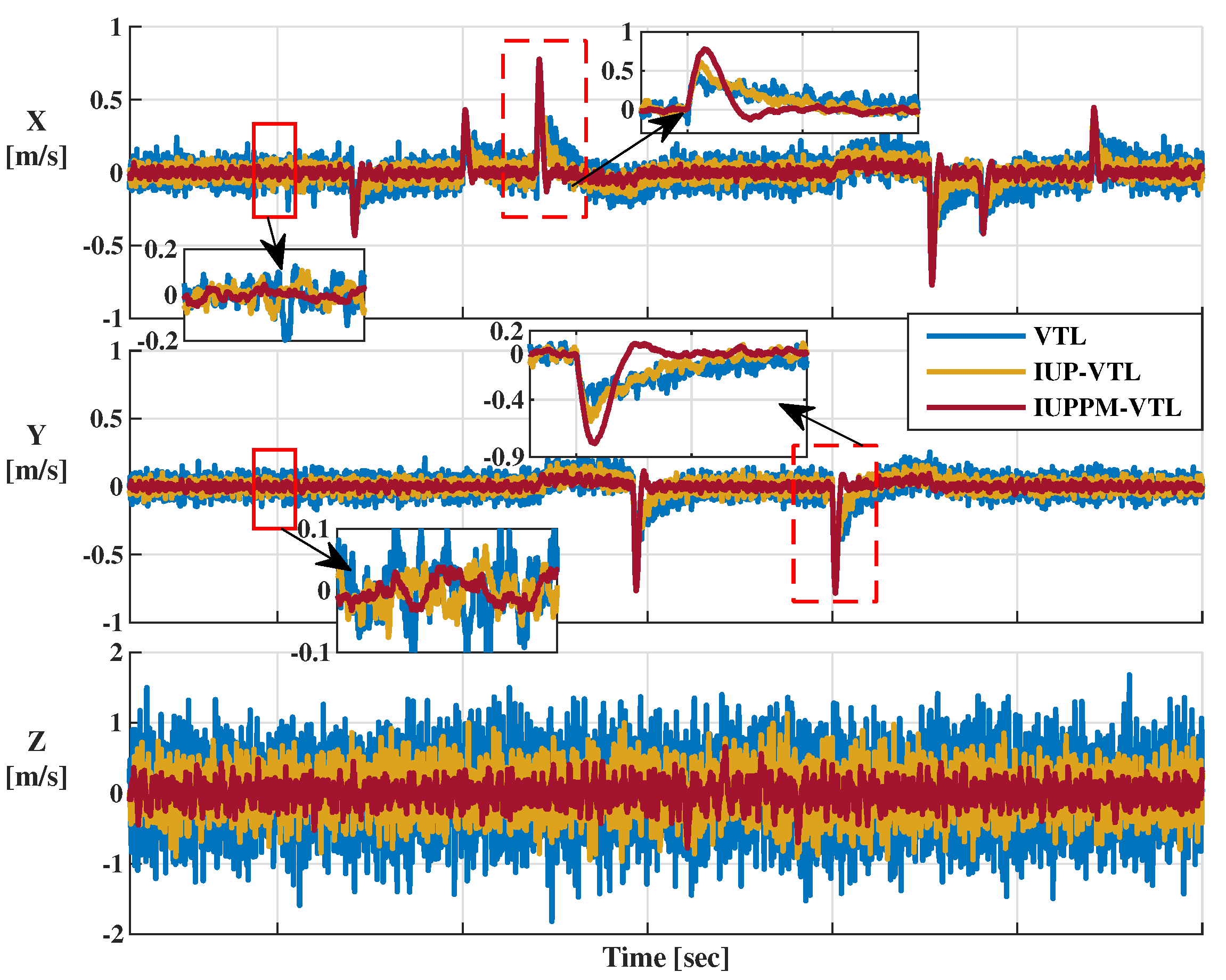
5.2. Simulation Results
6. Conclusions
- The discriminator model is affected by irregular pulsing periods in PLPS.
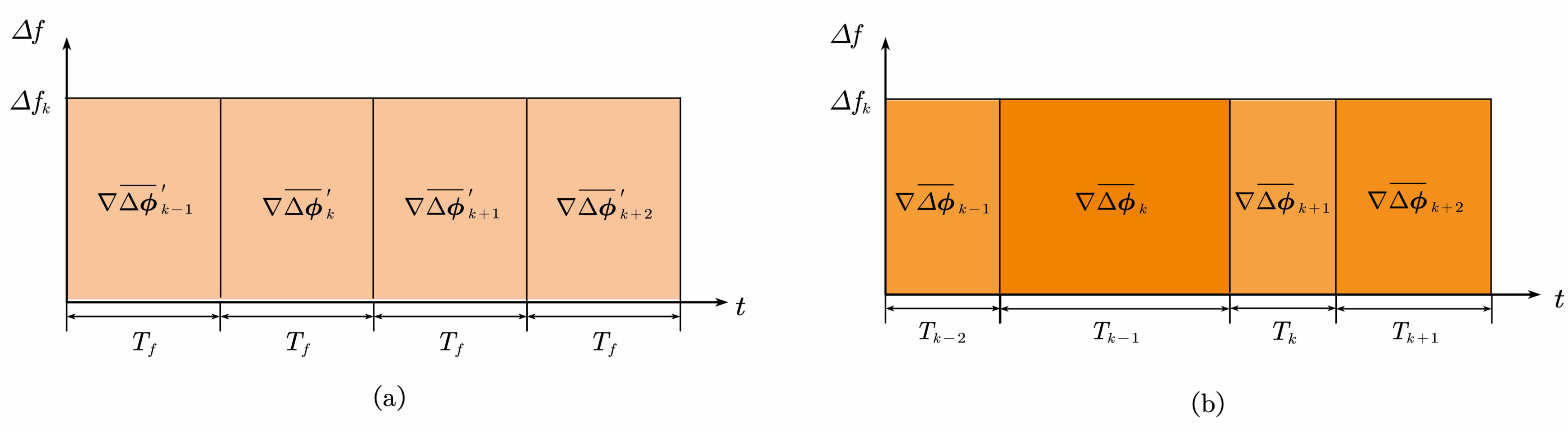
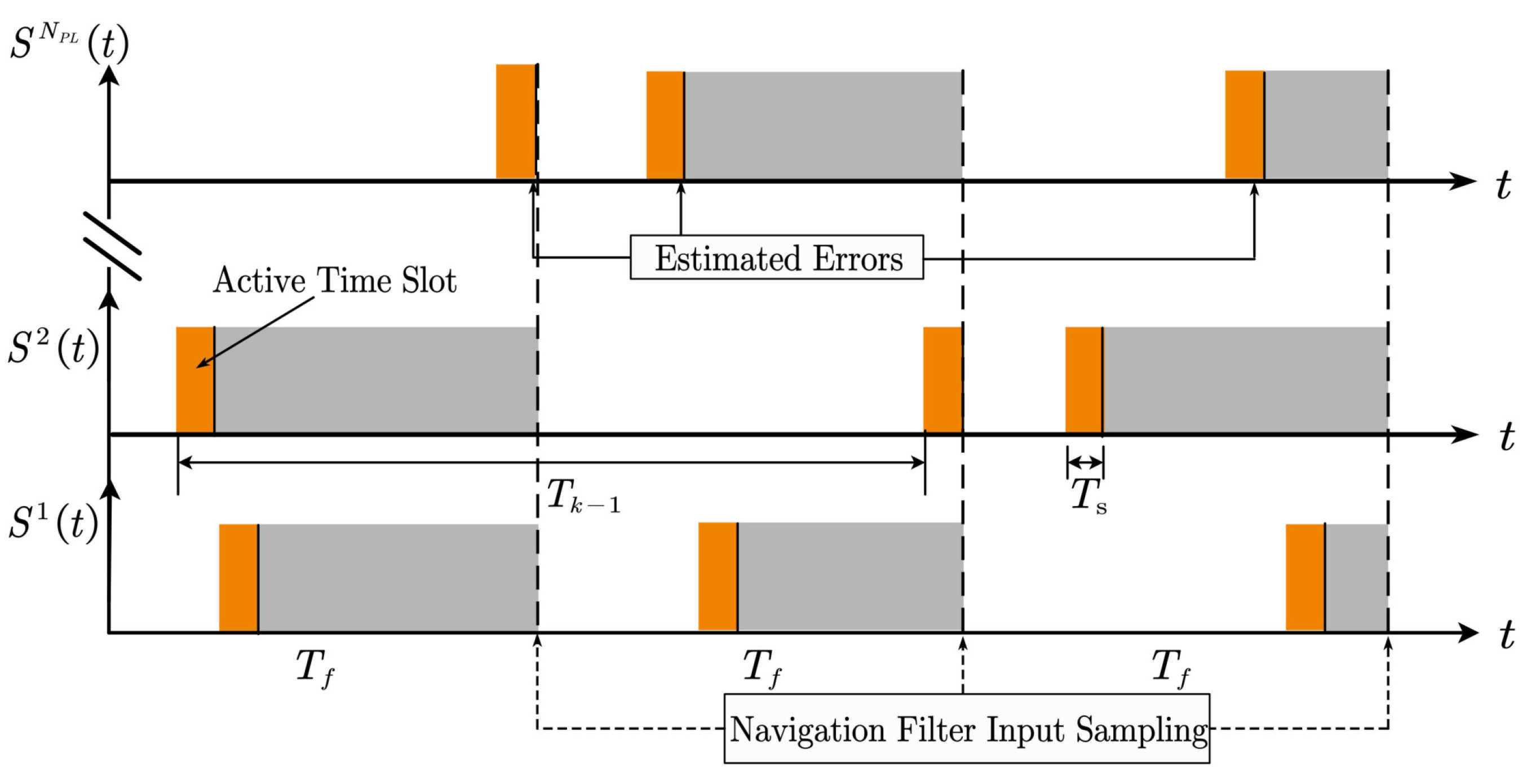
- The sampling time of the navigation filter inputs is inconsistent and time-varying in PLPS.
Author Contributions
Funding
Conflicts of Interest
References
- Shoushtari, H.; Willemsen, T.; Sternberg, H. Many Ways Lead to the Goal—Possibilities of Autonomous and Infrastructure-Based Indoor Positioning. Electronics 2021, 10, 397. [Google Scholar] [CrossRef]
- Chao, M.; Jinling, W.; Jianyun, C. Beidou Compatible Indoor Positioning System Architecture Design and Research on Geometry of Pseudolite. In Proceedings of the 2016 Fourth International Conference on Ubiquitous Positioning, Indoor Navigation and Location Based Services (UPINLBS), Shanghai, China, 2–4 November 2016; pp. 176–181. [Google Scholar]
- Zidan, J.; Adegoke, E.I.; Kampert, E.; Birrell, S.A.; Ford, C.R.; Higgins, M.D. GNSS Vulnerabilities and Existing Solutions: A Review of the Literature. IEEE Access. 2020, 4, 1–17. [Google Scholar] [CrossRef]
- Han, S.; Gong, Z.; Meng, W.; Li, C.; Gu, X. Future Alternative Positioning, Navigation, and Timing Techniques: A Survey. IEEE Wirel. Commun. 2016, 23, 154–160. [Google Scholar] [CrossRef]
- Yao, Z.; Lu, M. Spreading modulation techniques in satellite navigation. In Next-Generation GNSS Signal Design; Springer: Singapore, 2021; pp. 89–162. [Google Scholar]
- Yao, Z.; Lu, M.; Feng, Z.M. Quadrature multiplexed BOC modulation for interoperable GNSS signals. Electron. Lett. 2010, 46, 1234–1236. [Google Scholar] [CrossRef]
- Gao, G.X.; Sgammini, M.; Lu, M.Q.; Kubo, N. Protecting GNSS Receivers From Jamming and Interference. Proc. IEEE 2016, 104, 1327–1338. [Google Scholar] [CrossRef]
- Yassin, A.; Nasser, Y.; Awad, M.; Al-Dubai, A.; Liu, R.; Yuen, C.; Raulefs, R.; Aboutanios, E. Recent Advances in Indoor Localization: A Survey on Theoretical Approaches and Applications. IEEE Commun. Surv. Tutor. 2017, 19, 1327–1346. [Google Scholar] [CrossRef]
- Gezici, S.; Poor, H.V. Position estimation via ultra-wide-band signals. Proc. IEEE 2009, 97, 386–403. [Google Scholar] [CrossRef]
- Xie, T.; Jiang, H.J.; Zhao, X.J.; Zhang, C. A Wi-Fi-Based Wireless Indoor Position Sensing System with Multipath Interference Mitigation. Sensors 2019, 19, 3983. [Google Scholar] [CrossRef]
- Peral-Rosado, J.; Lopez-Salcedo, J.; Seco-Granados, G. Impact of frequency-hopping NB-IoT positioning in 4G and future 5G networks. In Proceedings of the 2017 IEEE International Conference on Communications Workshops (ICC Workshops), Paris, France, 21–25 May 2017; pp. 815–820. [Google Scholar]
- Politi, N.; Yong, L.; Faisal, K. Locata: A new technology for high precision positioning. In Proceedings of the European Navigation Conference, Naples, Italy, 3–6 May 2009; pp. 176–181. [Google Scholar]
- Kim, C.; So, H.; Lee, T.; Kee, C. A pseudolite-based positioning system for legacy GNSS receivers. Sensors 2014, 14, 6104–6123. [Google Scholar] [CrossRef]
- Li, X.; Zhang, P.; Huang, G.W.; Zhang, Q.; Guo, J.M.; Zhao, Y.Z.; Zhao, Q.Z. Performance analysis of indoor pseudolite positioning based on the unscented Kalman filter. Gps Solut. 2019, 23, 79. [Google Scholar] [CrossRef]
- Cobb, H.S. GPS Pseudolites: Theory, Design, and Applications. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 1997. [Google Scholar]
- Liu, X.; Yao, Z.; Lu, M.Q. Robust time-hopping pseudolite signal acquisition method based on dynamic Bayesian network. Gps Solut. 2021, 25, 1–14. [Google Scholar] [CrossRef]
- Elrod, B.D.; Van Dierendonck, A. Testing and evaluation of GPS augmented with pseudolites for precision approach applications. In Proceedings of the DSNS’93: 2nd International Symposium on Differential Satellite Navigation Systems, Amsterdam, The Netherlands, 29 March–2 April 1993; pp. 1269–1278. [Google Scholar]
- Borio, D.; O’Driscoll, C. Design of a General Pseudolite Pulsing Scheme. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 2–16. [Google Scholar] [CrossRef]
- Picois, A.V.; Samama, N. Near-Far Interference Mitigation for Pseudolites Using Double Transmission. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 2929–2941. [Google Scholar] [CrossRef]
- Elrod, B.; Barltrop, K.; Stafford, J.; Brown, D. Test results of local area augmentation of GPS with an in-band pseudolite. In Proceedings of the 1996 National Technical Meeting of The Institute of Navigation, Santa Monica, CA, USA, 22–24 January 1996; pp. 145–154. [Google Scholar]
- Barltrop, K.; Stafford, J.; Elrod, B.D. Local DGPS with pseudolite augmentation and implementation considerations for LAAS. In Proceedings of the 9th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1996), Kansas City, MO, USA, 17–20 September 1996; pp. 449–459. [Google Scholar]
- Di, W. Design of a Pulsing Scheme for BeiDou Pseudolites Signals. In Proceedings of the 3rd International Conference on Transportation Information and Safety, Wuhan, China, 25–28 June 2015; pp. 542–547. [Google Scholar]
- Tin Lian Abt, F.S.; Martin, S. Optimal Pulsing Schemes for Galileo Pseudolite Signals. J. Glob. Position. Syst. 2007, 6, 133–141. [Google Scholar]
- Cheong, J.W.; Dempster, R.C.A.G. Tracking of Time Hopped DS-CDMA Signals for Pseudolite-Based Positioning; IGNSS Symposium: Surfers Paradise, Australia, 2009. [Google Scholar]
- Yun, S.J.; Yao, Z.; Lu, M.Q. Variable update rate carrier tracking loop for time-hopping DSSS signals. IET Radar Sonar Navig. 2019, 13, 961–968. [Google Scholar] [CrossRef]
- Wang, J.H.; Xu, Y.; Luo, R.D.; Zhang, Y.; Yuan, H. Synchronisation method for pulsed pseudolite positioning signal under the pulse scheme without slot-permutation. IET Radar Sonar Navig. 2017, 11, 1822–1830. [Google Scholar] [CrossRef]
- Liu, K.; Guo, X.; Yang, J. Tracking loops with time-varying sampling periods for the TH-CDMA signal. In Proceedings of the 2016 IEEE International Conference on Signal and Image Processing (ICSIP), Beijing, China, 13–15 August 2016; pp. 508–513. [Google Scholar]
- Spilker, J.J.; Parkinson, B. Fundamentals of signal tracking theory. Prog. Astronaut. Aeronaut. 1996, 163, 245–328. [Google Scholar]
- Wang, H.; Cheng, Y.; Zhang, Y. Square-root cubature Kalman filter-based vector tracking algorithm in GPS signal harsh environments. IET Radar Sonar Navig. 2020, 14, 2027–2038. [Google Scholar] [CrossRef]
- Dietmayer, K.; Kunzi, F.; Garzia, F.; Overbeck, M.; Felber, D. Real Time Results of Vector Delay Lock Loop in a Light Urban Scenario. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; pp. 1230–1236. [Google Scholar]
- Bhattacharyya, S. Performance and Integrity Analysis of the Vector Tracking Architecture of GNSS Receivers. Ph.D. Thesis, University of Minnesota, Minneapolis, MN, USA, 2012. [Google Scholar]
- Matthew, L. Modeling and Performance Analysis of GPS Vector Tracking Algorithms. Ph.D. Thesis, Electrical Engineering, Auburn University, Auburn, AL, USA, 2009. [Google Scholar]
- Chen, X.; Wang, X.; Xu, Y. Performance enhancement for a GPS vector-tracking loop utilizing an adaptive iterated extended Kalman filter. Sensors 2014, 14, 23630–23649. [Google Scholar] [CrossRef] [PubMed]
- Alam, N.; Tian, J.; Khan, F.A. Theoretical Performance Analysis and Comparison of VDFLL and Traditional FLL Tracking Loops. In Proceedings of the 2018 European Navigation Conference (ENC), Gothenburg, Sweden, 14–17 May 2018; pp. 46–53. [Google Scholar]
- Henkel, P.; Giger, K.; Gunther, C. Multifrequency, multisatellite vector phase-locked loop for robust carrier tracking. IEEE J. Sel. Top. Signal Process. 2009, 3, 674–681. [Google Scholar] [CrossRef]
- So, H.; Lee, T.; Jeon, S.; Kim, C.; Kee, C.; Kim, T.; Lee, S. Implementation of a vector-based tracking loop receiver in a pseudolite navigation system. Sensors 2010, 10, 6324–6346. [Google Scholar] [CrossRef]
- Jin, T.; Wang, C.; Lu, X.; Ling, K.V.; Cong, L. Analysis of a federal Kalman filter-based tracking loop for GPS signals. GPS Solut. 2019, 23, 1–13. [Google Scholar] [CrossRef]
- Xie, F.; Sun, R.; Kang, G.; Qian, W.; Zhao, J.; Zhang, L. A jamming tolerant BeiDou combined B1/B2 vector tracking algorithm for ultra-tightly coupled GNSS/INS systems. Aerosp. Sci. Technol. 2017, 70, 265–276. [Google Scholar] [CrossRef]
- O’Driscoll, C.; Petovello, M.G.; Lachapelle, G. Choosing the coherent integration time for Kalman filter-based carrier-phase tracking of GNSS signals. GPS Solut. 2010, 15, 345–356. [Google Scholar] [CrossRef]
- Brown, R.G.; Hwang, P.Y. Introduction to Random Signals and Applied Kalman Filtering: With MATLAB Exercises; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Susi, M.; Andreotti, M.; Aquino, M.; Dodson, A. Tuning a Kalman filter carrier tracking algorithm in the presence of ionospheric scintillation. GPS Solut. 2017, 21, 1149–1160. [Google Scholar] [CrossRef]
- Tang, X.; Falco, G.; Falletti, E.; Presti, L.L. Theoretical analysis and tuning criteria of the Kalman filter-based tracking loop. GPS Solut. 2015, 19, 489–503. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RF () | 1575.42 MHz |
| IF () | 24 MHz |
| code frequency | 10.23 MHz |
| code length | 1023 chips |
| duty cycle of the pulse pattern (d) | 0.1 |
| Timeslot Period () | 0.1 ms |
| Frame Period () | 1 ms |
| Number of Timeslots in one Frame () | 10 |
| Number of Frames () | 200 |
| Super Frame Period () | 200 ms |
| RMSE | VTL | IUP-VTL | IUPPM-VTL |
|---|---|---|---|
| Doppler [Hz] | 0.7001 | 0.5218 | 0.5073 |
| Code Phase [m] | 0.2097 | 0.1124 | 0.0505 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tao, L.; Li, G.; Sun, J.; Zhu, B. An Optimized Vector Tracking Architecture for Pseudo-Random Pulsing CDMA Signals. Sensors 2021, 21, 4087. https://doi.org/10.3390/s21124087
Tao L, Li G, Sun J, Zhu B. An Optimized Vector Tracking Architecture for Pseudo-Random Pulsing CDMA Signals. Sensors. 2021; 21(12):4087. https://doi.org/10.3390/s21124087
Chicago/Turabian StyleTao, Lin, Guangchen Li, Junren Sun, and Bocheng Zhu. 2021. "An Optimized Vector Tracking Architecture for Pseudo-Random Pulsing CDMA Signals" Sensors 21, no. 12: 4087. https://doi.org/10.3390/s21124087
APA StyleTao, L., Li, G., Sun, J., & Zhu, B. (2021). An Optimized Vector Tracking Architecture for Pseudo-Random Pulsing CDMA Signals. Sensors, 21(12), 4087. https://doi.org/10.3390/s21124087