Dissolved Oxygen Forecasting in Aquaculture: A Hybrid Model Approach



Abstract
1. Introduction
2. Related Literature Review
3. Methodology
3.1. Proposed Model Design
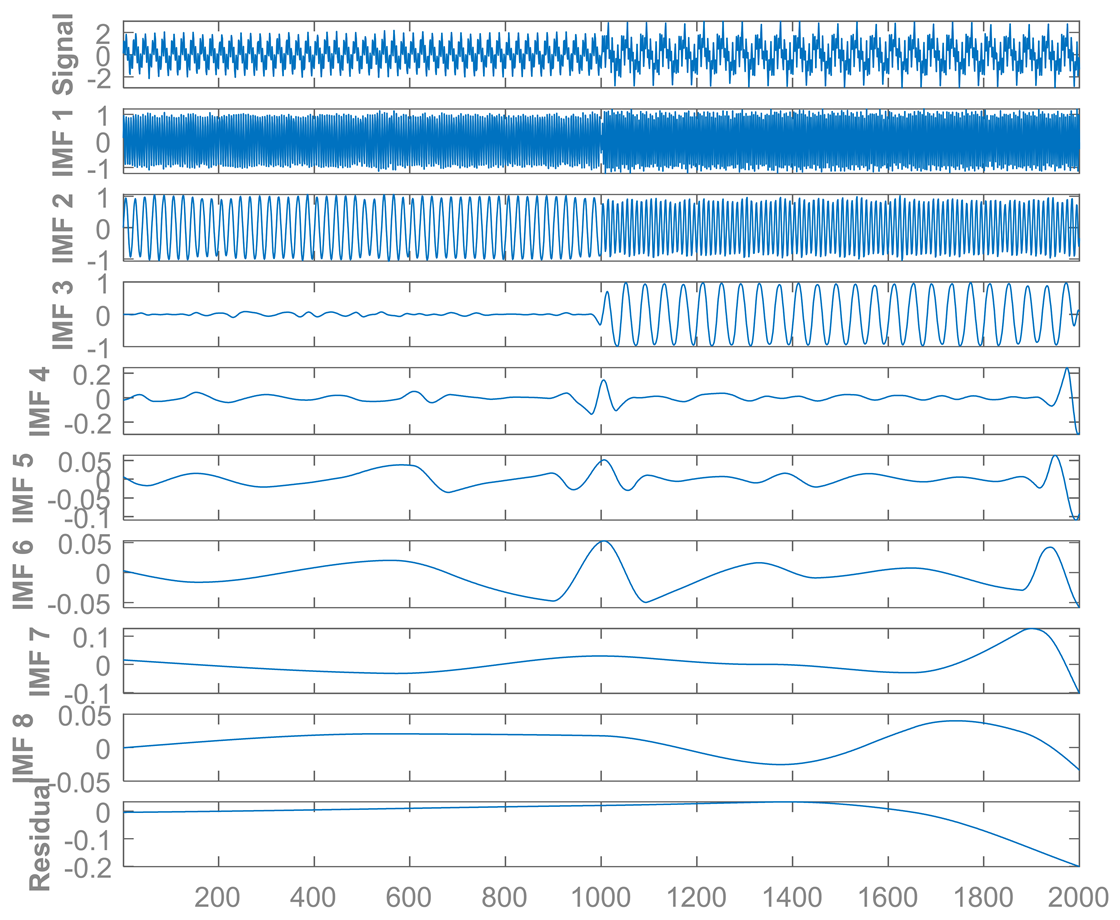
3.1.1. Ensemble Empirical Mode Decomposition
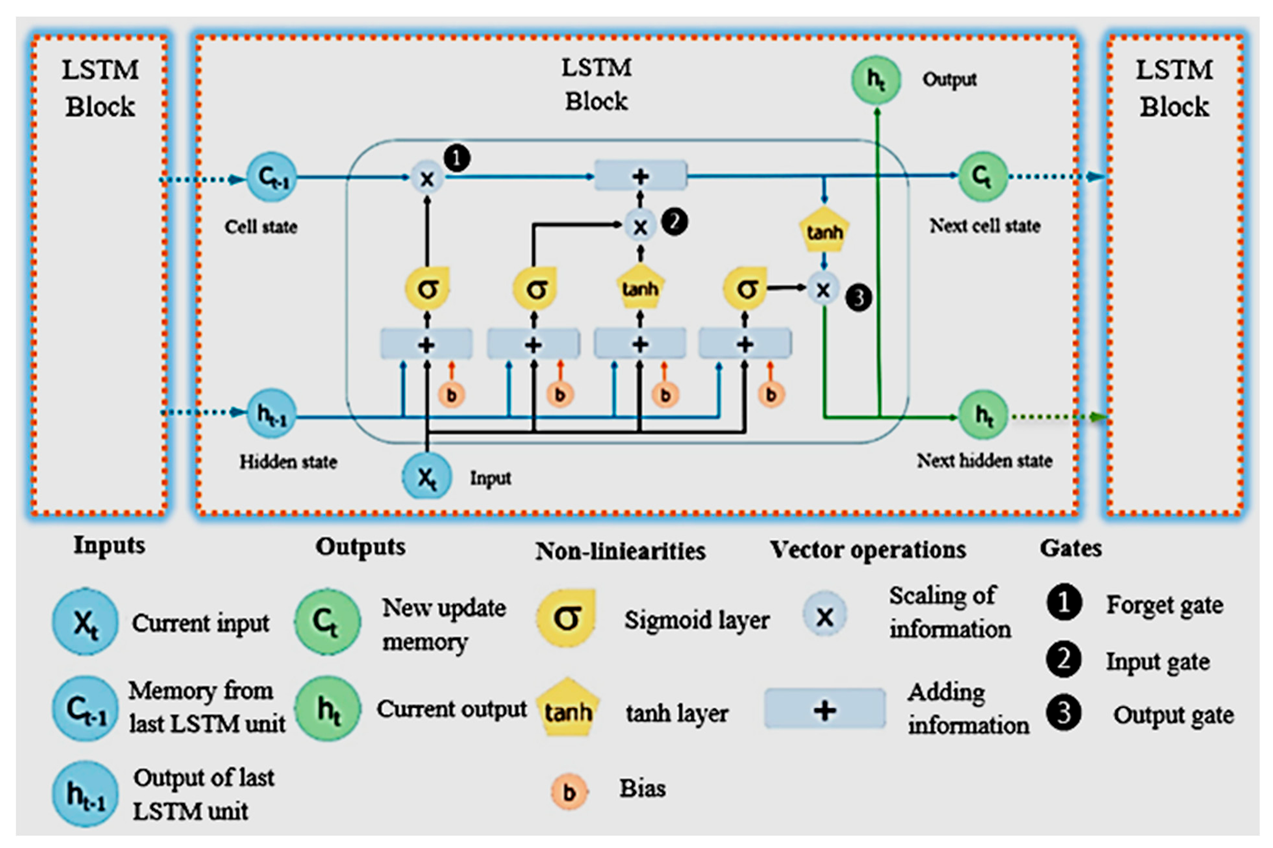
3.1.2. LSTM Neural Network
- (a)
- Forget gate equation:where is a vector with values from 0 to 1, with , , and representing the logistic sigmoid function, weight matrices and bias of the forget gate, respectively. From (3), the sigmoid layer determines if the new information is necessary to be used for update or unnecessary and ignored. Then, tanh function adds weight to each value that passed and decides their level of importance ranging from −1 to 1. Similar operations are repeated in input and output gates shown in (8) through (11).
- (b)
- Input gate equations:
- (c)
- Output gate equations:
- (d)
- Cell state equation:where and denote the weight matrixes, and represent the network’s bias vectors, of the input and output gates. Tanh represents the hyperbolic tangent function.
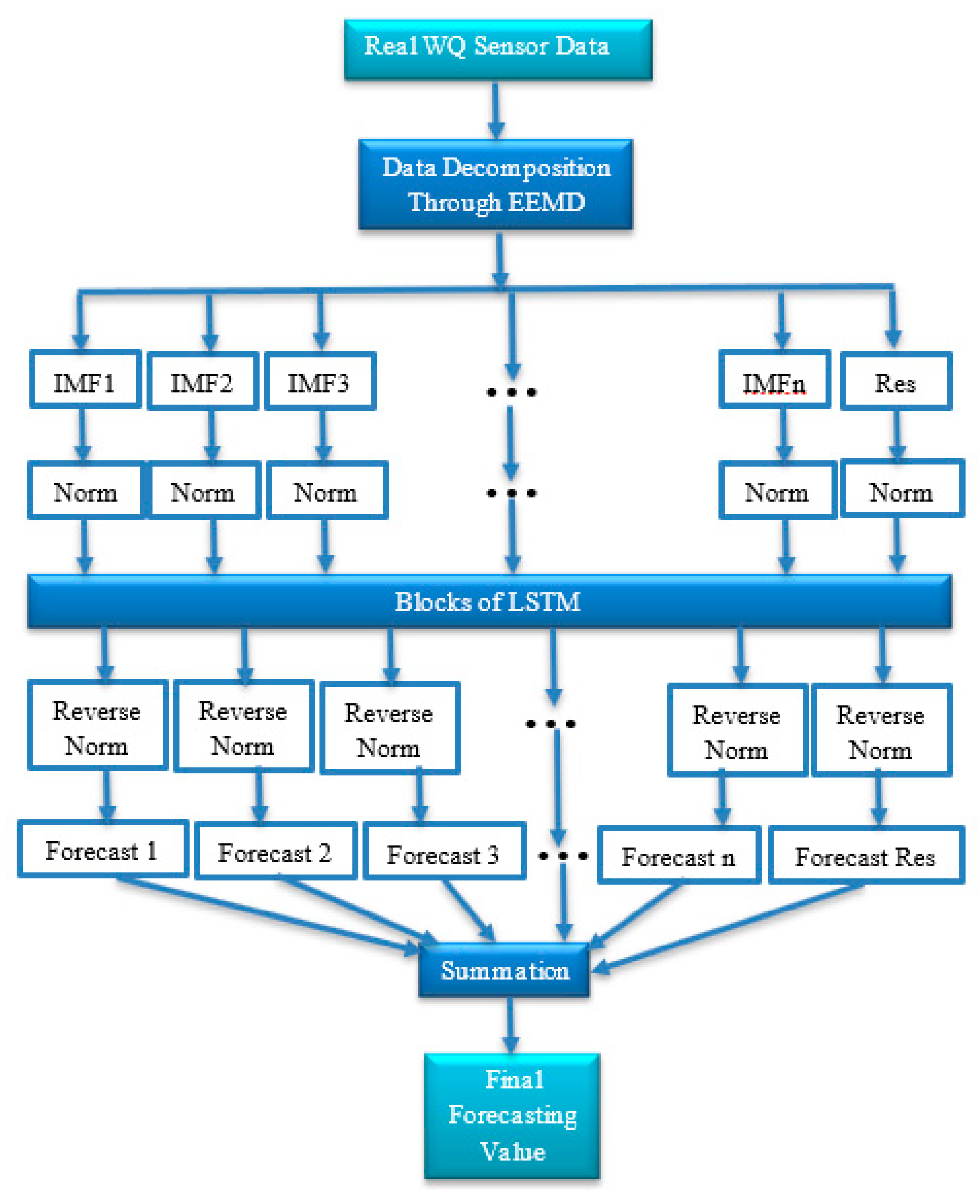
3.1.3. Novel Hybrid EEMD-Based LSTM model
4. Experiments and Results
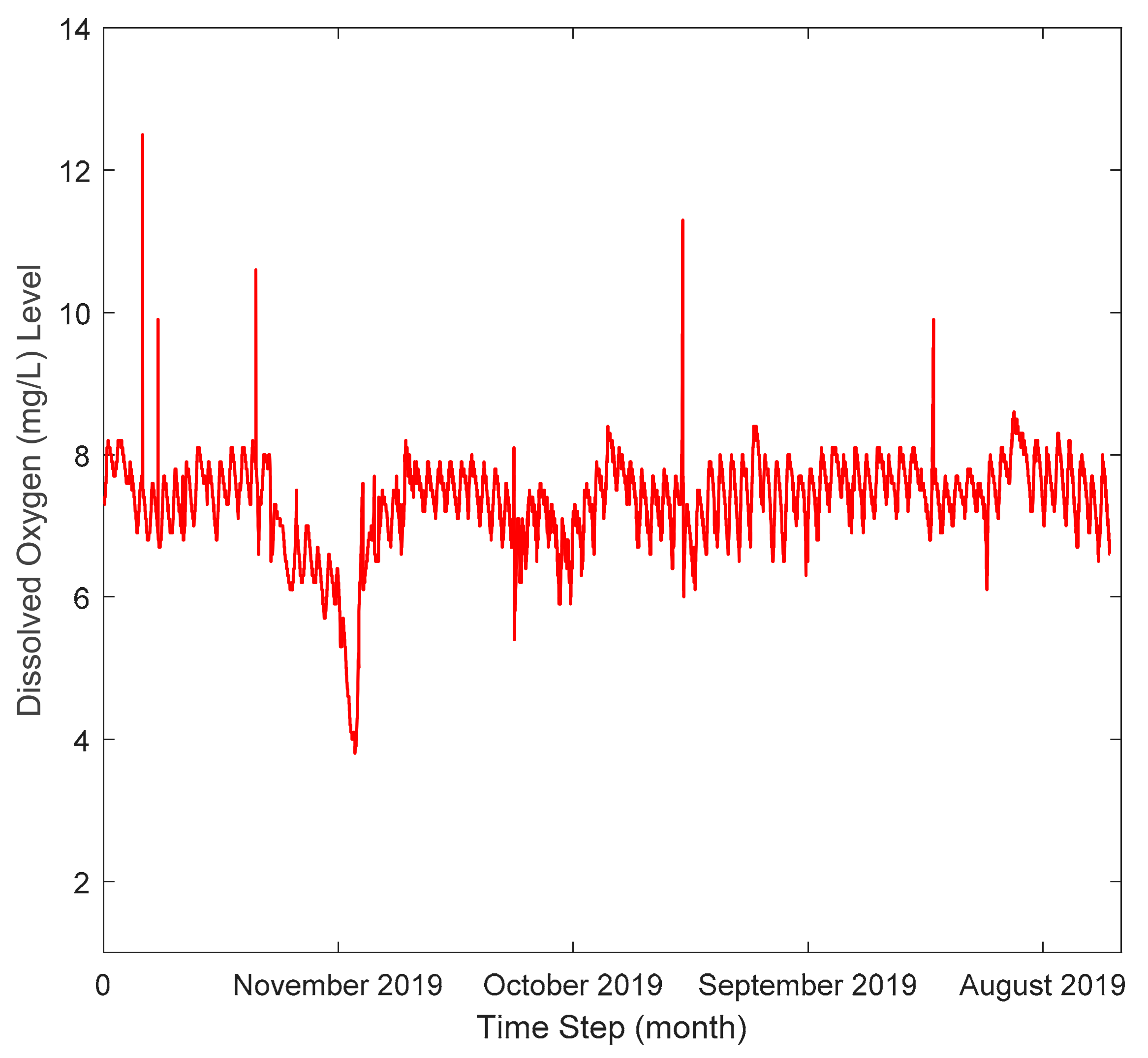
4.1. Water Quality Dataset Acquisition
4.2. Data Normalization
4.3. Problem Formulation
4.4. Performance Evaluation Metrics
5. Discussions
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Memon, A.R.; Kulsoom-Memon, S.; Memon, A.A.; Din-Memon, T. IoT Based Water Quality Monitoring System for Safe Drinking Water in Pakistan. In Proceedings of the 2020 3rd International Conference on Computing, Mathematics and Engineering Technologies (iCoMET), Sukkur, Pakistan, 29–30 January 2020; pp. 1–7. [Google Scholar]
- Parra, L.; Rocher, J.; Escrivá, J.; Lloret, J. Design and Development of Low-cost Smart Turbidity Sensor for Water Quality Monitoring in Fish Farms. Aquac. Eng. 2018, 81, 10–18. [Google Scholar] [CrossRef]
- Mohan, S.; Pavan, K.K. Waste load allocation using machine scheduling: Model application. Environ. Process. 2016, 3, 139–151. [Google Scholar] [CrossRef]
- Zhang, Y.F.; Thorburn, P.J.; Fitch, P. Multi-Task Temporal Convolutional Network for Predicting Water Quality Sensor Data. In International Conference on Neural Information Processing; Springer: Cham, Switzerland, 2019; pp. 122–130. [Google Scholar]
- Zhang, Y.-F.; Fitch, P.; Thorburn, P.J. Predicting the Trend of Dissolved Oxygen Based on the kPCA-RNN Model. Water 2020, 12, 585. [Google Scholar] [CrossRef]
- Parra, L.; Lloret, G.; Lloret, J.; Rodilla, M. Physical Sensors for Precision Aquaculture: A Review. IEEE Sens. J. 2018, 18, 3915–3923. [Google Scholar] [CrossRef]
- Parra, L.; Sendra, S.; García, L.; Lloret, J. Design and deployment of low-cost sensors for monitoring the water quality and fish behavior in aquaculture tanks during the feeding process. Sensors 2018, 18, 1–23. [Google Scholar] [CrossRef]
- Garcia, M.; Sendra, S.; Lloret, G.; Lloret, J. Monitoring and control sensor system for fish feeding in marine fish farms. IET Commun. 2011, 5, 1682–1690. [Google Scholar] [CrossRef]
- Parra, L.; Sendra, S.; Lloret, J.; Rodrigues, J.J. Design and deployment of a smart system for data gathering in aquaculture tanks using wireless sensor networks. Int. J. Commun. Syst. 2017, 30, 1–15. [Google Scholar] [CrossRef]
- Xiao, Z.; Peng, L.; Chen, Y.; Liu, H.; Wang, J.; Nie, Y. The Dissolved Oxygen Prediction Method Based on Neural Network. Complexity 2017, 2017, 1–6. [Google Scholar] [CrossRef]
- Wijayanti, K.N. Aquaculture water quality prediction using smooth SVM. Iptek J. Proc. 2015, 1, 342–345. [Google Scholar]
- Guo, P.; Liu, H.; Liu, S.; Xu, L. Numeric Prediction of Dissolved Oxygen Status Through Two-Stage Training for Classification-Driven Regression. In Proceedings of the 2019 International Conference on Machine Learning and Cybernetics (ICMLC), Kobe, Japan, 7–10 July 2019; pp. 1–6. [Google Scholar]
- Xue, H.; Wang, L.; Li, D. Design and Development of Dissolved Oxygen Real-Time Prediction and Early Warning System for Brocaded Carp Aquaculture. In International Conference on Computer and Computing Technologies in Agriculture; Springer: Berlin/Heidelberg, Germany, 2012; pp. 35–42. [Google Scholar]
- Liu, J.; Yu, C.; Hu, Z.; Zhao, Y.; Bai, Y.; Xie, M.; Luo, J. Accurate Prediction Scheme of Water Quality in Smart Mariculture with Deep Bi-S-SRU Learning Network. IEEE Access 2020, 8, 24784–24798. [Google Scholar] [CrossRef]
- Yan, J.; Gao, Y.; Yu, Y.; Xu, H.; Xu, Z. A Prediction Model Based on Deep Belief Network and Least Squares SVR Applied to Cross-Section Water Quality. Water 2020, 12, 1929. [Google Scholar] [CrossRef]
- Liu, S.; Tai, H.; Ding, Q.; Li, D.; Xu, L.; Wei, Y. A hybrid approach of support vector regression with genetic algorithm optimization for aquaculture water quality prediction. Math. Comp. Mod. 2013, 58, 458–465. [Google Scholar] [CrossRef]
- Li, C.; Li, Z.; Wu, J.; Zhu, L.; Yue, J. A hybrid model for dissolved oxygen prediction in aquaculture based on multi-scale features. Inf. Proc. Agric. 2018, 5, 11–20. [Google Scholar] [CrossRef]
- Junsheng, C.; Kang, Z.; Yu, Y.; De-jie, Y.U. Comparison between the methods of local mean decomposition and empirical mode decomposition. J. Vib. Shock 2009, 28, 13–16. [Google Scholar]
- Beltrán-Castro, J.; Valencia-Aguirre, J.; Orozco-Alzate, M.; Castellanos-Domínguez, G.; Travieso-González, C.M. Rainfall Forecasting Based on Ensemble Empirical Mode Decomposition and Neural Networks. In International Work-Conference on Artificial Neural Networks; Springer: Berlin/Heidelberg, Germany, 2013; pp. 471–480. [Google Scholar]
- Tian, Z. Approach for Short-Term Traffic Flow Prediction Based on Empirical Mode Decomposition and Combination Model Fusion. IEEE Tran. Int. Trans. Syst. 2020. [Google Scholar] [CrossRef]
- Chen, X.; Lu, J.; Zhao, J.; Qu, Z.; Yang, Y.; Xian, J. Traffic Flow Prediction at Varied Time Scales via Ensemble Empirical Mode Decomposition and Artificial Neural Network. Sustainability 2020, 12, 3678. [Google Scholar] [CrossRef]
- Pholsena, K.; Pan, L.; Zheng, Z. Mode decomposition based deep learning model for multi-section traffic prediction. World Wide Web 2020, 23, 2513–2527. [Google Scholar] [CrossRef]
- Zhang, G.; Liu, H.; Zhang, J.; Yan, Y.; Zhang, L.; WU, C. Wind power prediction based on variational mode decomposition multi-frequency combinations. J. Mod. Power Syst. Clean Energy 2019, 7, 281–288. [Google Scholar] [CrossRef]
- Liu, K.; Zhang, Y.; Qin, L. A novel combined forecasting model for short-term wind power based on ensemble empirical mode decomposition and optimal virtual prediction. J. Renew. Sustain. Energy 2016, 8, 1–22. [Google Scholar] [CrossRef]
- Liu, S.; Xu, L.; Li, D. Multi-scale prediction of water temperature using empirical mode decomposition with back-propagation neural networks. Comp. Elec. Eng. 2016, 49, 1–8. [Google Scholar] [CrossRef]
- Liu, S.; Yan, M.; Tai, H.; Xu, L.; Li, D. Prediction of Dissolved Oxygen Content in Aquaculture of Hyriopsis Cumingii Using Elman Neural Network. In International Conference on Computer and Computing Technologies in Agriculture; Springer: Berlin/Heidelberg, Germany, 2011; pp. 508–518. [Google Scholar]
- Li, Z.; Peng, F.; Niu, B.; Li, G.; Wu, J.; Miao, Z. Water Quality Prediction Model Combining Sparse Auto-encoder and LSTM Network. IFAC-PapersOnLine 2018, 51, 831–836. [Google Scholar] [CrossRef]
- Huang, N.E.; Zheng, S.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Torres, M.E.; Colominas, M.A.; Schlotthauer, G.; Flandrin, P. A Complete Ensemble Empirical Mode Decomposition with Adaptive Noise. In Proceedings of the 2011 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Prague, Czech Republic, 22–27 May 2011; pp. 4144–4147. [Google Scholar]
- Wu, Z.H.; Huang, N.E. Ensemble empirical mode decomposition: A noise assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Wang, H.; Raj, B. On the origin of deep learning. arXiv 2017, arXiv:1702.07800. [Google Scholar]
- Shao, X.; Kim, C.S. Multi-Step Short-Term Power Consumption Forecasting Using Multi-Channel LSTM with Time Location Considering Customer Behavior. IEEE Access 2020, 8, 125263–125273. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
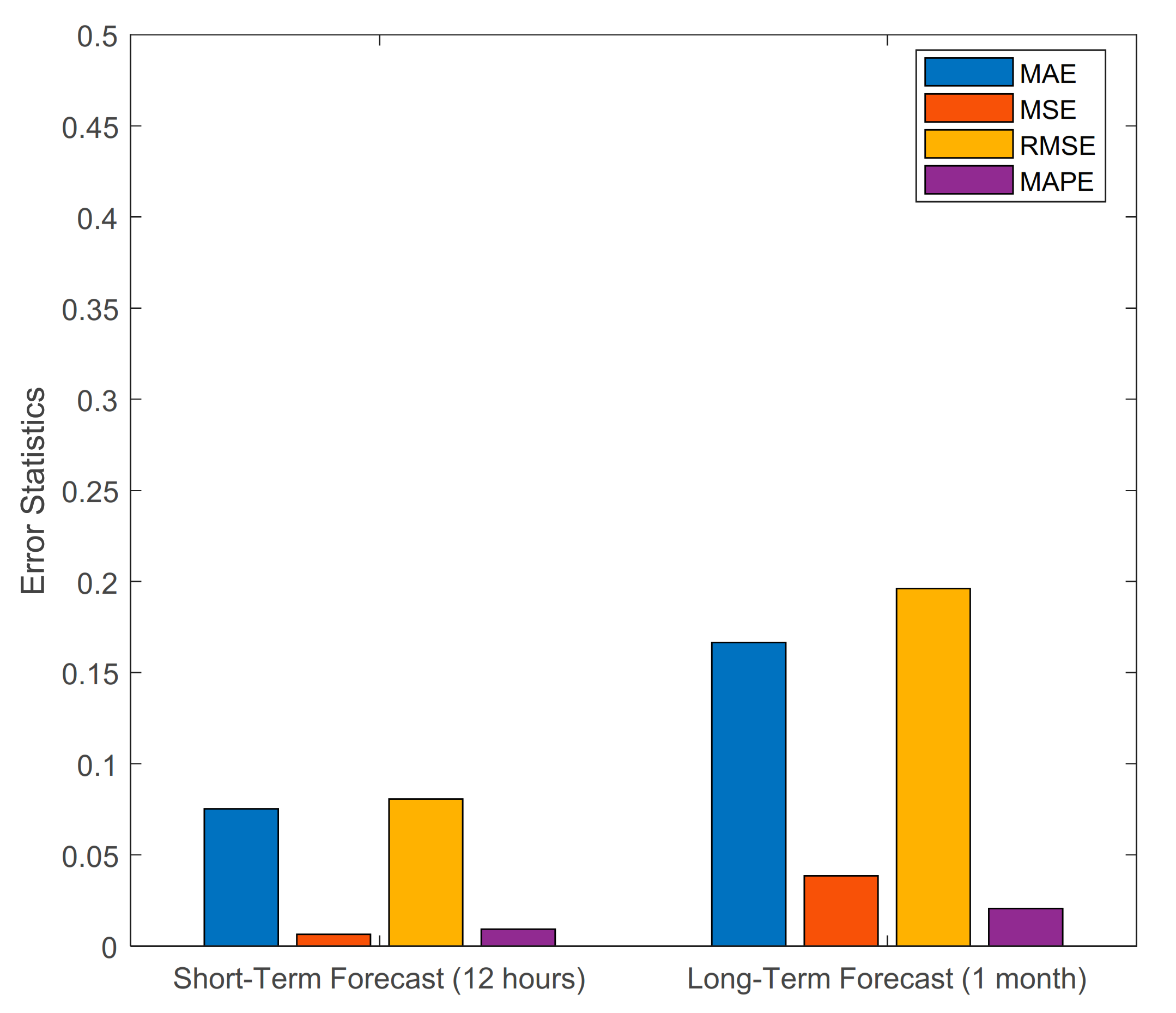
| Error Statistics | 12 Hour Forecast | 1 Month Forecast |
|---|---|---|
| MAE | 0.0753 | 0.1666 |
| MSE | 0.0065 | 0.0385 |
| RMSE | 0.0807 | 0.1962 |
| MAPE | 0.0093 | 0.0206 |
| Error Statistics | LSTM NN | BPNN | SAE-LSTM NN | SAE-BPNN | EEMD-LSTM NN |
|---|---|---|---|---|---|
| Run Time(s) | 23.2 | 3.6 | 29.6 | 9.1 | 2.37 |
| MAE | 0.1590 | 0.4530 | 0.1260 | 0.4060 | 0.0753 |
| MSE | 0.0398 | 0.3013 | 0.0242 | 0.2428 | 0.0065 |
| RMSE | 0.1995 | 0.5489 | 0.1556 | 0.4927 | 0.0807 |
| MAPE | 0.0160 | 0.0450 | 0.0130 | 0.0419 | 0.0093 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Eze, E.; Ajmal, T. Dissolved Oxygen Forecasting in Aquaculture: A Hybrid Model Approach. Appl. Sci. 2020, 10, 7079. https://doi.org/10.3390/app10207079
Eze E, Ajmal T. Dissolved Oxygen Forecasting in Aquaculture: A Hybrid Model Approach. Applied Sciences. 2020; 10(20):7079. https://doi.org/10.3390/app10207079
Chicago/Turabian StyleEze, Elias, and Tahmina Ajmal. 2020. "Dissolved Oxygen Forecasting in Aquaculture: A Hybrid Model Approach" Applied Sciences 10, no. 20: 7079. https://doi.org/10.3390/app10207079
APA StyleEze, E., & Ajmal, T. (2020). Dissolved Oxygen Forecasting in Aquaculture: A Hybrid Model Approach. Applied Sciences, 10(20), 7079. https://doi.org/10.3390/app10207079