Characteristics Analysis and Fuzzy Fractional-Order PID Parameter Optimization for Primary Frequency Modulation of a Pumped Storage Unit Based on a Multi-Objective Gravitational Search Algorithm


Abstract
:1. Introduction
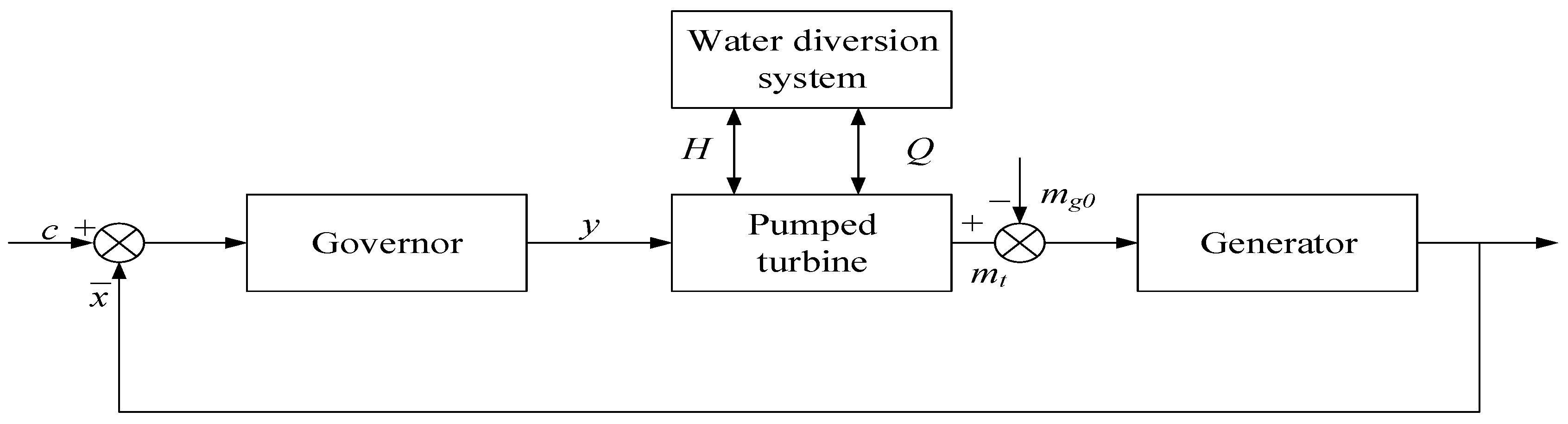
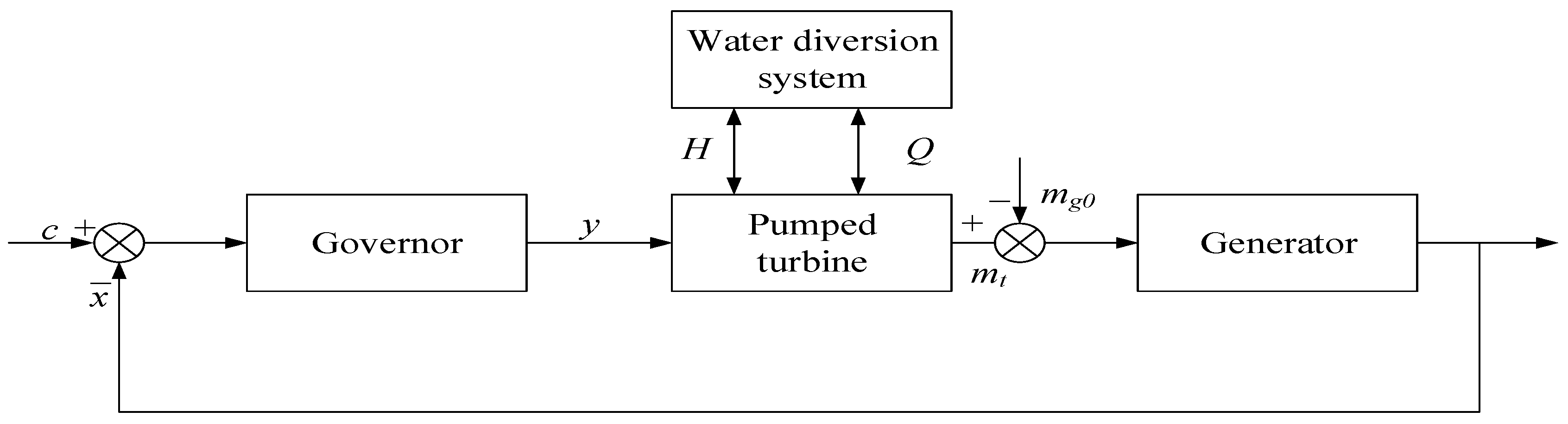
2. Model of the Pumped Storage Unit Regulating System
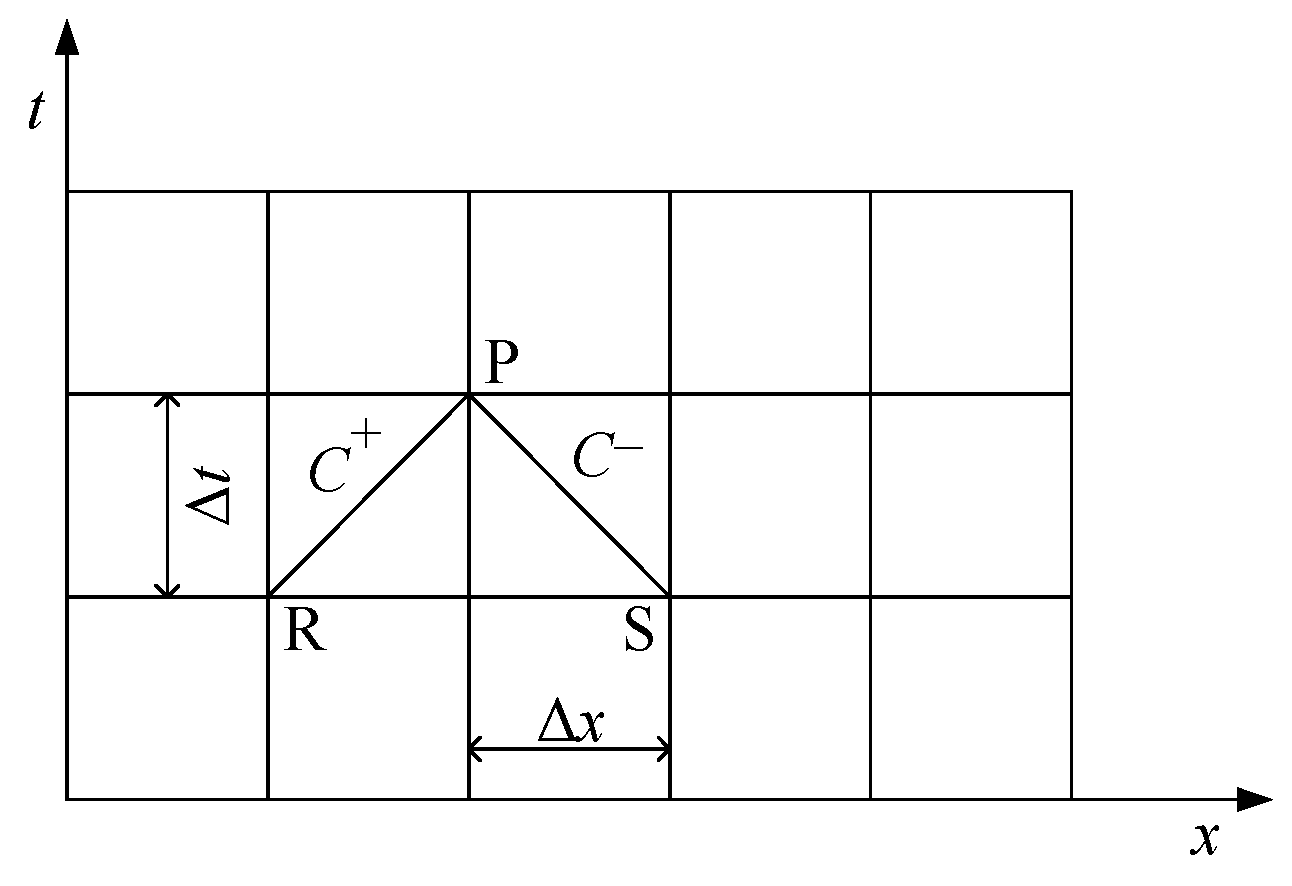
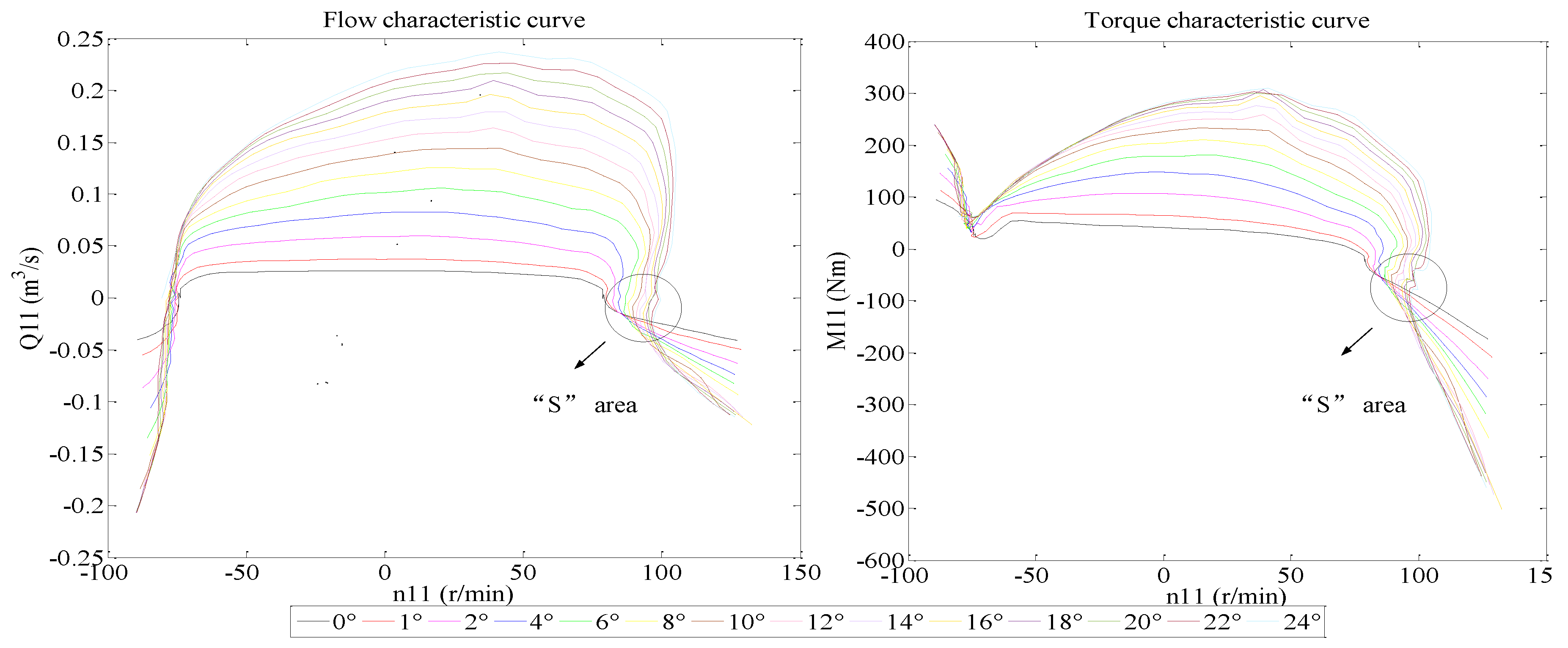
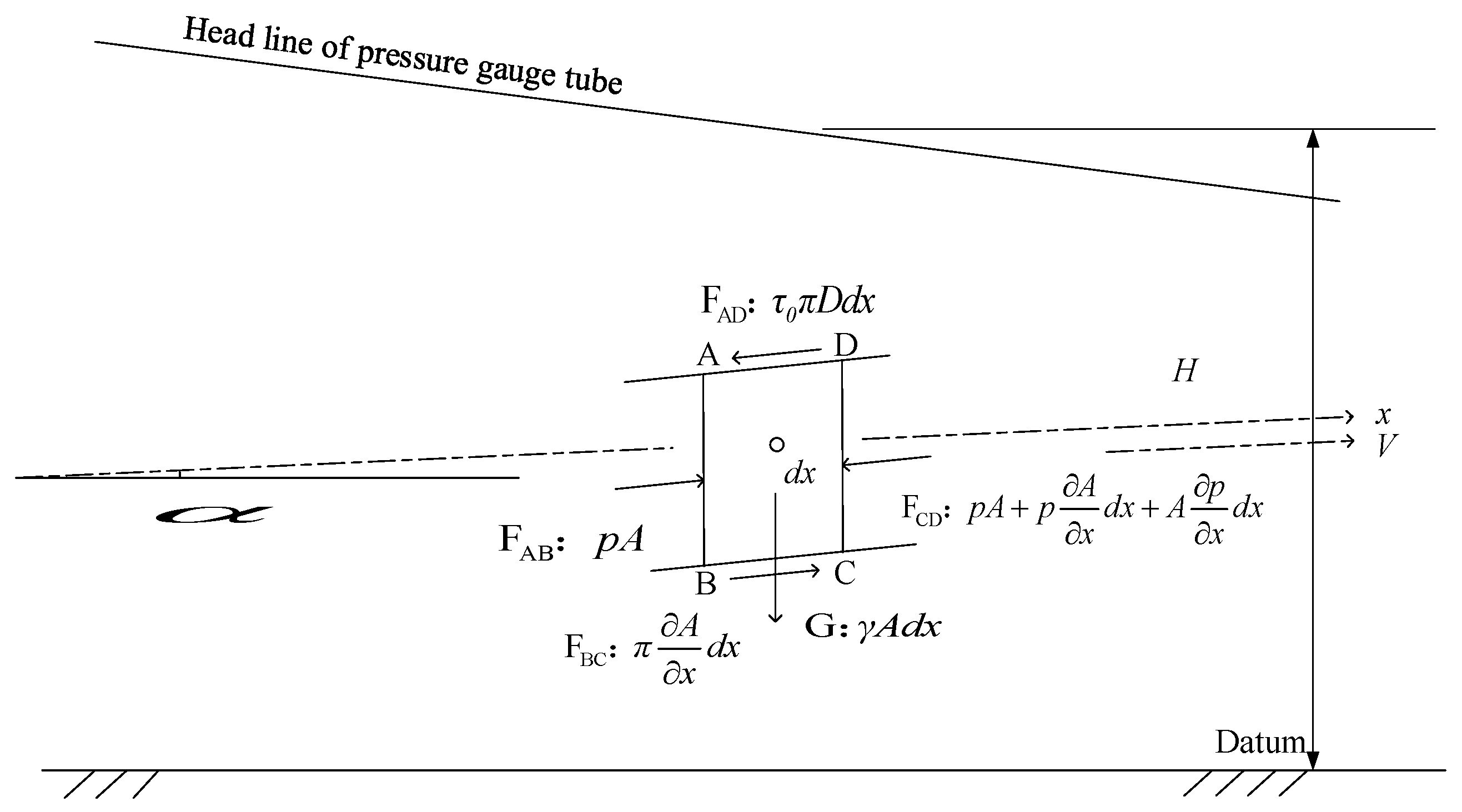
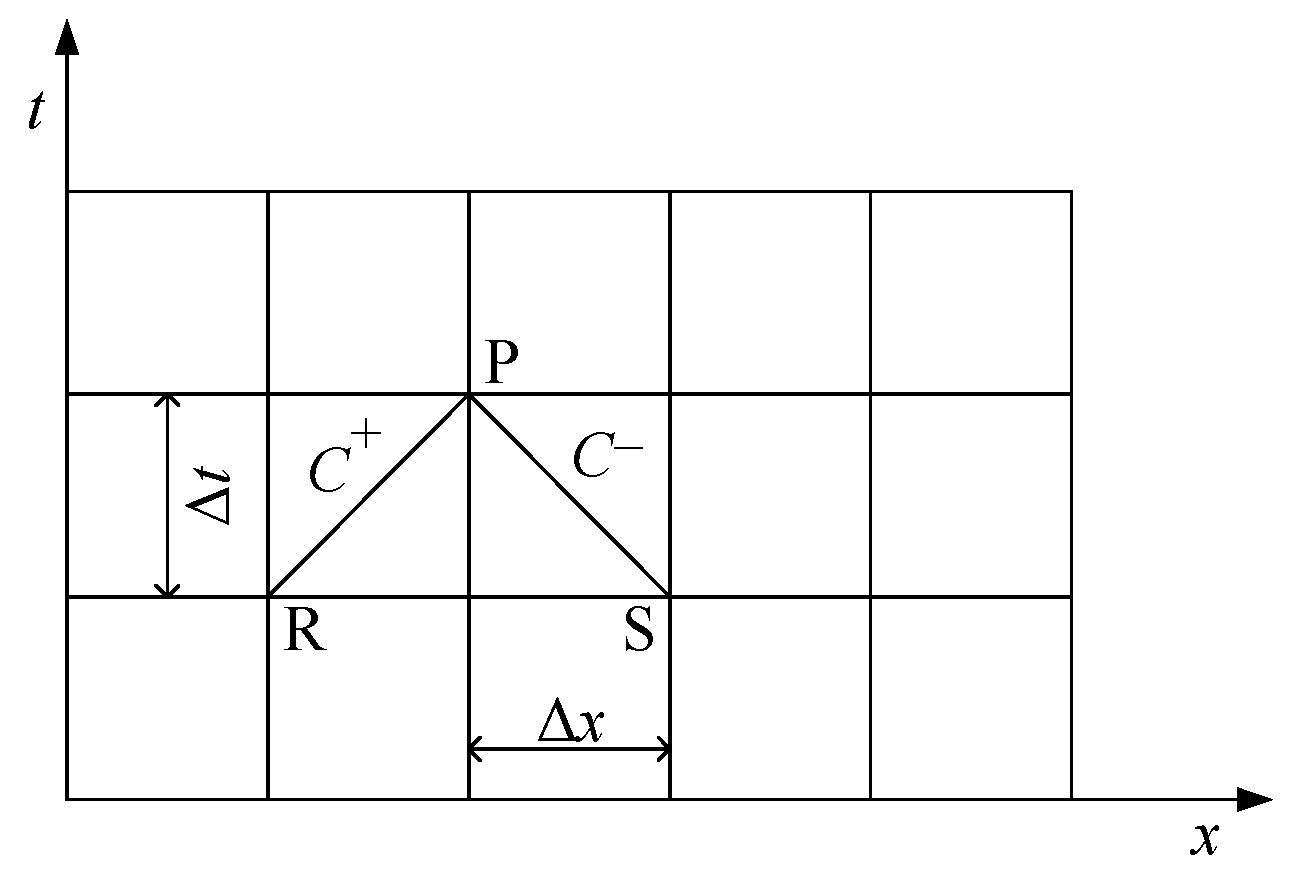
2.1. The Model of the Water Diversion System
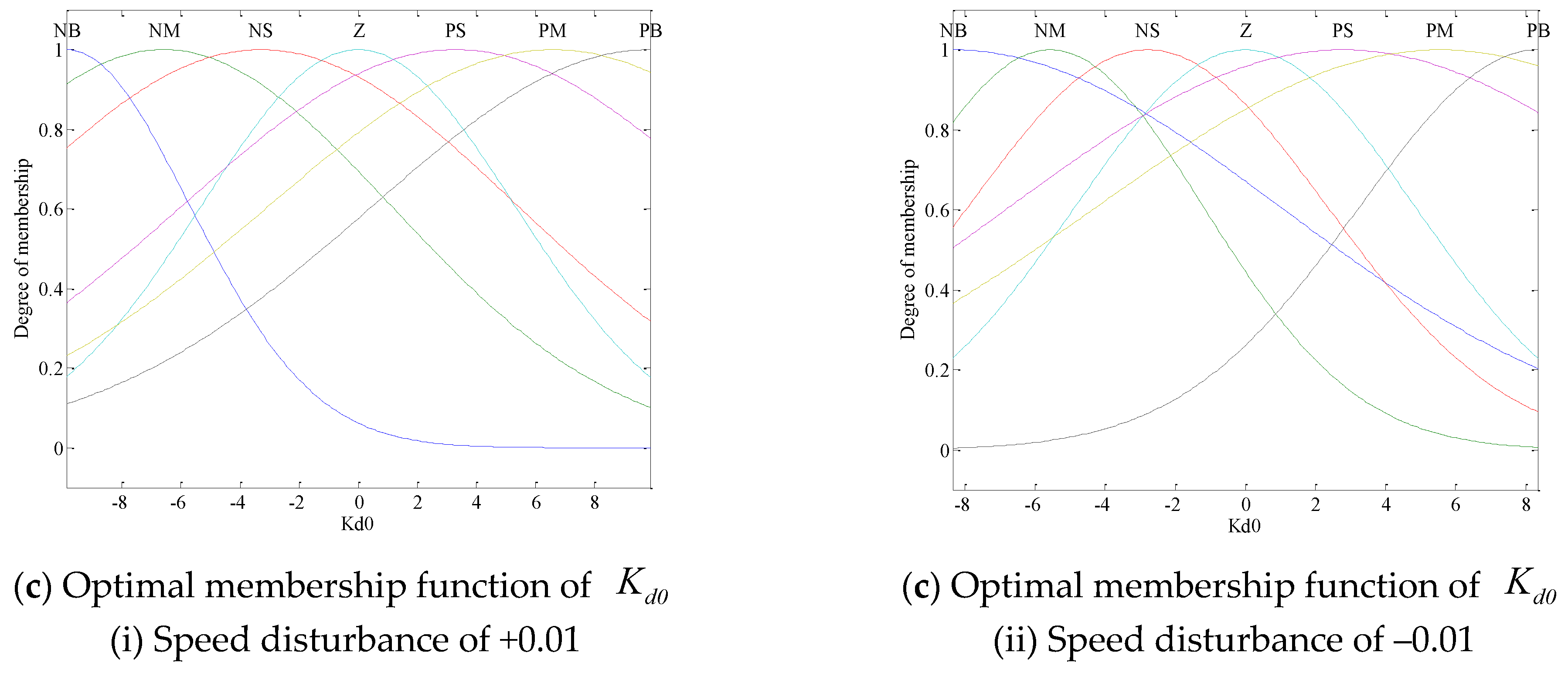
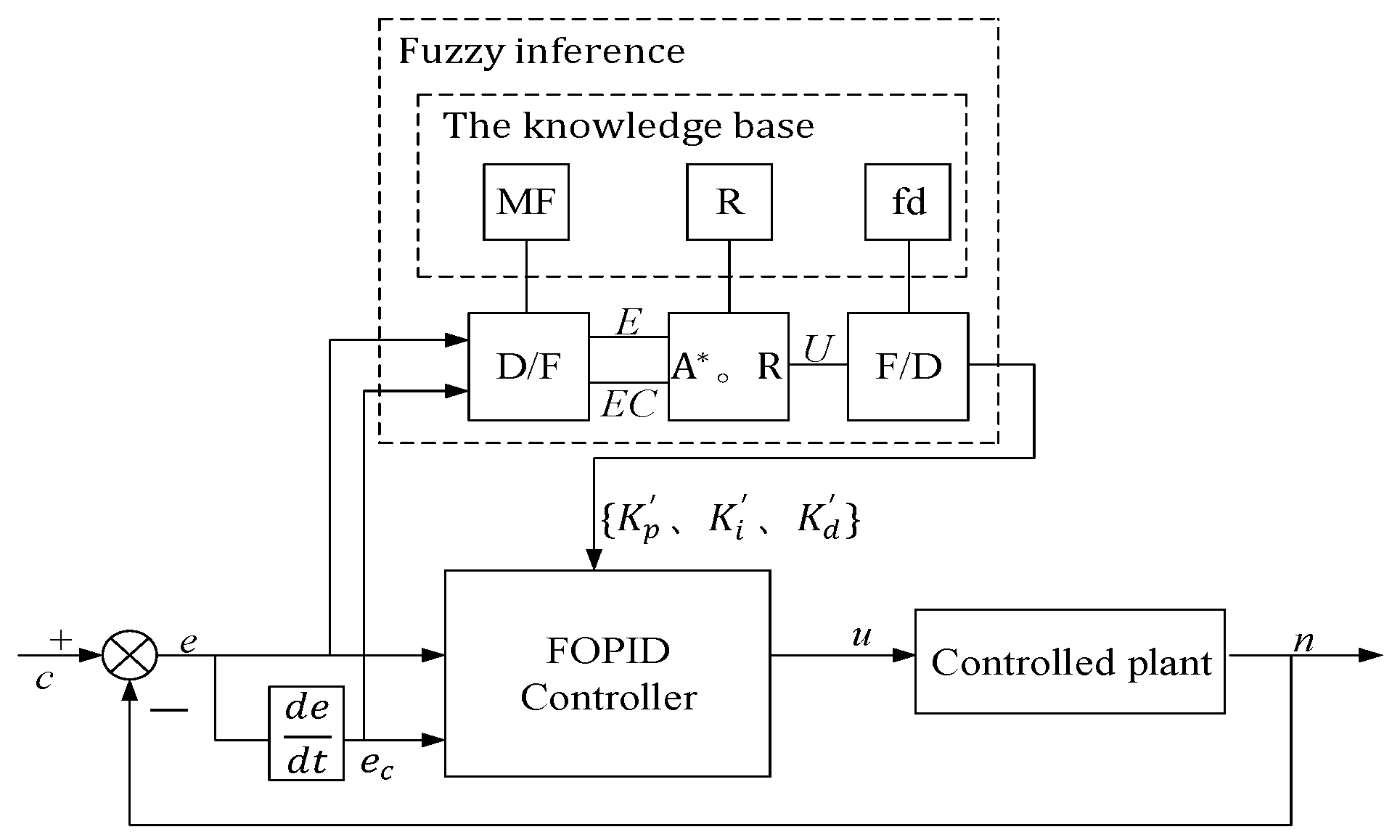
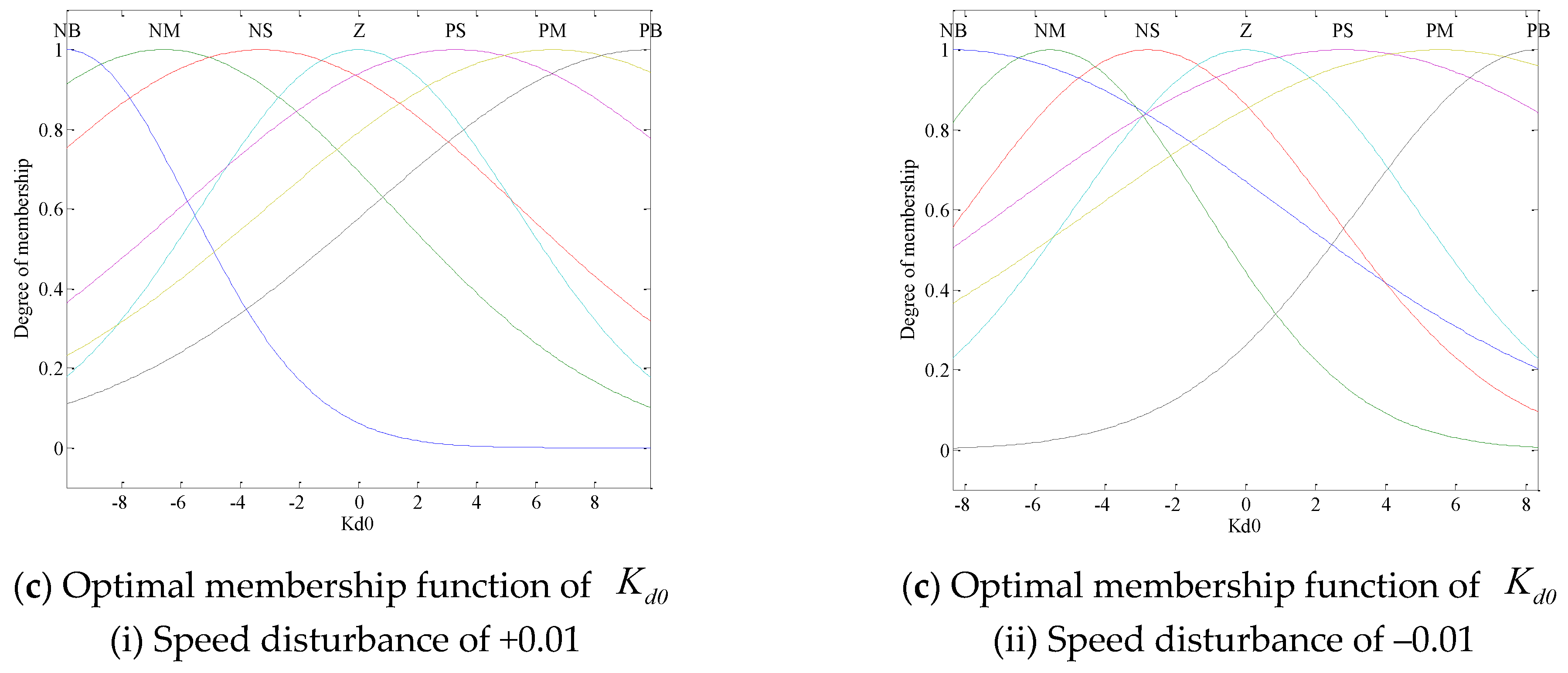
2.2. The Model of Fuzzy Fractional-Order PID Controller
2.2.1. FOPID Controller
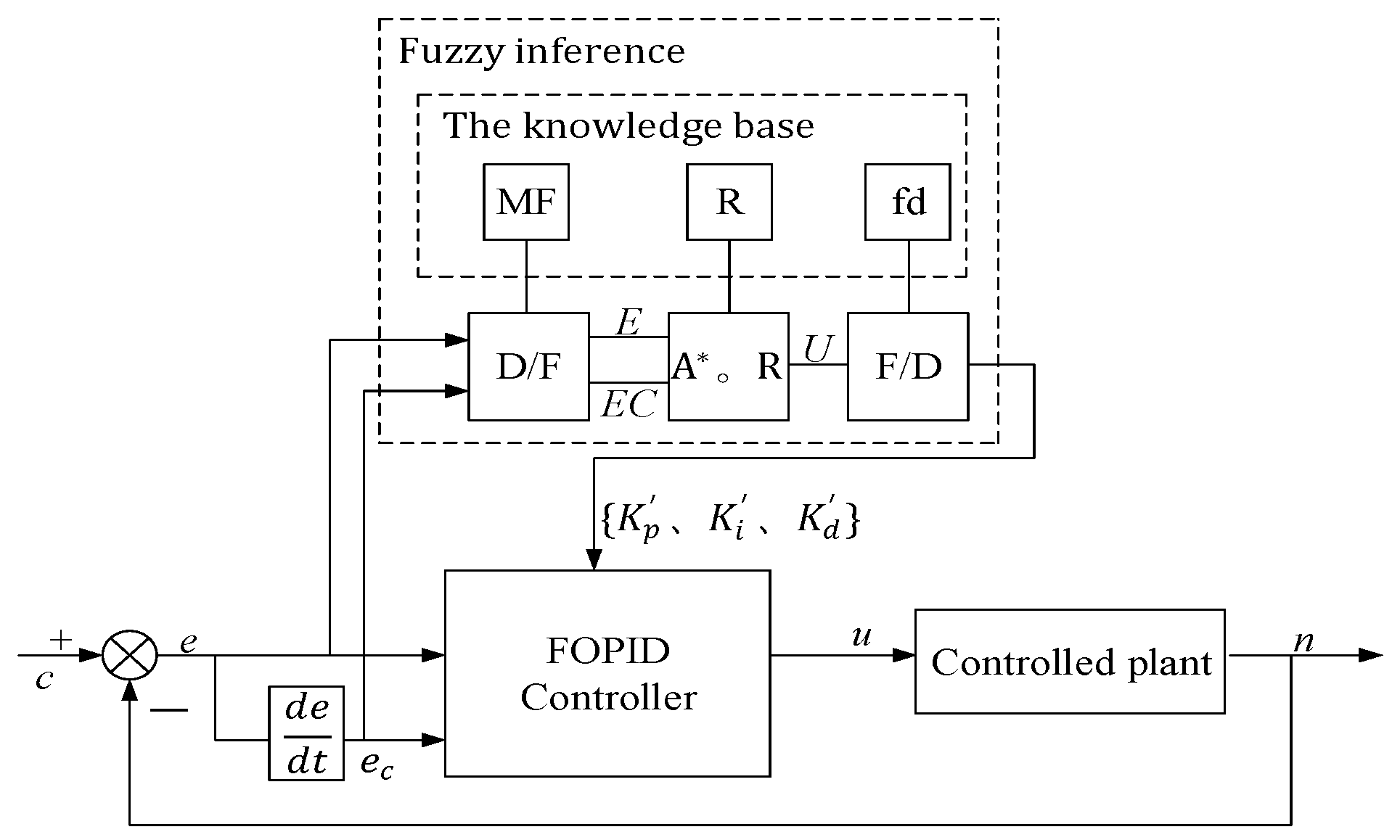
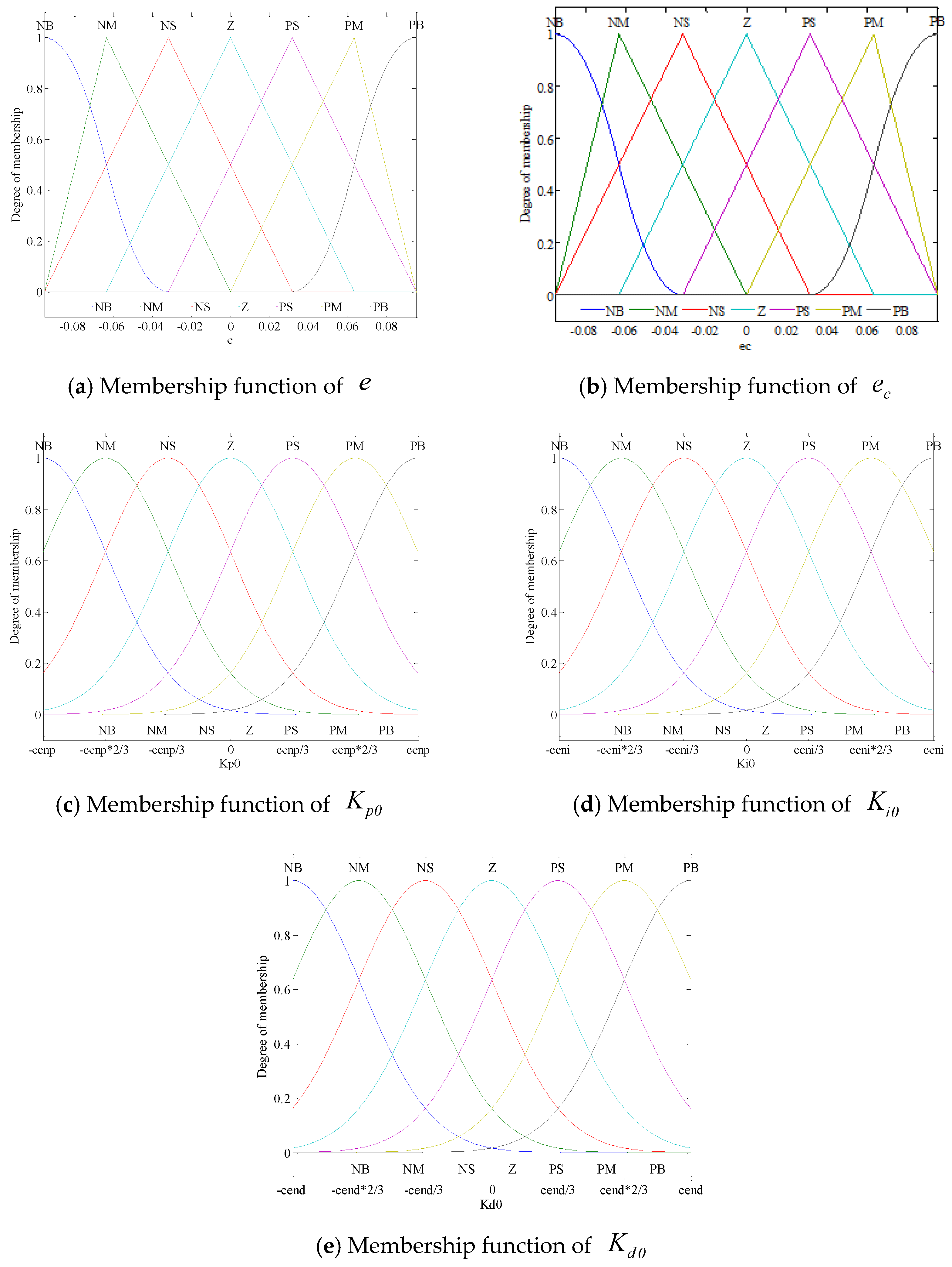
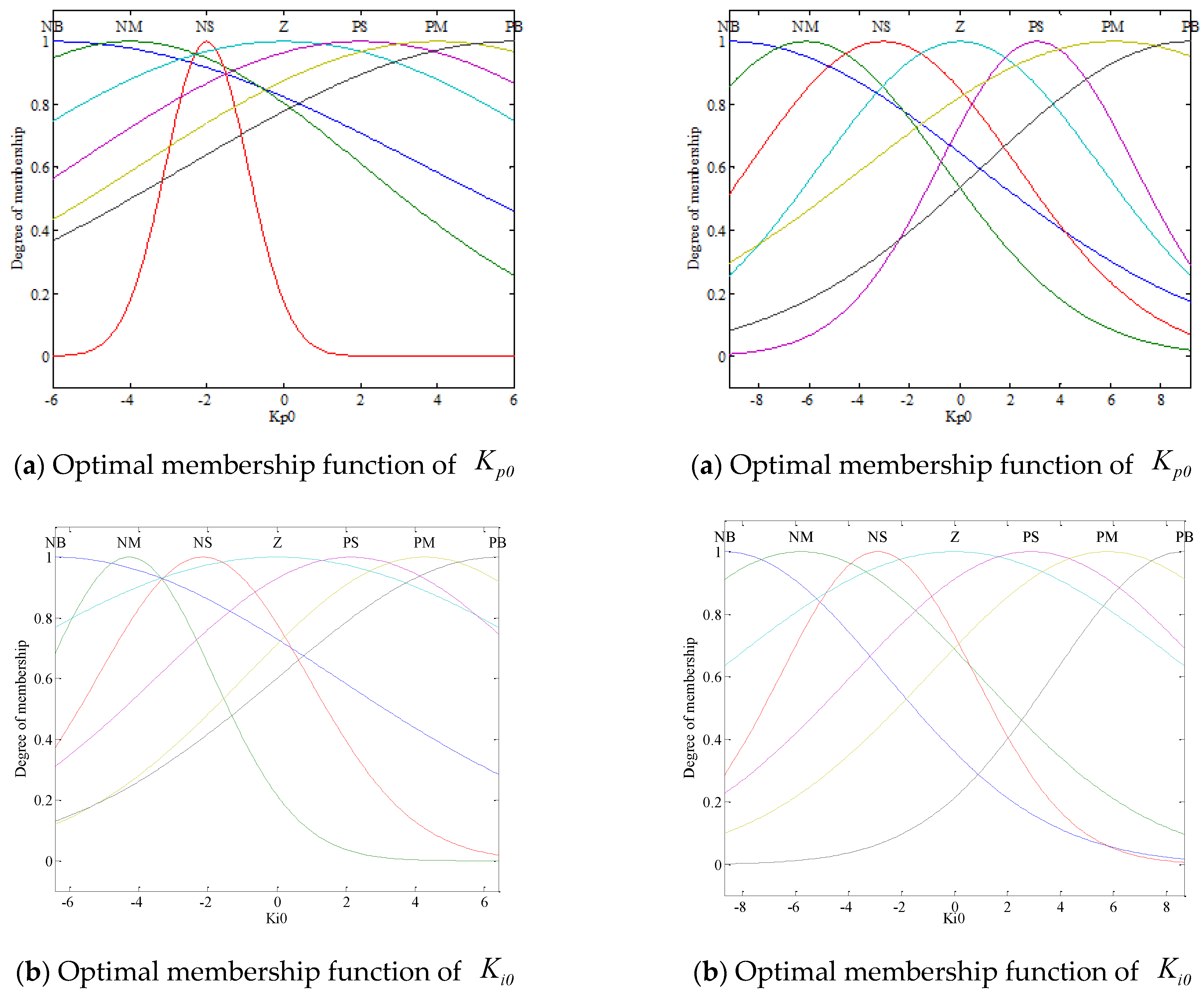
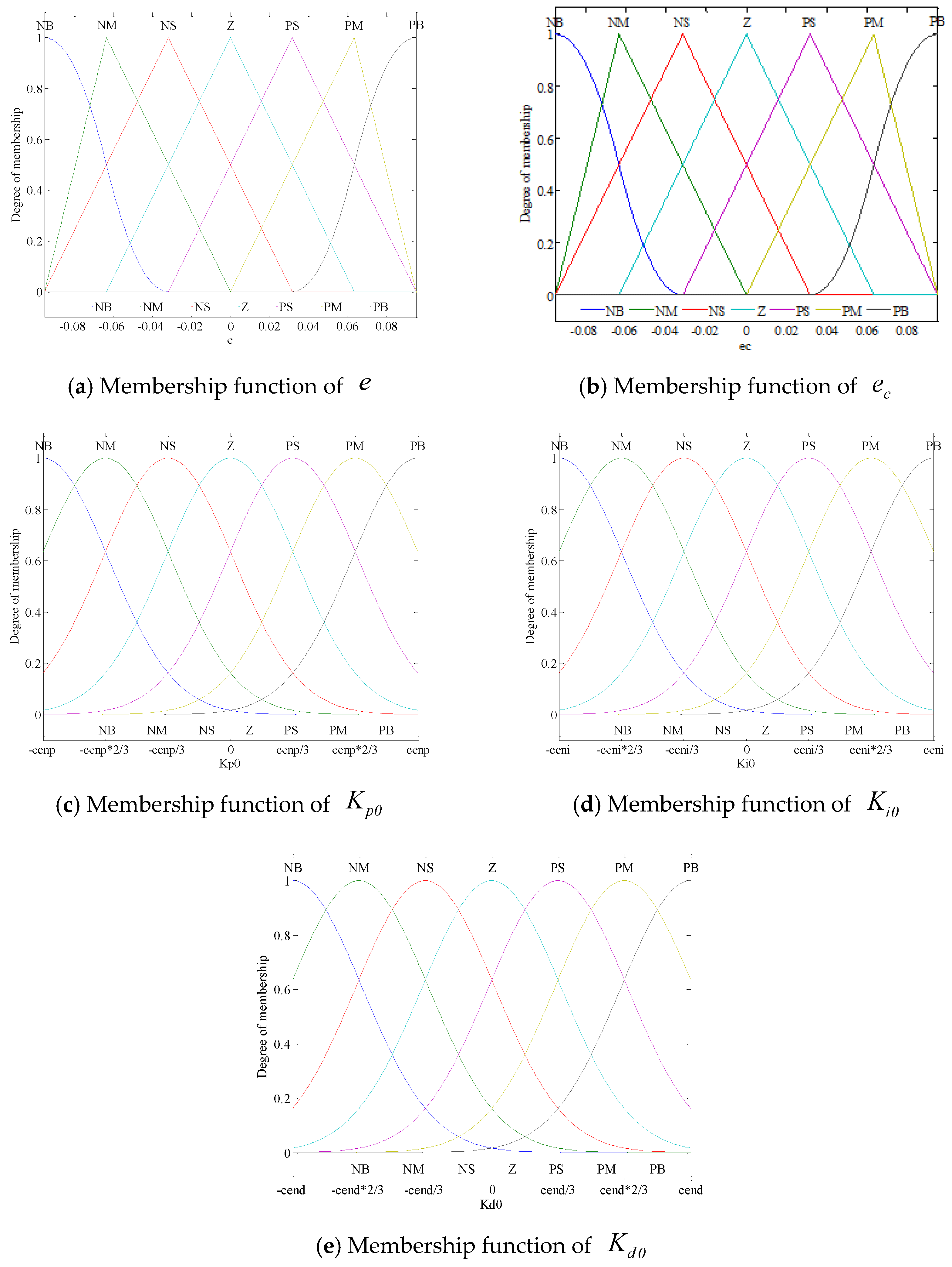
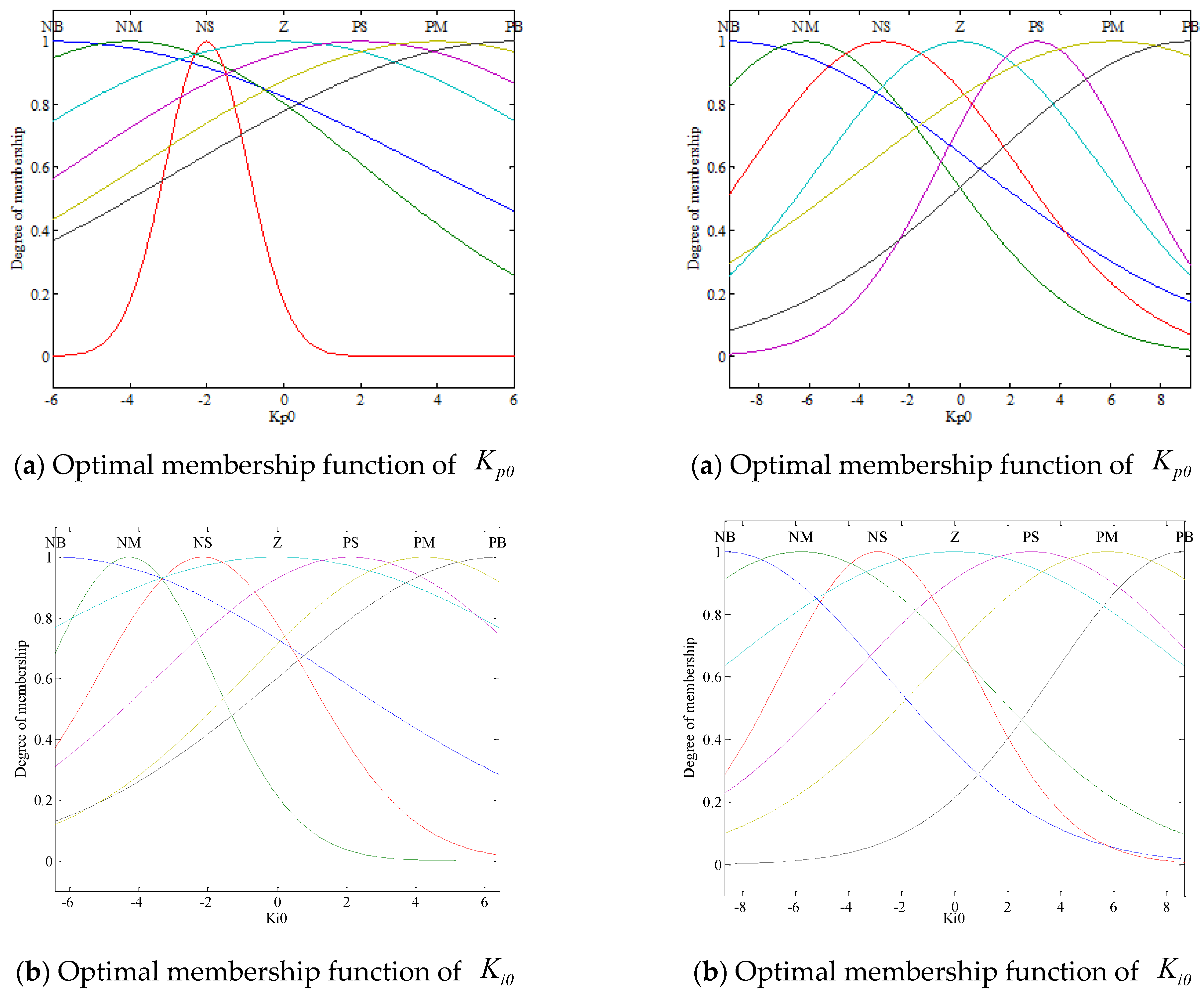
2.2.2. FFOPID Controller
2.3. The Model of Servo Mechanism
2.4. Model of the Pumped Storage Unit
2.5. The Model of Generator and Loads Unit
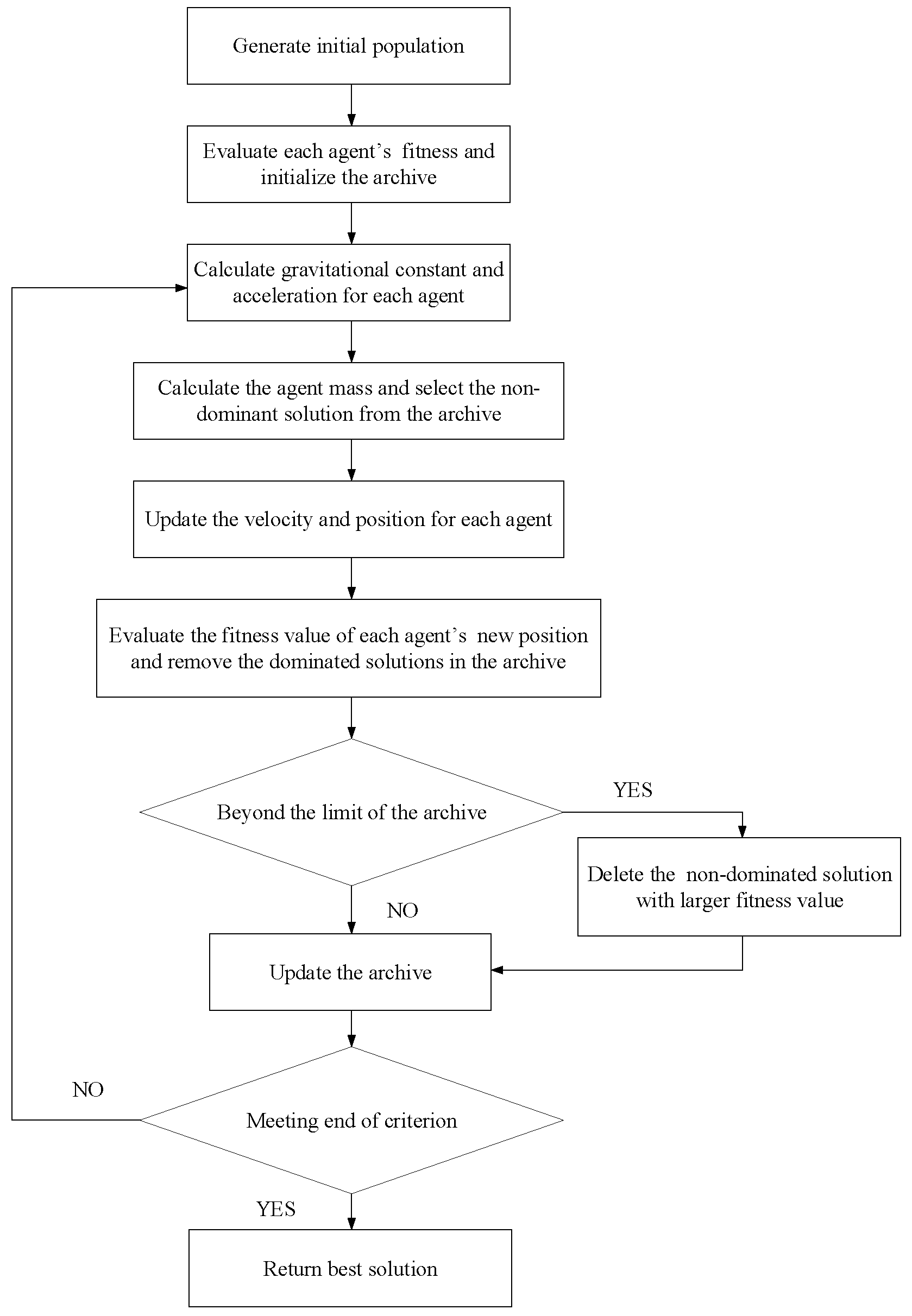
3. Multi-Objective Gravitational Search Algorithm (MOGSA)
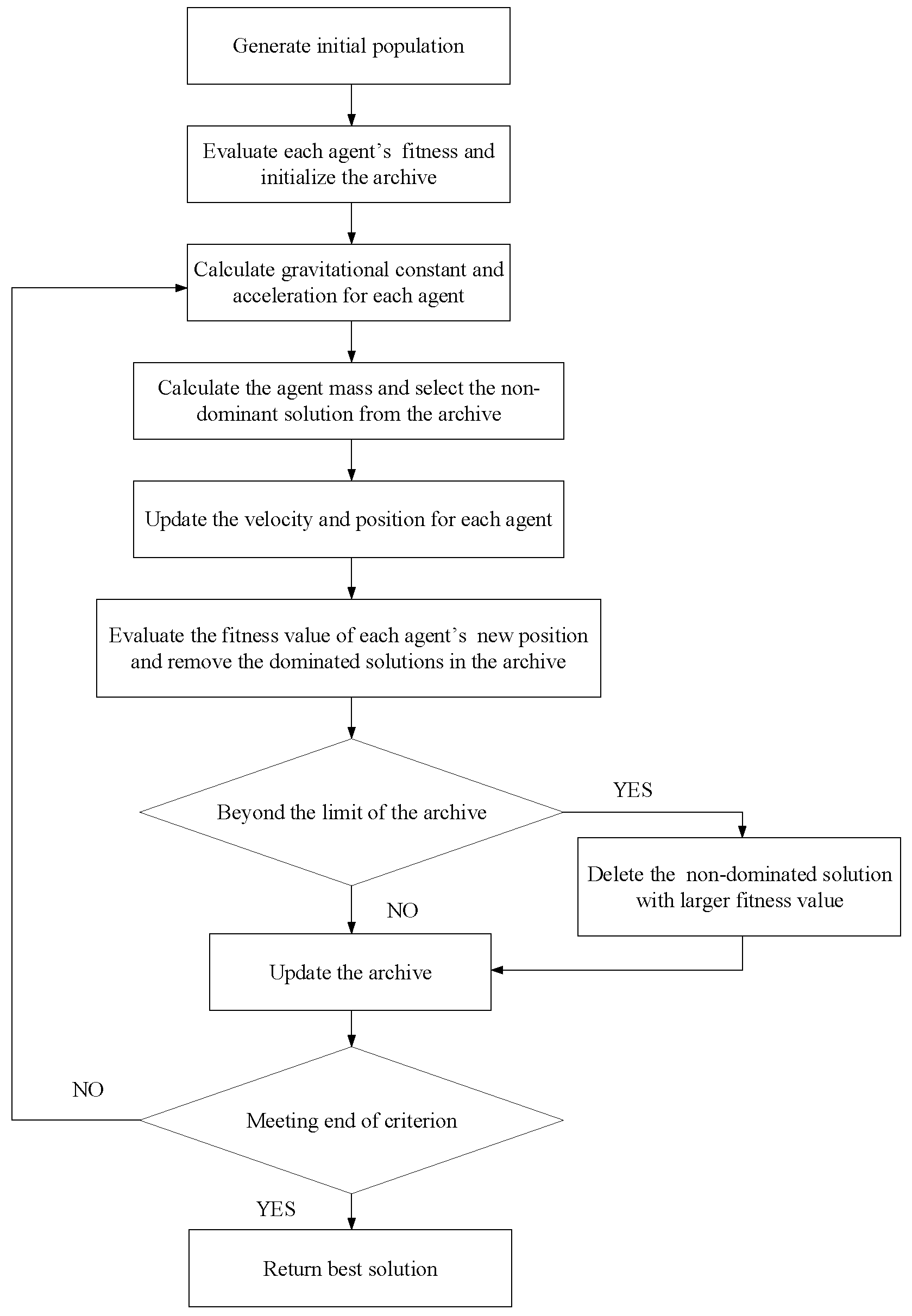
3.1. MOGSA
3.1.1. Gravitational Search Algorithm (GSA)
3.1.2. Multi-Objective Optimization
3.2. Objective Functions
3.3. Optimization Variables
4. Experiences and Results Analysis
4.1. Model Parameters
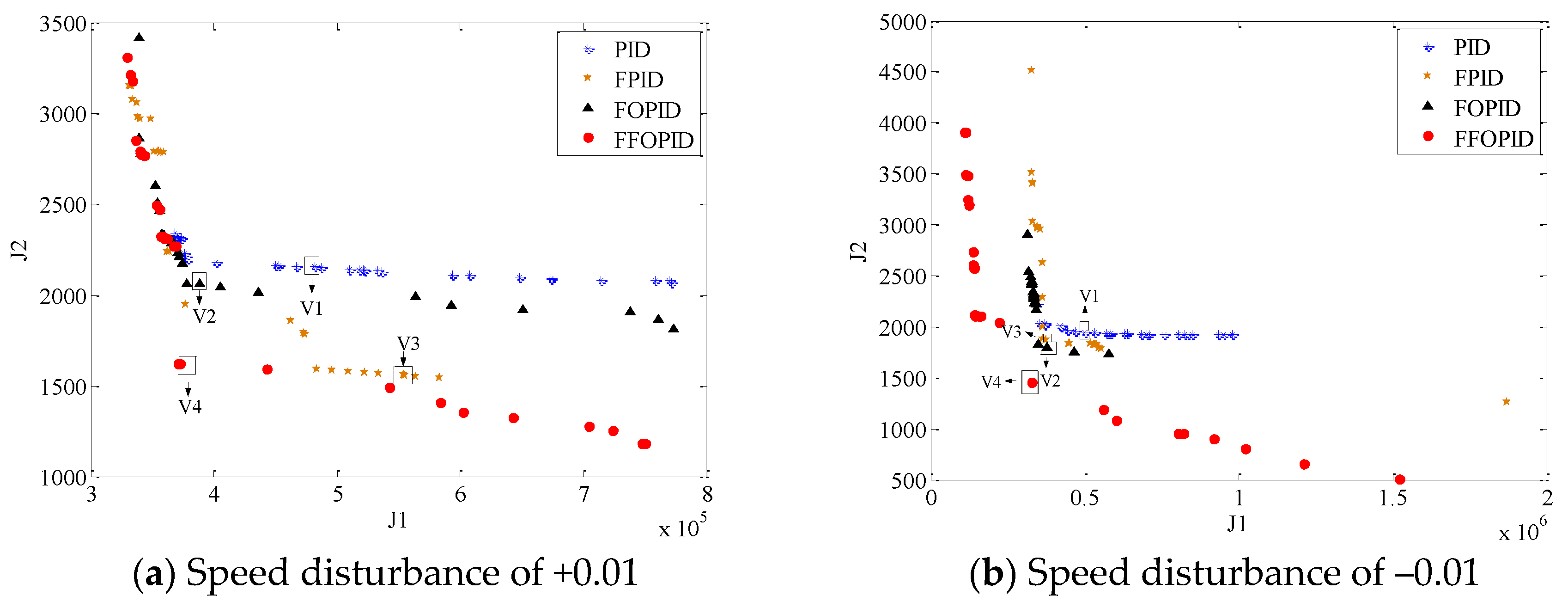
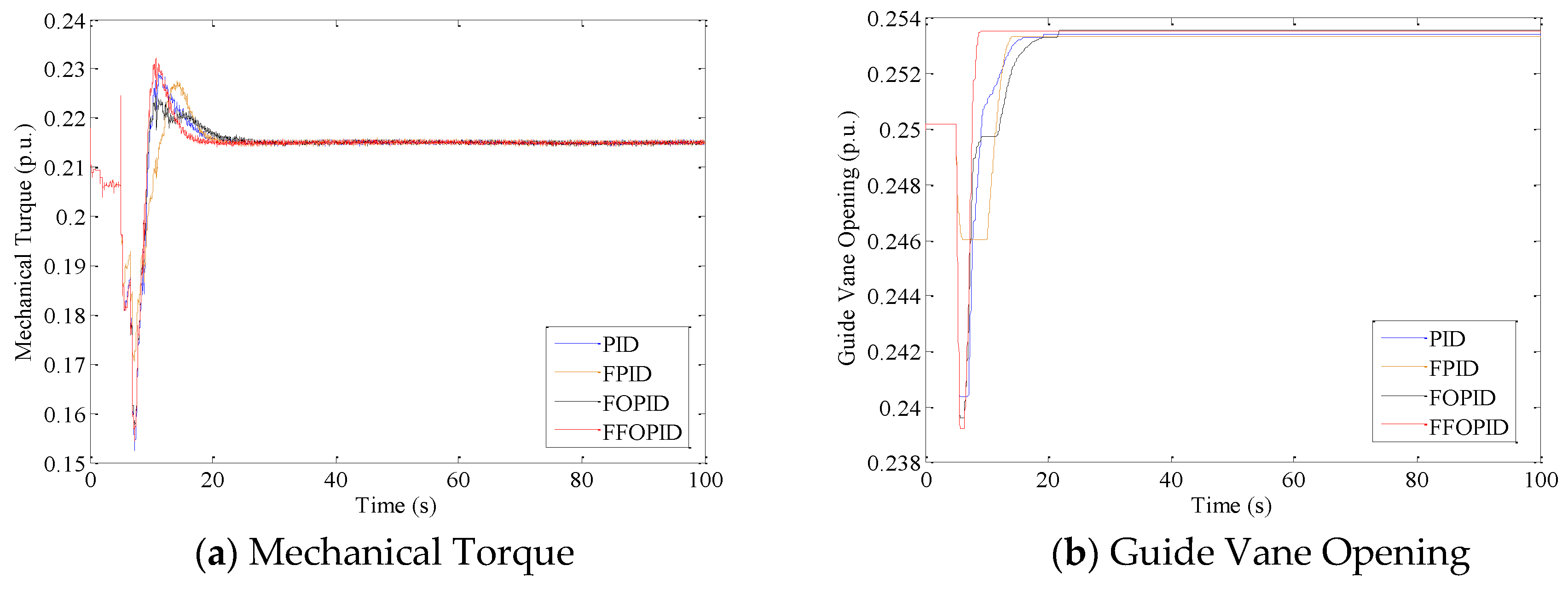
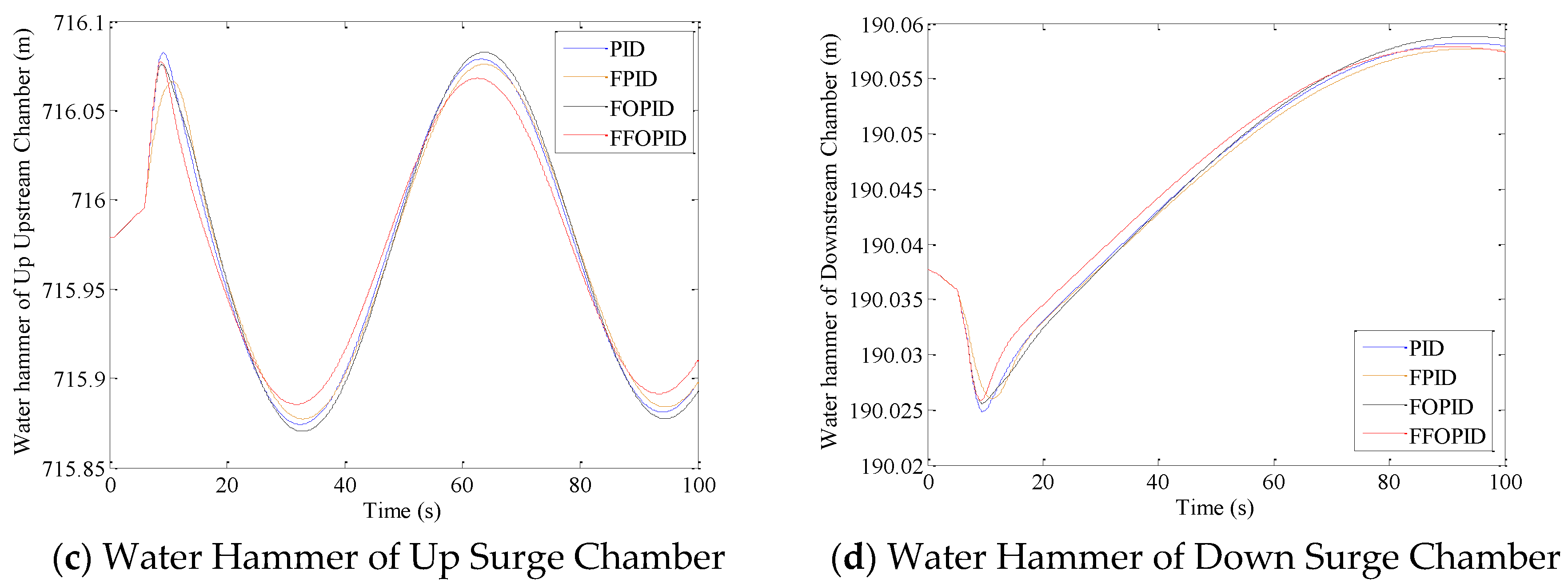
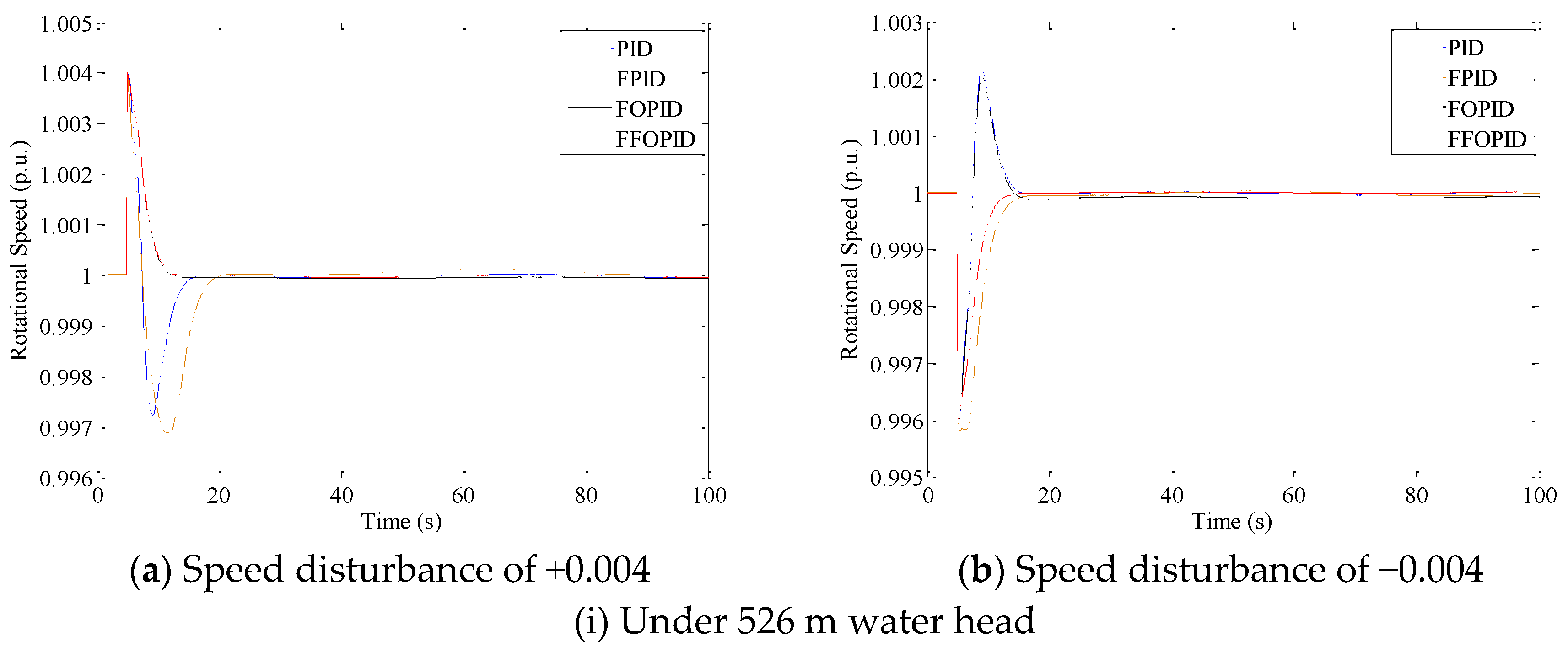
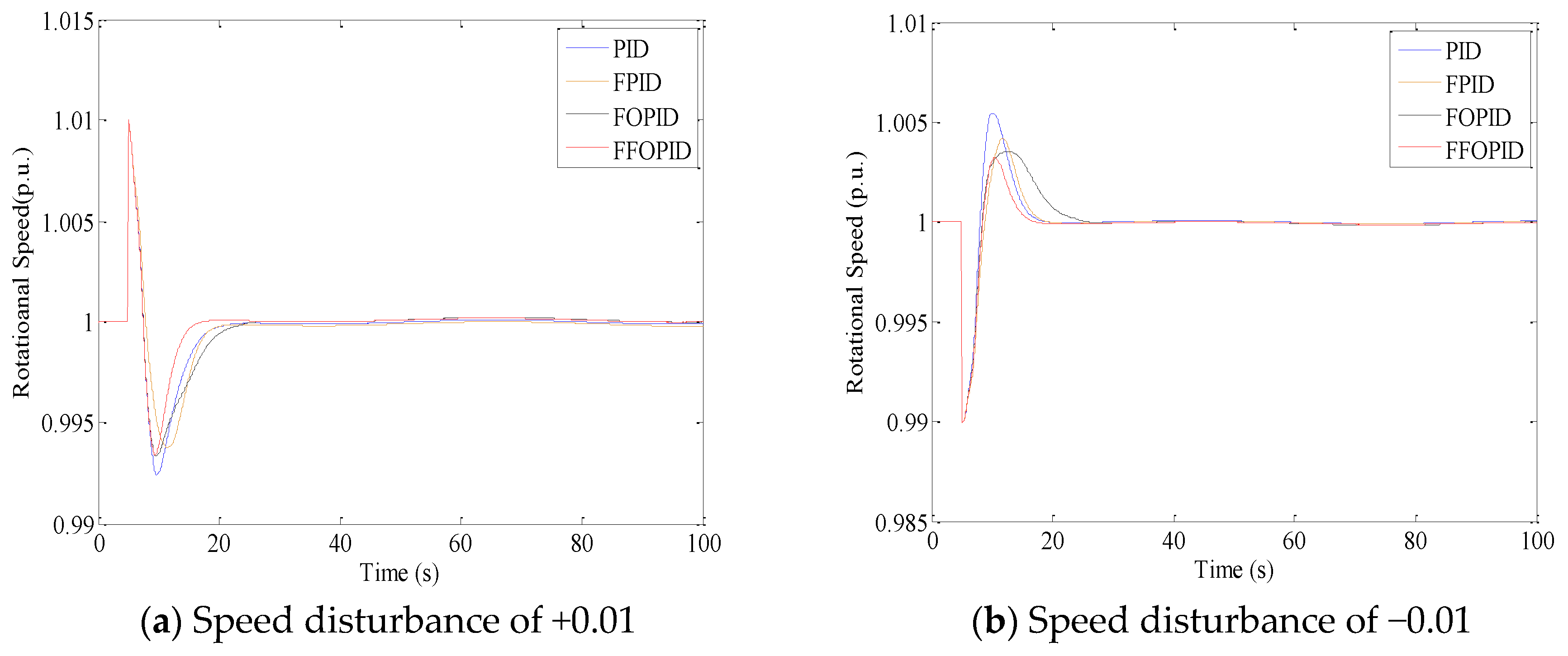
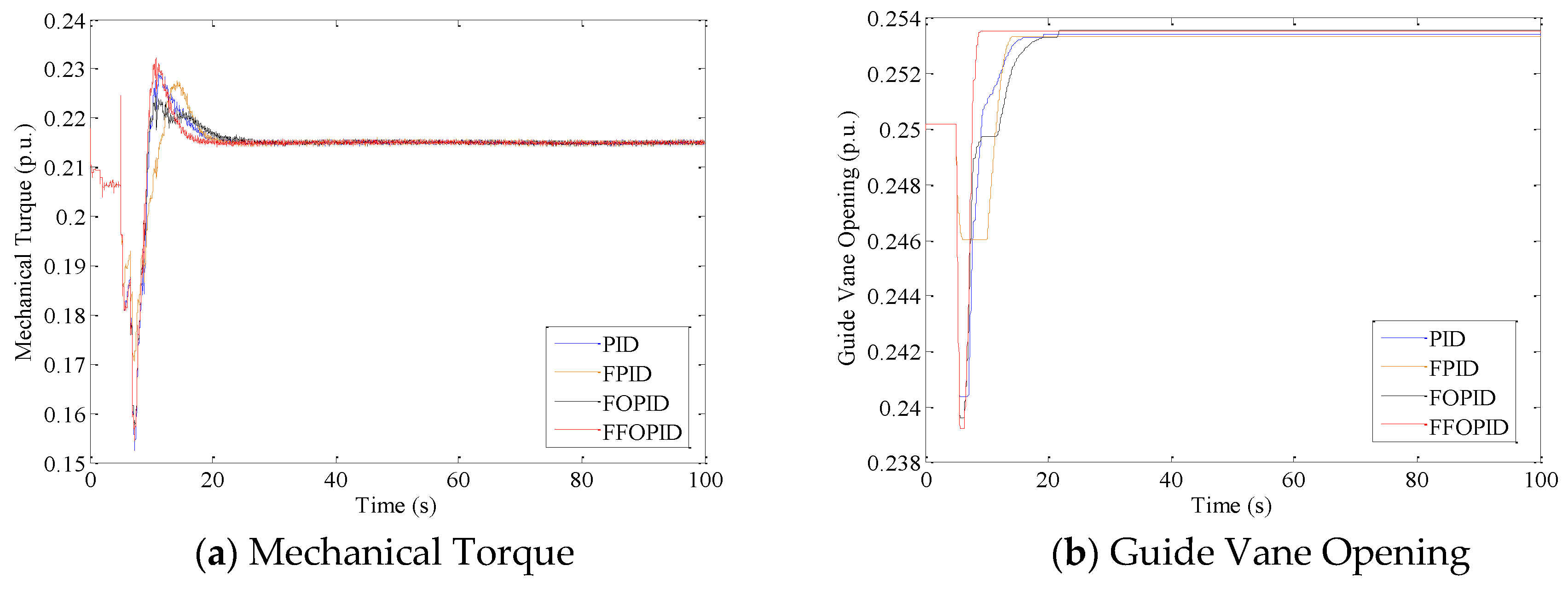
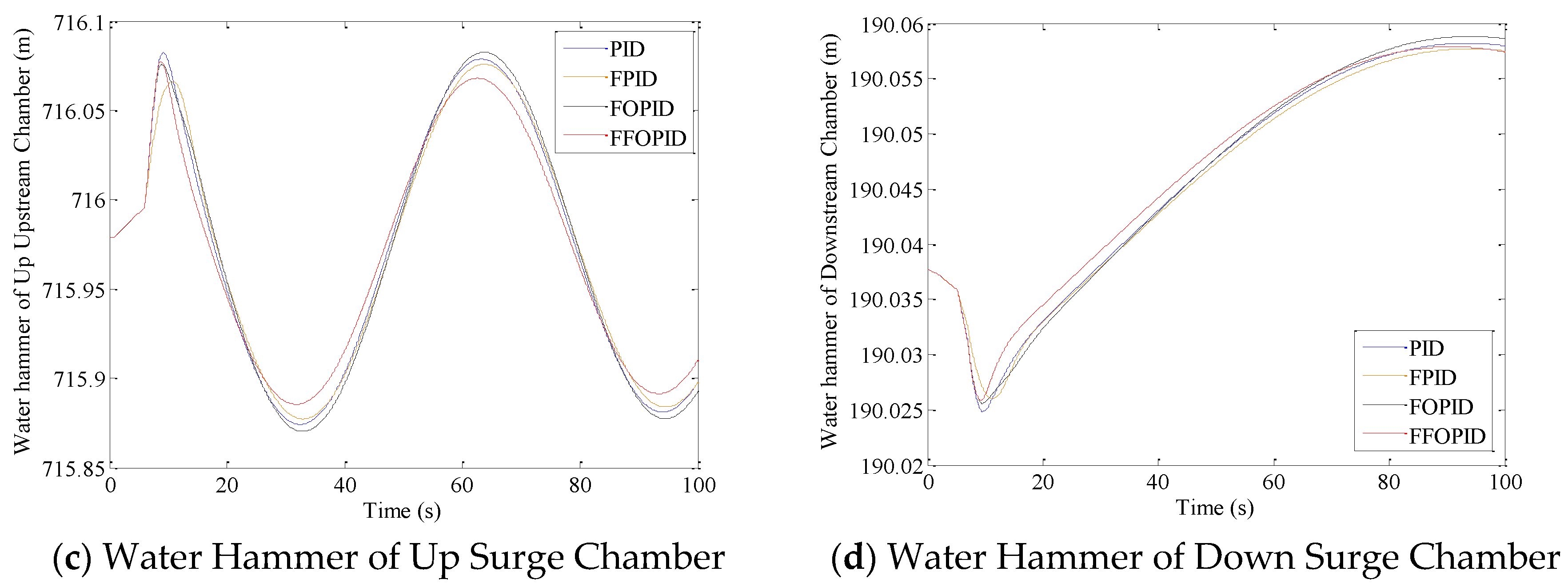
4.2. Comparison of the Performance of Different Controllers
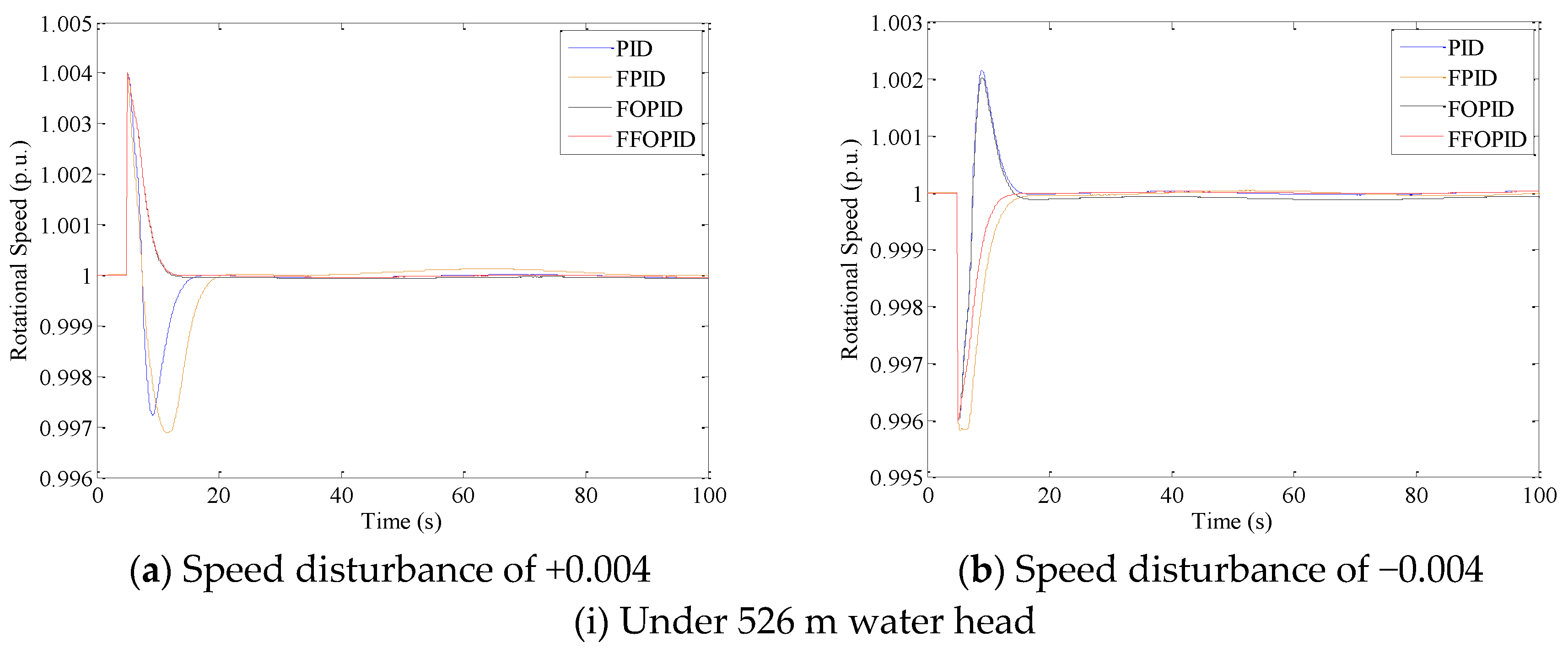
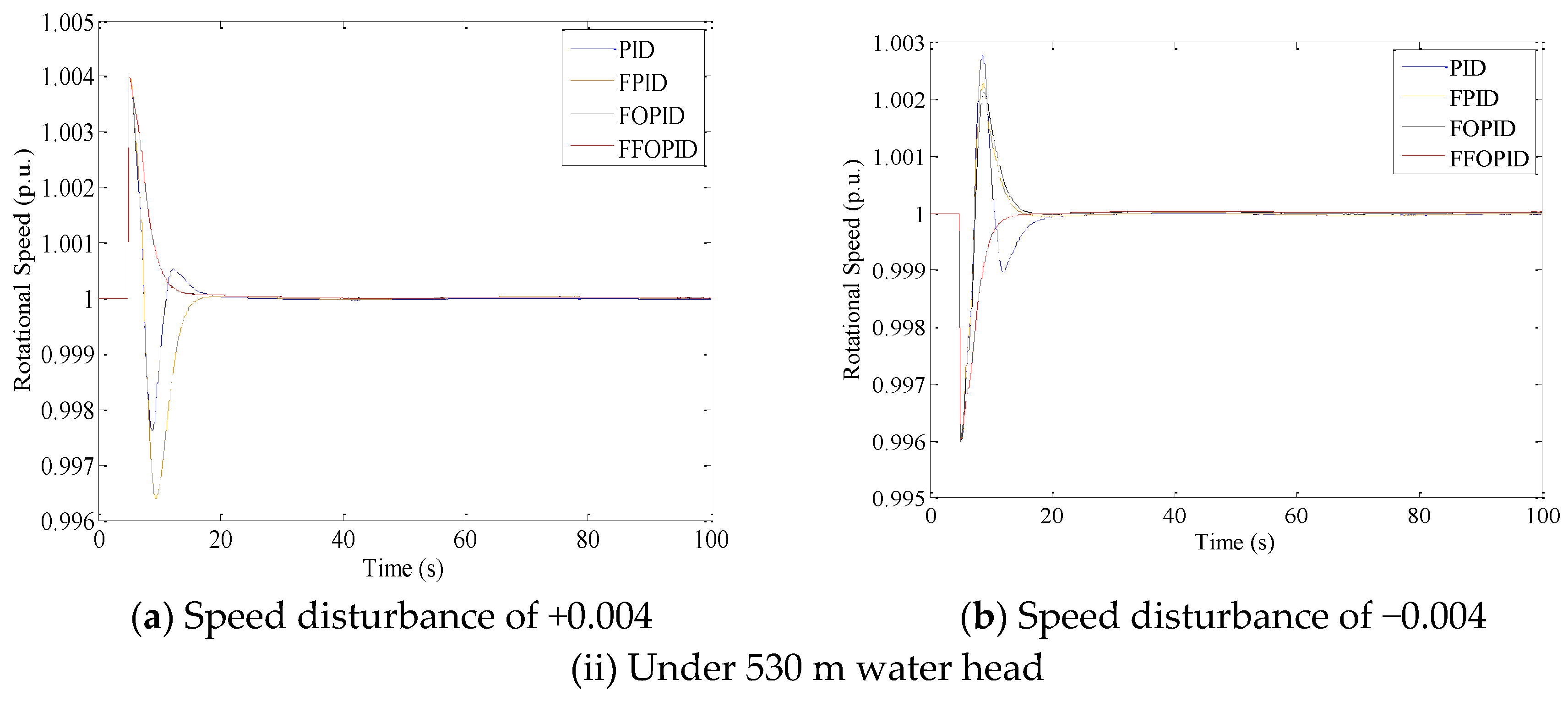
4.3. Robustness Analysis of the Proposed Method
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lai, X.; Li, C.; Zhou, J.; Zhang, N. Multi-objective optimization of the closure law of guide vanes for pumped storage units. Renew. Energy 2019, 139, 302–312. [Google Scholar] [CrossRef]
- Rehman, S.; Al-Hadhrami, L.M.; Alam, M.M. Pumped hydro energy storage system: A technological review. Renew. Sustain. Energy Rev. 2015, 44, 586–598. [Google Scholar] [CrossRef]
- Xu, Y.; Li, C.; Wang, Z.; Nan, Z.; Bing, P. Load frequency control of a novel renewable energy integrated micro-grid containing pumped hydropower energy storage. IEEE Access 2018, 6, 29067–29077. [Google Scholar] [CrossRef]
- Zhang, Z.; Yan, K.; Ge, W.; Yuan, J.; Shen, L.; Wang, S.J.; Liu, Q.; Pan, D.; Zhang, X. Research on Primary Frequency Modulation Strategy of Hydropower Unit; IEEE: New York, NY, USA, 2018; pp. 214–219. [Google Scholar]
- Chandrakala, V.; Sukumar, B.; Sankaranarayanan, K. Load Frequency Control of Multi-source Multi-area Hydro Thermal System Using Flexible Alternating Current Transmission System Devices. Electr. Power Compon. Syst. 2014, 42, 927–934. [Google Scholar] [CrossRef]
- Hu, Z.X.; Wang, Y.; Ge, M.F.; Liu, J. Data-driven Fault Diagnosis Method based on Compressed Sensing and Improved Multi-scale Network. IEEE Trans. Ind. Electron. 2020, 67, 3216–3225. [Google Scholar] [CrossRef]
- Wu, W. Primary frequency modulation performance optimization of large pumped storage unit. Electron. Test 2015, 23, 119–120. [Google Scholar]
- Li, C.; Zhang, N.; Lai, X.; Zhou, J.; Xu, Y. Design of a fractional-order PID controller for a pumped storage unit using a gravitational search algorithm based on the Cauchy and Gaussian mutation. Inf. Sci. 2017, 396, 162–181. [Google Scholar] [CrossRef]
- Zhao, Z.G.; Yang, J.D.; Yang, W.J.; Hu, J.H.; Chen, M. A coordinated optimization framework for flexible operation of pumped storage hydropower system: Nonlinear modeling, strategy optimization and decision making. Energy Conv. Manag. 2019, 194, 75–93. [Google Scholar] [CrossRef]
- Zhou, J.X.; Cai, F.L.; Wang, Y. New Elastic Model of Pipe Flow for Stability Analysis of the Governor-Turbine-Hydraulic System. J. Hydraul. Eng. ASCE 2011, 137, 1238–1247. [Google Scholar] [CrossRef]
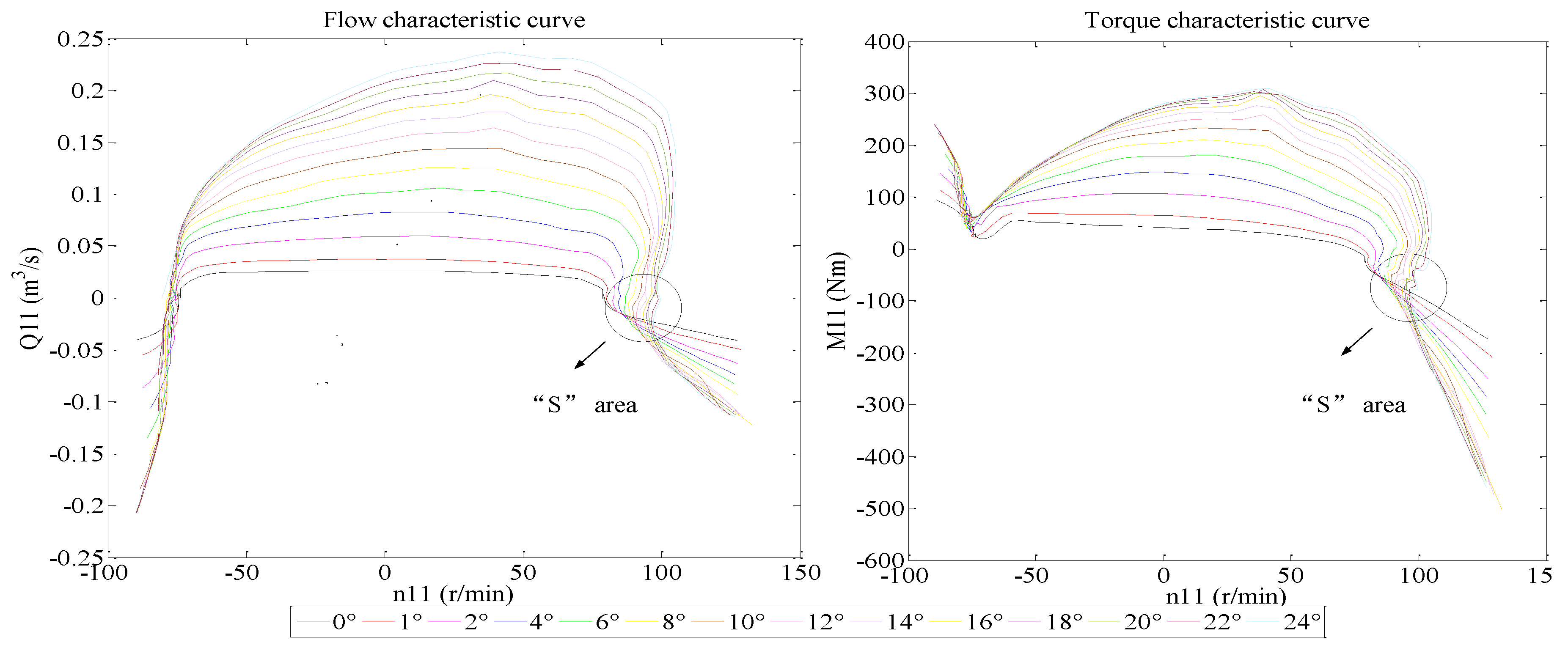
- Sun, H.; Xiao, R.; Liu, W.; Wang, F. Analysis of S Characteristics and Pressure Pulsations in a Pump-Turbine With Misaligned Guide Vanes. J. Fluids Eng. 2013, 135, 511011. [Google Scholar] [CrossRef]
- Yang, W.J.; Norrlund, P.; Bladh, J.; Yang, J.D.; Lundin, U. Hydraulic damping mechanism of low frequency oscillations in power systems: Quantitative analysis using a nonlinear model of hydropower plants. Appl. Energy 2018, 212, 1138–1152. [Google Scholar] [CrossRef]
- Yang, W.J.; Yang, J.D.; Zeng, W.; Tang, R.B.; Hou, L.Y.; Ma, A.T.; Zhao, Z.G.; Peng, Y.M. Experimental investigation of theoretical stability regions for ultra-low frequency oscillations of hydropower generating systems. Energy 2019, 186, 12. [Google Scholar] [CrossRef]
- Li, C.S.; Mao, Y.F.; Zhou, J.Z.; Zhang, N.; An, X.L. Design of a fuzzy-PID controller for a nonlinear hydraulic turbine governing system by using a novel gravitational search algorithm based on Cauchy mutation and mass weighting. Appl. Soft Comput. 2017, 52, 290–305. [Google Scholar] [CrossRef]
- Mohanty, P.K.; Sahu, B.K.; Pati, T.K.; Panda, S.; Kar, S.K. Design and analysis of fuzzy PID controller with derivative filter for AGC in multi-area interconnected power system. IET Gener. Transm. Distrib. 2016, 10, 3764–3776. [Google Scholar] [CrossRef]
- Sahu, B.K.; Pati, T.K.; Nayak, J.R.; Panda, S.; Kar, S.K. A novel hybrid LUS-TLBO optimized fuzzy-PID controller for load frequency control of multi-source power system. Int. J. Electr. Power Energy Syst. 2016, 74, 58–69. [Google Scholar] [CrossRef]
- Xu, Y.; Zheng, Y.; Du, Y.; Yang, W.; Peng, X.; Li, C. Adaptive condition predictive-fuzzy PID optimal control of start-up process for pumped storage unit at low head area. Energy Convers. Manag. 2018, 177, 592–604. [Google Scholar] [CrossRef]
- Wang, B.; Shi, K.; Yang, L.; Wu, F.; Chen, D. Fuzzy generalised predictive control for a class of fractional-order non-linear systems. IET Control Theory Appl. 2018, 12, 87–96. [Google Scholar] [CrossRef]
- Zamani, A.; Barakati, S.M.; Yousofi-Darmian, S. Design of a fractional order PID controller using GBMO algorithm for load–frequency control with governor saturation consideration. ISA Trans. 2016, 64, 56–66. [Google Scholar] [CrossRef]
- Arya, Y.; Kumar, N. BFOA-scaled fractional order fuzzy PID controller applied to AGC of multi-area multi-source electric power generating systems. Swarm Evol. Comput. 2016, 32, 202–218. [Google Scholar] [CrossRef]
- Chen, S.; Zhongning, H.E.; Zhou, Z.; Pan, G.; Yan, D. Study on transient process of low water-head large pumping station while pumping off. J. Hydroelectr. Eng. 2007, 26, 128–133. [Google Scholar]
- Yang, W.; Yang, J. Study on optimum start-up method for hydroelectric generating unit based on analysis of the energy relation. In Proceedings of the 2012 Asia-Pacific Power and Energy Engineering Conference, Shanghai, China, 27–29 March 2012. [Google Scholar]
- Bhattacharya, A.; Roy, P.K. Solution of multi-objective optimal power flow using gravitational search algorithm. IET Gener. Transm. Distrib. 2012, 6, 751–763. [Google Scholar] [CrossRef]
- Nobahari, H.; Nikusokhan, M.; Siarry, P. A Multi-Objective Gravitational Search Algorithm Based on Non-Dominated Sorting. Int. J. Swarm Intell. Res. IJSIR 2012, 3, 32–49. [Google Scholar] [CrossRef] [Green Version]
- Tawhid, M.A.; Savsani, V. A novel multi-objective optimization algorithm based on artificial algae for multi-objective engineering design problems. Appl. Intell. 2018, 48, 3762–3781. [Google Scholar] [CrossRef]
- Hemmatian, H.; Fereidoon, A.; Assareh, E. Optimization of hybrid laminated composites using the multi-objective gravitational search algorithm (MOGSA). Eng. Optim. 2014, 46, 1169–1182. [Google Scholar] [CrossRef]
- Moghadam, M.S.; Nezamabadi-Pour, H.; Farsangi, M.M. A Quantum Behaved Gravitational Search Algorithm. Intell. Inf. Manag. 2012, 4, 390–395. [Google Scholar] [CrossRef] [Green Version]
- Wyrzykowski, L.; Udalski, A.; Kubiak, M.; Szymanski, M.; Zebrun, K.; Soszynski, I.; Wozniak, P.R.; Pietrzynski, G.; Szewczyk, O. The Optical Gravitational Lensing Experiment. Eclipsing Binary Stars in the Large Magellanic Cloud. J. Physiol. 2003, 340, 195–208. [Google Scholar]
- Naserbegi, A.; Aghaie, M.; Minuchehr, A.; Alahyarizadeh, G. A novel exergy optimization of Bushehr nuclear power plant by gravitational search algorithm (GSA). Energy 2018, 148, 373–385. [Google Scholar] [CrossRef]
- Assareh, E.; Biglari, M. A novel approach to capture the maximum power from variable speed wind turbines using PI controller, RBF neural network and GSA evolutionary algorithm. Renew. Sustain. Energ. Rev. 2015, 51, 1023–1037. [Google Scholar] [CrossRef]
- Xu, Y.; Zhou, J.; Xue, X.; Fu, W.; Zhu, W.; Li, C. An adaptively fast fuzzy fractional order PID control for pumped storage hydro unit using improved gravitational search algorithm. Energy Convers. Manag. 2016, 111, 67–78. [Google Scholar] [CrossRef]
- Afshar, M.H.; Rohani, M. Water hammer simulation by implicit method of characteristic. Int. J. Press. Vessel. Pip. 2008, 85, 851–859. [Google Scholar] [CrossRef]
- Sim, W.G.; Park, J.H. Transient analysis for compressible fluid flow in transmission line by the method of characteristics. KSME Int. J. 1997, 11, 173–185. [Google Scholar] [CrossRef]
- Zamani, M.; Karimi-Ghartemani, M.; Sadati, N.; Parniani, M. Design of a fractional order PID controller for an AVR using particle swarm optimization. Control Eng. Pract. 2009, 17, 1380–1387. [Google Scholar] [CrossRef]
- Oustaloup, A.; Levron, F.; Mathieu, B.; Nanot, F.M. Frequency-band complex noninteger differentiator: Characterization and synthesis. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2000, 47, 25–39. [Google Scholar] [CrossRef]
- Hou, J.J.; Li, C.S.; Tian, Z.Q.; Xu, Y.H.; Lai, X.J.; Zhang, N.; Zheng, T.P.; Wu, W. Multi-Objective Optimization of Start-up Strategy for Pumped Storage Units. Energies 2018, 11, 1141. [Google Scholar] [CrossRef] [Green Version]
- Suter, P. Representation of pump characteristic for calculation of water hammer. Sulzer Tech. Rev. 1966, 66, 45–48. [Google Scholar]
- Zheng, X.B.; Guo, P.C.; Tong, H.Z.; Luo, X.Q. Improved Suter-transformation for complete characteristic curves of pump-turbine. IOP Conf. Ser. Earth Environ. Sci. 2012, 15, 062015. [Google Scholar] [CrossRef]
- Yang, W.J.; Yang, J.D.; Guo, W.C.; Zeng, W.; Wang, C.; Saarinen, L.; Norrlund, P. A Mathematical Model and Its Application for Hydro Power Units under Different Operating Conditions. Energies 2015, 8, 10260–10275. [Google Scholar]
- Pan, I.; Das, S.; Gupta, A. Tuning of an optimal fuzzy PID controller with stochastic algorithms for networked control systems with random time delay. ISA Trans. 2011, 50, 28–36. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NB | NM | NS | ZO | PS | PM | PB | |
|---|---|---|---|---|---|---|---|
| NB | PB | PB | PM | PM | PS | Z | Z |
| NM | PB | PB | PM | PS | PS | Z | NS |
| NS | PM | PM | PM | PS | Z | NS | NS |
| ZO | PM | PM | PS | Z | NS | NM | NM |
| PS | PS | PS | Z | NS | NS | NM | NM |
| PM | PS | Z | NS | NM | NM | NM | NB |
| PB | Z | Z | NM | NM | NM | NB | NB |
| NB | NM | NS | ZO | PS | PM | PB | |
|---|---|---|---|---|---|---|---|
| NB | NB | NB | NM | NM | NS | Z | Z |
| NM | NB | NB | NM | NS | NS | Z | Z |
| NS | NB | NM | NS | NS | Z | PS | PS |
| ZO | NM | NM | NS | Z | PS | PM | PM |
| PS | NM | NS | Z | PS | PS | PM | PB |
| PM | Z | Z | PS | PS | PM | PB | PB |
| PB | Z | Z | PM | PM | PM | PB | PB |
| NB | NM | NS | ZO | PS | PM | PB | |
|---|---|---|---|---|---|---|---|
| NB | PS | NS | NB | NB | NB | NM | PS |
| NM | PS | NS | NB | NM | NM | NS | Z |
| NS | Z | NS | NM | NM | NS | NS | Z |
| ZO | Z | NS | NS | NS | NS | NS | Z |
| PS | Z | Z | Z | Z | Z | Z | Z |
| PM | PB | NS | PS | PS | PS | PS | PB |
| PB | PB | PM | PM | PM | PS | PS | PB |
| Controller | Optimization Variables |
|---|---|
| PID controller | |
| FOPID controller | |
| FPID controller | |
| FFOPID controller | |
| Definition: PID is proportional-integral-derivative | |
| Definition: FOPID is fractional-order proportional-integral-derivative | |
| Definition: FPID is fuzzy proportional-integral-derivative | |
| Definition: FFOPID is fuzzy fractional-order proportional-integral-derivative | |
| Median servomotor response time | 0.05 |
| Primary servomotor response time | 0.3 |
| Water head loss coefficient | 0.75 |
| Water hammer pressure wave time constant | 1.0 |
| Inertial time constant of generator | 8.503 |
| Adjusting coefficient of generator | 0.1 |
| Rated water head | 540.0 |
| Speed Disturbance | Controller | Optimization Variables |
|---|---|---|
| +0.01 | PID | |
| FOPID | ||
| FPID | ||
| FFOPID | ||
| −0.01 | PID | |
| FOPID | ||
| FPID | ||
| FFOPID |
| Speed Disturbance | Controller | ||||||
|---|---|---|---|---|---|---|---|
| +0.01 | PID | 4.821 | 2.155 | 43.74 | 120.17 | 0.0176 | 11.48 |
| FPID | 5.55 | 1.55 | 52.84 | 99.89 | 0.0162 | 11.94 | |
| FOPID | 3.884 | 2.061 | 59.03 | 152.10 | 0.0167 | 13.44 | |
| FFOPID | 3.772 | 1.623 | 42.54 | 143.14 | 0.0166 | 8.66 | |
| –0.01 | PID | 5.016 | 1.948 | 31.76 | 122.47 | 0.0155 | 9.52 |
| FPID | 3.753 | 1.870 | 32.56 | 112.09 | 0.0142 | 10.54 | |
| FOPID | 3.792 | 1.793 | 43.79 | 111.96 | 0.0135 | 12.98 | |
| FFOPID | 3.299 | 1.458 | 28.45 | 99.59 | 0.0133 | 8.32 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, X.; Xu, Y.; Liu, J.; Lv, C.; Zhou, J.; Zhang, Q. Characteristics Analysis and Fuzzy Fractional-Order PID Parameter Optimization for Primary Frequency Modulation of a Pumped Storage Unit Based on a Multi-Objective Gravitational Search Algorithm. Energies 2020, 13, 137. https://doi.org/10.3390/en13010137
Wu X, Xu Y, Liu J, Lv C, Zhou J, Zhang Q. Characteristics Analysis and Fuzzy Fractional-Order PID Parameter Optimization for Primary Frequency Modulation of a Pumped Storage Unit Based on a Multi-Objective Gravitational Search Algorithm. Energies. 2020; 13(1):137. https://doi.org/10.3390/en13010137
Chicago/Turabian StyleWu, Xin, Yanhe Xu, Jie Liu, Cong Lv, Jianzhong Zhou, and Qing Zhang. 2020. "Characteristics Analysis and Fuzzy Fractional-Order PID Parameter Optimization for Primary Frequency Modulation of a Pumped Storage Unit Based on a Multi-Objective Gravitational Search Algorithm" Energies 13, no. 1: 137. https://doi.org/10.3390/en13010137