Uses of the Popov Stability Criterion for Analyzing Global Asymptotic Stability in Power System Dynamic Models



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- With respect to linearization techniques, the proposed approach provides information on the global stability of an equilibrium point of a power system model, rather than on its local stability.
- With respect to numerical techniques, the proposed approach provides analytical conditions, which apply generally to the type of system under study.
- With respect to direct methods, the proposed approach provides a systematic procedure for applying the Popov stability criterion in various power system models, which has not been used before in this application, and thus enables a systematic analysis of several small-scale systems, as described in the text below.
2. Materials and Methods
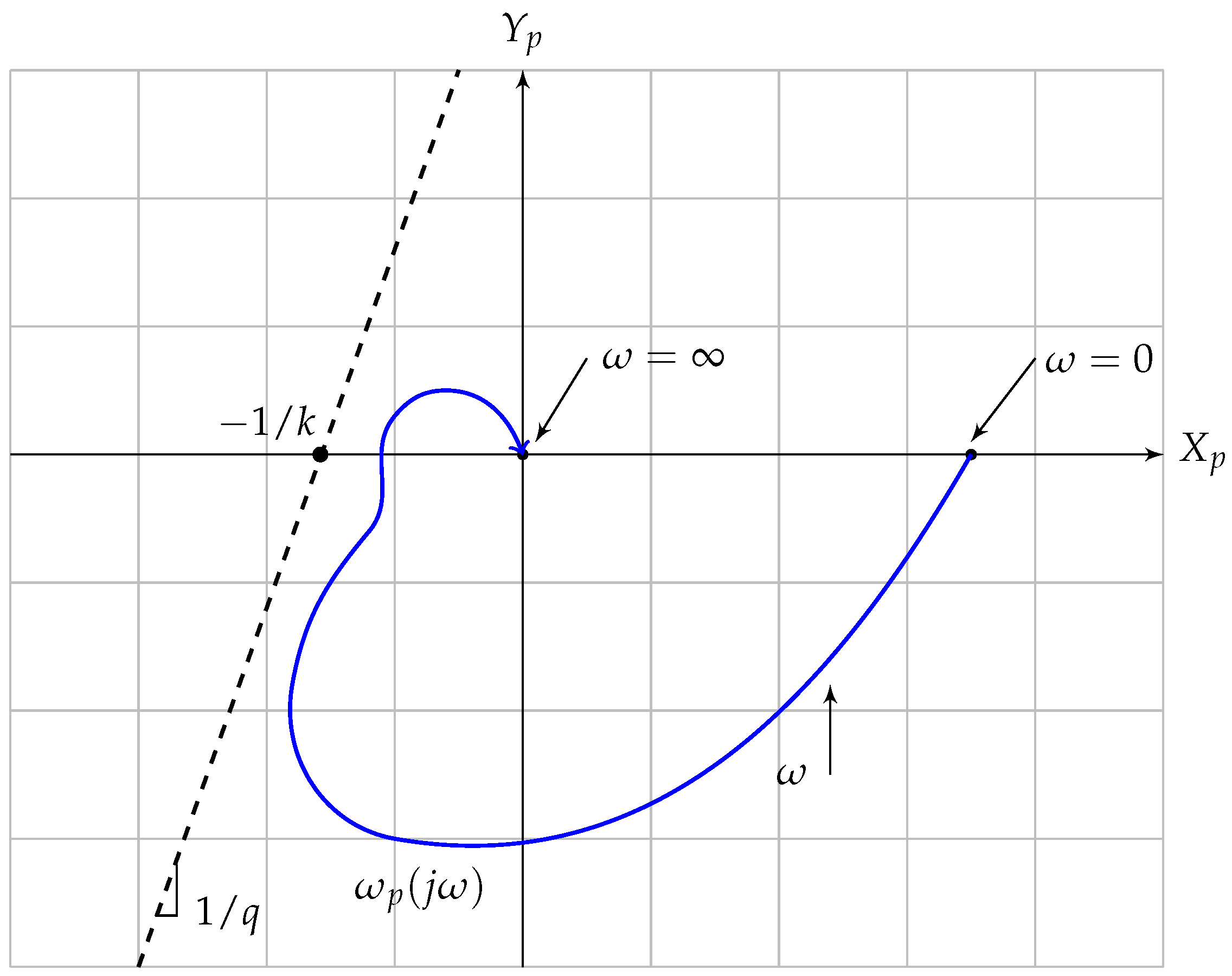
2.1. Mathematical Background—The Popov Stability Criterion
- The eigenvalues of the constant matrix A are in the open left half-plane,
- ,
- , for all , where k is a positive constant.
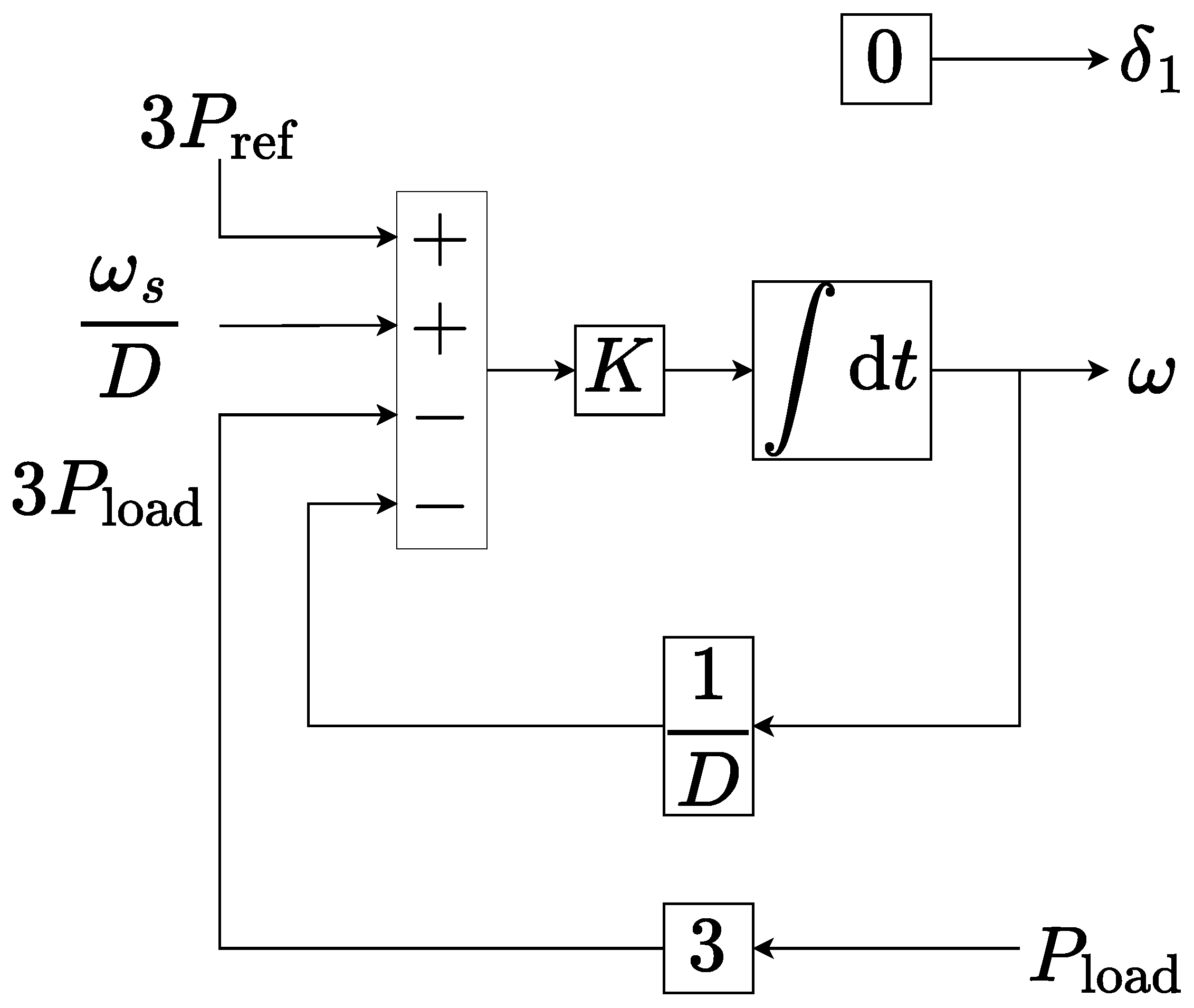
2.2. Dynamic Stability of Synchronous Generator Connected to Non-Linear Frequency Dependent Load
- There exists such that ,
- There exists such that ,
- .
- ,
- ,
- ,
- .
2.3. Synchronous Machine Driving Resistive–Inductive Load
2.4. Synchronous Machine Driving a Lossless Synchronous Motor with a Quasi-Linear Mechanical Load
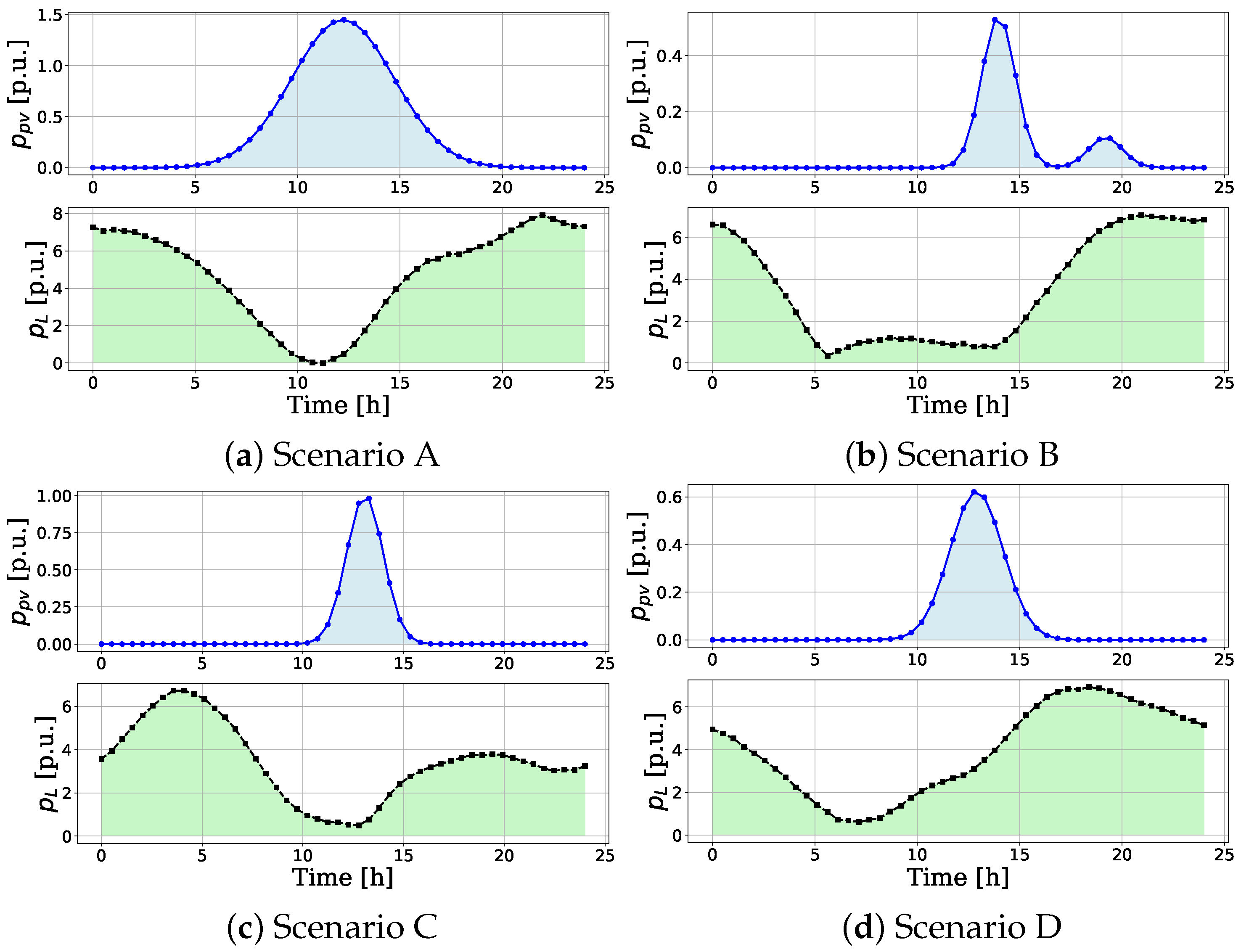
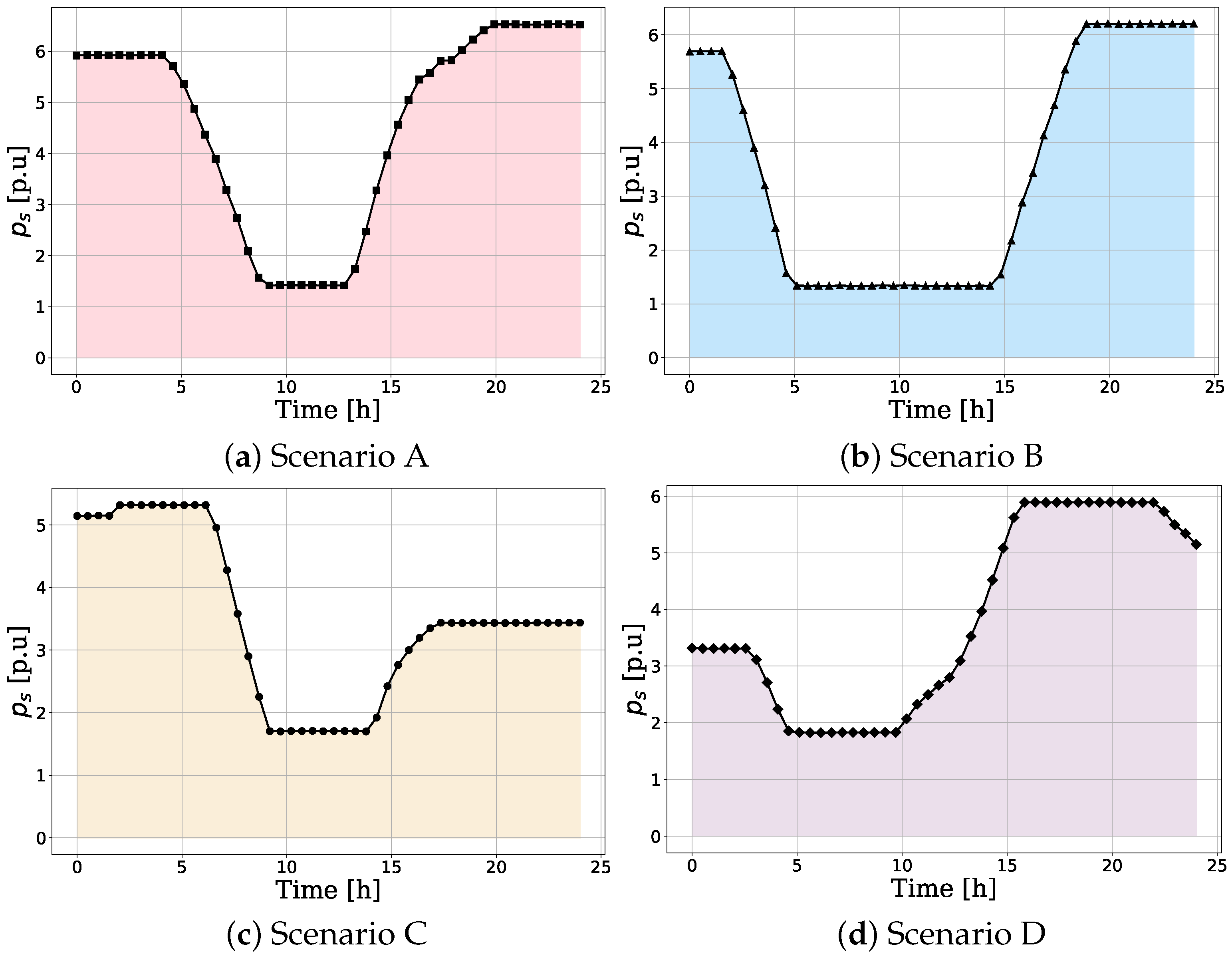
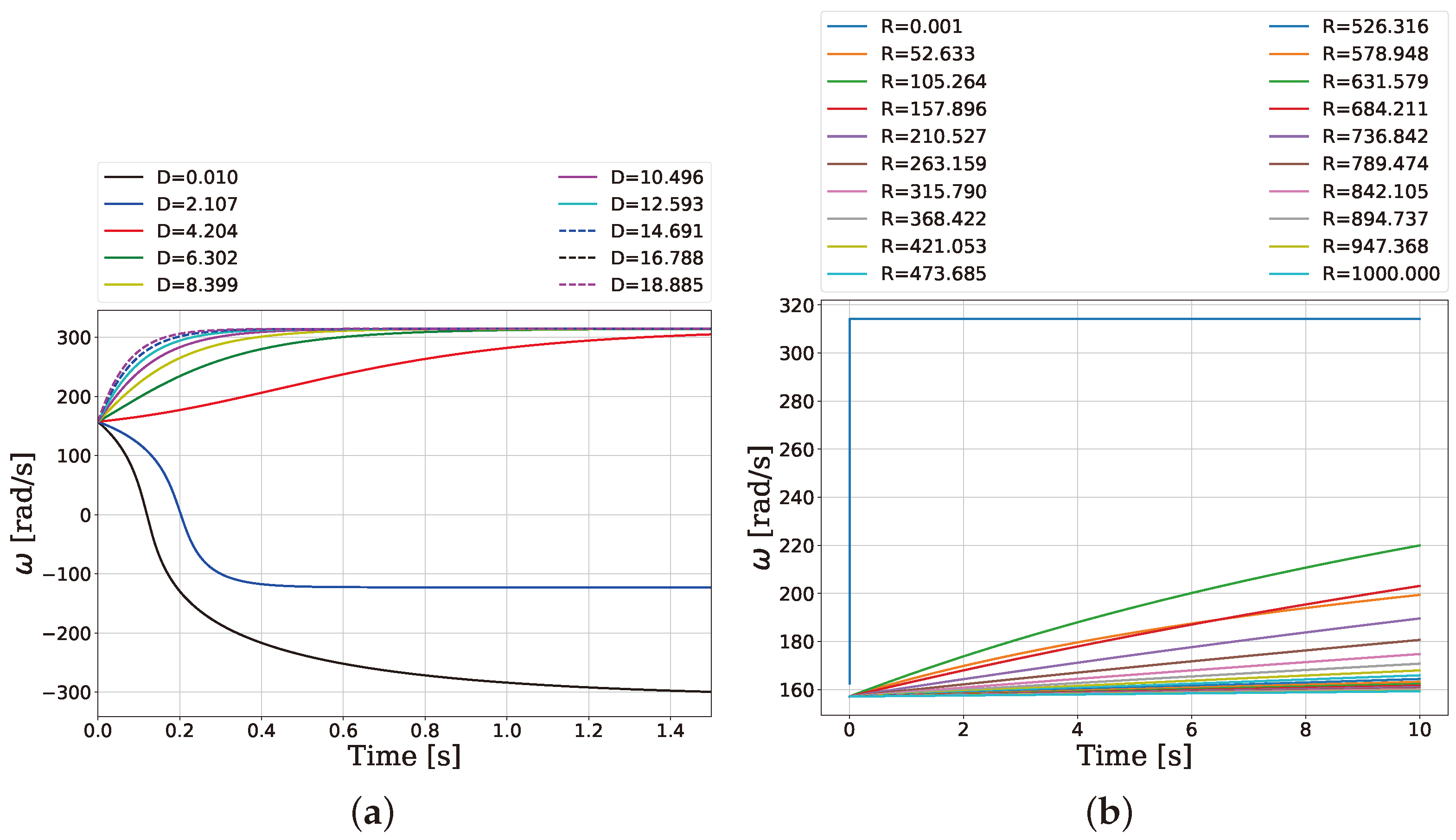
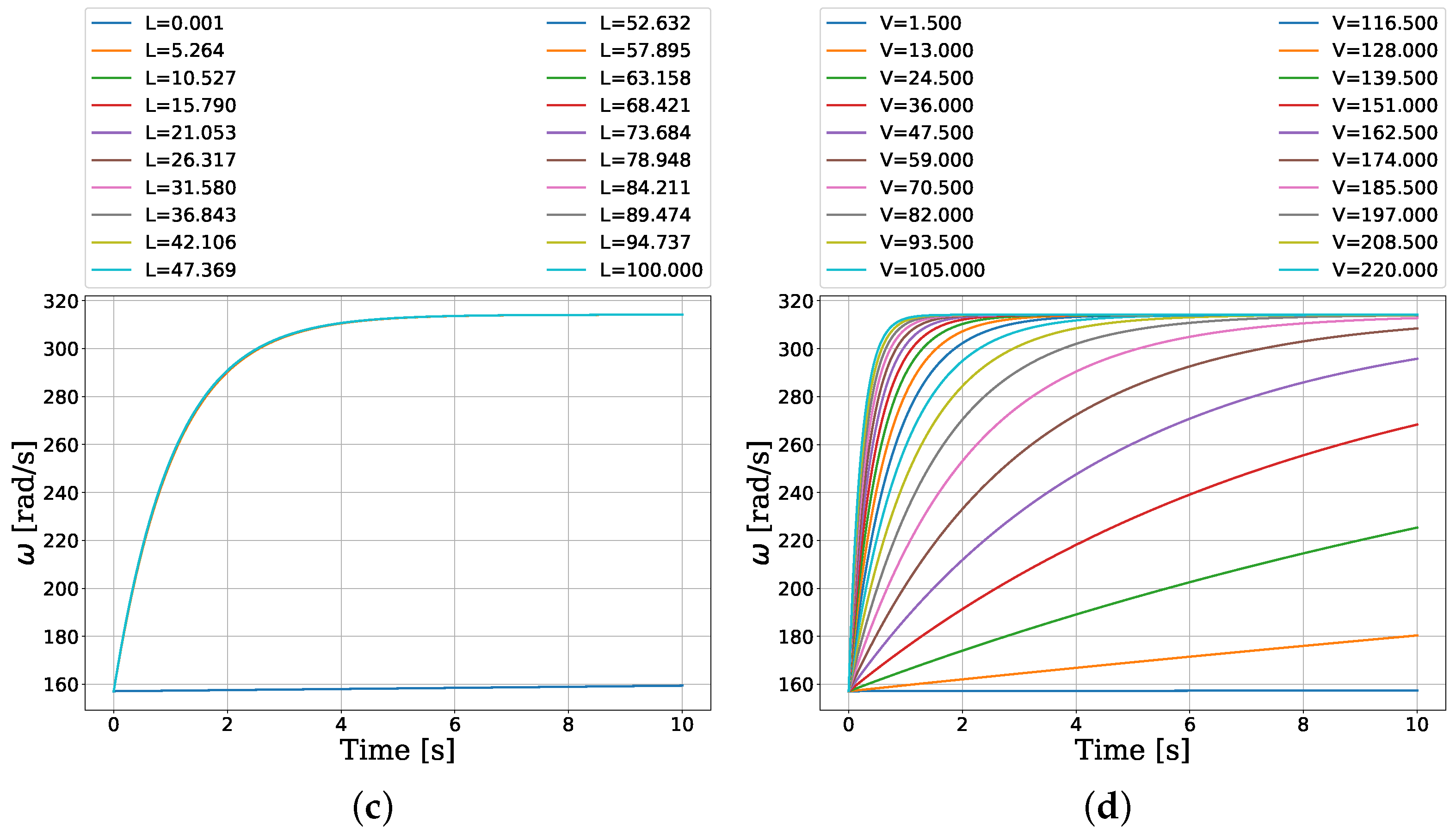
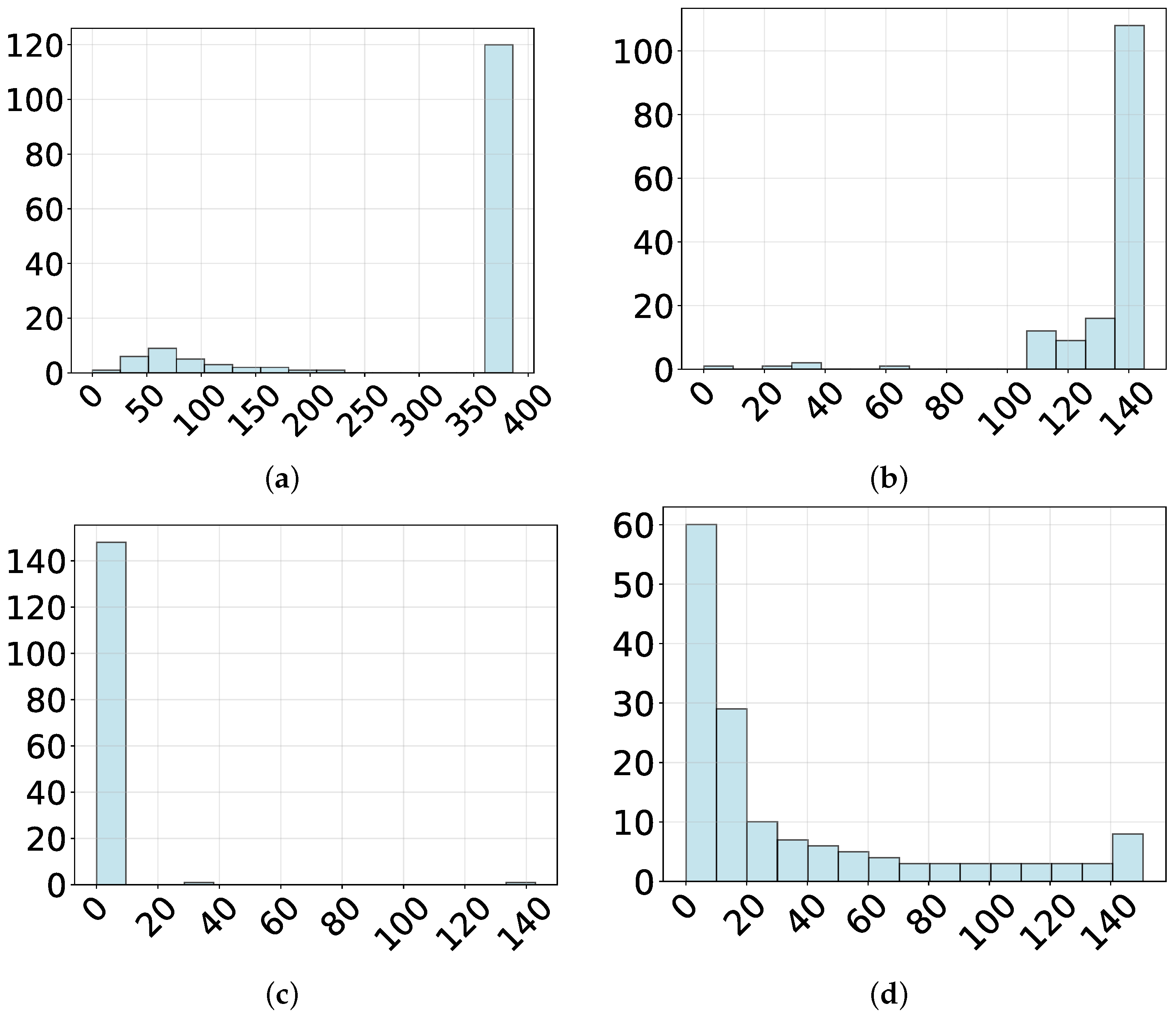
3. Numeric Results
4. Discussion and Future Work
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kundur, P. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Kundur, P.; Paserba, J.; Ajjarapu, V.; Andersson, G.; Bose, A.; Canizares, C.; Hatziargyriou, N.; Hill, D.; Stankovic, A.; Taylor, C.; et al. Definition and classification of power system stability IEEE/CIGRE joint task force on stability terms and definitions. IEEE Trans. Power Syst. 2004, 19, 1387–1401. [Google Scholar] [CrossRef]
- Caliskan, S.Y.; Tabuada, P. Compositional Transient Stability Analysis of Multimachine Power Networks. IEEE Trans. Control Netw. Syst. 2014, 1, 4–14. [Google Scholar] [CrossRef]
- Fernández-Guillamón, A.; Gómez-Lázaro, E.; Muljadi, E.; Molina-García, Á. Power systems with high renewable energy sources: A review of inertia and frequency control strategies over time. Renew. Sustain. Energy Rev. 2019, 115, 109369. [Google Scholar] [CrossRef]
- Meegahapola, L.; Sguarezi, A.; Bryant, J.S.; Gu, M.; Conde D, E.R.; Cunha, R.B.A. Power System Stability with Power-Electronic Converter Interfaced Renewable Power Generation: Present Issues and Future Trends. Energies 2020, 13, 3441. [Google Scholar] [CrossRef]
- Bevrani, H.; Ghosh, A.; Ledwich, G. Renewable energy sources and frequency regulation: Survey and new perspectives. IET Renew. Power Gener. 2010, 4, 438–457. [Google Scholar] [CrossRef]
- Golpîra, H.; Atarodi, A.; Amini, S.; Messina, A.R.; Francois, B.; Bevrani, H. Optimal Energy Storage System-Based Virtual Inertia Placement: A Frequency Stability Point of View. IEEE Trans. Power Syst. 2020, 35, 4824–4835. [Google Scholar] [CrossRef]
- Mosca, C.; Arrigo, F.; Mazza, A.; Bompard, E.; Carpaneto, E.; Chicco, G.; Cuccia, P. Mitigation of frequency stability issues in low inertia power systems using synchronous compensators and battery energy storage systems. IET Gener. Transm. Distrib. 2019, 13, 3951–3959. [Google Scholar] [CrossRef]
- Serban, I.; Teodorescu, R.; Marinescu, C. Energy storage systems impact on the short-term frequency stability of distributed autonomous microgrids, an analysis using aggregate models. IET Renew. Power Gener. 2013, 7, 531–539. [Google Scholar] [CrossRef]
- Süli, E.; Mayers, D.F. An Introduction to Numerical Analysis; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Nielsen, K.L. Methods in Numerical Analysis.; MACMILLAN: New York, NY, USA, 1956. [Google Scholar]
- Montoya, O.D.; Gil-González, W. On the numerical analysis based on successive approximations for power flow problems in AC distribution systems. Electr. Power Syst. Res. 2020, 187, 106454. [Google Scholar] [CrossRef]
- Socha, L. Linearization Methods for Stochastic Dynamic Systems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Liang, X. Linearization Approach for Modeling Power Electronics Devices in Power Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 1003–1012. [Google Scholar] [CrossRef]
- Sun, J. Small-Signal Methods for AC Distributed Power Systems—A Review. IEEE Trans. Power Electron. 2009, 24, 2545–2554. [Google Scholar] [CrossRef]
- Persson, J.; Söder, L. Comparison of threes linearization methods. In Proceedings of the 16th Power System Computation Conference, Power Systems Computation Conference (PSCC), Glasgow, UK, 14–18 July 2008. [Google Scholar]
- Slotine, J.J.E. Applied Nonlinear Control; Pearson: London, UK, 1991. [Google Scholar]
- Isidori, A. Nonlinear Control Systems: An Introduction; Springer: Berlin/Heidelberg, Germany, 1985. [Google Scholar]
- Willems, J. Direct method for transient stability studies in power system analysis. IEEE Trans. Autom. Control 1971, 16, 332–341. [Google Scholar] [CrossRef]
- Chang, H.D.; Chu, C.C.; Cauley, G. Direct stability analysis of electric power systems using energy functions: Theory, applications, and perspective. Proc. IEEE 1995, 83, 1497–1529. [Google Scholar] [CrossRef]
- Zhai, C.; Nguyen, H.D. Estimating the Region of Attraction for Power Systems Using Gaussian Process and Converse Lyapunov Function. IEEE Trans. Control Syst. Technol. 2022, 30, 1328–1335. [Google Scholar] [CrossRef]
- Kazemi, A.; Motlagh, M.J.; Naghshbandy, A. Application of a new multi-variable feedback linearization method for improvement of power systems transient stability. Int. J. Electr. Power Energy Syst. 2007, 29, 322–328. [Google Scholar] [CrossRef]
- Tzounas, G.; Dassios, I.; Milano, F. Small-signal stability analysis of implicit integration methods for power systems with delays. Electr. Power Syst. Res. 2022, 211, 108266. [Google Scholar] [CrossRef]
- Kannan, A.; Nuschke, M.; Dobrin, B.P.; Strauß-Mincu, D. Frequency stability analysis for inverter dominated grids during system split. Electr. Power Syst. Res. 2020, 188, 106550. [Google Scholar] [CrossRef]
- Soultanis, N.L.; Papathanasiou, S.A.; Hatziargyriou, N.D. A Stability Algorithm for the Dynamic Analysis of Inverter Dominated Unbalanced LV Microgrids. IEEE Trans. Power Syst. 2007, 22, 294–304. [Google Scholar] [CrossRef]
- Gu, Y.; Green, T.C. Power System Stability with a High Penetration of Inverter-Based Resources. Proc. IEEE 2023, 111, 832–853. [Google Scholar] [CrossRef]
- Arul, P.; Ramachandaramurthy, V.K.; Rajkumar, R. Control strategies for a hybrid renewable energy system: A review. Renew. Sustain. Energy Rev. 2015, 42, 597–608. [Google Scholar] [CrossRef]
- Nassar, I.; Elsayed, I.; Abdella, M. Optimization and Stability Analysis of Offshore Hybrid Renewable Energy Systems. In Proceedings of the 2019 21st International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 17–19 December 2019; pp. 583–588. [Google Scholar] [CrossRef]
- Aggarwal, J.K.; Johnson, S. Notes on Nonlinear Systems. 1977. Available online: https://www.amazon.com/Nonlinear-Systems-Jagdishkumar-Keshoram-Aggarwal/dp/0442202636 (accessed on 19 December 2024).
- Yang, J.; Cai, Y.; Pan, C.; Mi, C. A novel resistor-inductor network-based equivalent circuit model of lithium-ion batteries under constant-voltage charging condition. Appl. Energy 2019, 254, 113726. [Google Scholar] [CrossRef]
- Shobayo, L.O.; Dao, C.D. Smart Integration of Renewable Energy Sources Employing Setpoint Frequency Control—An Analysis on the Grid Cost of Balancing. Sustainability 2024, 16, 9906. [Google Scholar] [CrossRef]
- Dreidy, M.; Mokhlis, H.; Mekhilef, S. Inertia response and frequency control techniques for renewable energy sources: A review. Renew. Sustain. Energy Rev. 2017, 69, 144–155. [Google Scholar] [CrossRef]
- Zhong, Q.C.; Weiss, G. Synchronverters: Inverters That Mimic Synchronous Generators. IEEE Trans. Ind. Electron. 2011, 58, 1259–1267. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ginzburg-Ganz, E.; Belikov, J.; Katzir, L.; Levron, Y. Uses of the Popov Stability Criterion for Analyzing Global Asymptotic Stability in Power System Dynamic Models. Energy Storage Appl. 2024, 1, 54-72. https://doi.org/10.3390/esa1010005
Ginzburg-Ganz E, Belikov J, Katzir L, Levron Y. Uses of the Popov Stability Criterion for Analyzing Global Asymptotic Stability in Power System Dynamic Models. Energy Storage and Applications. 2024; 1(1):54-72. https://doi.org/10.3390/esa1010005
Chicago/Turabian StyleGinzburg-Ganz, Elinor, Juri Belikov, Liran Katzir, and Yoash Levron. 2024. "Uses of the Popov Stability Criterion for Analyzing Global Asymptotic Stability in Power System Dynamic Models" Energy Storage and Applications 1, no. 1: 54-72. https://doi.org/10.3390/esa1010005
APA StyleGinzburg-Ganz, E., Belikov, J., Katzir, L., & Levron, Y. (2024). Uses of the Popov Stability Criterion for Analyzing Global Asymptotic Stability in Power System Dynamic Models. Energy Storage and Applications, 1(1), 54-72. https://doi.org/10.3390/esa1010005