
A Conceptual Design of Deployable Antenna Mechanisms

 ,
,
Abstract
1. Introduction
2. Materials and Methods
2.1. A Conceptual Design of the Deployable Antenna Mechanism
Working Principle
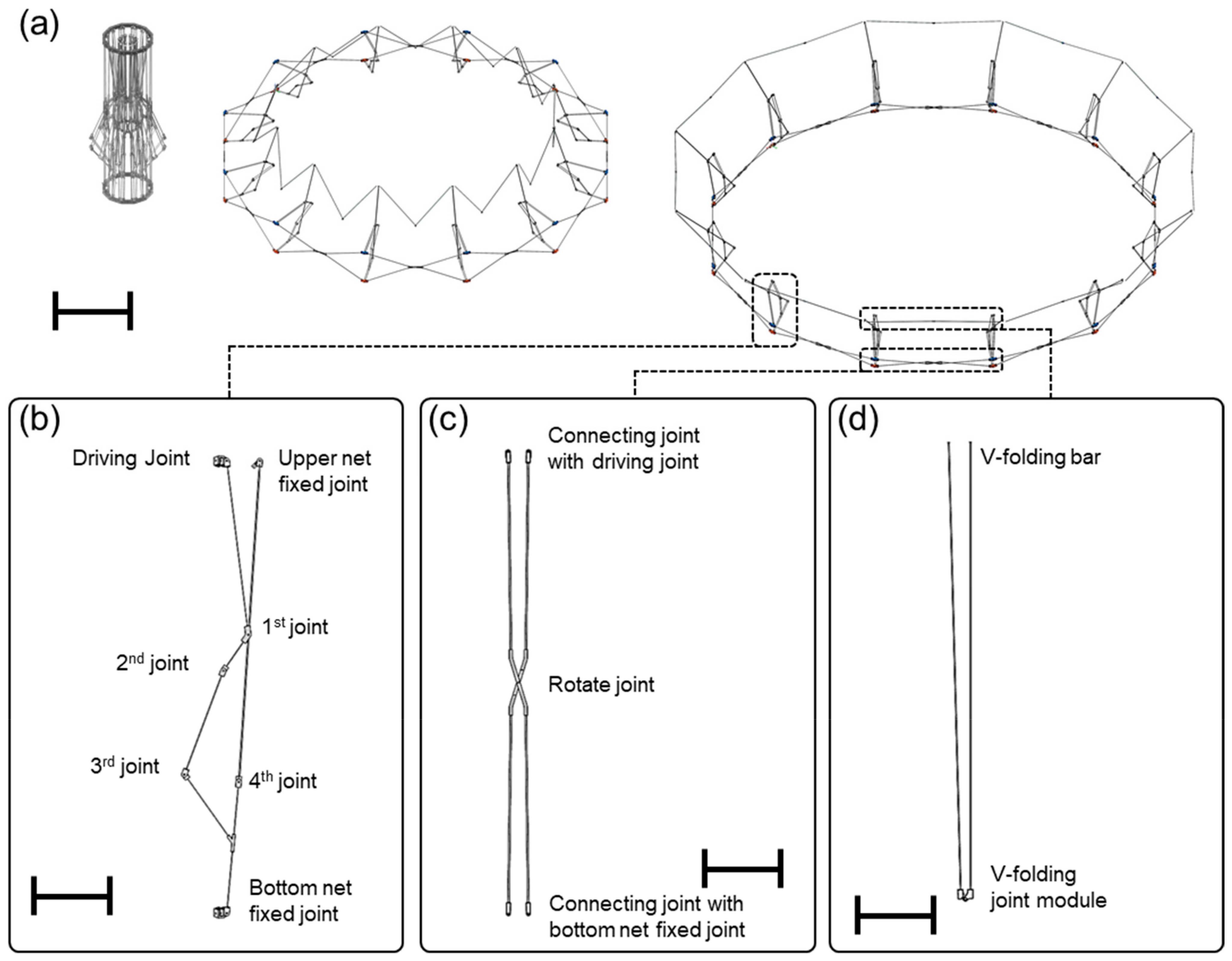
2.2. Hierarchical Composition—Twelve Bays Composed of Three Mecahnisms
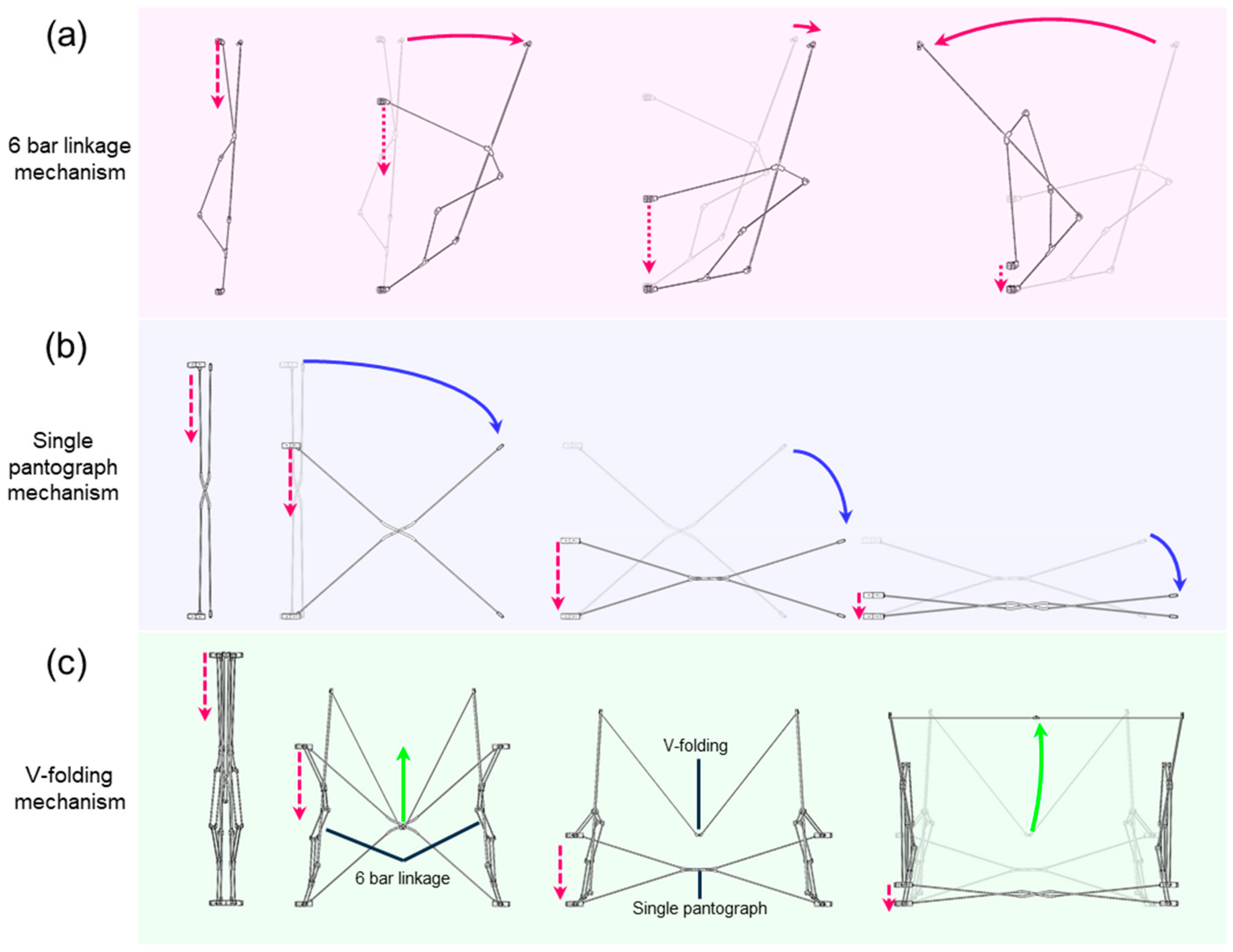
2.2.1. Six-Bar Linkage Mechanism
2.2.2. Single Pantograph Mechanism
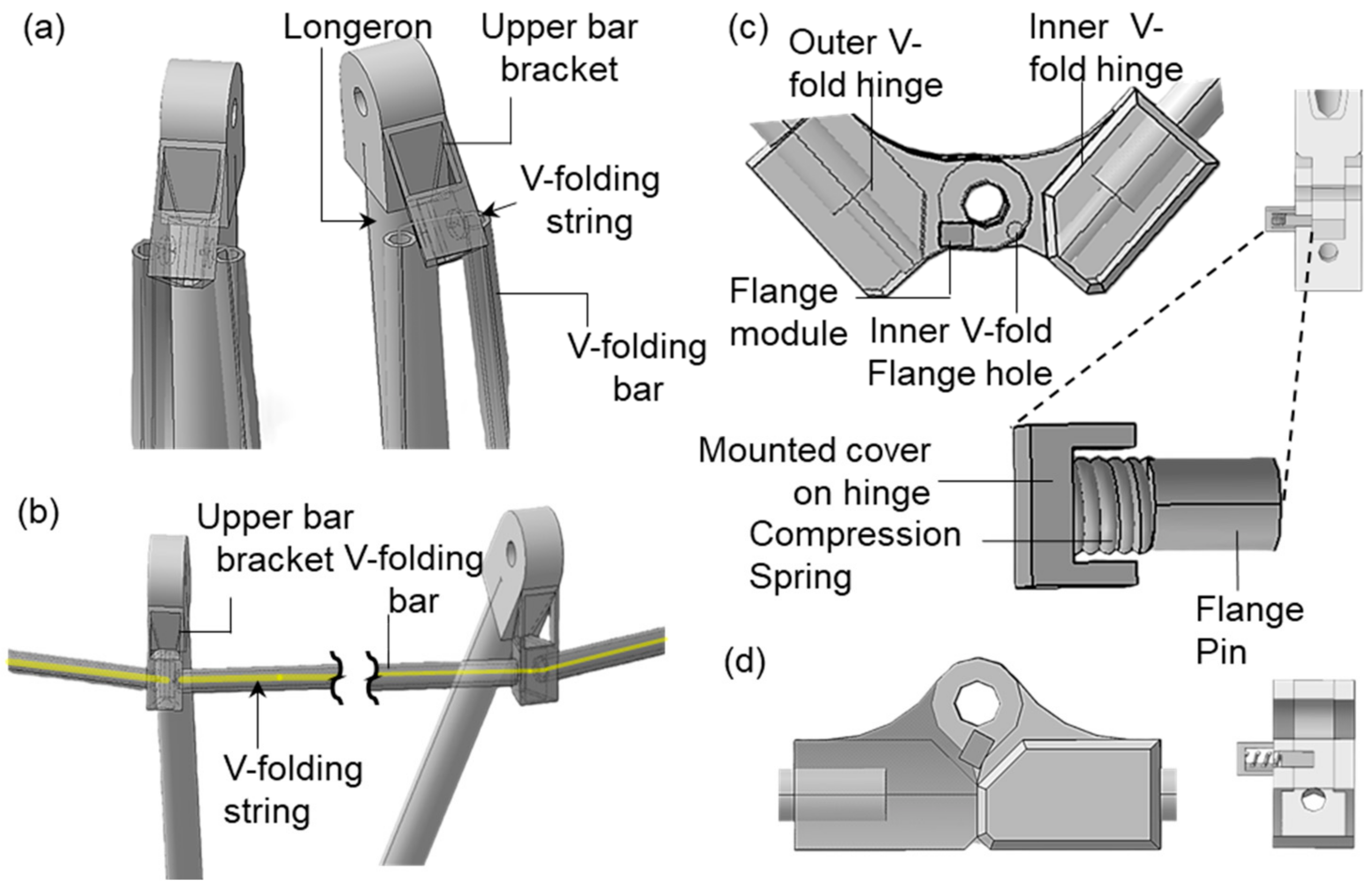
2.2.3. V-Folding Mechanism
2.3. Performance Metrics of the Deployable Antenna Mechanism
3. Results and Discussion
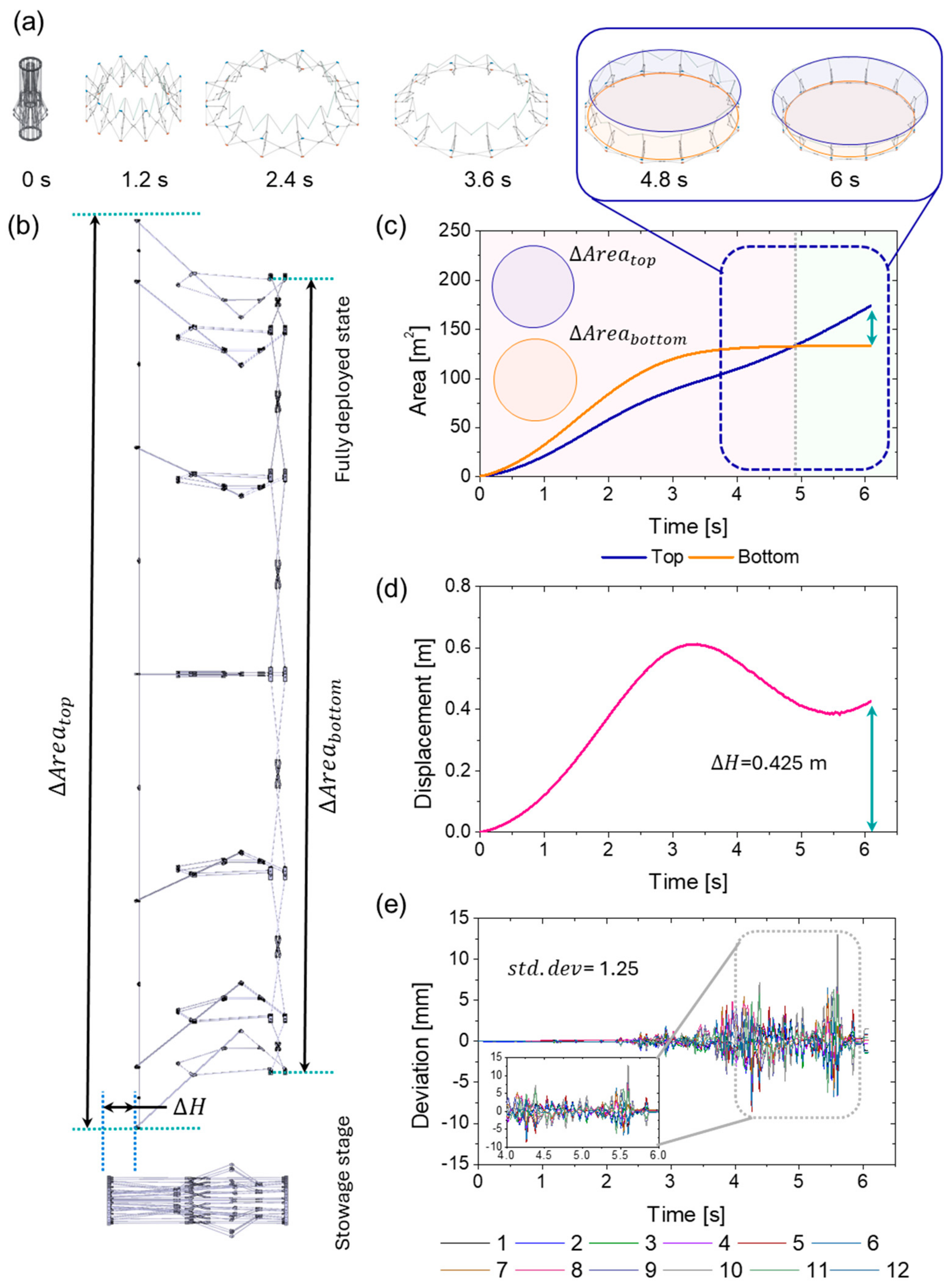
3.1. Dynamic Analysis of the Deployable Antenna Mechanism
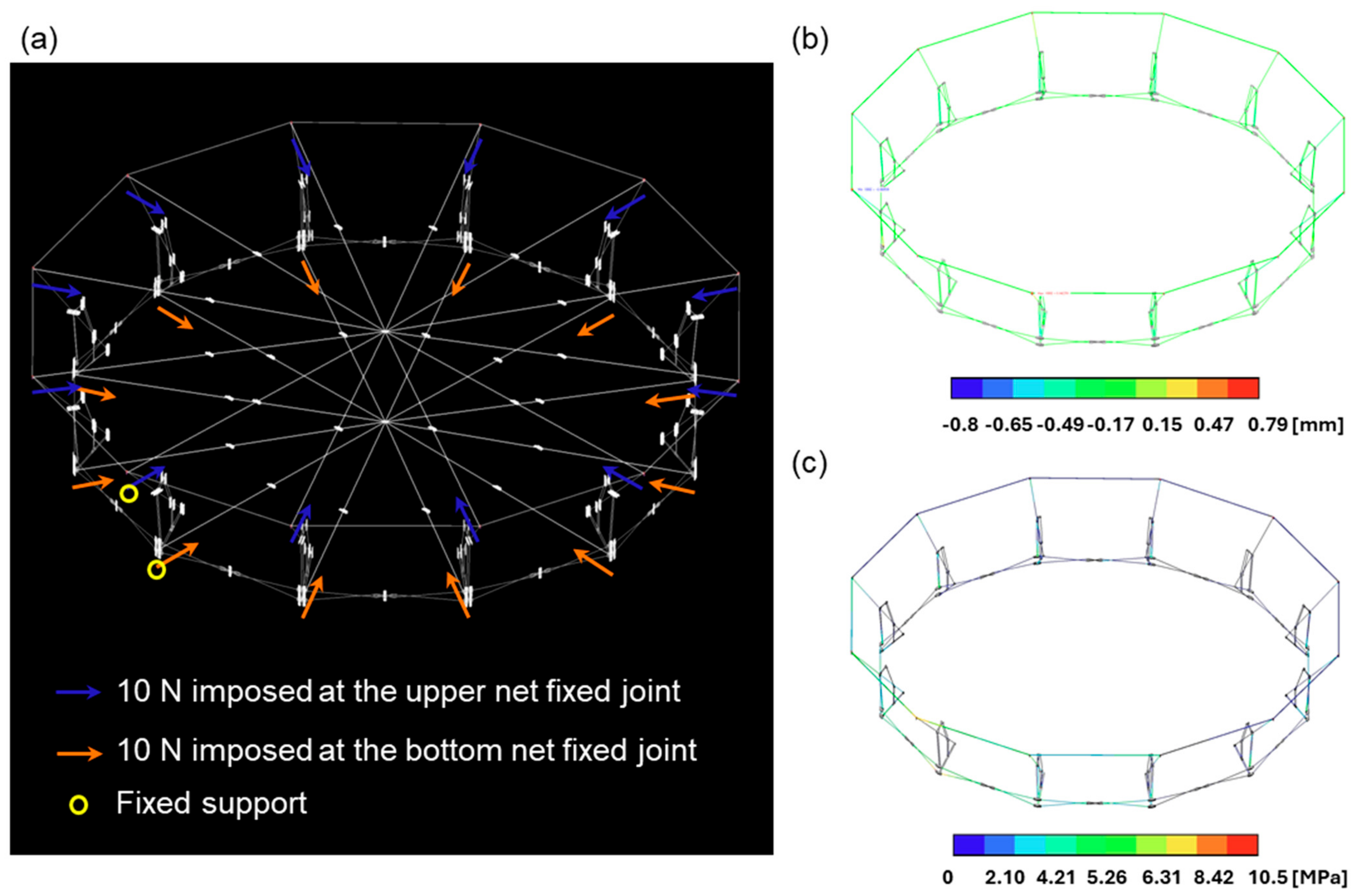
3.2. Static Analysis of the Deployable Antenna Mechanism
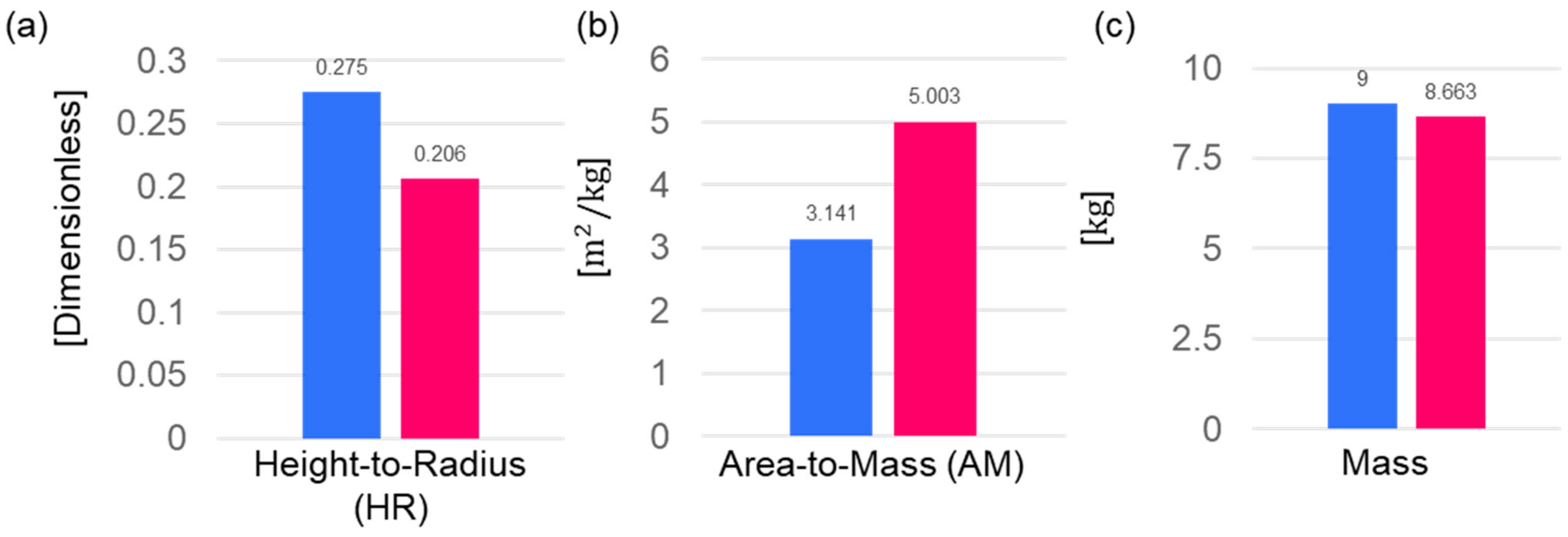
3.3. Comparatative Analysis; Double Pentograph Mechanism Versus Proposed Mechanism
4. Conclusions and Future Work
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

References
- Gao, S.; Clark, K.; Unwin, M.; Zackrisson, J.; Shiroma, W.; Akagi, J.; Maynard, K.; Garner, P.; Boccia, L.; Amendola, G. Antennas for modern small satellites. IEEE Antennas Propag. Mag. 2009, 51, 40–56. [Google Scholar] [CrossRef]
- Bayer, H.; Krauss, A.; Zaiczek, T.; Stephan, R.; Enge-Rosenblatt, O.; Hein, M.A. Ka-band user terminal antennas for satellite communications [antenna applications corner]. IEEE Antennas Propag. Mag. 2016, 58, 76–88. [Google Scholar] [CrossRef]
- Rahmat-Samii, Y.; Densmore, A.C. Technology trends and challenges of antennas for satellite communication systems. IEEE Trans. Antennas Propag. 2014, 63, 1191–1204. [Google Scholar] [CrossRef]
- Fu, W.; Ma, J.; Chen, P.; Chen, F. Remote sensing satellites for digital earth. In Manual of Digital Earth; Springer: Cham, Switzerland, 2020; pp. 55–123. [Google Scholar]
- Rovera, A.; Tancau, A.; Boetti, N.; Dalla Vedova, M.D.; Maggiore, P.; Janner, D. Fiber optic sensors for harsh and high radiation environments in aerospace applications. Sensors 2023, 23, 2512. [Google Scholar] [CrossRef] [PubMed]
- Raj, A.A.B.; Krishnan, P.; Darusalam, U.; Kaddoum, G.; Ghassemlooy, Z.; Abadi, M.M.; Majumdar, A.K.; Ijaz, M. A review–unguided optical communications: Developments, technology evolution, and challenges. Electronics 2023, 12, 1922. [Google Scholar] [CrossRef]
- Hansen, R.C. Fundamental limitations in antennas. Proc. IEEE 1981, 69, 170–182. [Google Scholar] [CrossRef]
- Lian, P.; Wang, C.; Xue, S.; Xu, Q.; Wang, N.; Xiang, B.; Shi, Y.; Jia, Y. Panel adjustment and error analysis for a large active main reflector antenna by using the panel adjustment matrix. IEEE Trans. Antennas Propag. 2021, 69, 6351–6363. [Google Scholar] [CrossRef]
- Munson, J.E. The impact of launch vehicle constraints on space system design. In Proceedings of the Massachusetts Institute of Technology, Cambridge, MA, USA, 18 November 2013. [Google Scholar]
- Nanjangud, A.; Underwood, C.; Rai, C.M.; Eckersley, S.; Sweeting, M.; Bianco, P. Towards robotic on-orbit assembly of large space telescopes: Mission architectures, concepts, and analyses. Acta Astronaut. 2024, 224, 379–396. [Google Scholar] [CrossRef]
- Kim, H.-G.; Kim, D.-G.; Do, R.-H.; Koo, K.-R.; Yu, Y.-J. Development of Deployable Reflector Antenna for the SAR-Satellite: Part 1. Design and Analysis of the Main Reflector Using Honeycomb Sandwich Composite Structure. Appl. Sci. 2024, 14, 1590. [Google Scholar] [CrossRef]
- Wang, B.; Zhu, J.; Zhong, S.; Liang, W.; Guan, C. Space deployable mechanics: A review of structures and smart driving. Mater. Des. 2023, 237, 112557. [Google Scholar] [CrossRef]
- Thomson, M.W. The AstroMesh deployable reflector. In Proceedings of the IEEE Antennas and Propagation Society International Symposium. 1999 Digest. Held in Conjunction with: USNC/URSI National Radio Science Meeting (Cat. No. 99CH37010), Orlando, FL, USA, 11–16 July 1999; pp. 1516–1519. [Google Scholar]
- Thomson, M. Astromesh deployable reflectors for ku and ka band commercial satellites. In Proceedings of the 20th AIAA International Communication Satellite Systems Conference and Exhibit, Montreal, QC, Canada, 12–15 May 2002; p. 2032. [Google Scholar]
- Chodimella, S.; Moore, J.; Otto, J.; Fang, H. Design evaluation of a large aperture deployable antenna. In Proceedings of the 47th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference 14th AIAA/ASME/AHS Adaptive Structures Conference 7t, Newport, RI, USA, 1–4 May 2006; p. 1603. [Google Scholar]
- Peng, Y.; Zhao, Z.; Zhou, M.; He, J.; Yang, J.; Xiao, Y. Flexible multibody model and the dynamics of the deployment of mesh antennas. J. Guid. Control. Dyn. 2017, 40, 1499–1510. [Google Scholar] [CrossRef]
- Hutchinson, R.G.; Fleck, N.A. The structural performance of the periodic truss. J. Mech. Phys. Solids 2006, 54, 756–782. [Google Scholar] [CrossRef]
- Kočvara, M. On the modelling and solving of the truss design problem with global stability constraints. Struct. Multidiscip. Optim. 2002, 23, 189–203. [Google Scholar] [CrossRef]
- Fu, K.; Zhao, Z.; Ren, G.; Xiao, Y.; Feng, T.; Yang, J.; Gasbarri, P. From multiscale modeling to design of synchronization mechanisms in mesh antennas. Acta Astronaut. 2019, 159, 156–165. [Google Scholar] [CrossRef]
- Thomas, G.R.; Fadick, C.M.; Fram, B.J. Launch vehicle payload adapter design with vibration isolation features. In Proceedings of the Smart Structures and Materials 2005: Damping and Isolation, San Diego, CA, USA, 7–10 March 2005; SPIE Press: Bellingham, WA, USA, 2005; pp. 35–45. [Google Scholar]
- Datashvili, L.; Endler, S.; Wei, B.; Baier, H.; Langer, H.; Friemel, M.; Tsignadze, N.; Santiago-Prowald, J. Study of mechanical architectures of large deployable space antenna apertures: From design to tests. CEAS Space J. 2013, 5, 169–184. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Materials | Density [g/cm3] | Elastic Modulus [GPa] | Poisson’s Ratio | Shear Strength [MPa] | Tensile Strength [MPa] |
|---|---|---|---|---|---|
| CFRP T-300 | 1.6 | 240 | 0.25 | 40 | 3400 |
| AL6061 | 2.7 | 68.9 | 0.33 | 207 | 276 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, H.; Hwang, B.; Kim, S.; Lee, H.; Koo, K.; Joe, S.; Kim, B. A Conceptual Design of Deployable Antenna Mechanisms. Aerospace 2024, 11, 938. https://doi.org/10.3390/aerospace11110938
Kang H, Hwang B, Kim S, Lee H, Koo K, Joe S, Kim B. A Conceptual Design of Deployable Antenna Mechanisms. Aerospace. 2024; 11(11):938. https://doi.org/10.3390/aerospace11110938
Chicago/Turabian StyleKang, Hyeongseok, Bohyun Hwang, Sooyoung Kim, Hyeonseok Lee, Kyungrae Koo, Seonggun Joe, and Byungkyu Kim. 2024. "A Conceptual Design of Deployable Antenna Mechanisms" Aerospace 11, no. 11: 938. https://doi.org/10.3390/aerospace11110938
APA StyleKang, H., Hwang, B., Kim, S., Lee, H., Koo, K., Joe, S., & Kim, B. (2024). A Conceptual Design of Deployable Antenna Mechanisms. Aerospace, 11(11), 938. https://doi.org/10.3390/aerospace11110938