Vessel Traffic Risk Assessment Based on Uncertainty Analysis in the Risk Matrix

Abstract
1. Introduction
2. Algorithm for Uncertainty Analysis
2.1. The Aleatory Uncertainty Quantification
2.2. The Epistemic Uncertainty Quantification
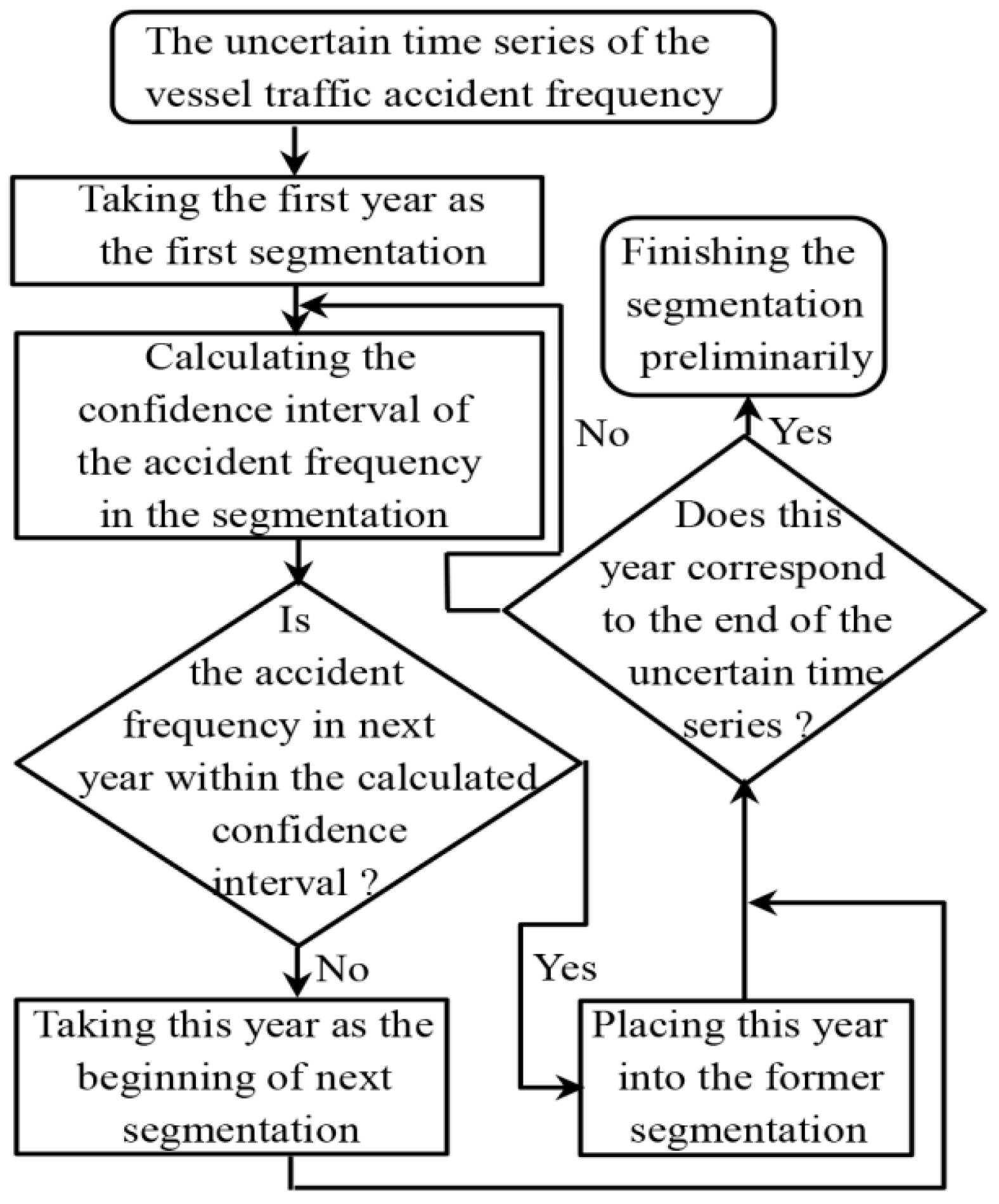
3. Algorithm for Time Window Selection
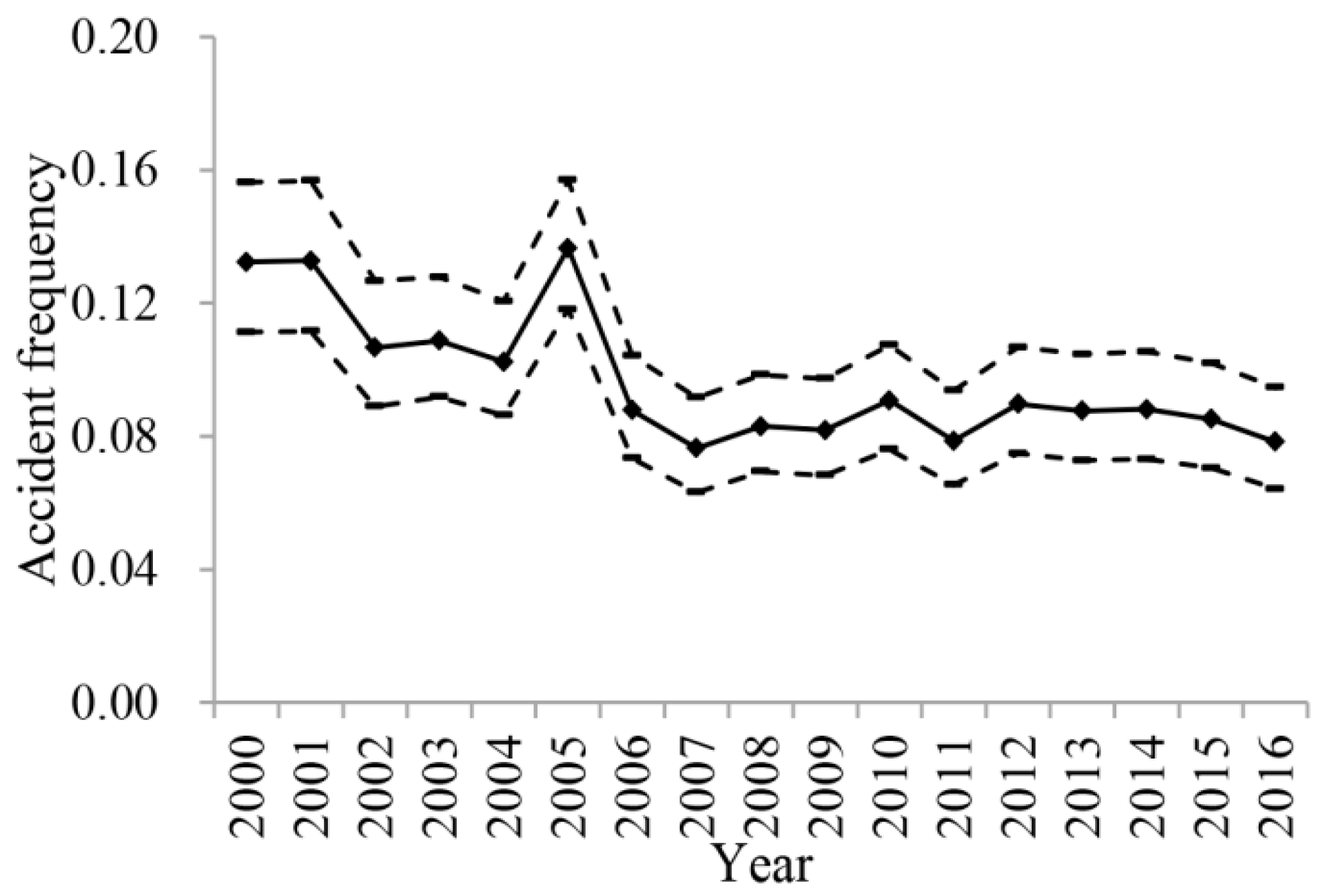
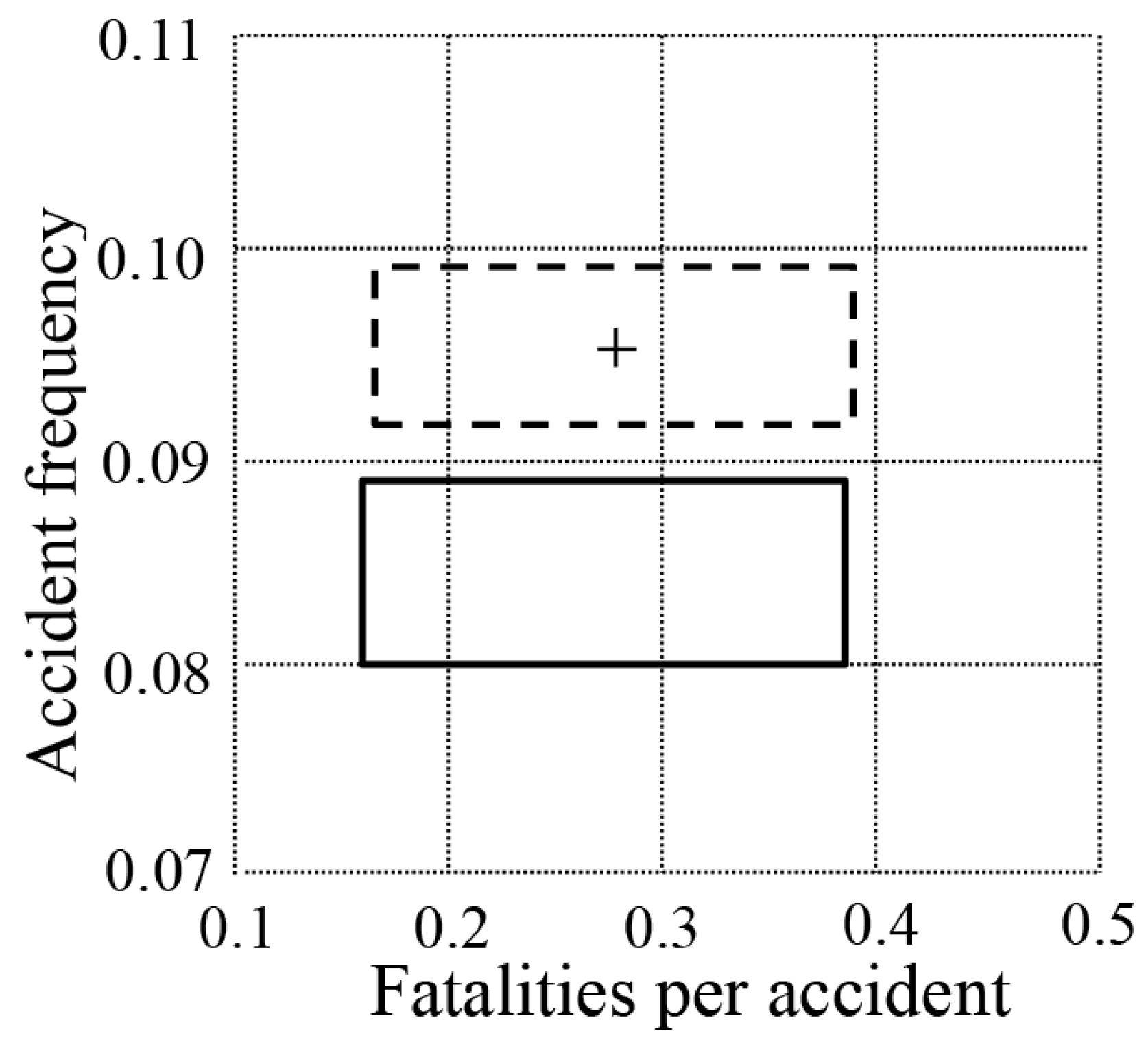
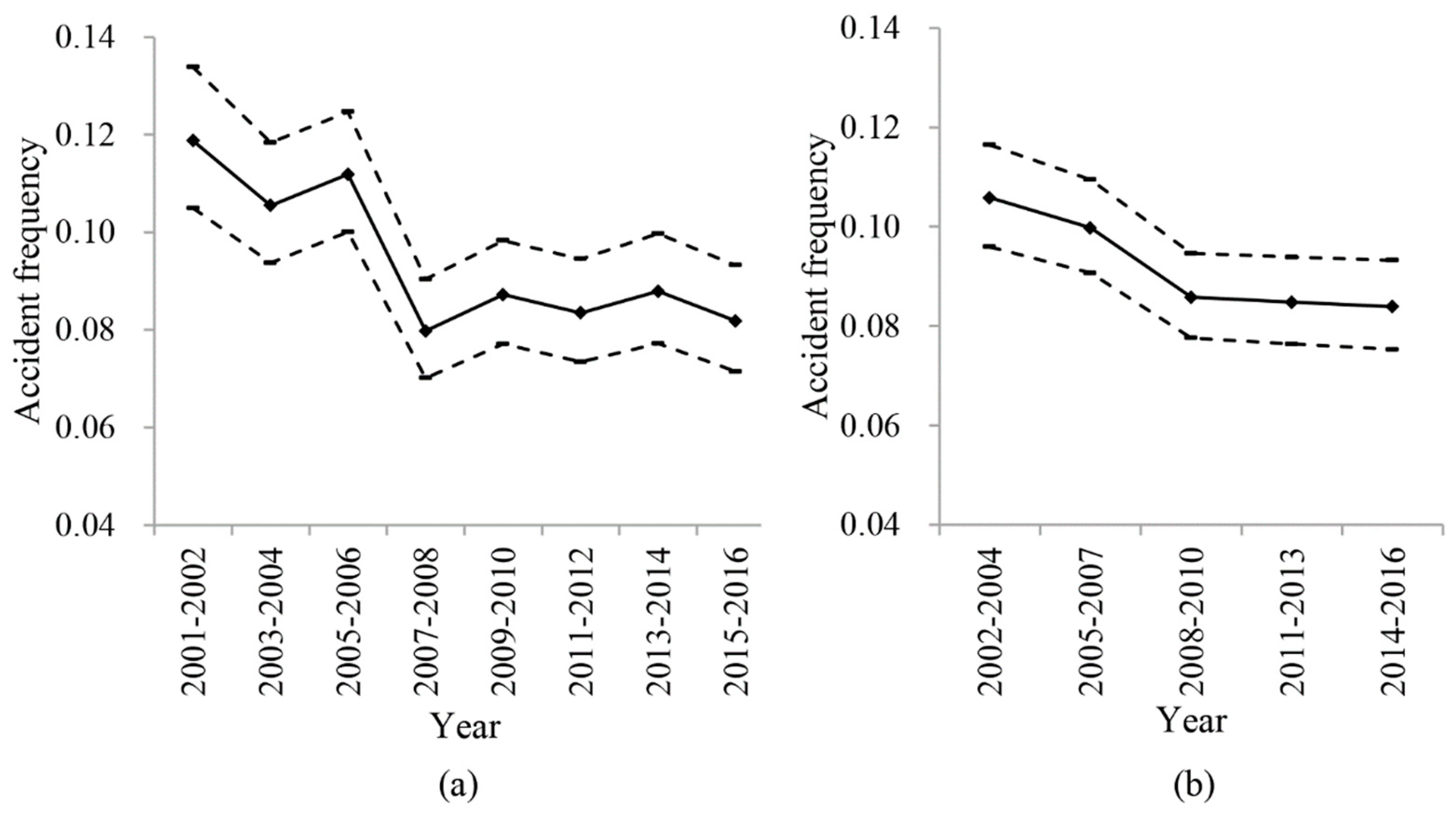
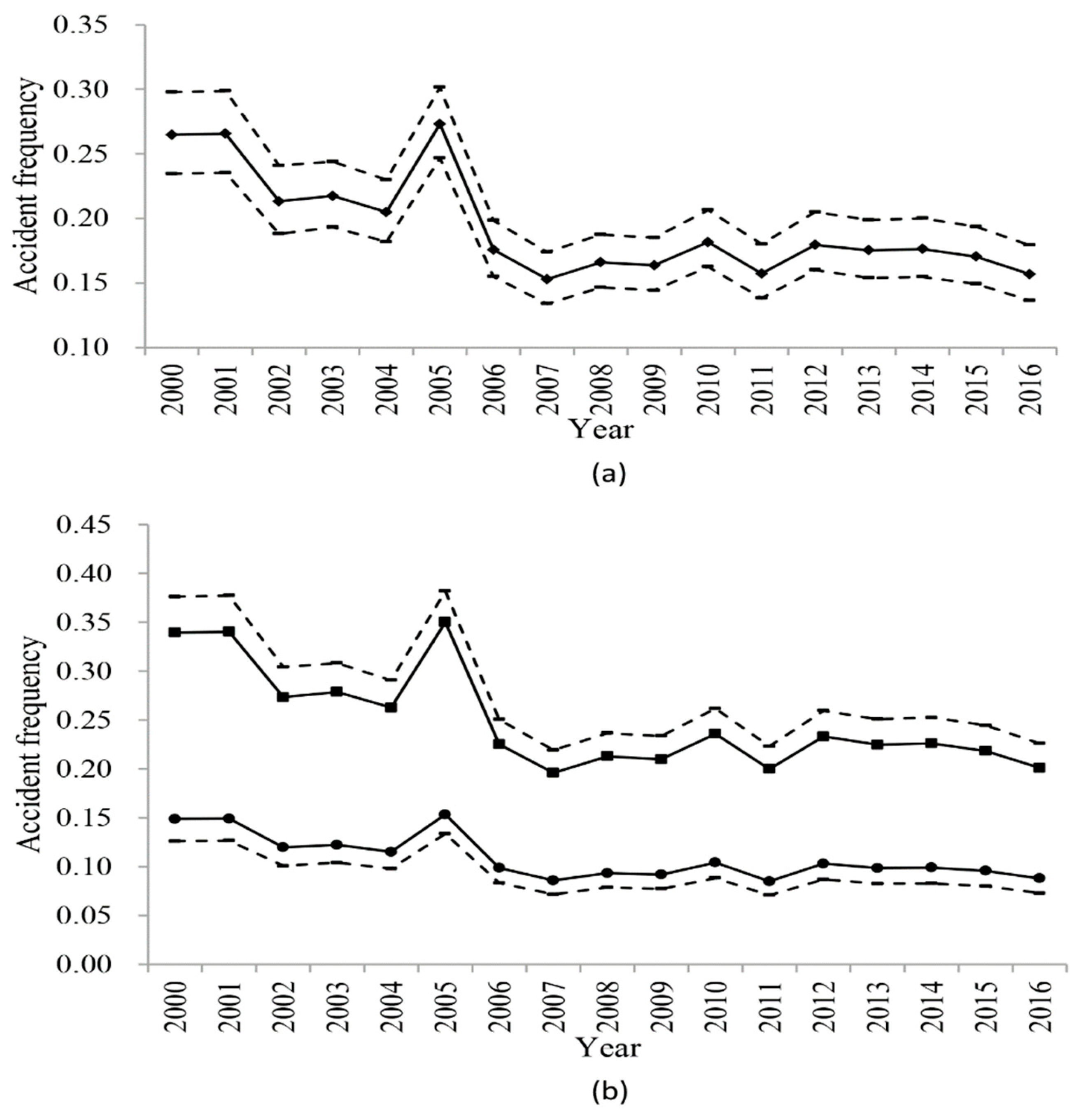
4. Results
5. Discussion
5.1. The Selection of the Vessel Traffic Accident Frequency as the Index
5.2. The Epistemic Uncertainty of Selecting One Year of Data as a Basis
5.3. Underreporting of Vessel Traffic Accidents
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- International Maritime Organization (IMO). Revised Guidelines for Formal Safety Assessment (FSA) for Use in the IMO Rule-Making Process. 2013. Available online: http://research.dnv.com/skj/IMO/MSC-MEPC%202_Circ%2012%20FSA%20Guidelines%20Rev%20III.pdf (accessed on 2 April 2018).
- Endrina, N.; Rasero, J.C.; Konovessis, D. Risk analysis for RoPax vessels: A case of study for the Strait of Gibraltar. Ocean Eng. 2018, 151, 141–151. [Google Scholar] [CrossRef]
- Duijm, N.J. Recommendations on the use and design of risk matrices. Saf. Sci. 2015, 76, 21–31. [Google Scholar] [CrossRef]
- Aven, T. Improving risk characterisations in practical situations by highlighting knowledge aspects, with applications to risk matrices. Reliab. Eng. Syst. Saf. 2017, 167, 42–48. [Google Scholar] [CrossRef]
- Goerlandt, F.; Reniers, G. On the assessment of uncertainty in risk diagrams. Saf. Sci. 2016, 84, 67–77. [Google Scholar] [CrossRef]
- Li, S.; Meng, Q.; Qu, X. An overview of maritime waterway quantitative risk assessment models. Risk Anal. 2012, 32, 496–512. [Google Scholar] [CrossRef] [PubMed]
- Goerlandt, F.; Montewka, J. Maritime transportation risk analysis: Review and analysis in light of some foundational issues. Reliab. Eng. Syst. Saf. 2015, 138, 115–134. [Google Scholar] [CrossRef]
- Lim, G.J.; Cho, J.; Bora, S.; Biobaku, T.; Parsaei, H. Models and computational algorithms for maritime risk analysis: A review. Ann. Oper. Res. 2018, 265, 1–22. [Google Scholar] [CrossRef]
- Fernandes, R.; Braunschweig, F.; Lourenco, F.; Neves, R. Combining operational models and data into a dynamic vessel risk assessment tool for coastal regions. Ocean Sci. 2016, 12, 285–317. [Google Scholar] [CrossRef]
- Dong, Y.; Frangopol, D.M. Probabilistic ship collision risk and sustainability assessment considering risk attitudes. Struct. Saf. 2015, 53, 75–84. [Google Scholar] [CrossRef]
- Goerlandt, F.; Kujala, P. On the reliability and validity of ship-ship collision risk analysis in light of different perspectives on risk. Saf. Sci. 2014, 62, 348–365. [Google Scholar] [CrossRef]
- Montewka, J.; Goerlandt, F.; Kujala, P. On a systematic perspective on risk for formal safety assessment (FSA). Reliab. Eng. Syst. Saf. 2014, 127, 77–85. [Google Scholar] [CrossRef]
- Sormunen, O.V.E.; Goerlandt, F.; Häkkinen, J.; Posti, A.; Hänninen, M.; Montewka, J.; Ståhlberg, K.; Kujala, P. Uncertainty in maritime risk analysis: Extended case study on chemical tanker collisions. P. I. Mech. Eng. M-J. Eng. 2015, 229, 303–320. [Google Scholar] [CrossRef]
- Merrick, J.R.W.; Van Dorp, R. Speaking the truth in maritime risk assessment. Risk Anal. 2006, 26, 223–237. [Google Scholar] [CrossRef] [PubMed]
- Baraldi, P.; Zio, E. A combined Monte Carlo and possibilistic approach to uncertainty propagation. Risk Anal. 2008, 28, 1309–1325. [Google Scholar] [CrossRef] [PubMed]
- Zhao, J.; Lv, J. Comparing prediction methods for maritime accidents. Transp. Plan. Technol. 2016, 39, 813–825. [Google Scholar] [CrossRef]
- International Maritime Organization (IMO). Formal Safety Assessment: FSA-Cruise Ships. 2008. Available online: http://www.safedor.org/resources/MSC_85-INF-2.pdf (accessed on 2 April 2018).
- European Maritime Safety Agency (EMSA). Risk Acceptance Criteria and Risk Based Damage Stability, Final Report, Part 2: Formal Safety Assessment. 2015. Available online: http://emsa.europa.eu/publications/technical-reports-studies-and-plans.html (accessed on 10 February 2018).
- Sankararaman, S.; Mahadevan, S. Separating the contributions of variability and parameter uncertainty in probability distributions. Reliab. Eng. Syst. Saf. 2013, 112, 187–199. [Google Scholar] [CrossRef]
- Talavera, A.; Aguasca, R.; Galvan, B.; Cacereno, A. Application of Dempster-Shafer theory for the quantification and propagation of uncertainty caused by the use of AIS data. Reliab. Eng. Syst. Saf. 2013, 111, 95–105. [Google Scholar] [CrossRef]
- Rohmer, J.; Baudrit, C. The use of the possibility theory to investigate the epistemic uncertainties within scenario-based earthquake risk assessments. Nat. Hazards 2011, 56, 613–632. [Google Scholar] [CrossRef]
- Fang, T.T.; Lahdelma, R. Optimization of combined heat and power production with heat storage based on sliding time window method. Appl. Energy 2016, 162, 723–732. [Google Scholar] [CrossRef]
- Haapasaari, P.; Helle, I.; Lehikoinen, A.; Lappalainen, J.; Kuikka, S. A proactive approach for maritime safety policy making for the Gulf of Finland: Seeking best practices. Mar. Policy 2015, 60, 107–118. [Google Scholar] [CrossRef]
- Yu, Y.F.; Zhu, Y.L.; Li, S.J.; Wan, D.S. Time series outlier detection based on sliding window prediction. Math. Probl. Eng. 2014, 2014, 1–14. [Google Scholar] [CrossRef]
- Krishnamoorthy, K.; Peng, J.; Zhang, D. Modified large sample confidence intervals for Poisson distributions: Ratio, weighted average, and product of means. Commun. Stat.-Theory Methods 2016, 45, 83–97. [Google Scholar] [CrossRef]
- Andre, J.C.S.; Lopes, D.R. On the use of possibility theory in uncertainty analysis of life cycle inventory. Int. J. Life Cycle Assess. 2012, 17, 350–361. [Google Scholar] [CrossRef]
- Wang, W.; Liu, G.; Liu, D. Chebyshev similarity match between uncertain time series. Math. Probl. Eng. 2015, 5, 1–13. [Google Scholar] [CrossRef]
- Marine Accident Investigation Branch (MAIB). MAIB Annual Report 2016. Available online: https://www.gov.uk/government/publications/maib-annual-report-2016 (accessed on 23 January 2018).
- Wang, S.; Huang, G.H.; Baetz, B.W.; Huang, W. Probabilistic inference coupled with possibilistic reasoning for robust estimation of hydrologic parameters and piecewise characterization of interactive uncertainties. J. Hydrometeorol. 2016, 17, 1243–1260. [Google Scholar] [CrossRef]
- Sormunen, O.V.; Hänninen, M.; Kujala, P. Marine traffic, accidents, and underreporting in the Baltic Sea. Sci. J.-Marit. Univ. Szczec. 2016, 46, 163–177. [Google Scholar] [CrossRef]
- Psarros, G.; Skjong, R.; Eide, M.S. Under-reporting of maritime accidents. Accid. Anal. Prev. 2010, 42, 619–625. [Google Scholar] [CrossRef] [PubMed]
- Hassel, M.; Asbjørnslett, B.E.; Hole, L.P. Underreporting of maritime accidents to vessel accident databases. Accid. Anal. Prev. 2011, 43, 2053–2063. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | 2000 | 2001 | 2002 | 2003 | 2004 | 2005 | 2006 | 2007 | 2008 |
| Number of vessels | 1050 | 1047 | 1210 | 1343 | 1406 | 1443 | 1480 | 1518 | 1578 |
| Number of vessel traffic accidents | 139 | 139 | 129 | 146 | 144 | 197 | 130 | 116 | 131 |
| Number of fatalities | 48 | 47 | 48 | 50 | 49 | 38 | 38 | 46 | 46 |
| Year | 2009 | 2010 | 2011 | 2012 | 2013 | 2014 | 2015 | 2016 | |
| Number of vessels | 1564 | 1520 | 1521 | 1450 | 1392 | 1361 | 1385 | 1365 | |
| Number of vessel traffic accidents | 128 | 141 | 115 | 133 | 122 | 120 | 118 | 107 | |
| Number of fatalities | 38 | 36 | 35 | 26 | 19 | 21 | 23 | 21 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, M.; Zheng, Z. Vessel Traffic Risk Assessment Based on Uncertainty Analysis in the Risk Matrix. Algorithms 2018, 11, 60. https://doi.org/10.3390/a11050060
Sun M, Zheng Z. Vessel Traffic Risk Assessment Based on Uncertainty Analysis in the Risk Matrix. Algorithms. 2018; 11(5):60. https://doi.org/10.3390/a11050060
Chicago/Turabian StyleSun, Molin, and Zhongyi Zheng. 2018. "Vessel Traffic Risk Assessment Based on Uncertainty Analysis in the Risk Matrix" Algorithms 11, no. 5: 60. https://doi.org/10.3390/a11050060
APA StyleSun, M., & Zheng, Z. (2018). Vessel Traffic Risk Assessment Based on Uncertainty Analysis in the Risk Matrix. Algorithms, 11(5), 60. https://doi.org/10.3390/a11050060