
Image Segmentation of the Sudd Wetlands in South Sudan for Environmental Analytics by GRASS GIS Scripts


Abstract
:1. Introduction
1.1. Background
1.2. Current Research Status
1.3. Examples of Tools and Software
1.4. Research Goals and Gaps
1.5. Motivation
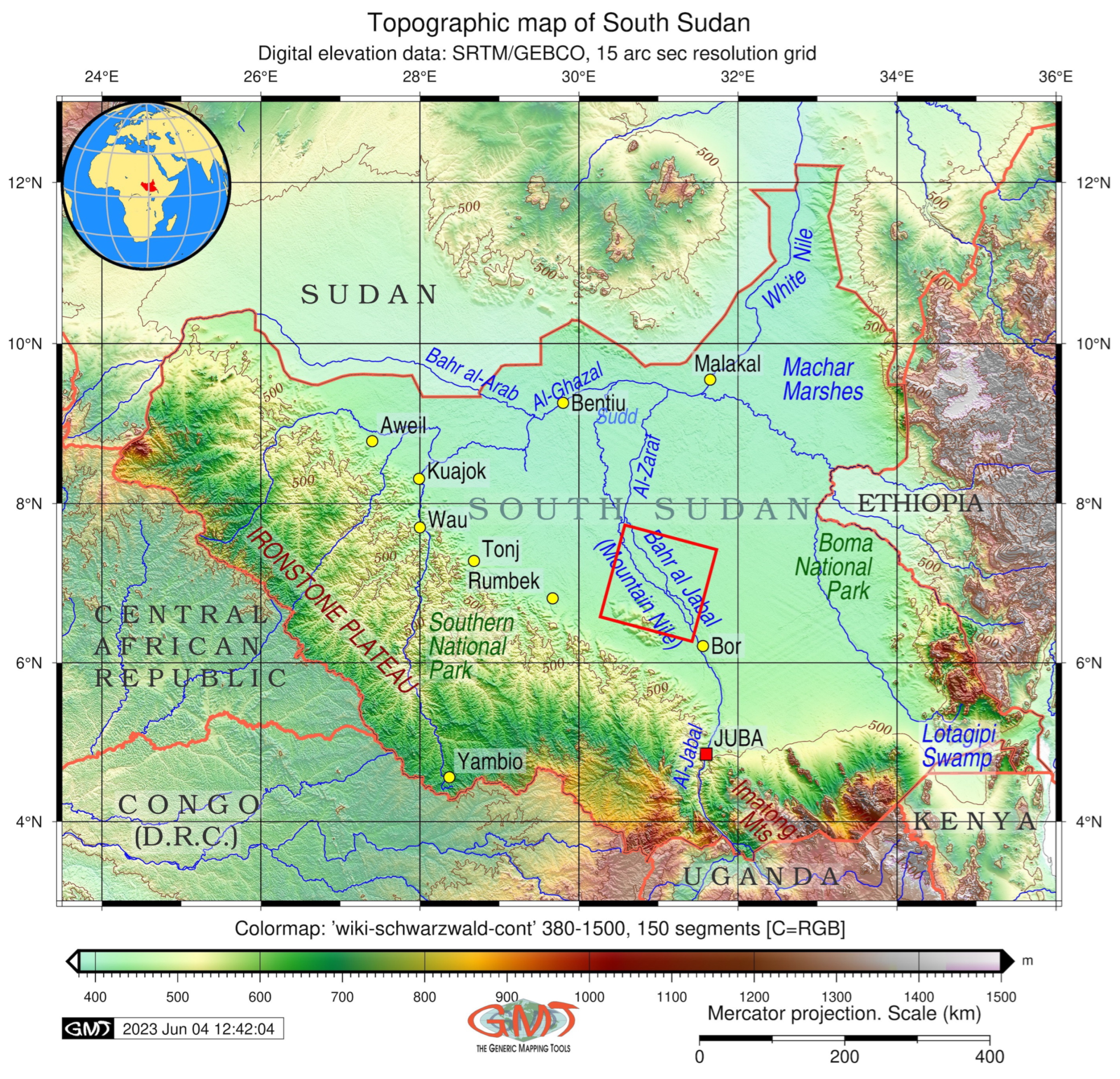
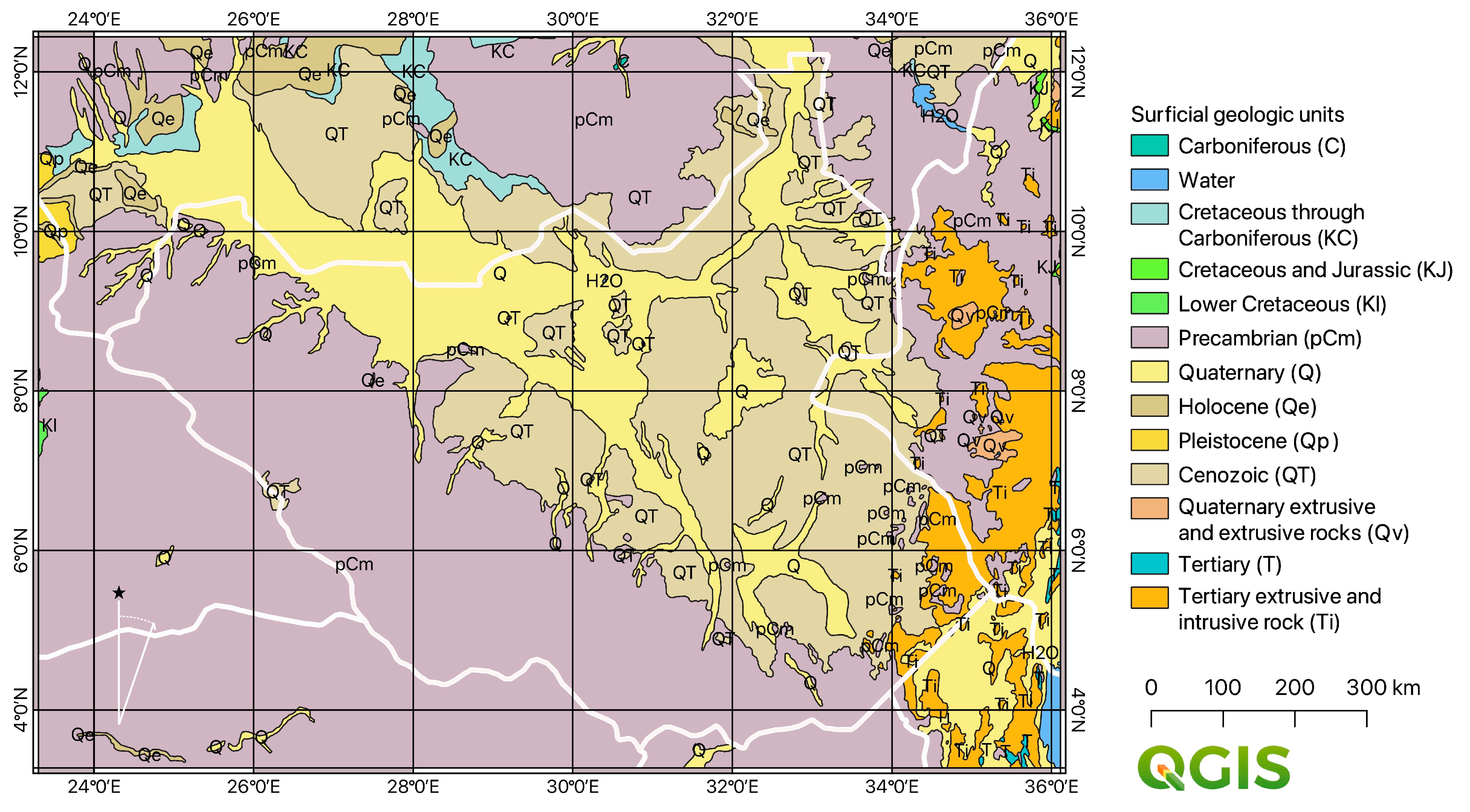
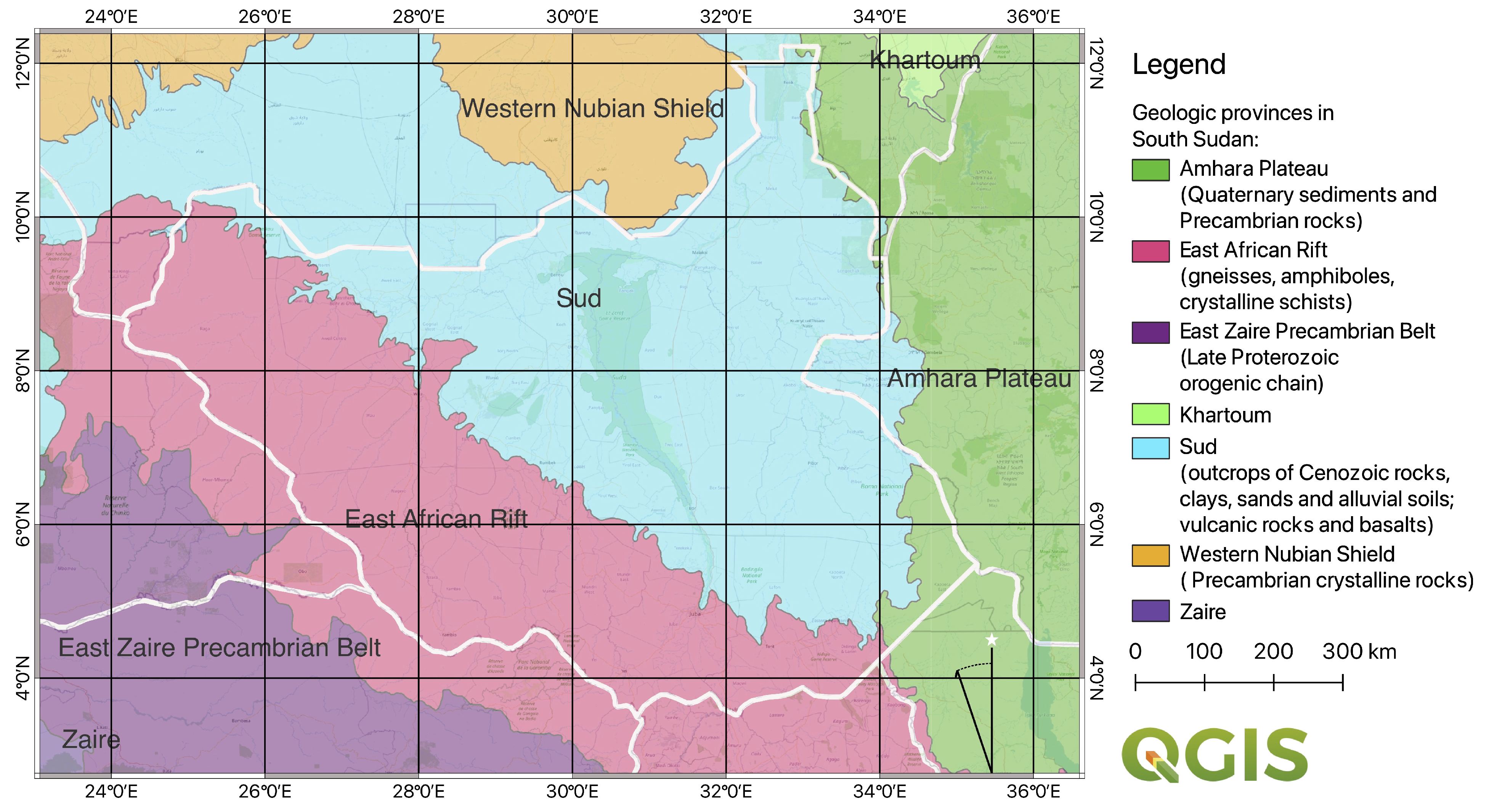
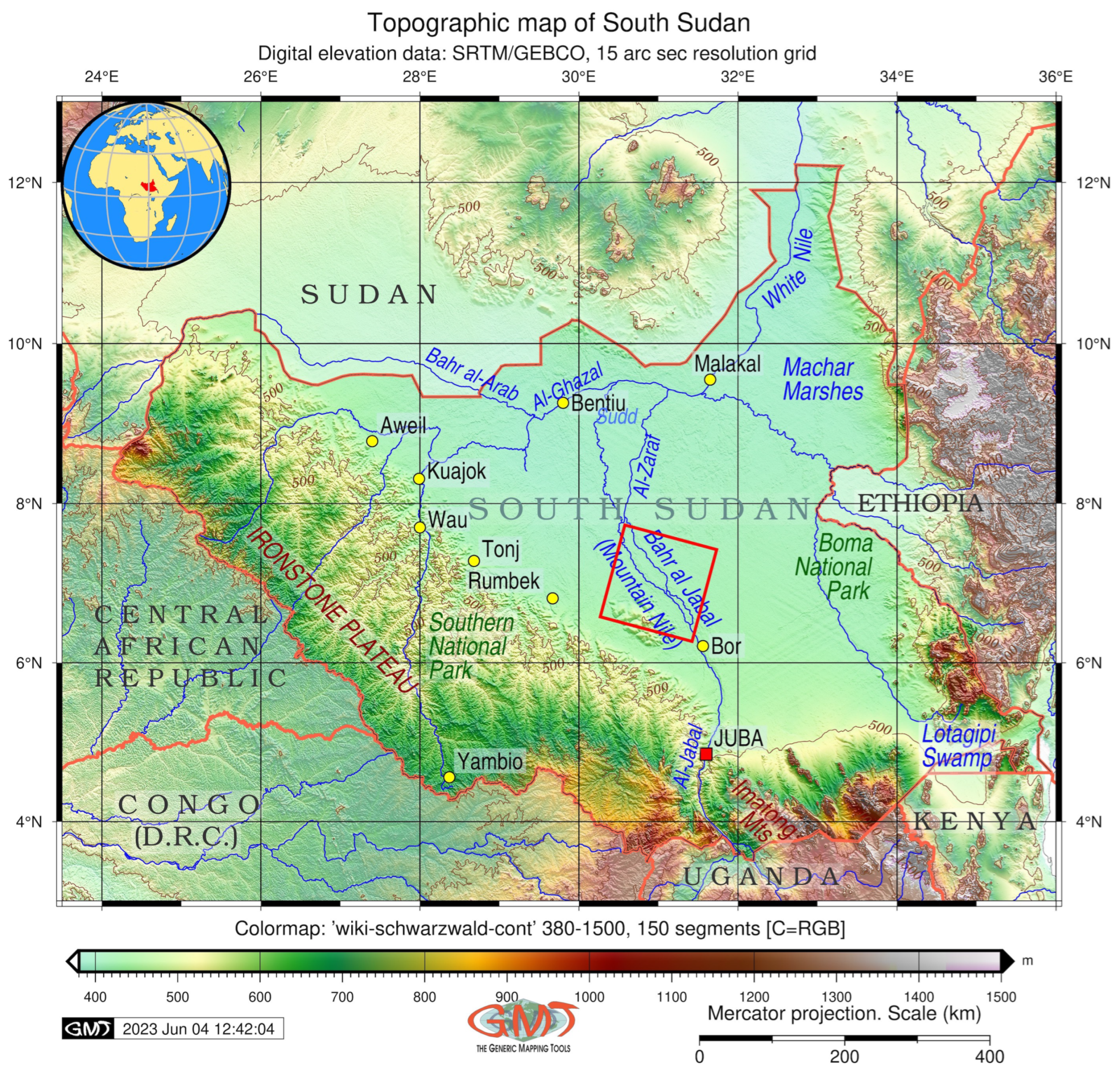
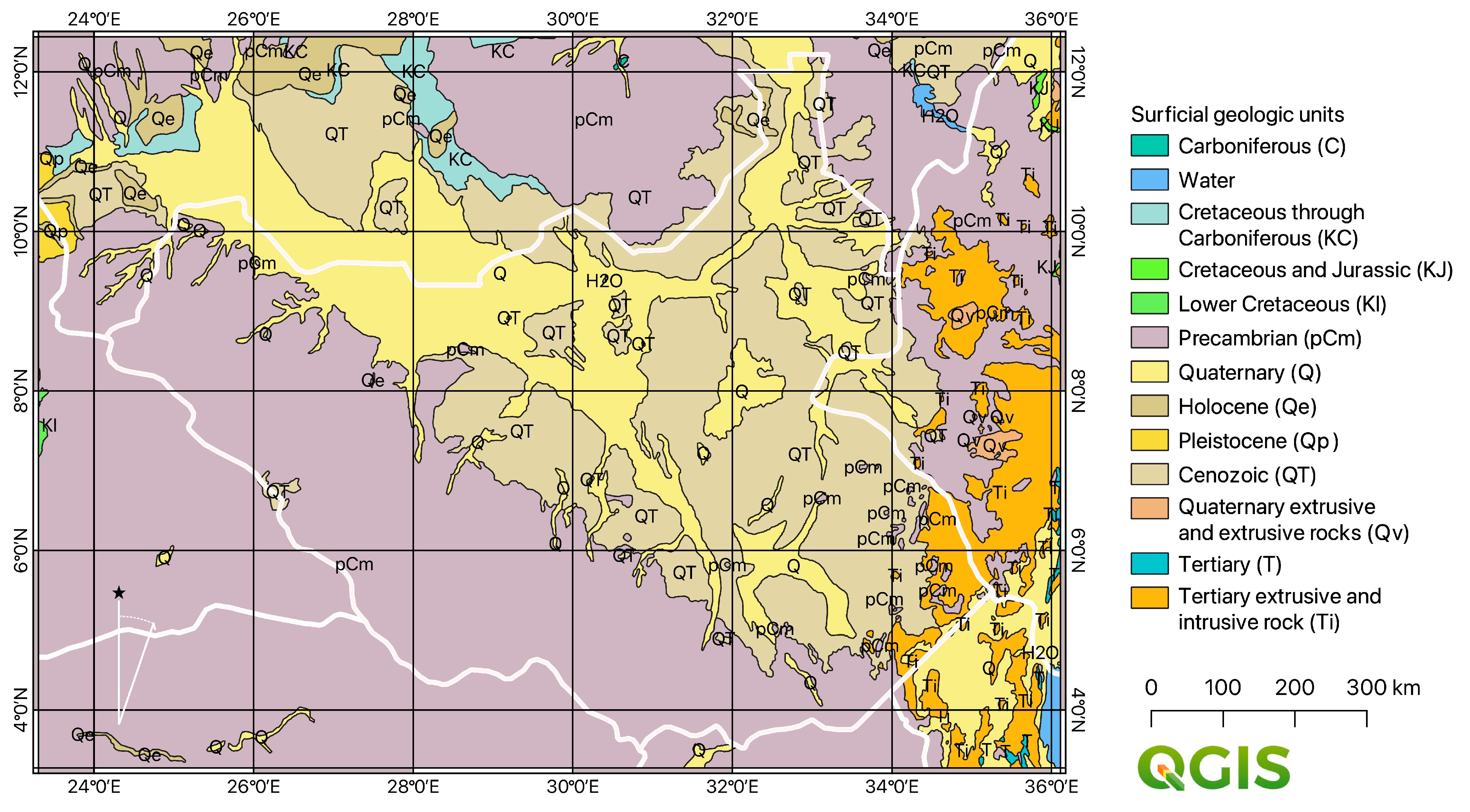
2. Characterisation of Study Area
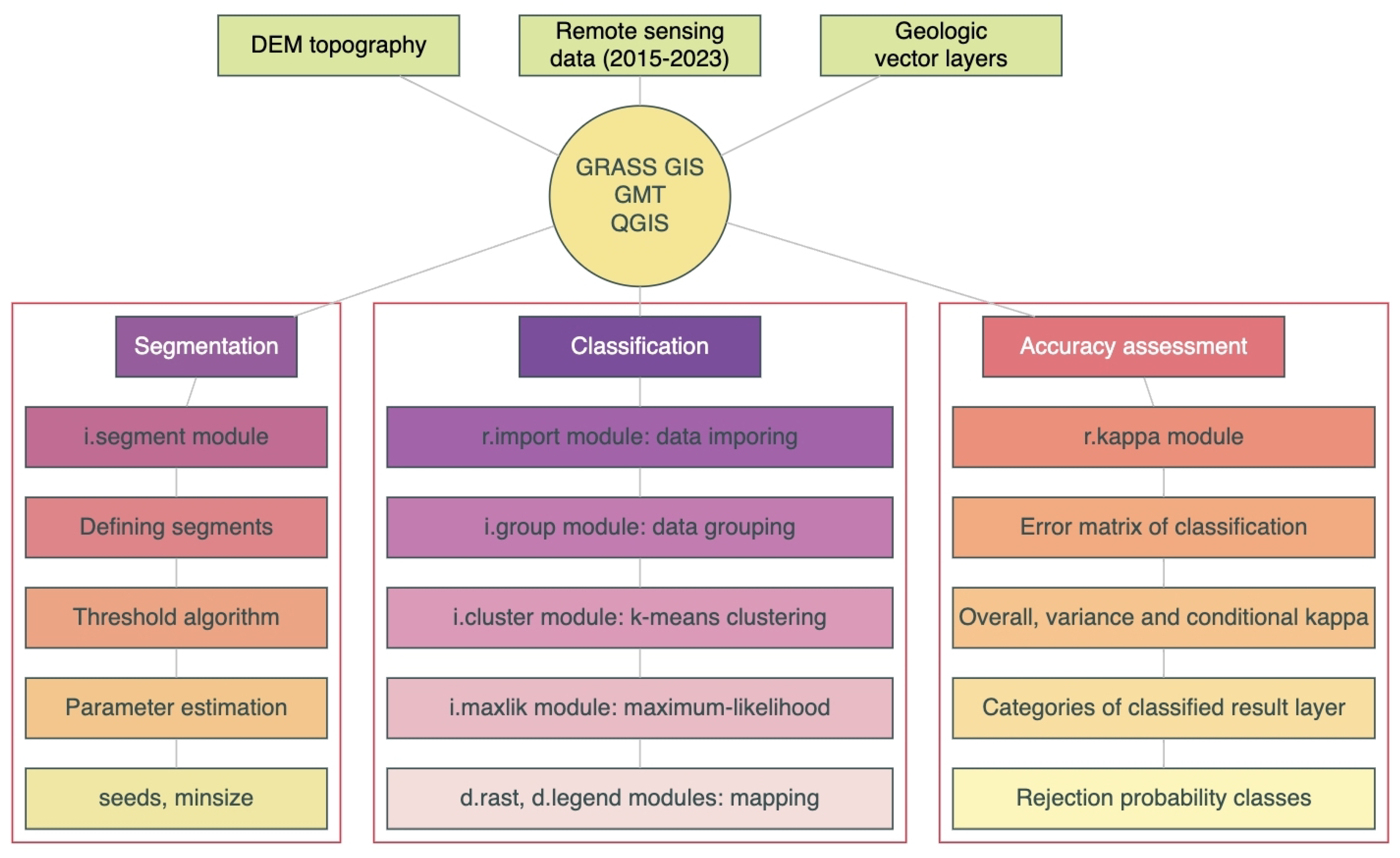
3. Materials and Methods
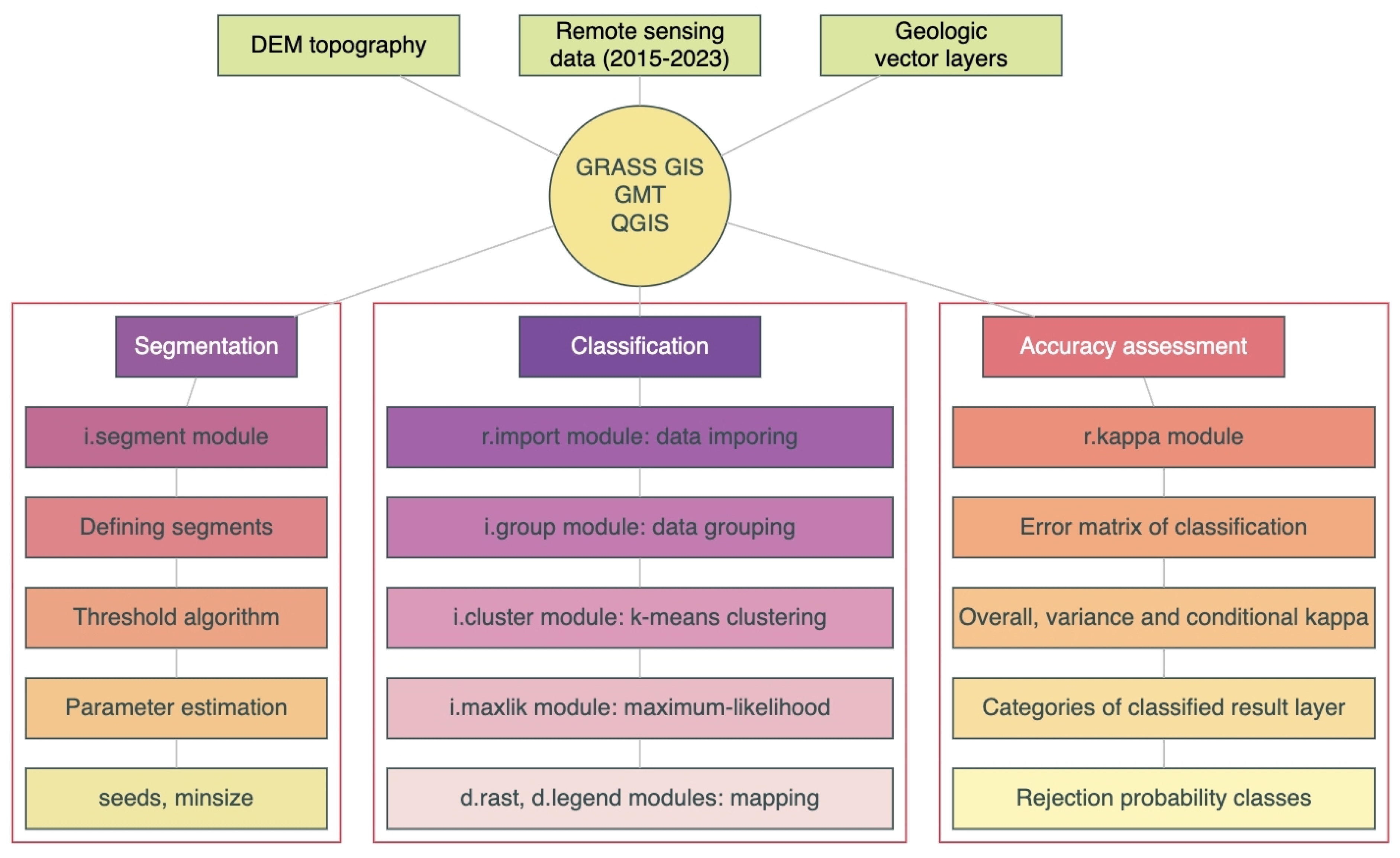
3.1. Software and Tools
3.2. Data Collection and Import
3.3. Data Preprocessing
3.4. Metadata and Extent
3.5. Defining Segments
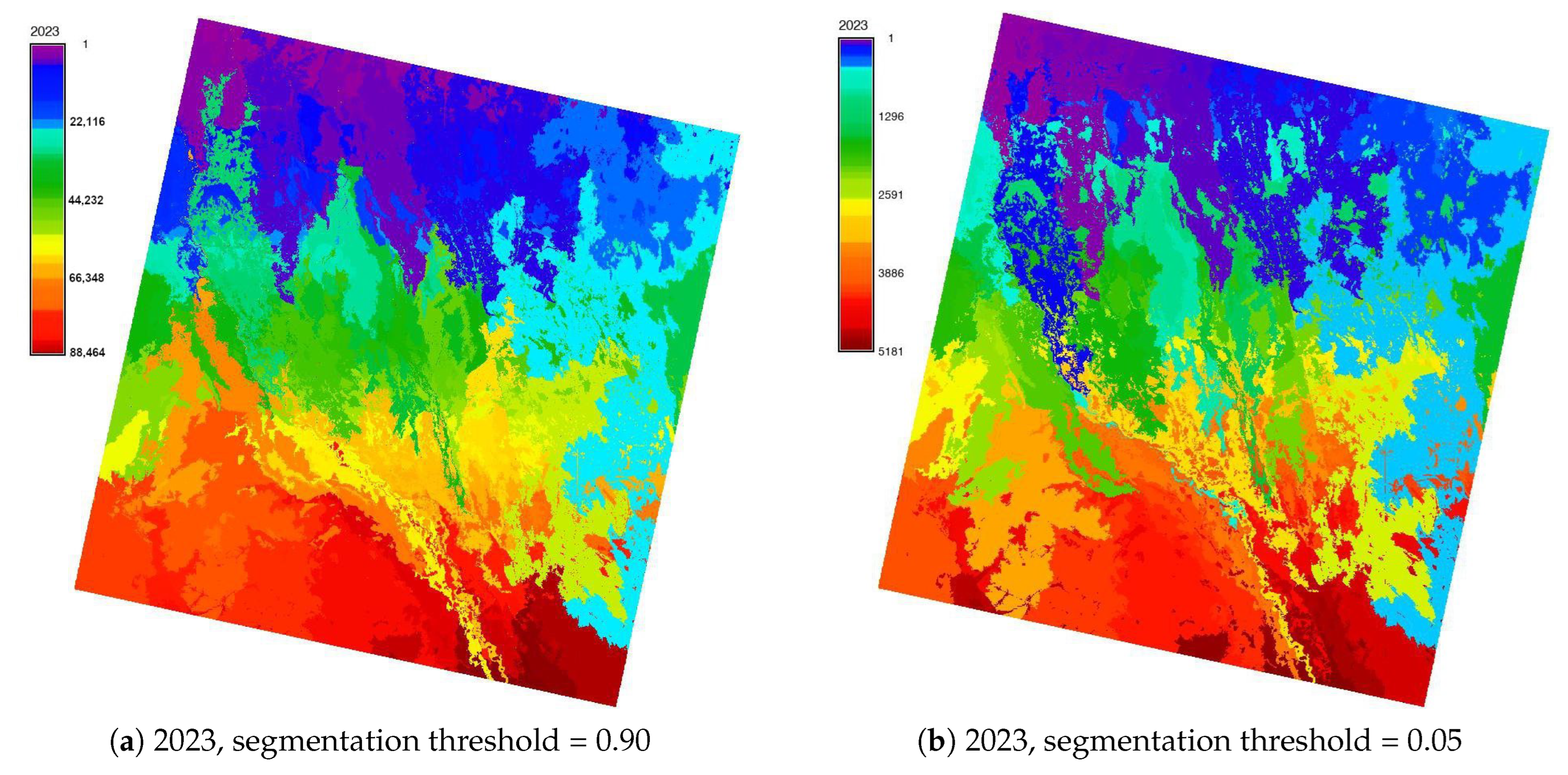
3.6. Threshold Algorithm
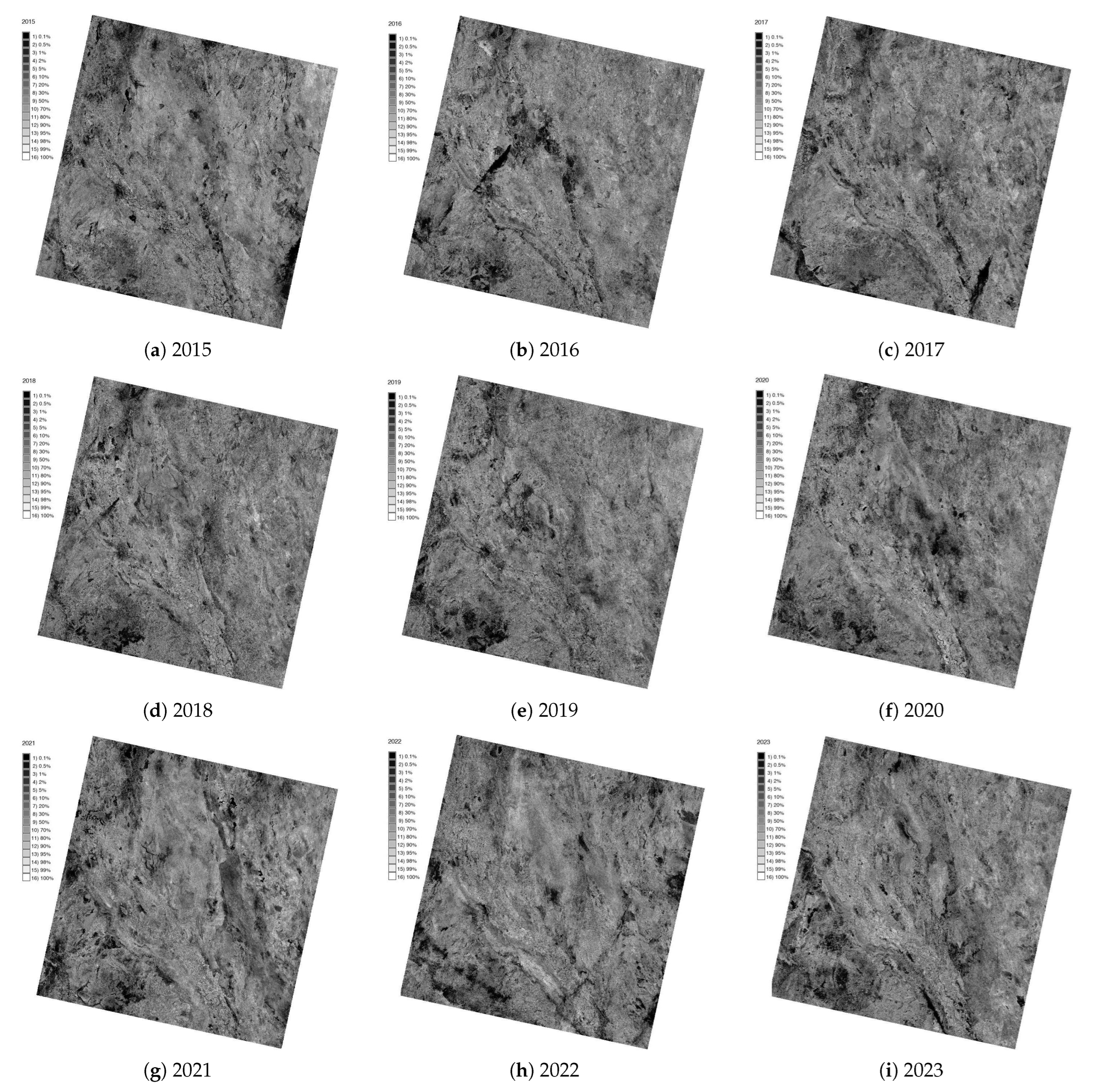
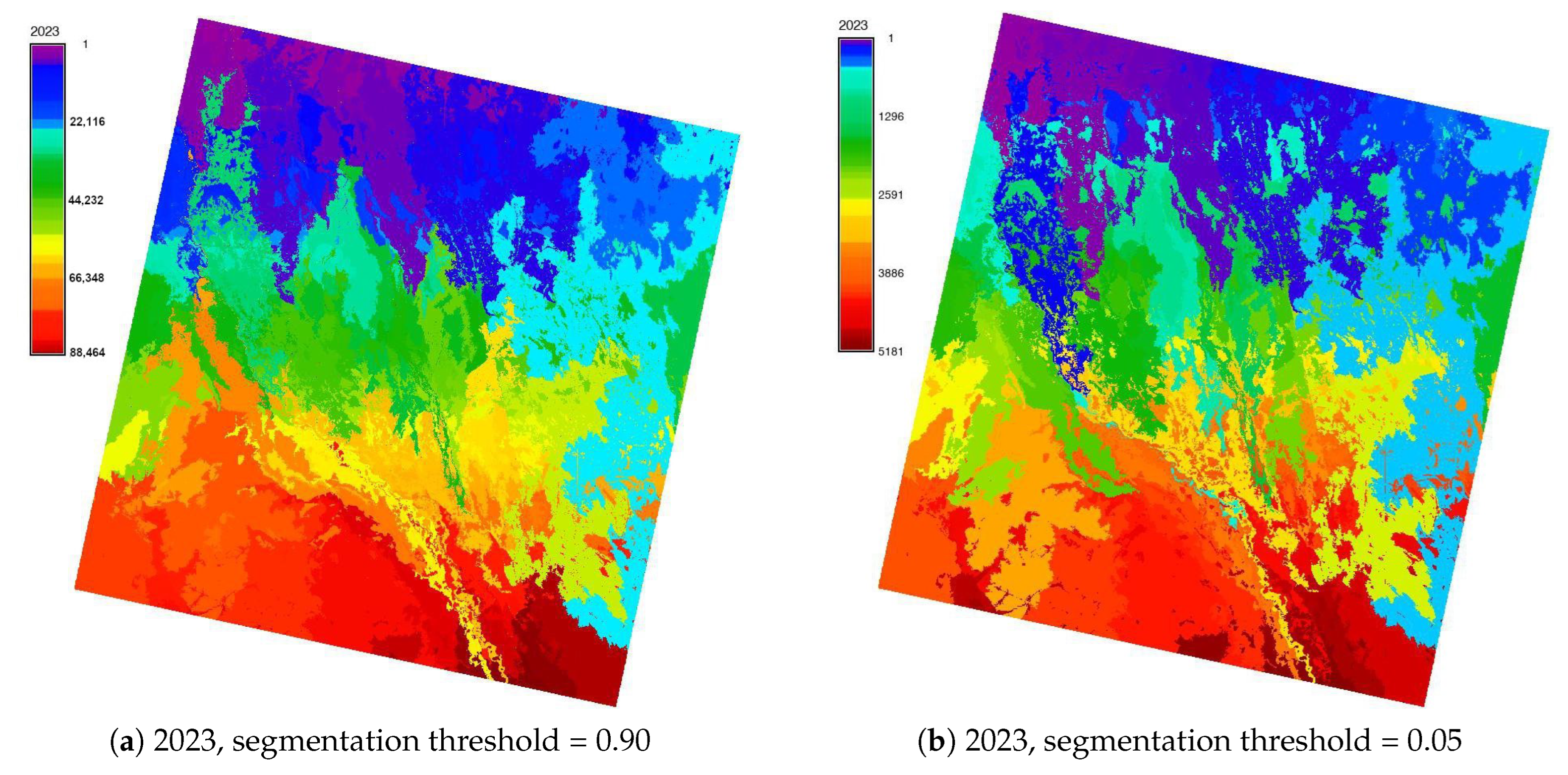
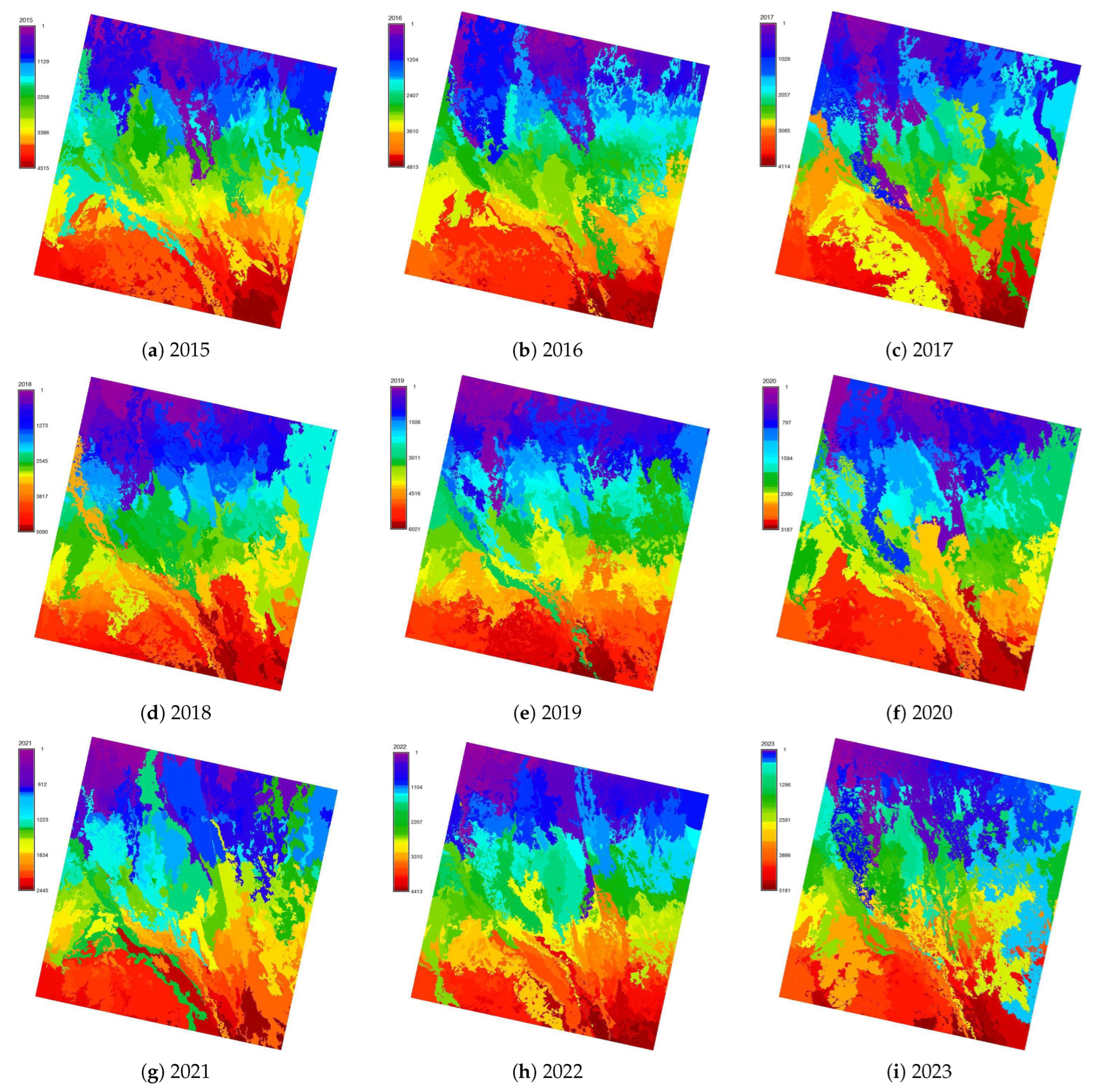
3.7. Image Segmentation
3.8. Parameter Estimation
3.9. Clustering
3.10. Classification
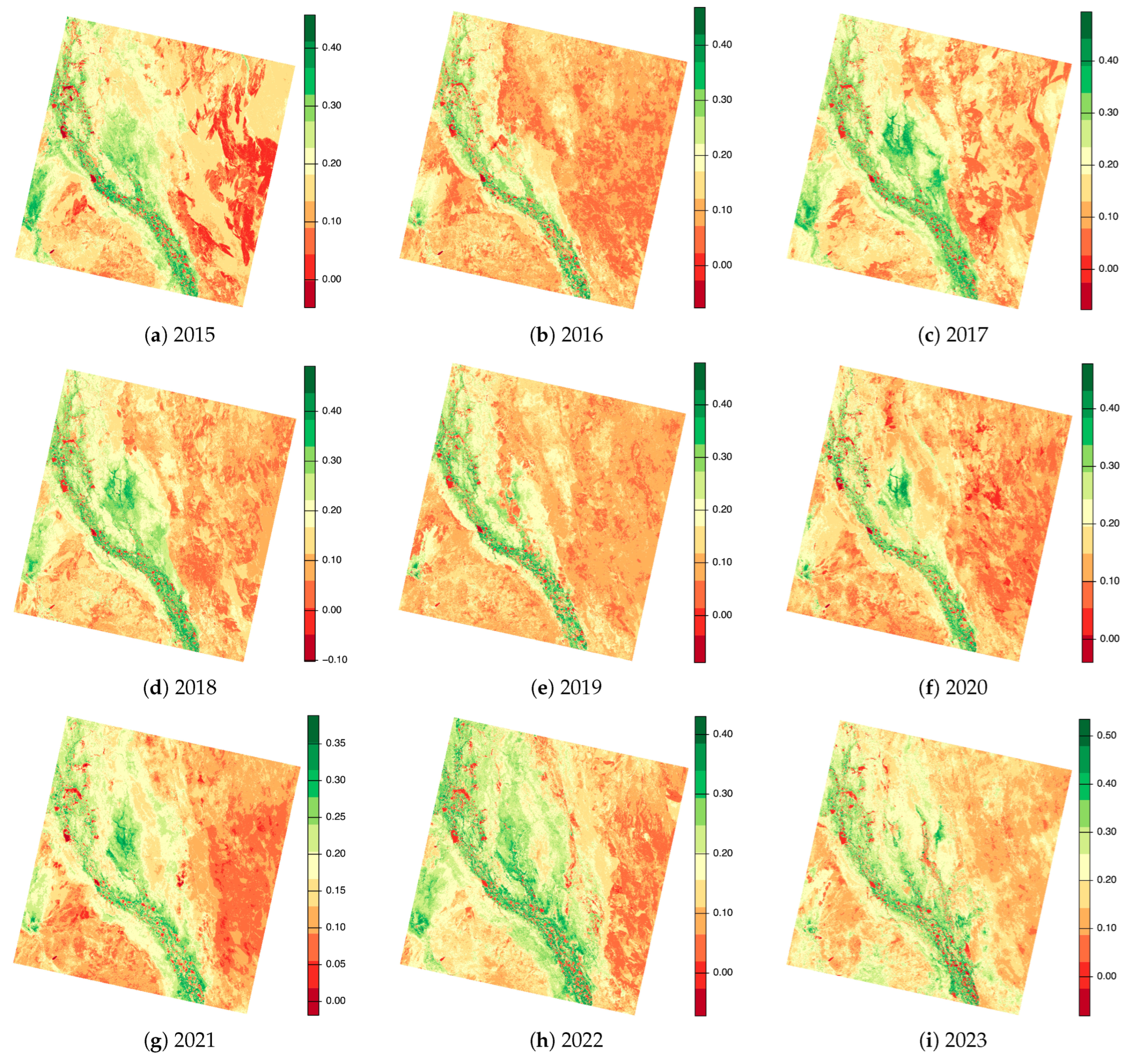
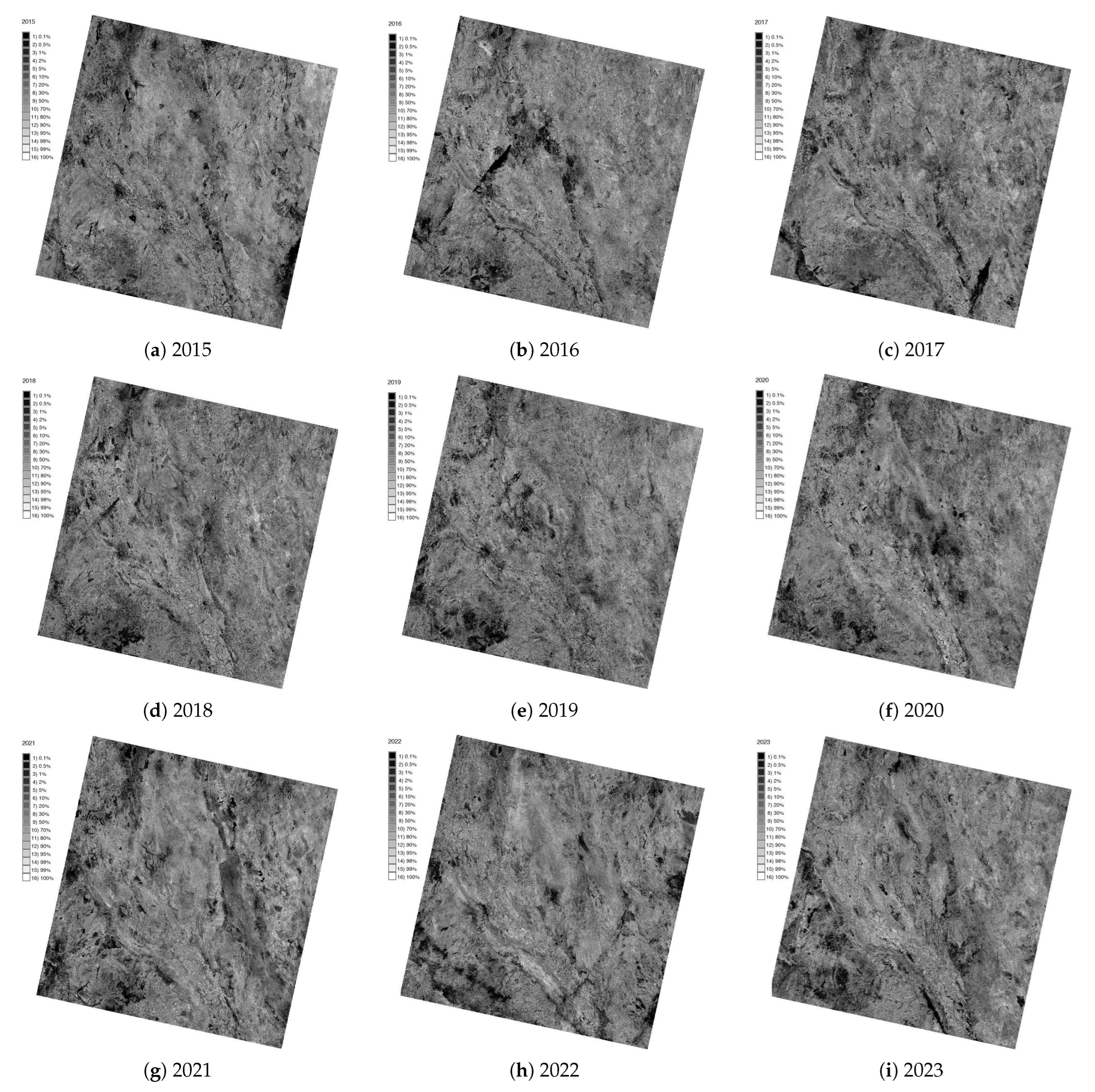
3.11. Calculating the NDVI
3.12. Accuracy Assessment
4. Results
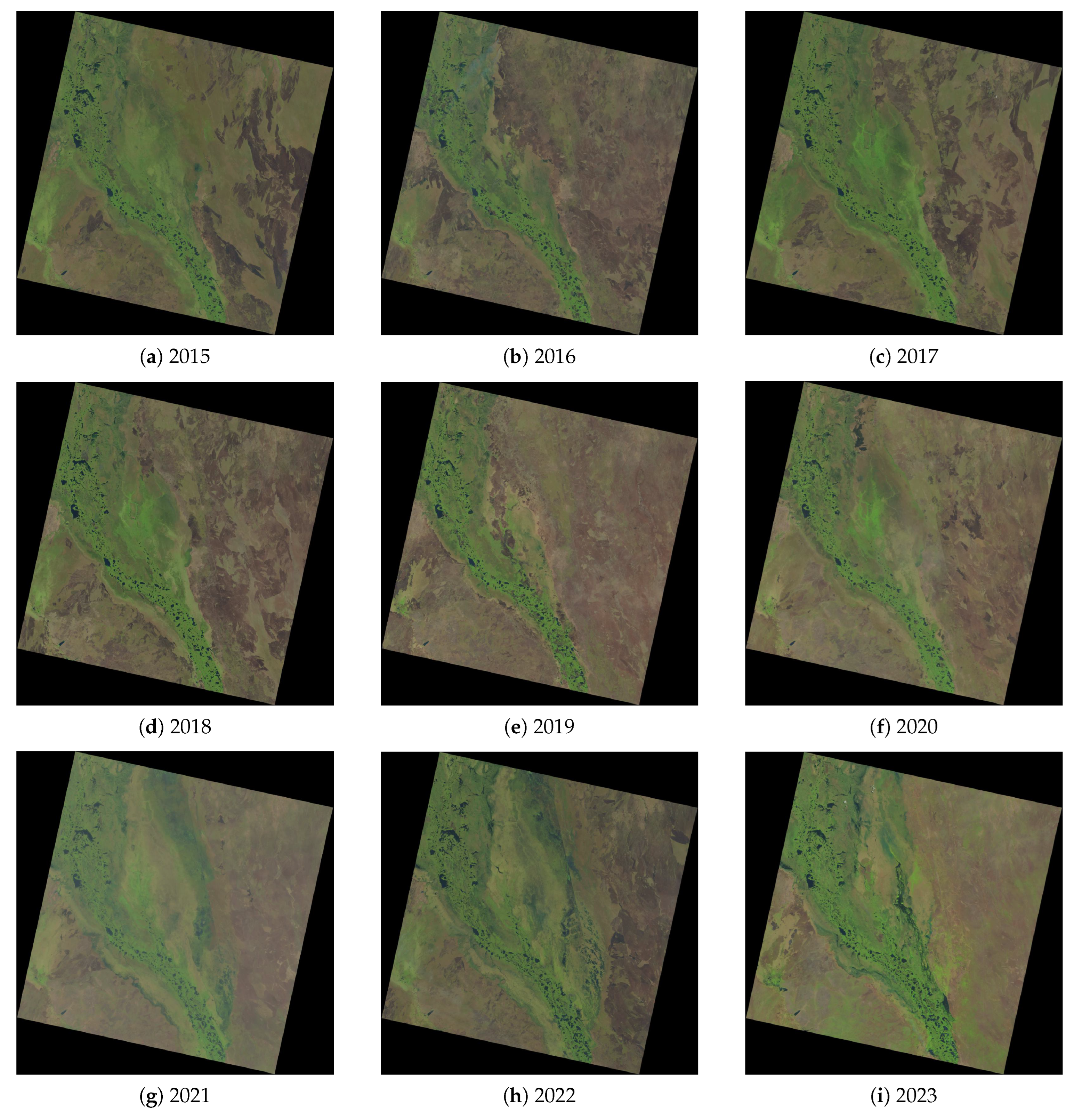
4.1. Remote Sensing Data Analysis
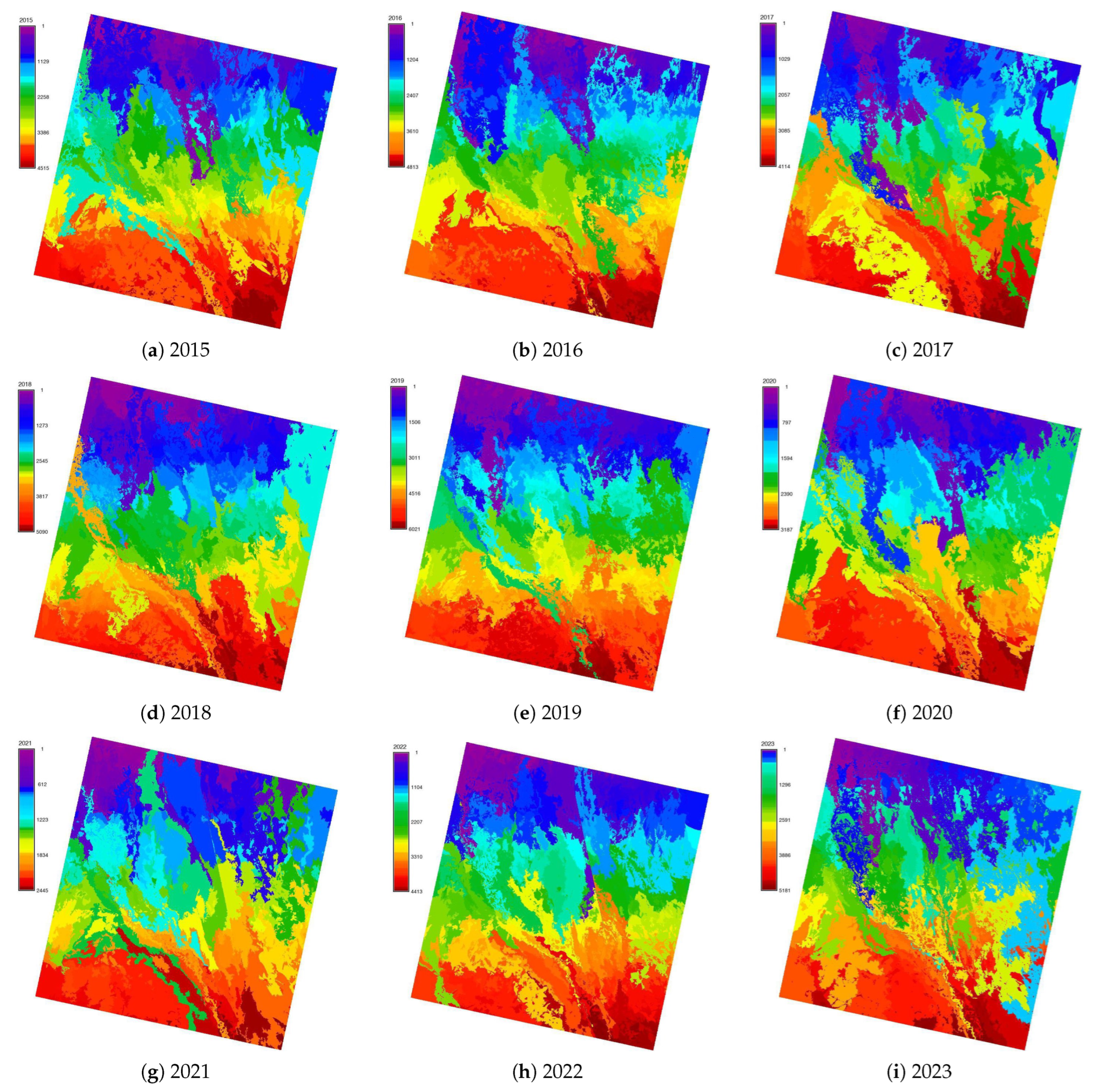
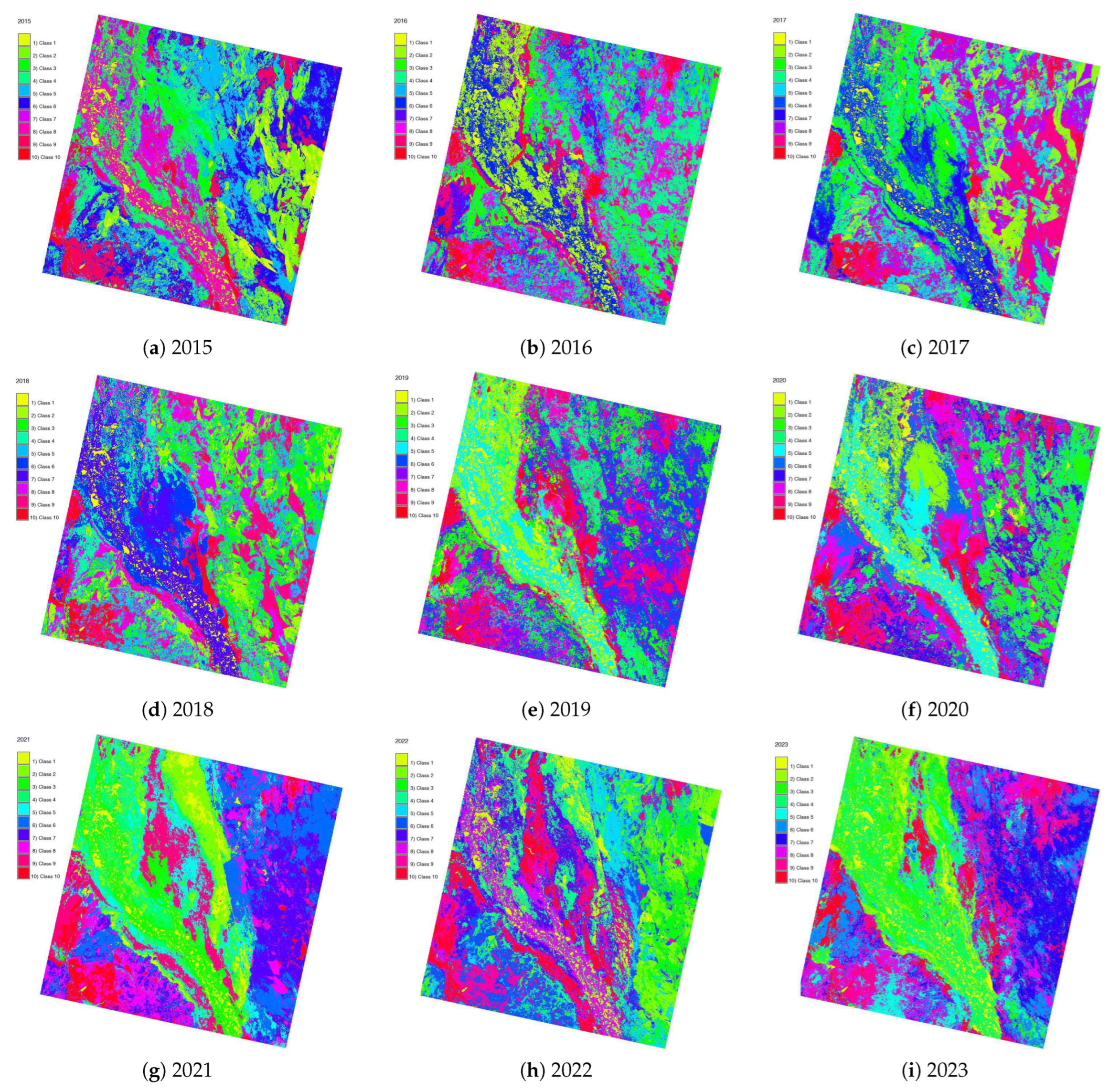
4.2. Detection of Segmented Areas
5. Discussion
5.1. Advantages of the Tools
5.2. Key Deliverables
5.3. Reliability of Methods
6. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AVHRR | Advanced Very High-Resolution Radiometer |
| CNNs | Convolutional Neural Networks |
| DCW | Digital Chart of the World |
| DEM | Digital Elevation Model |
| FAO UN | Food and Agriculture Organization of the United Nations |
| GEBCO | General Bathymetric Chart of the Oceans |
| GMT | Generic Mapping Tools |
| GRASS | Geographic Resources Analysis Support System |
| GIS | Geographic Information System |
| Landsat OLI/TIRS | Landsat Operational Land Imager and Thermal Infrared Sensor |
| NDVI | Normalized Difference Vegetation Index |
| TIFF | Tag Image File Format |
| UN OCHA | United Nations Office for the Coordination of Humanitarian Affairs |
| USGS | United States Geological Survey |
| WHO | World Health Organization |
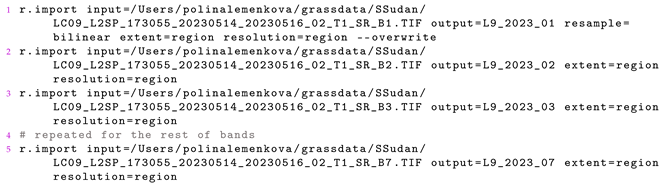
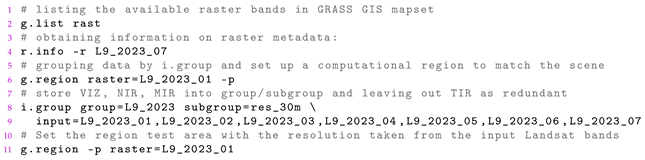
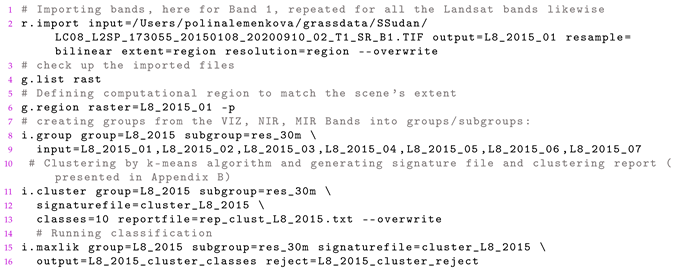
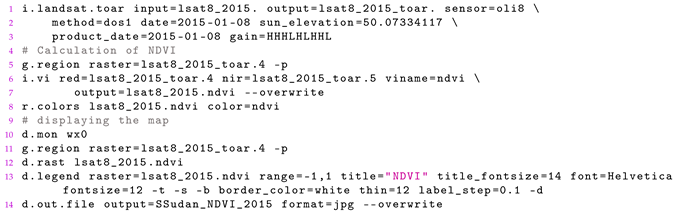
Appendix A. GRASS GIS Scripts for Image Processing, Segmentation and Classification
| Listing A1. GRASS GIS code for importing data for the Landsat OLI/TIRS bands. |
 |
| Listing A2. GRASS GIS code for creating semantic labels for the Landsat OLI/TIRS. |
 |
| Listing A3. GRASS GIS code for segmentation for image tested with 2 levels of threshold. |
 |
| Listing A4. GRASS GIS code for mapping the segmented raster image Landsat 9 OLI/TIRS. |
 |
| Listing A5. GRASS GIS code for classification of the Sudd region based on the segmented raster image Landsat 9 OLI/TIRS. |
 |
| Listing A6. GRASS GIS code for computing the NDVI for assessment of vegetation coverage over Sudd (example for 2015). |
 |
| Listing A7. GRASS GIS code for computing the error matrix and kappa parameters for accuracy assessment of Landsat classification. |
 |
Appendix B. Accuracy Assessment: Calculated Error Matrices and Kappa Parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| cat# | Class 1 | Class 2 | Class 3 | Class 4 | Class 5 | Class 6 | Class 7 | Class 8 | Class 9 | Class 10 | RowSum |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Class 1 | 733,990 | 71,250 | 51,480 | 7839 | 46,757 | 700,709 | 113,227 | 113,324 | 9887 | 5118 | 1,853,581 |
| Class 2 | 26,060 | 6727 | 35,538 | 26,438 | 364,431 | 2,554,250 | 860,056 | 672,721 | 31,768 | 28,371 | 4,606,360 |
| Class 3 | 126,808 | 1,031,318 | 265,035 | 526,075 | 315,900 | 19,612 | 264,441 | 41,069 | 252,749 | 7260 | 2,850,267 |
| Class 4 | 49,698 | 1,019,916 | 414,261 | 1,502,475 | 729,561 | 151,428 | 544,346 | 56,599 | 699,290 | 36,435 | 5,204,009 |
| Class 5 | 55,812 | 124,601 | 65,706 | 587,382 | 1,069,099 | 2,306,196 | 1,927,058 | 744,408 | 55,621 | 67,236 | 7,003,119 |
| Class 6 | 52,480 | 54,546 | 5866 | 311,905 | 743,280 | 2,588,755 | 1,866,894 | 982,650 | 119,871 | 76,889 | 6,803,136 |
| Class 7 | 24,987 | 458,562 | 337,404 | 1,432,717 | 276,379 | 72,536 | 202,169 | 59,283 | 1,294,871 | 6729 | 4,165,637 |
| Class 8 | 85,044 | 497,573 | 2,216,937 | 118,633 | 30,004 | 449 | 10,108 | 1598 | 90,003 | 1007 | 3,051,356 |
| Class 9 | 5751 | 10,876 | 1737 | 36,475 | 89,652 | 424,421 | 705,550 | 1,286,583 | 70,834 | 17,102 | 2,648,981 |
| Class 10 | 19,907 | 13,236 | 51,275 | 160,668 | 121,074 | 40,570 | 76,701 | 87,681 | 861,525 | 291 | 1,432,928 |
| ColSum | 1,180,537 | 3,288,605 | 3,445,239 | 4,710,607 | 3,786,137 | 8,858,926 | 6,570,550 | 4,045,916 | 3,486,419 | 246,438 | 39,619,374 |
| cat# | Class 1 | Class 2 | Class 3 | Class 4 | Class 5 | Class 6 | Class 7 | Class 8 | Class 9 | Class 10 | RowSum |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Class 1 | 780,231 | 220,046 | 154,297 | 83,530 | 30,508 | 5503 | 20,356 | 2895 | 47,941 | 1275 | 1,346,582 |
| Class 2 | 99,741 | 1,580,160 | 638,455 | 893,432 | 63,464 | 1502 | 16,019 | 1711 | 347,409 | 2430 | 3,644,323 |
| Class 3 | 45,287 | 105,436 | 146,747 | 352,943 | 857,966 | 1,395,889 | 842,830 | 283,690 | 379,210 | 41,515 | 4,451,513 |
| Class 4 | 35,525 | 99,491 | 19,632 | 174,655 | 357,086 | 3,414,838 | 689,202 | 854,448 | 255,453 | 45,549 | 5,945,879 |
| Class 5 | 62,103 | 104,822 | 101,515 | 593,389 | 1,081,257 | 1,214,029 | 1,864,351 | 467,083 | 179,258 | 81,250 | 5,749,057 |
| Class 6 | 78,202 | 734,566 | 2,116,828 | 415,473 | 20,173 | 166 | 6818 | 564 | 101,522 | 2036 | 3,476,348 |
| Class 7 | 34,081 | 325,250 | 183,816 | 1,522,681 | 609,621 | 148,043 | 895,476 | 76,289 | 838,978 | 29,955 | 4,664,190 |
| Class 8 | 20,087 | 100,341 | 47,817 | 255,331 | 336,311 | 2,069,073 | 1,207,148 | 1,054,234 | 176,795 | 22,133 | 5,289,270 |
| Class 9 | 26,399 | 62,204 | 48,815 | 358,068 | 358,608 | 529,045 | 819,897 | 518,414 | 845,407 | 14,161 | 3,581,018 |
| Class 10 | 4591 | 43,312 | 37,546 | 143,710 | 82,955 | 93,770 | 258,290 | 809,648 | 410,504 | 6326 | 1,890,652 |
| ColSum | 1,186,247 | 3,375,628 | 3,495,468 | 4,793,212 | 3,797,949 | 8,871,858 | 6,620,387 | 4,068,976 | 3,582,477 | 246,630 | 40,038,832 |
| cat# | Class 1 | Class 2 | Class 3 | Class 4 | Class 5 | Class 6 | Class 7 | Class 8 | Class 9 | Class 10 | RowSum |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Class 1 | 714,689 | 117,487 | 52,980 | 29,136 | 14,787 | 67,746 | 17,701 | 9756 | 14,785 | 723 | 1,039,790 |
| Class 2 | 29,352 | 89,841 | 42,227 | 189,497 | 504,534 | 2,227,043 | 827,928 | 594,172 | 32,439 | 44,234 | 4,581,267 |
| Class 3 | 132,797 | 1,146,691 | 330,041 | 822,072 | 207,013 | 12,648 | 202,651 | 11,771 | 1,125,908 | 7090 | 3,998,682 |
| Class 4 | 41,460 | 802,806 | 164,039 | 1,157,656 | 1,081,506 | 581,552 | 1,024,952 | 173,449 | 519,751 | 25,839 | 5,573,010 |
| Class 5 | 31,282 | 101,832 | 47,418 | 331,621 | 491,478 | 1,274,293 | 1,413,071 | 693,162 | 42,470 | 39,397 | 4,466,024 |
| Class 6 | 94,598 | 767,242 | 1,889,767 | 803,189 | 138,593 | 5507 | 58,560 | 6832 | 831,596 | 3347 | 4,599,231 |
| Class 7 | 60,993 | 201,077 | 890,179 | 350,265 | 126,975 | 21,032 | 61,723 | 47,984 | 720,003 | 432 | 2,480,663 |
| Class 8 | 56,736 | 177,652 | 99,278 | 980,998 | 910,525 | 1,832,830 | 1,627,262 | 653,205 | 200,345 | 67,755 | 6,606,586 |
| Class 9 | 28,932 | 33,432 | 11,456 | 142,960 | 309,440 | 2,717,290 | 1,130,225 | 1,143,763 | 76,522 | 52,290 | 5,646,310 |
| Class 10 | 4903 | 29,081 | 7521 | 51,253 | 49,527 | 129,146 | 315,224 | 775,406 | 94,041 | 6616 | 1,462,718 |
| ColSum | 1,195,742 | 3,467,141 | 3,534,906 | 4,858,647 | 3,834,378 | 8,869,087 | 6,679,297 | 4,109,500 | 3,657,860 | 247,723 | 4,045,4281 |
| cat# | Class 1 | Class 2 | Class 3 | Class 4 | Class 5 | Class 6 | Class 7 | Class 8 | Class 9 | Class 10 | RowSum |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Class 1 | 732,406 | 145,516 | 55,377 | 18,756 | 2042 | 567 | 2028 | 265 | 3889 | 540 | 961,386 |
| Class 2 | 42,867 | 83,461 | 39,794 | 120,546 | 646,654 | 1,668,545 | 60,5985 | 381,538 | 67,729 | 44,928 | 3,702,047 |
| Class 3 | 50,806 | 72,438 | 243,34 | 192,753 | 550,591 | 3,041,550 | 1,180,439 | 877,680 | 45,519 | 67,934 | 6,104,044 |
| Class 4 | 39,524 | 549,507 | 130,403 | 1,162,081 | 956,566 | 163,501 | 1,005,861 | 76,938 | 592,355 | 40,140 | 4,716,876 |
| Class 5 | 19,153 | 74,871 | 29,427 | 184,968 | 292,231 | 1,738,221 | 1,323,091 | 903,817 | 42,208 | 24,979 | 4,632,966 |
| Class 6 | 103,865 | 1,380,744 | 464,199 | 991,808 | 155,944 | 2218 | 115,542 | 2619 | 675,785 | 4254 | 3,896,978 |
| Class 7 | 108,450 | 727,966 | 2,543,054 | 684,347 | 22,111 | 767 | 13,922 | 755 | 586,134 | 1725 | 4,689,231 |
| Class 8 | 40,667 | 144,063 | 127,960 | 1,069,080 | 804,237 | 591,309 | 1,066,923 | 232,496 | 725,319 | 28,954 | 4,831,008 |
| Class 9 | 19,387 | 60,859 | 25,457 | 154,727 | 238,558 | 1,584,571 | 993,358 | 960,600 | 88,933 | 25,916 | 4,152,366 |
| Class 10 | 24,735 | 80,861 | 21,160 | 165,180 | 115,558 | 65,516 | 258,729 | 595,195 | 693,860 | 6799 | 2,027,593 |
| ColSum | 1,181,860 | 3,320,286 | 3,461,165 | 4,744,246 | 3,784,492 | 8,856,765 | 6,565,878 | 4,031,903 | 3,521,731 | 246,169 | 39,714,495 |
| cat# | Class 1 | Class 2 | Class 3 | Class 4 | Class 5 | Class 6 | Class 7 | Class 8 | Class 9 | Class 10 | RowSum |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Class 1 | 718,640 | 203302 | 172,239 | 93,576 | 43,600 | 4256 | 18,785 | 1009 | 154,123 | 961 | 1,410,491 |
| Class 2 | 125,598 | 1,493,295 | 662,957 | 875,909 | 62,791 | 233 | 12,810 | 1003 | 199,881 | 2890 | 3,437,367 |
| Class 3 | 54,049 | 77,429 | 71,198 | 263,136 | 915,884 | 1,601,573 | 838,669 | 292,464 | 542,080 | 38,583 | 4,695,065 |
| Class 4 | 54,698 | 420,455 | 224,468 | 1,593,385 | 860,119 | 197,570 | 1,208,920 | 145,740 | 498,281 | 68,378 | 5,272,014 |
| Class 5 | 100,175 | 681,102 | 2,082,822 | 353,990 | 9774 | 12 | 1168 | 33 | 55,344 | 1488 | 3,285,908 |
| Class 6 | 62,037 | 74,841 | 42,628 | 229,455 | 708,692 | 3,498,641 | 1,282,209 | 997,764 | 207,553 | 73,493 | 7,177,313 |
| Class 7 | 27,615 | 96,635 | 47,774 | 265,935 | 444,419 | 2,280,163 | 1,435,551 | 1,089,070 | 182,786 | 27,049 | 5,896,997 |
| Class 8 | 22,403 | 103,576 | 69,604 | 564,151 | 491,174 | 491,554 | 1,015,617 | 231,168 | 782,133 | 20,739 | 3,792,119 |
| Class 9 | 7734 | 84,827 | 34,720 | 226,934 | 165,732 | 728,783 | 621,082 | 968,785 | 172,290 | 5761 | 3,016,648 |
| Class 10 | 8316 | 75,416 | 46,918 | 267,452 | 80,567 | 52,556 | 124,414 | 300,513 | 716,496 | 6747 | 1,679,395 |
| ColSum | 1,181,265 | 3,310,878 | 3,455,328 | 4,733,923 | 3,782,752 | 8,855,341 | 6,559,225 | 4,027,549 | 3,510,967 | 246,089 | 39,663,317 |
| cat# | Class 1 | Class 2 | Class 3 | Class 4 | Class 5 | Class 6 | Class 7 | Class 8 | Class 9 | Class 10 | RowSum |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Class 1 | 683,544 | 309,023 | 99,294 | 155,266 | 51,772 | 166,487 | 46,734 | 33,393 | 90,153 | 1763 | 1,637,429 |
| Class 2 | 140,068 | 1,405,103 | 502,303 | 960,693 | 301,650 | 1969 | 244,355 | 7645 | 463,950 | 15,581 | 4,043,317 |
| Class 3 | 34,985 | 29,270 | 6265 | 56,130 | 239,734 | 1,980,369 | 393,702 | 256,511 | 33,095 | 39,034 | 3,069,095 |
| Class 4 | 37,825 | 13,154 | 4829 | 51,406 | 404,025 | 3,157,656 | 857,426 | 692,151 | 43,581 | 53,723 | 5,315,776 |
| Class 5 | 138,477 | 671,024 | 2,455,571 | 568,894 | 34,995 | 1184 | 15,184 | 5799 | 152,695 | 3956 | 4,047,779 |
| Class 6 | 51,528 | 717,269 | 267,346 | 1,543,446 | 1,005,959 | 256,180 | 637,860 | 126,776 | 660,357 | 42,351 | 5,309,072 |
| Class 7 | 18,831 | 12,591 | 2094 | 90,961 | 386,704 | 1,777,537 | 1,583,559 | 956,054 | 54,353 | 31,397 | 4,914,081 |
| Class 8 | 44,343 | 134,707 | 147,092 | 1,003,947 | 1,035,822 | 832,105 | 1,440,973 | 404,912 | 853,895 | 42,981 | 5,940,777 |
| Class 9 | 19,763 | 43,411 | 10,566 | 249,256 | 272,111 | 597,942 | 1,194,978 | 989,956 | 638,501 | 9637 | 4,026,121 |
| Class 10 | 18,842 | 61,878 | 10,717 | 128,166 | 71,966 | 106,674 | 222,352 | 605,939 | 610,029 | 6357 | 1,842,920 |
| ColSum | 1,188,206 | 3,397,430 | 3,506,077 | 4,808,165 | 3,804,738 | 8,878,103 | 6,637,123 | 4,079,136 | 3,600,609 | 246,780 | 40,146,367 |
| cat# | Class 1 | Class 2 | Class 3 | Class 4 | Class 5 | Class 6 | Class 7 | Class 8 | Class 9 | Class 10 | RowSum |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Class 1 | 702,916 | 170,016 | 144,023 | 121,055 | 160,622 | 146,539 | 319,847 | 201,335 | 17,125 | 11,327 | 1,994,805 |
| Class 2 | 137,245 | 772,838 | 405,525 | 861,919 | 482,726 | 297,935 | 637,744 | 319,340 | 133,967 | 40,635 | 4,089,874 |
| Class 3 | 100,084 | 553,381 | 1,979,310 | 375,399 | 32,820 | 15,876 | 19,359 | 17,344 | 62,178 | 772 | 3,156,523 |
| Class 4 | 52,869 | 1,280,901 | 736,804 | 1,341,217 | 227,239 | 203,122 | 179,091 | 173,844 | 332,915 | 21,818 | 4,549,820 |
| Class 5 | 31,298 | 348,878 | 82,337 | 988,002 | 669,137 | 367,343 | 590,315 | 179,041 | 732,481 | 23,781 | 4,012,613 |
| Class 6 | 82,156 | 20,454 | 2383 | 73,286 | 843,448 | 2,928,722 | 1,185,373 | 683,802 | 52,542 | 112,618 | 5,984,784 |
| Class 7 | 14,080 | 2677 | 12 | 10,134 | 199,861 | 3,664,407 | 1,106,320 | 869,961 | 27,095 | 16,303 | 5,910,850 |
| Class 8 | 11,133 | 3988 | 2954 | 140,173 | 514,342 | 987,416 | 1,809,103 | 776,155 | 79,990 | 9808 | 4,335,062 |
| Class 9 | 53,852 | 247,468 | 154,669 | 881,230 | 602,744 | 79,115 | 361,528 | 69,245 | 1,863,006 | 6719 | 4,319,576 |
| Class 10 | 2991 | 1500 | 291 | 19,321 | 73,820 | 188,976 | 432,371 | 791,227 | 303,449 | 3076 | 1,817,022 |
| ColSum | 1,188,624 | 3,402,101 | 3,508,308 | 4,811,736 | 3,806,759 | 8,879,451 | 6,641,051 | 4,081,294 | 3,604,748 | 246,857 | 40,170,929 |
| cat# | Class 1 | Class 2 | Class 3 | Class 4 | Class 5 | Class 6 | Class 7 | Class 8 | Class 9 | Class 10 | RowSum |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Class 1 | 731,146 | 290,319 | 237,623 | 291,223 | 132,078 | 263,431 | 319,057 | 187,293 | 56,788 | 22,701 | 2,531,659 |
| Class 2 | 35,991 | 11,448 | 5617 | 16,586 | 180,690 | 2,141,375 | 456,161 | 458,916 | 27,192 | 49,483 | 3,383,459 |
| Class 3 | 18,712 | 5274 | 1374 | 21,109 | 225,586 | 2,424,597 | 624,656 | 524,088 | 18,643 | 21,329 | 3,885,368 |
| Class 4 | 130,449 | 1,176,764 | 483,567 | 1,149,433 | 546,547 | 352,960 | 717,444 | 317,804 | 486,570 | 39,343 | 5,400,881 |
| Class 5 | 30,884 | 35,859 | 16,397 | 213,410 | 535,419 | 1,358,447 | 1,173,149 | 582,758 | 40,234 | 37,240 | 4,023,797 |
| Class 6 | 26,411 | 18,092 | 8246 | 150,852 | 504,812 | 1,178,353 | 1,640,165 | 765,099 | 49,838 | 32,619 | 4,374,487 |
| Class 7 | 53,164 | 1,017,166 | 636,794 | 1,598,491 | 736,672 | 375,514 | 548,660 | 219,776 | 849,537 | 30,208 | 6,065,982 |
| Class 8 | 108,133 | 594,918 | 1,948,383 | 348,009 | 32,300 | 59,628 | 18,387 | 25,360 | 138,083 | 1559 | 3,274,760 |
| Class 9 | 24,740 | 168,328 | 93,599 | 521,826 | 575,816 | 606,032 | 927,642 | 694,886 | 707,640 | 9358 | 4,329,867 |
| Class 10 | 32,749 | 110,613 | 91,007 | 522,968 | 352,275 | 131,057 | 246,218 | 329,246 | 1,254,761 | 3620 | 3,074,514 |
| ColSum | 1,192,379 | 3,428,781 | 3,522,607 | 4,833,907 | 3,822,195 | 8,891,394 | 6,671,539 | 4,105,226 | 3,629,286 | 247,460 | 40,344,774 |
| cat# | Class 1 | Class 2 | Class 3 | Class 4 | Class 5 | Class 6 | Class 7 | Class 8 | Class 9 | Class 10 | RowSum |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Class 1 | 696,181 | 265,690 | 210,677 | 147,949 | 47,848 | 2351 | 28,532 | 11,048 | 318,677 | 916 | 1,729,869 |
| Class 2 | 149,373 | 875,176 | 345,372 | 679,954 | 298,325 | 17,823 | 276,754 | 36,126 | 491,199 | 13,422 | 3,183,524 |
| Class 3 | 68,987 | 1,103,574 | 616,225 | 1,449,488 | 384,491 | 27,522 | 383,103 | 58,688 | 592,878 | 31,005 | 4,715,961 |
| Class 4 | 113,808 | 718,554 | 1,928,287 | 399,929 | 82,193 | 29,429 | 53,107 | 31,572 | 253,169 | 1602 | 3,611,650 |
| Class 5 | 36,422 | 248,019 | 189,972 | 890,162 | 567,087 | 292,147 | 1,021,289 | 370,809 | 523,327 | 29,114 | 4,168,348 |
| Class 6 | 44,185 | 40,446 | 42,802 | 309,544 | 969,941 | 1,256,540 | 1,076,897 | 398,925 | 377,458 | 54,559 | 4,571,297 |
| Class 7 | 51,650 | 18,914 | 13,974 | 115,112 | 323,824 | 4,387,107 | 966,427 | 899,834 | 55,327 | 72,308 | 6,904,477 |
| Class 8 | 17,292 | 54,481 | 80,843 | 400,775 | 627,113 | 1,343,379 | 1,726,289 | 675,519 | 195,048 | 23,051 | 5,143,790 |
| Class 9 | 9240 | 5475 | 4241 | 86,789 | 210,760 | 1,163,138 | 817,121 | 1,116,546 | 54,160 | 12,431 | 3,479,901 |
| Class 10 | 7212 | 129,323 | 102,017 | 367,368 | 311,372 | 314,712 | 311,368 | 501,372 | 792,399 | 8292 | 2,845,435 |
| ColSum | 1,194,350 | 3,459,652 | 3,534,410 | 4,847,070 | 3,822,954 | 8,834,148 | 6,660,887 | 4,100,439 | 3,653,642 | 246,700 | 40,354,252 |
Appendix C. Clustering Report of GRASS GIS: Calculated for the Landsat Image
#################### CLUSTER (Sun Jul 2 13:35:38 2023) #################### Location: SSudan Mapset: PERMANENT Group: L8_2016 Subgroup: res_30m L8_2016_01@PERMANENT L8_2016_02@PERMANENT L8_2016_03@PERMANENT L8_2016_04@PERMANENT L8_2016_05@PERMANENT L8_2016_06@PERMANENT L8_2016_07@PERMANENT Result signature file: cluster_L8_2016
Region North: 915615.00 East: 416415.00 South: 682785.00 West: 189555.00 Res: 30.00 Res: 30.00 Rows: 7761 Cols: 7562 Cells: 58688682 Mask: no
Cluster parameters Nombre de classes initiales: 10 Minimum class size: 17 Minimum class separation: 0.000000 Percent convergence: 98.000000 Maximum number of iterations: 30
Row sampling interval: 77 Col sampling interval: 75
Sample size: 7018 points
means and standard deviations for 7 bands
moyennes 8341.81 8839.87 9796.06 10347 13521 14268 12593.9 écart-type 333.559 397.401 538.123 866.886 1982.91 1927.26 1630.37
initial means for each band classe 1 8008.25 8442.47 9257.94 9480.1 11538.1 12340.7 10963.6 classe 2 8082.38 8530.78 9377.52 9672.74 11978.8 12769 11325.9 classe 3 8156.5 8619.09 9497.1 9865.39 12419.4 13197.3 11688.2 classe 4 8230.63 8707.41 9616.69 10058 12860.1 13625.5 12050.5 classe 5 8304.75 8795.72 9736.27 10250.7 13300.7 14053.8 12412.8 classe 6 8378.87 8884.03 9855.85 10443.3 13741.3 14482.1 12775.1 classe 7 8453 8972.34 9975.43 10636 14182 14910.4 13137.4 classe 8 8527.12 9060.65 10095 10828.6 14622.6 15338.7 13499.7 classe 9 8601.25 9148.96 10214.6 11021.2 15063.3 15766.9 13862 classe 10 8675.37 9237.27 10334.2 11213.9 15503.9 16195.2 14224.3
class means/stddev for each band
class 1 (742) moyennes 7951.81 8339.41 9061.5 9178.93 11076.1 10852.5 10158.2 écart-type 257 262.216 327.764 454.974 1467.52 1336.4 1392.45
class 2 (402) moyennes 8135.75 8577.49 9368.62 9690.99 12024.7 12474.3 11626.2 écart-type 206.535 190.022 178.166 289.903 1227.6 363.851 1008.55
class 3 (548) moyennes 8233.58 8669.82 9470.17 9846.65 12343.6 13017.8 12042.3 écart-type 245.584 210.629 176.849 316.624 1339.17 373.941 1071.32
class 4 (767) moyennes 8279.24 8738.97 9588.8 10030.2 12750 13501.6 12361 écart-type 242.165 238.415 231.391 373.139 1383.88 409.177 1106.05
class 5 (973) moyennes 8313.09 8784.31 9689.54 10170 13314.3 14001.5 12545.2 écart-type 239.434 244.552 210.543 463.114 1560.73 423.344 1161.71
class 6 (1048) moyennes 8315.49 8800.87 9775.46 10268.6 14087 14416.4 12578.4 écart-type 241.751 268.06 233.945 562.31 1841.81 557.805 1274.18
class 7 (810) moyennes 8395.39 8911.3 9925.59 10555 14249.5 14988.4 12993.8 écart-type 226.309 252.265 238.656 532.931 1667.51 541.879 1186.87
class 8 (589) moyennes 8451.32 9018.86 10096.9 10879.7 14397.7 15615.7 13388.1 écart-type 244.289 296.493 347.211 510.795 1292.85 513.351 1030.24
class 9 (383) moyennes 8542.06 9143.82 10280.9 11175.9 14651.7 16187.5 13737.7 écart-type 226.471 215.073 232.586 443.034 1002.04 370.811 894.101
class 10 (756) moyennes 8805.39 9451.85 10737.7 11805 15797.2 17600.5 14593.2 écart-type 355.91 426.665 563.559 744.099 1255.16 1086.85 1233.36
Distribution des classes
742 402 548 767 973
1048 810 589 383 756
######## iteration 1 ###########
10 classes, 63.02% points stable
Distribution des classes
494 665 533 840 908
1068 608 721 664 517
######## iteration 2 ###########
10 classes, 75.24% points stable
Distribution des classes
369 624 667 799 988
1017 765 661 709 419
######## iteration 3 ###########
10 classes, 86.09% points stable
Distribution des classes
293 598 833 757 927
833 944 761 720 352
######## iteration 4 ###########
10 classes, 91.58% points stable
Distribution des classes
249 599 869 818 947
716 943 818 747 312
######## iteration 5 ###########
10 classes, 94.69% points stable
Distribution des classes
229 622 824 874 1009
648 896 865 751 300
######## iteration 6 ###########
10 classes, 96.21% points stable
Distribution des classes
217 640 795 921 1023
604 851 930 742 295
######## iteration 7 ###########
10 classes, 97.08% points stable
Distribution des classes
210 649 770 972 1018
582 807 984 735 291
######## iteration 8 ###########
10 classes, 98.10% points stable
Distribution des classes
205 647 756 1014 994
574 779 1025 733 291
########## final results ############# 10 classes (convergence=98.1%)
class separability matrix
1 2 3 4 5 6 7 8 9 10
1 0 2 1.3 0 3 1.6 1.0 0 4 2.6 1.8 1.1 0 5 2.6 1.4 1.3 0.8 0 6 1.9 0.8 1.6 2.3 1.8 0 7 2.5 1.3 1.5 1.3 0.7 1.2 0 8 3.2 2.2 2.1 1.2 1.0 2.3 1.1 0 9 3.2 2.2 2.3 1.8 1.4 2.0 1.1 0.8 0 10 3.6 2.8 2.9 2.4 2.2 2.7 2.0 1.5 1.0 0
class means/stddev for each band
class 1 (205) moyennes 7792.09 8125.77 8749.8 8685.25 9720.39 9033 8554.86 écart-type 269.203 248.508 325.667 367.886 1192.41 1032.1 923.673
class 2 (647) moyennes 7958.2 8386.62 9338.01 9492.04 13584.7 12120 10320.6 écart-type 184.172 217.176 342.491 469.583 889.819 826.243 578.126
class 3 (756) moyennes 8203 8635.6 9330.98 9704.04 11117.4 12400.5 11990.4 écart-type 180.79 155.652 189.472 264.785 613.41 635.13 637.803
class 4 (1014) moyennes 8474.28 8940.79 9705.86 10252.6 11769.3 13891.5 13495.2 écart-type 245.105 171.081 169.501 243.028 399.04 444.049 495.903
class 5 (994) moyennes 8293.53 8811.29 9742.85 10406.3 13008.9 14232 12696 écart-type 152.479 155.328 213.418 325.007 427.795 473.935 481.045
class 6 (574) moyennes 8070.27 8430.14 9509.54 9368.75 17090.2 13486.3 10600.1 écart-type 167.24 165.95 253.195 345.468 1170.35 700.286 496.695
class 7 (779) moyennes 8270.21 8760.55 9784.77 10342.1 14674.7 14922.2 12197.4 écart-type 140.611 149.126 220.25 390.38 674.5 660.764 550.25
class 8 (1025) moyennes 8556.69 9135.1 10148 11001.2 13308.2 15441.2 14126.3 écart-type 230.6 188.688 211.968 304.661 564.956 535.661 698.561
class 9 (733) moyennes 8568.91 9185.04 10382 11327.4 15261.8 16677 13644.6 écart-type 254.495 334.43 432.144 536.085 844.786 635.139 713.034
class 10 (291) moyennes 9044.36 9738.61 11135.6 12383.7 16390.7 18607.7 15523 écart-type 348.47 409.735 566.885 667.853 1254.96 936.286 1038.31
#################### CLASSES ####################
10 classes, 98.10% points stable
######## CLUSTER END (Sun Jul 2 13:35:38 2023) ########
References
- Solomon, C.; Breckon, T. Image Segmentation. In Fundamentals of Digital Image Processing; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2010; Chapter 10; pp. 263–290. [Google Scholar] [CrossRef]
- Li, W.; Zhao, W.; Yu, J.; Zheng, J.; He, C.; Fu, H.; Lin, D. Joint semantic–geometric learning for polygonal building segmentation from high-resolution remote sensing images. ISPRS J. Photogramm. Remote Sens. 2023, 201, 26–37. [Google Scholar] [CrossRef]
- Dong, X.; Zhang, C.; Fang, L.; Yan, Y. A deep learning based framework for remote sensing image ground object segmentation. Appl. Soft Comput. 2022, 130, 109695. [Google Scholar] [CrossRef]
- Wang, J.; Feng, Z.; Jiang, Y.; Yang, S.; Meng, H. Orientation Attention Network for semantic segmentation of remote sensing images. Knowl.-Based Syst. 2023, 267, 110415. [Google Scholar] [CrossRef]
- Lemenkova, P.; Debeir, O. Satellite Image Processing by Python and R Using Landsat 9 OLI/TIRS and SRTM DEM Data on Côte d’Ivoire, West Africa. J. Imaging 2022, 8, 317. [Google Scholar] [CrossRef] [PubMed]
- Lemenkova, P.; Debeir, O. Multispectral Satellite Image Analysis for Computing Vegetation Indices by R in the Khartoum Region of Sudan, Northeast Africa. J. Imaging 2023, 9, 98. [Google Scholar] [CrossRef]
- Li, F.; Wong, A.; Clausi, D.A. Comparison of unsupervised segmentation methods for surficial materials mapping in Nunavut, Canada using RADARSAT-2 polarimetric, Landsat-7, and DEM data. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 2727–2730. [Google Scholar] [CrossRef]
- Bona, D.S.; Murni, A.; Mursanto, P. Semantic Segmentation And Segmentation Refinement Using Machine Learning Case Study: Water Turbidity Segmentation. In Proceedings of the 2019 IEEE International Conference on Aerospace Electronics and Remote Sensing Technology (ICARES), Yogyakarta, Indonesia, 17–18 October 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Raši, R.; Kissiyar, O.; Vollmar, M. Land cover change detection thresholds for Landsat data samples. In Proceedings of the 2011 6th International Workshop on the Analysis of Multi-Temporal Remote Sensing Images (Multi-Temp), Trento, Italy, 12–14 July 2011; pp. 205–208. [Google Scholar] [CrossRef]
- Herlawati, H.; Handayanto, R.T.; Atika, P.D.; Sugiyatno, S.; Rasim, R.; Mugiarso, M.; Hendharsetiawan, A.A.; Jaja, J.; Purwanti, S. Semantic Segmentation of Landsat Satellite Imagery. In Proceedings of the 2022 Seventh International Conference on Informatics and Computing (ICIC), Denpasar, Bali, Indonesia, 8–9 December 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Yang, D.; Wu, D.; Ding, H. Study on land use change detection based on Landsat data with object-oriented method. In Proceedings of the 2021 International Conference on Computer Information Science and Artificial Intelligence (CISAI), Kunming, China, 17–19 September 2021; pp. 268–272. [Google Scholar] [CrossRef]
- Tunay, M.; Marangoz, M.A.; Karakis, S.; Atesoglu, A. Detecting Urban Vegetation from Different Images Using an Object-Based Approach in Bartin, Turkey. In Proceedings of the 2007 3rd International Conference on Recent Advances in Space Technologies, Istanbul, Turkey, 14–16 June 2007; pp. 636–640. [Google Scholar] [CrossRef]
- Xiong, Y.; Chen, Y.; Han, W.; Tong, L. A new aerosol retrieval algorithm based on statistical segmentation using Landsat-8 OLI data. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 4059–4062. [Google Scholar] [CrossRef]
- Kochher, R.; Sharma, A. Improved principle component analysis based gray stretch algorithm for landsat image segmentation. In Proceedings of the 2016 2nd International Conference on Next Generation Computing Technologies (NGCT), Dehradun, India, 14–16 October 2016; pp. 765–771. [Google Scholar] [CrossRef]
- Liu, Y.; Yao, L.; Xiong, W.; Zhou, Z. Fusion detection of ship targets in low resolution multi-spectral images. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 6545–6548. [Google Scholar] [CrossRef]
- Lohmann, G. Co-occurrence-based analysis and synthesis of textures. In Proceedings of the 12th International Conference on Pattern Recognition, Jerusalem, Israel, 9–13 October 1994; Volume 1, pp. 449–453. [Google Scholar] [CrossRef]
- Buscombe, D.; Goldstein, E.B. A Reproducible and Reusable Pipeline for Segmentation of Geoscientific Imagery. Earth Space Sci. 2022, 9, e2022EA002332. [Google Scholar] [CrossRef]
- Tzotsos, A.; Karantzalos, K.; Argialas, D. Multiscale Segmentation and Classification of Remote Sensing Imagery with Advanced Edge and Scale-Space Features. In Scale Issues in Remote Sensing; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2014; Chapter 9; pp. 170–196. [Google Scholar] [CrossRef]
- Turajlic, E.; Buza, E.; Akagic, A. Honey Badger Algorithm and Chef-based Optimization Algorithm for Multilevel Thresholding Image Segmentation. In Proceedings of the 2022 30th Telecommunications Forum (TELFOR), Belgrade, Serbia, 5–16 November 2022; pp. 1–4. [Google Scholar] [CrossRef]
- Chen, H.; Deng, X.; Yan, L.; Ye, Z. Multilevel thresholding selection based on the fireworks algorithm for image segmentation. In Proceedings of the 2017 International Conference on Security, Pattern Analysis, and Cybernetics (SPAC), Shenzhen, China, 15–17 December 2017; pp. 175–180. [Google Scholar] [CrossRef]
- Liu, W.; Shi, H.; Pan, S.; Huang, Y.; Wang, Y. An Improved Otsu Multi-Threshold Image Segmentation Algorithm Based on Pigeon-Inspired Optimization. In Proceedings of the 2018 11th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Beijing, China, 13–15 October 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Chao, J.; Xiaoxiao, Y.; Xiaohai, W. Algorithm of Double Threshold Image Segmentation Combined QGA with Two-Dimensional Otsu. In Proceedings of the 2020 5th International Conference on Mechanical, Control and Computer Engineering (ICMCCE), Harbin, China, 25–27 December 2020; pp. 2219–2223. [Google Scholar] [CrossRef]
- Tang, Z.; Wu, Y. One image segmentation method based on Otsu and fuzzy theory seeking image segment threshold. In Proceedings of the 2011 International Conference on Electronics, Communications and Control (ICECC), Ningbo, China, 9–11 September 2011; pp. 2170–2173. [Google Scholar] [CrossRef]
- Zhao, N.; Sui, S.K.; Kuang, P. Research on image segmentation method based on weighted threshold algorithm. In Proceedings of the 2015 12th International Computer Conference on Wavelet Active Media Technology and Information Processing (ICCWAMTIP), Chengdu, China, 18–20 December 2015; pp. 307–310. [Google Scholar] [CrossRef]
- Barbato, M.P.; Napoletano, P.; Piccoli, F.; Schettini, R. Unsupervised segmentation of hyperspectral remote sensing images with superpixels. Remote Sens. Appl. Soc. Environ. 2022, 28, 100823. [Google Scholar] [CrossRef]
- Pal, R.; Mukhopadhyay, S.; Chakraborty, D.; Suganthan, P.N. Very high-resolution satellite image segmentation using variable-length multi-objective genetic clustering for multi-class change detection. J. King Saud Univ. Comput. Inf. Sci. 2022, 34, 9964–9976. [Google Scholar] [CrossRef]
- Du, W.; Tian, X.; Sun, Y. A dynamic threshold edge-preserving smoothing segmentation algorithm for anterior chamber OCT images based on modified histogram. In Proceedings of the 2011 4th International Congress on Image and Signal Processing, Shanghai, China, 15–17 October 2011; Volume 2, pp. 1123–1126. [Google Scholar] [CrossRef]
- Choi, J.; Choi, H.H.S.; Chen, M. Multi-Level Thresholding Grayscale Image Segmentation Implemented with Genetic Algorithm. In Proceedings of the 2018 IEEE MIT Undergraduate Research Technology Conference (URTC), Cambridge, MA, USA, 5–7 October 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Kaihua, W.; Tao, B. Optimal Threshold Image Segmentation Method Based on Genetic Algorithm in Wheel Set Online Measurement. In Proceedings of the 2011 Third International Conference on Measuring Technology and Mechatronics Automation, Shanghai, China, 6–7 January 2011; Volume 2, pp. 799–802. [Google Scholar] [CrossRef]
- Chaofu, Z.; Li-Ni, M.; Lu-Na, J. Threshold infrared image segmentation based on improved genetic algorithm. In Proceedings of the IET International Conference on Information Science and Control Engineering 2012 (ICISCE 2012), Shenzhen, China, 7–9 December 2012; pp. 1–4. [Google Scholar] [CrossRef]
- Munyati, C.; Ratshibvumo, T.; Ogola, J. Landsat TM image segmentation for delineating geological zone correlated vegetation stratification in the Kruger National Park, South Africa. Phys. Chem. Earth Parts A/B/C 2013, 55–57, 1–10. [Google Scholar] [CrossRef]
- Wang, X.; Jing, S.; Dai, H.; Shi, A. High-resolution remote sensing images semantic segmentation using improved UNet and SegNet. Comput. Electr. Eng. 2023, 108, 108734. [Google Scholar] [CrossRef]
- Maurya, A.; Akashdeep; Mittal, P.; Kumar, R. A modified U-net-based architecture for segmentation of satellite images on a novel dataset. Ecol. Inform. 2023, 75, 102078. [Google Scholar] [CrossRef]
- Banerjee, B.; Varma G., S.; Buddhiraju, K.M. Satellite image segmentation: A novel adaptive mean-shift clustering based approach. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 4319–4322. [Google Scholar] [CrossRef]
- He, Y.; Sun, X.; Gao, L.; Zhang, B. Ship Detection Without Sea-Land Segmentation for Large-Scale High-Resolution Optical Satellite Images. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 717–720. [Google Scholar] [CrossRef]
- Zhao, J.; Chen, S.; Zhao, D.; Zhu, H.; Chen, X. Unsupervised saliency detection and a-contrario based segmentation for satellite images. In Proceedings of the 2013 Seventh International Conference on Sensing Technology (ICST), Wellington, New Zealand, 3–5 December 2013; pp. 678–681. [Google Scholar] [CrossRef]
- Wu, Q.; Gan, Y.; Lin, B.; Zhang, Q.; Chang, H. An active contour model based on fused texture features for image segmentation. Neurocomputing 2015, 151, 1133–1141. [Google Scholar] [CrossRef]
- Ratajczak, R.; Crispim-Junior, C.F.; Faure, E.; Fervers, B.; Tougne, L. Automatic Land Cover Reconstruction From Historical Aerial Images: An Evaluation of Features Extraction and Classification Algorithms. IEEE Trans. Image Process. 2019, 28, 3357–3371. [Google Scholar] [CrossRef] [PubMed]
- Erdem, F.; Bayram, B.; Bakirman, T.; Bayrak, O.C.; Akpinar, B. An ensemble deep learning based shoreline segmentation approach (WaterNet) from Landsat 8 OLI images. Adv. Space Res. 2021, 67, 964–974. [Google Scholar] [CrossRef]
- Kotaridis, I.; Lazaridou, M. Integrating image segmentation in the delineation of burned areas on Sentinel-2 and Landsat 8 data. Remote Sens. Appl. Soc. Environ. 2023, 30, 100944. [Google Scholar] [CrossRef]
- Toulouse, T.; Rossi, L.; Akhloufi, M.; Celik, T.; Maldague, X. Benchmarking of wildland fire colour segmentation algorithms. IET Image Process. 2015, 9, 1064–1072. [Google Scholar] [CrossRef]
- Mäkelä, H.; Pekkarinen, A. Estimation of timber volume at the sample plot level by means of image segmentation and Landsat TM imagery. Remote Sens. Environ. 2001, 77, 66–75. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, H.; Yao, B.; Lin, H.; An, X.; Liu, Y. Spatiotemporal changes of wetlands in China during 2000–2015 using Landsat imagery. J. Hydrol. 2023, 621, 129590. [Google Scholar] [CrossRef]
- Kharma, N.; Mazhurin, A.; Saigol, K.; Sabahi, F. Adaptable image segmentation via simple pixel classification. Comput. Intell. 2018, 34, 734–762. [Google Scholar] [CrossRef]
- Aalan Babu, A.; Mary Anita Rajam, V. Water-body segmentation from satellite images using Kapur’s entropy-based thresholding method. Comput. Intell. 2020, 36, 1242–1260. [Google Scholar] [CrossRef]
- Awad, M.M.; Chehdi, K. Satellite image segmentation using hybrid variable genetic algorithm. Int. J. Imaging Syst. Technol. 2009, 19, 199–207. [Google Scholar] [CrossRef]
- Saha, S.; Maulik, U. A new line symmetry distance based automatic clustering technique: Application to image segmentation. Int. J. Imaging Syst. Technol. 2011, 21, 86–100. [Google Scholar] [CrossRef]
- A, P.; Kumar, L.S. Automatic cloud segmentation from INSAT-3D satellite image via IKM and IFCM clustering. IET Image Process. 2020, 14, 1273–1280. [Google Scholar] [CrossRef]
- Cong, L.; Ding, S.; Wang, L.; Zhang, A.; Jia, W. Image segmentation algorithm based on superpixel clustering. IET Image Process. 2018, 12, 2030–2035. [Google Scholar] [CrossRef]
- Vansteenkiste, E.; Gautama, S.; Philips, W. Analysing multispectral textures in very high resolution satellite images. In Proceedings of the IGARSS 2004. 2004 IEEE International Geoscience and Remote Sensing Symposium, Anchorage, AK, USA, 20–24 September 2004; Volume 5, pp. 3062–3065. [Google Scholar] [CrossRef]
- Vansteenkiste, E.; Schoutteet, A.; Gautama, S.; Philips, W. Comparing color and textural information in very high resolution satellite image classification. In Proceedings of the 2004 International Conference on Image Processing, ICIP ’04, Singapore, 24–27 October 2004; Volume 5, pp. 3351–3354. [Google Scholar] [CrossRef]
- Zhang, J.; Cui, Y.; Lu, S.; Xiao, L. Multilayer image segmentation based on Gaussian weighted Euclidean distance and nonlinear interpolation. In Proceedings of the 2017 10th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Shanghai, China, 14–16 October 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Bayram, E.; Nabiyev, V. Image segmentation by using K-means clustering algorithm in Euclidean and Mahalanobis distance calculation in camouflage images. In Proceedings of the 2020 28th Signal Processing and Communications Applications Conference (SIU), Istanbul, Turkey, 5–7 October 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Selvarasu, N.; Nachiappan, A.; Nandhitha, N.M. Abnormality Detection from Medical Thermographs in Human Using Euclidean Distance Based Color Image Segmentation. In Proceedings of the 2010 International Conference on Signal Acquisition and Processing, Bangalore, India, 9–10 February 2010; pp. 73–75. [Google Scholar] [CrossRef]
- Yamashita, H.; Sonobe, R.; Hirono, Y.; Ikka, T. Dissection of hyperspectral reflectance to estimate nitrogen and chlorophyll contents in tea leaves based on machine learning algorithms. Sci. Rep. 2020, 10, 17360. [Google Scholar] [CrossRef]
- Oliveira, R.A.; Näsi, R.; Niemeläinen, O.; Nyholm, L.; Alhonoja, K.; Kaivosoja, J.; Jauhiainen, L.; Viljanen, N.; Nezami, S.; Markelin, L.; et al. Machine learning estimators for the quantity and quality of grass swards used for silage production using drone-based imaging spectrometry and photogrammetry. Remote Sens. Environ. 2020, 246, 111830. [Google Scholar] [CrossRef]
- Bauer, A.; Bostrom, A.G.; Ball, J.; Applegate, C.; Cheng, T.; Laycock, S.; Rojas, S.M.; Kirwan, J.; Zhou, J. Combining computer vision and deep learning to enable ultra-scale aerial phenotyping and precision agriculture: A case study of lettuce production. Hortic. Res. 2019, 6, 70. [Google Scholar] [CrossRef]
- Onishi, M.; Ise, T. Explainable identification and mapping of trees using UAV RGB image and deep learning. Sci. Rep. 2021, 11, 903. [Google Scholar] [CrossRef]
- Pavani, V.; Divya, K.; Likhitha, V.V.; Mounika, G.S.; Harshitha, K.S. Image Segmentation based Imperative Feature Subset Model for Detection of Vehicle Number Plate using K Nearest Neighbor Model. In Proceedings of the 2023 Third International Conference on Artificial Intelligence and Smart Energy (ICAIS), Coimbatore, India, 2–4 February 2023; pp. 704–709. [Google Scholar] [CrossRef]
- Zhang, J.H.; Chen, Y.J.; Kuo, Y.F.; Chen, C.Y. Fast automatic segmentation of cells and nucleuses in large-scale liquid-based monolayer smear images. In Proceedings of the 2017 International Conference on Image and Vision Computing New Zealand (IVCNZ), Christchurch, New Zealand, 4–6 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Mohamed, C.; Nsiri, B.; Abdelmajid, S.; Abdelghani, E.M.; Brahim, B. Deep Convolutional Networks for Image Segmentation: Application to Optic Disc detection. In Proceedings of the 2020 International Conference on Electrical and Information Technologies (ICEIT), Rabat, Morocco, 4–7 March 2020; pp. 1–3. [Google Scholar] [CrossRef]
- Colwell, R. Remote Sensing and Spatial Information. Nature 1981, 293, 364. [Google Scholar] [CrossRef]
- Li, C.; Balla-Arabe, S.; Yang-Song, F. Embedded Implementation of VHR Satellite Image Segmentation. In Architecture-Aware Optimization Strategies in Real-Time Image Processing; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2017; Chapter 6; pp. 113–139. [Google Scholar] [CrossRef]
- Lei, T.; Nandi, A.K. Image Segmentation for Remote Sensing Analysis. In Image Segmentation; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2022; Chapter 10; pp. 229–262. [Google Scholar] [CrossRef]
- Borcard, D.; Gillet, F.; Legendre, P. Numerical Ecology with R, 1st ed.; Use R! Springer: New York, NY, USA, 2011. [Google Scholar] [CrossRef]
- Lemenkova, P. Mapping Climate Parameters over the Territory of Botswana Using GMT and Gridded Surface Data from TerraClimate. ISPRS Int. J. Geo-Inf. 2022, 11, 473. [Google Scholar] [CrossRef]
- Neteler, M.; Beaudette, D.E.; Cavallini, P.; Lami, L.; Cepicky, J. GRASS GIS. In Open Source Approaches in Spatial Data Handling; Springer: Berlin/Heidelberg, Geramny, 2008; pp. 171–199. [Google Scholar] [CrossRef]
- Neteler, M.; Mitasova, H. Open Source GIS—A GRASS GIS Approach, 3rd ed.; Springer: New York, NY, USA, 2008. [Google Scholar]
- Petersen, G.; Fohrer, N. Flooding and drying mechanisms of the seasonal Sudd flood plains along the Bahr el Jebel in southern Sudan. Hydrol. Sci. J. 2010, 55, 4–16. [Google Scholar] [CrossRef]
- Sosnowski, A.; Ghoneim, E.; Burke, J.J.; Hines, E.; Halls, J. Remote regions, remote data: A spatial investigation of precipitation, dynamic land covers, and conflict in the Sudd wetland of South Sudan. Appl. Geogr. 2016, 69, 51–64. [Google Scholar] [CrossRef]
- Mulatu, D.W.; Ahmed, J.; Semereab, E.; Arega, T.; Yohannes, T.; Akwany, L.O. Stakeholders, Institutional Challenges and the Valuation of Wetland Ecosystem Services in South Sudan: The Case of Machar Marshes and Sudd Wetlands. Environ. Manag. 2022, 69, 666–683. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.; Jin, Z.; Michishita, R.; Cai, J.; Yue, T.; Chen, B.; Xu, B. Dynamic monitoring of wetland cover changes using time-series remote sensing imagery. Ecol. Inform. 2014, 24, 17–26. [Google Scholar] [CrossRef]
- Lemenkova, P. Dataset compilation by GRASS GIS for thematic mapping of Antarctica: Topographic surface, ice thickness, subglacial bed elevation and sediment thickness. Czech Polar Rep. 2021, 11, 67–85. [Google Scholar] [CrossRef]
- Lemenkova, P.; Debeir, O. Computing Vegetation Indices from the Satellite Images Using GRASS GIS Scripts for Monitoring Mangrove Forests in the Coastal Landscapes of Niger Delta, Nigeria. J. Mar. Sci. Eng. 2023, 11, 871. [Google Scholar] [CrossRef]
- Hofierka, J.; Mitášová, H.; Neteler, M. Chapter 17 Geomorphometry in GRASS GIS. In Geomorphometry; Developments in Soil Science; Hengl, T., Reuter, H.I., Eds.; Elsevier: Amsterdam, The Netherlands, 2009; Volume 33, pp. 387–410. [Google Scholar] [CrossRef]
- Lemenkova, P.; Debeir, O. GDAL and PROJ Libraries Integrated with GRASS GIS for Terrain Modelling of the Georeferenced Raster Image. Technologies 2023, 11, 46. [Google Scholar] [CrossRef]
- Di Vittorio, C.A.; Georgakakos, A.P. Land cover classification and wetland inundation mapping using MODIS. Remote Sens. Environ. 2018, 204, 1–17. [Google Scholar] [CrossRef]
- Lemenkova, P.; Debeir, O. Recognizing the Wadi Fluvial Structure and Stream Network in the Qena Bend of the Nile River, Egypt, on Landsat 8-9 OLI Images. Information 2023, 14, 249. [Google Scholar] [CrossRef]
- Campos-Taberner, M.; García-Haro, F.; Martínez, B.; Izquierdo-Verdiguier, E.; Atzberger, C.; Camps-Valls, G.; Gilabert, M.A. Understanding deep learning in land use classification based on Sentinel-2 time series. Sci. Rep. 2020, 10, 17188. [Google Scholar] [CrossRef]
- Lemenkova, P.; Debeir, O. R Libraries for Remote Sensing Data Classification by k-means Clustering and NDVI Computation in Congo River Basin, DRC. Appl. Sci. 2022, 12, 12554. [Google Scholar] [CrossRef]
- Mohamed, Y.; Savenije, H. Impact of climate variability on the hydrology of the Sudd wetland: Signals derived from long term (1900–2000) water balance computations. Wetl. Ecol. Manag. 2014, 22, 191–198. [Google Scholar] [CrossRef]
- Adamson, D.; Gasse, F.; Street, F.; Williams, M.A.J. Late Quaternary history of the Nile. Nature 1980, 288, 50–55. [Google Scholar] [CrossRef]
- Broun, A.F. Some Notes on the “Sudd”-Formation of the Upper Nile. J. Linn. Soc. Lond. Bot. 1905, 37, 51–58. [Google Scholar] [CrossRef]
- Chorowicz, J. The East African rift system. J. Afr. Earth Sci. 2005, 43, 379–410. [Google Scholar] [CrossRef]
- Lemenkova, P. Tanzania Craton, Serengeti Plain and Eastern Rift Valley: Mapping of geospatial data by scripting techniques. Est. J. Earth Sci. 2022, 71, 61–79. [Google Scholar] [CrossRef]
- Petersen, G.; Fohrer, N. Two-dimensional numerical assessment of the hydrodynamics of the Nile swamps in southern Sudan. Hydrol. Sci. J. 2010, 55, 17–26. [Google Scholar] [CrossRef]
- Sutcliffe, J.V. A Hydrological Study of the Southern Sudd Region of the Upper Nile. Hydrol. Sci. Bull. 1974, 19, 237–255. [Google Scholar] [CrossRef]
- Berry, L.; Whiteman, A.J. The Nile in the Sudan. Geogr. J. 1968, 134, 1–33. [Google Scholar] [CrossRef]
- El Shafie, A.G.A.; Elsayed Zeinelabdein, K.A.; Eisawi, A.A. Paleogeographic evolution and paleoenvironmental reconstruction of the Sudd area during the Early-Mid Holocene, Sudan. J. Afr. Earth Sci. 2011, 60, 13–18. [Google Scholar] [CrossRef]
- Salama, R.B. The evolution of the River Nile. The buried saline rift lakes in Sudan—I. Bahr El Arab Rift, the Sudd buried saline lake. J. Afr. Earth Sci. (1983) 1987, 6, 899–913. [Google Scholar] [CrossRef]
- Wolman, M.G.; Le Meur, C.; Giegengack, R.F. The Nile River: Geology, Hydrology, Hydraulic Society. In Large Rivers; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2022; Chapter 24; pp. 704–736. [Google Scholar] [CrossRef]
- Lindh, P.; Lemenkova, P. Permeability, compressive strength and Proctor parameters of silts stabilised by Portland cement and ground granulated blast furnace slag (GGBFS). Arch. Mech. Eng. 2022, 69, 667–692. [Google Scholar] [CrossRef]
- Whiteman, A.J. Geology of the Sudan Republic; Cambridge University Press: Cambridge, UK, 1971. [Google Scholar]
- Sutcliffe, J.V.; Parks, Y.P. Comparative water balances of selected African wetlands. Hydrol. Sci. J. 1989, 34, 49–62. [Google Scholar] [CrossRef]
- Di Vittorio, C.A.; Georgakakos, A.P. Hydrologic Modeling of the Sudd Wetland using Satellite-based Data. J. Hydrol. Reg. Stud. 2021, 37, 100922. [Google Scholar] [CrossRef]
- Woodward, J.C.; Macklin, M.G.; Krom, M.D.; Williams, M.A. The River Nile: Evolution and Environment. In Large Rivers; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2022; Chapter 14; pp. 388–432. [Google Scholar] [CrossRef]
- Sutcliffe, J.V.; Parks, Y.P. Hydrological modelling of the Sudd and Jonglei Canal. Hydrol. Sci. J. 1987, 32, 143–159. [Google Scholar] [CrossRef]
- Birkett, C.; Murtugudde, R.; Allan, T. Indian Ocean Climate event brings floods to East Africa’s lakes and the Sudd Marsh. Geophys. Res. Lett. 1999, 26, 1031–1034. [Google Scholar] [CrossRef]
- Mitchell, S.A. The status of wetlands, threats and the predicted effect of global climate change: The situation in Sub-Saharan Africa. Aquat. Sci. 2013, 75, 95–112. [Google Scholar] [CrossRef]
- Sutcliffe, J.; Brown, E. Water losses from the Sudd. Hydrol. Sci. J. 2018, 63, 527–541. [Google Scholar] [CrossRef]
- Gabr, S.; El Bastawesy, M. The Implications of the Topographic, Hydrologic and Tectonic Settings Onthe Development of Bahr El-Ghazal Catchment, South Sudan. Int. J. Water Resour. Arid. Environ. 2013, 2, 90–101. [Google Scholar]
- Benansio, J.S.; Funk, S.M.; Lino, J.L.; Balli, J.J.; Dante, J.O.; Dendi, D.; Fa, J.E.; Luiselli, L. Perceptions and attitudes towards climate change in fishing communities of the Sudd Wetlands, South Sudan. Reg. Environ. Chang. 2022, 22, 78. [Google Scholar] [CrossRef]
- Bailey, R.G. An appraisal of the fisheries of the Sudd wetlands, River Nile, southern Sudan. Aquac. Res. 1989, 20, 79–89. [Google Scholar] [CrossRef]
- Assessment, M.E. Ecosystems and Human Well-Being: Wetlands and Water; World Resources Institute: Washington, DC, USA, 2005. [Google Scholar]
- Thompson, J.R.; Polet, G. Hydrology and land use in a sahelian floodplain wetland. Wetlands 2000, 20, 639–659. [Google Scholar] [CrossRef]
- Fynn, R.W.S.; Murray-Hudson, M.; Dhliwayo, M.; Scholte, P. African wetlands and their seasonal use by wild and domestic herbivores. Wetl. Ecol. Manag. 2015, 23, 559–581. [Google Scholar] [CrossRef]
- Pacini, N.; Hesslerová, P.; Pokorný, J.; Mwinami, T.; Morrison, E.H.; Cook, A.A.; Zhang, S.; Harper, D.M. Papyrus as an ecohydrological tool for restoring ecosystem services in Afrotropical wetlands. Ecohydrol. Hydrobiol. 2018, 18, 142–154. [Google Scholar] [CrossRef]
- Hickley, P.; Bailey, R.G. Fish communities in the eastern, seasonal-floodplain of the Sudd, Southern Sudan. Hydrobiologia 1987, 144, 243–250. [Google Scholar] [CrossRef]
- Löw, F.; Stieglitz, K.; Diemar, O. Terrestrial oil spill mapping using satellite earth observation and machine learning: A case study in South Sudan. J. Environ. Manag. 2021, 298, 113424. [Google Scholar] [CrossRef]
- Collins, C.D.; Banks-Leite, C.; Brudvig, L.A.; Foster, B.L.; Cook, W.M.; Damschen, E.I.; Andrade, A.; Austin, M.; Camargo, J.L.; Driscoll, D.A.; et al. Fragmentation affects plant community composition over time. Ecography 2017, 40, 119–130. [Google Scholar] [CrossRef]
- Nagendra, H.; Lucas, R.; Honrado, J.P.; Jongman, R.H.; Tarantino, C.; Adamo, M.; Mairota, P. Remote sensing for conservation monitoring: Assessing protected areas, habitat extent, habitat condition, species diversity, and threats. Ecol. Indic. 2013, 33, 45–59. [Google Scholar] [CrossRef]
- Yan, Y.; Jarvie, S.; Zhang, Q.; Zhang, S.; Han, P.; Liu, Q.; Liu, P. Small patches are hotspots for biodiversity conservation in fragmented landscapes. Ecol. Indic. 2021, 130, 108086. [Google Scholar] [CrossRef]
- Martin, E.; Burgess, N. Sudd Flooded Grasslands. Online, OneEarth. 2023. Available online: https://www.oneearth.org/ecoregions/sudd-flooded-grasslands/ (accessed on 10 August 2023).
- Climatic Research Unit (CRU) of University of East Anglia. Climate Change Knowledge Portal. 2023. Available online: https://climateknowledgeportal.worldbank.org/country/sudan/climate-data-historical (accessed on 8 August 2023).
- Wessel, P.; Luis, J.F.; Uieda, L.; Scharroo, R.; Wobbe, F.; Smith, W.H.F.; Tian, D. The Generic Mapping Tools Version 6. Geochem. Geophys. Geosystems 2019, 20, 5556–5564. [Google Scholar] [CrossRef]
- Lemenkova, P. Console-Based Mapping of Mongolia Using GMT Cartographic Scripting Toolset for Processing TerraClimate Data. Geosciences 2022, 12, 140. [Google Scholar] [CrossRef]
- Lemenkova, P. Handling Dataset with Geophysical and Geological Variables on the Bolivian Andes by the GMT Scripts. Data 2022, 7, 74. [Google Scholar] [CrossRef]
- Hofierka, J.; Lacko, M.; Zubal, S. Parallelization of interpolation, solar radiation and water flow simulation modules in GRASS GIS using OpenMP. Comput. Geosci. 2017, 107, 20–27. [Google Scholar] [CrossRef]
- Jasiewicz, J.; Metz, M. A new GRASS GIS toolkit for Hortonian analysis of drainage networks. Comput. Geosci. 2011, 37, 1162–1173. [Google Scholar] [CrossRef]
- Jasiewicz, J. A new GRASS GIS fuzzy inference system for massive data analysis. Comput. Geosci. 2011, 37, 1525–1531. [Google Scholar] [CrossRef]
- Sorokine, A. Implementation of a parallel high-performance visualization technique in GRASS GIS. Comput. Geosci. 2007, 33, 685–695. [Google Scholar] [CrossRef]
- Neteler, M.; Bowman, M.H.; Landa, M.; Metz, M. GRASS GIS: A multi-purpose open source GIS. Environ. Model. Softw. 2012, 31, 124–130. [Google Scholar] [CrossRef]
- Food and Agriculture Organization of the United Nations (FAO UN). Land Cover Atlas of the Republic of South Sudan; FAO: Rome, Italy, 2023. [Google Scholar] [CrossRef]
- ReliefWeb. South Sudan: Floods—August 2014. 2014. Available online: https://m.reliefweb.int/disaster/14337/fl-2014-000123-ssd?lang=fr (accessed on 9 August 2023).
- ReliefWeb. Sudan: Floods—July 2018. 2018. Available online: https://reliefweb.int/disaster/fl-2018-000128-sdn (accessed on 11 August 2023).
- United Nations Office for the Coordination of Humanitarian Affairs (UN OCHA). South Sudan: Floods Emergency Response Strategy and Funding Requirements as of 14 November 2019. 2019. Available online: https://reliefweb.int/report/south-sudan/south-sudan-floods-emergency-response-strategy-and-funding-requirements-14 (accessed on 11 August 2023).
- United Nations Office for the Coordination of Humanitarian Affairs (UN OCHA). South Sudan Flooding Snapshot. 3 September 2020. Available online: https://www.unocha.org/ (accessed on 10 August 2023).
- South Sudan Crisis Group. Floods, Displacement and Violence in South Sudan. 2021. Available online: https://southsudan.crisisgroup.org/ (accessed on 10 August 2023).
- ReliefWeb. South Sudan: Floods 2021–2022. 2022. Available online: Https://reliefweb.int/disaster/fl-2021-000108-ssd (accessed on 10 August 2023).
- World Health Organization (WHO). Weekly Bulletin on Outbreaks and Other Emergencies. 2022. Available online: https://www.afro.who.int/health-topics/disease-outbreaks/outbreaks-and-other-emergencies-updates (accessed on 10 August 2023).
- Wilusz, D.C.; Zaitchik, B.F.; Anderson, M.C.; Hain, C.R.; Yilmaz, M.T.; Mladenova, I.E. Monthly flooded area classification using low resolution SAR imagery in the Sudd wetland from 2007 to 2011. Remote Sens. Environ. 2017, 194, 205–218. [Google Scholar] [CrossRef]
- Mohamed, Y.A.; van den Hurk, B.J.J.M.; Savenije, H.H.G.; Bastiaanssen, W.G.M. Impact of the Sudd wetland on the Nile hydroclimatology. Water Resour. Res. 2005, 41, 1–14. [Google Scholar] [CrossRef]
- Petersen, G.; Sutcliffe, J.V.; Fohrer, N. Morphological analysis of the Sudd region using land survey and remote sensing data. Earth Surf. Process. Landforms 2008, 33, 1709–1720. [Google Scholar] [CrossRef]




| Proj. | Zone | Dat. | Ellips. | N | S | W | E | Nsres | Ewres | Rows | Cols | Cells |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| UTM | 36 | WGS84 | WGS84 | 915,615 | 682,785 | 190,785 | 419,115 | 30 | 30 | 7761 | 7611 | 59,068,971 |
| Year | Class 1 | Class 2 | Class 3 | Class 4 | Class 5 | Class 6 | Class 7 | Class 8 | Class 9 | Class 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| 2015 | 1,501,537.8 | 243,574.1 | 317,231.5 | 17,077.0 | 241,763.7 | 734,523.3 | 447,070.3 | 528,704.9 | 466,546.4 | 281,024.0 |
| 2016 | 606,130.3 | 594,056.0 | 251,200.3 | 478,775.3 | 108,958.6 | 202,940.2 | 558,836.7 | 132,573.3 | 471,370.5 | 386,764.2 |
| 2017 | 344,062 | 395,409.0 | 458,500.0 | 458,986.4 | 526,807.8 | 540,912.0 | 761,353.5 | 468,330.1 | 664,728.9 | 873,149.5 |
| 2018 | 427,690.5 | 1,054,373.0 | 1,083,009.3 | 881,093.1 | 881,190.4 | 705,596.0 | 526,685.1 | 315,125.8 | 1,128,926.5 | 495,258.0 |
| 2019 | 376,759.4 | 332,136.8 | 251,513.7 | 982,144.2 | 124,956.3 | 757,819.1 | 1,090,100.0 | 625,188.6 | 109,114.2 | 689,025.5 |
| 2020 | 272,113.4 | 180,816.8 | 419,207.8 | 402,059.3 | 493,457.7 | 1,156,585.4 | 937,007.5 | 584,898.4 | 1,567,576.9 | 752,311.4 |
| 2021 | 416,413.7 | 234,023.4 | 189,669.0 | 414,165.1 | 490,691.7 | 578,060.7 | 118,864.8 | 467,398.9 | 283,889.0 | 355,065.7 |
| 2022 | 307,658.6 | 1,168,006.6 | 147,964.0 | 423,542.0 | 617,279.5 | 442,903.9 | 383,683.5 | 788,245.4 | 770,970.0 | 267,592.8 |
| 2023 | 0.0 | 29,203.0 | 1,599,665.7 | 434,129.5 | 1,012,475.1 | 1,032,878.3 | 934,255.0 | 1,214,757.6 | 167,164.5 | 687,965.9 |
| Year | Scene ID | Iterations | Segments |
|---|---|---|---|
| 8 January 2015 | 37 | 4515 | |
| 12 February 2016 | 37 | 4813 | |
| 31 December 2017 | 38 | 4114 | |
| 1 February 2018 | 36 | 5090 | |
| 8 March 2019 | 34 | 6021 | |
| 26 March 2020 | 39 | 3187 | |
| 29 March 2021 | 35 | 2445 | |
| 19 January 2022 | 35 | 4413 | |
| 14 May 2023 | 41 | 5181 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lemenkova, P. Image Segmentation of the Sudd Wetlands in South Sudan for Environmental Analytics by GRASS GIS Scripts. Analytics 2023, 2, 745-780. https://doi.org/10.3390/analytics2030040
Lemenkova P. Image Segmentation of the Sudd Wetlands in South Sudan for Environmental Analytics by GRASS GIS Scripts. Analytics. 2023; 2(3):745-780. https://doi.org/10.3390/analytics2030040
Chicago/Turabian StyleLemenkova, Polina. 2023. "Image Segmentation of the Sudd Wetlands in South Sudan for Environmental Analytics by GRASS GIS Scripts" Analytics 2, no. 3: 745-780. https://doi.org/10.3390/analytics2030040
APA StyleLemenkova, P. (2023). Image Segmentation of the Sudd Wetlands in South Sudan for Environmental Analytics by GRASS GIS Scripts. Analytics, 2(3), 745-780. https://doi.org/10.3390/analytics2030040