Abstract
A nonlocally perturbed linear Schrödinger equation with a small parameter was derived under the assumption of low-level fractionality by using one of the known general nonlocal wave equations with an infinite power-law memory. The problem of finding approximate symmetries for the equation is studied here. It has been shown that the perturbed Schrödinger equation inherits all symmetries of the classical linear equation. It has also been proven that approximate symmetries corresponding to Galilean transformations and projective transformations of the unperturbed equation are nonlocal. In addition, a special class of nonlinear, nonlocally perturbed Schrödinger equations that admits an approximate nonlocal extension of the Galilei group is derived. An example of constructing an approximately invariant solution for the linear equation using approximate scaling symmetry is presented.
Keywords:
Schrödinger equation; infinite memory; nonlocal perturbation; small parameter; approximate nonlocal symmetry MSC:
35Q41; 35R11; 76M60
1. Introduction
The classical Schrödinger equation is one of the most fundamental models in non-relativistic quantum mechanics [1,2]. It is a linear partial differential equation describing the behavior of any quantum mechanical system via a wave function. At the same time, there are numerous nonlinear extensions of the Schrödinger equation that are relevant in many fields. Generally, such equations describe wave phenomena in nonlinear and dispersive media. For instance, nonlinear extensions have been used in hydrodynamics [3], nonlinear optics [4] and plasma physics [5]. Perturbed Schrödinger equations have been investigated in [6,7] and by many other researchers. Moreover, during the last two decades, several time- and space-fractional generalizations of linear and nonlinear Schrödinger equations have been proposed [8,9,10,11]. Such equations belong to the class of fractional partial differential equations [12,13], which allow the description of wave propagation in complex systems with power memory and spatial nonlocality.
Lie symmetry analysis [14,15,16,17] is a powerful mathematical technique frequently used for studying Schrödinger-type equations, especially nonlinear ones. In 1972, Niederer [18] proved that the free Schrödinger equation admits a 12-parameter Lie symmetry group containing time and space translations, dilations, the Galilei group, and a group of projective transformations. Two years later, he obtained the general potential–independent form of the maximal kinematical invariance groups for Schrödinger equations with arbitrary potentials, and found a classifying relation for invariance groups depending on potential [19]. In the same year, Boyer [20] performed a full group classification for these equations. It is important to note that recently this result has been revised by Nikitin [21]. At the same time, the symmetry approach to the separation of variables for stationary and nonstationary Schrödinger equations has been developed [22,23,24] (see also [25] and references therein). This approach is based both on classical Lie point symmetries and on higher (or Lie-Bäcklund) symmetries [16,26]. Higher symmetries of the Schrödinger equation with an arbitrary potential have been investigated, in particular, in [27,28,29]. We also mention here some recent papers on the investigation of the symmetry properties and construction of invariant solutions for time-dependent and time-independent Schrödinger equations [30,31,32,33].
Symmetry properties of nonlinear Schrödinger equations have been investigated by many researchers. Here we mention only some of them. Gagnon and Winternitz studied a generalized Schrödinger equation with a linear combination of the cubic and quintic terms in 3+1 dimensions. Lie symmetries of this equation have been obtained in [34], and different exact invariant solutions have been constructed in [35,36]. In [37], these authors analyzed the symmetry properties of a variable-coefficient nonlinear Schrödinger equation with three arbitrary complex functions in dimensions. Classical Lie point symmetries and invariant solutions, as well as higher symmetries, have been obtained by Fushchich et al. [29,38,39] for different classes of nonlinear Schrödinger-type equations (see also [40] and references therein). Results on symmetry group classification for nonlinear Schrödinger equations can be found in [41,42,43,44,45]. In [46], approximate symmetries for a perturbed nonlinear equation have been studied. For some more recent results on symmetry analysis we refer to recent papers [47,48,49].
During the last two decades, basic methods of the classical Lie group analysis have been extended to fractional differential equations (see [50,51,52] and references therein). In [53,54,55,56,57,58,59], these methods were successfully applied for investigating symmetry properties and finding exact solutions of time- and space-fractional Schrödinger equations. It is worth noting that fractional-order equations always have much fewer Lie point symmetries than integer-order ones. In particular, any time-fractional Schrödinger equation describing finite memory processes does not admit the group of time translations and the Galilei group. As a result, applying classical Lie group analysis methods to find exact solutions to fractional Schrödinger equations shows quite low efficiency.
Nevertheless, if the memory effect is weak in the modeled system, a corresponding small parameter can be introduced. For example, for time-fractional equations with a weak power-law memory, the order of fractional differentiation can be close to an integer. This is the so-called low-level fractionality case [60]. Such a fractional order can be written as the sum of an integer and a small parameter. As a result, the corresponding time-fractional equation can be approximated by a differential equation with a small nonlocal term. More details of such approximation technique can be found in [60,61,62,63].
At the end of the last century, Baikov, Gazizov and Ibragimov [64,65,66] developed the theory of approximate transformation groups (see also Part II in [17]). This theory gives the tools to investigate approximate symmetry properties of differential equations that have a small parameter. In [67,68,69], several methods of this theory were successfully extended to equations with nonlocal terms that arose during the approximation of time-fractional differential equations in the case of low-level fractionality. As a result, constructive algorithms for finding approximate symmetries and conservation laws for such equations have been developed. Note that the dimension of an approximate group of invariance for any perturbed equation with a small parameter is always larger than the dimension of an exact group of invariance for the corresponding unperturbed equation; therefore, much more approximate invariant solutions can be constructed.
In this paper, we dealt with the problem of finding approximate symmetries for a perturbed Schrödinger equation with a weak infinite power-law memory. Recently, Uchaikin [70,71] proved that the dynamics of an open system, which is considered as a subsystem of some closed Hamiltonian system, can be described by an integro-differential equation with a delayed time argument. This concept provides the physical background of the equation in question. We prove that the equation inherits all the symmetries of the classical Schrödinger equation. Moreover, we prove that approximate symmetries of the perturbed equation in question that corresponded to Galilean transformations and projective transformations of the unperturbed equation are nonlocal. To the best of this author’s knowledge, this is the first study on nonlocal symmetries for nonlocally perturbed equations obtained from fractional differential equations under the assumption of low-level fractionality. In addition, a class of nonlinear nonlocally perturbed Schrödinger equations that have approximate nonlocal Galilean-type symmetries is presented.
The paper is organized as follows. In Section 2, a formal approach to deriving a linear perturbed Schrödinger equation with infinite memory and low-level fractionality is proposed. Section 3 contains the results of an approximate symmetry analysis for this equation. A class of nonlinear Schrödinger equations with a small nonlocal term that have approximate nonlocal Galilean-type symmetries is discussed in Section 4. A semi-analytical example of finding an approximately invariant solution for the linear equation by using the obtained approximate scaling symmetry is given in Section 5. The last section contains a conclusion.
2. Perturbed Schrödinger Equation with a Weak Infinite Memory
It is well known that E. Schrödinger derived his famous equation from the optics-mechanics analogy [1,2]. Using this analogy for a particle, the representation for the phase velocity of a wave can be written (see, e.g., [1]) as
where is the angular frequency; m is the mass of the particle; U is the potential energy of the particle in an external field; and ℏ is the reduced Planck constant (or the Dirac constant).
Next, the wave function for a monochromatic harmonic wave is of the form
which satisfies the classical wave equation
Substituting (1) and (2) in (3), and using the formal association
we obtain the classical Schrödinger equation
However, it is interesting to note that function (2) is a particular solution both for the classical (3), and the more general wave equations with an infinite power-law memory
where
is the Liouville fractional integral of order [12]. Here is a dimensionless number.
Note that (6) can be considered as a particular case of the wave equation with an infinite memory
whenever
Equation (7) is well known and has been investigated, for example, in [72,73,74]. In particular, this equation describes wave propagation in an open system considered as a part of a closed Hamiltonian system. More details of this approach can be found in [70,71].
Substituting (2) into (6), we get
For , we can use following expressions (see Table 9.2 in [12]):
Since
we have
As a result, we obtained the equation
If , we have . Therefore, in this case (6) coincides with the classical wave Equation (3), and . Assuming that
where A and do not depend on , and , we can rewrite (9) as
In view of (1), we have
It follows from (8) that
Using this association and association (4), we obtained
This equation is a time-fractional generalization of the Shrödinger equation. If , it coincides with the classical Equation (5).
It is important to note that, generally, the second equality in (10) is physically quite restrictive. However, it is approximately valid for the case of a weak memory when is small enough. Then we can write () and . In this case, the following expansion holds (see [12]) for the Liouville fractional integral:
where is the Euler constant. Substituting this expansion in (11), we get
This equation is the Shrödinger equation with a small nonlocal perturbations corresponding to infinite memory. In this equation is a dimensionless small numerical parameter.
Assuming that , by the change of variables
we transform the Equation (12) to the simpler form
with and a small parameter . For simplicity, we call this equation the perturbed Schrödinger equation (PSE). If and , this equation coincides with the free Schrödinger equation
3. Approximate Symmetries for PSE
3.1. Problem Statement
It is known that the free Schrödinger Equation (14) is invariant under the extended Galilei group, also known as the Schrödinger group [34,40]. Let , . Here u, v are real functions. Then (14) can be rewritten as the system of linear PDEs
A basis for the Lie algebra admitted by this system is provided (see, e.g., [34]) by a time translation T, n spatial translations , n rotations , n Galilean transformations , one phase transformation M, two dilations I and D, and one projective transformation R:
where . Here summation over repeated indices is implied.
Since system (15) is linear, it also admits infinite transformations with the generator
where the functions and are solutions of the system
In this work, we investigated the question of how PSE (13), considered with , inherits the symmetries (16) of the unperturbed Equation (14). Similarly to (15), we can rewrite (13) with as the system
where we denote for convenience
Since is assumed to be a small parameter in (17), we can try to find approximate symmetries for this system in the form
where is a symmetry of unperturbed system (15), i.e., any generator from (16). We will not assume that the operator is local because (17) is a nonlocally perturbed system and therefore it should admit nonlocal approximate symmetries.
The operator X defined by (18) is an approximate symmetry of (17) if and only if
whenever u and v satisfy (17). Here the approximate equality means that , and denotes the prolongation of the operator X to all differential and integral variables in (17). We can rewrite the above system in a more convenient form:
To obtain the determining equations for the operator from system (19) in an explicit form, the prolongations of a point transformation group defined by the infinitesimal generator to the nonlocal expressions and have to be constructed. Further, we derive such prolongations for transformations defined by generators (16), and then find corresponding operators .
3.2. Groups of Translations and Rotations
Let . Then the corresponding infinitesimal transformations are
where a is a group parameter. Applying this transformation to , we have
Here we use the equality that follows from by a simple change of variable , and denotes the Laplace operator with respect to . Hence, the function is invariant under time translation, and therefore the corresponding prolongation of the generator T to is equal to zero. The same is valid for . Since T has zero prolongations to , , and , the equalities (19) are satisfied for . Thus, the system (17) inherits the symmetry T, i.e., PSE admits any time translation. Note that this is due to the full memory in this system.
Similarly, one can easily prove that generators and also have zero prolongations to and . As a result, system (17) inherits these symmetries, i.e., PSE admits spatial translations and rotations.
Since the perturbed system admits time and space translations, it has different traveling wave solutions [75,76]. Note that time-fractional generalizations of Schrödinger’s equation with finite memory does not have such solutions.
3.3. Galilean Transformations
Now let us consider one of the most interesting cases of Galilean transformations: . Corresponding infinitesimal transformations reads
where a is a group parameter.
At first, we find prolongations and of this group to integrals and , where
such that
For convenience, we introduce two vectors
By using the infinitesimal approach, we found from (21)
and therefore
Hence, the infinitesimal transformation of the integral has the form
Thus, we obtain the prolongation formula
Similarly, one can find the prolongation formula for the integral as
Now we can find prolongation of the Galilei group to the expressions and . Since
we can write
where and are defined by the prolongation formulae
Here is the total derivative to t. These formulae directly follow from the classical prolongation formulae to integer-order differential variables (see, e.g., [26]).
Substituting (22) into (24), we get
Thus, we can write
Similarly, substituting (23) in (25), we find
Prolongations of the generator to , , and are calculated by classical prolongation formulae. As a result, we found the prolonged generator in the form
where and are defined by (26) and (27). Substituting into (19), in view of system (17), we obtain
Due to the multiplier , this system should be approximately satisfied whenever u and v are the solutions of the unperturbed system (15).
We sought the operator in a quite general canonical form
where functions and depend on t, x, u, v, as well as on any derivatives and integrals of u and v. Then we can rewrite system (29) as the system of determining equations for the functions and :
Since the r.h.s. of equations in (32) contain the nonlocal operator L, the functions and should depend on nonlocal variables and . To identify these functions, we gave several helpful relations. First of all, we proved that . Indeed,
Next, by using this equality and system (15), we have
Therefore, if we set
system (32) takes the form
In view of system (15), it is easy to prove that a particular solution of this system is
Thus, we found that is a nonlocal operator of the form
We can also rewrite it as
As a result, we concluded that the perturbed system (17) had n nonlocal approximate symmetries
These symmetries are the nonlocal extensions of the generators of the Galilean transformations.
3.4. Group of Phase Transformation
Let us consider the case corresponding to the so-called phase transformation or to the rotation in the plane . Then the infinitesimal transformations are
Applying this transformation to , we have
So, we get
Similarly, it is easy to obtain
Thus, we have the following prolongation of the generator M:
Substituting into (19), in view of system (17), we get
It is easy to see that if , this system coincides with the initial perturbed system (17). It means that system (17) admits the phase transformation, i.e., this system has the Lie point symmetry M.
3.5. Groups of Dilations
Now we consider the dilation with the generator D. The corresponding infinitesimal transformations are
Then for we have
Similarly, for one can find
Hence, we can write the prolongation of the generator D as
Setting in (19), in view of system (17), we obtain the system of determining equations for the coordinates of the operator from (30) as
It is easy to prove that this system has the particular solution
Thus, the operator has the canonical form
or
As a result, we concluded that system (17) has the approximate Lie point symmetry
In the same way it can be proven that the perturbed system (17) also admits dilation with the generator I, which follows from the linearity of this system.
3.6. Group of Projective Transformations
At last, we find the approximate extension of the projective transformation R from (16). The infinitesimal transformation defined by R is
First, we consider the infinitesimal transformation of the integral .
Substituting (38) in (39), we get
By direct calculations it is easy to prove that for a smooth function the following equalities are satisfied:
and
We also have
or
By using these formulae, after simple algebra we obtain the prolongation formula for as
Similarly, we get
where is defined by the prolongation formula
Thus, we can write the prolongation of the generator R as
where , are defined by (40) and
These representations were found by using the classical prolongation formulae.
Setting in (19), in view of system (17), we obtain the following system of determining equations for the coordinates of the operator :
Here we take into account that due to system (17) and conditions
the following approximate equalities hold:
Note that system (42) corresponds to the first order of the small parameter .
Since the r.h.s. of equations in (42) contain nonlocal operators, the coordinates and of the operator also should be nonlocal. Here, we note that
and
Using these formulae, it is easy to prove that if we put
system (42) takes the form
A particular solution of this system is
Hence, we obtain the nonlocal operator
This operator can be also rewritten as
Thus, we find that the perturbed system (17) has approximate nonlocal symmetry
As a final remark, it should be noted that the perturbed system (17) also has the approximate symmetries , , , , , , , and . This result directly follows from (19) after the substitution . All these symmetries are trivial but they should be taken into account for finding approximate invariant solutions. In addition, due to linearity, system (17) has infinite approximate symmetries
where , , , and are a solution to the system
The results can be summarized as
Theorem 1.
The nonlocally perturbed system (17) inherits all symmetries of the unperturbed system (15). A corresponding basis of its approximate symmetry Lie algebra is provided by the exact local generators T, , , M, and I from (16), the local approximate generator from (36), nonlocal approximate generators and defined by (33) and (44), respectively, and corresponding local approximate generators , , , , , , , and . Also, this linear perturbed system has infinite approximate symmetries (45).
4. Nonlocally Perturbed Nonlinear Schrödinger Equation
Nonlinear Schrödinger equations play essential role in many areas of applied physics. An important class of such equations is invariant under the extended Galilei group. A basis of the Lie algebra corresponding to this group consists of the first 11 operators from (16): T, , , and M. In particular, this group is admitted by any nonlinear Schrödinger equation of the form
where F is an arbitrary function (see, e.g., [34]).
Let us consider a corresponding nonlinear generalisation of PSE (13) of the form
In this section, we solve the problem of finding the function for which (46) admits approximate symmetries of the form (18) corresponding to the extended Galilei group.
We will assume that the function F depends on a small parameter and can be written as . As previously, let , . Also, we set and . Here u, v, , , and are real functions. Then (46) can be rewritten as the system
The corresponding system of determining equations for the coordinates and of the operator from (30) can be written as
Like the previous section, it is easy to prove that (47) admits Lie point transformation groups with the generators T, and . In all of these cases we have and . For the phase transformation M, we should set , where is defined by (35). Then (48) takes the form
It can be seen that for and the system (49) coincides with the system (47). Therefore, the nonlinear nonlocal system (47) has symmetry M for any functions , , and . As a result, the corresponding nonlocally perturbed nonlinear Schrödinger Equation (46) admits the phase transformation for any function F.
At last, we consider approximate extensions of Galilean transformations. Let in (48), where is defined by (28). Then, in view of the system (47), we have
If and , this system coincides with (31). As a result, we conclude that in this case the system (47) admits nonlocal approximate symmetries from (33).
Thus, the nonlocally perturbed nonlinear Schrödinger Equation (46) with has the Lie point symmetries T, , , M, and the nonlocal approximate symmetries .
5. An Example of Approximate Solution
The symmetries in the previous section can be used to find approximate solutions to the system (17). To illustrate this possibility, we constructed an approximately invariant solution corresponding to the approximate scaling symmetry defined by (36). For simplicity, we considered the case of one spatial dimension ().
First of all, it was necessary to find approximate invariants of the generator . In the theory of approximate transformation groups [17] it has been proven that such invariants are written in the form
and they are determined by the equation
In view of (36), this equation can be rewritten as the system
Solving this system, we get three invariants:
As a result, we obtain the following form for the approximately invariant solutions of the system (17):
where .
Substituting (50) into (17) and splitting the equations with respect to , after simplification, we get
System (51) is a linear system of ordinary differential equations with respect to functions , , , . It can be also considered to be a first-order system with respect to functions
Integration of the first and second equations in (51) yielded
Further, we restricted our consideration to the case , . The corresponding particular solution reads
Integrating corresponding equations in (52), we obtained
In view of (53), the third and fourth equations in (51) take the form
where
Integrals in (56), (57) can be evaluated in closed form. In particular, for we have
Here
are the sine and the cosine integrals, respectively. Substituting these representations for integrals in (56), (57), and performing the necessary calculations, we obtained
The general solution of system (55) with (58), (59) is
where and are arbitrary constants. For certainty, we set . Both functions are plotted for in Figure 1.
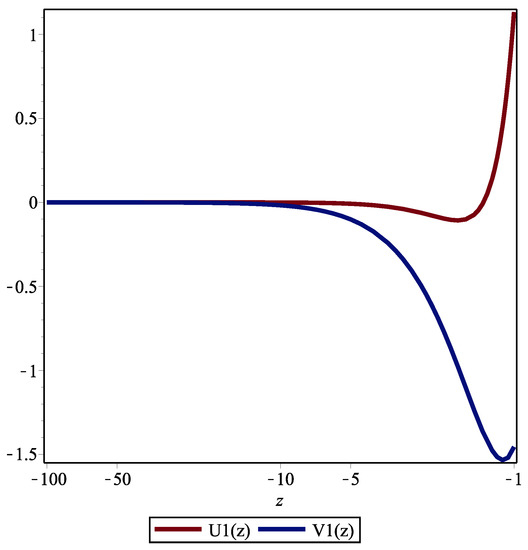
Figure 1.
Graphs of functions and .
From (52) we have
where and are defined by (60) and (61), respectively. Note that these integrals could not be evaluated explicitly, so we used numerical computations in Maple software.
The results of numerical computations for functions and are given in Figure 2 and Figure 3, respectively. The graphs of and from (54) are presented on the same figures. It can be seen that the functions and were positive for , whereas the functions and were negative. Therefore, in this example, the nonlocal terms in (17) were related to the opposite dynamics of the system.
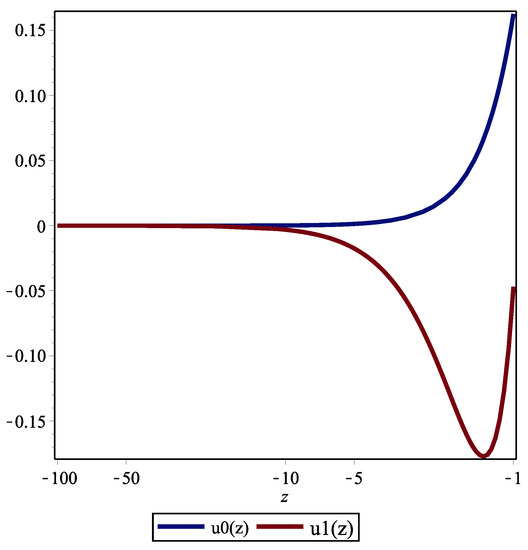
Figure 2.
Graphs of functions and .
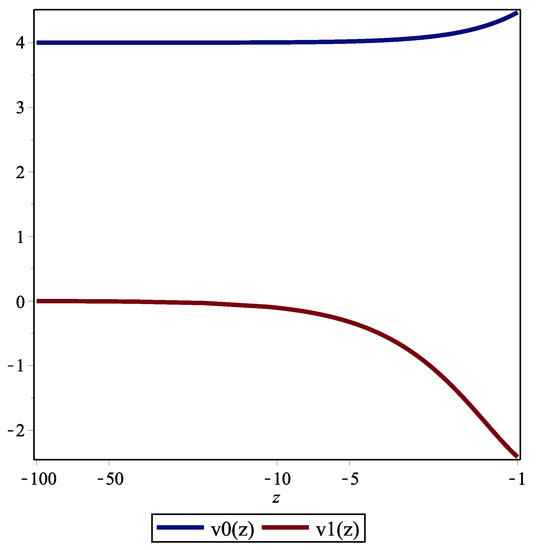
Figure 3.
Graphs of functions and .
To study the influence of a small parameter on the time dynamics of the system, approximate solutions of the form (50) were found at the point for three different values of : 0.05, 0.1 and 0.2. The results of numerical computations are presented in Figure 4 and Figure 5. It can be seen that increasing the small parameter affected the dynamics significantly.
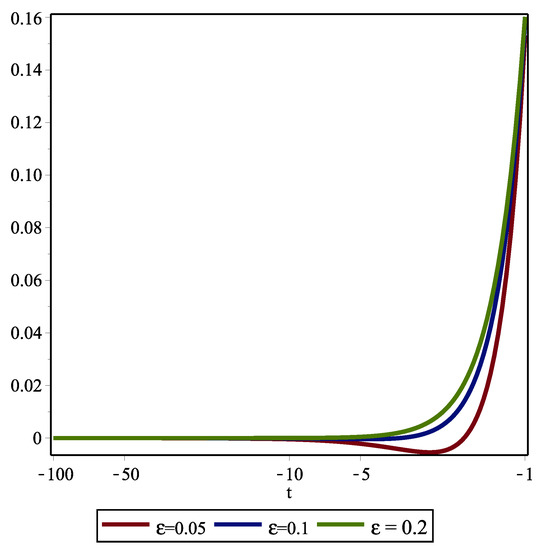
Figure 4.
Graphs of approximate solutions of the form (50) at the point for different values of .
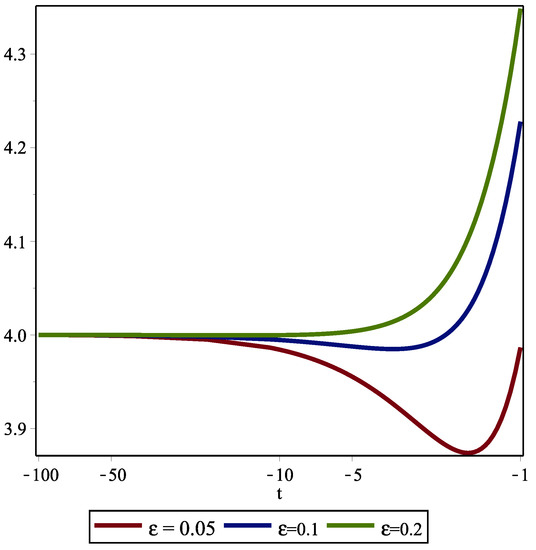
Figure 5.
Graphs of approximate solutions of the form (50) at the point for different values of .
6. Conclusions
A nonlocally perturbed Schrödinger equation was derived in this paper by using a generalized nonlocal wave equation, which is used to investigate wave phenomena in an open system considered to be part of a closed Hamiltonian system under a weak coupling of these systems leading to weak infinite power-law memory effects. It has been proved that the linear nonlocally perturbed Schrödinger equation inherits all symmetries of the classical equation. In particular, this equation admits exact local groups of time and space translations, as well as the group of rotations. It means that the equation in question has exact classical, fundamental conservation laws, such as those for energy, momentum, and angular momentum. Moreover, the equation admits the exact group of phase transformations, and therefore the local conservation law for the probability density is fulfilled. The Galilei group and a group of projective transformations were inherited by the equation in a nonlocal sense. It meant that the corresponding conservation laws should also have been nonlocal ones. The group of dilations was inherited as an approximate local group of dilations; therefore, the equation possesses the property of approximate self-similarity.
Based on the exact and approximate symmetries, various approximate invariant solutions can be constructed for the nonlocally perturbed Schrödinger equation. Since this equation has exact time and space translation symmetries, it has different classes of traveling wave solutions. By using the approximate local scaling symmetry, a class of approximate self-similar solutions can be constructed for this equation. An example of a solution belonging to this class is presented in this paper. Next, the nonlocal Galilean-type and projective-type symmetries give the opportunity to find nonlocal approximate solutions for the equation. Classification of approximately invariant solutions can be performed based on an optimal system of subalgebras, which should be constructed for approximate symmetry algebra. These are topics for further research.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The author is grateful to anonymous reviewers for their helpful comments.
Conflicts of Interest
The author declares no conflict of interest.
References
- Fermi, E. Notes on Quantum Mechanics; University of Chicago Press: Chicago, IL, USA, 1995. [Google Scholar]
- Landau, L.D.; Lifshitz, E.M. Quantum Mechanics (Non-Relativistic Theory). Volume 3 of Course of Theoretical Physics; Butterworth-Heinemann: Oxford, UK, 2003. [Google Scholar]
- Zakharov, V.E. Stability of periodic waves of finite amplitude on the surface of a deep fluid. J. Appl. Mech. Tech. Phys. 1968, 9, 190–194. [Google Scholar] [CrossRef]
- Hasegawa, A.; Kodama, Y. Amplification and reshaping of optical solitons in a glass fiber-I. Opt. Lett. 1982, 7, 285–287. [Google Scholar] [CrossRef]
- Goldman, M.V. Strong turbulence of plasma waves. Rev. Mod. Phys. 1984, 56, 709–735. [Google Scholar] [CrossRef]
- Ding, Y.; Lin, F. Solutions of perturbed Schrödinger equations with critical nonlinearity. Calc. Var. Partial Differ. Equ. 2007, 30, 231–249. [Google Scholar] [CrossRef]
- Bartsch, T.; Pankov, A.; Wang, Z.Q. Nonlinear Schrödinger equations with steep potential well. Commun. Contemp. Math. 2001, 3, 549–569. [Google Scholar] [CrossRef]
- Laskin, N. Fractional Schrödinger equation. Phys. Rev. E 2002, 66, 056108. [Google Scholar] [CrossRef]
- Naber, M. Time fractional Schrödinger equation. J. Math. Phys. 2004, 45, 3339–3352. [Google Scholar] [CrossRef]
- Longhi, S. Fractional Schrödinger equation in optics. Opt. Lett. 2015, 40, 1117–1120. [Google Scholar] [CrossRef]
- Malomed, B.A. Optical solitons and vortices in fractional media: A mini-review of recent results. Photonics 2021, 8, 353. [Google Scholar] [CrossRef]
- Samko, S.; Kilbas, A.; Marichev, O. Fractional Integrals and Derivatives. Theory and Applications; Gordon & Breach Sci. Publishers: London, UK, 1993. [Google Scholar]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Ovsyannikov, L.V. Group Analysis of Differential Equations; Academic Press: New York, NY, USA, 1982. [Google Scholar]
- Olver, P. Applications of Lie Groups to Differential Equations; Springer: New York, NY, USA, 1986. [Google Scholar]
- Bluman, G.; Kumei, S. Symmetries and Differential Equations; Springer: Berlin, Germany, 1989. [Google Scholar]
- Ibragimov, N.H. Transformation Groups and Lie Algebras; World Scientific: Singapore, 2013. [Google Scholar]
- Niederer, U. The maximal kinematical invariance group of the free Schrödinger equation. Helv. Phys. Acta 1972, 45, 802–810. [Google Scholar]
- Niederer, U. The maximal kinematical invariance groups of Schrödinger equations with arbitrary potentials. Helv. Phys. Acta 1974, 47, 167–172. [Google Scholar]
- Boyer, C.P. The maximal kinematical invariance group for an arbitrary potential. Helv. Phys. Acta 1974, 47, 589–605. [Google Scholar]
- Nikitin, A. The maximal "kinematical" invariance group for an arbitrary potential revised. J. Math. Phys. Anal. Geom. 2018, 14, 519–531. [Google Scholar] [CrossRef]
- Bagrov, V.G.; Shapovalov, V.N.; Meshkov, A.G. Separation of variables in the stationary Schrödinger equation. Sov. Phys. J. 1972, 15, 1115–1119. [Google Scholar]
- Shapovalov, V.; Sukhomlin, N. Separation of variables in the nonstationary Schrödinger equation. Sov. Phys. J. 1974, 17, 1718–1722. [Google Scholar] [CrossRef]
- Boyer, C.; Kalnins, E.; Miller, W., Jr. Lie theory and separation of variables, 6: The equation iUt + Δ2U = 0. J. Math. Phys. 1975, 16, 499–511. [Google Scholar] [CrossRef]
- Miller, W., Jr. Symmetry and Separation of Variables; Addison-Wesley Publishing Co., Inc.: Reading, MA, USA, 1977. [Google Scholar]
- Ibragimov, N.H. Transformation Groups Applied to Mathematical Physics; Reidel: Dordrecht, The Netherlands, 1985. [Google Scholar]
- Beckers, J.; Debergh, N.; Nikitin, A.G. More on symmetries of the Schrödinger equation. J. Phys. A Math. Gen. 1991, 24, L1269–L1275. [Google Scholar] [CrossRef]
- Nikitin, A.G.; Onufriichuk, S.P.; Fushchich, V.I. Higher symmetries of the Schrödinger equation. Theor. Math. Phys. 1992, 91, 514–521. [Google Scholar] [CrossRef]
- Fushchych, W.I.; Nikitin, A.G. Higher symmetries and exact solutions of linear and nonlinear Schrödinger equation. J. Math. Phys. 1997, 38, 5944–5959. [Google Scholar] [CrossRef][Green Version]
- Cervero, J.M.; Polo, P.P. The one dimensional Schrödinger equation: Symmetries, solutions and Feynman propagators. Eur. J. Phys. 2016, 37, 055401. [Google Scholar] [CrossRef]
- Boldyreva, M.; Magazev, A. Symmetry of the time-dependent Schrödinger equation in electromagnetic fields invariant under three-dimensional E(3) subgroups. Russ. Phys. J. 2019, 62, 224–231. [Google Scholar] [CrossRef]
- Nikitin, A. Symmetries of Schrödinger equation with scalar and vector potentials. J. Phys. A Math. Theor. 2020, 53, 455202. [Google Scholar] [CrossRef]
- Magazev, A.A.; Boldyreva, M.N. Schrödinger equations in electromagnetic fields: Symmetries and noncommutative integration. Symmetry 2021, 13, 1527. [Google Scholar] [CrossRef]
- Gagnon, L.; Winternitz, P. Lie symmetries of a generalised non-linear Schrödinger equation: I. The symmetry group and its subgroups. J. Phys. A Math. Gen. 1988, 21, 1493–1511. [Google Scholar] [CrossRef]
- Gagnon, L.; Winternitz, P. Lie symmetries of a generalised non-linear Schrödinger equation: II. Exact solutions. J. Phys. A Math. Gen. 1989, 22, 469–497. [Google Scholar] [CrossRef]
- Gagnon, L.; Winternitz, P. Exact solutions of the cubic and quintic nonlinear Schrödinger equation for a cylindrical geometry. Phys. Rev. A 1989, 39, 296–306. [Google Scholar] [CrossRef] [PubMed]
- Gagnon, L.; Winternitz, P. Symmetry classes of variable coefficient nonlinear Schrödinger equations. J. Phys. A Math. Gen. 1993, 26, 7061–7076. [Google Scholar] [CrossRef]
- Fuschich, W.I.; Serov, N.I. On some exact solutions of the three-dimensional non-linear Schrödinger equation. J. Phys. A Math. Gen. 1987, 20, L929–L934. [Google Scholar] [CrossRef]
- Fushchich, V.I.; Cherniga, R.M. Galilei invariant non-linear equations of Schrödinger type and their exact solutions. I Ukr. Math. J. 1989, 41, 1161–1167. [Google Scholar] [CrossRef]
- Fushchich, W.I.; Shtelen, W.M.; Serov, N.I. Symmetry Analysis and Exact Solutions of Equations of Nonlinear Mathematical Physics; Springer: Dordrecht, The Netherlands, 1993. [Google Scholar]
- Zhdanov, R.; Roman, O. On preliminary symmetry classification of nonlinear Schrödinger equation with some applications of Doebner–Goldin models. Rep. Math. Phys. 2000, 45, 273–291. [Google Scholar] [CrossRef]
- Nikitin, A.G.; Popovych, R.O. Group classification of nonlinear Schrödinger equations. Ukr. Math. J. 2001, 53, 1255–1265. [Google Scholar] [CrossRef]
- Ivanova, N. Symmetry of nonlinear Schrödinger equations with harmonic oscillator type potential. Proc. Inst. Math. NAS Ukr. 2002, 43 Part 1, 149–150. [Google Scholar]
- Nikitin, A.G.; Zasadko, T.M. Group classification of Schrödinger equations with position dependent mass. J. Phys. A Math. Theor. 2016, 49, 365204. [Google Scholar] [CrossRef][Green Version]
- Paliathanasis, A.; Leon, G.; Leach, P.G.L. Lie symmetry classification and qualitative analysis for the fourth-order Schrödinger equation. arXiv 2022, arXiv:2205.14873. [Google Scholar] [CrossRef]
- Shui-Ying, X.; Ji, L. Approximate symmetry reduction for perturbed nonlinear Schrödinger equation. Chin. Phys. B 2010, 19, 0540201. [Google Scholar] [CrossRef]
- Bansal, A.; Biswas, A.; Zhou, Q.; Babatin, M. Lie symmetry analysis for cubic-quartic nonlinear Schrödinger’s equation. Optik 2018, 169, 12–15. [Google Scholar] [CrossRef]
- Rizvi, S.; Afzal, I.; Ali, K.; Younis, M. Stationary solutions for nonlinear Schrödinger’s equations by Lie group analysis. Acta Phys. Pol. A 2019, 136, 187–189. [Google Scholar] [CrossRef]
- Devi, P.; Singh, K. Lie Symmetry analysis of the nonlinear Schrödinger equation with time dependent variable coefficients. Int. J. Appl. Comput. Math. 2021, 7, 23. [Google Scholar] [CrossRef]
- Gazizov, R.K.; Kasatkin, A.A.; Lukashchuk, S.Y. Symmetries and group invariant solutions of fractional ordinary differential equations. In Handbook of Fractional Calculus with Applications. Volume 2 Fractional Differential Equations; Kochubei, A., Luchko, Y., Eds.; De Gruyter: Berlin, Germany, 2019; pp. 65–90. [Google Scholar]
- Gazizov, R.K.; Kasatkin, A.A.; Lukashchuk, S.Y. Symmetries, conservation laws and group invariant solutions of fractional PDEs. In Handbook of Fractional Calculus with Applications. Volume 2 Fractional Differential Equations; Kochubei, A., Luchko, Y., Eds.; De Gruyter: Berlin, Germany, 2019; pp. 353–382. [Google Scholar]
- Hashemi, M.S.; Baleanu, D. Lie Symmetry Analysis of Fractional Differential Equation; Chapman and Hall/CRC: New York, NY, USA, 2020. [Google Scholar]
- Zedan, H.A.; Shapll, S.; Abdel-Malek, A. Invariance of the nonlinear generalized NLS equation under the Lie group of scaling transformations. Nonlinear Dyn. 2015, 82, 2001–2005. [Google Scholar] [CrossRef]
- Lashkarian, E.; Hejazi, S.R. Exact solutions of the time fractional nonlinear Schrödinger equation with two different methods. Math. Methods Appl. Sci. 2018, 41, 2664–2672. [Google Scholar] [CrossRef]
- Fu, C.; Lu, C.N.; Yang, H.W. Time-space fractional (2+1) dimensional nonlinear Schrödinger equation for envelope gravity waves in baroclinic atmosphere and conservation laws as well as exact solutions. Adv. Diff. Equ. 2018, 2018, 56. [Google Scholar] [CrossRef]
- Hussain, Q.; Zaman, F.D.; Kara, A.H. Invariant analysis and conservation laws of time fractional Schrödinger equations. Optik 2020, 206, 164356. [Google Scholar] [CrossRef]
- Hussain, Q.; Zaman, F.D.; Bokhari, A.H.; Kara, A.H. On a study of symmetries and conservation laws of a class of time fractional Schrödinger equations with nonlocal nonlinearities. Optik 2020, 224, 165619. [Google Scholar] [CrossRef]
- Yu, J.; Feng, Y. Lie symmetry analysis and exact solutions of space-time fractional cubic Schrödinger equation. Int. J. Geom. Methods Mod. Phys. 2022, 19, 2250077. [Google Scholar] [CrossRef]
- Qin, F.; Feng, W.; Zhao, S. Lie symmetry group, invariant subspace, and conservation law for the time-fractional derivative nonlinear Schrödinger equation. Mathematics 2022, 10, 2170. [Google Scholar] [CrossRef]
- Tarasov, V.E.; Zaslavsky, G.M. Dynamics with low-level fractionality. Phys. A 2006, 368, 399–415. [Google Scholar] [CrossRef]
- Tofighi, A.; Golestani, A. A perturbative study of fractional relaxation phenomena. Phys. A 2008, 387, 1807–1817. [Google Scholar] [CrossRef]
- Lukashchuk, S.Y. An approximate solution method for ordinary fractional differential equations with the Riemann–Liouville fractional derivatives. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 390–400. [Google Scholar] [CrossRef]
- Lukashchuk, S.Y. Approximation of ordinary frational differential equations by differential equations with a small parameter. Vestn. Udmurt. Univ. Mat. Mekhanika Komp’yuternye Nauk. 2017, 27, 515–531. [Google Scholar] [CrossRef]
- Baikov, V.A.; Gazizov, R.K.; Ibragimov, N.H. Approximate symmetries. Mat. Sb. 1989, 64, 427–441. [Google Scholar] [CrossRef]
- Baikov, V.A.; Gazizov, R.K.; Ibragimov, N.H. Perturbation methods in group analysis. J. Sov. Math. 1991, 55, 1450–1490. [Google Scholar] [CrossRef]
- Gazizov, R.K. Lie algebras of approximate symmetries. Nonlinear Math. Phys. 1996, 3, 96–101. [Google Scholar] [CrossRef]
- Gazizov, R.K.; Lukashchuk, S.Y. Approximations of fractional differential equations and approximate symmetries. IFAC-PapersOnLine 2017, 50, 14022–14027. [Google Scholar] [CrossRef]
- Lukashchuk, S.Y.; Saburova, R.D. Approximate symmetry group classification for a nonlinear fractional filtration equation of diffusion-wave type. Nonlinear Dyn. 2018, 93, 295–305. [Google Scholar] [CrossRef]
- Lukashchuk, S.Y. Approximate conservation laws for fractional differential equations. Commun. Nonlinear Sci. Numer. Simul. 2019, 68, 147–159. [Google Scholar] [CrossRef]
- Uchaikin, V.V. On time-fractional representation of an open system response. Fract. Calc. Appl. Anal. 2016, 19, 1306–1315. [Google Scholar] [CrossRef]
- Uchaikin, V.V. Atoms and photons: Kinetic equations with delay. J. Math. Sci. 2022, 260, 335–370. [Google Scholar] [CrossRef]
- Dafermos, C.M. An abstract Volterra equation with applications to linear viscoelasticity. J. Differ. Equ. 1970, 7, 554–569. [Google Scholar] [CrossRef]
- Fabrizio, M.; Giorgi, C.; Pata, V. A new approach to equations with memory. Arch. Ration. Mech. Anal. 2010, 198, 189–232. [Google Scholar] [CrossRef]
- Anaya, K.; Messaoudi, S.A.; Mustapha, K. Decay rate of a weakly dissipative viscoelastic plate equation with infinite memory. Arab. J. Math. 2021, 10, 31–39. [Google Scholar] [CrossRef]
- Lu, D.; Seadawy, A.R.; Ali, A. Applications of exact traveling wave solutions of Modified Liouville and the Symmetric Regularized Long Wave equations via two new techniques. Results Phys. 2018, 9, 1403–1410. [Google Scholar] [CrossRef]
- Wu, Q.; Pan, C.; Wang, H. Speed determinacy of the traveling waves for a three species time-periodic Lotka–Volterra competition system. Math. Methods Appl. Sci. 2022, 45, 6080–6095. [Google Scholar] [CrossRef]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).