


CORE: Cultivation of Collaboration Skills via Educational Robotics

 ,
,  ,
,  and
and 
Abstract
1. Introduction
2. Relevant Literature
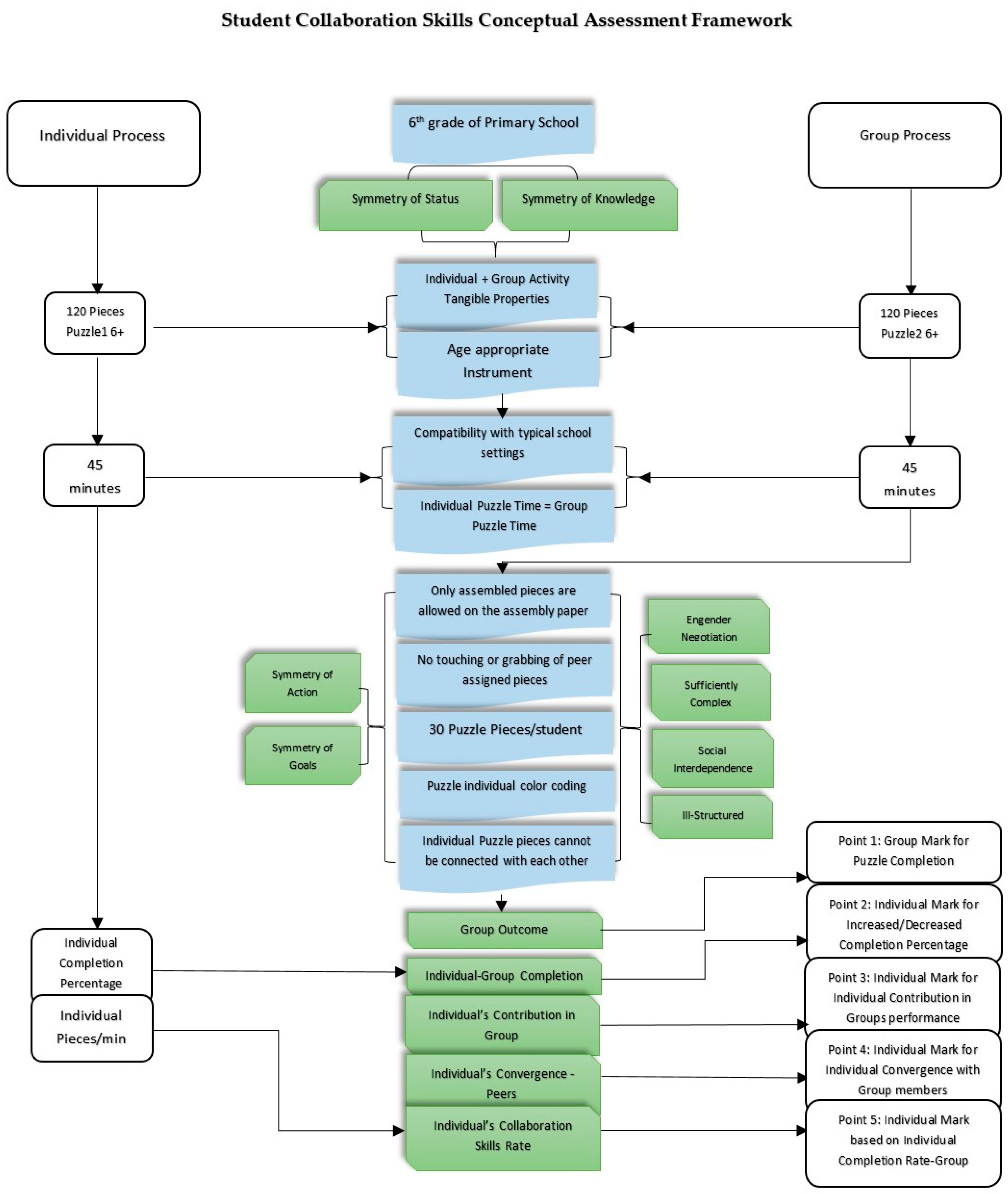
3. Assessing Collaboration Skills—COPE Test
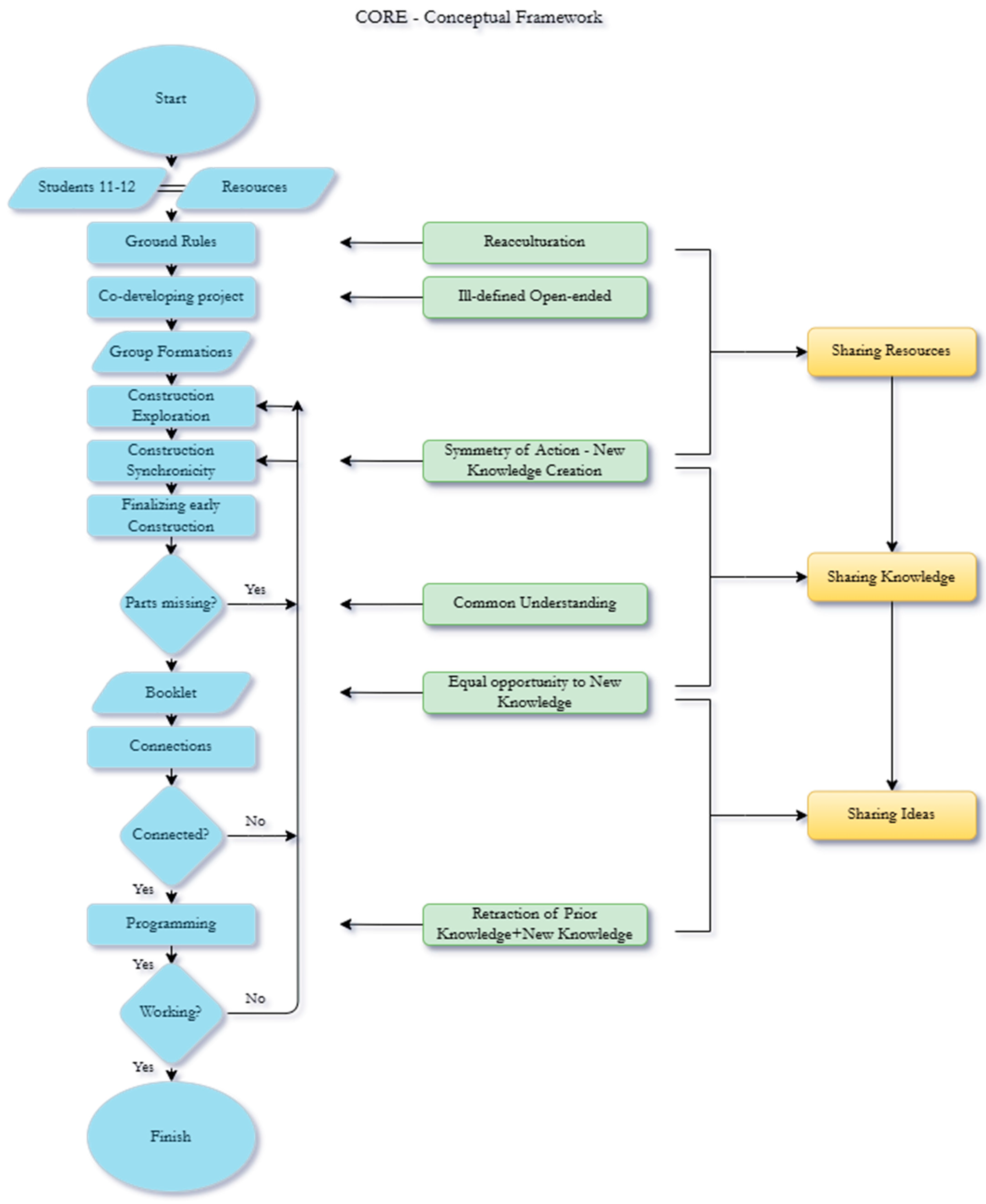
4. The CORE Methodology
- Re-acculturation;
- Co-creation of project with ill-defined attributes and open-ended properties;
- High synchronicity—instruction;
- Common understanding—encouragement;
- Booklet—equal opportunity for new “foundational knowledge”;
- Retraction of prior knowledge (scratch programming).
5. Methods and Procedures
5.1. Context and Participants
5.1.1. Ethical Approval
5.1.2. Study Location and Duration
5.1.3. Participant Selection
5.2. Procedures
5.2.1. Pre-Test
5.2.2. Main Study
5.2.3. Experimental Conditions and Preparations
5.2.4. Post-Test
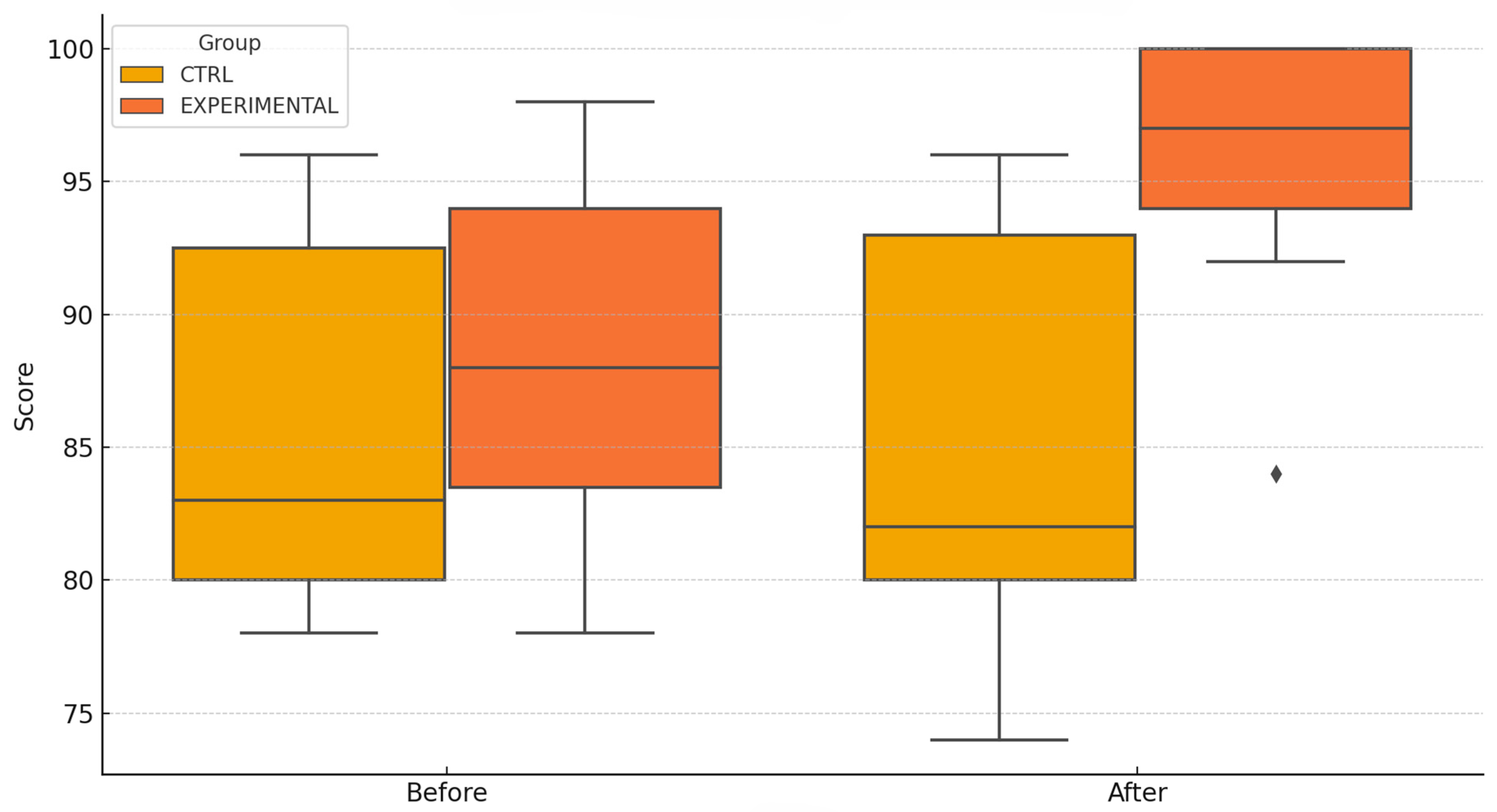
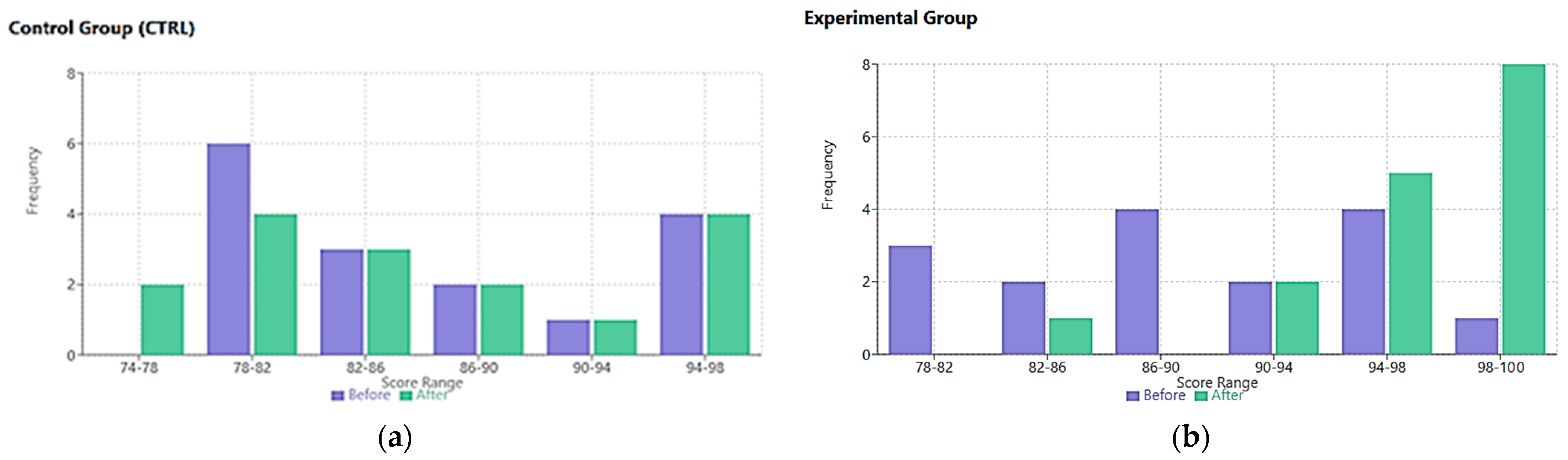
5.3. Results
Descriptive Statistics
5.4. Non-Parametric Tests
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nemiro, J.E. Building Collaboration Skills in 4th- to 6th-Grade Students through Robotics. J. Res. Child. Educ. 2020, 35, 351–372. [Google Scholar] [CrossRef]
- Dillenbourg, P. What do you mean by collaborative learning? In Collaborative-Learning: Cognitive and Computational Approaches; Dillenbourg, P., Ed.; Elsevier: Oxford, UK, 1999; pp. 1–19. [Google Scholar]
- House, S.K.; Wahl, L.L. Intercollegiate collaboration to promote interprofessional education (IPE). Teach. Learn. Nurs. 2021, 16, 281–284. [Google Scholar] [CrossRef]
- Liu, L.; Hao, J.; von Davier, A.A.; Kyllonen, P.; Zapata-Rivera, J.D. A Tough Nut to Crack: Measuring Collaborative Problem Solving. In Handbook of Research on Technology Tools for Real-World Skill Development; Rosen, Y., Ferrara, S., Mosharraf, M., Eds.; IGI Global: Hershey, PA, USA, 2016; pp. 344–359. [Google Scholar] [CrossRef]
- Evans, C.M. Measuring Student Success Skills: A Review of the Literature on Collaboration; National Center for the Improvement of Educational Assessment: Dover, NH, USA, 2020. [Google Scholar]
- Thornhill-Miller, B.; Camarda, A.; Mercier, M.; Burkhardt, J.-M.; Morisseau, T.; Bourgeois-Bougrine, S.; Vinchon, F.; El Hayek, S.; Augereau-Landais, M.; Mourey, F.; et al. Creativity, Critical Thinking, Communication, and Collaboration: Assessment, Certification, and Promotion of 21st Century Skills for the Future of Work and Education. J. Intell. 2023, 11, 54. [Google Scholar] [CrossRef]
- Alam, A.; Mohanty, A. Integrated Constructive Robotics in Education (ICRE) Model: A Paradigmatic Framework for Transformative Learning in Educational Ecosystem. Cogent Educ. 2024, 11, 2324487. [Google Scholar] [CrossRef]
- Eguchi, A. Theories and Practices behind Educational Robotics for All. In Research Anthology on Computational Thinking, Programming, and Robotics in the Classroom; IGI Global: Hershey, PA, USA, 2022; pp. 677–715. Available online: https://www.igi-global.com/gateway/chapter/287361 (accessed on 20 April 2025).
- Sapounidis, T.; Alimisis, D. Educational robotics curricula: Current trends and shortcomings. In Educational Robotics International Conference; Springer: Cham, Switzerland, 2021; pp. 127–138. [Google Scholar] [CrossRef]
- Sierra Rativa, A. How can we teach educational robotics to foster 21st learning skills through PBL, Arduino and S4A? In Robotics in Education: Methods and Applications for Teaching and Learning; Springer: Cham, Switzerland, 2019; pp. 149–161. [Google Scholar] [CrossRef]
- Clark, R.E.; Kirschner, P.A.; Sweller, J. Putting students on the path to learning: The case for fully guided instruction. Am. Educ. 2012, 36, 6–11. [Google Scholar]
- Demetroulis, E.A.; Theodoropoulos, A.; Wallace, M.; Poulopoulos, V.; Antoniou, A. Collaboration skills in educational robotics: A methodological approach—Results from two case studies in primary schools. Educ. Sci. 2023, 13, 468. [Google Scholar] [CrossRef]
- Demetroulis, E.A. A Methodology Aimed to Foster Collaboration Skills by using Educational Robotics. In Proceedings of the 2nd International Conference of the ACM Greek SIGCHI Chapter, Athens, Greece, 6–8 September 2023; pp. 1–5. Available online: https://dl.acm.org/doi/10.1145/3609987.3610013 (accessed on 20 April 2025).
- Demetroulis, E.A.; Wallace, M. Educational robotics as a tool for the development of collaboration skills. In Handbook of Research on Using Educational Robotics to Facilitate Student Learning; IGI Global: Hershey, PA, USA, 2021; pp. 140–163. [Google Scholar] [CrossRef]
- Demetroulis, E.A.; Platis, N.; Wallace, M.; Antoniou, A.; Poulopoulos, V. A Visual Depiction of an Educational Robotics Framework Aimed to Foster the Development of Collaboration Skills. Eur. J. Eng. Technol. Res. 2020, 5, 1346–1352. [Google Scholar]
- Jung, S.E.; Won, E.S. Systematic review of research trends in robotics education for young children. Sustainability 2018, 10, 905. [Google Scholar] [CrossRef]
- Alimisis, D. Educational robotics: Open questions and new challenges. Themes Sci. Technol. Educ. 2013, 6, 63–71. [Google Scholar]
- Demetroulis, E.A.; Papadogiannis, I.; Wallace, M.; Poulopoulos, V.; Theodoropoulos, A.; Vasilopoulos, N.; Dasakli, F. Collaboration Skills and Puzzles: Development of a Performance-Based Assessment—Results from 12 Primary Schools in Greece. Educ. Sci. 2024, 14, 1056. [Google Scholar] [CrossRef]
- Graesser, A.C.; Fiore, S.M.; Greiff, S.; Andrews-Todd, J.; Foltz, P.W.; Hesse, F.W. Advancing the science of collaborative problem solving. Psychol. Sci. Public Interest 2018, 19, 59–92. [Google Scholar] [CrossRef] [PubMed]
- Pazos, P.; Magpili, N.; Zhou, Z.; Rodriguez, L.J. Developing critical collaboration skills in engineering students: Results from an empirical study. In Proceedings of the 2016 ASEE Annual Conference & Exposition, New Orleans, LA, USA, 26–29 June 2016; pp. 26–29. [Google Scholar] [CrossRef]
- Sturner, K.K.; Bishop, P.; Lenhart, S.M. Developing collaboration skills in team undergraduate research experiences. PRIMUS 2017, 27, 370–388. [Google Scholar] [CrossRef]
- Murwaningsih, W.I.; Siswono, T.Y.E. Collaborative Problem-Solving Skills of Heterogeneous Groups on Statistics Material Assisted by Microsoft Excel. J. Math. Pedagog. 2025, 6, 26–36. [Google Scholar]
- Rodriguez-Salvador, M.; Castillo-Valdez, P.F. Promoting Collaborative Learning in Students Soon to Graduate through a Teaching–Learning Model. Educ. Sci. 2023, 13, 995. [Google Scholar] [CrossRef]
- Arocena, I.; Huegun-Burgos, A.; Rekalde-Rodriguez, I. Robotics and Education: A Systematic Review. TEM J. 2022, 11, 47–57. [Google Scholar] [CrossRef]
- Ferrarelli, P.; Iocchi, L. Learning Newtonian physics through programming robot experiments. Technol. Knowl. Learn. 2021, 26, 789–824. [Google Scholar] [CrossRef]
- Angeli, C.M.; Jaipal-Jamani, K. Using Scaffolded Programming Scripts in Educational Robotics Activities to Teach Preservice Teachers Computational Thinking. In Proceedings of the AERA Annual Meeting, San Antonio, TX, USA, 27 April–1 May 2017. [Google Scholar]
- Theodoropoulos, A.; Leon, P.; Antoniou, A.; Lepouras, G. Computing in the physical world engages students: Impact on their attitudes and self-efficacy towards computer science through robotic activities. In Proceedings of the 13th Workshop in Primary and Secondary Computing Education, Potsdam, Germany, 4–6 October 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Chen, G.; Shen, J.; Barth-Cohen, L.; Jiang, S.; Huang, X.; Eltoukhy, M. Assessing elementary students’ computational thinking in everyday reasoning and robotics programming. Comput. Educ. 2017, 109, 162–175. [Google Scholar] [CrossRef]
- Atmatzidou, S.; Demetriadis, S. Advancing students’ computational thinking skills through educational robotics: A study on age and gender relevant differences. Robot. Auton. Syst. 2016, 75, 661–670. [Google Scholar] [CrossRef]
- Eguchi, A. Educational robotics for promoting 21st century skills. J. Autom. Mob. Robot. Intell. Syst. 2014, 8, 5–11. [Google Scholar] [CrossRef]
- Tselegkaridis, S.; Sapounidis, T. Exploring the features of educational robotics and STEM research in primary education: A systematic literature review. Educ. Sci. 2022, 12, 305. [Google Scholar] [CrossRef]
- Sáez-López, J.M.; Sevillano-García, M.L.; Vazquez-Cano, E. The effect of programming on primary school students’ mathematical and scientific understanding: Educational use of mBot. Educ. Technol. Res. Dev. 2019, 67, 1405–1425. [Google Scholar] [CrossRef]
- Yang, H.; Zhang, D.; Shang, C. The present situation and path of the integration of robotics and STEM education in China. In Proceedings of the 15th International Technology, Education and Development Conference (INTED2021), Online, 8–9 March 2021; IATED: Valencia, Spain, 2021; pp. 3059–3066. [Google Scholar] [CrossRef]
- Ching, Y.H.; Yang, D.; Wang, S.; Baek, Y.; Swanson, S.; Chittoori, B. Elementary school student development of STEM attitudes and perceived learning in a STEM integrated robotics curriculum. TechTrends 2019, 63, 590–601. [Google Scholar] [CrossRef]
- Fanchamps, N.; Slangen, L.; Hennissen, P.; Specht, M. The influence of SRA-programming on algorithmic thinking and self-efficacy using Lego robotics in two types of instruction. Int. J. Technol. Des. Educ. 2021, 31, 203–222. [Google Scholar] [CrossRef]
- Hsiao, H.S.; Chen, J.C.; Lin, Y.W.; Tsai, H.W. Using a 6E model approach to improve students learning motivation and performance about computational thinking. In Proceedings of the 3rd International Conference on Computational Thinking Education (CTE 2019), Hong Kong, China, 13–15 June 2019; The Education University of Hong Kong: Hong Kong, China, 2019; pp. 122–127. [Google Scholar]
- Master, A.; Cheryan, S.; Moscatelli, A.; Meltzoff, A.N. Programming experience promotes higher STEM motivation among first-grade girls. J. Exp. Child Psychol. 2017, 160, 92–106. [Google Scholar] [CrossRef] [PubMed]
- Jordan, S. Educational Robotics and Computational Thinking in Elementary School Students. Ph.D. Thesis, Abilene Christian University, Abilene, TX, USA, 2023. Available online: https://digitalcommons.acu.edu/etd/725 (accessed on 22 April 2025).
- Diago, P.D.; González-Calero, J.A.; Yáñez, D.F. Exploring the development of mental rotation and computational skills in elementary students through educational robotics. Int. J. Child-Comput. Interact. 2022, 32, 100388. [Google Scholar] [CrossRef]
- Stewart, W.H.; Baek, Y.; Kwid, G.; Taylor, K. Exploring Factors That Influence Computational Thinking Skills in Elementary Students’ Collaborative Robotics. J. Educ. Comput. Res. 2021, 59, 1208–1239. [Google Scholar] [CrossRef]
- Qu, J.R.; Fok, P.K. Cultivating students’ computational thinking through student–robot interactions in robotics education. Int. J. Technol. Des. Educ. 2022, 32, 2743–2765. [Google Scholar] [CrossRef]
- Chiazzese, G.; Arrigo, M.; Chifari, A.; Lonati, V.; Tosto, C. Educational Robotics in Primary School: Measuring the Development of Computational Thinking Skills with the Bebras Tasks. Informatics 2019, 6, 43. [Google Scholar] [CrossRef]
- Afonso, R.; Soares, F.; De Moura Oliveira, P.B. Impact of Educational Robotics on Student Learning and Motivation: A Case Study. In Proceedings of the 2021 IEEE International Conference on Engineering, Technology & Education (TALE), Wuhan, China, 5–8 December 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, Y.; Odic, D.; Tang, X.; Ma, A.; Laricheva, M.; Chen, G.; Wu, S.; Niu, M.; Guo, Y.; Milner-Bolotin, M. Effects of Robotics Education on Young Children’s Cognitive Development: A Pilot Study with Eye-Tracking. J. Sci. Educ. Technol. 2023, 32, 295–308. [Google Scholar] [CrossRef]
- Safrudin, F.M.; Budiyanto, C.W.; Yuana, R.A. The Influence of Educational Robotics to Abstraction Skill in High School. J. Phys. Conf. Ser. 2021, 1808, 012018. [Google Scholar] [CrossRef]
- Socratous, C.; Loannou, A. Using Educational Robotics as Tools for Metacognition: An Empirical Study in Elementary STEM Education. In Proceedings of the International Conference on Mobile Learning, Villa San Giovanni, Italy, 11–13 April 2020; pp. 87–94. [Google Scholar] [CrossRef]
- Di Lieto, M.C.; Pecini, C.; Castro, E.; Inguaggiato, E.; Cecchi, F.; Dario, P.; Cioni, G.; Sgandurra, G. Empowering Executive Functions in 5-and 6-Year-Old Typically Developing Children through Educational Robotics: An RCT Study. Front. Psychol. 2020, 10, 3084. [Google Scholar] [CrossRef] [PubMed]
- Araujo, V.; Mendez, D.; Gonzalez, A. A Novel Approach to Working Memory Training Based on Robotics and AI. Information 2019, 10, 350. [Google Scholar] [CrossRef]
- Zhang, T. Exploring Children’s Mathematics Learning and Self-Regulation in Robotics. Ph.D. Thesis, University of British Columbia, Vancouver, BC, Canada, 2024. [Google Scholar]
- Jones, A.; Castellano, G. Adaptive robotic tutors that support self-regulated learning: A longer-term investigation with primary school children. Int. J. Soc. Robot. 2018, 10, 357–370. [Google Scholar] [CrossRef]
- Martínez-Miranda, J.; Pérez-Espinosa, H.; Espinosa-Curiel, I.; Avila-George, H.; Rodríguez-Jacobo, J. Age-based differences in preferences and affective reactions towards a robot’s personality during interaction. Comput. Hum. Behav. 2018, 84, 245–257. [Google Scholar] [CrossRef]
- Rahman, S.M.M. Assessing and Benchmarking Learning Outcomes of Robotics-Enabled STEM Education. Educ. Sci. 2021, 11, 84. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhu, Y. Effects of educational robotics on the creativity and problem-solving skills of K-12 students: A meta-analysis. Educ. Stud. 2024, 50, 1539–1557. [Google Scholar] [CrossRef]
- Kim, Y.R.; Park, M.S.; Tjoe, H. Discovering Concepts of Geometry through Robotics Coding Activities. Int. J. Educ. Math. Sci. Technol. 2021, 9, 406–425. [Google Scholar] [CrossRef]
- Lupetti, M.L.; Van Mechelen, M. Promoting children’s critical thinking towards robotics through robot deception. In Proceedings of the 2022 17th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Sapporo, Japan, 7–10 March 2022; pp. 588–597. Available online: https://dl.acm.org/doi/10.5555/3523760.3523837 (accessed on 20 April 2025).
- Pribadi, A.P.; Jaladara, V.; Silalahi, C.; Rahman, Y. Application of digital simulation for training purposes through virtual reality in the workplace. Indones. J. Occup. Saf. Health 2023, 12, 457–464. [Google Scholar] [CrossRef]
- Tang, A.L.L.; Tung, V.W.S.; Cheng, T.O. Dual roles of educational robotics in management education: Pedagogical means and learning outcomes. Educ. Inf. Technol. 2020, 25, 1271–1283. [Google Scholar] [CrossRef]
- Latip, A.; Andriani, Y.; Purnamasari, S.; Abdurrahman, D. Integration of educational robotic in STEM learning to promote students’ collaborative skill. J. Phys. Conf. Ser. 2020, 1663, 012052. [Google Scholar] [CrossRef]
- Nanou, A.; Karampatzakis, D. Collaborative educational robotics for the inclusion of children with disabilities. Educ. Innov. Divers. 2022, 1, 30–43. [Google Scholar] [CrossRef]
- So, W.C.; Wong, M.Y.; Cabibihan, J.J.; Lam, C.Y.; Chan, R.Y.; Qian, H.H. Using robot animation to promote gestural skills in children with autism spectrum disorders. J. Comput. Assist. Learn. 2016, 32, 632–646. [Google Scholar] [CrossRef]
- Pop, C.A.; Simut, R.; Pintea, S.; Saldien, J.; Rusu, A.; David, D.; Vanderborght, B. Can the social robot Probo help children with autism to identify situation-based emotions? A series of single case experiments. Int. J. Humanoid Robot. 2013, 10, 1350025. [Google Scholar] [CrossRef]
- Di Battista, S.; Pivetti, M.; Moro, M.; Menegatti, E. Teachers’ Opinions towards Educational Robotics for Special Needs Students: An Exploratory Italian Study. Robotics 2020, 9, 72. [Google Scholar] [CrossRef]
- Kyriazopoulos, I.; Koutromanos, G.; Voudouri, A.; Galani, A. Educational robotics in primary education: A systematic literature review. In Handbook of Research on Using Educational Robotics to Facilitate Student Learning; IGI Global: Hershey, PA, USA, 2021; pp. 377–401. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, X.; Wang, X.; Chen, Z.; Huang, W. Application of Prompt Learning Models in Identifying the Collaborative Problem Solving Skills in an Online Task. Proc. ACM Hum. Comput. Interact. 2024, 8, 1–23. [Google Scholar] [CrossRef]
- Griffin, P.; Care, E. The ATC21S method. In Assessment and Teaching of 21st Century Skills: Methods and Approach; Springer: Dordrecht, The Netherlands, 2014; pp. 3–33. [Google Scholar] [CrossRef]
- Organisation for Economic Co-operation and Development (OECD). PISA: Preparing Our Youth for an Inclusive and Sustainable World: The OECD PISA Global Competence Framework; OECD: Paris, France, 2018; Available online: https://www.gcedclearinghouse.org/resources/preparing-our-youth-inclusive-and-sustainable-world-oecd-pisa-global-competence-framework (accessed on 20 April 2025).
- Hesse, F.; Care, E.; Buder, J.; Sassenberg, K.; Griffin, P. A Framework for Teachable Collaborative Problem Solving Skills. In Assessment and Teaching of 21st Century Skills: Methods and Approach; Griffin, P., Care, E., Eds.; Springer: Dordrecht, The Netherlands, 2015; pp. 37–56. [Google Scholar] [CrossRef]
- Child, S.; Shaw, S. Collaboration in the 21st Century: Implications for Assessment; Cambridge Assessment: Cambridge, UK, 2016. [Google Scholar]
- Shute, V.; Ke, F.; Wang, L. Assessment and adaptation in games. In Instructional Techniques to Facilitate Learning and Motivation of Serious Games; Springer: Cham, Switzerland, 2017; pp. 59–78. [Google Scholar] [CrossRef]
- McSweeney, M.; Katz, B.M. Nonparametric Statistics: Use and Nonuse. Percept. Mot. Ski. 1978, 46, 1023–1032. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Point 1 | Point 2 | Point 3 | Point 4 | Point 5 | |||||
|---|---|---|---|---|---|---|---|---|---|
| 0–10% | 1 | +41% Decline | 1 | 0–10% | 1 | 0–10% | 1 | 0–0.5 pieces/min | 1 |
| 11–20% | 2 | 31–40% Decline | 2 | 11–20% | 2 | 11–20% | 2 | 0.51–1 pieces/min | 2 |
| 21–30% | 3 | 21–30% Decline | 3 | 21–30% | 3 | 21–30% | 3 | 1–1.5 pieces/min | 3 |
| 31–40% | 4 | 11–20% Decline | 4 | 31–40% | 4 | 31–40% | 4 | 1.5–2 pieces/min | 4 |
| 41–50% | 5 | 1–10% Decline | 5 | 41–50% | 5 | 41–50% | 5 | 2–2.5 pieces/min | 5 |
| 51–60% | 6 | 0–10% Improvement | 6 | 51–60% | 6 | 51–60% | 6 | 2.5–3 pieces/min | 6 |
| 61–70% | 7 | 11–20% Improvement | 7 | 61–70% | 7 | 61–70% | 7 | 3–3.5 pieces/min | 7 |
| 71–80% | 8 | 21–30% Improvement | 8 | 71–80% | 8 | 71–80% | 8 | 3.5–4 pieces/min | 8 |
| 81–90% | 9 | 31–40% Improvement | 9 | 81–90% | 9 | 81–90% | 9 | 4–4.5 pieces/min | 9 |
| 91–100% | 10 | 41%+ Improvement | 10 | 91–100% | 10 | 91–100% | 10 | 4.5+ pieces/min | 10 |
| Settings/Instruments | Control | Experimental |
|---|---|---|
| Number of Participants | 16 | 16 |
| Total Number of Groups | 4 | 4 |
| Age | 11–12 | 11–12 |
| Groupings | Groups of 4 | Group of 4 |
| Educational Level | 6th Grade Elementary | 6th Grade Elementary |
| Session Duration | 90 min (2 educational hours) | 90 min (2 educational hours) |
| Number of Sessions | 7 | 7 |
| Prior Knowledge | Scratch Programming | Scratch Programming |
| Educational Robotics Experience | No Experience | No Experience |
| Educational Robotics Kit | Lego WeDo 2 | Lego WeDo 2 |
| Programming | Scratch | Scratch |
| Computer Science during 5th Grade | Yes | Yes |
| Connecting Software App. | S2Bot Native | S2Bot Native |
| Control Group | Experimental Group | |||
|---|---|---|---|---|
| Before | After | Before | After | |
| N | 16 | 16 | 16 | 16 |
| Mean | 85.88 | 85.13 | 88.25 | 96.38 |
| St. Dev. | 6.54 | 7.45 | 6.32 | 4.31 |
| Standard Error | 1.63 | 1.86 | 1.58 | 1.08 |
| Median | 83.00 | 82.00 | 88.00 | 97.00 |
| Minimum | 78.00 | 74.00 | 78.00 | 84.00 |
| Maximum | 96.00 | 96.00 | 98.00 | 100.00 |
| Range | 18.00 | 22.00 | 20.00 | 16.00 |
| Before Intervention | After Intervention | W | z | p-Value |
|---|---|---|---|---|
| Control | Control | 26.000 | 1.1202 | 0.8871 |
| Experimental | Experimental | 0.000 | −3.5162 | <0.001 |
| Study Phase | Mann–Whitney Test Statistic | p-Value |
|---|---|---|
| Before intervention | 102.000 | 0.1713 |
| After intervention | 30.000 | <0.001 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Demetroulis, E.A.; Papadogiannis, I.; Wallace, M.; Poulopoulos, V.; Antoniou, A. CORE: Cultivation of Collaboration Skills via Educational Robotics. Knowledge 2025, 5, 9. https://doi.org/10.3390/knowledge5020009
Demetroulis EA, Papadogiannis I, Wallace M, Poulopoulos V, Antoniou A. CORE: Cultivation of Collaboration Skills via Educational Robotics. Knowledge. 2025; 5(2):9. https://doi.org/10.3390/knowledge5020009
Chicago/Turabian StyleDemetroulis, Emmanouil A., Ilias Papadogiannis, Manolis Wallace, Vassilis Poulopoulos, and Angeliki Antoniou. 2025. "CORE: Cultivation of Collaboration Skills via Educational Robotics" Knowledge 5, no. 2: 9. https://doi.org/10.3390/knowledge5020009
APA StyleDemetroulis, E. A., Papadogiannis, I., Wallace, M., Poulopoulos, V., & Antoniou, A. (2025). CORE: Cultivation of Collaboration Skills via Educational Robotics. Knowledge, 5(2), 9. https://doi.org/10.3390/knowledge5020009