1. Introduction
Generative artificial intelligence (AI) models are important for modeling intelligent machines as physically described in [
1,
2]. Generative AI is based on deep neural networks (DNNs for short), and a common characteristic of DNNs is their compositional nature (cf. [
3]): data is processed sequentially, layer by layer, resulting in a discrete-time dynamical system. The introduction of the transformer architecture for generative AI in 2017 marked the most striking advancement in terms of DNNs (cf. [
4]). Indeed, the transformer is a model architecture eschewing recurrence and instead relying entirely on an attention mechanism to draw global dependencies between input and output. At each step, the model is auto-regressive, consuming the previously generated symbols as additional input when generating the next. The transformer has achieved great success in natural language processing (cf. [
5]).
The transformer has a modularization framework and is constructed by two main building blocks: self-attention and feed-forward neural networks. Self-attention is an attention mechanism relating different positions of a single sequence in order to compute a representation of the sequence. However, despite its meteoric rise within deep learning, we believe there is a gap in our theoretical understanding of what the transformer is and why it works physically (cf. [
6]).
We think that there are two origins for the modularization framework of generative AI models. One is a mathematical origin in which a joint probability distribution can be computed by sequentially conditional probabilities. For instance, the probability of generating a text
given an input
X in a transformer architecture is equal to the joint probability distribution
such that
where the conditional probability
is given by the
ℓ-th attention block in the transformer. Another is a physical origin, in which a physical process is considered to be a sequence of events as a history. As such, generating a text
given an input
X in a physical machine is a process in which, given an input
X at time
an event
occurs at time
an event
occurs at time
…, and last, an event
occurs at time
. A theory of the “histories” approach to physical systems was established by Isham [
2], and the mathematical theory of it associated with joint probability distributions was then developed by Gudder [
1]. Based on their theory, in this paper, we present a mathematical formalism for generative AI and describe the associated physical models.
To the best of our knowledge, physical models for generative AI are usually described by using systems of mean-field interacting particles (cf. [
7,
8] and references therein); i.e., generative AI models are regarded as classical statistical systems. However, since modern chips process data by controlling the flow of electric current, i.e., the dynamics of many electrons, they should be regarded as quantum statistical ensembles and open quantum systems from a physical perspective (cf. [
9,
10]). Consequently, based on our mathematical formalism for generative AI, we construct physical models realizing generative AI systems as open quantum systems. As an illustration, we construct physical models realizing large language models based on a transformer architecture as open quantum systems in the Fock space over the Hilbert space of tokens.
The paper is organized as follows. In
Section 2, we include some notation and definitions on the attention mechanism, the transformer, and the effect algebras. In
Section 3, we give the definition of a generative AI system as a family of sequential joint probabilities associated with input texts and temporal sequences of tokens. This is based on the mathematical theory developed by Gudder (cf. [
1]) for a historical approach to physical evolution processes. Those joint probabilities characterize the attention mechanisms as well as the mathematical structure of the transformer architecture. In
Section 4, we present the construction of physical models realizing generative AI systems as open quantum systems. Our physical models are given by an event-history approach to physical systems; we refer to [
2] for the background of physics for this formulation. In
Section 5, we construct physical models realizing large language models based on a transformer architecture as open quantum systems in the Fock space over the Hilbert space of tokens. Finally, in
Section 6, we give a summary of our innovative points listed item by item and conclude the contributions of the paper.
2. Preliminaries
In this section, we present a mathematical description of the attention mechanism and transformer architecture for generative AI and include some notations and basic properties of
-effect algebras (cf. [
11]). For the sake of convenience, we collect some notations and definitions. Denote by
the natural number set
and for
we use the notation
to represent the set
For
we denote by
the
d-dimensional Euclid space with the usual inner product
For two sets
we denote by
the set of all maps from
X into
For a set
we denote
where
is the set of all sequences
of
n elements in
S; i.e.,
is the set of all finite sequences of elements in
2.1. Deep Neural Networks
A DNN is constructed by connecting multiple neurons. Recall that a (feed-forward) neural network of depth
L consists of some number of neurons arranged in
layers. Layer
is the input layer, where data is presented to the network, while layer
is where the output is read out. All layers in between are referred to as the hidden layers, and each hidden layer has an activation that is a map in the same layer. Specifically, let
be a sequence of sets where
indexes the neurons in layer
and let
be a sequence of vector spaces. A mapping
is called a feed-forward neural network of depth
L if there exists a sequence
of maps
and a sequence
of maps
, which is called the activation function at the layer
such that
for
where
is called the input and
is the output. We call
the architecture of the neural network
Of course,
is determined by its architecture, and there exist different choices of architectures yielding the same
In their most basic form,
is a finite set of
elements and
a feed-forward neural network
is a function of the following form: the input is
for
and
where
is the output. This can be illustrated as follows:
Here, the map
is usually of the form
where
is an
matrix called a weight matrix and
is called a bias vector for each
and the function
represents the activation function at the
ℓ-th layer. The set of all entries of the weight matrices and bias vectors of a neural network
are called the parameters of
These parameters are adjustable and learned during the training process, determining the specific function realized by the network. Also, the depth
the number of neurons in each layer, and the activation functions of a neural network
are called the hyperparameters of
They define the network’s architecture (and training process) and are typically set before training begins. For a fixed architecture, every choice of network parameters as in (
3) defines a specific function
and this function is often referred to as a model.
In a feed-forward neural network, the inputs to neurons in the
ℓ-th layer are usually exclusively neurons from the
-th layer. However, residual neural networks (ResNets for short) allow skip connections; that is, information is allowed to skip layers in the sense that the neurons in layer
ℓ may have
as their input (and not just
). In their most basic form,
and
where
is a vector function,
’s are
matrices, and
’s are vectors in
In contrast to feed-forward neural networks, recurrent neural networks (RNNs for short) allow information to flow backward in the sense that
may serve as input for the neurons in layer
ℓ and not just
We refer to [
12] for more details, such as training for a neural network.
2.2. Attention
The fundamental definition of attention was given by Bahdanau et al. in 2014. To describe the mathematical definition of attention, we denote by the query space, the key space, and the value space. We call an element a query, a key, , and so on.
Definition 1 (cf. [
13])
. Let be a function. Let be a set of keys and a set of values. Given a the attention is defined bywhere is a probability distribution over defined by This means that a value in (6) occurs with probability for For we defineIn particular, when is said to be self-attention at and the mapping defined byis called the self-attention map. We remark that
- (1)
For a finite sequence
of real numbers, define
Then,
as usual in the literature.
- (2)
We have but in general.
- (3)
The function
is called a similarity function, usually given by
where
is a
real matrix called a query matrix and
is a
real matrix called a key matrix. For
the real number
is interpreted as the similarity between the query
q and the key
- (4)
In the representation learning framework of attention, we usually assume the finite set of tokens has been embedded in where d is called the embedding dimension, so we identify each with one of finitely-many vectors x in We assume that the structure (positional information, adjacency information, etc) is encoded in these vectors. In the case of self-attention, we assume
Since the self-attention mechanism can be composed to arbitrary depth, making it a crucial building block of the transformer architecture, we mainly focus on it in what follows. In practice, we need multi-headed attention (cf. [
4]), that process independent copies of the data
X and combine them with concatenation and matrix multiplication. Let
be the input set of tokens embedded in
Let us consider
-headed attention with the dimension
for every head. For every
let
be
(query, key, value) matrices associated with the
i-th self-attention, and the similarity function
Let
denote the output projection matrix, where
is a
matrix for every
For
the multi-headed self-attention (MHSelfAtt for short) is then defined by
that is, an output
occurs with the probability
As such,
yields a basic building block of the transformer
as in the case of one-headed attention.
2.3. Transformer
In line with successful models, such as large language models, we focus on the decoder-only setting of the transformer, where the model iteratively predicts the next tokens based on a given sequence of tokens. This procedure is called autoregressive since the prediction of new tokens is only based on previous tokens. Such conditional sequence generation using autoregressive transformers is referred to as the transformer architecture.
Specifically, in the transformer architecture defined by a composition of blocks, each block consists of a self-attention layer
a multi-layer perception
and a prediction head layer
First, the self-attention layer SelfAtt is the only layer that combines different tokens. Let us denote the input text to the layer by
embedded in
and focus on the
n-th output. For each
letting
where
and
are two
matrices (i.e., the query and key matrices), we can interpret
as similarities between the
n-th token
(i.e., the query) and the other tokens (i.e., keys); for satisfying the autoregressive structure, we only consider
The softmax layer is given by
which can be interpreted as the probability for the
n-th query to “attend” to the
j-th key. Then, the self-attention layer
can be defined as
where
is the
real matrix such that
for any
the output
occurring with the probability
is often referred to as the values of the token
Thus,
is a random map such that
for each
If the attention is a multi-headed attention with
heads of the dimension
where for
are the
(query, key, value) matrices and
is the
(output) matrix of the
i-th self-attention, then the multi-headed self-attention layer
is defined by
where
i.e., an output
occurs with the probability
for each
In what follows, we only consider the case of one-headed attention, since the multi-headed case is similar.
Second, the multi-layer perception is a feed-forward neural network
such that
with the probability
(
) for each
Finally, the prediction head layer can be represented as a mapping
which maps the sequence of
to a probability distribution
where
is the probability of predicting
as the next token. Since
contains information about the whole input text, we may define
such that the next token
with the probability
for
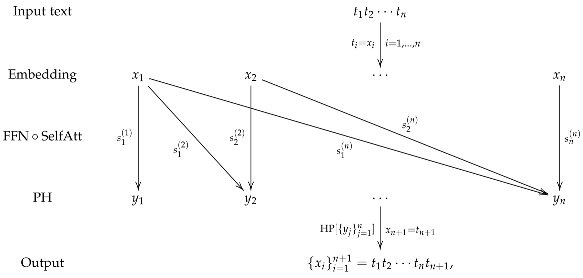
Hence, a basic building block for the transformer, consisting of a self-attention module (SelfAtt) and a feed-forward network (FFN) followed by a prediction head layer (PH), can be illustrated as follows:
where the input text
is embedded as a sequence
in
occurs with the probability
for each
is generated with the probability
for each
and so the output is
One can then apply the same operations to the extended sequence
in the next block, obtaining
to iteratively compute further tokens (there is usually a stopping criterion based on a special token or the mapping
). Below, without loss of generality, we omit the prediction head layer
Typically, a transformer of depth
L is defined by a composition of
L blocks, denoted by
consisting of
L self-attention maps
and
L feed-forward neural networks
that is,
where the indices of the layers SelfAtt and FFN in (
24) indicate the use of different trainable parameters in each of the blocks. This can be illustrated as follows:
that is,
Also, we can consider the transformer of the form
where
denotes the identity mapping in
commonly known as a skip or residual connection.
2.4. Effect Algebras
For the sake of convenience, we collect some notations and basic properties of
-effect algebras (cf. [
1,
11,
14] and references therein). Recall that an effect algebra is an algebraic system
where
is a non-empty set,
, which are called zeroes and unit elements of this algebra, respectively, and ⊕ is a partial binary operation on
that satisfies the following conditions for any
:
- (E1)
(Commutative Law): If is defined, then is defined and which is called the orthogonal sum of a and
- (E2)
(Associative Law): If
and
are defined, then
and
are defined and
which is denoted by
- (E3)
(Orthosupplementation Law): there exists a unique such that is defined and such is unique and called the orthosupplement of
- (E4)
(Zero–One Law): if is defined, then
We simply call
an effect algebra in the sequel. From the associative law (E2), we can write
if this orthogonal sum is defined. For any
we define
if there exists a
such that
this
c is unique and denoted by
so
We also define
if
is defined; i.e.,
a is orthogonal to
It can be shown (cf. [
14]) that
is a bounded partially ordered set (poset for short) and
if and only if
For a sequence
in
if
is defined for all
such that
exists, then the sum
of
exists and define
We say that
is a
-effect algebra if
exists for any sequence
in
satisfying that
is defined for all
It was shown in (Lemma 3.1, [
1]) that
is a
-effect algebra if and only if the least upper bound
exists for any monotone sequence
i.e.,
Let
and
be
-effect algebras. A map
is said to be additive if for
implies that
and
An additive map
is
-additive if for any sequence
such that
exists,
exists and
A
-additive map
is said to be a
-morphism if
and moreover,
is called a
-isomorphism if
is a bijective
-morphism and
is a
-morphism. It can be shown (cf. [
1]) that
- (1)
A map is additive if and only if is monotone in the sense that implies
- (2)
An additive map is -additive if and only if implies
- (3)
A -morphism satisfies
The unit interval is a -effect algebra defined as follows: For any is defined if and in this case Then, we have that and are the zero and unit elements, respectively. In what follows, we always regard as a -effect algebra in this way. Let be a -effect algebra, a -morphism is called a state on and we denote by the set of all states on A subset S of is said to be order determining if for all implies
Another example of a -effect algebra is a measurable space defined as follows: For any is defined if and in this case, We then have and We always regard a measurable space as a -effect algebra in this way. Let be a -effect algebra, a -morphism is called an observable on with values in (a -valued observable for short). The elements of a -effect algebra are called effects, and so an observable X maps effects in into effects in ; i.e., is an effect in for We denote by the set of all -valued observables. Note that is equal to the set of all probability measures on For and we have which is called the probability distribution of X in the state
3. Mathematical Formalism
In this section, we introduce a mathematical formalism for generative AI. We utilize the theory of -effect algebras to give a mathematical definition for a generative AI system. Let be a -effect algebra and a measurable space. An orthogonal decomposition in is a sequence in such that exists, and moreover, it is complete if We denote by the set of all completely orthogonal decomposition in A completely orthogonal decomposition in is called a countable partition of i.e., a sequence of elements in such that for and We denote by the set of all countable partitions of For an ordered n-tuple of effects in is called a n-time chain-of-effect, and we interpret as an inference process of an intelligence machine in which the effect occurs at time for where Alternatively, no specific times may be involved and we regard as a sequential effect in which occurs first, occurs second, …, and occurs last.
Definition 2. With the above notations, a generative artificial intelligence system is defined to be a triple where is a σ-effect algebra, is a measurable space, such that
- (G1)
The input set of is equal to the set ; i.e., an input is interpreted by a state
- (G2)
The output set of is equal to the set ; i.e., the set of all finite sequences of elements in
- (G3)
An inference process in is interpreted by a chain-of-effect for
Remark 1. We refer to [15] for a mathematical definition of general artificial intelligence systems in terms of topos theory, including quantum artificial intelligence systems. In practice, we are not concerned with a generative AI system itself but deal with models for such as large language models. To this end, we need to introduce the definition of a model for in terms of joint probability distributions for observables associated with
For and we may view the effect as the event for which X has a value in For a partition we may view as a set of possible alternative events that can occur. One interpretation is that represents a building block of an artificial intelligence architecture for processing X and the alternatives result from the dial readings of the block. Given an ordered n-tuple of events is called an n-time chain-of-event, and we interpret as an inference process of an intelligence machine in which has a value in first, has in s, …, and has in last, so that the output result is We denote the set of all n-time chain-of-events by and the set of all chain-of-events by
A
n-step inference set has the form
where
We interpret
as ordered successive processes of observables
with partitions
for
We denote the collection of all
n-step inference sets by
and the collection of all inference sets by
If
and
such that
for every
we say the chain-of-event
is an element of the inference set
and write
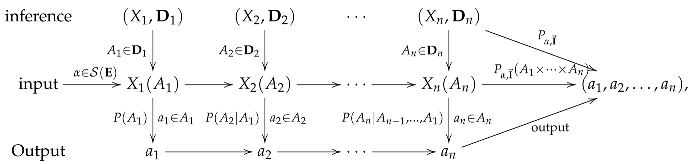
This can be illustrated as follows:
which means that the machine firstly obtains
as part of an output with the probability
then obtains
with the conditional probability
…, and lastly obtains
with the conditional probability
and finally combines them to obtain the output result
with the probability
where
will be explained later.
If
and
are two inference sets, then we define their sequential product by
and obtain a
-step inference set. Mathematically, we can include the empty inference set
∅ that satisfies
such that
becomes a semigroup under this product.
For a partition
we denote by
the
-subalgebra of
generated by
and for
n partitions
we denote by
the
-algebra on
generated by
i.e.,
We denote by
the set of all probability measures on
Also, we write
for
Given an input
for an inference set
, we denote by
the probability measure such that for
is the probability within the inference set
that the event
occurs first,
occurs second, …,
occurs last. We call
the joint probability distribution of an inference set
under the input
For interpreting a model for a generative AI system, ’s need to satisfy physically motivated axioms as follows.
Definition 3. With the above notations, a model for is defined to be a family of joint probability distributions of inference setsthat satisfies the following axioms: - (P1)
For and if for all then
- (P2)
For if and thenfor every - (P3)
For with if then - (P4)
If and for thenfor every
For the physical meanings of the model structure axioms, we remark that
- (1)
The axiom means that the input set can distinguish different events;
- (2)
The axiom means that the partition of the last processing is irrelevant;
- (3)
The axiom means that the last processing does not affect the previous ones;
- (4)
The axiom means that the probability of a chain of events does not depend on the partitions and hence is unambiguous. However, for in in general if ’s are quantum observables due to quantum interference.
If
and
are two inference sets,
and if
is an input such that
then we define the conditional probability of
B given
A within
under the input
as follows:
Since
is a probability measure on
where
for
and
for
so
is a probability measure on
which is called a conditional sequential joint probability distribution.
Proposition 1. Given and if then the conditional sequential joint probability distribution satisfies the axioms (P2)–(P4) in Definition 3.
Proof. By the axiom (P2), we have
hence,
satisfies the axiom (P2), and so does the axiom (P3). Similarly, the axiom (P4) implies that
satisfies the axiom (P4); we omit the details. □
We remark that when observables are quantum ones, Bayes’ formula need not hold, i.e.,
in general. This is because the left-hand side is
and the right-hand side is
so the order of the occurrences is changed. For instance, consider a qubit with the standard basis
and
Let
If
and
; then
and so,
We refer to
Section 4 for more details.
4. Physical Models for Generative AI
Physical models for generative AI are usually described by using systems of mean-field interacting particles, such as large language models based on attention mechanisms (cf. [
7,
8] and references therein); i.e., generative AI systems are regarded as classical statistical ensembles. However, since modern chips process data through controlling the flow of electric current, i.e., the dynamics of largely many electrons, they should be regarded as quantum statistical ensembles from a physical perspective (cf. [
10]). Consequently, we need to model modern intelligence machines involving open quantum systems. To this end, combining the history theory of quantum systems (cf. [
2]) and the theory of effect algebras (cf. [
1,
14]), we construct physical models realizing generative AI systems as open quantum systems.
Let
be a separable complex Hilbert space with the inner product
being conjugate-linear at the first variable and linear at the second variable. We denote by
the set of all bounded linear operators on
by
the set of all bounded self-adjoint operators, and by
the set of all orthogonal projection operators. We denote by
I the identity operator on
Unless stated otherwise, an operator means a bounded linear operator in the sequel. An operator
T is positive if
for all
and in this case we write
We define
for a positive operator
where
is an orthogonal basis of
It is known that
is independent of the choice of the basis, and it is called the trace of
T if
A positive operator
is a density operator if
and the set of all density operators on
is denoted by
Each positive operator is self-adjoint, and if two self-adjoint operators
such that
we write
or
We refer to [
16,
17,
18] for more details on the theory of operators on Hilbert spaces.
A self-adjoint operator
E that satisfies
is called an effect, and the set of all effects on
is denoted by
For
we define
if
and in this case we write
It can be shown (cf. (Lemma 5.1, [
1])) that
is a
-effect algebra, and each state
on
has the form
for every
where
is a unique density operator on
and vice versa. Thus, we identify
Let
be a measurable space. An observable
is a positive operator valued (POV for short) measure on
; i.e.,
- (1)
is an effect on for any
- (2)
and
- (3)
For an orthogonal decomposition
in
where the series on the right-hand side is convergent in the strong operator topology on
i.e.,
for every
To understand the inference process, let us show the conventional interpretation of joint probability distributions in an open quantum system that is subject to measurements by an external observer. To this end, let
denote the time-evolution operator from time
s to
where
’s are usually called Kraus operators, such that
That is,
are quantum operations (cf. [
19]) such that for every state
in the Schrödinger picture, while for each observable
in the Heisenberg picture. We refer to [
9] for the details on the theory of open quantum systems.
Then the density operator state
at time
evolves in time
to the state
where
Suppose that a measurement
is made at time
where
and
Then the probability that an event
with
occurs is
If the result of this measurement is kept, then, according to the von Neumann–Lüders reduction postulate, the appropriate density operator to use for any further calculation is
Next, suppose a measurement
is performed at time
Then, according to the above, the conditional probability of an event
for
occurs at time
given that the event
occurs at time
(and that the original state was
) is
where
and the appropriate density operator to use for any further calculation is
The joint probability of
occurring at
and
occurring at
is then
Generalizing to a sequence of measurements
at times
where
and
for
the sequential joint probability of associated events
with
occurring at
for
is
where
for
and
for
Therefore, given an inference set
for an input
the sequential joint probability within the inference set
that the event
occurs at
occurs at
…,
occurs at
where
for
and
is given by
where
and
for
in the Schrödinger picture operator defined with respect to the fiducial time
Proposition 2. Let be a separable complex Hilbert space, and let be a measurable space. A physical model associated with defined bywhere s’ are given by (49), satisfies the axioms in Definition 3. Proof. For
and
by (
49) we have
If
for all
then
i.e., the axiom (P1) holds.
For
if
for
and
by (
49), we have
where
for
and
for
Also, for
and
by (
49) we have
Hence, we have
for
Since
is generated by
’s, this concludes the axiom (P2). Similarly, we can check the axioms (P3) and (P4) and omit the details. □
Remark 2. Note that the probability family ’s are determined by the time-evolution operators ’s. Therefore, a family of the discrete-time evolution operators defines a physical model realizing a generative AI system, based on the mathematical formalism in Definition 3 for models of generative AI systems.
5. Large Language Models
In this section, we describe physical models for large language models based on a transformer architecture in the Fock space over the Hilbert space of tokens. Consider a large language model with the set of N tokens. A finite sequence of tokens is called a text for simply denoted by or where n is called the length of the text
Let
be the Hilbert space with
being an orthogonal basis, and we identify
for
Let
be the Fock space over
that is,
where
is the
n-fold tensor product of
We refer to [
16] for the details of Fock spaces. In what follows, for the sake of convenience, we involve the finite Fock space
for a large integer
Note that an operator
for
satisfies that for all
and in particular, if
for
then
Given
and a sequence
for
the operator
is defined by
for every
In particular, if
then
where
denotes the zero operator in
for
Since large language models are based on a transformer architecture, we suffice to construct a physical model in the Fock space
(
) for a transformer
(
24) with a composition of
L blocks, consisting of
L self-attention maps
and
L feed-forward neural networks
Precisely, let us denote the input text to the layer by
As noted above,
where
and
Then, a physical model for
consists of an input
and a sequence of quantum operations
in the Fock space
defined above, where
We show how to construct this model step by step as follows.
To this end, we denote by
and write
At first, the input state
is given as
Then there is a physical operation
in
(see Proposition 3 below), depending only on the attention mechanism
and
such that
where
and
Define
by
and for every
Making a measurement
at time
we obtain an output
with probability
, and the appropriate density operator to use for any further calculation is
for every
where
and
Next, there is a physical operation
in
(see Proposition 3 again), depending only on the attention mechanism
and
at time
such that
for
where
(with
) and
Define
by
and for every
Making a measurement
at time
we obtain an output
with probability
, and the appropriate density operator to use for any further calculation is
for each
where
and
Step by step, we can obtain a physical model
with the input state
such that a text
is generated with the probability
within the inference
Thus, we can obtain a physical model for if we prove that ’s exist.
Proposition 3. With the above notations, there exists a physical model in () for a transformer (24) such that given an input text a text is generated with the probabilitywithin the inference Proof. We regard
and
as elements in
in a natural way, i.e.,
for
We need to construct
to satisfy (
60). We first define
where
is a certain token. Secondly, define
and in general, for
define
for any
and
Let
Then
extends uniquely to a positive map
from
into
that is,
where
are any complex numbers for
Since
is a commutative
-algebra, by Stinespring’s theorem (cf. (Theorem 3.11, [
20])), it follows that
is completely positive. Hence, by Arveson’s extension theorem (cf. (Theorem 7.5, [
20])),
extends to a completely positive operator
in
(note that
is not necessarily unique), i.e., a quantum operation in
By the construction,
satisfies (
60). Also, by Kraus’s theorem (cf. [
19]), we conclude that
has the Kraus decomposition (
39).
In the same way, we can prove that
exists and satisfies (
65). Step by step, we can thus obtain a physical model
as required. □
Remark 3. A physical model for the transformer with a multi-headed attention (21) can be constructed in a similar way. Also, we can construct physical models for the transformer of the form (26), even for the transformer of a more complex structure (cf. [21] and reference therein). We omit the details. Physical models satisfying the above joint probability distributions associated with a transformer
are not necessarily unique. However, a physical model
uniquely determines the joint probability distributions; that is, it defines a unique physical process for operating the large language model based on
Therefore, in a physical model
for
training for
corresponds to training for the Kraus operators
which are adjustable and learned during the training process, determining the physical model, as corresponding to the parameters
and
in
From a physical perspective, to train for a large language model is just to determine the Kraus operators
associated with the corresponding physical system (cf. [
22]).
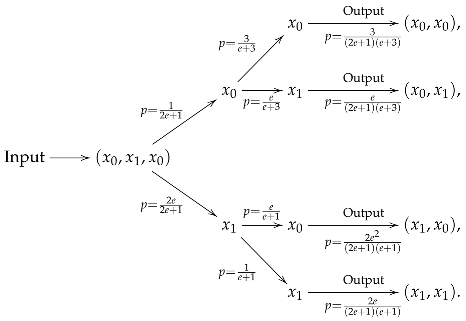
Example 1. Let be the set of two tokens embedded in such that and Then, with the standard basis and LetSuppose that in , and let i.e., and Below, we construct a quantum operation associated with and in To this end, define andWe regard () as elements in in a natural way. LetThen is a subspace of and Φ extends uniquely to a positive map from into i.e.,for any As shown in Proposition 3, can extend to a completely positive operator in which is a quantum operation in associated with and in Note that is not necessarily unique. Example 2. As in Example 1, is the set of two tokens embedded in such that and Then with the standard basis and Let Assume an input text The input state is then given by If and in an associated physical operation at time satisfiesBy measurement, we obtain with probability and obtain with probability while If and in an associated quantum operation at time satisfiesandBy measurement at time when occurs at we obtain with probability and obtain with probability when occurs at we obtain with probability and obtain with probability Therefore, we obtain the joint probability distributions:This can be illustrated as follows: