
A Hybrid Anti-Collision Protocol Based on Frequency Division Multiple Access (FDMA) and Time Division Multiple Access (TDMA) for Radio Frequency Identification (RFID) Readers

Abstract
1. Introduction
- -
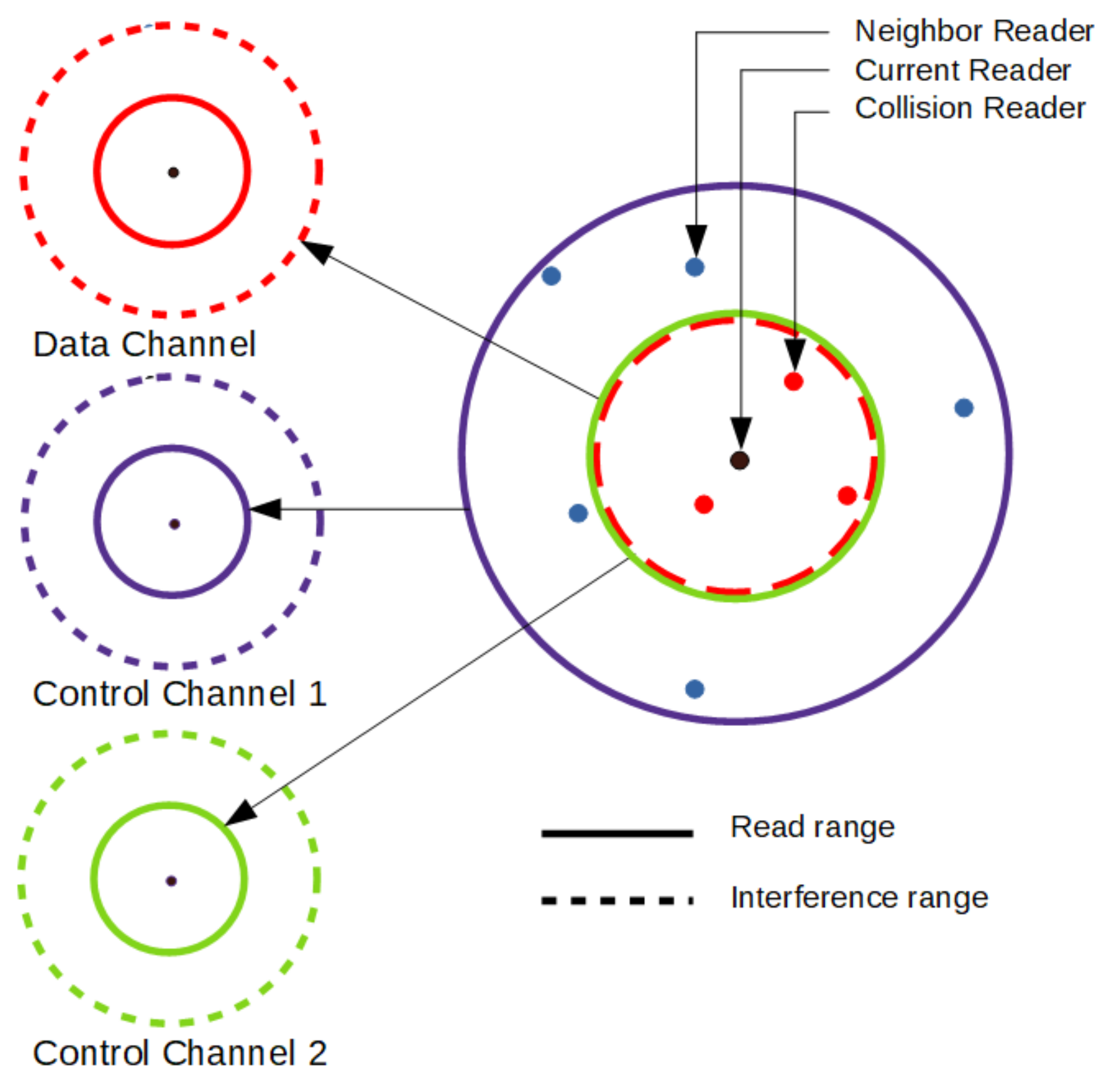
- Reader-to-Reader Interference (RRI) [Figure 1a]: In dense multi-channel RFID networks, RRI occurs when one RFID reader’s transmission overlaps with the transmission range (Discontinuous circle in Figure 1) of another nearby reader operating on a different channel. This interference disrupts the communication between the readers and the tags within their respective interrogation zones. Unlike in single-channel networks, where RRI primarily occurs due to overlapping transmission ranges, in dense multi-channel networks, RRI can also arise from interference caused by readers operating on adjacent or overlapping frequency bands. This can lead to collisions between reader signals, resulting in decreased read accuracy, increased latency, and reduced overall system performance.
- -
- Reader-to-Tag Interference (RTI) [Figure 1b]: RTI in dense multi-channel RFID networks occurs when multiple readers simultaneously attempt to interrogate the same set of tags, leading to interference at the tag level. This interference arises when tags within the reading range. (Continuous circle in Figure 1) of multiple readers receive conflicting signals, making it challenging for them to respond accurately to the interrogation commands. In dense multi-channel networks, RTI may be exacerbated by the presence of multiple readers operating on different channels, increasing the likelihood of tag collisions and communication errors. Consequently, RTI can lead to decreased tag read rates, increased collision probability, and reduced system efficiency.

1.1. Addressing RRI and RTI Collisions
1.2. Maximizing Active Readers
1.3. Minimizing Reader Collisions and Reading Delay
2. Related Work
2.1. Distributed Algorithms
2.2. Centralized Algorithms
2.3. Protocol Comparisons
3. Algorithm Description
3.1. Background
- A.
- Control Channel
- Control Channel 1 (CC1): Dedicated to distributing frequencies for reuse.
- Control Channel 2 (CC2): Utilized for managing TS, enabling effective avoidance of RTI collisions.
- B.
- Frame Structures and Tables
- TYPE: Message type (e.g., REQUEST1, REQUEST2, RESPONSE1, RESPONSE2, TS_select).
- READER_SENDER: Identification of the source reader.
- READER_RECEIVER: Identification of the destination reader.
- ELIMINATE_TS: TS used by the source reader.
- TS_Enable: Authorized Time Slots for use.
- TS_Disable: Time Slots not allowed for use.
- USED_PROTOCOL: Protocol used, either FTDMA or CSMA.
- READER_IN_CHAIN: Readers using the same data channel.
- AFFECT_FREQ: Affected frequency.
- TYPE: Message type (e.g., REQUEST1, REQUEST2, RESPONSE, ADD_TO_CHAIN, NEW_CHAIN).
- READER_SENDER: Sender reader ID.
- READER_RECEIVER: Receiver reader ID.
- READER_IN_CHAIN: Readers using the same data channel.
- AFFECT_FREQ: Assigned frequency.
3.2. Algorithm
- A.
- Time Slot Control Process
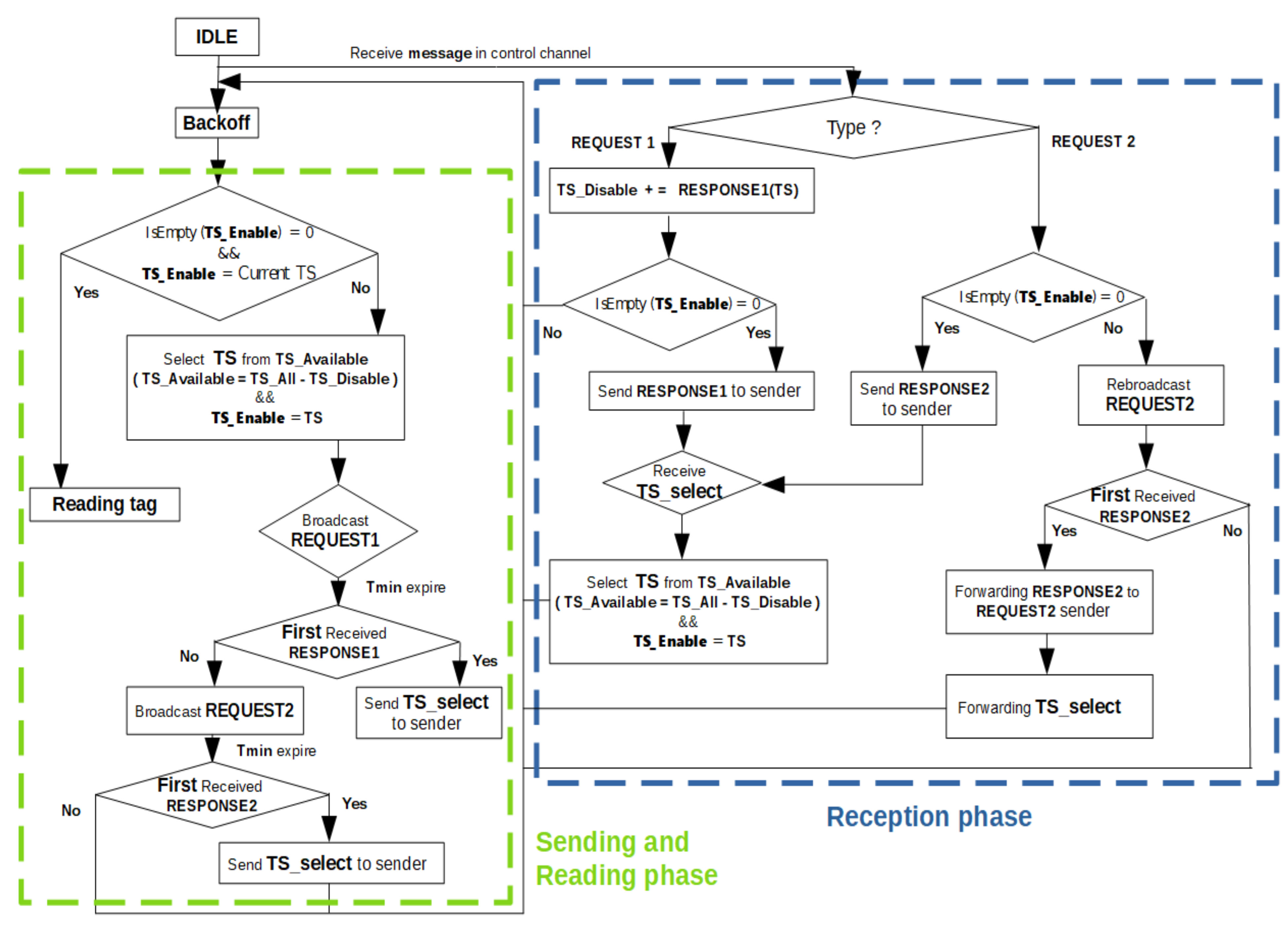
- Initially, all readers are in the Backoff state [24]. When a reader initiates the process, it begins the notification procedure with its neighboring readers.
- During this phase, the reader enters the receive phase (green zone) upon receiving a control message from another reader. If no control message is received, it proceeds with the send and read phase (blue zone).
- A.1
- Sending and Reading phase
- The reader initiates tag interrogation using the data channel if there is an available TS in its table (IsEmpty(TSEnable) = 0). Otherwise, it selects an available TS from the list and stores it in TSEnable.
- Subsequently, the reader broadcasts a REQUEST1 message through the control channel to identify the nearest neighbor potentially affected by RTI. This serves as an alert to neighbors to avoid using the reader’s TS.
- After a delay period of Tmin, if the reader receives a RESPONSE1 message from the targeted neighbors, it retains the first received message. The reader then activates the sender of the RESPONSE1 message through a TS_select message, enabling them to select their TS and initiate the subsequent discovery process.
- If no response is received within Tmin, the reader broadcasts a new REQUEST2 message to discover other readers, utilizing existing neighbors as relays.
- In the case of receiving a RESPONSE1 message, the reader retains the first message and sends a TS_select message to the new neighbor, initiating the next phase of the process.
- A.2
- Reception phase
- If the reader receives a REQUEST1 message, it updates its table entry by adding the TS value from the ELIMINATE_TS field of the corresponding RESPONSE1(TS) frame to the TS_Disable column. This is achieved by the equation TSDisable = TSDisable + RESPONSE1(TS).
- Subsequently, if there are available Time Slots (IsEmpty(TSEnable) = 0) in its table, the reader sends a RESPONSE1 message. It selects one of the available TSs and stores it in the TS_Enable field (TSEnable = TS). If there are no available TSs, the reader does not participate in the process.
- If the reader already has a TS and is unaffected (IsEmpty(TSEnable) = 0), it acts as a forwarding node. The reader rebroadcasts the REQUEST2 frame to its neighboring readers.
- Upon receiving a RESPONSE2 message, the reader forwards it to the sender of the original REQUEST2 message and waits for a response containing the TS value to be forwarded.
- However, if the reader is affected because it does not have a TS (IsEmpty(TSEnable) = 1), it sends a RESPONSE2 message and waits for a TS_select response. This response provides the necessary TS for the reader to participate in the process.
- B.
- Frequency Control Process
- B.1
- Sending and Reading phase
- B.2
- Reception phase
4. Simulation and Results
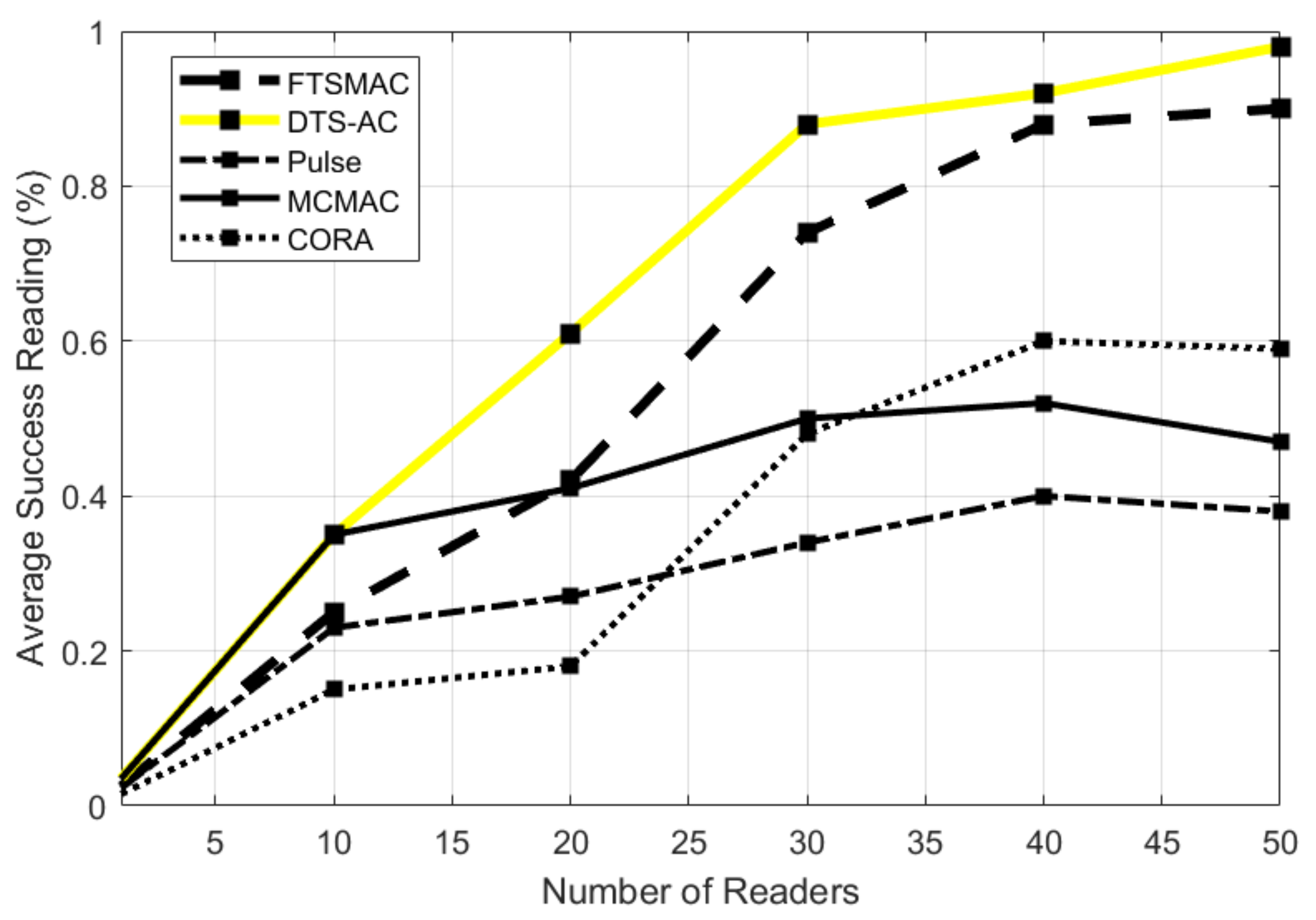
- Pulse: Utilizes a control channel for notifications between readers and a single data channel for tag interrogation.
- MCMAC: Allows RFID readers to manage multiple data channels, announcing occupied frequencies via a control channel for more efficient resource utilization.
- CORA: Designed for mobile, dense deployments in RFID networks; CORA relies on local learning within each reader’s neighborhood to activate and identify colliding neighbors.
- FTSMAC: Utilizes a distributed RFID anti-collision protocol with a notification system for distributing frequency resources, enabling readers to query tags simultaneously in assigned time slots within the same data channel group.
- NFRA: Based TDMA protocol for dense RFID networks, coordinating reader communications via a polling server and ensuring collision-free operation through centrally deployed query servers.
4.1. Interference Modeling
- A.
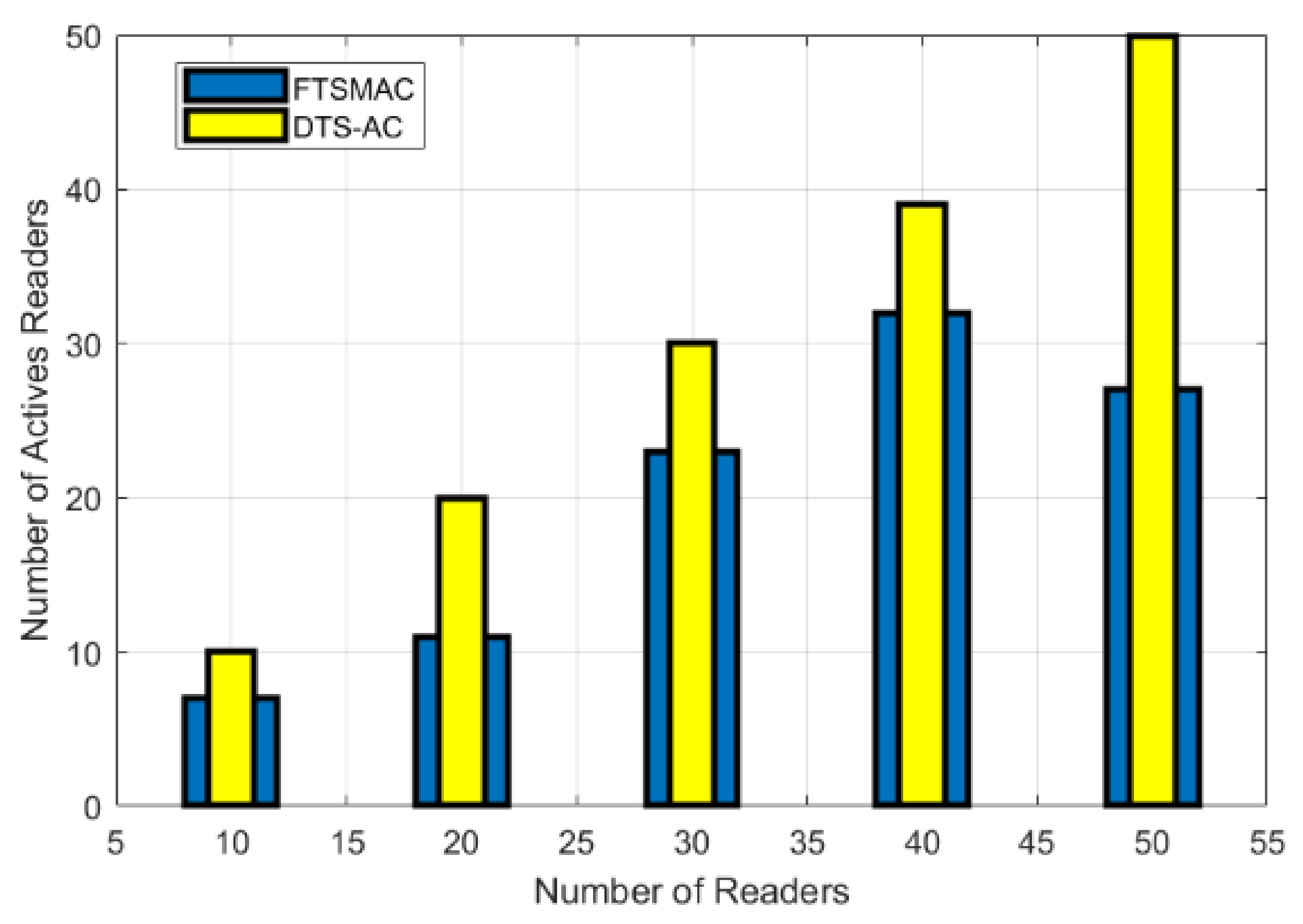
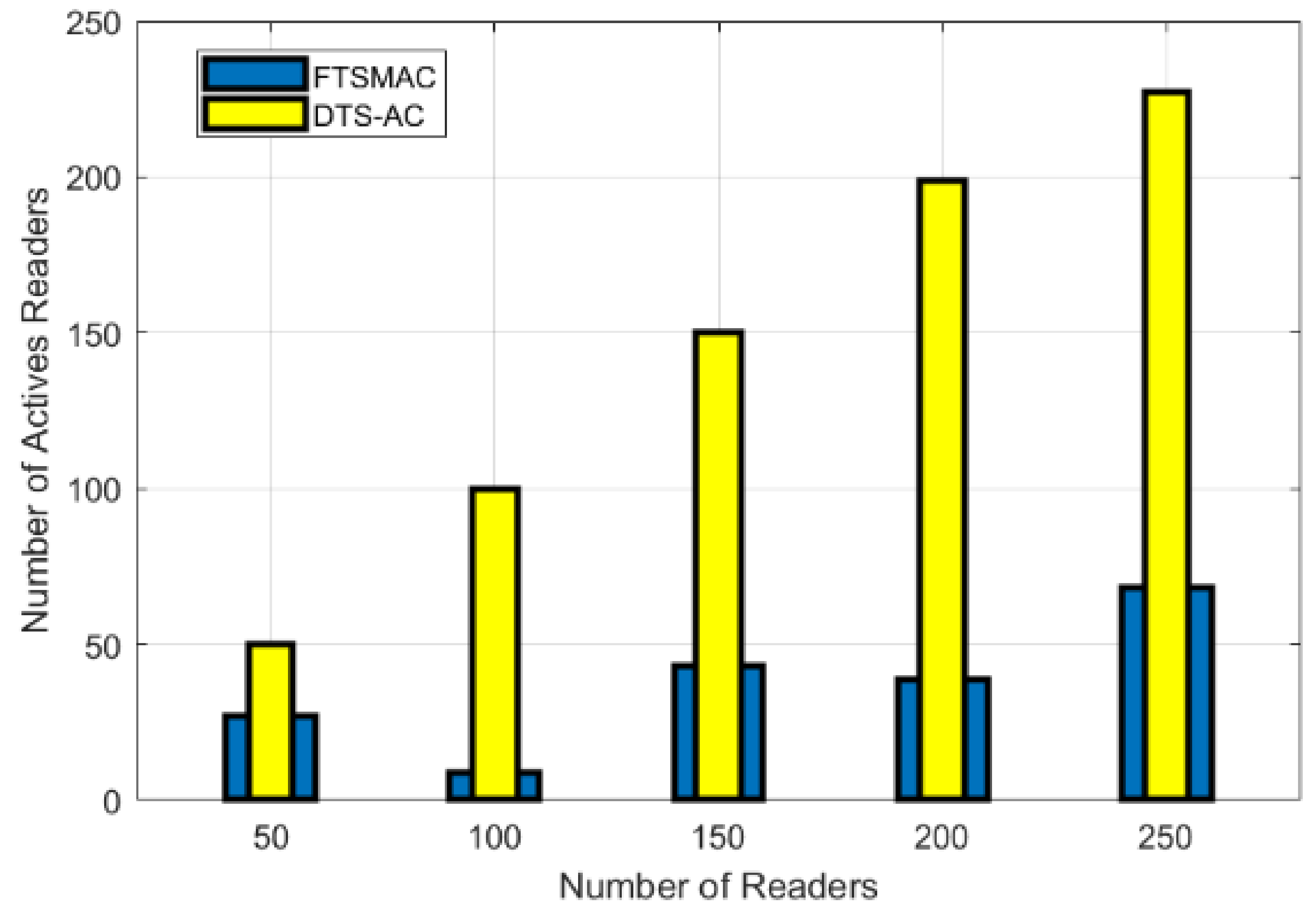
- Number of Active Readers:
- B.
- Number of Collisions:
4.2. Analysis of Results
4.3. Complexity Analysis
- R: Number of readers;
- T: Number of tags;
- F: Number of frequency;
- S: Number of time slots;
- D: Range of data channel;
- C: Range of control channel.
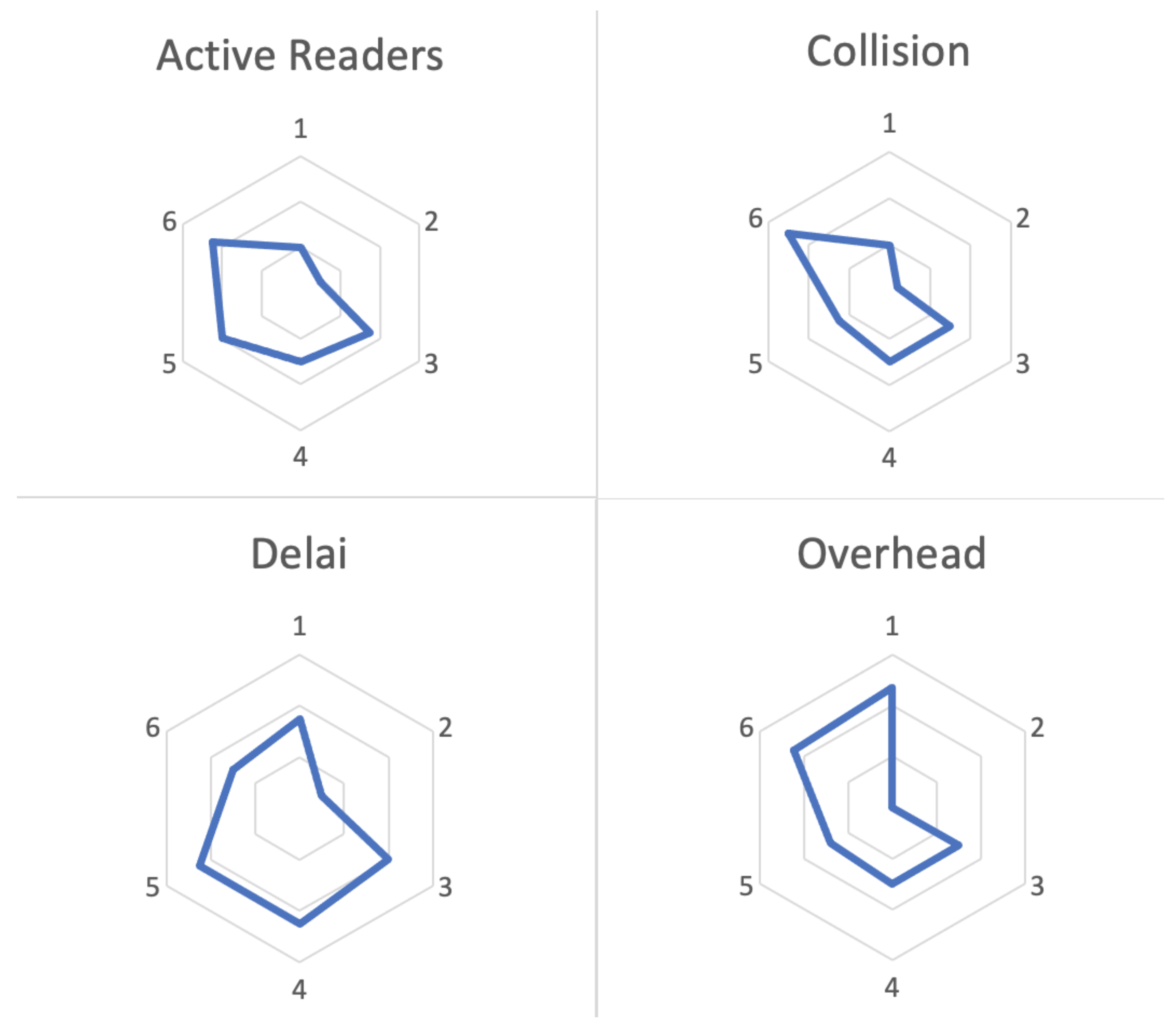
- Active Reader (A)
- 2.
- Collision (Cn)
- 3.
- Delay (Dl)
- 4.
- Overhead (O)
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
| Algorithm (FDMA part): |
| ------------ Sending Phase ------------ |
| IDLE Backoff If table.USED_PROTOCOL == CSMA Wait(Tmin) If receive Beacon when Wait(Tmin) If maxFreq − occupedFreq > 1 Select fx from {Max freq − freq in table} Insert FDMA, fx, Rx in table Broadcast REQUEST1 in CC Wait(T) If receive RESPONSE then Send ADD_TO_CHAINE in CC IDLE T expire If maxFreq − freq in table < 1 then IDLE Elseif maxFreq − freq in table > 1 Select fx from {Max freq − freq in table} Wait( T) If receive RESPONSE then Send NEW_CHAINE in CC T expire then IDLE Elseif maxFreq − occupedFreq < 1 Broadcast Beacon Reading Tag End else if table.USED_PROTOCOL == FDMA Freq = table.AFFECT_FREQ Reading Tag end |
| ------------ Receive Phase ------------ |
| If receive REQUEST1 If Power < Threshold If REQUEST1. READER_IN_CHAIN exists in table then IDLE Else Insert FDMA, List Rx in table Send RESPONSE in CC If receive ADD_TO_CHAINE then Insert Fx in table Broadcast REQUEST1 in CC ------------ Sending Phase Else IDLE Else Insert List Rx in table End Else if receive REQUEST2 Send RESPONSE in CC If receive NEW_CHAINE then Insert Fx, Rx, FDMA in table Broadcast REQUEST1 in CC ------------ Sending Phase end end |
References
- Zannas, K.; Chietera, F.P.; Abdelnour, A.; Kaddour, D.; Colella, R.; Catarinucci, L.; Duroc, Y.; Tedjini, S. Designing UHF RFID tag antennas with Barcode shape for dual-technology identification. IET Microw. Antennas Propag. 2022, 16, 733–742. [Google Scholar] [CrossRef]
- Rafiquea, M.Z.; Haidera, M.; Raheema, A.; Ab Rahmanb, M.N.; Amjada, M.S. Essential Elements for Radio Frequency Identification (RFID) adoption for Industry 4.0 Smart Manufacturing in Context of Technology-Organization-Environment (TOE) Framework—A Review. J. Kejuruter. 2022, 34, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Xu, S.; Chen, J.; Wu, M.; Zhao, C. E-commerce supply chain process optimization based on whole-process sharing of internet of things identification technology. Comput. Model. Eng. Sci. 2021, 126, 843–854. [Google Scholar] [CrossRef]
- Profetto, L.; Gherardelli, M.; Iadanza, E. Radio Frequency Identification (RFID) in health care: Where are we? A scoping review. Health Technol. 2022, 12, 879–891. [Google Scholar] [CrossRef] [PubMed]
- van Geest, M.; Tekinerdogan, B.; Catal, C. Smart warehouses: Rationale, challenges and solution directions. Appl. Sci. 2021, 12, 219. [Google Scholar] [CrossRef]
- Mo, L.; Zhu, Y.; Zhang, D. Uhf RFID indoor localization algorithm based on BP-SVR. IEEE J. Radio Freq. Identif. 2022, 6, 385–393. [Google Scholar] [CrossRef]
- Monarca, D.; Rossi, P.; Alemanno, R.; Cossio, F.; Nepa, P.; Motroni, A.; Gabbrielli, R.; Pirozzi, M.; Console, C.; Cecchini, M. Autonomous vehicles management in agriculture with Bluetooth low energy (BLE) and passive radio frequency identification (RFID) for Obstacle Avoidance. Sustainability 2022, 14, 9393. [Google Scholar] [CrossRef]
- Mekki, K.; Necibi, O.; Lakhdhar, S.; Gharsallah, A. A UHF/UWB monopole antenna design process integrated in an RFID reader board. J. Electromagn. Eng. Sci. 2022, 22, 479–487. [Google Scholar] [CrossRef]
- Cheng, X.; Yu, Y.; Wang, F.; Tian, G. A novel multiresonant chipless RFID tag for directional strain measurement on metal surface. IEEE Trans. Microw. Theory Tech. 2022, 71, 916–925. [Google Scholar] [CrossRef]
- Landaluce, H.; Arjona, L.; Perallos, A.; Falcone, F.; Angulo, I.; Muralter, F. A review of iot sensing applications and challenges using RFID and wireless sensor networks. Sensors 2020, 20, 2495. [Google Scholar] [CrossRef] [PubMed]
- Seyis, S.; Sönmez, A.M. Analysis of the benefits, challenges and risks for the integrated use of BIM, RFID and WSN: A mixed method research. Constr. Innov. 2023, 23, 858–877. [Google Scholar] [CrossRef]
- Oğur, N.B.; Al-Hubaishi, M.; Çeken, C. IoT data analytics architecture for smart healthcare using RFID and WSN. ETRI J. 2022, 44, 135–146. [Google Scholar] [CrossRef]
- Mejjaouli, S. RFID-WSN-GPS-Based Cold Supply Chain Real-Time Monitoring and Control System. Arab. J. Sci. Eng. 2022, 47, 15117–15131. [Google Scholar] [CrossRef]
- Pan, C.; Liu, M. Optimization of intelligent logistics supply chain management system based on wireless sensor network and RFID technology. J. Sens. 2021, 2021, 8111909. [Google Scholar] [CrossRef]
- Rahman, M.M.; Ryu, H.G. Poster: RFID based WSN communication system in interference channel. In Proceedings of the 2021 IEEE International Symposium on Local and Metropolitan Area Networks (LANMAN), Boston, MA, USA, 12–14 July 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–2. [Google Scholar]
- Li, Z.; He, G.; Xu, D.; Wang, S. Evaluation of Centralized Reader Anti-Collision Protocols for Mobile RFID System Based on Maximum Independent Set: A Simulation Study. IEEE Access 2020, 8, 123381–123397. [Google Scholar] [CrossRef]
- Kumar, A.; Aggarwal, A.; Gopal, K. A novel and efficient reader-to-reader and tag-to-tag anti-collision protocol. IETE J. Res. 2021, 67, 301–312. [Google Scholar] [CrossRef]
- Golsorkhtabaramiri, M.; Tahmasbi, M.; Ansari, S. A distributed mobile reader collision avoidance protocol for dense RFID networks. Wirel. Pers. Commun. 2022, 125, 2719–2735. [Google Scholar]
- Birari, S.M.; Iyer, S. PULSE: A MAC protocol for RFID networks. In Embedded and Ubiquitous Computing—EUC 2005 Workshops, Proceedings of the International Conference on Embedded and Ubiquitous Computing, Nagasaki, Japan, 8–9 December 2005; Springer: Berlin/Heidelberg Germany, 2005; pp. 1036–1046. [Google Scholar] [CrossRef]
- Olaleye, O.G.; Ali, A.; Perkins, D.; Bayoumi, M. Modeling and performance simulation of PULSE and MCMAC protocols in RFID-based IoT network using OMNeT++. In Proceedings of the 2018 IEEE International Conference on RFID, Orlando, FL, USA, 10–12 April 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–5. [Google Scholar]
- Mitton, N.; Mbacke, A.A.; Rivano, H. Distributed efficient & fair anticollision for RFID protocol. In Proceedings of the WiMob, New York, NY, USA, 17–19 October 2016. [Google Scholar]
- Mbacke, A.A.; Mitton, N.; Rivano, H. RFID anticollision in dense mobile environments. In Proceedings of the IEEE WCNC, San Francisco, CA, USA, 19–22 March 2017; pp. 1–6. [Google Scholar]
- Amadou, I.; Mitton, N. HAMAC: High adaptive MAC protocol for dense RFID reader-to-reader networks. In Proceedings of the Ad Hoc Networks, 7th International Conference, AdHocNets 2015, San Remo, Italy, 1–2 September 2015; Springer: Cham, Switzerland, 2015; pp. 82–93. [Google Scholar]
- Mafamane, R.; Mansour, A.A.; Ouadou, M.; Minaoui, K. FTSMAC: A Multi-Channel Hybrid Reader Collision Avoidance Protocol for RFID Network. J. Sens. Actuator Netw. 2021, 10, 46. [Google Scholar] [CrossRef]
- Mafamane, R.; Ouadou, M.; Sahbani, H.; Ibadah, N.; Minaoui, K. DMLAR: Distributed Machine Learning-Based Anti-Collision Algorithm for RFID Readers in the Internet of Things. Computers 2022, 11, 107. [Google Scholar] [CrossRef]
- Cao, B.; Gu, Y.; Lv, Z.; Yang, S.; Zhao, J.; Li, Y. RFID reader anticollision based on distributed parallel particle swarm optimization. IEEE Internet Things J. 2020, 8, 3099–3107. [Google Scholar] [CrossRef]
- Ferrero, R.; Gandino, F.; Montrucchio, B.; Rebaudengo, M. A fair and high throughput reader-to-reader anticollision protocol in dense RFID networks. IEEE Trans. Ind. Informat. 2012, 8, 697–706. [Google Scholar] [CrossRef]
- Li, Z.; He, G.; Wang, S. NFRA-AIC: A RFID reader anti-collision protocol with adaptive interrogation capacity. IEEE Access 2019, 7, 86493–86509. [Google Scholar] [CrossRef]
- Nawaz, F.; Jeoti, V. NFRA-C, neighbor friendly reader to reader anti-collision protocol with counters for dense reader environments. J. Netw. Comput. Appl. 2015, 49, 6067. [Google Scholar] [CrossRef]
- Xia, M.; Yu, Q.; Li, Z. Relative density based anti-collision algorithm in RFID networks with dense readers. In Proceedings of the TENCON-IEEE Region 10th Conference, Macao, China, 1–4 November 2015; p. 15. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attributes | PULSE | DEFAR | MCMAC | CORA | HAMAC | FTSMAC | DMLAR | NFRA | Proposed DTS-AC |
|---|---|---|---|---|---|---|---|---|---|
| RRI | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| RTI | ✓ | ✓ | - | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| Distributed | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | - | ✓ |
| Centralized | - | - | - | - | - | - | - | ✓ | - |
| ML-based | - | - | - | - | - | - | ✓ | - | - |
| Multi-data channel | - | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | - | ✓ |
| CSMA | ✓ | ✓ | ✓ | - | ✓ | ✓ | - | ✓ | ✓ |
| FDMA | - | - | ✓ | - | - | ✓ | ✓ | - | ✓ |
| TDMA | - | ✓ | ✓ | ✓ | - | ✓ | ✓ | ✓ | ✓ |
| Message Type | READER_ SENDER | READER_ RECEIVER | ELIMINATE_TS |
|---|---|---|---|
| REQUEST1 | ✓ | _ | ✓ |
| REQUEST2 | ✓ | _ | _ |
| RESPONSE1 | ✓ | ✓ | _ |
| RESPONSE2 | ✓ | ✓ | _ |
| TS_select | _ | ✓ | _ |
| Message Type | READER_SENDER | READER_ RECEIVER | READER_IN_CHAIN | AFECT _FREQ |
|---|---|---|---|---|
| REQUEST1 | ✓ | - | ✓ | - |
| REQUEST2 | ✓ | - | - | - |
| RESPONSE | ✓ | ✓ | - | - |
| ADD_TO_CHAIN | - | ✓ | - | ✓ |
| NEW_CHAIN | - | ✓ | - | ✓ |
| Parameter | Value |
|---|---|
| Number of readers (sparse network) | 10, 20, …, 50 |
| Number of readers (dense network) | 50, 100, …, 250 |
| Number of tags | 100 |
| Reader and Tag position | Random |
| Type of antenna | Omni-directional |
| Read range of data channel (rr) | 3, 5 m |
| Read range of control channel (crr) | 2 × rr |
| Number of Data Channel | 7 |
| Number of Time Slot (case 1) | 7 |
| Number of Time Slot (case 2) | 1, 2, 3, 4, 5, 6, 7 |
| Number of control channel | 1 |
| protocols compared | FTSMAC, Pulse, MCMAC, CORA |
| Backoff | (ReaderID − 1) × CW |
| CW | Convergence time of all readers |
| Tmin | 5 ms (Standard EPC) |
| T | Neighboring readers’ response time |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ouadou, M.; Mafamane, R.; Minaoui, K. A Hybrid Anti-Collision Protocol Based on Frequency Division Multiple Access (FDMA) and Time Division Multiple Access (TDMA) for Radio Frequency Identification (RFID) Readers. Network 2024, 4, 217-236. https://doi.org/10.3390/network4020011
Ouadou M, Mafamane R, Minaoui K. A Hybrid Anti-Collision Protocol Based on Frequency Division Multiple Access (FDMA) and Time Division Multiple Access (TDMA) for Radio Frequency Identification (RFID) Readers. Network. 2024; 4(2):217-236. https://doi.org/10.3390/network4020011
Chicago/Turabian StyleOuadou, Mourad, Rachid Mafamane, and Khalid Minaoui. 2024. "A Hybrid Anti-Collision Protocol Based on Frequency Division Multiple Access (FDMA) and Time Division Multiple Access (TDMA) for Radio Frequency Identification (RFID) Readers" Network 4, no. 2: 217-236. https://doi.org/10.3390/network4020011
APA StyleOuadou, M., Mafamane, R., & Minaoui, K. (2024). A Hybrid Anti-Collision Protocol Based on Frequency Division Multiple Access (FDMA) and Time Division Multiple Access (TDMA) for Radio Frequency Identification (RFID) Readers. Network, 4(2), 217-236. https://doi.org/10.3390/network4020011