
TSN Network Scheduling—Challenges and Approaches


Abstract
:1. Introduction
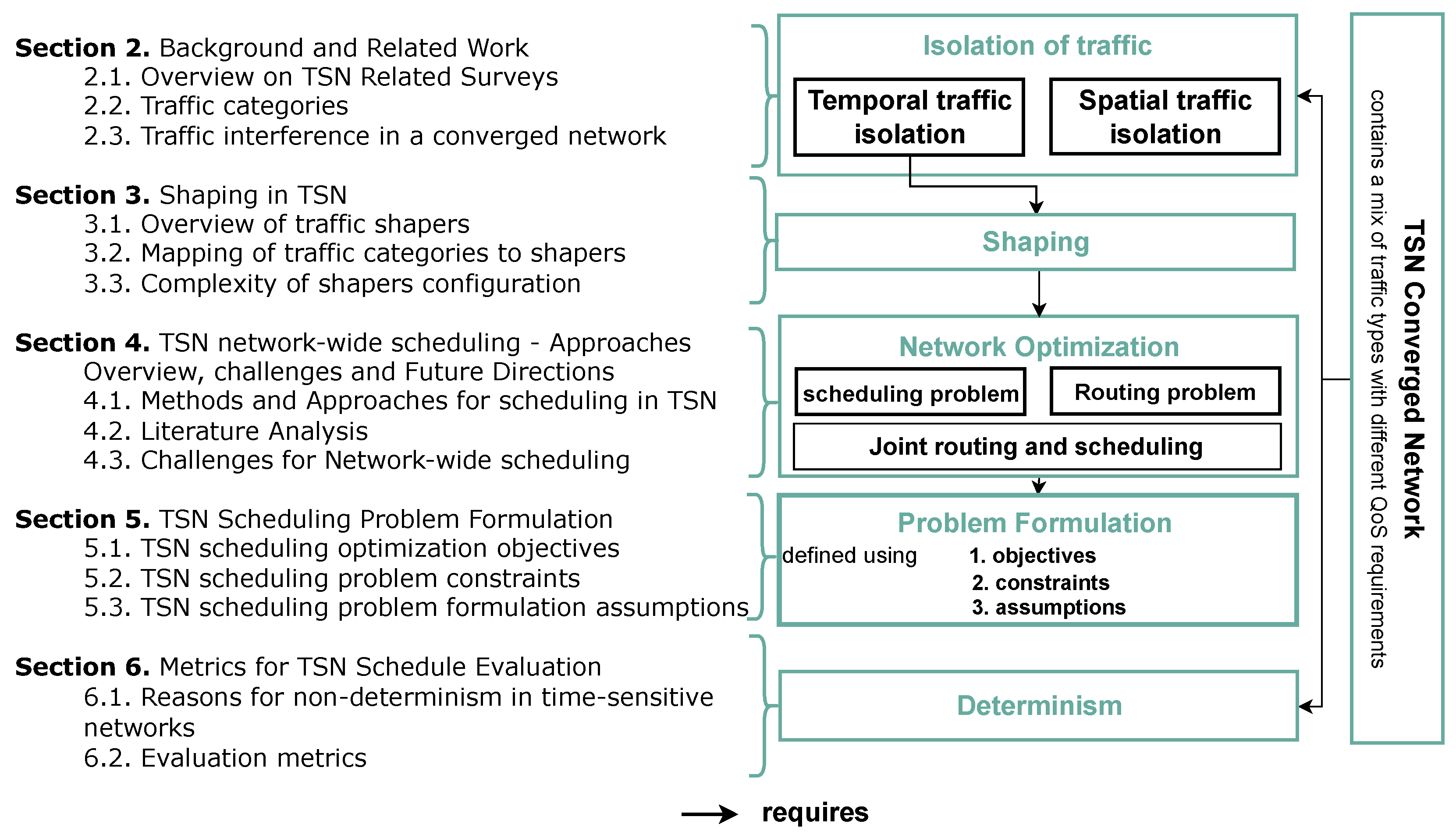
2. Background and Related Work
2.1. Overview on TSN Related Surveys
2.2. Traffic Categories
- Traffic regularity: defines if the traffic sending is periodic (cyclic) or irregular (acyclic);
- Timeliness: defines if Ethernet packets are sent at predefined or scheduled times (time-triggered) or not;
- Delivery mode: defines the requirements for receiving the packets in terms of maximum latency or if the packets should obey a given deadline.
2.3. Traffic Interference in a Converged Network
3. Shaping in TSN
3.1. Overview of Traffic Shapers
3.2. Mapping of Traffic Categories to Shapers
3.3. Complexity of Shapers Configuration
- Cycle duration: A long cycle duration may increase jitter and violate the maximum latency requirement of the streams. On the other hand, a short cycle duration may be insufficient for transmitting the frame during the allotted slot.
- The alignment of the start and end times of the cycle among the involved switches: All switches must agree on the starting time of the cycles, which must be enforced by a centralized or decentralized configuration.
- The cycle boundaries within a switch: As the reception of a frame happens during a time interval, the receiving and the sending switches shall assign this time interval to the same given cycle. Otherwise, the forwarding of the receiving switch would be delayed by an additional cycle.
- The earliest and the latest times that a switch could transmit a frame within a cycle: This is important to minimize the impact of time synchronization errors. If TSN switches are not properly synchronized, a switch may send a frame at cycle i and the next switch may receive it during cycle or cycle . This may lead to a situation where the accumulated end-to-end latency could violate the requirements.
4. TSN Network-Wide Scheduling—Approaches Overview, Challenges, and Future Directions
4.1. Methods and Approaches for Scheduling in TSN
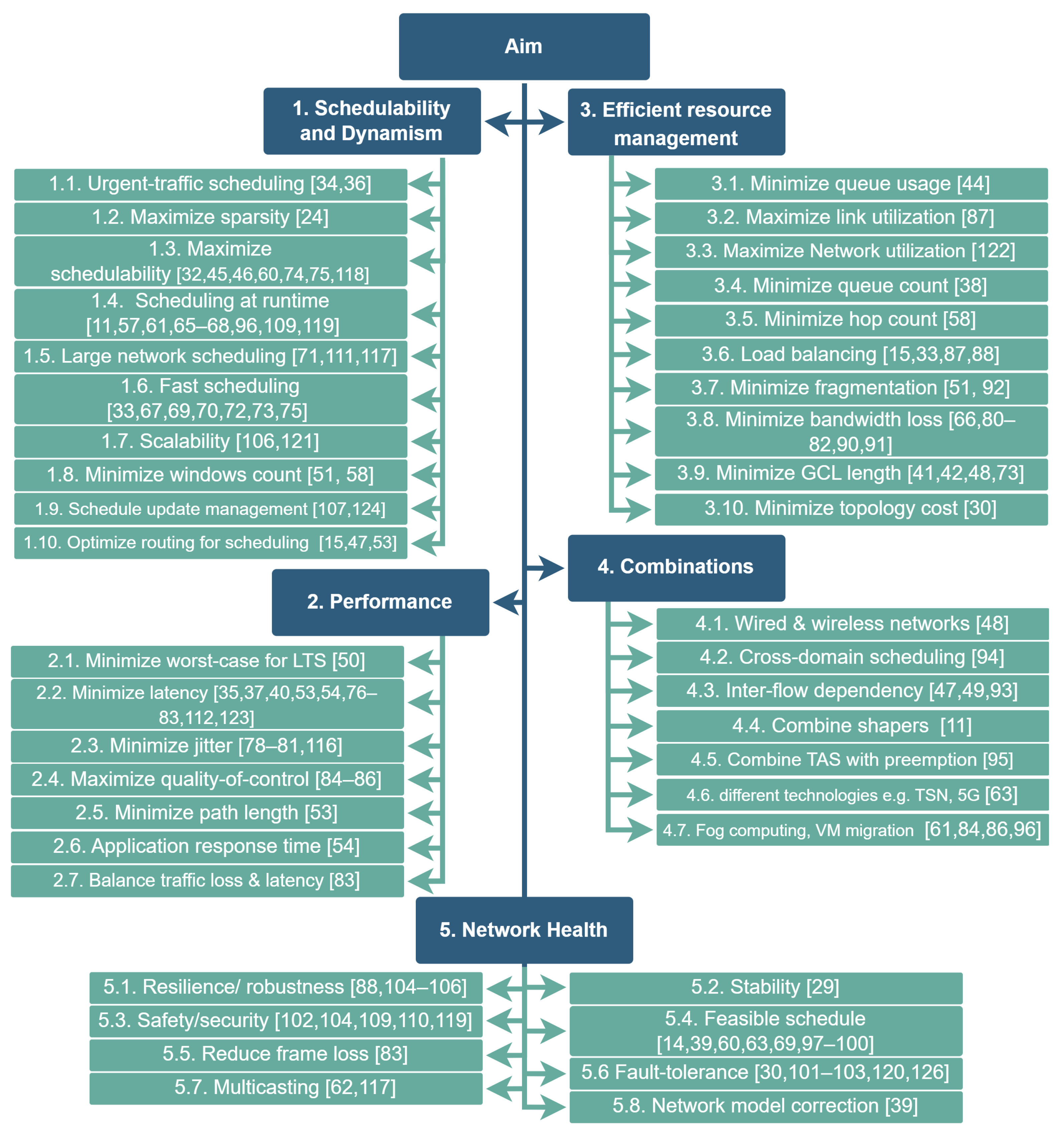
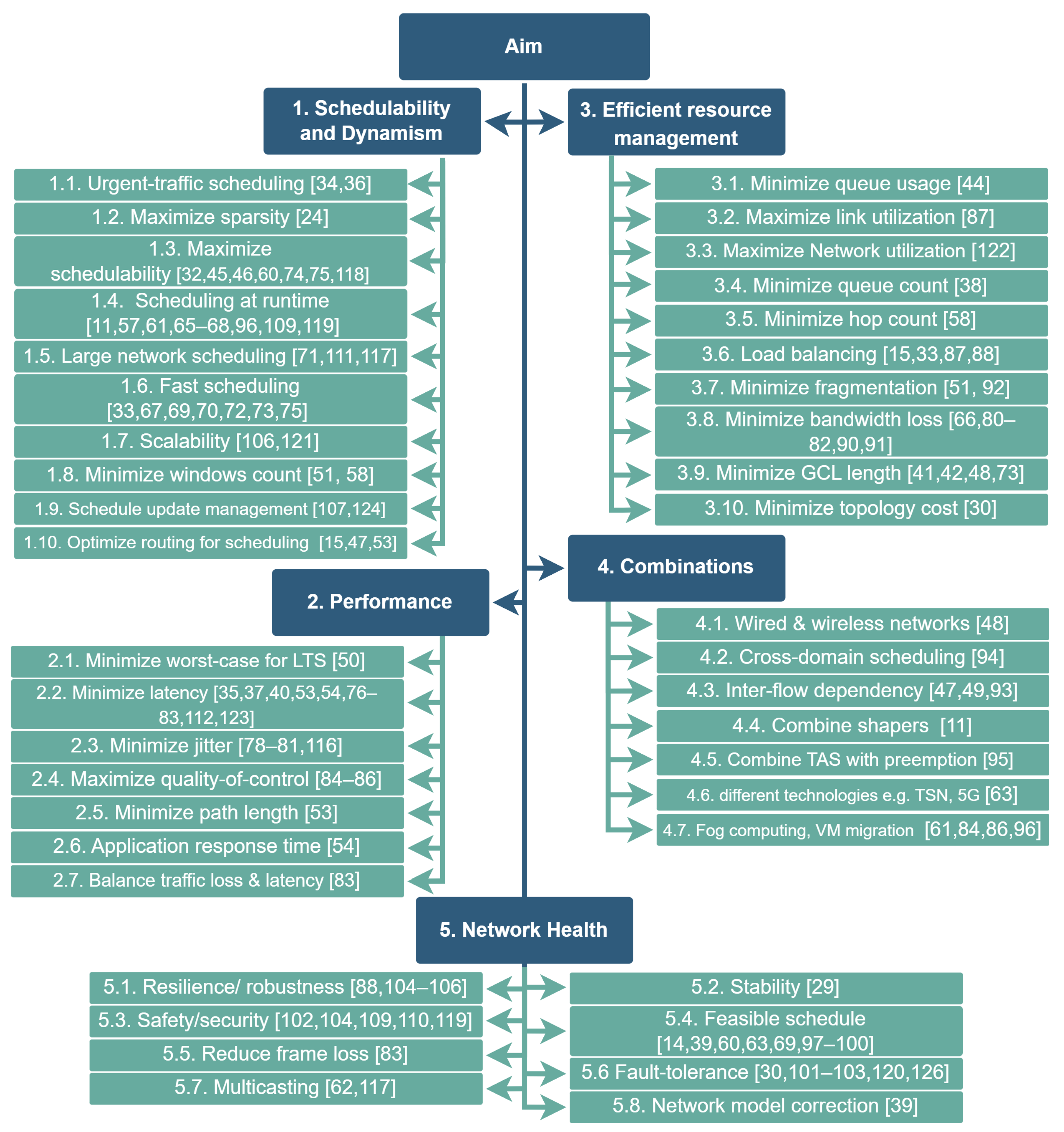
4.1.1. Schedulability and Dynamism
4.1.2. Network Performance
4.1.3. Efficient Resource Management
4.1.4. Combinations
4.1.5. Network Health
4.2. Literature Analysis
4.2.1. Diversity of Application Areas
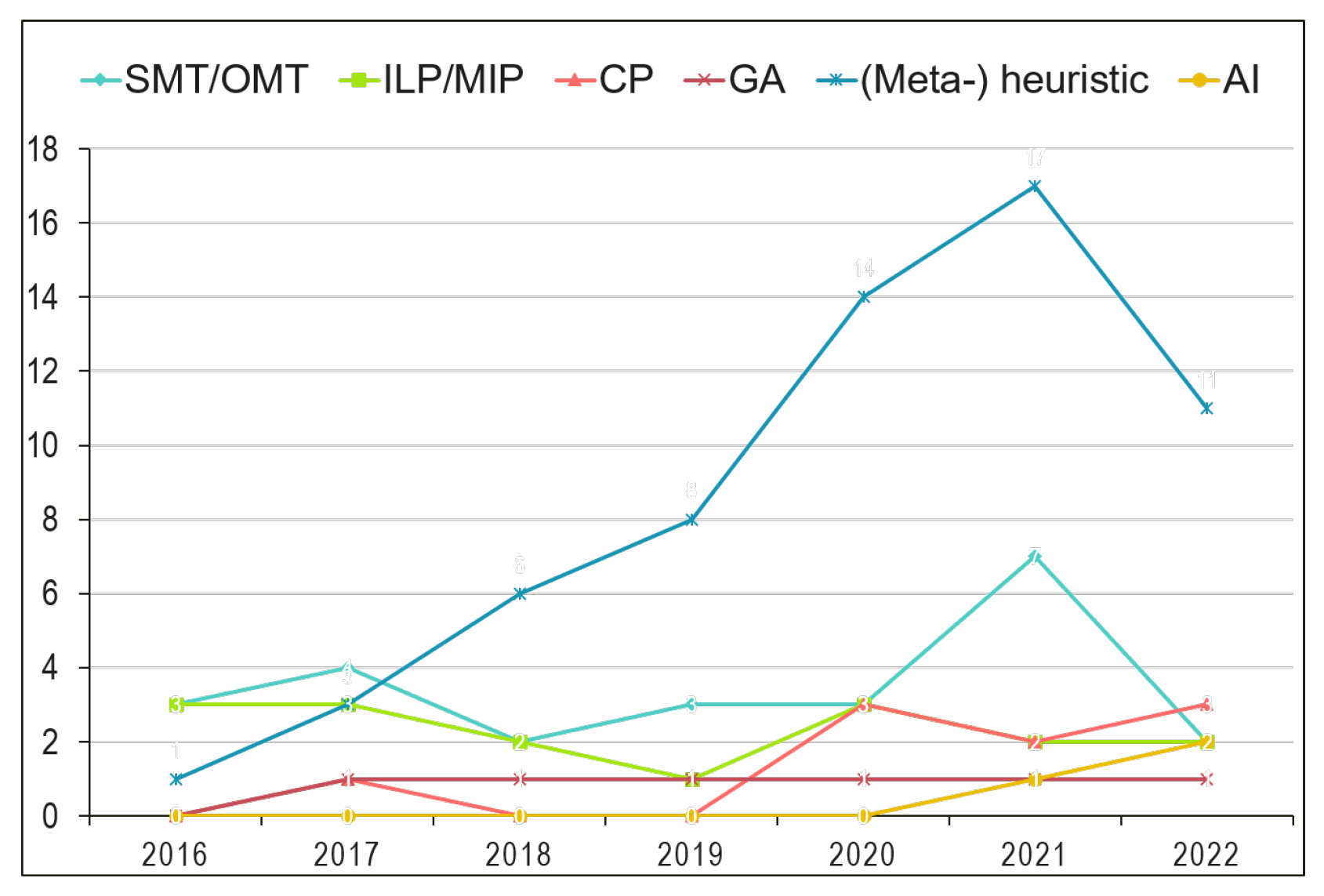
4.2.2. Diversity of Approaches
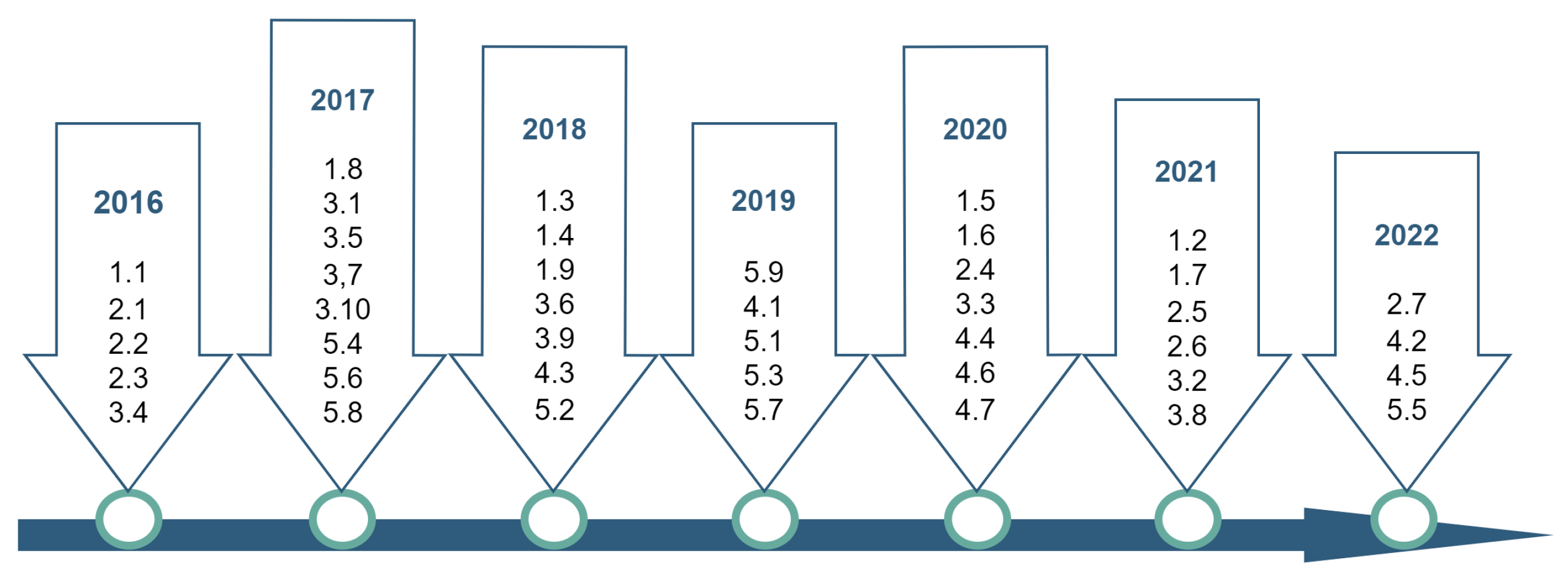
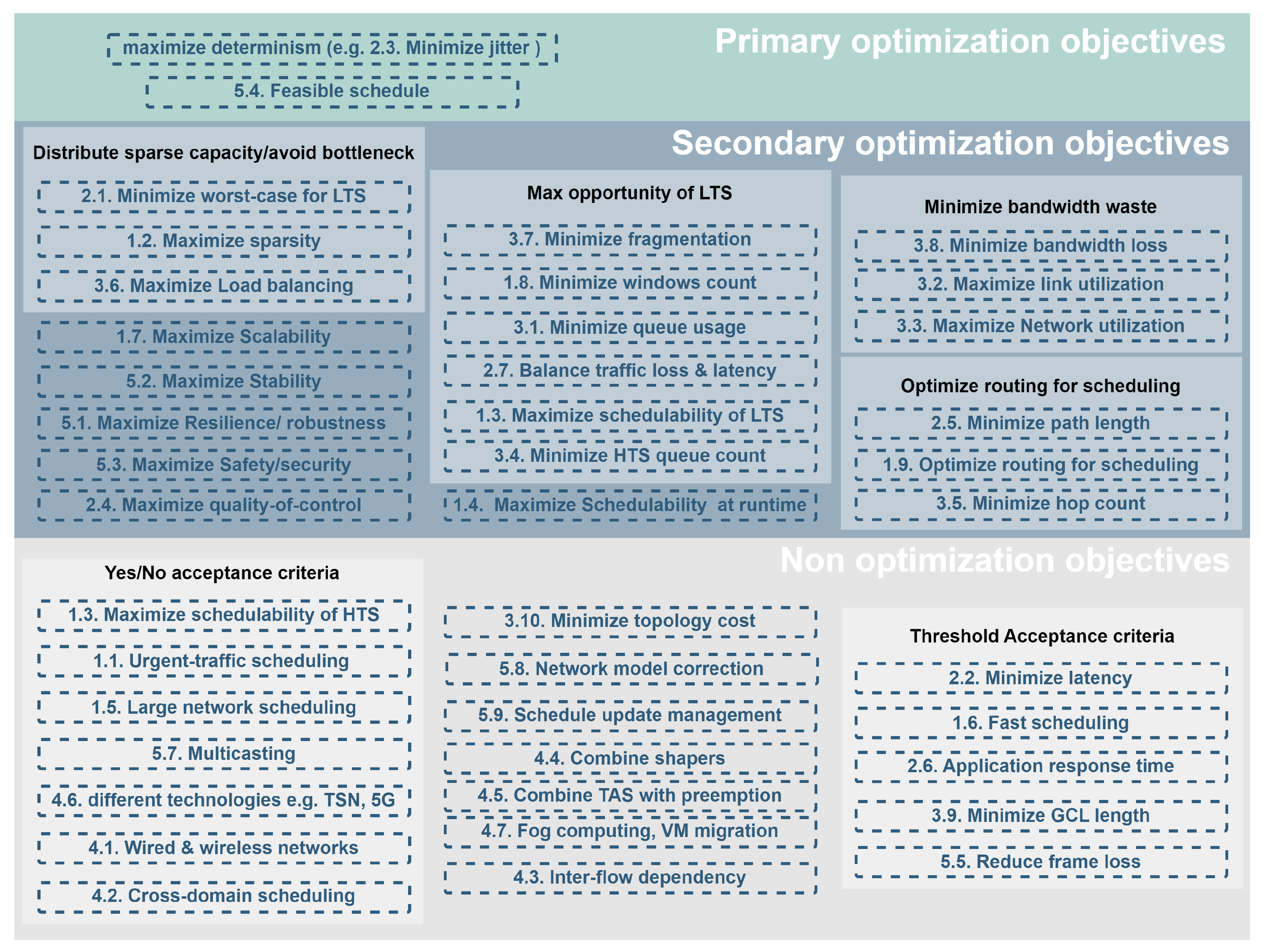
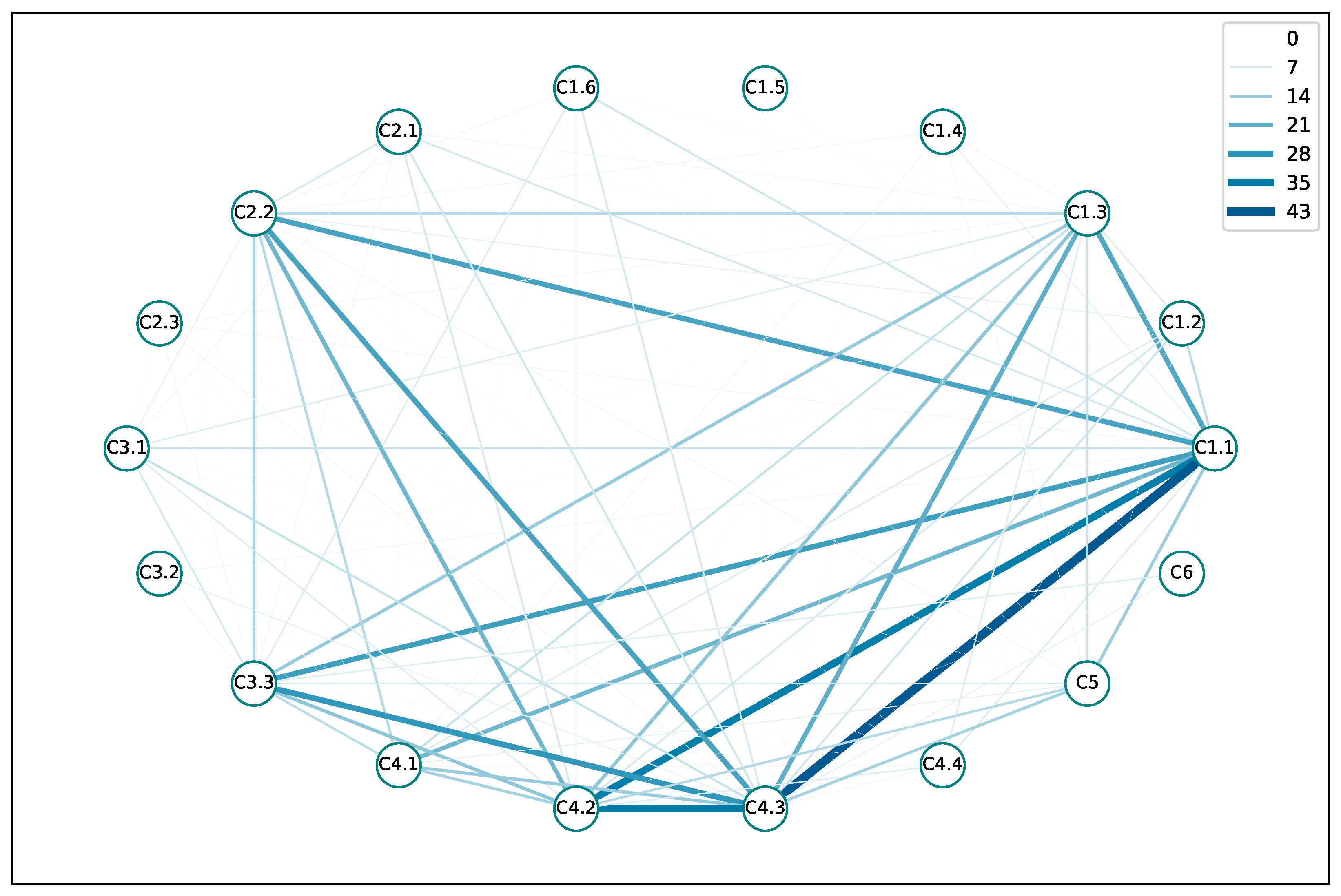
4.2.3. Diversity of Objectives
4.2.4. Expansion of the Scope of the Problem
4.2.5. Diversity of Shapers/Use Case Specifications
4.3. Challenges for Network-Wide Scheduling
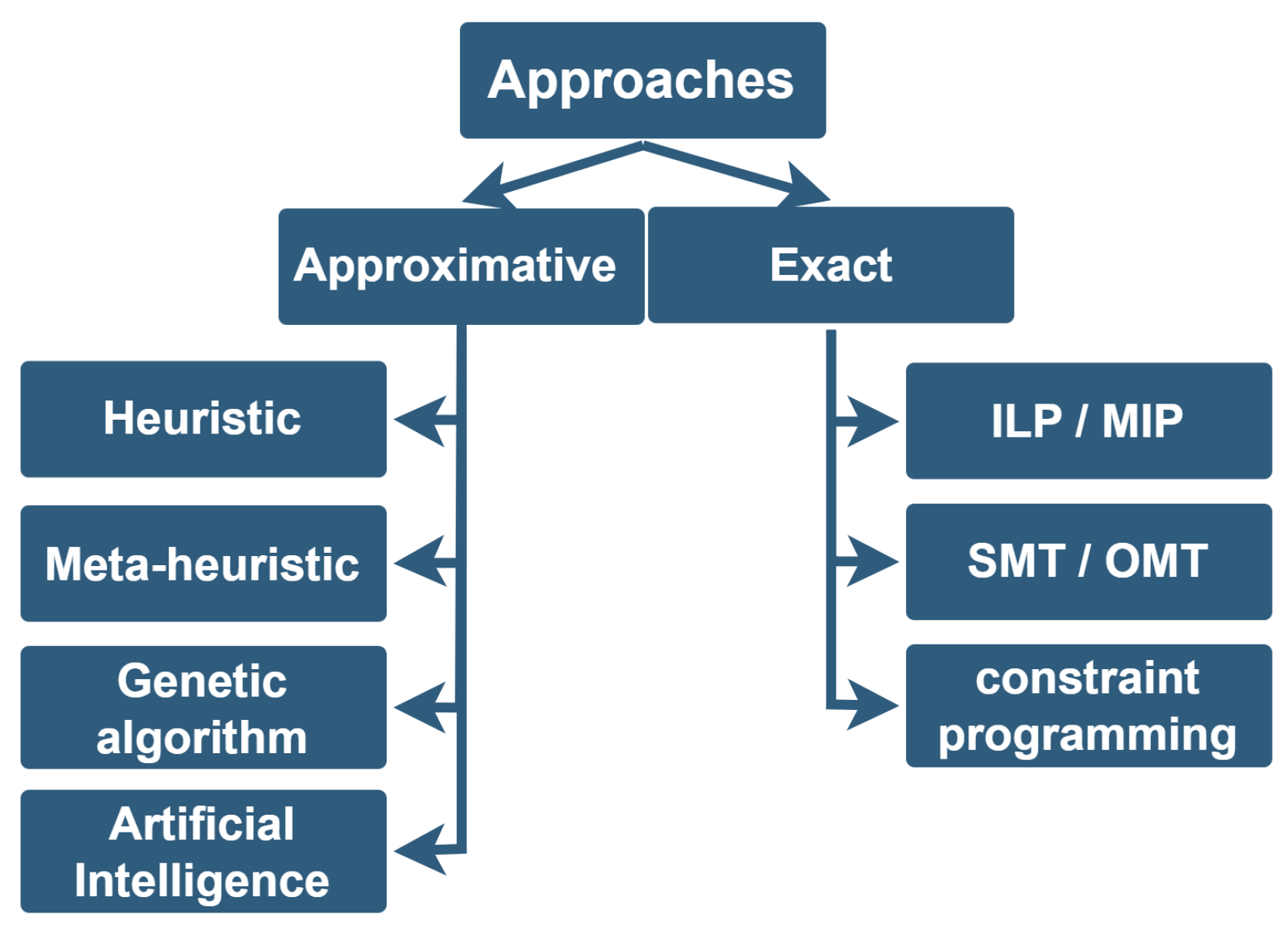
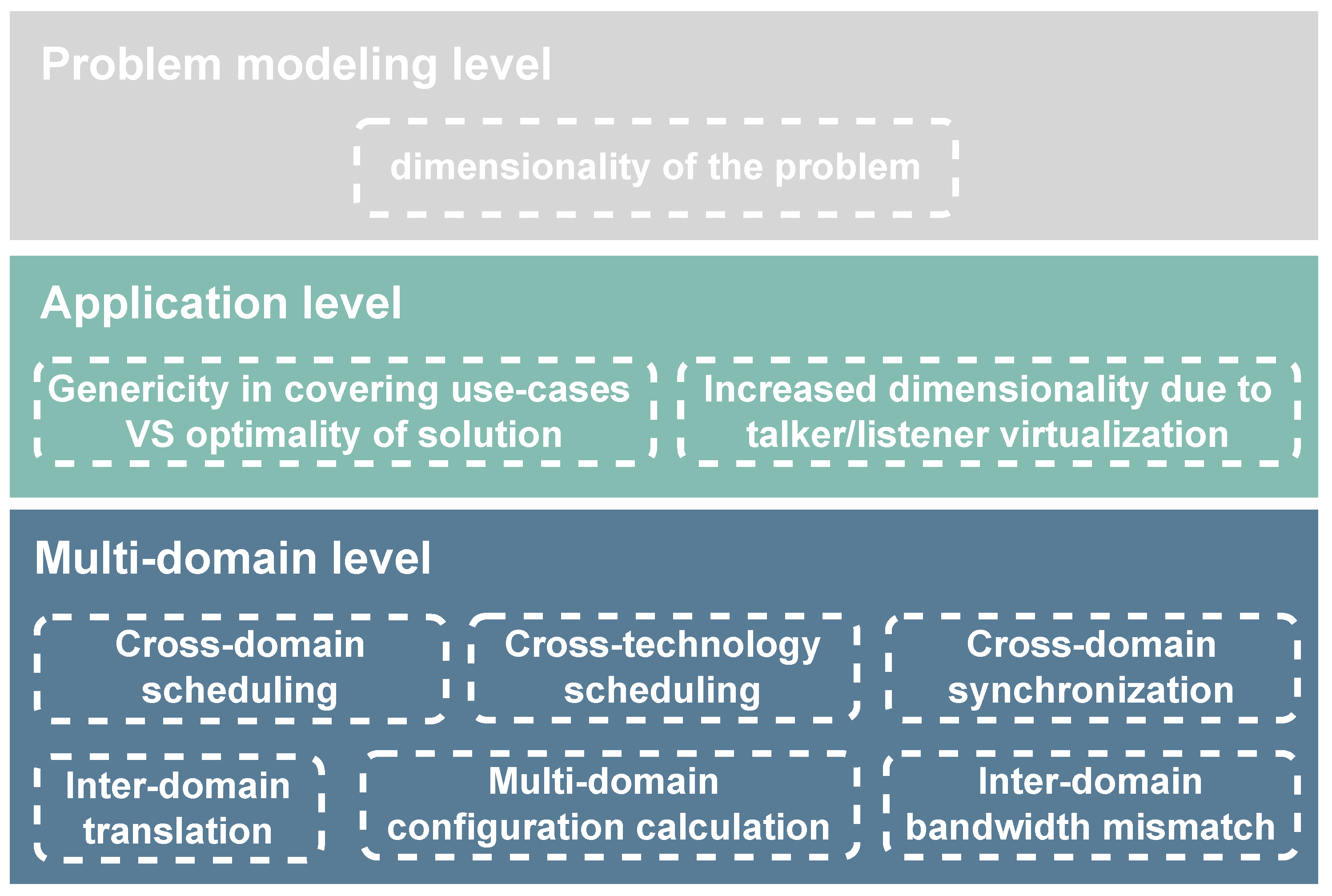
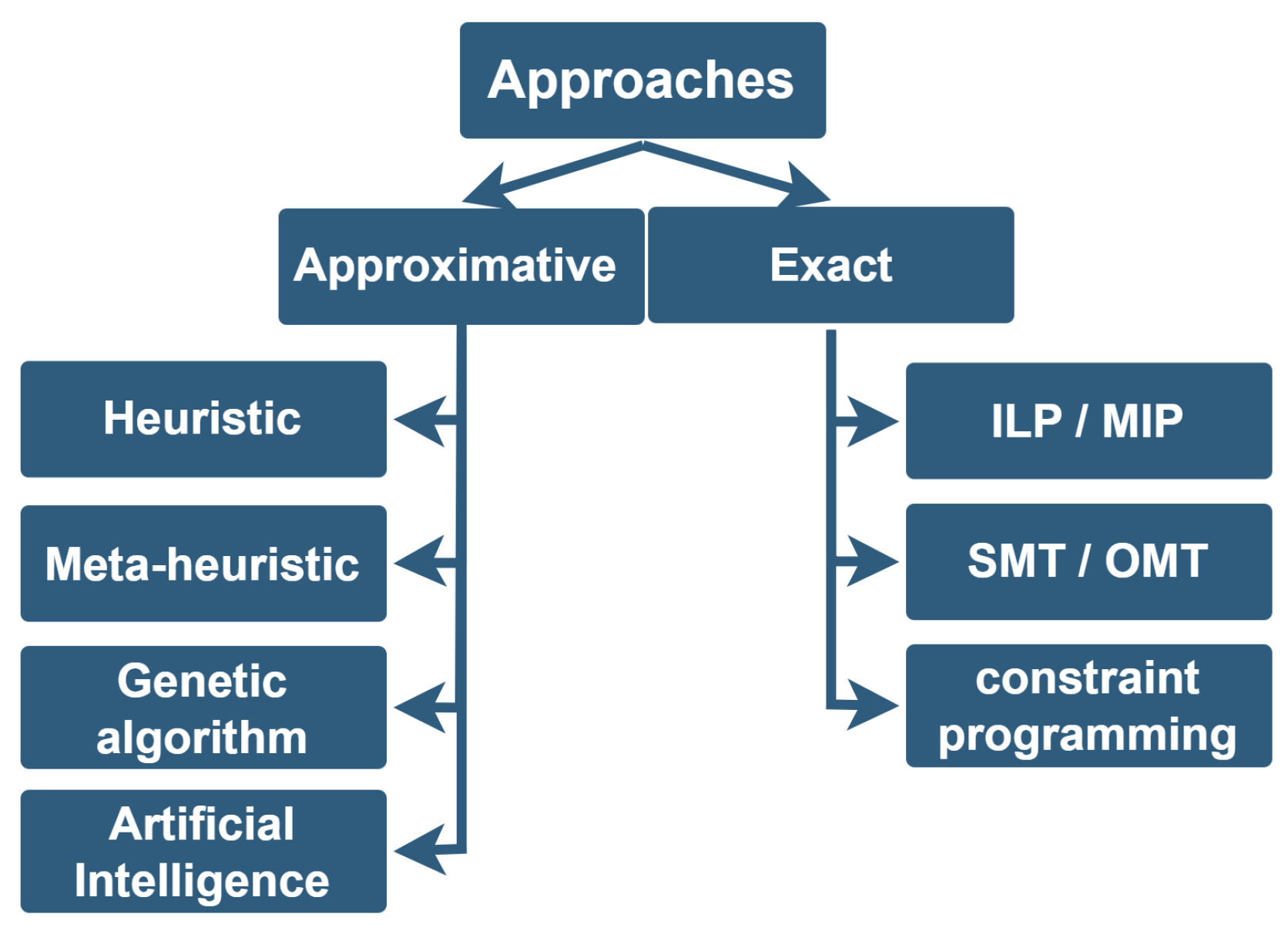
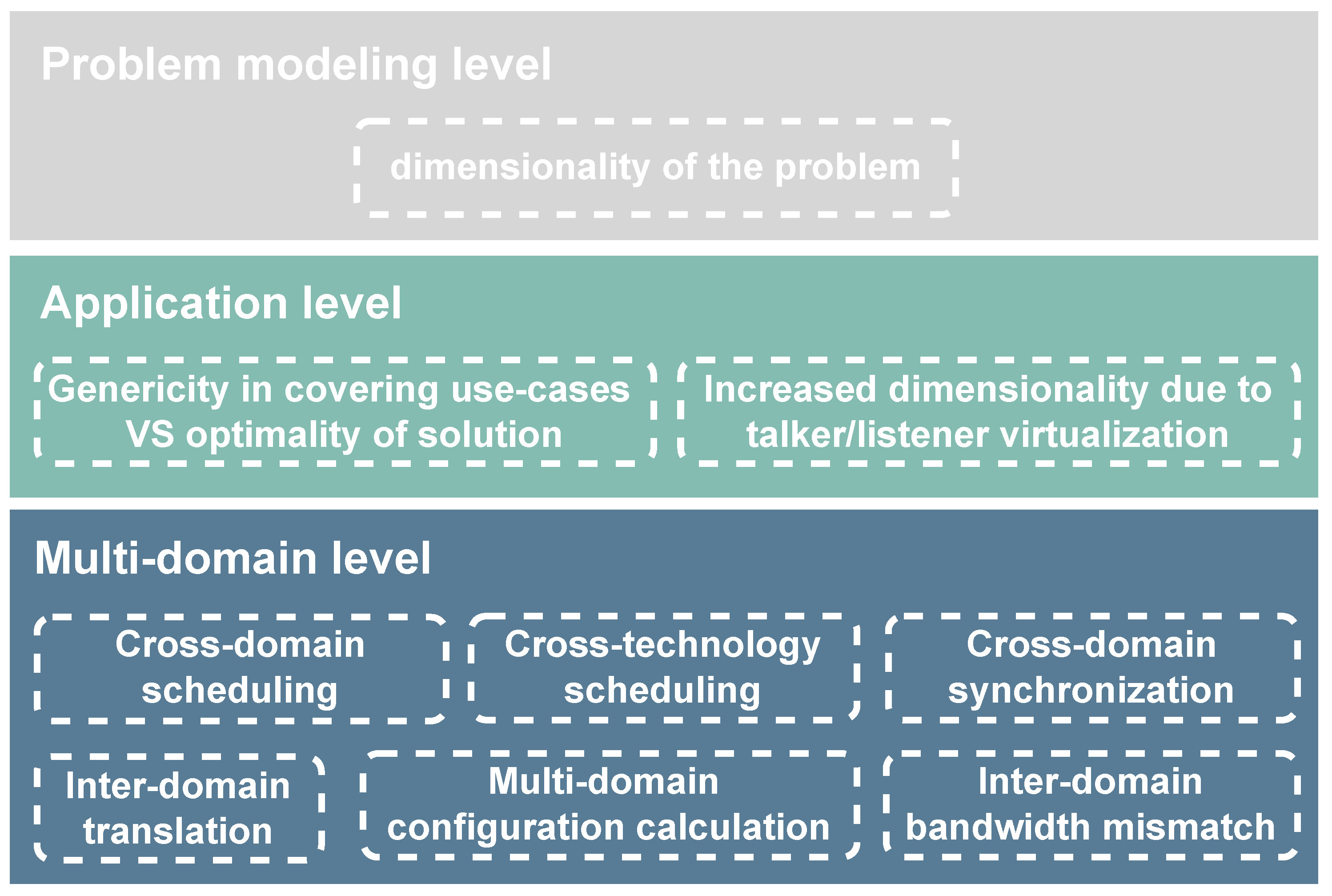
- Problem modeling level:Regardless of the used methods to solve the problem, the dimensionality of the problem poses a challenge. In legacy Ethernet, forwarding traffic requires solving the routing problem and assigning flow priorities. This still holds in TSN networks but with the addition of the time dimension. As stated previously, there are generally two main approaches for scheduling: exact approach (i.e., mathematical formulation as an optimization problem with off-the-shelf solvers) or heuristic/metaheuristic design. Solving the network-wide scheduling problem has a high problem dimensionality due to the many constraints and decision variables when using exact methods. Ref. [8] shows that the number of constraints increases with the number of switches and quadratic with the number of frames. Therefore, large use cases with many streams to schedule may lead to excessive runtime of the solver in many cases (e.g., when using SMT solvers). One main problem is the existence of binary and/or integer variables that require combinatorial optimization methods to be applied. To reduce the dimensionality and, thus, the problem complexity, several works fix some of the variables, which reduces the runtime at the expense of solution optimality. For example, ref. [47] modeled the scheduling and routing problems jointly using a genetic algorithm. The challenge facing this approach is gene encoding. Solving routing with genetic algorithms consists of finding the mapping between a limited number of transmission windows and a limited number of ports. However, scheduling consists of finding the best instant to open the window, which could theoretically be anytime during the scheduling cycle. Therefore, encoding all possible times leads to an exploding size of the gene. Ref. [47] avoided this problem by finding the path using the genetic algorithm and inferring the schedule once the paths are fixed as the earliest time that the stream can traverse all the links in its path without interference.
- Application level:
- -
- Due to many mechanisms and standards, TSN is gaining attention from several industries with very divergent use cases. Each use case may require different mechanisms. Therefore, the standardization community is trying to define different profiles. A profile specifies the set of choices (i.e., features, default configuration values, etc.) to apply. Table 4 summarizes the current TSN profiles per application area. The divergence between the requirements of applications from different areas places the scheduling algorithms against the challenge of being generic enough to serve applications belonging to different areas while being specific enough to provide optimal schedules for all applications regardless of their divergent requirements.
- -
- A second challenge on the application level is related to the virtualization of end-hosts. With the introduction of virtual PLCs and NFV that could be deployed in a set of possible edge compute nodes having TSN stacks and hardware support, the end-host could be attached to different locations in the topology. This brings an additional degree of freedom that could increase the solution space but also complicates the scheduling further to the increased problem dimensionality.
- Multi-domain level:TSN Ethernet as a deterministic networking technology is not alone in the ultra-low latency ecosystem. Other technologies such as 5G, Deterministic Networks (DetNet), and wireless TSN are also gaining momentum. Industrial applications could involve any combination of these technologies in a large-scale hybrid network. Similar problems exist in a pure TSN setup where multiple domains are involved. One example presented in [59] is the in-vehicle network where electronics and mechanical systems are distributed in domains (e.g., autonomous driving domain, power train domain, chassis domain, body domain, telematics, and infotainment). Cross-domain functionalities need the collaboration of different domain controllers. This setting brings about more challenges related to hybrid multidomain scheduling.
- -
- An important challenge to solve is a potential clock mismatch. Mechanisms such as TAS require network-wide synchronization. Technologies that support time synchronization such as 5G ease the problem slightly. Ref. [114] discusses the integration of TSN and 5G. Since 5G supports multiple time domains, it could join the TSN time domain by synchronizing one of its working clocks to the TSN master clock according to the gPTP procedure. However, this is not available in other scenarios such as having two TSN domains, each having its own controller and master clock. A possibility to cope with this challenge is to have a synchronization controller that resides at the border of all the domains and belongs to all of them. The synchronization controller could solve the problem by playing a GM role. Nonetheless, the synchronization controller would be a single point of failure. Another option is to introduce time awareness to the control plane such that the CNCs exchange synchronization information and consider the time difference while calculating the cross-domain schedule.
- -
- A second challenge is related to bandwidth mismatch. In this case, the interdomain interface could be a congestion point. Ref. [94] suggests using network slicing and queue length management to mitigate this mismatch.
- -
- A third challenge is related to the configuration generation for multidomain operation. The configuration could be generated centrally once the network-wide scheduling problem is solved by only one orchestrator and distributed to all network elements. Here, the other orchestrators should share their domain information. The challenge here is that different technologies have different features and a single orchestrator controlling all is not a viable solution. For example, the central network controller (CNC) from TSN does not support 5Gs control features such as network slicing, etc. The 3GPP suggested a solution in release 16/17 which exposes the 5Gs as a virtual switch to the CNC [114].
- -
- The same logic could be applied in the general case of multidomain configuration. Suppose we have two domains, each controlled by a separate controller. In that case, we can introduce a higher-level CNC that sees each domain as a virtual switch. The domain controller must then expose the domain’s resources as a virtual switch with certain capabilities. Afterward, the higher-level CNC calculates the global configuration and distributes it to controllers of the domains. Finally, each domain controller calculates and deploys the actual configurations such that it meets the configuration calculated by the higher CNC.
- -
- The previous mode of functioning combines centralized and distributed computation of configuration. However, such a hybrid mode has other challenges related to scheduling time and the control of traffic overhead. A third approach is the distributed mode, where every controller calculates the configuration of its domain locally without consulting the other controllers. This approach still needs an entity to verify the end-to-end requirement. That could be the talker and/or the listener, with the help of all the domain controllers in between. In this case, a distributed cross-domain scheduling protocol is required. As for the cross-domain scheduling algorithms, only a few works exist. For example, ref. [94] suggested a platform for cross-domain coscheduling based on CQF and CSQF (Cycle-Specified Queueing and Forwarding). The authors suggested some solutions for cycle and bandwidth mismatch but still have open issues related to reliability by frame replication and elimination and sporadic traffic handling.
- -
- A fourth challenge is related to the interface between the different domains. If domains involved in the forwarding of the frame are using different technologies, frames crossing the border between them need to be modified. Different technologies use different features and traffic formatting. For example, the priority of an Ethernet frame is encoded in the PCP field of the header, but for wireless communication, the packet header has a different structure (e.g., in the 5G system, the priority of a packet is encoded in the 5QI field). Therefore, a translator is required that rewrites packet headers or encapsulates packets and translates the time synchronization traffic without precision degradation. Ref. [115] suggested a hybrid architecture for a TSN device that allows the integration of wire-line and wireless TSN. In this regard, one challenge for distributed cross-domain scheduling is to consider the latency added by the translation operations at the translator. If the schedule is calculated centrally, then the centralized controller should have the information about the translator. However, in a distributed mode, every domain controller considers only the ports belonging to it, but the translator partially belongs to different domains. This brings additional complexity to the network-wide scheduling.
5. TSN Scheduling Problem Formulation
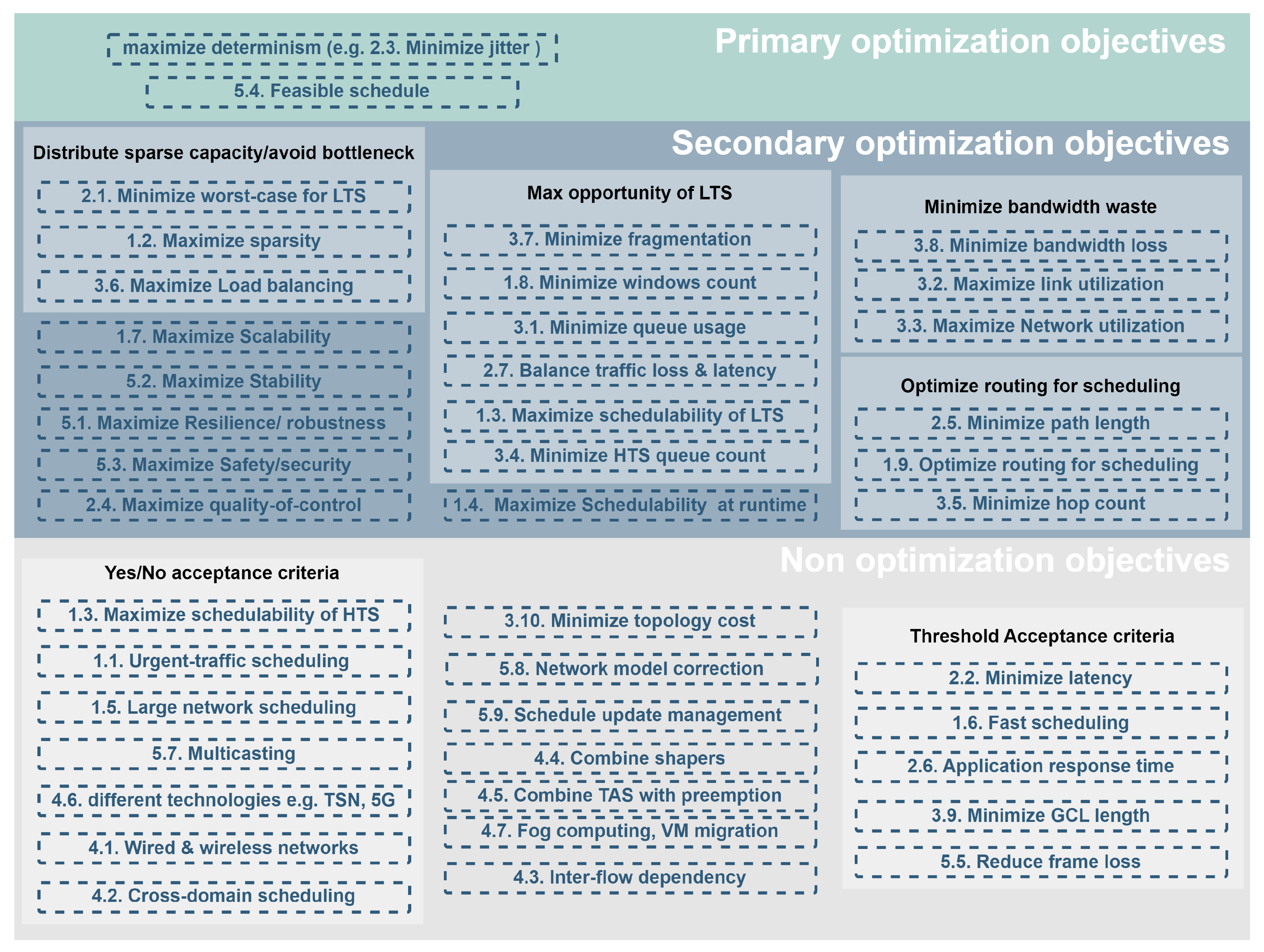
5.1. TSN Scheduling Optimization Objectives
5.2. TSN Scheduling Problem Constraints
- Constraints on the streams: This set of constraints aims to look at the interaction between the streams and the network. From one side, each stream individually has a set of requirements from the network (i.e., requirements on latency, jitter, periodicity, and reliability) and from another side, all the streams impose more requirements collectively (i.e., dependency between streams, and sharing of the network resources considering all the streams).
- (a)
- MaxLatency constraint [11,14,24,31,32,33,35,38,40,41,42,44,46,47,48,49,50,54,60,62,63,65,69,70,72,74,76,77,78,79,82,84,86,87,88,90,92,94,95,96,97,98,101,105,106,107,109,110,111,112,116,117,118,119,120,121]: This constraint was used in most of the works and limits the allowed end-to-end latency of the streams.
- (b)
- (c)
- Periodicity constraint [32,38,41,48,49,50,54,59,60,62,67,70,72,76,78,79,82,87,91,97,98,101,102,107,111,116,120]: This ensures that the full transmission is happening during the stream cycle, taking into consideration all the network delays (i.e., processing delay, propagation delay, transmission delay, and queuing delay)
- (d)
- (e)
- (f)
- Constraints on the queues: This set of constraints aims to look at the configuration of the queues in order to enforce a certain queuing discipline.
- (a)
- (b)
- Accessibility constraint [24,31,35,38,41,42,44,46,50,58,71,74,79,82,84,86,87,92,97,102,105,109,116,117,118,119,120,122]: This controls the order of frames in the queues or limits the access of the different frames/flows to a certain queue. This constraint is also called isolation constraint in the literature and it has different variations, e.g., frame isolation, flow isolation [38], and size-based isolation [116].
- (c)
- Constraints on the frames: This set of constraints aims to look at frame-related aspects concerning its specifications (e.g., size), its relation with other frames (e.g., sequencing of frames), and its relation with the network (e.g., path).
- (a)
- (b)
- (c)
- Routing constraints [14,29,30,37,38,40,42,47,49,50,58,59,60,67,69,70,72,74,78,79,84,87,98,101,104,106,109,110,112,119,120,121,122]: This constraint is used to enforce certain routing rules on the frames, e.g., to prevent loops in the path, to limit the number of hops in the path, or to ensure the frames belonging to the same stream follow the same path. This constraint could be applied to scheduling problem with fixed paths.
- Constraints on the transmission windows: This set of constraints aims to look at the transmission of frames in the link. It concerns the start and the end of transmission, and the spacing between consecutive transmissions.
- (a)
- (b)
- Offset constraint [14,24,29,31,32,33,41,42,44,46,48,54,59,62,63,66,69,70,71,74,76,78,84,86,90,91,92,95,96,97,102,104,105,107,111,112,117,118,119,120,121,122]: This controls the absolute positioning of the windows in relation to the gating cycle. This constraint ensures that the transmission of a frame is planned only after its full reception (i.e., enforce store-and-forward mode of functioning).
- (c)
- Overlap constraint [14,29,31,35,37,38,40,41,42,44,46,47,48,49,50,53,54,58,63,66,67,69,70,71,72,74,76,77,78,79,84,86,87,88,90,91,92,95,96,97,98,102,104,106,107,110,111,116,117,118,119,120,121,122]: This ensures the temporal isolation between frames on link usage and prevents the double assignment of a transmission window to a frame.
- (d)
- Some of the constraints in the reviewed literature are very dependent on the research question treated by the respective approach. Those constraints are not related to the scheduling problem itself; rather, they are needed to find feasible solutions. An example of such constraints are the ones used to comply with the functional safety standards, such as ASIL reqs constraints, as in [110], or the stability constraint used in [29] to enforce a stability margin in the solution. Other works treating application embedding introduced a constraint for the unique bending of the application in the end-hosts. Topology constraints are also considered problem-specific, as optimizing the topology is a step prior to its configuration.
5.3. TSN Scheduling Problem Formulation Assumptions
5.3.1. Assumptions on Synchronization
5.3.2. Assumptions on the Queues
5.3.3. Assumptions on the Forwarding Mode
5.3.4. Assumptions on the Cycles of the Streams
5.3.5. Assumptions on the Delays of the Network
5.3.6. Assumptions on Preemption
5.3.7. Assumptions on the Hardware
5.3.8. Assumptions on Traffic Characteristics
5.3.9. Assumptions on the Problem Design
6. Metrics for TSN Schedule Evaluation
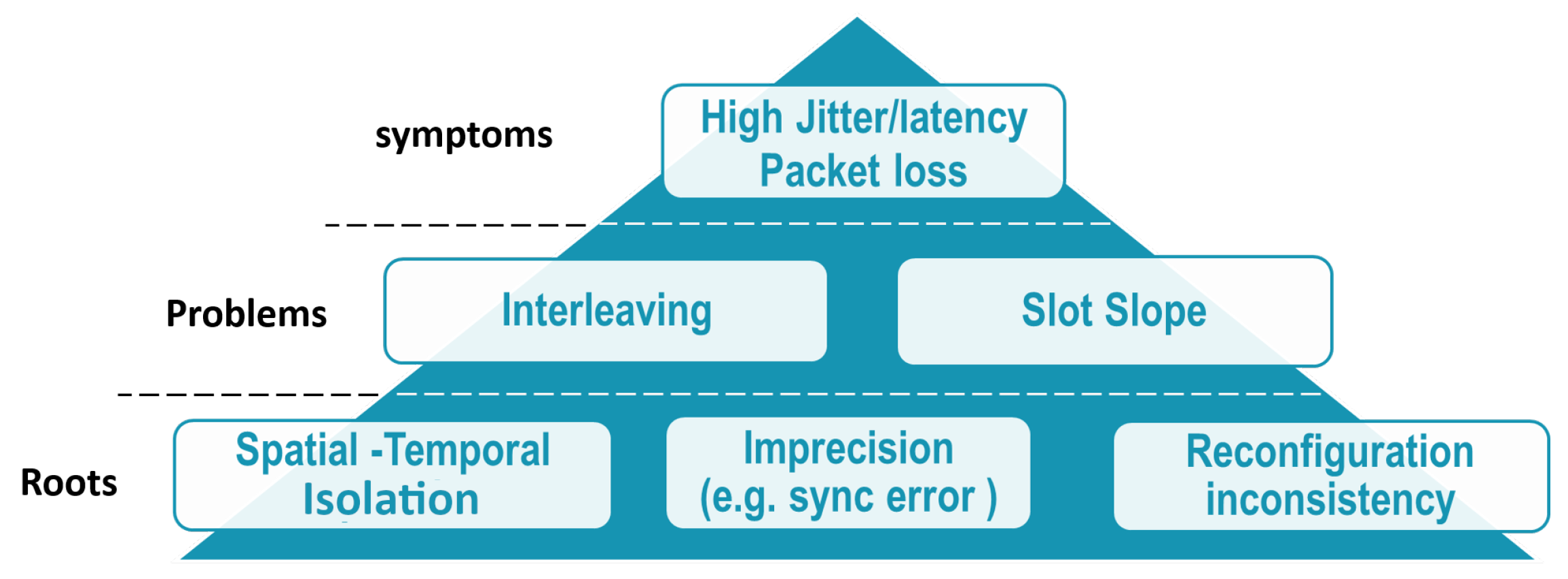
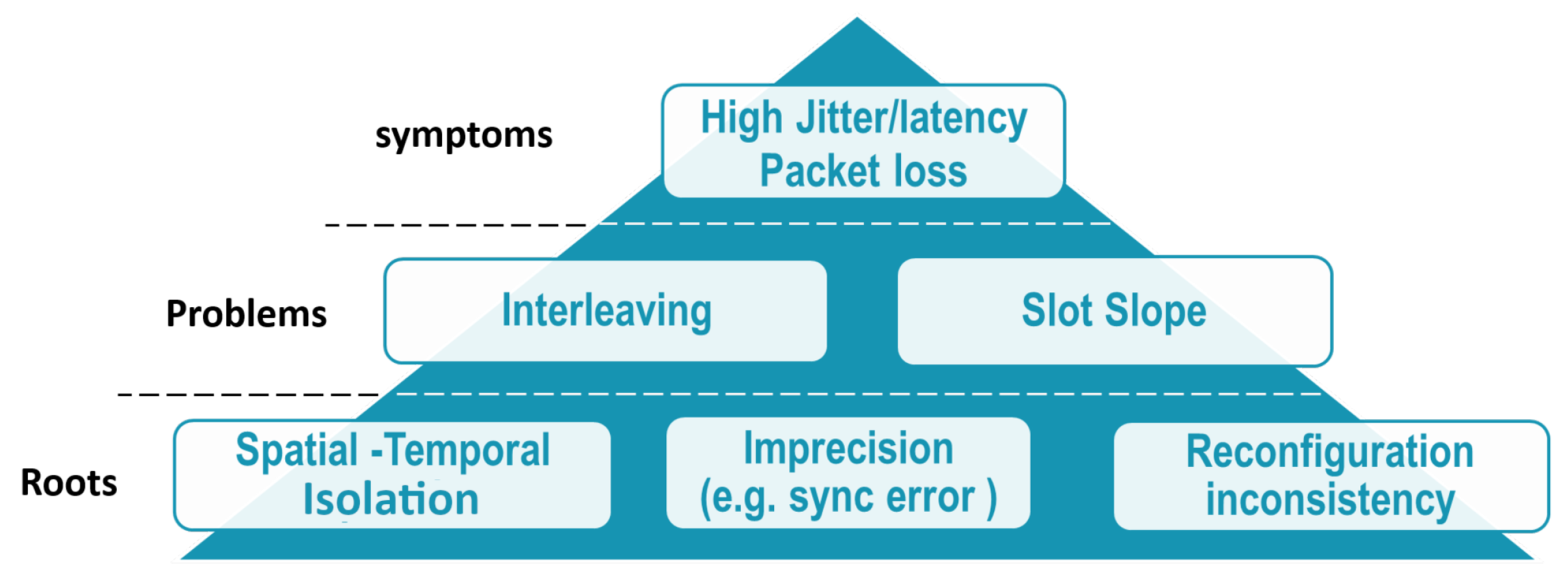
6.1. Reasons for Nondeterminism in Time-Sensitive Networks
6.1.1. Synchronization Errors
6.1.2. Ineffective Temporal/Spatial Isolation
6.1.3. Inconsistent Network Configuration Updates
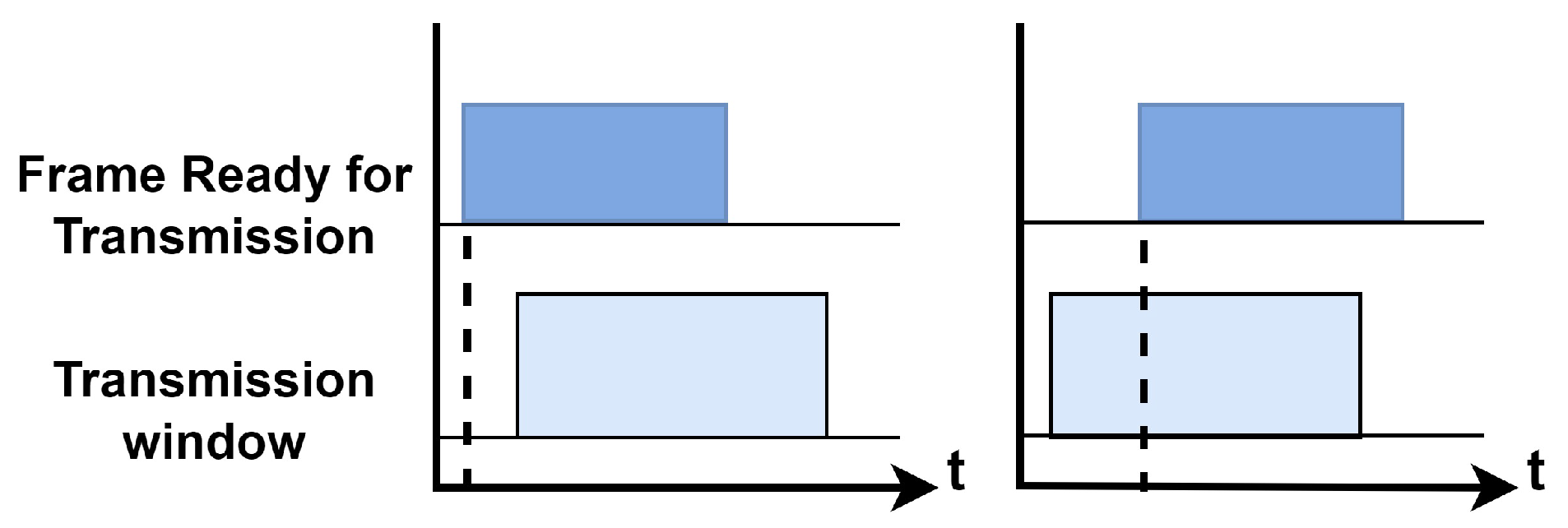
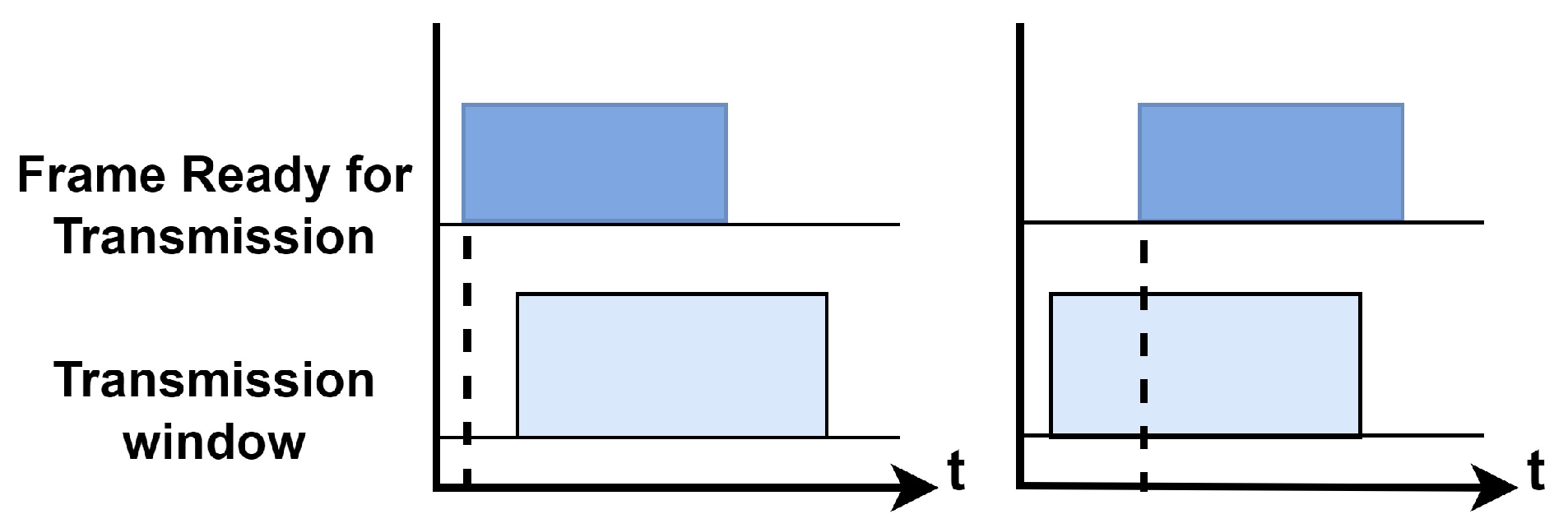
- Slot slope problem: A slot slope happens when a frame is ready for transmission, whether before or after the opening of its respective transmission window, as shown in Figure 10. This slope could be caused by a synchronization error or precision error in the planned gate opening timestamp. Large slopes result in frames missing their allotted transmission windows. Small slopes could be mitigated by the scheduling algorithm by introducing a tolerance interval to the length of the transmission window. The amount of tolerance is a scheduling choice. Bigger tolerance intervals (i.e., larger HTS slots) reduce the effect of slope since they reserve more time for HTS transmission. The extra transmission time could be used by the other traffic types. Therefore, a large HTS slot reduces the chances of LTS and BE traffic. On the other hand, very small tolerance (i.e., small HTS slots) could cause the frames to miss their allotted times easily. The lookahead mechanism checks if the remaining time is enough to send the frame before the gate closes, otherwise it blocks the sending. A synchronization error or an incomplete previous transmission (especially if guard-banding is not applied) could trigger the lookahead mechanism to consider the small HTS slot insufficient and deny the transmission. Paths with many hops can contribute to slope accumulation as well, especially if the HTS slots are too wide. Thus, a schedule should have the appropriate amount of tolerance without exaggerations.
- Interleaving problem: Interleaving of frames is explained in [38]. Nevertheless, we mention it briefly here, and for more detail, we refer the reader to [38]. Frame interleaving is an intratraffic-class problem. In the case that several HTS streams are using the same queue (no spatial isolation) and are having expected arrival times that are relatively close (weak temporal isolation), the order of the frames in the queue may be nondeterministic. This could result in different order from one cycle to another, which may lead to variable queuing delay and higher jitter. Frame interleaving in a switch port may lead to slot slope in the next switch. Thus, a schedule should aim to reduce the probability of frame interleaving.
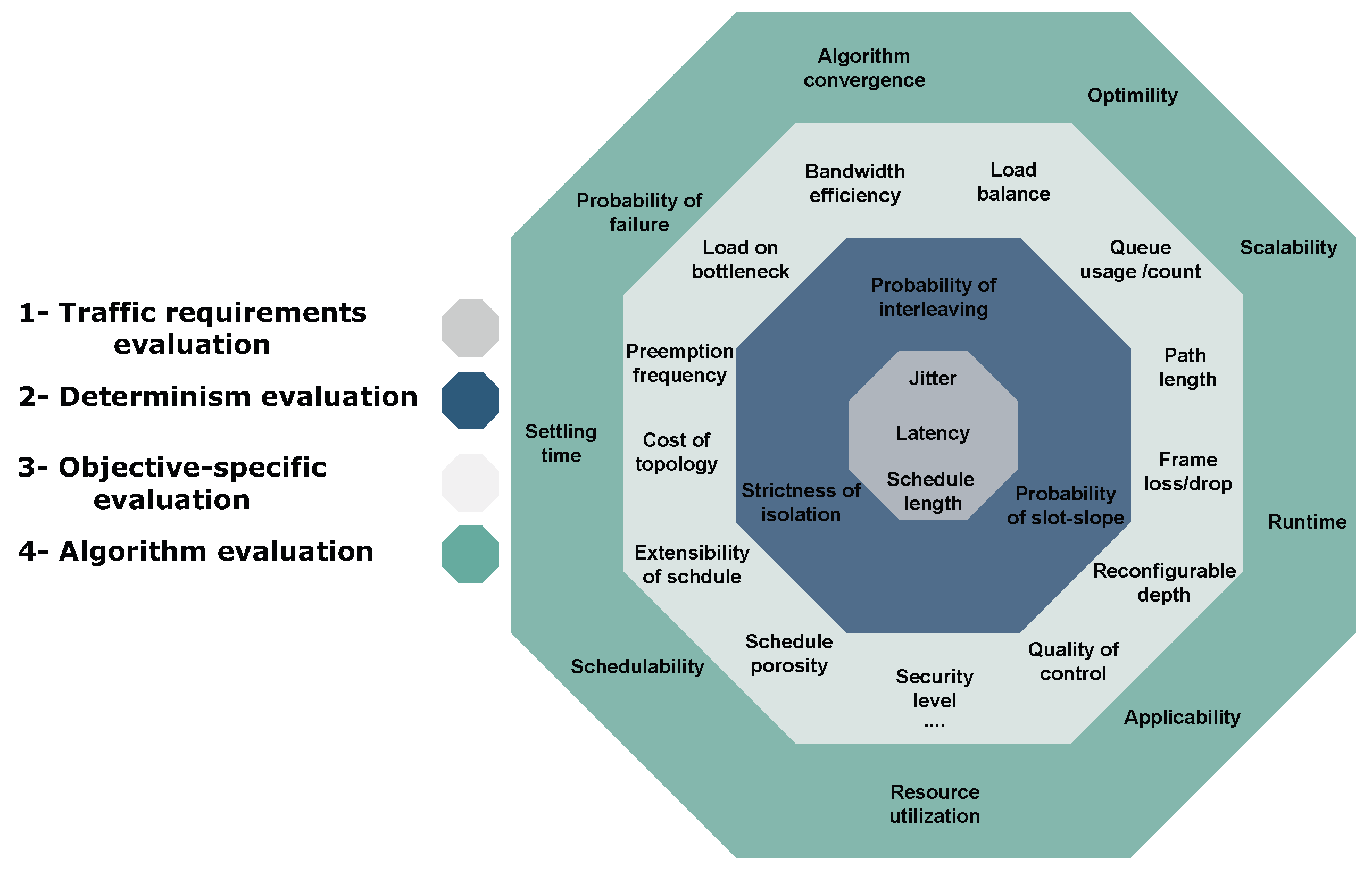
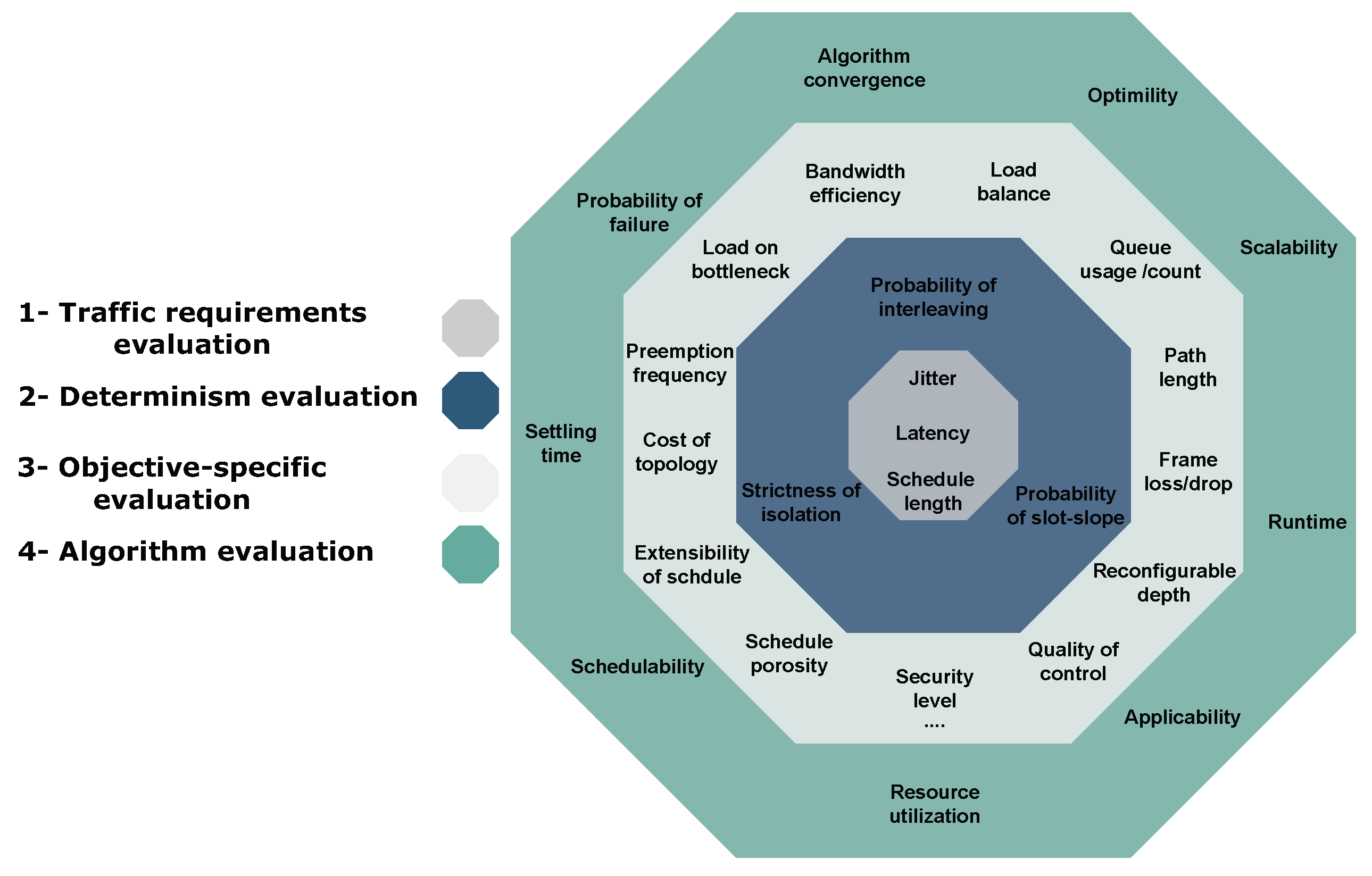
6.2. Evaluation Metrics
- The strictness of temporal and spatial isolation;
- The probability of slot slope;
- The probability of frames/streams interleaving;
- Load on the bottleneck (expressed in [88] as the number of available flows);
- Frequency of preemption [95];
- Extensibility of the schedule [12] (measures the deviation in the duration of unused spaces in the schedule);
- Porosity of the schedule [52] (measures the spacing between HTS windows to allow LTS and BE transmission);
- Security level [104];
- Reconfigurable depth( expressed in [67] as the number of successful global reconfigurations because of core failure before the reconfiguration operation is unfeasible);
- Path length [53];
- Runtime for a given problem complexity determined by the size of the topology and the number of streams to schedule [11,14,15,24,29,30,31,32,33,35,37,38,40,41,42,44,45,46,47,48,49,50,51,53,54,57,58,59,60,62,65,66,67,68,70,71,72,73,74,76,77,78,82,84,86,87,91,95,96,97,98,101,104,105,106,107,109,110,112,113,116,117,118,119,120,121,122,123,124,126];
- Scope of applicability of the algorithm based on its assumptions (e.g., algorithms with very restrictive assumptions are not applicable in the general case but for specific use cases);
- Settling time [85];
- Probability of failure per hour [102];
- Algorithm convergence [82].
7. Summary and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Summary of the Surveyed Scheduling Works

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Paper | Tasks | Approach | Mode | Model | Shaper |
|---|---|---|---|---|---|---|
| 2016 | [38] | S | SMT/OMT, Z3 | off | C | TAS |
| [37] | S | ILP, job-shop prob. | off | C | TAS | |
| [50] | S R | Dijkstra and ILP for HTS, GRASP for AVB routing | off | C | TAS | |
| [34] | S | UBS traffic-urgency-based scheduler | off | D | ATS | |
| [78] | S A | First-order logic, SMT, MIP, incremental scheduling | off | C | TAS | |
| 2017 | [58] | S R | ILP, SMT/OMT, UBS, base-period, full-network traversal | off/on | C | TAS |
| [79] | n.s | SMT-based | off | C | TAS | |
| [39] | S | Graphical modeling, model-based inference of rules and constraints, logic programming, SMT | off | C | TAS | |
| [92] | n.s | SMT/OMT | off | C | TAS | |
| [51] | S R | Multiobjective optimization, 0-1 ILP, genetic algorithm | off | C | TAS | |
| [40] | S R | ILP formulation | off | C | TAS | |
| [44] | S | Extracts flow properties, react to traffic changes, heuristic | off | C | TAS | |
| [30] | R T | GRASP metaheuristic, constraint programming, topology and routing heuristic | off | C | n.s | |
| 2018 | [14] | S R | ILP, dummy objective variable | off | C | TAS |
| [15] | R | Study the effect of routing on schedulability, ILP-based | off | C | TAS | |
| [41] | S | First-order theory of arrays, window-based, SMT/OMT | off | C | TAS | |
| [45] | S | GRASP metaheuristic | off | C | TAS | |
| [46] | S R | K-shortest path (KSP), GRASP metaheuristic | off | C | TAS | |
| [29] | S R | SMT, route subsets and time slices heuristic | off | C | TAS | |
| [47] | S R A | Genetic algorithm, task bindings | off | C | TAS | |
| [57] | S | Configuration agent, list-based heuristic for fog computing | on | C | TAS | |
| [126] | S R T | Greedy heuristic, iterative path selection, Yen’s algorithm | off | C | TAS | |
| 2019 | [62] | S | Flow fragmentation, SMT Z3 | off | C | TAS |
| [48] | S | Problem segmentation, relaxed constraints, SMT, incremental approach | off | C | TAS | |
| [42] | S | Queue assignment, SMT/OMT, fragmentation, heuristics: no-gate-closing, strict-priority, move-forward, | off | C | TAS | |
| [49] | S R | Heuristic list scheduler | off | C | TAS | |
| [103] | S | ILP, time redundancy | off | C | TAS | |
| [124] | S R | Incremental algorithms, QoS-aware path selection, SWOTS-AEAP, SWOTS-ASAP, SWTS, SWOTS-WS | on | C | TAS | |
| [104] | S R | Binary search, genetic algorithm, incremental synthesis, security optimization | off | C | TAS | |
| 2020 | [97] | S R | Base-period, periodic update of the GCL, SMT | on | C | TAS |
| [59] | S R | Load balancing, MIP, vector bin packing (VBP) | off | C | TAS | |
| [11] | S | Injection time grouping algorithm, parameter selection | off | C | TAS, CQF | |
| [123] | S | Iterative, windows-based, no traffic isolation | off | C | TAS | |
| [117] | S R | Incremental scheduling, streams partitioning, iterated ILP, degree of conflict awareness | off | C | TAS | |
| [96] | S R | MDPC, MDTC, heuristics (HB-S, HD-S), BFS | off/on | C | TAS | |
| [32] | S | Injection time planning mechanism, Tabu-ITP | off | C | CQF | |
| [61] | S | Extensibility-aware scheduling (EASA) algorithm, simulated annealing-based metaheuristic | off | C | TAS | |
| [36] | S | Suggest enhancement to TAS: protection band | off | C | TAS | |
| [118] | S | Frame check at egress queue, hardware enhancement | off | C | TAS | |
| [111] | S | SMT | off | C | TAS | |
| [109] | S R A | Constraint-programming-based, TESLA protocol | off | C | TAS | |
| [84] | S | Theory of computation: constraint and logic programming, systematic, and metaheuristic search | off | C | TAS | |
| [63] | S | Constraint programming, joint TSN and 5G scheduling | off | D | TAS | |
| [122] | S R | SMT/OMT, co-design approach (CSRST), SHLS | off | C | TAS | |
| [76] | S R | Hybrid genetic algorithm, compress schedules | off | C | TAS | |
| [98] | S R | Conflict-graph-based approach | off | C | TAS | |
| [112] | S R | Optimality gap, shortest path, ILP | off | C | TAS | |
| [69] | S R | AGRS approach, simplify topology | off/on | C | TAS | |
| [85] | S | Fixed-priority scheduling (FPS), co-design optimization | off | C | TAS |
| Year | Paper | Tasks | Approach | Mode | Model | Shaper |
|---|---|---|---|---|---|---|
| 2021 | [60] | S R | Vector bin packing(VBP), bottleneck heuristic, MML heuristic, coefficient of variation heuristic, MDP heuristic | on | C | TAS |
| [87] | S R | Concurrent multipath transmission, MMF heuristic | off | C | TAS | |
| [24] | S | Z3 SMT/OMT, OMNeT++ simulation, increased porosity | off | C | TAS | |
| [53] | S R | Ant colony optimization, binary multi-knapsack formulation, improved genetic simulated | off | C | TAS | |
| [54] | S A | SMT, application level optimization, tasks transmission | off | C | TAS | |
| [99] | n.s. | Light traffic heuristic, systematic procedure | off | C | TAS | |
| [101] | S R | FTB heuristic, vector bin packing (VBP), frame replication | on | C | TAS | |
| [35] | S | Physical queues abstraction, two stages stream-level scheme | off | C | TAS | |
| [66] | S R | Incremental algorithm (IRAS), prerouting algorithm | on | C | TAS | |
| [86] | S | CP, Tabu Search, diversification and intensification | off | C | TAS | |
| [65] | S R | Dynamic programming, ultra-fast adaptive greedy method | off/on | C | CQF | |
| [75] | R | Real-time routing scheduler (RTRS) | off | C | TAS | |
| [74] | S R | Constraint programming, logic-based decomposition | off | C | TAS | |
| [80] | S | Genetic algorithm | off | C | TAS | |
| [105] | S | Z3 SMT/OMT, design space exploration problem | off | C | TAS | |
| [102] | S | Redundant transmission, PFT-TSN, SMT | off | C | TAS | |
| [107] | S | ILP, enhanced online/offline schedulers | off/on | C | TAS | |
| [90] | S | Constraint strategy | off | C | TAS | |
| [77] | S | Low-delay message fragmentation, no-wait scheduling, OMT | off | C | TAS | |
| [93] | S | Semisupervised-learning, iterative, stream partitioning, sparse encoding | off | C | TAS | |
| [106] | S R | SMT, path redundancy, incremental synthesis heuristic | off | C | TAS | |
| [110] | S R | SMT, ASIL decomposition, binary search, incremental | off | C | TAS | |
| [88] | S R | Heuristics: greedy multicast flows routing, backtracking, incremental, as-early-as-possible, iterative local search, redundancy-based | off | C | TAS | |
| [70] | S R | Cluster-ILP, incremental scheduling, divide and conquer | off/on | C | TAS | |
| 2022 | [33] | S | Flow sequences analysis, parallel, incremental computing, FLJ-VB, divisibility theory, PD-based search boundary | off | C | CQF |
| [94] | S | Cycle model normalization, cooperative resource allocation | off | C | C(S)QF | |
| [83] | S | Machine learning, regression-based surrogate model, NSGA-II, SMPSO, multiobjective optimizations | off | C | TAS, CBS | |
| [71] | S | Partial schedules, conflicts-guided space probing, EPIC | off | C | TAS | |
| [91] | S | CP, worst-case delay analysis window-based | off | C | TAS | |
| [81] | S | Genetic algorithm | off | C | TAS | |
| [82] | S | Deep reinforcement learning, no-wait scheduling, A3C | off | C | TAS | |
| [116] | S | CP, Exclusive queue allocation, size-based isolation | off | C | TAS | |
| [68] | S | HERMES heuristic, zero or relaxed reception jitter | on | C | TAS | |
| [119] | S R A | TESLA heuristic, redundant disjunct paths, CP, Simulated Annealing, ASAP list scheduling | off | C | TAS | |
| [120] | S R | Dijkstra, SMT, single-fault, temporal exploration | off | C | TAS | |
| [72] | S R | ILP, cycle correlation, classification, adaptive cycle | off | C | TAS | |
| [121] | S R | LSSR-architecture, stream partition, graph-clustering | off | C | TAS | |
| [95] | S R | SMT-based, combine TAS with preemption | off | C | TAS | |
| [73] | S R | Routing to avoid congestion and reduce e2e latency | off | C | TAS | |
| [67] | S R A | Joint-ILP, SCA heuristic, reconfigurable depth metric | on | C | TAS | |
| [100] | S R | Reinforcement learning, JRSA heuristic | off | C | CQF |
References
- PROFINET Technology and Application–System Description. Available online: https://www.profibus.com/download/profinet-technology-and-application-system-description (accessed on 1 October 2023).
- Seol, Y.; Hyeon, D.; Min, J.; Kim, M.; Paek, J. Timely Survey of Time-Sensitive Networking: Past and Future Directions. IEEE Access. 2021, 9, 142506–142527. [Google Scholar] [CrossRef]
- Ashjaei, M.; Bello, L.L.; Daneshtalab, M.; Patti, G.; Saponara, S.; Mubeen, S. Time-Sensitive Networking in automotive embedded systems: State of the art and research opportunities. J. Syst. Archit. 2021, 117, 102137. [Google Scholar] [CrossRef]
- Nasrallah, A.; Thyagaturu, A.S.; Alharbi, Z.; Wang, C.; Shao, X.; Reisslein, M.; El Bakoury, H. Ultra-low latency (ULL) networks: The IEEE TSN and IETF DetNet standards and related 5G ULL research. IEEE Commun. Surv. Tutorials 2018, 21, 88–145. [Google Scholar] [CrossRef]
- Bello, L.L.; Steiner, W. A perspective on IEEE time-sensitive networking for industrial communication and automation systems. Proc. IEEE 2019, 107, 1094–1120. [Google Scholar] [CrossRef]
- Nasrallah, A.; Thyagaturu, A.S.; Alharbi, Z.; Wang, C.; Shao, X.; Reisslein, M. Performance Comparison of IEEE 802.1 TSN Time Aware Shaper (TAS) and Asynchronous Traffic Shaper (ATS). IEEE Access 2019, 7, 44165–44181. [Google Scholar] [CrossRef]
- Thangamuthu, S.; Concer, N.; Cuijpers, P.J.; Lukkien, J.J. Analysis of ethernet-switch traffic shapers for in-vehicle networking applications. In Proceedings of the 2015 Design, Automation & Test in Europe Conference & Exhibition, Grenoble, France, 9–13 March 2015; pp. 55–60. [Google Scholar]
- Steiner, W.; Craciunas, S.S.; Oliver, R.S. Traffic planning for time-sensitive communication. IEEE Commun. Stand. Mag. 2018, 2, 42–47. [Google Scholar] [CrossRef]
- Blake, S.; Black, D.; Carlson, M.; Davies, E.; Wang, Z.; Weiss, W. Rfc2475: An Architecture for Differentiated Service. Available online: https://datatracker.ietf.org/doc/html/rfc2475 (accessed on 13 January 2023).
- IEC/IEEE 60802 TSN Profile for Industrial Automation, D1.3 draft. Available online: https://1.ieee802.org/tsn/iec-ieee-60802 (accessed on 7 August 2021).
- Zhang, J.; Xu, Q.; Lu, X.; Zhang, Y.; Chen, C. Coordinated data transmission in Time-Sensitive Networking for Mixed Time-Sensitive Applications. In Proceedings of the IECON 2020 The 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, Singapore, 18 October 2020; pp. 3805–3810. [Google Scholar]
- IEEE Std 802.1Qbu-2016 (Amendment to IEEE Std 802.1Q-2014); IEEE Standard for Local and Metropolitan Area Networks—Bridges and Bridged Networks—Amendment 26: Frame Preemption. IEEE: Piscataway, NJ, USA, 2016; pp. 1–52. [CrossRef]
- IEEE Std 802.1Qbv-2015 (Amendment to IEEE Std 802.1Q-2014 as amended by IEEE Std 802.1Qca-2015, IEEE Std 802.1Qcd-2015, and IEEE Std 802.1Q-2014/Cor 1-2015); IEEE Standard for Local and Metropolitan Area Networks—Bridges and Bridged Networks—Amendment 25: Enhancements for Scheduled Traffic. IEEE: Piscataway, NJ, USA, 2016; pp. 1–57. [CrossRef]
- Falk, J.; Dürr, F.; Rothermel, K. Exploring practical limitations of joint routing and scheduling for TSN with ILP. In Proceedings of the 2018 IEEE 24th International Conference on Embedded and Real-Time Computing Systems and Applications (RTCSA), Hakodate, Japan, 28–31 August 2018; pp. 136–146. [Google Scholar]
- Nayak, N.G.; Duerr, F.; Rothermel, K. Routing algorithms for IEEE802. 1Qbv networks. ACM SIGBED Rev. 2018, 15, 13–18. [Google Scholar] [CrossRef]
- Zhao, L.; Pop, P.; Craciunas, S.S. Worst-case latency analysis for IEEE 802.1 Qbv time sensitive networks using network calculus. IEEE Access 2018, 6, 41803–41815. [Google Scholar] [CrossRef]
- Zhao, L.; Pop, P.; Gong, Z.; Fang, B. Improving Latency Analysis for Flexible Window-Based GCL Scheduling in TSN Networks by Integration of Consecutive Nodes Offsets. IEEE Internet Things J. 2020, 8, 5574–5584. [Google Scholar] [CrossRef]
- IEEE Std 802.1Q-2018 (Revision of IEEE Std 802.1Q-2014); IEEE Standard for Local and Metropolitan Area Network–Bridges and Bridged Networks. IEEE: Piscataway, NJ, USA, 2018; pp. 1–1993. [CrossRef]
- IEEE Std 802.1Qav-2009 (Amendment to IEEE Std 802.1Q-2005); IEEE Standard for Local and Metropolitan Area Networks—Virtual Bridged Local Area Networks Amendment 12: Forwarding and Queuing Enhancements for Time-Sensitive Streams. IEEE: Piscataway, NJ, USA, 2010; pp. C1–C72. [CrossRef]
- IEEE Std 802.1Qcr-2020 (Amendment to IEEE Std 802.1Q-2018 as amended by IEEE Std 802.1Qcp-2018, IEEE Std 802.1Qcc-2018, IEEE Std 802.1Qcy-2019, and IEEE Std 802.1Qcx-2020); IEEE Standard for Local and Metropolitan Area Networks–Bridges and Bridged Networks—Amendment 34: Asynchronous Traffic Shaping. IEEE: Piscataway, NJ, USA, 2020; pp. 1–151. [CrossRef]
- IEEE 802.1Qch-2017 (Amendment to IEEE Std 802.1Q-2014 as amended by IEEE Std 802.1Qca-2015, IEEE Std 802.1Qcd(TM)-2015, IEEE Std 802.1Q-2014/Cor 1-2015, IEEE Std 802.1Qbv-2015, IEEE Std 802.1Qbu-2016, IEEE Std 802.1Qbz-2016, and IEEE Std 802.1Qci-2017); IEEE Standard for Local and Metropolitan Area Networks–Bridges and Bridged Networks–Amendment 29: Cyclic Queuing and Forwarding. IEEE: Piscataway, NJ, USA, 2017; pp. 1–30. [CrossRef]
- Kim, M.; Hyeon, D.; Paek, J. eTAS: Enhanced Time-Aware Shaper for Supporting Non-Isochronous Emergency Traffic in Time-Sensitive Networks. IEEE Internet Things J. 2021, 9, 21860262. [Google Scholar] [CrossRef]
- Tindell, K.W.; Burns, A.; Wellings, A.J. Allocating hard real-time tasks: An NP-hard problem made easy. Real-Time Syst. 1992, 4, 145–165. [Google Scholar] [CrossRef]
- Houtan, B.; Ashjaei, M.; Daneshtalab, M.; Sjödin, M.; Mubeen, S. Synthesising schedules to improve QoS of best-effort traffic in TSN networks. In Proceedings of the 29th International Conference on Real-Time Networks and Systems, Virtual, 7–9 April 2021; pp. 68–77. [Google Scholar]
- Houtan, B.; Ashjaei, M.; Daneshtalab, M.; Sjödin, M.; Afshar, S.; Mubeen, S. Schedulability Analysis of Best-Effort Traffic in TSN Networks. In Proceedings of the 2021 26th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Vasteras, Sweden, 7–10 September 2021; pp. 1–8. [Google Scholar]
- Zhao, L.; Pop, P.; Steinhorst, S. Quantitative performance comparison of various traffic shapers in time-sensitive networking. arXiv 2021, arXiv:2103.13424. [Google Scholar] [CrossRef]
- Pruski, A.; Ojewale, M.A.; Gavrilut, V.; Yomsi, P.M.; Berger, M.S.; Almeida, L. Implementation Cost Comparison of TSN Traffic Control Mechanisms. In Proceedings of the 2021 26th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Vasteras, Sweden, 7–10 September 2021; pp. 1–8. [Google Scholar]
- Kohler, T.; Dürr, F.; Rothermel, K. Consistent network management for software-defined networking based multicast. IEEE Trans. Netw. Serv. Manag. 2016, 13, 447–461. [Google Scholar] [CrossRef]
- Mahfouzi, R.; Aminifar, A.; Samii, S.; Rezine, A.; Eles, P.; Peng, Z. Stability-aware integrated routing and scheduling for control applications in Ethernet networks. In Proceedings of the 2018 Design, Automation & Test in Europe Conference & Exhibition, Dresden, Germany, 19–23 March 2018; pp. 682–687. [Google Scholar]
- Gavrilut, V.; Zarrin, B.; Pop, P.; Samii, S. Fault-tolerant topology and routing synthesis for IEEE time-sensitive networking. In Proceedings of the 25th International Conference on Real-Time Networks and Systems 2017, Grenoble, France, 4–6 October 2017; pp. 267–276. [Google Scholar]
- Lin, Y.; Jin, X.; Zhang, T.; Han, M.; Guan, N.; Deng, Q. Queue assignment for fixed-priority real-time flows in time-sensitive networks: Hardness and algorithm. J. Syst. Archit. 2021, 116, 102141. [Google Scholar] [CrossRef]
- Yan, J.; Quan, W.; Jiang, X.; Sun, Z. Injection time planning: Making cqf practical in time-sensitive networking. In Proceedings of the IEEE INFOCOM 2020-IEEE Conference on Computer Communications, Toronto, ON, Canada, 6–9 July 2020; pp. 616–625. [Google Scholar]
- Zhang, Y.; Xu, Q.; Xu, L.; Chen, C.; Guan, X. Efficient Flow Scheduling for Industrial Time-Sensitive Networking: A Divisibility Theory Based Method. IEEE Trans. Ind. Inform. 2022, 18, 22136129. [Google Scholar] [CrossRef]
- Specht, J.; Samii, S. Urgency-based scheduler for time-sensitive switched ethernet networks. In Proceedings of the 2016 28th Euromicro Conference on Real-Time Systems (ECRTS), Toulouse, France, 5–8 July 2016; pp. 75–85. [Google Scholar]
- Xue, J.; Shou, G.; Liu, Y.; Hu, Y.; Guo, Z. Time-Aware Traffic Scheduling with Virtual Queues in Time-Sensitive Networking. In Proceedings of the 2021 IFIP/IEEE International Symposium on Integrated Network Management (IM), Bordeaux, France, 17–21 May 2021; pp. 604–607. [Google Scholar]
- Kim, M.; Min, J.; Hyeon, D.; Paek, J. TAS scheduling for real-time forwarding of emergency event traffic in TSN. In Proceedings of the 2020 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Republic of Korea, 21–23 October 2020; pp. 1111–1113. [Google Scholar]
- Dürr, F.; Nayak, N.G. No-wait packet scheduling for IEEE time-sensitive networks (TSN). In Proceedings of the 24th International Conference on Real-Time Networks and Systems, Brest, France, 19–21 October 2016; pp. 203–212. [Google Scholar]
- Craciunas, S.S.; Oliver, R.S.; Chmelík, M.; Steiner, W. Scheduling real-time communication in IEEE 802.1 Qbv time sensitive networks. In Proceedings of the 24th International Conference on Real-Time Networks and Systems, Brest, France, 19–21 October 2016; pp. 183–192. [Google Scholar]
- Farzaneh, M.H.; Kugele, S.; Knoll, A. A graphical modeling tool supporting automated schedule synthesis for time-sensitive networking. In Proceedings of the 2017 22nd IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Limassol, Cyprus, 12–15 September 2017; pp. 1–8. [Google Scholar]
- Schweissguth, E.; Danielis, P.; Timmermann, D.; Parzyjegla, H.; Mühl, G. ILP-based joint routing and scheduling for time-triggered networks. In Proceedings of the 25th International Conference on Real-Time Networks and Systems 2017, Grenoble, France, 4–6 October 2017; pp. 8–17. [Google Scholar]
- Oliver, R.S.; Craciunas, S.S.; Steiner, W. IEEE 802.1 Qbv gate control list synthesis using array theory encoding. In Proceedings of the 2018 IEEE Real-Time and Embedded Technology and Applications Symposium (RTAS), Porto, Portugal, 11–13 April 2018; pp. 13–24. [Google Scholar]
- Jin, X.; Xia, C.; Guan, N.; Xu, C.; Li, D.; Yin, Y.; Zeng, P. Real-time scheduling of massive data in time sensitive networks with a limited number of schedule entries. IEEE Access 2020, 8, 6751–6767. [Google Scholar] [CrossRef]
- Hellmanns, D.; Haug, L.; Hildebr, M.; Dürr, F.; Kehrer, S.; Hummen, R. How to optimize joint routing and scheduling models for TSN using integer linear programming. In Proceedings of the 29th International Conference on Real-Time Networks and Systems 2021, Virtual, 7–9 April 2021; pp. 100–111. [Google Scholar]
- Raagaard, M.L.; Pop, P.; Gutiérrez, M.; Steiner, W. Runtime reconfiguration of time-sensitive networking (TSN) schedules for fog computing. In Proceedings of the 2017 IEEE Fog World Congress (FWC), Santa Clara, CA, USA, 30 October–1 November 2017; pp. 1–6. [Google Scholar]
- Gavriluţ, V.; Pop, P. Scheduling in time sensitive networks (TSN) for mixed-criticality industrial applications. In Proceedings of the 2018 14th IEEE International Workshop on Factory Communication Systems (WFCS), Imperia, Italy, 13–15 June 2018; pp. 1–4. [Google Scholar]
- Gavriluţ, V.; Zhao, L.; Raagaard, M.L.; Pop, P. AVB-aware routing and scheduling of time-triggered traffic for TSN. IEEE Access 2018, 6, 75229–75243. [Google Scholar] [CrossRef]
- Pahlevan, M.; Obermaisser, R. Genetic algorithm for scheduling time-triggered traffic in time-sensitive networks. In Proceedings of the 2018 IEEE 23rd International Conference on Emerging Technologies and Factory Automation (ETFA), Turin, Italy, 4–7 September 2018; pp. 337–344. [Google Scholar]
- Pozo, F.; Rodriguez-Navas, G.; Hansson, H. Methods for large-scale time-triggered network scheduling. Electronics 2019, 8, 738. [Google Scholar] [CrossRef]
- Pahlevan, M.; Tabassam, N.; Obermaisser, R. Heuristic list scheduler for time triggered traffic in time sensitive networks. ACM Sigbed Rev. 2019, 16, 15–20. [Google Scholar] [CrossRef]
- Pop, P.; Raagaard, M.L.; Craciunas, S.S.; Steiner, W. Design optimisation of cyber-physical distributed systems using IEEE time-sensitive networks. IET Cyber-Phys. Syst. Theory Appl. 2016, 1, 86–94. [Google Scholar] [CrossRef]
- Smirnov, F.; Glaß, M.; Reimann, F.; Teich, J. Optimizing message routing and scheduling in automotive mixed-criticality time-triggered networks. In Proceedings of the 2017 54th ACM/EDAC/IEEE Design Automation Conference (DAC), Austin, TX, USA, 18–22 June 2017; pp. 1–6. [Google Scholar]
- Steiner, W. Synthesis of static communication schedules for mixed-criticality systems. In Proceedings of the 2011 14th IEEE International Symposium on Object/Component/Service-Oriented Real-Time Distributed Computing Workshops, Newport Beach, CA, USA, 28–31 March 2011; pp. 11–18. [Google Scholar]
- Wang, Y.; Chen, J.; Ning, W.; Yu, H.; Lin, S.; Wang, Z.; Pang, G.; Chen, C. A time-sensitive network scheduling algorithm based on improved ant colony optimization. Alex. Eng. J. 2021, 60, 107–114. [Google Scholar] [CrossRef]
- Feng, T.; Yang, H. SMT-based Task-and Network-level Static Schedule for Time Sensitive Network. In Proceedings of the 2021 International Conference on Communications, Information System and Computer Engineering (CISCE), Beijing, China, 14–16 May 2021; pp. 764–770. [Google Scholar]
- Craciunas, S.S.; Oliver, R.S. SMT-based task-and network-level static schedule generation for time-triggered networked systems. In Proceedings of the 22nd International Conference on Real-Time Networks and Systems 2014, Versailles, France, 8–10 October 2014; pp. 45–54. [Google Scholar]
- Craciunas, S.S.; Oliver, R.S.; Ecker, V. Optimal static scheduling of real-time tasks on distributed time-triggered networked systems. In Proceedings of the 2014 IEEE Emerging Technology and Factory Automation (ETFA) 2014, Barcelona, Spain, 16–19 September 2014; pp. 1–8. [Google Scholar]
- Pop, P.; Raagaard, M.L.; Gutierrez, M.; Steiner, W. Enabling fog computing for industrial automation through time-sensitive networking (TSN). IEEE Commun. Stand. Mag. 2018, 2, 55–61. [Google Scholar] [CrossRef]
- Nayak, N.G.; Dürr, F.; Rothermel, K. Incremental flow scheduling and routing in time-sensitive software-defined networks. IEEE Trans. Ind. Inform. 2017, 14, 2066–2075. [Google Scholar] [CrossRef]
- Syed, A.A.; Ayaz, S.; Leinmüller, T.; Chra, M. MIP-based Joint Scheduling and Routing with Load Balancing for TSN based In-vehicle Networks. In Proceedings of the 2020 IEEE Vehicular Networking Conference (VNC), New York, NY, USA, 16–18 December 2020; pp. 1–7. [Google Scholar]
- Syed, A.A.; Ayaz, S.; Leinmüller, T.; Chandra, M. Dynamic Scheduling and Routing for TSN based In-vehicle Networks. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar]
- Barzegaran, M.; Karagiannis, V.; Avasalcai, C.; Pop, P.; Schulte, S.; Dustdar, S. Towards extensibility-aware scheduling of industrial applications on fog nodes. In Proceedings of the 4th IEEE International Conference on Edge Computing, Melbourne, VIC, Australia, 11–14 May 2020; pp. 1–9. [Google Scholar]
- Dos Santos, A.C.; Schneider, B.; Nigam, V. TSNSCHED: Automated schedule generation for time sensitive networking. In Proceedings of the 2019 Formal Methods in Computer Aided Design (FMCAD), San Jose, CA, USA, 22–25 October 2019; pp. 69–77. [Google Scholar]
- Ginthör, D.; Guillaume, R.; von Hoyningen-Huene, J.; Schüngel, M.; Schotten, H.D. End-to-end optimized joint scheduling of converged wireless and wired time-sensitive networks. In Proceedings of the 2020 25th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Vienna, Austria, 8–11 September 2020; Volume 1, pp. 222–229. [Google Scholar]
- Pozo, F.; Rodriguez-Navas, G.; Hansson, H. Schedule reparability: Enhancing time-triggered network recovery upon link failures. In Proceedings of the 2018 IEEE 24th International Conference on Embedded and Real-Time Computing Systems and Applications (RTCSA), Hakodate, Japan, 28–31 August 2018; pp. 147–156. [Google Scholar]
- Krolikowski, J.; Martin, S.; Medagliani, P.; Leguay, J.; Chen, S.; Chang, X.; Geng, X. Joint routing and scheduling for large-scale deterministic IP networks. Comput. Commun. 2021, 165, 33–42. [Google Scholar] [CrossRef]
- Huang, Y.; Wang, S.; Huang, T.; Wu, B.; Wu, Y.; Liu, Y. Online Routing and Scheduling for Time-Sensitive Networks. In Proceedings of the 2021 IEEE 41st International Conference on Distributed Computing Systems (ICDCS), Washington, DC, USA, 7–10 July 2021; pp. 272–281. [Google Scholar]
- Li, J.; Xiong, H.; Li, Q.; Xiong, F.; Feng, J. Run-Time Reconfiguration Strategy and Implementation of Time-Triggered Networks. Electronics 2022, 11, 1477. [Google Scholar] [CrossRef]
- Bujosa, D.; Ashjaei, M.; Papadopoulos, A.V.; Nolte, T.; Proenza, J. HERMES: Heuristic Multi-queue Scheduler for TSN Time-Triggered Traffic with Zero Reception Jitter Capabilities. In Proceedings of the 30th International Conference on Real-Time Networks and Systems, Paris, France, 7–8 June 2022; pp. 70–80. [Google Scholar]
- Yu, Q.; Gu, M. Adaptive group routing and scheduling in multicast time-sensitive networks. IEEE Access 2020, 8, 37855–37865. [Google Scholar] [CrossRef]
- Li, C.; Zhang, C.; Zheng, W.; Wen, X.; Lu, Z.; Zhao, J. Joint Routing and Scheduling for Dynamic Applications in Multicast Time-Sensitive Networks. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar]
- Vlk, M.; Brejchová, K.; Hanzálek, Z.; Tang, S. Large-scale periodic scheduling in time-sensitive networks. Comput. Oper. Res. 2022, 137, 105512. [Google Scholar] [CrossRef]
- Nie, H.; Li, S.; Liu, Y. An Enhanced Routing and Scheduling Mechanism for Time-Triggered Traffic with Large Period Differences in Time-Sensitive Networking. Appl. Sci. 2022, 12, 4448. [Google Scholar] [CrossRef]
- Li, Y.; Jiang, J.; Hong, S.H. Joint Traffic Routing and Scheduling Algorithm Eliminating the Nondeterministic Interruption for TSN Networks Used in IIoT. IEEE Internet Things J. 2022, 9, 18663–18680. [Google Scholar] [CrossRef]
- Vlk, M.; Hanzálek, Z.; Tang, S. Constraint programming approaches to joint routing and scheduling in time-sensitive networks. Comput. Ind. Eng. 2021, 157, 107317. [Google Scholar] [CrossRef]
- Chang, S.H.; Chen, H.; Cheng, B.C. Time-predictable routing algorithm for Time-Sensitive Networking: Schedulable guarantee of Time-Triggered streams. Comput. Commun. 2021, 172, 183–195. [Google Scholar] [CrossRef]
- Arestova, A.; Hielscher, K.S.; German, R. Design of a hybrid genetic algorithm for time-sensitive networking. In Proceedings of the International Conference on Measurement, Modelling and Evaluation of Computing Systems 2020, Saarbrucken, Germany, 16–18 March 2020; pp. 99–117. [Google Scholar]
- Jin, X.; Xia, C.; Guan, N.; Zeng, P. Joint algorithm of message fragmentation and no-wait scheduling for time-sensitive networks. IEEE/CAA J. Autom. Sin. 2021, 8, 478–490. [Google Scholar] [CrossRef]
- Craciunas, S.S.; Oliver, R.S. Combined task-and network-level scheduling for distributed time-triggered systems. Real-Time Syst. 2016, 52, 161–200. [Google Scholar] [CrossRef]
- Craciunas, S.S.; Oliver, R.S.; Steiner, W. Formal scheduling constraints for time-sensitive networks. arXiv 2017, arXiv:1712.02246. [Google Scholar]
- Kim, H.J.; Lee, K.C.; Lee, S. A Genetic Algorithm based Scheduling Method for Automotive Ethernet. In Proceedings of the IECON 2021—47th Annual Conference of the IEEE Industrial Electronics Society, Toronto, ON, Canada, 13–16 October 2021; pp. 1–5. [Google Scholar]
- Kim, H.J.; Lee, K.C.; Kim, M.H.; Lee, S. Optimal Scheduling of Time-Sensitive Networks for Automotive Ethernet Based on Genetic Algorithm. Electronics 2022, 11, 926. [Google Scholar] [CrossRef]
- Wang, X.; Yao, H.; Mai, T.; Nie, T.; Zhu, L.; Liu, Y. Deep reinforcement learning aided no-wait flow scheduling in time-sensitive networks. In Proceedings of the 2022 IEEE Wireless Communications and Networking Conference (WCNC), Austin, TX, USA, 10–13 April 2022; pp. 812–817. [Google Scholar]
- Bezerra, D.; de Oliveira Filho, A.T.; Rodrigues, I.R.; Dantas, M.; Barbosa, G.; Souza, R.; Kelner, J.; Sadok, D. A machine learning-based optimization for end-to-end latency in TSN networks. Comput. Commun. 2022, 195, 424–440. [Google Scholar] [CrossRef]
- Barzegaran, M.; Zarrin, B.; Pop, P. Quality-of-control-aware scheduling of communication in TSN-based fog computing platforms using constraint programming. In Proceedings of the 2nd Workshop on Fog Computing and the IoT (Fog-IoT 2020), Sydney, Australia, 21 April 2020. [Google Scholar]
- Dai, X.; Zhao, S.; Jiang, Y.; Jiao, X.; Hu, X.S.; Chang, W. Fixed-priority scheduling and controller co-design for time-sensitive networks. In Proceedings of the 39th International Conference on Computer-Aided Design 2020, Virtual, 2–5 November 2020; pp. 1–9. [Google Scholar]
- Barzegaran, M.; Pop, P. Communication scheduling for control performance in TSN-based fog computing platforms. IEEE Access 2021, 9, 50782–50797. [Google Scholar] [CrossRef]
- Zheng, Y.; Wang, S.; Yin, S.; Wu, B.; Liu, Y. Mix-Flow Scheduling for Concurrent Multipath Transmission in Time-Sensitive Networking. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar]
- Li, H.; Cheng, H.; Yang, L. Reliable Routing and Scheduling in Time-Sensitive Networks. In Proceedings of the 2021 17th International Conference on Mobility, Sensing and Networking (MSN), Exeter, UK, 13–15 December 2021; pp. 806–811. [Google Scholar]
- Chahed, H.; Kassler, A.J. Software-Defined time-sensitive Networks Configuration and Management. In Proceedings of the 2021 IEEE Conference on Network Function Virtualization and Software Defined Networks (NFV-SDN), Heraklion, Greece, 9–11 November 2021; pp. 124–128. [Google Scholar]
- Dai, J.; Wang, Z.; Zhong, L. Research on Gating Scheduling of Time Sensitive Network Based on Constraint Strategy. J. Phys. Conf. Ser. 2021, 1920, 012089. [Google Scholar] [CrossRef]
- Barzegaran, M.; Reusch, N.; Zhao, L.; Craciunas, S.S.; Pop, P. Real-Time Traffic Guarantees in Heterogeneous Time-sensitive Networks. In Proceedings of the 30th International Conference on Real-Time Networks and Systems 2022, Paris, France, 7–8 June 2022; pp. 46–57. [Google Scholar]
- Craciunas, S.S.; Oliver, R.S.; Ag, T. An overview of scheduling mechanisms for time-sensitive networks. Proc. Real-Time Summer Sch. ETR 2017, 2017, 1551–3203. [Google Scholar]
- Tu, J.; Xu, Q.; Xu, L.; Chen, C. SSL-SP: A Semi-Supervised-Learning-Based Stream Partitioning Method for Scale Iterated Scheduling in Time-Sensitive Networks. In Proceedings of the 2021 22nd IEEE International Conference on Industrial Technology (ICIT), Valencia, Spain, 10–12 March 2021; pp. 1182–1187. [Google Scholar]
- Huang, Y.; Wang, S.; Huang, T.; Liu, Y. Cycle-based time-sensitive and deterministic networks: Architecture, challenges, and open issues. IEEE Commun. Mag. 2022, 60, 81–87. [Google Scholar] [CrossRef]
- Zhou, Y.; Samii, S.; Eles, P.; Peng, Z. Time-Triggered Scheduling for Time-Sensitive Networking with Preemption. In Proceedings of the 2022 27th Asia and South Pacific Design Automation Conference (ASP-DAC), Taipei, Taiwan, 17–20 January 2022; pp. 262–267. [Google Scholar]
- Yu, Q.; Wan, H.; Zhao, X.; Gao, Y.; Gu, M. Online scheduling for dynamic VM migration in multicast time-sensitive networks. IEEE Trans. Ind. Inform. 2019, 16, 3778–3788. [Google Scholar] [CrossRef]
- Li, Q.; Li, D.; Jin, X.; Wang, Q.; Zeng, P. A simple and efficient time-sensitive networking traffic scheduling method for industrial scenarios. Electronics 2020, 9, 2131. [Google Scholar] [CrossRef]
- Falk, J.; Dürr, F.; Rothermel, K. Time-triggered traffic planning for data networks with conflict graphs. In Proceedings of the 2020 IEEE Real-Time and Embedded Technology and Applications Symposium (RTAS), Sydney, Australia, 21–24 April 2020; pp. 124–136. [Google Scholar]
- Kim, H.J.; Choi, M.H.; Kim, M.H.; Lee, S. Development of an Ethernet-Based Heuristic Time-Sensitive Networking Scheduling Algorithm for Real-Time In-Vehicle Data Transmission. Electronics 2021, 10, 157. [Google Scholar] [CrossRef]
- Liu, Y.; Cheng, Z.; Ren, J.; Yang, D. Joint Routing and Scheduling for CQF. In Proceedings of the 2022 7th International Conference on Computer and Communication Systems (ICCCS), Wuhan, China, 22–25 April 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Syed, A.A.; Ayaz, S.; Leinmüller, T.; Chra, M. Fault-Tolerant Dynamic Scheduling and Routing for TSN based In-vehicle Networks. In Proceedings of the 2021 IEEE Vehicular Networking Conference (VNC), Ulm, Germany, 10–12 November 2021; pp. 72–75. [Google Scholar]
- Feng, Z.; Cai, M.; Deng, Q. An efficient pro-active fault-tolerance scheduling of ieee 802.1 qbv time-sensitive network. IEEE Internet Things J. 2021, 9, 14501–14510. [Google Scholar] [CrossRef]
- Dobrin, R.; Desai, N.; Punnekkat, S. On fault-tolerant scheduling of time sensitive networks. In Proceedings of the 4th International Workshop on Security and Dependability of Critical Embedded Real-Time Systems (CERTS 2019), Stuttgart, Germany, 9 July 2019. [Google Scholar]
- Mahfouzi, R.; Aminifar, A.; Samii, S.; Eles, P.; Peng, Z. Security-aware routing and scheduling for control applications on Ethernet TSN networks. ACM Trans. Des. Autom. Electron. Systems (TODAES) 2019, 25, 1–26. [Google Scholar] [CrossRef]
- Craciunas, S.S.; Oliver, R.S. Out-of-sync Schedule Robustness for Time-sensitive Networks. In Proceedings of the 2021 17th IEEE International Conference on Factory Communication Systems (WFCS), Linz, Austria, 9–11 June 2021; pp. 75–82. [Google Scholar]
- Zhou, Y.; Samii, S.; Eles, P.; Peng, Z. Reliability-aware scheduling and routing for messages in time-sensitive networking. ACM Trans. Embed. Comput. Syst. TECS 2021, 20, 1–24. [Google Scholar] [CrossRef]
- Pang, Z.; Huang, X.; Li, Z.; Zhang, S.; Xu, Y.; Wan, H.; Zhao, X. Flow scheduling for conflict-free network updates in time-sensitive software-defined networks. IEEE Trans. Ind. Inform. 2020, 17, 1668–1678. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, J.; Liu, M.; Tan, A. TSN-based routing and scheduling scheme for Industrial Internet of Things in underground mining. Eng. Appl. Artif. Intell. 2022, 115, 105314. [Google Scholar] [CrossRef]
- Reusch, N.; Pop, P.; Craciunas, S.S. Work-in-progress: Safe and secure configuration synthesis for TSN using constraint programming. In Proceedings of the 2020 IEEE Real-Time Systems Symposium (RTSS), Houston, TX, USA, 1–4 December 2020; pp. 387–390. [Google Scholar]
- Zhou, Y.; Samii, S.; Eles, P.; Peng, Z. ASIL-decomposition based routing and scheduling in safety-critical time-sensitive networking. In Proceedings of the 2021 IEEE 27th Real-Time and Embedded Technology and Applications Symposium (RTAS), Nashville, TN, USA, 18–21 May 2021; pp. 184–195. [Google Scholar]
- Zhou, W.; Li, Z. Implementation and Evaluation of SMT-based Real-time Communication Scheduling for IEEE 802.1 Qbv in Next-generation in-vehicle network. In Proceedings of the 2020 2nd International Conference on Information Technology and Computer Application (ITCA), Guangzhou, China, 18–20 December 2020; pp. 457–461. [Google Scholar]
- Schweissguth, E.; Timmermann, D.; Parzyjegla, H.; Danielis, P.; Mühl, G. ILP-based routing and scheduling of multicast realtime traffic in time-sensitive networks. In Proceedings of the 2020 IEEE 26th International Conference on Embedded and Real-Time Computing Systems and Applications (RTCSA), Gangnueng, Republic of Korea, 19–21 August 2020; pp. 1–11. [Google Scholar]
- Berisa, A.; Zhao, L.; Craciunas, S.S.; Ashjaei, M.; Mubeen, S.; Daneshtalab, M.; Sjödin, M. AVB-aware Routing and Scheduling for Critical Traffic in Time-sensitive Networks with Preemption. In Proceedings of the 30th International Conference on Real-Time Networks and Systems 2022, Paris, France, 7–8 June 2022; pp. 207–218. [Google Scholar]
- 5G Alliance for Connected Industries and Automation (5g-ACIA). Integration of 5G with Time-Sensitive Networking for Industrial Communications (White Paper). Available online: https://5g-acia.org/whitepapers/integration-of-5g-with-time-sensitive-networking-for-industrial-communications/ (accessed on 22 November 2022).
- Seijo, O.; Iturbe, X.; Val, I. Tackling the Challenges of the Integration of Wired and Wireless TSN with a Technology Proof-of-Concept. IEEE Trans. Ind. Inform. 2021, 18, 7361–7372. [Google Scholar] [CrossRef]
- Chaine, P.J.; Boyer, M.; Pagetti, C.; Wartel, F. Egress-TT Configurations for TSN Networks. In Proceedings of the 30th International Conference on Real-Time Networks and Systems 2022, Paris, France, 7–8 June 2022; pp. 58–69. [Google Scholar]
- Atallah, A.A.; Hamad, G.B.; Mohamed, O.A. Routing and scheduling of time-triggered traffic in time-sensitive networks. IEEE Trans. Ind. Inform. 2019, 16, 4525–4534. [Google Scholar] [CrossRef]
- Vlk, M.; Hanzálek, Z.; Brejchová, K.; Tang, S.; Bhattacharjee, S.; Fu, S. Enhancing schedulability and throughput of time-triggered traffic in IEEE 802.1 Qbv time-sensitive networks. IEEE Trans. Commun. 2020, 68, 7023–7038. [Google Scholar] [CrossRef]
- Reusch, N.; Craciunas, S.S.; Pop, P. Dependability-aware routing and scheduling for Time-Sensitive Networking. IET Cyber-Phys. Syst. Theory Appl. 2022, 7, 124–146. [Google Scholar] [CrossRef]
- Feng, Z.; Deng, Q.; Cai, M.; Li, J. Efficient Reservation-based Fault-Tolerant Scheduling for IEEE 802.1 Qbv Time-Sensitive Networking. J. Syst. Archit. 2022, 123, 102381. [Google Scholar] [CrossRef]
- Xu, L.; Xu, Q.; Tu, J.; Zhang, J.; Zhang, Y.; Chen, C.; Guan, X. Learning-based Scalable Scheduling and Routing Co-design with Stream Similarity Partitioning for Time Sensitive Networking. IEEE Internet Things J. 2022, 9, 13353–13363. [Google Scholar] [CrossRef]
- Xu, L.; Xu, Q.; Zhang, Y.; Zhang, J.; Chen, C. Co-design approach of scheduling and routing in time sensitive networking. In Proceedings of the 2020 IEEE Conference on Industrial Cyberphysical Systems (ICPS), Tampere, Finland, 9–12 June 2020; Volume 1, pp. 111–116. [Google Scholar]
- Reusch, N.; Zhao, L.; Craciunas, S.S.; Pop, P. Window-based schedule synthesis for industrial IEEE 802.1 Qbv TSN networks. In Proceedings of the 2020 16th IEEE International Conference on Factory Communication Systems (WFCS), Porto, Portugal, 27–29 April 2020; pp. 1–4. [Google Scholar]
- Alnajim, A.; Salehi, S.; Shen, C.C. Incremental path-selection and scheduling for time-sensitive networks. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- IEEE Std 802.1Qcc-2018 (Amendment to IEEE Std 802.1Q-2018 as amended by IEEE Std 802.1Qcp-2018); IEEE Standard for Local and Metropolitan Area Networks–Bridges and Bridged Networks—Amendment 31: Stream Reservation Protocol (SRP) Enhancements and Performance Improvements. IEEE: Piscataway, NJ, USA, 2018; pp. 1–208. [CrossRef]
- Atallah, A.A.; Hamad, G.B.; Mohamed, O.A. Fault-resilient topology planning and traffic configuration for IEEE 802.1 Qbv TSN networks. In Proceedings of the 2018 IEEE 24th International Symposium on On-Line Testing And Robust System Design (IOLTS), Platja d’Aro, Spain, 2–4 July 2018; pp. 151–156. [Google Scholar]
- IEEE Std 802.1AS-2020 (Revision of IEEE Std 802.1AS-2011); IEEE Standard for Local and Metropolitan Area Networks–Timing and Synchronization for Time-Sensitive Applications. IEEE: Piscataway, NJ, USA, 2020; pp. 1–421. [CrossRef]
- Cavalcanti, D.; Bush, S.; Illouz, M.; Kronauer, G.; Regev, A.; Venkatesan, G. Wireless TSN–Definitions, Use Cases & Standards Roadmap. Avnu Alliance 2020, 1–6. [Google Scholar] [CrossRef]
- IEEE Std 802.1CB-2017; IEEE Standard for Local and metropolitan area networks–Frame Replication and Elimination for Reliability. IEEE: Piscataway, NJ, USA, 2017; pp. 1–102. [CrossRef]

| Topics | [2] | [4] | [5] | [8] | [7] | [6] | [3] |
|---|---|---|---|---|---|---|---|
| Basic concepts | ✓ | ✓ | |||||
| TSN core functions | ✓ | ✓ | ✓ | ||||
| Forwarding management | ✓ | ✓ | |||||
| Application fields | ✓ | ✓ | ✓ | ✓ | |||
| Coordinating technologies | ✓ | ||||||
| Tools and projects | ✓ | ||||||
| Shaping and scheduling | ✓ |
| Traffic Category | Traffic Characteristic | Traffic Type | ||
|---|---|---|---|---|
| Regularity | Timeliness | Delivery | ||
| Time-Aware Stream (HTS) | Cyclic | Deadline | Isochronous | |
| Latency | Cyclic Synchronous | |||
| Stream (LTS) | Cyclic | Latency | Cyclic Asynchronous | |
| Traffic-Engineered nonstream (LTS) | Optional | Latency | Network Control | |
| Acyclic | Alarms and Events | |||
| Configuration and Diagnostics | ||||
| Nonstream (BE) | Acyclic | N/A | Best-Effort | |
| Traffic Category | Shaping Option | ||||
|---|---|---|---|---|---|
| SP | CBS | ATS | CQF | TAS | |
| HTS (isochronous) | ✓ | ||||
| HTS (cyclic synchronous) | ✓ | ✓ | |||
| LTS streams | ✓ | ✓ | |||
| LTS nonstreams | ✓ | ✓ | ✓ | ||
| BE | ✓ | ||||
| Application Area | TSN Profile | Applicable Algorithms |
|---|---|---|
| 5Gs Fronthaul/Xhaul | IEEE802.1CM/de | [63] |
| Industrial automation | IEC/IEEE 60802 | All with few exceptions |
| Automotive | IEEE P802.1DG | [29,30,34,51,59,60,80,81,95,99,101,104,106,110,111] |
| Aerospace | IEEE P802.1DP/SAE AS6675 | None |
| Service provider | P802.1DF | |
| Audio video bridging | 802.1BA |
| Metric | Occurrence in Literature |
|---|---|
| Runtime | 70 |
| Schedulability | 45 |
| Latency | 40 |
| Objective specific | 33 |
| Resource utilization (memory, CPU, link/bandwidth/GB, network) | 19 |
| Jitter | 10 |
| Scalability | 7 |
| Schedule length | 5 |
| Optimality | 3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chahed, H.; Kassler, A. TSN Network Scheduling—Challenges and Approaches. Network 2023, 3, 585-624. https://doi.org/10.3390/network3040026
Chahed H, Kassler A. TSN Network Scheduling—Challenges and Approaches. Network. 2023; 3(4):585-624. https://doi.org/10.3390/network3040026
Chicago/Turabian StyleChahed, Hamza, and Andreas Kassler. 2023. "TSN Network Scheduling—Challenges and Approaches" Network 3, no. 4: 585-624. https://doi.org/10.3390/network3040026
APA StyleChahed, H., & Kassler, A. (2023). TSN Network Scheduling—Challenges and Approaches. Network, 3(4), 585-624. https://doi.org/10.3390/network3040026