
Maritime Communications—Current State and the Future Potential with SDN and SDR



Abstract
:1. Introduction
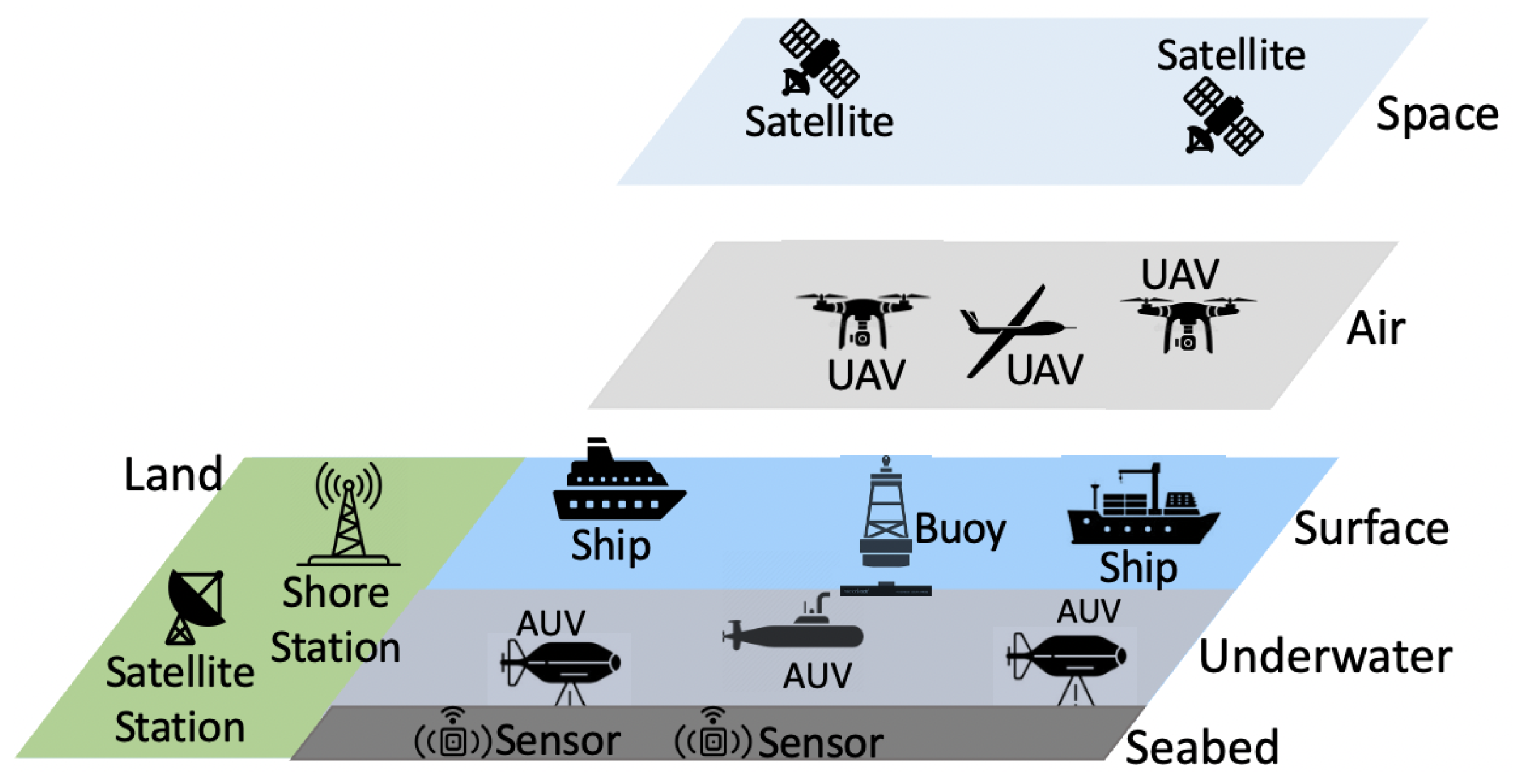
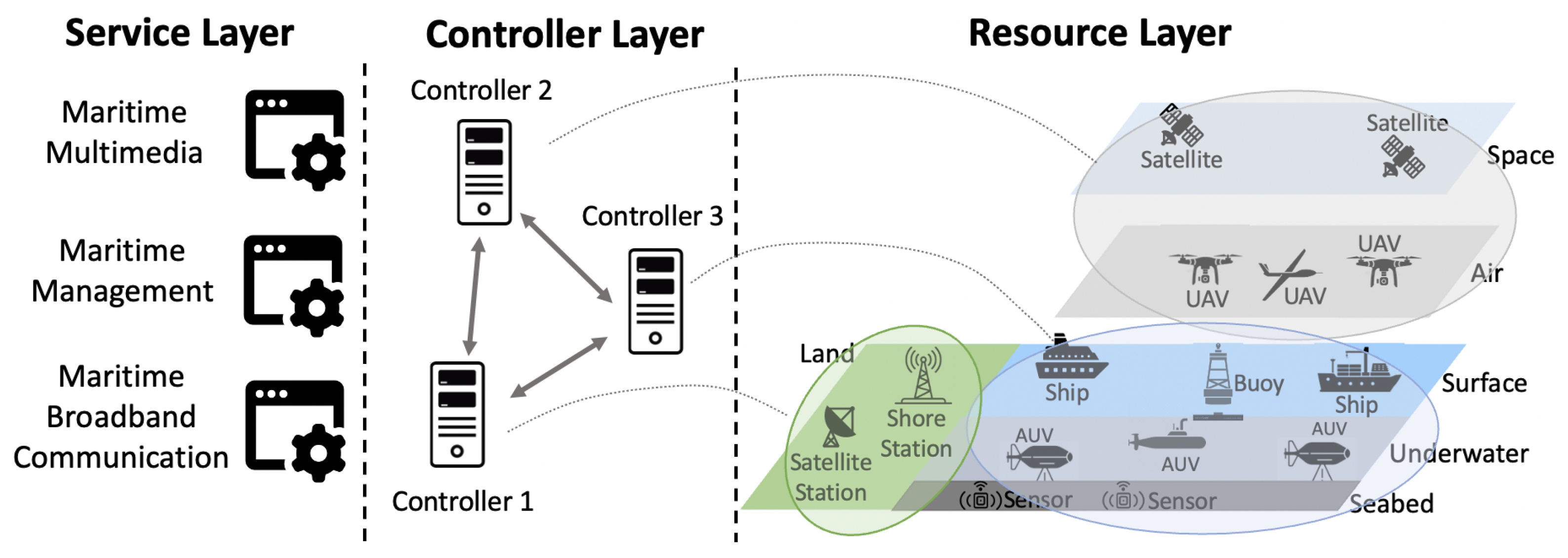
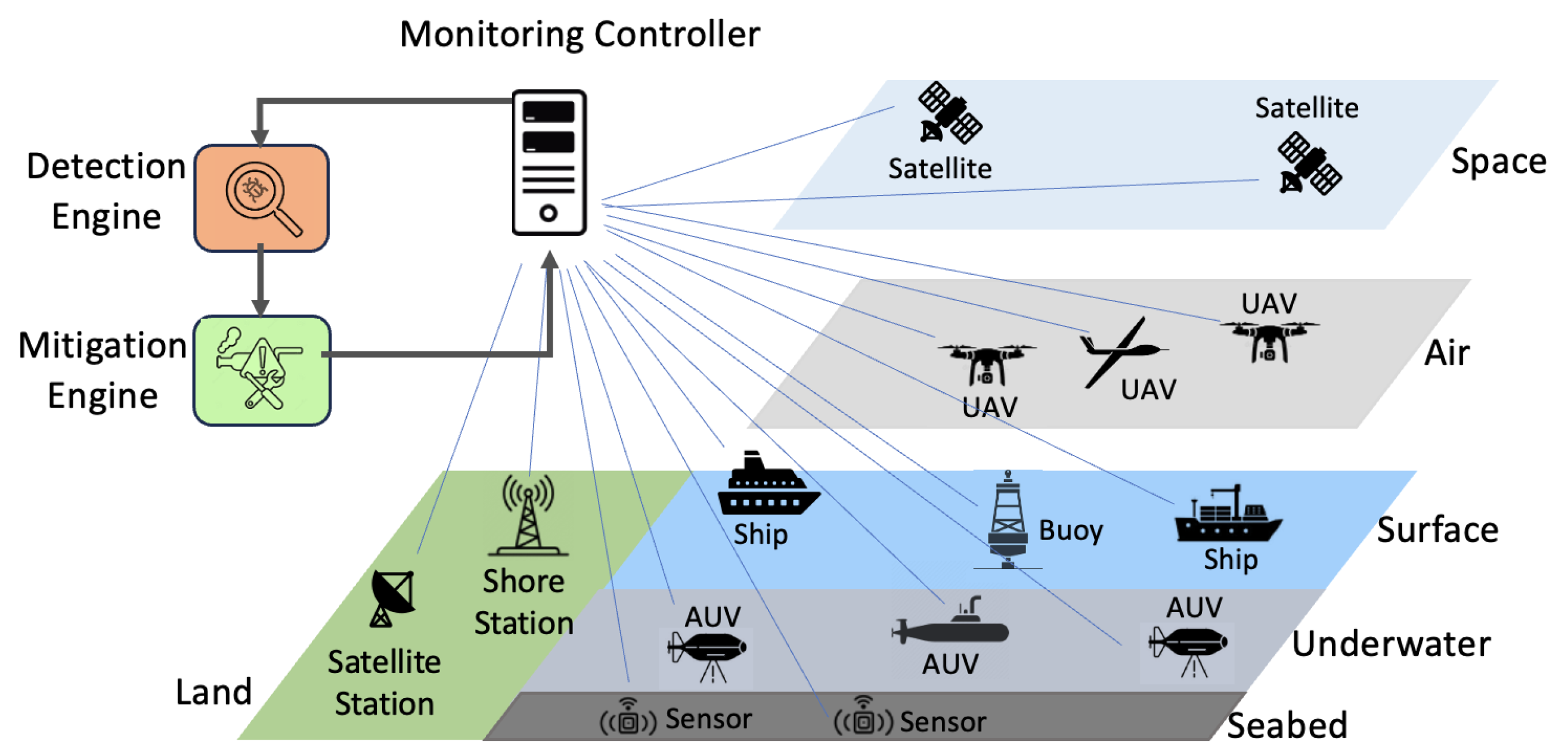
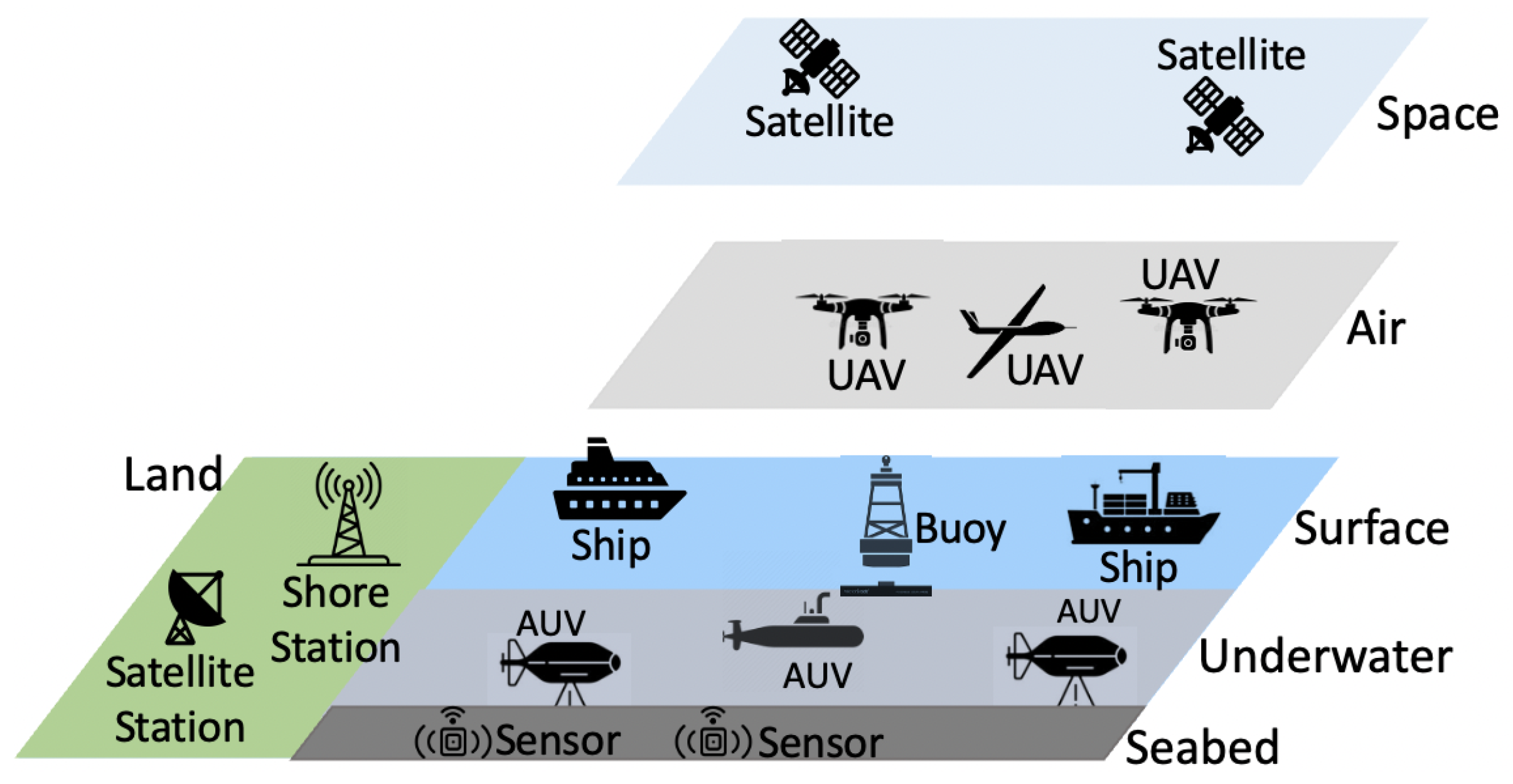
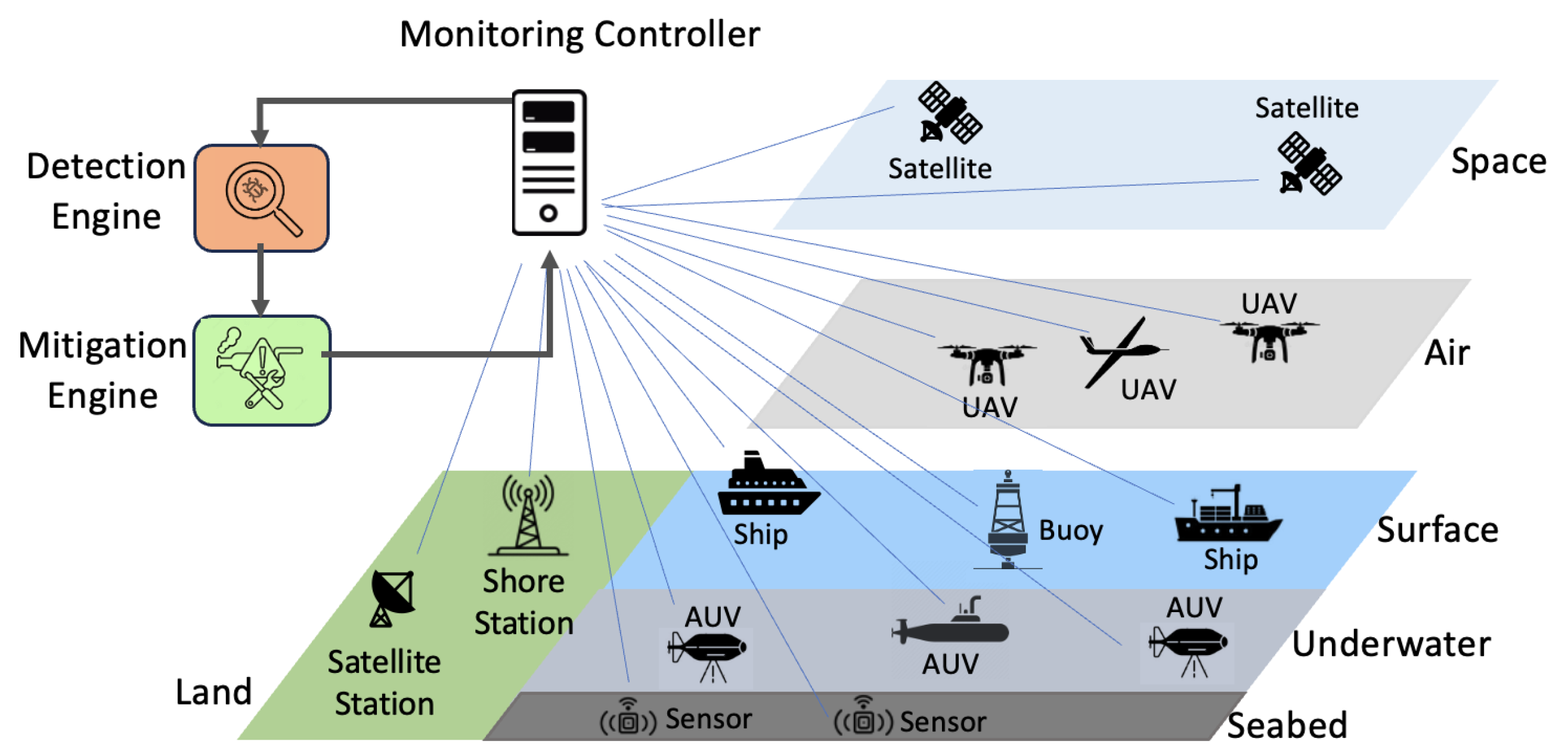
- Land platforms consist of satellite stations, cellular towers, and UAV stations, among other things.
- Water platforms can be categorized into three layers—seabed, underwater, surface. The seabed layer consists of various sensors; the underwater layer consists of AUVs and submarines, among other things; and the surface layer consists of ships, buoys, and USVs, among other things.
- Air platforms consist of UAVs and Hawkeye aircraft that play a critical role in relaying air-to-air and ship-to-air radio communications.
- Space platforms consist of two types of satellites—navigation satellites and communication satellites—in three possible orbits—low earth orbit (LEO), medium earth orbit (MEO), and geostationary orbit (GEO).
- We provide an in-depth review of the current state and various modalities of maritime communications, providing a foundational understanding of the existing landscape.
- We assess the adoption and the potential impact of software-defined radios (SDRs) and software-defined networks (SDNs) in the maritime industry, focusing on their role as IoT enablers. The proposed framework leverages the flexibility of SDRs and SDNs for improved resiliency in maritime communications.
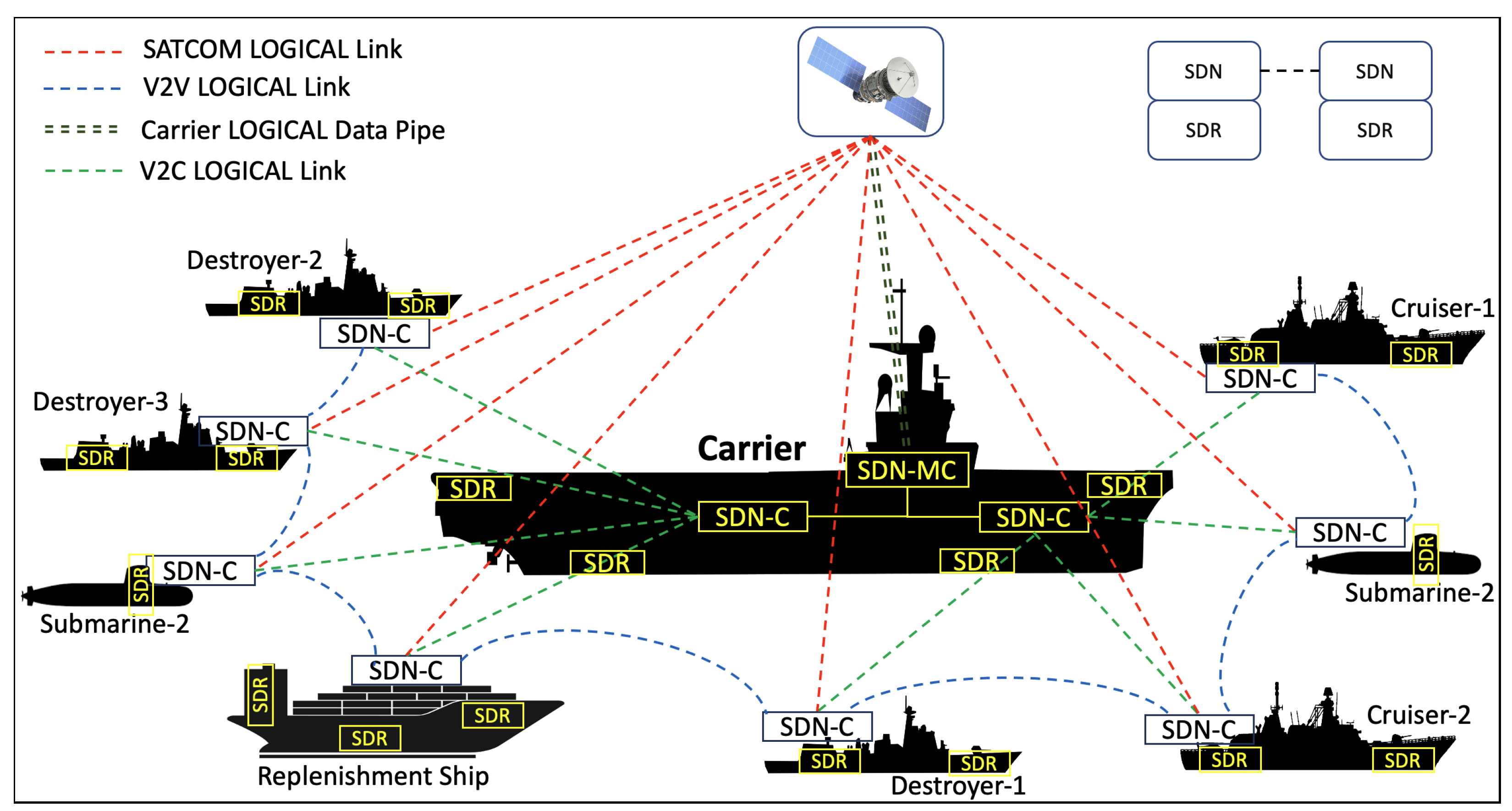
- The proposed maritime communications framework seamlessly integrates with existing satellite communication (SATCOM) infrastructure, for improved communication efficiency and resiliency.
2. Background and Definitions
- Range: A Wi-Fi signal can travel approximately 330 feet (100 m) from an on-land base station, but this may be affected by obstructions between the base station and the receiver, which limits their reliability. Even though Wi-Fi appears to be an economical and fast networking solution, its use is limited by its range of restrictions.
- Latency: There has been considerable effort toward solving the latency problem. While it is not possible to completely eliminate latency, significant improvements have been made to minimize the latency [8,10]. Using satellites requires sending data as radio waves from ground equipment (transmitter) to a satellite (in space), which is then re-transmitted by the satellite to a receiving ground equipment (receiver). While this process occurs at the speed of light, the distance the data must travel and a small amount of processing of signal at the satellite result in latency.
- Service Demands: With advances in networking, IoT, and smart technologies, the demand for data services is at an all-time high [11]. The provision of network connectivity on a cruise ship requires robust and flexible technology, not only for safety, communication, and navigational purposes but also for recreational and business purposes. As a result of this increase in service demands, reliable, flexible, robust, and agile maritime networks have become an essential component of maritime infrastructure [8].
2.1. Maritime Communication
- Near Range—The near range technologies are for short-range communications within a limited area or proximity, such as ship-to-ship or ship-to-shore communication over short distances.
- Wide Area—The wide area technologies are for long-range communication over larger geographic areas, often facilitated by SATCOM systems providing global coverage.
- Narrowband—Narrowband technologies are for communication systems operating within a narrow frequency range, typically used for transmitting small amounts of data, such as text messages or basic voice communication.
- Broadband—Broadband technologies are for high-speed data transmission allowing for transferring large amounts of data, enabling multimedia applications, video streaming, and high-quality voice communication. Examples include cellular networks, very-small-aperture-terminal (VSAT) systems, and dedicated maritime broadband services.
2.2. Unmanned Aerial Vehicles (UAVs)
2.3. Autonomous Underwater Vehicles (AUVs)
2.4. Unmanned Surface Vessels (USV)
3. IT, IoT, IIoT, IoUT, and OT
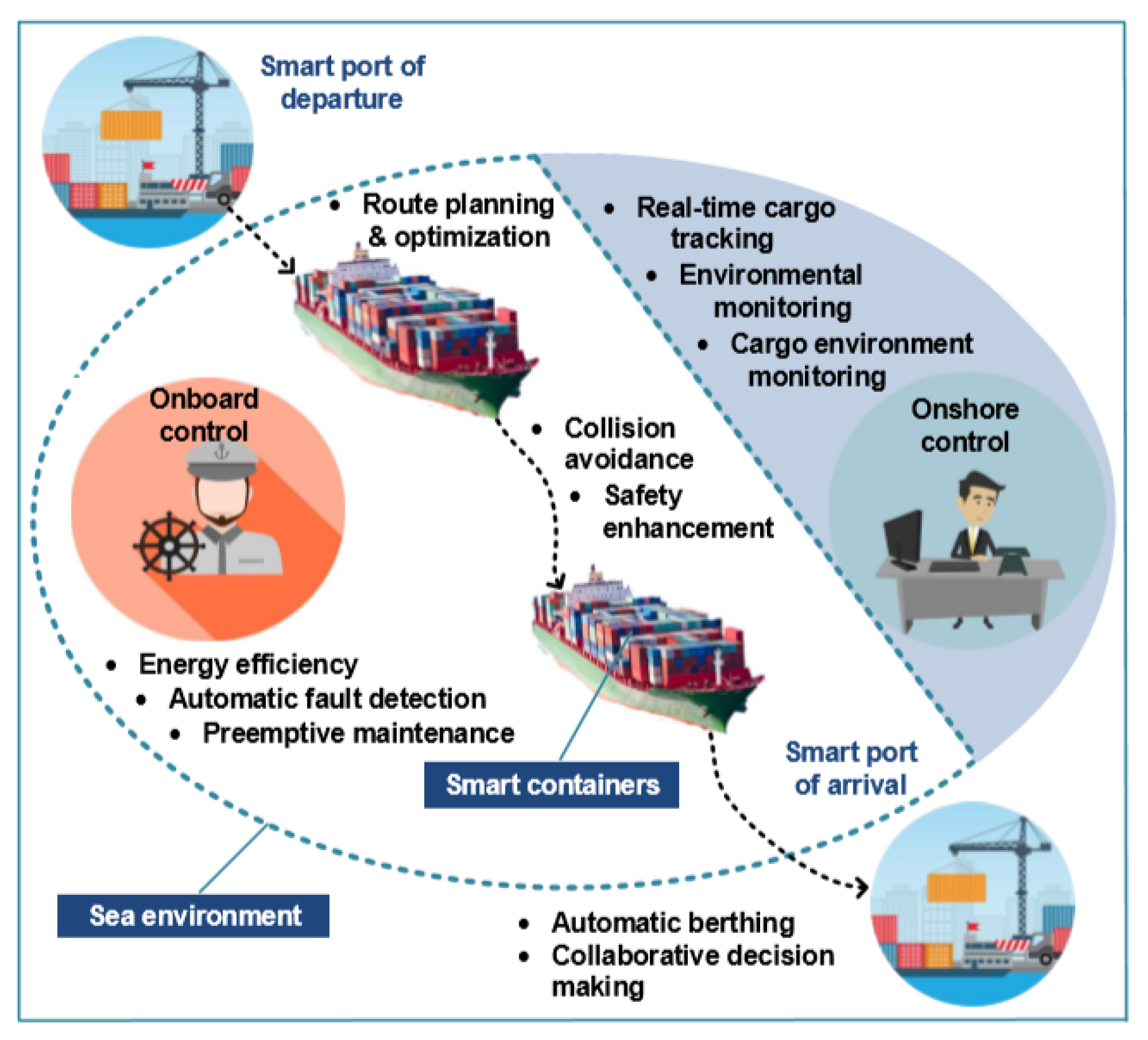
- Cargo: In the maritime industry, one of the key applications of IoT technology is the monitoring and tracking of large items, such as shipping containers, as they move along shipping routes. Additionally, IoT devices can be utilized for fleet management, which can automate and improve the efficiency of logistics, supply, maintenance, and operations associated with the fleet [32].
- Cruise/ferry: The utilization of satellite technology is prevalent in various domains such as fishing, cruise, ferry, and leisure markets. As vessels incorporate specialized equipment for IoT sensor data and IoT connectivity, the use of satellite technology is projected to increase even further.
- Fishing: There has been a significant improvement in the efficiency of monitoring, controlling, and supervising fishing vessels as a result of vessel monitoring systems (VMS). The use of VMS has become mandatory in several countries in recent years to ensure that fishing vessels report their catches to fishery management agencies.
4. Current Security Challenges in Maritime Networks
- There is no authentication or integrity check on the AIS transponders, which makes them vulnerable to hacking, where they could be used to spread fake messages. Attackers use software-defined radios to transmit false man-in-the-water signals, enabling them to remain undetected and transmit false weather reports [35,36].
- Navigation and GPS technologies are actively used in the maritime sector, which is a target for a number of cyber-attacks that aim to exploit design flaws in order to destabilize services that rely on them [37]. By spoofing GPS signals, attackers are able to reroute a vessel without triggering an alarm or alert.
- Autonomous vessels depend on enhanced SATCOMs to transmit operational commands and sensor data, making them susceptible to cyber-attacks such as denial-of-service attacks and man-in-the-middle attacks [38].
- The maritime very-small-aperture-terminal (VSAT) is an essential component for high-speed data transmission during naval operations. However, it lacks authentication, encryption, security, or personal information verification, making all devices vulnerable to attacks at the implementation level. Attackers could send false signals or malicious codes to disable or compromise the system, potentially endangering the safe navigation of the vessel [39].
- It is common for the system to be run on old computers without security updates. It is possible to compromise the system when updating the maps by downloading them from the Internet or manually uploading them via USB. The use of this updated medium can expose the system to many security risks [40].
- Despite the fact that radar signals are harder to interrupt than satellite signals, they are still susceptible to interference and DDoS attacks. Radar can provide inaccurate information about nearby objects in the event of a cyber-attack due to false echoes caused by external radar waves. Inaccurate information can lead to ship collisions.
- In the maritime industry, several network types are used for the transmission of data collected and processed by networked information systems. These technologies include SHIPNET, SAFENET, C3I system, RICE 10, SHIP system 2000, Smart Ship, and TSCE. Several security vulnerabilities exist in these technologies, as the design and configuration of communication links between IT networks neglect to consider authentication and encryption methods, leading to potentially vulnerable and outdated systems being available on the Internet [41].
5. A Framework for SDN–SDR-Based Maritime Communications
5.1. The SDR Approach
5.1.1. SDR Background
5.1.2. SDR Adoption
5.2. The SDN Approach
5.2.1. SDN Background
- Host Multiple Connections: The ability to host multiple connections means that combinations of Wi-Fi, satellite, and mobile communication networks can be utilized as a single connection to provide a more streamlined and less complex maritime network. This also provides a certain level of redundancy for other connections in that, should one connection falter or go down, multiple others could take any redirected traffic onward to its destination.
- Intelligent and Application-Based Routing: One of the lesser celebrated but essential benefits of SDN solutions are their application-based routing [61] and intelligence capabilities [62]. This allows operators to build intelligence into their networks in order to understand the applications they run and their particular bandwidth requirements. Using the multiple wide area network (WAN) links available, maritime software-defined WAN administrators are able to benefit from dynamic application-level routing as well as implement application-based intelligence to overlay traditional packet-based routing. This enables the network to intelligently allocate the best possible connection for each individual bit of traffic.
- Remote Management and Updates: Leveraging SDN technologies can also save enterprises money, space, and resources by allowing SDN networks at their customers’ sites to be managed by service providers from a centralized location. This also allows for networks to be updated remotely through software, instead of needing to house an IT specialist for the duration of every trip.
5.2.2. SDN Adoption
5.3. Maritime Communications Security with SDN
5.4. A Use Case
5.5. Performance Improvement of SDN–SDR over SATCOM
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Alqurashi, F.S.; Trichili, A.; Saeed, N.; Ooi, B.S.; Alouini, M.S. Maritime communications: A survey on enabling technologies, opportunities, and challenges. IEEE Internet Things J. 2022, 10, 3525–3547. [Google Scholar] [CrossRef]
- Aslam, S.; Michaelides,, M.P.; Herodotou, H. Internet of Ships: A Survey on Architectures, Emerging Applications, and Challenges. IEEE Internet Things J. 2020, 7, 9714–9727. [Google Scholar] [CrossRef]
- Xu, Y. Resource Management of Maritime Edge Nodes for Collected Data Feedback. IEEE Access 2020, 8, 131511–131521. [Google Scholar] [CrossRef]
- Huo, Y.; Dong, X.; Beatty, S. Cellular communications in ocean waves for maritime Internet of Things. IEEE Internet Things J. 2020, 7, 9965–9979. [Google Scholar] [CrossRef]
- Wang, J.; Zhou, H.; Li, Y.; Sun, Q.; Wu, Y.; Jin, S.; Quek, T.Q.; Xu, C. Wireless channel models for maritime communications. IEEE Access 2018, 6, 68070–68088. [Google Scholar] [CrossRef]
- Papa, A.; Kutsevol, P.; Mehmeti, F.; Kellerer, W. Effects of SD-RAN Control Plane Design on User Quality of Service. In Proceedings of the 8th IEEE International Conference on Network Softwarization (NetSoft), Milan, Italy, 27 June 2022–1 July 2022; pp. 312–320. [Google Scholar] [CrossRef]
- Bistrović, M.; Komorčec, D. Methods and Proposals for Solutions in the Applicability of a Software-Defined Radio in Maritime Communication. J. Mar. Sci. Eng. 2022, 10, 118. [Google Scholar] [CrossRef]
- Zhu, C.; Zhang, W.; Chiang, Y.H.; Ye, N.; Du, L.; An, J. Software-Defined Maritime Fog Computing: Architecture, Advantages, and Feasibility. IEEE Netw. 2022, 36, 26–33. [Google Scholar] [CrossRef]
- OECD Work in Support of a Sustainable Ocean. Available online: https://www.oecd.org/environment/2022-OECD-work-in-support-of-a-sustainable-ocean.pdf (accessed on 7 July 2023).
- Ghoshal, S.C.; Hossain, M.M.; Das, B.C.; Roy, P.; Razzaque, M.A. Trade-off Between Latency and Energy for Offloading Tasks in Maritime Internet of Things. In Proceedings of the 4th IEEE International Conference on Sustainable Technologies for Industry 4.0 (STI), Dhaka, Bangladesh, 17–18 December 2022; pp. 1–6. [Google Scholar]
- Wang, J.B.; Zeng, C.; Ding, C.; Zhang, H.; Lin, M.; Wang, J. Unmanned Surface Vessel Assisted Maritime Wireless Communication Toward 6G: Opportunities and Challenges. IEEE Wirel. Commun. 2022, 29, 72–79. [Google Scholar] [CrossRef]
- Difference between Bluetooth and Wi-Fi. Available online: https://www.geeksforgeeks.org/difference-between-bluetooth-and-wi-fi/ (accessed on 27 June 2023).
- Alweera, A.; HWMVA, W.; Chandrasiri, R.; De Silva, W.; Gamage, I.; Thilakarathna, T. Location Tracking, Messaging, and Monitoring System for Lightweight Boats Using LoRa Technology ‘Safe Ride’. Int. J. Eng. Manag. Res. 2022, 12, 62–68. [Google Scholar]
- Zhang, X.; Wang, H.; Zhao, H. An SDN framework for UAV backbone network towards knowledge centric networking. In Proceedings of the IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Honolulu, HI, USA, 15–19 April 2018; pp. 456–461. [Google Scholar]
- Wu, J. A multi-tiered network with aerial and ground coverage. Comput. Commun. 2018, 131, 39–42. [Google Scholar] [CrossRef]
- Suggala, S.T.; Pothukuchi, S.; Khan, N.A. SDN assisted UAV communication systems: Efficient Deployment Strategies. arXiv 2021, arXiv:2105.10755. [Google Scholar]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of important issues in UAV communication networks. IEEE Commun. Surv. Tutor. 2015, 18, 1123–1152. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Othman, N.Q.H.; Li, Y.; Alsharif, M.H.; Khan, M.A. Unmanned aerial vehicles (UAVs): Practical aspects, applications, open challenges, security issues, and future trends. Intell. Serv. Robot. 2023, 16, 109–137. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Feng, W.; Wang, J.; Chen, Y.; Ge, N.; Wang, C.X. Enabling 5G on the ocean: A hybrid satellite-UAV-terrestrial network solution. IEEE Wirel. Commun. 2020, 27, 116–121. [Google Scholar] [CrossRef]
- Fang, X.; Feng, W.; Wang, Y.; Chen, Y.; Ge, N.; Ding, Z.; Zhu, H. NOMA-based hybrid satellite-UAV-terrestrial networks for 6G maritime coverage. IEEE Trans. Wirel. Commun. 2022, 22, 138–152. [Google Scholar] [CrossRef]
- Zikou, L.; Papachristos, C.; Tzes, A. The power-over-tether system for powering small UAVs: Tethering-line tension control synthesis. In Proceedings of the 23rd IEEE Mediterranean Conference on Control and Automation (MED), Torremolinos, Spain, 16–19 June 2015; pp. 681–687. [Google Scholar]
- Trethowan, J.; Wang, Z.; Wong, K.C. The Viability of a Grid of Autonomous Ground-Tethered UAV Platforms in Agricultural Pest Bird Control. Machines 2023, 11, 377. [Google Scholar] [CrossRef]
- Popov, P.; Mihailov, E.; Dumitrache, L. A new approach to the development of hydrography. In Proceedings of the 9th International Conference EuroGOOS, Brest, France, 3–5 May 2021; pp. 180–185. [Google Scholar]
- Alam, M.S.; Hossain, M.F. Reliability and delay in AUV navigation using EM wave based underwater sensor network with shadow fading. In Proceedings of the IEEE International Conference on Telecommunications and Photonics (ICTP), Dhaka, Bangladesh, 26–28 December 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Zheng, H.; Wang, N.; Wu, J. Minimizing deep sea data collection delay with autonomous underwater vehicles. Parallel Distrib. Comput. 2017, 104, 99–113. [Google Scholar] [CrossRef]
- Han, G.; Long, X.; Zhu, C.; Guizani, M.; Bi, Y.; Zhang, W. An AUV location prediction-based data collection scheme for underwater wireless sensor networks. IEEE Trans. Veh. Technol. 2019, 68, 6037–6049. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, Y.; Yu, X.; Yuan, C. Unmanned surface vehicles: An overview of developments and challenges. Annu. Rev. Control 2016, 41, 71–93. [Google Scholar] [CrossRef]
- Zeng, C.; Wang, J.B.; Ding, C.; Lin, M.; Wang, J. MIMO Unmanned Surface Vessels Enabled Maritime Wireless Network Coexisting With Satellite Network: Beamforming and Trajectory Design. IEEE Trans. Commun. 2023, 71, 83–100. [Google Scholar] [CrossRef]
- Plaza-Hernández, M.; Gil-González, A.B.; Rodríguez-González, S.; Prieto-Tejedor, J.; Corchado-Rodríguez, J.M. Integration of IoT technologies in the maritime industry. In Proceedings of the 17th International Conference on Distributed Computing and Artificial Intelligence, Special Sessions, Salamanca, Spain, 6–8 October 2021; Springer: Berlin/Heidelberg, Germany, 2021; pp. 107–115. [Google Scholar]
- Jahanbakht, M.; Xiang, W.; Hanzo, L.; Azghadi, M.R. Internet of underwater things and big marine data analytics—a comprehensive survey. IEEE Commun. Surv. Tutor. 2021, 23, 904–956. [Google Scholar] [CrossRef]
- Wei, T.; Feng, W.; Chen, Y.; Wang, C.X.; Ge, N.; Lu, J. Hybrid satellite-terrestrial communication networks for the maritime Internet of Things: Key technologies, opportunities, and challenges. IEEE Internet Things J. 2021, 8, 8910–8934. [Google Scholar] [CrossRef]
- Chaudhry, S.A.; Irshad, A.; Khan, M.A.; Khan, S.A.; Nosheen, S.; AlZubi, A.A.; Zikria, Y.B. A lightweight authentication scheme for 6G-IoT enabled maritime transport system. IEEE Trans. Intell. Transp. Syst. 2021, 24, 2401–2410. [Google Scholar] [CrossRef]
- Silverajan, B.; Vistiaho, P. Enabling cybersecurity incident reporting and coordinated handling for maritime sector. In Proceedings of the 14th IEEE Asia Joint Conference on Information Security (AsiaJCIS), Kobe, Japan, 1–2 August 2019; pp. 88–95. [Google Scholar]
- Neo, C.M. Soundings Papers: The Rising Threat of Maritime Cyber-Attacks: Level of Maritime Cyber-Security Preparedness along the Straits of Malacca and Singapore | Royal Australian Navy—navy.gov.au. Available online: https://www.navy.gov.au/media-room/publications/soundings-42 (accessed on 10 May 2023).
- Balduzzi, M.; Pasta, A.; Wilhoit, K. A security evaluation of AIS automated identification system. In Proceedings of the 30th Annual Computer Security Applications Conference, New Orleans, LA, USA, 8–12 December 2014; pp. 436–445. [Google Scholar]
- Akpan, F.; Bendiab, G.; Shiaeles, S.; Karamperidis, S.; Michaloliakos, M. Cybersecurity Challenges in the Maritime Sector. Network 2022, 2, 123–138. [Google Scholar] [CrossRef]
- Androjna, A.; Brcko, T.; Pavic, I.; Greidanus, H. Assessing cyber challenges of maritime navigation. Mar. Sci. Eng. 2020, 8, 776. [Google Scholar] [CrossRef]
- Global Maritime Security Risks Rise with GNSS Use. Emerald Expert Briefings. 2019. Available online: https://dailybrief.oxan.com/Analysis/DB246110/Global-maritime-security-risks-rise-with-GNSS-use (accessed on 6 December 2023).
- Pavur, J.; Moser, D.; Strohmeier, M.; Lenders, V.; Martinovic, I. A tale of sea and sky on the security of maritime VSAT communications. In Proceedings of the 2020 IEEE Symposium on Security and Privacy (SP), San Francisco, CA, USA, 18–21 May 2020; pp. 1384–1400. [Google Scholar]
- Svilicic, B.; Kamahara, J.; Celic, J.; Bolmsten, J. Assessing ship cyber risks: A framework and case study of ECDIS security. WMU J. Marit. Aff. 2019, 18, 509–520. [Google Scholar] [CrossRef]
- Ben Farah, M.A.; Ukwandu, E.; Hindy, H.; Brosset, D.; Bures, M.; Andonovic, I.; Bellekens, X. Cyber security in the maritime industry: A systematic survey of recent advances and future trends. Information 2022, 13, 22. [Google Scholar] [CrossRef]
- Chen, W.; Li, C.; Yu, J.; Zhang, J.; Chang, F. A survey of maritime communications: From the wireless channel measurements and modeling perspective. Reg. Stud. Mar. Sci. 2021, 48, 102031. [Google Scholar] [CrossRef]
- Status of Conventions. Available online: https://www.imo.org/en/About/Conventions/Pages/StatusOfConventions.aspx (accessed on 7 June 2023).
- Medici, G.M. Modern Maritime Communications. In Proceedings of the 29th World Radiocommunication Seminar, International Telecommunication Union (ITU), Virtual, 30 November–11 December 2020. [Google Scholar]
- Krishnan, R.; Babu, R.G.; Kaviya, S.; Kumar, N.P.; Rahul, C.; Raman, S.S. Software defined radio (SDR) foundations, technology tradeoffs: A survey. In Proceedings of the 2017 IEEE International Conference on Power, Control, Signals and Instrumentation Engineering (ICPCSI), Chennai, India, 21–22 September 2017; pp. 2677–2682. [Google Scholar] [CrossRef]
- Dillinger, M.; Madani, K.; Alonistioti, N. Software Defined Radio: Architectures, Systems and Functions; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Gomes, A. 5G and Spectrum: Different Approaches. In Proceedings of the ITU Workshop: 5G and New Technologies, Lomé, Republic of Togo, 9–11 September 2019. [Google Scholar]
- International Telecommunication Union. Recommendation ITU-R (Radio Communication Sector of ITU) M.1371–1374; Technical Report; International Telecommunication Union (ITU): Geneva, Switzerland, 2010. [Google Scholar]
- Oshea, T.J.; Roy, T.; West, N.; Hilburn, B.C. Physical Layer Communications System Design Over-the-Air Using Adversarial Networks. In Proceedings of the 2018 26th European Signal Processing Conference (EUSIPCO), Rome, Italy, 3–7 September 2018; pp. 529–532. [Google Scholar] [CrossRef]
- McHale, J. New Communications for Navy Ships Based on Software-Defined Radio. Military Aerospace, 1 February 2007. [Google Scholar]
- Manaranche, M. Sea Air Space 2021: General Dynamics Introduces New Badger Software-Defined Radio. Available online: https://www.navalnews.com/event-news/sea-air-space-2021/2021/08/sea-air-space-2021-general-dynamics-introduces-new-badger-software-defined-radio/ (accessed on 7 June 2023).
- Romero-Godoy, D.; Molina-Padrón, N.; Cabrera, F.; Araña, V.; Jiménez, E. Design and implementation of a prototype with a low-cost SDR platform for the next generation of maritime communications. In Proceedings of the 3rd URSI Atlantic and Asia Pacific Radio Science Meeting (AT-AP-RASC), Gran Canaria, Spain, 30 May–4 June 2022; pp. 1–4. [Google Scholar] [CrossRef]
- Marques, M.M.; Teles, D.C.; Lobo, V.S.; Capela, G. Low-cost AIS Transponder using an SDR device. In Proceedings of the OCEANS 2019 MTS/IEEE SEATTLE, Seattle, WA, USA, 27–31 October 2019; pp. 1–4. [Google Scholar]
- Oubbati, O.S.; Atiquzzaman, M.; Ahanger, T.A.; Ibrahim, A. Softwarization of UAV networks: A survey of applications and future trends. IEEE Access 2020, 8, 98073–98125. [Google Scholar] [CrossRef]
- Yang, T.; Kong, L.; Zhao, N.; Sun, R. Efficient energy and delay tradeoff for vessel communications in SDN based maritime wireless networks. IEEE Trans. Intell. Transp. Syst. 2021, 22, 3800–3812. [Google Scholar] [CrossRef]
- Biswas, R.; Wu, J. Efficient Switch Migration for Controller Load Balancing in Software Defined Networking. In Proceedings of the 33th IEEE International Teletraffic Congress (ITC-33), Avignon, France, 31 August–3 September 2021; pp. 1–9. [Google Scholar]
- Larsen, J.A.; Mortensen, H.P.; Nielsen, J.D. An SDR based AIS receiver for satellites. In Proceedings of the 5th IEEE International Conference on Recent Advances in Space Technologies-RAST2011, Istanbul, Turkey, 9–11 June 2011; pp. 526–531. [Google Scholar]
- Shome, P.; Modares, J.; Mastronarde, N.; Sprintson, A. Enabling dynamic reconfigurability of SDRs using SDN principles. In Proceedings of the Ad Hoc Networks: 8th International Conference, ADHOCNETS 2016, Ottawa, ON, Canada, 26–27 September 2016; Revised Selected Papers. Springer: Berlin/Heidelberg, Germany, 2017; pp. 369–381. [Google Scholar]
- Deguzman, A.; Ebken, J.; Ho, N.; Lai, R.; Nunez, D.; Raizada, M.; Ross, P.; Tran, N. Network Centric Communications for Expeditionary or Carrier Strike Groups. Ph.D. Thesis, Naval Postgraduate School, Monterey, CA, USA, 2011. [Google Scholar]
- Kreutz, D.; Ramos, F.M.V.; Veríssimo, P.E.; Rothenberg, C.E.; Azodolmolky, S.; Uhlig, S. Software-Defined Networking: A Comprehensive Survey. IEEE 2015, 103, 14–76. [Google Scholar] [CrossRef]
- Kushwaha, A.; Bazard, N.; Gumaste, A. IPv6 Flow-Label based Application Aware Routing in SDNs. In Proceedings of the IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Vancouver, BC, Canada, 10–13 May 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Cui, H.; Zhu, Y.; Yao, Y.; Yufeng, L.; Liu, Y. Design of intelligent capabilities in SDN. In Proceedings of the 4th International Conference on Wireless Communications, Vehicular Technology, Information Theory and Aerospace & Electronic Systems (VITAE), Aalborg, Denmark, 11–14 May 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Niknami, N.; Wu, J. Enhancing Load Balancing by Intrusion Detection System Chain on SDN Data Plane. In Proceedings of the IEEE Conference on Communications and Network Security (CNS), Austin, TX, USA, 3–5 October 2022; pp. 264–272. [Google Scholar]
- Du, J.; Song, J.; Ren, Y.; Wang, J. Convergence of broadband and broadcast/multicast in maritime information networks. Tsinghua Sci. Technol. 2021, 26, 592–607. [Google Scholar] [CrossRef]
- Nazari, S.; Du, P.; Gerla, M.; Hoffmann, C.; Kim, J.H.; Capone, A. Software defined naval network for satellite communications (sdn-sat). In Proceedings of the IEEE Military Communications (MILCOM), Baltimore, MD, USA, 1–3 November 2016; pp. 360–366. [Google Scholar]
- Kazmi, S.H.A.; Qamar, F.; Hassan, R.; Nisar, K.; Chowdhry, B.S. Survey on joint paradigm of 5G and SDN emerging mobile technologies: Architecture, security, challenges and research directions. Wirel. Pers. Commun. 2023, 130, 2753–2800. [Google Scholar] [CrossRef]
- Faujdar, N.; Agrawal, R.; Agarwal, A. Identification of 5G Network Complexity Using SDN. In Advances in Computational Intelligence and Communication Technology: Proceedings of CICT 2021; Springer: Berlin/Heidelberg, Germany, 2022; pp. 127–137. [Google Scholar]
- Desai, P.R.; Mini, S.; Tosh, D.K. Edge-based Optimal Routing in SDN-enabled Industrial Internet of Things. IEEE Internet Things J. 2022, 9, 18898–18907. [Google Scholar] [CrossRef]
- Sahay, R.; Meng, W.; Estay, D.S.; Jensen, C.D.; Barfod, M.B. CyberShip-IoT: A dynamic and adaptive SDN-based security policy enforcement framework for ships. Future Gener. Comput. Syst. 2019, 100, 736–750. [Google Scholar] [CrossRef]
- Iridium Satellite Communications. Satellites 101: LEO vs. GEO; Iridium Satellite Communications: McLean, VA, USA, 2018. [Google Scholar]
- Dascal, V.; Dolea, P.; Cristea, O.; Palade, T. Low-cost SDR-based ground receiving station for LEO satellite operations. In Proceedings of the 11th International Conference on Telecommunications in Modern Satellite, Cable and Broadcasting Services (TELSIKS), Nis, Serbia, 16–19 October 2013; Volume 2, pp. 627–630. [Google Scholar] [CrossRef]
- Lucresi, I.; Di Carlofelice, A.; Tognolatti, P. SDR-based system for satellite ranging measurements. IEEE Aerosp. Electron. Syst. Mag. 2016, 31, 8–13. [Google Scholar] [CrossRef]
- Maheshwarappa, M.R.; Bowyer, M.D.; Bridges, C.P. A reconfigurable SDR architecture for parallel satellite reception. IEEE Aerosp. Electron. Syst. Mag. 2018, 33, 40–53. [Google Scholar] [CrossRef]
- Gavrilă, C.; Popescu, V.; Alexandru, M.; Murroni, M.; Sacchi, C. An SDR-Based Satellite Gateway for Internet of Remote Things (IoRT) Applications. IEEE Access 2020, 8, 115423–115436. [Google Scholar] [CrossRef]
- Colombo, R.M.; Mahmood, A.; Sisinni, E.; Ferrari, P.; Gidlund, M. Low-cost SDR-based Tool for Evaluating LoRa Satellite Communications. In Proceedings of the IEEE International Symposium on Measurements & Networking (M&N), Padua, Italy, 18–20 July 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Maheshwarappa, M.R.; Bowyer, M.; Bridges, C.P. Software defined radio (SDR) architecture to support multi-satellite communications. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015; pp. 1–10. [Google Scholar]
- CHIPS Articles: NAVWAR Tests New Technologies for Future Fleet at Trident Warrior 2021. Available online: https://www.doncio.navy.mil/chips/ArticleDetails.aspx?ID=15323 (accessed on 20 August 2023).
- Lagana, J.P. FORCEnet: An Analysis of the Trident Warrior 2003 Exercise. Master’s Thesis, Naval Postgraduate School, Monterey, CA, USA, 2003. [Google Scholar]
- International Telecommunication Union. Satellite Detection of Automatic Identification System Messages; International Telecommunication Union Report ITU-R M.2084; International Telecommunication Union (ITU): Geneva, Switzerland, 2006. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Summary |
|---|---|
| [14] | SDN-based framework for stable and efficient communication strategies for UAVs, addressing intermittent links, changing network topology, power constraints, link switching, routing, and load balance. |
| [54] | SDN-based UAV network controller collects network statistics, uses data for decision-making, emphasizing controller responsiveness, load, and device proximity for enhanced cost reduction, reduced latency, and reliability. |
| [55] | Joint sleep scheduling and opportunistic transmission scheme in maritime wireless communication networks using SDN to balance energy consumption and delay. |
| [56] | Use of multiple controllers for reducing response delay. |
| [57] | Integration of SDR-based AIS receiver into AAUSAT3 satellite, noting versatility and adaptability of new detection algorithms. |
| [58] | CrossFlow approach for application development in SDR networks, combining SDR and SDN principles for flexibility and modular architecture in wireless radio networks. |
| [59] | Discussion of SATCOM bandwidths on ships, highlighting the cost-effectiveness of indirect communication. |
| [52] | Presentation of a prototype for AIS and VDES using a low-cost SDR platform, with additional filtering and amplification for improved performance. |
| [53] | Proposal for a low-cost AIS transmitter using SDR technology and open-source software, confirming feasibility through tests. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Niknami, N.; Srinivasan, A.; St. Germain, K.; Wu, J. Maritime Communications—Current State and the Future Potential with SDN and SDR. Network 2023, 3, 563-584. https://doi.org/10.3390/network3040025
Niknami N, Srinivasan A, St. Germain K, Wu J. Maritime Communications—Current State and the Future Potential with SDN and SDR. Network. 2023; 3(4):563-584. https://doi.org/10.3390/network3040025
Chicago/Turabian StyleNiknami, Nadia, Avinash Srinivasan, Ken St. Germain, and Jie Wu. 2023. "Maritime Communications—Current State and the Future Potential with SDN and SDR" Network 3, no. 4: 563-584. https://doi.org/10.3390/network3040025
APA StyleNiknami, N., Srinivasan, A., St. Germain, K., & Wu, J. (2023). Maritime Communications—Current State and the Future Potential with SDN and SDR. Network, 3(4), 563-584. https://doi.org/10.3390/network3040025