
Measurement and Analysis of RSS Using Bluetooth Mesh Network for Localization Applications



Abstract
:1. Introduction
- Experimentally study RSS measurements using BLE devices to better understand the key factors that may impact the performance of BLE localization systems, including small-scale fading effects with BLE signals and channel model differences among widely spaced advertising channels, and
- Explore new design techniques by exploiting the unique features of BLE systems to improve the performance of the RSS-based BLE localization solutions, including time-frequency diversity offered by three widely spaced advertising channels and the Bluetooth mesh networking technology.
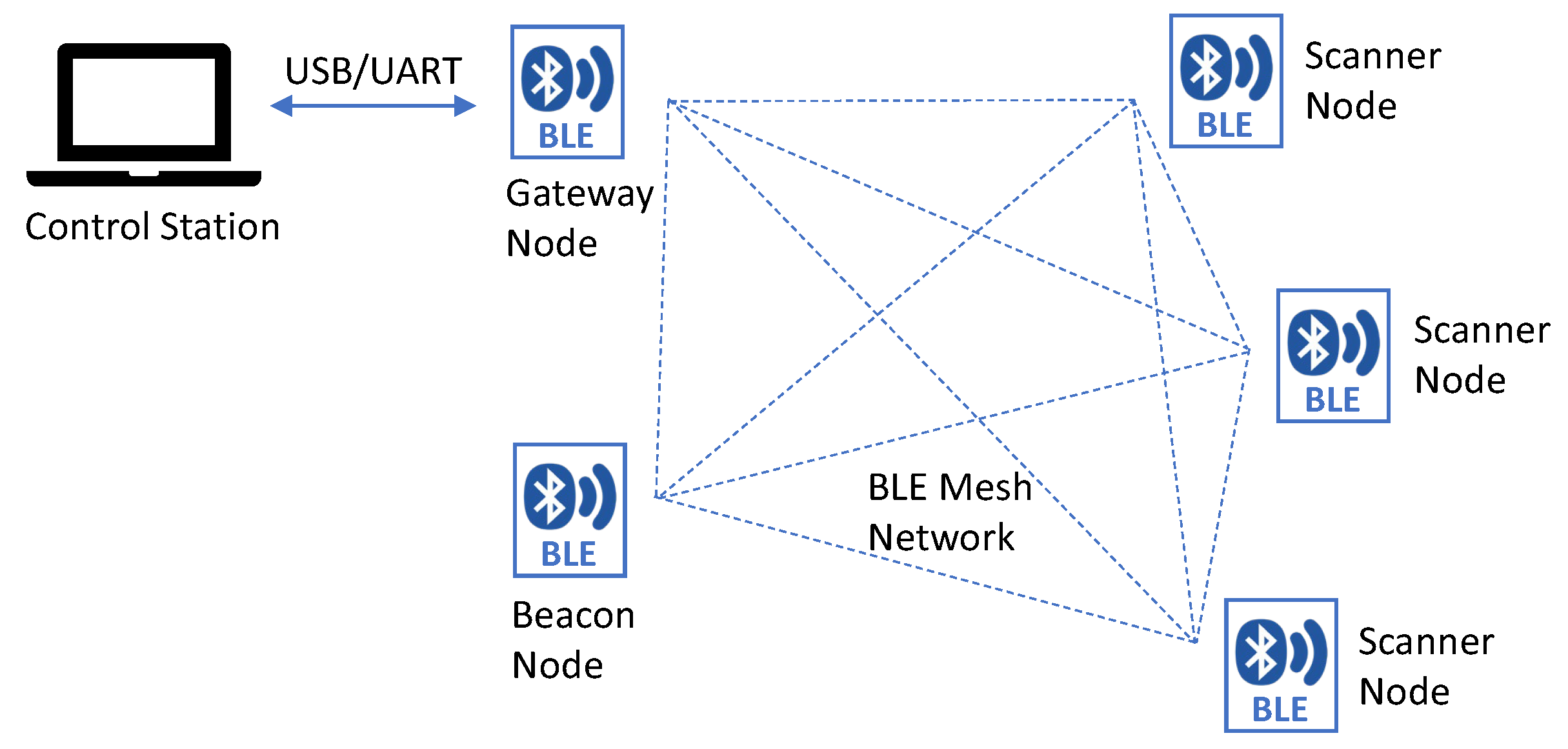
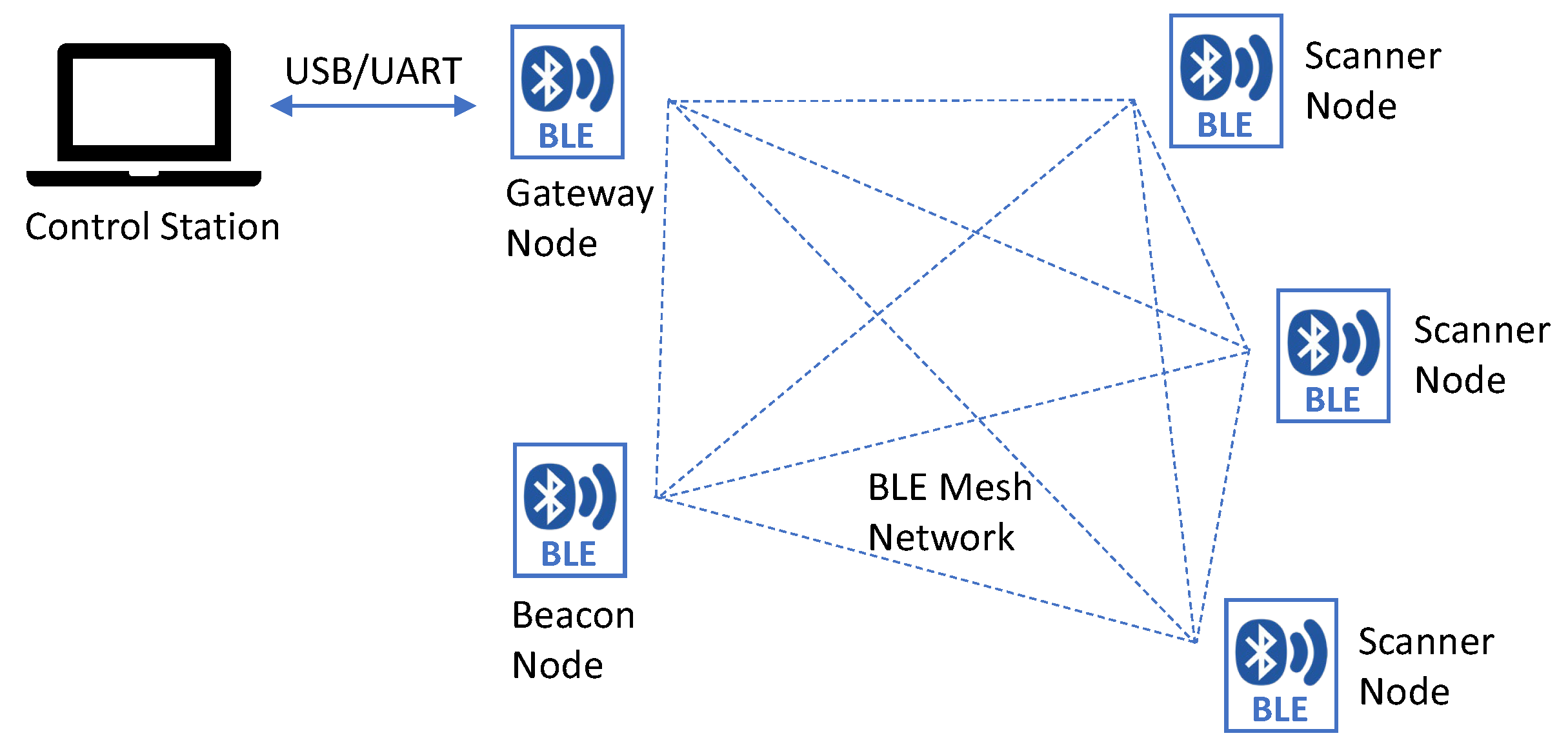
- We have presented a general framework for experimentally characterizing RSS measurements using the Bluetooth mesh network-based measurement system. We have presented design details of the proposed measurement system in terms of system architecture, hardware design, and communication protocols.
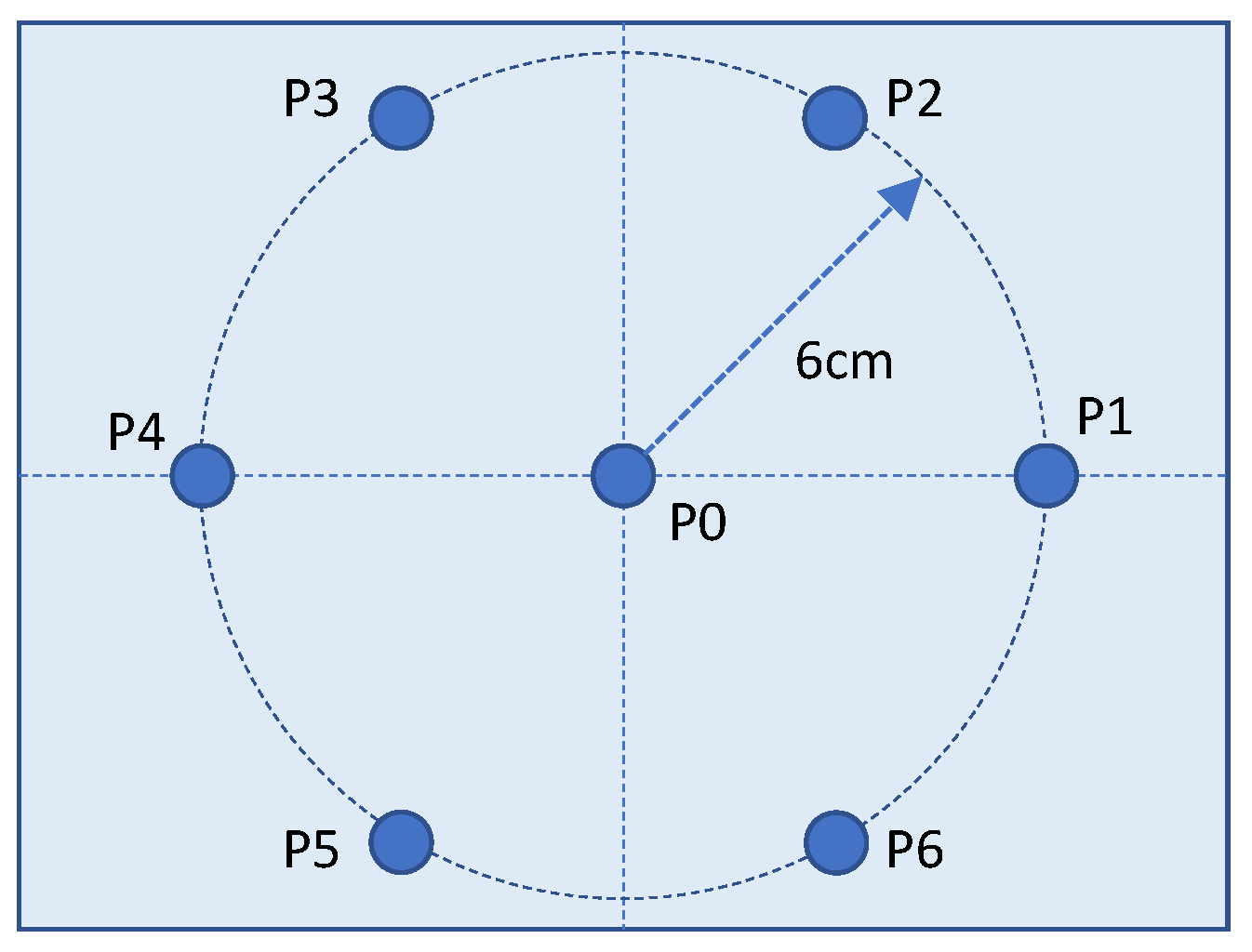
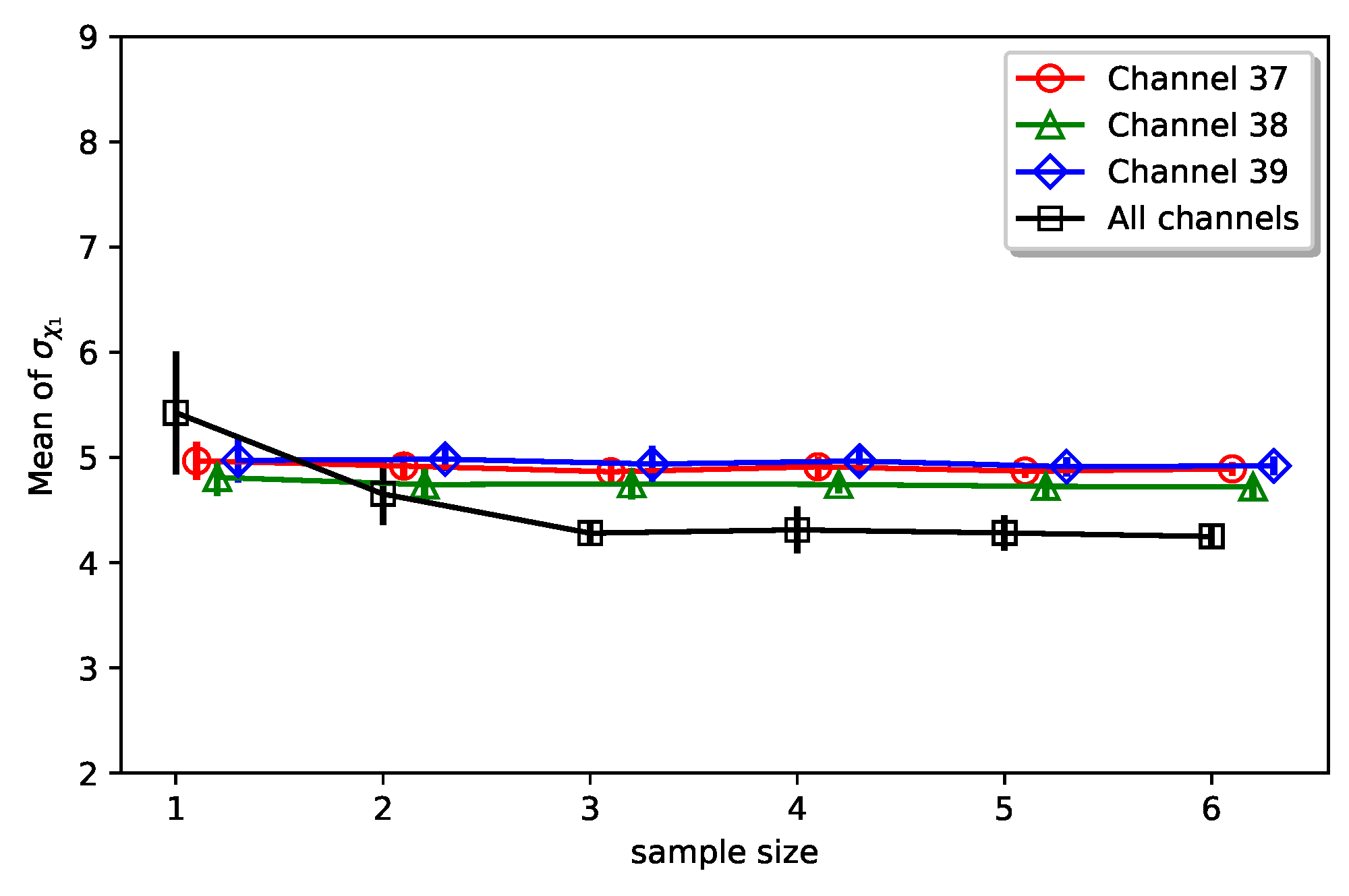
- We have proposed a six-receiver configuration and a space-time-frequency diversity combining scheme to reduce the residual linear regression fitting errors in path loss models. Such a reduction can lead to more accurate range or location estimation based on RSS measurements, which is fundamentally important for localization.
2. Related Works
3. Radio Channel Characteristics and Models
3.1. Multipath Small-Scale Fading
3.2. Path Loss and Shadowing
4. Bluetooth Mesh Network for Experimental Studies of RSS Measurements
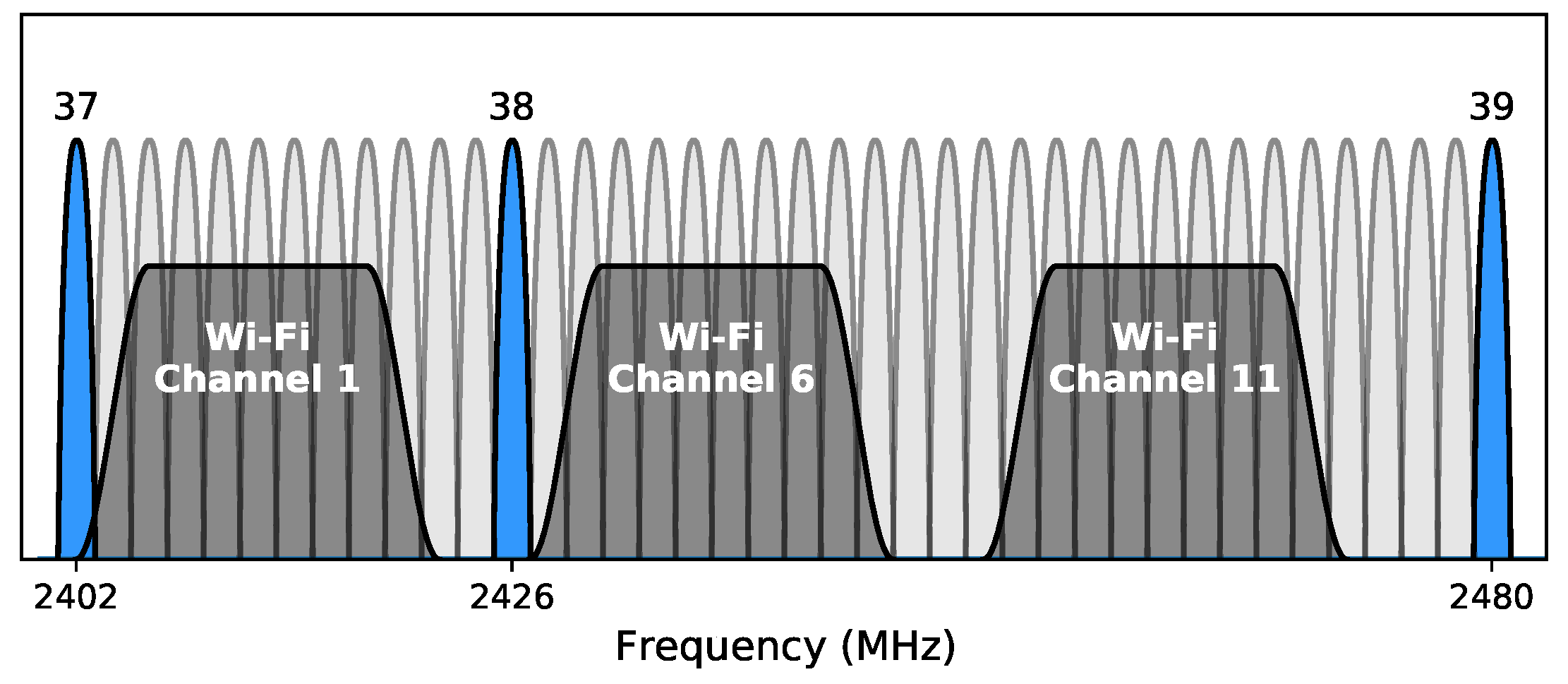
4.1. Specifications of BLE Signals
4.2. RSS Measurement System Using Bluetooth Mesh Network
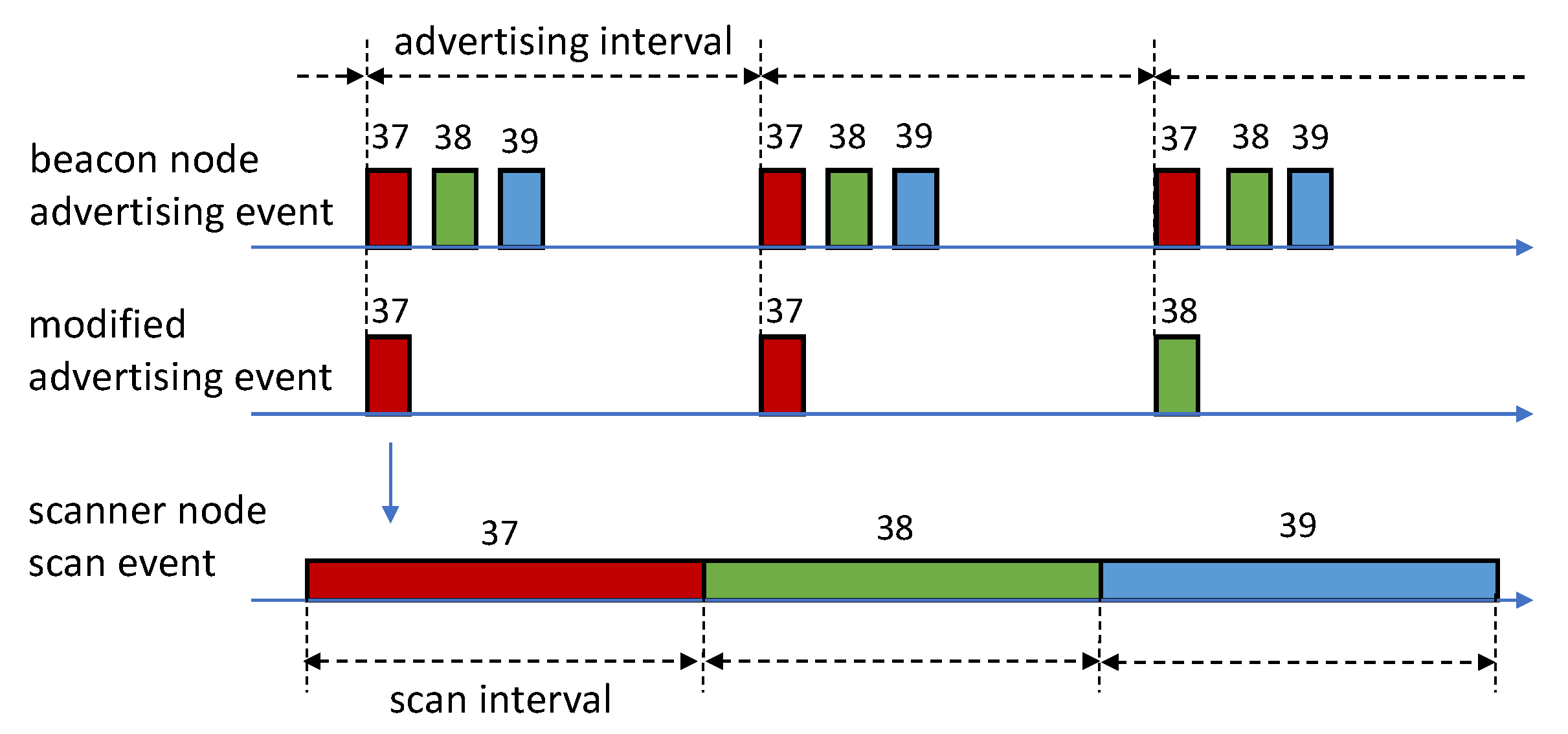
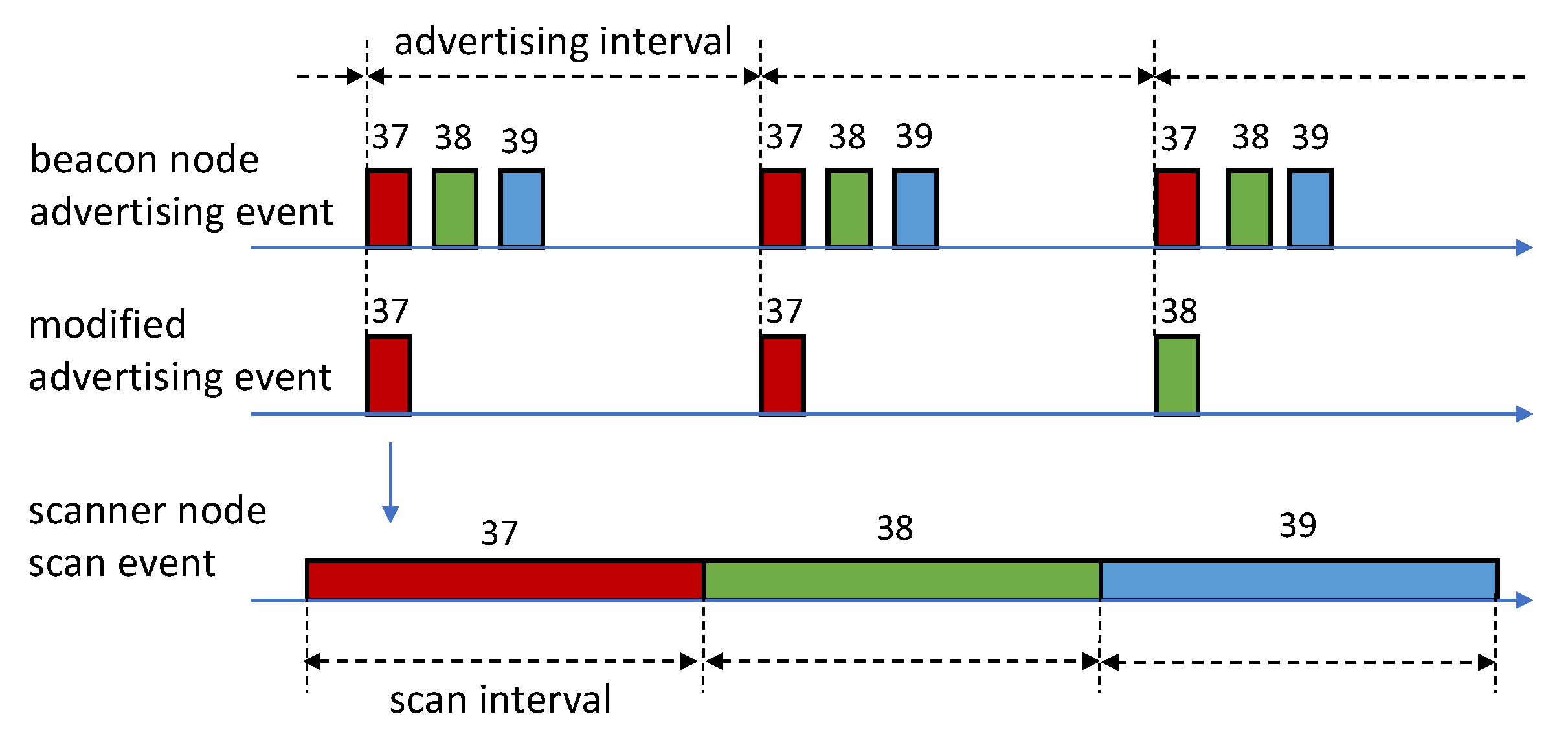
4.3. Design of Communication Protocols for Channel-Aware Multi-Device RSS Measurements
5. Analysis of RSS Measurements Using Bluetooth Mesh Network
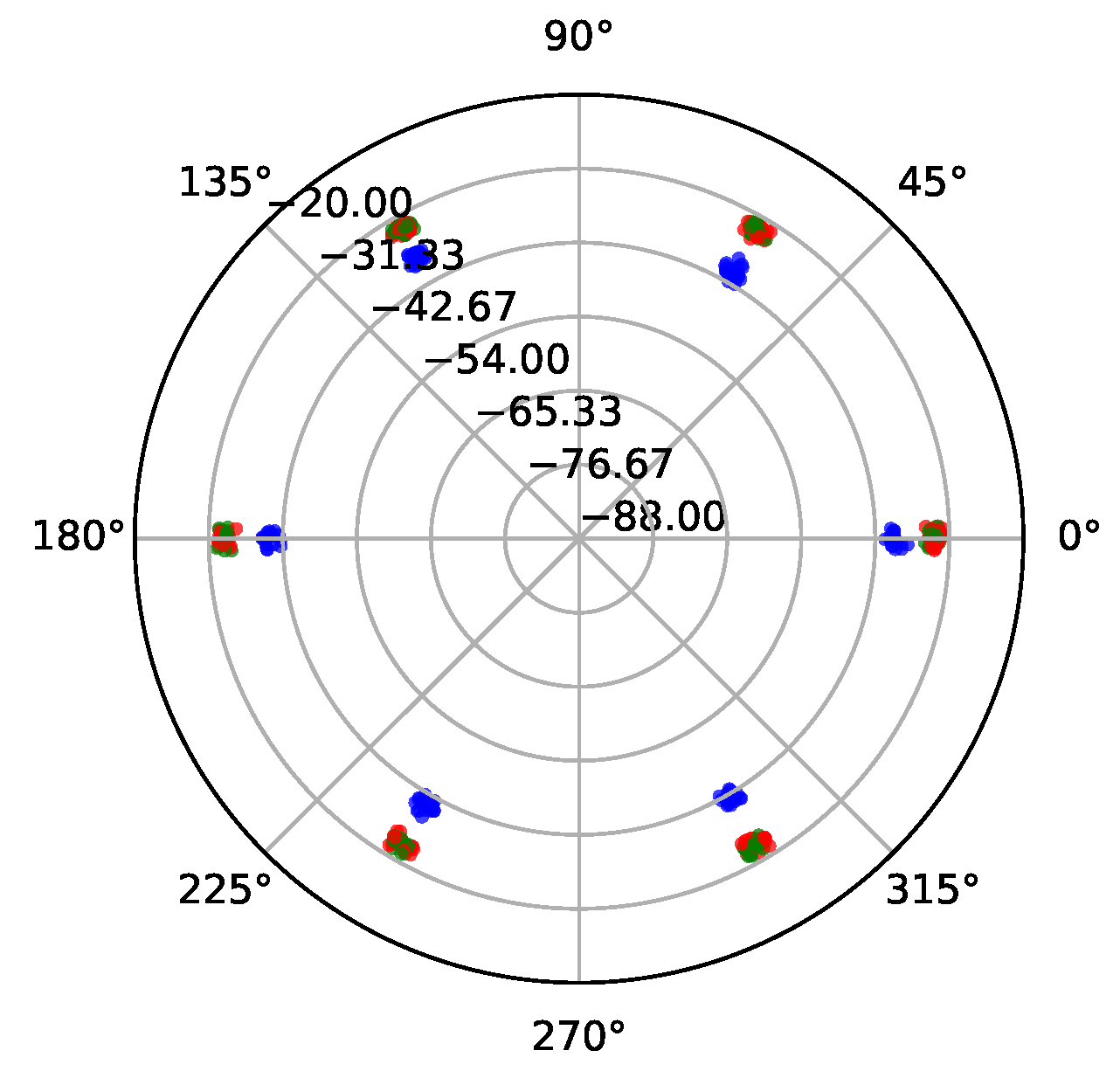
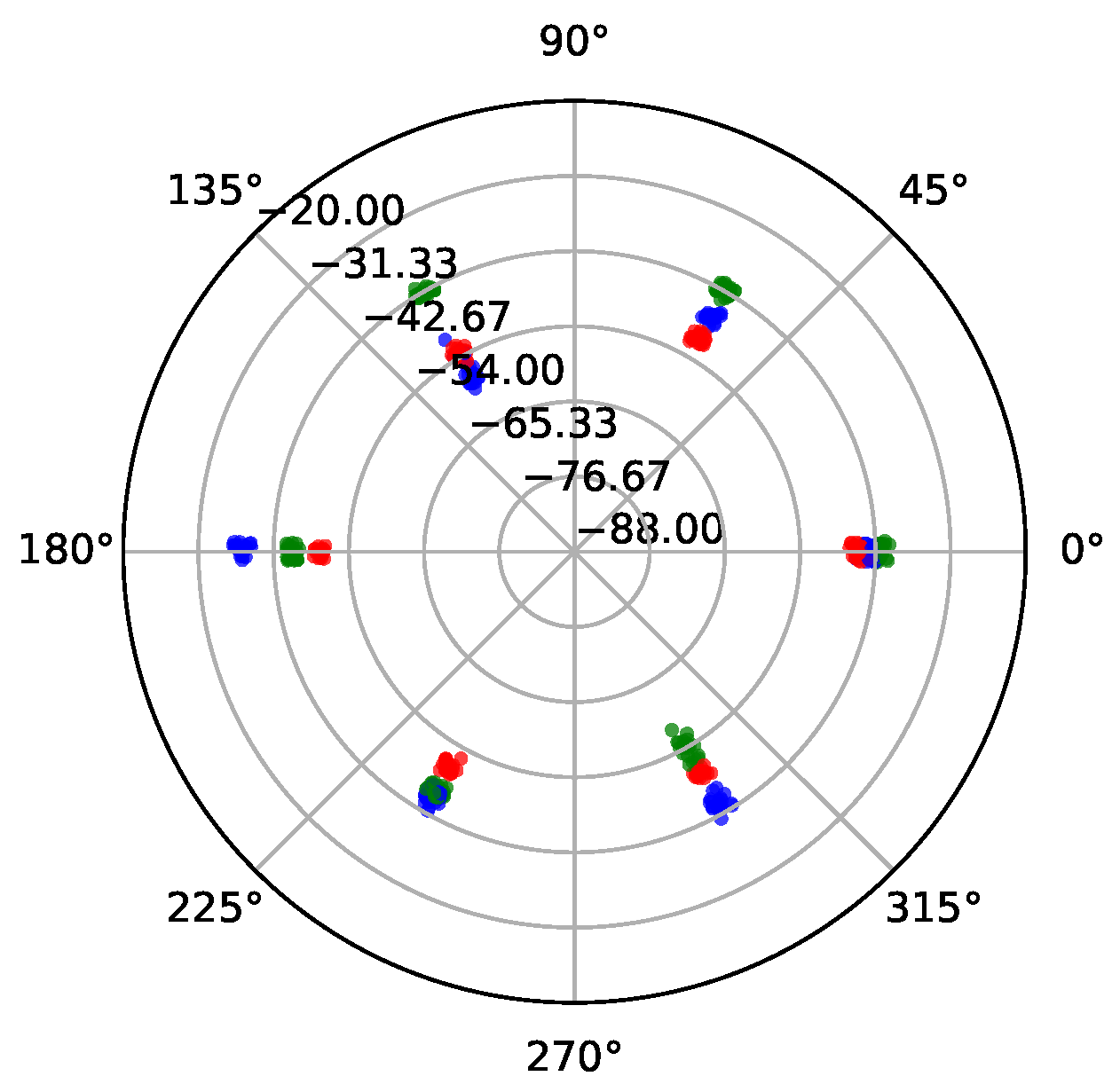
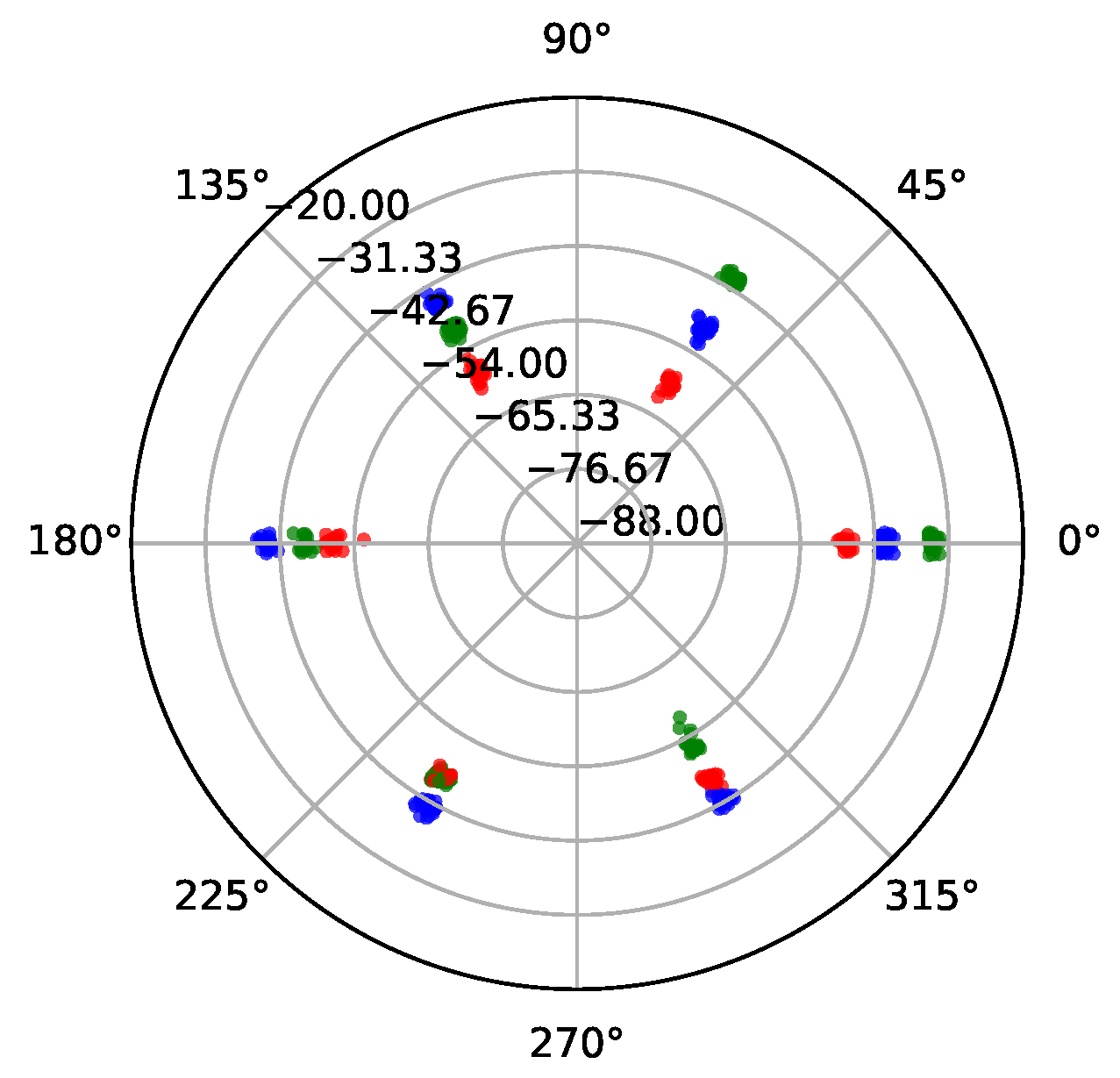
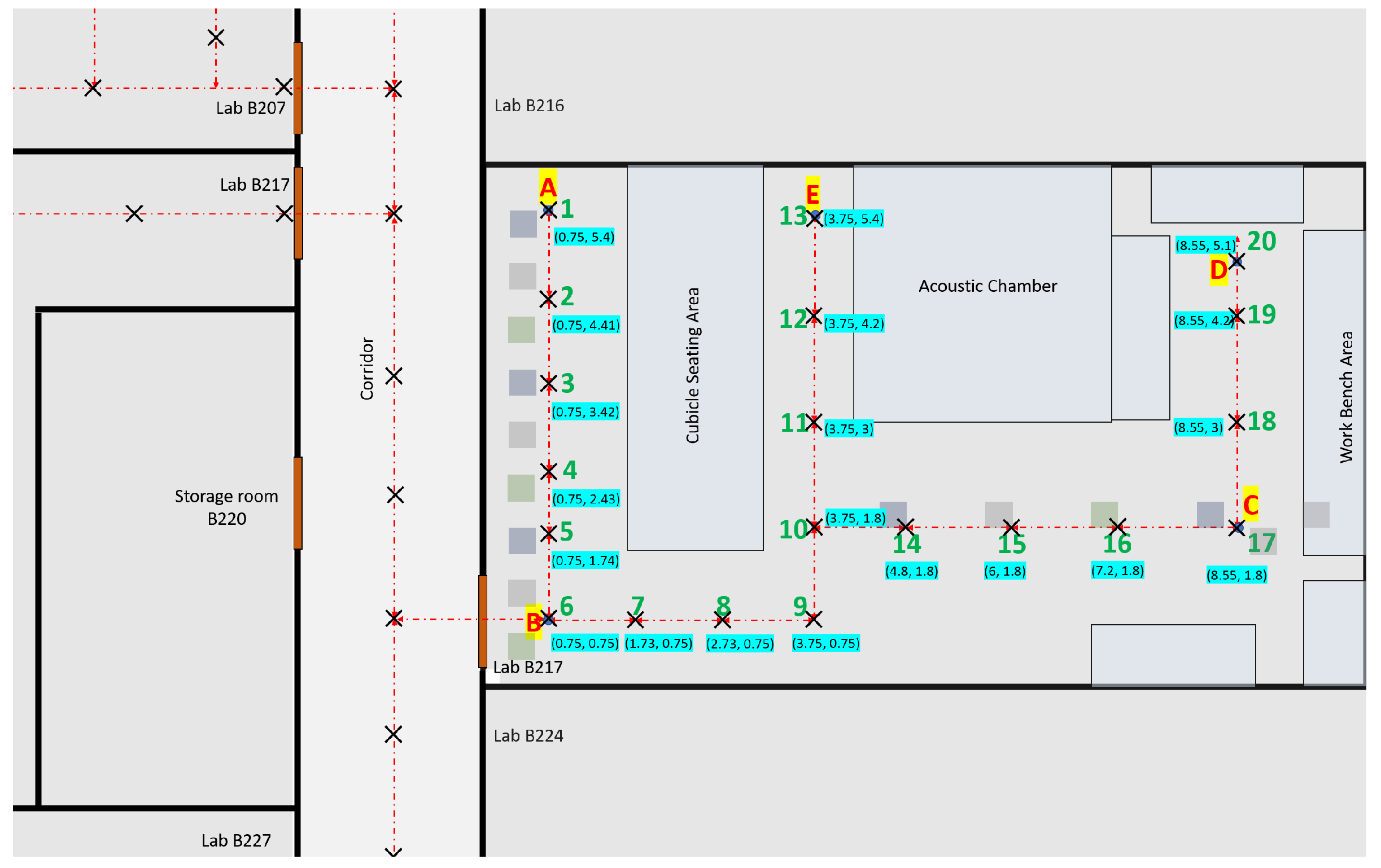
5.1. Antenna Radiation Patterns
5.2. Small-Scale Multipath Fading
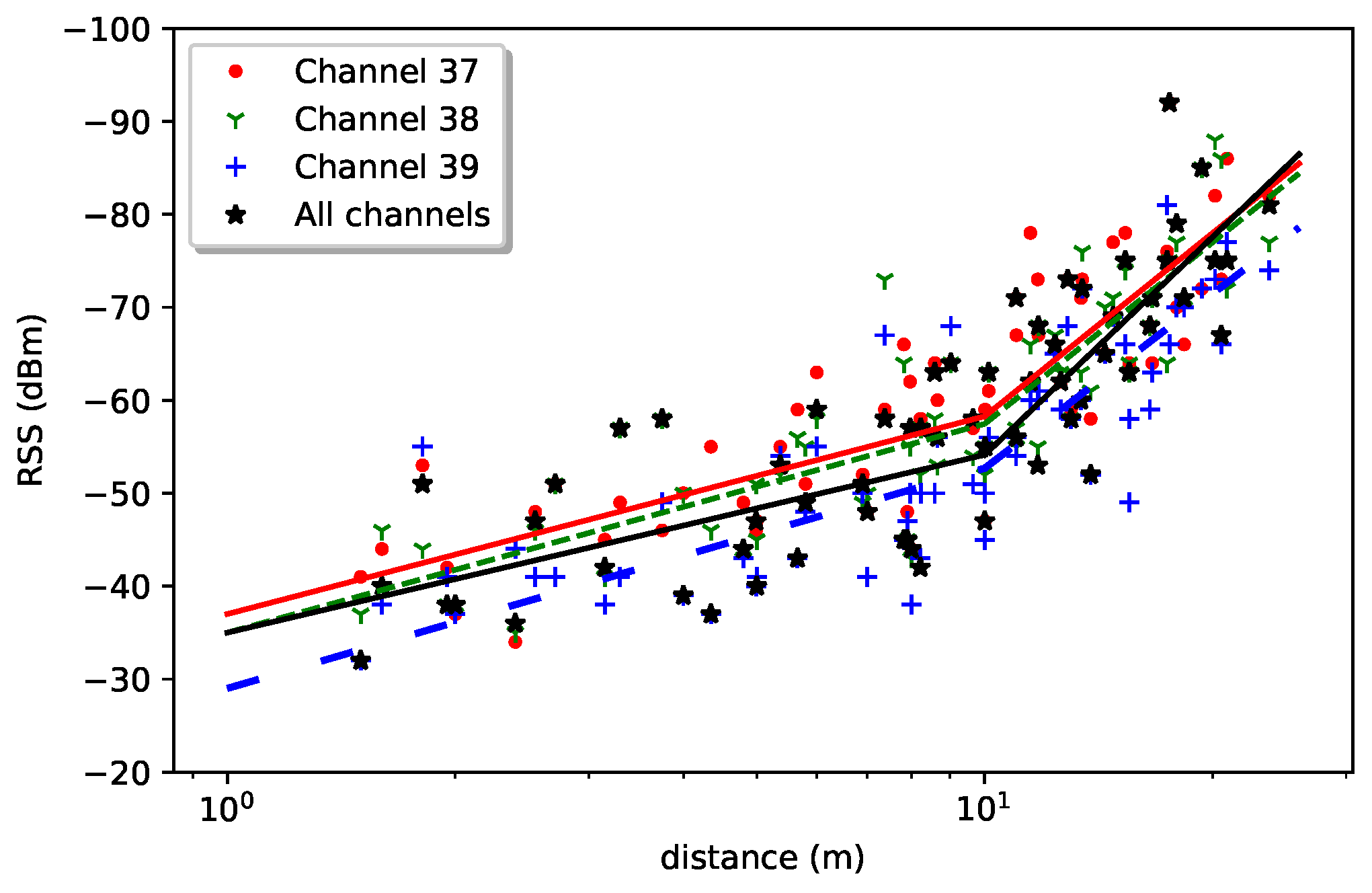
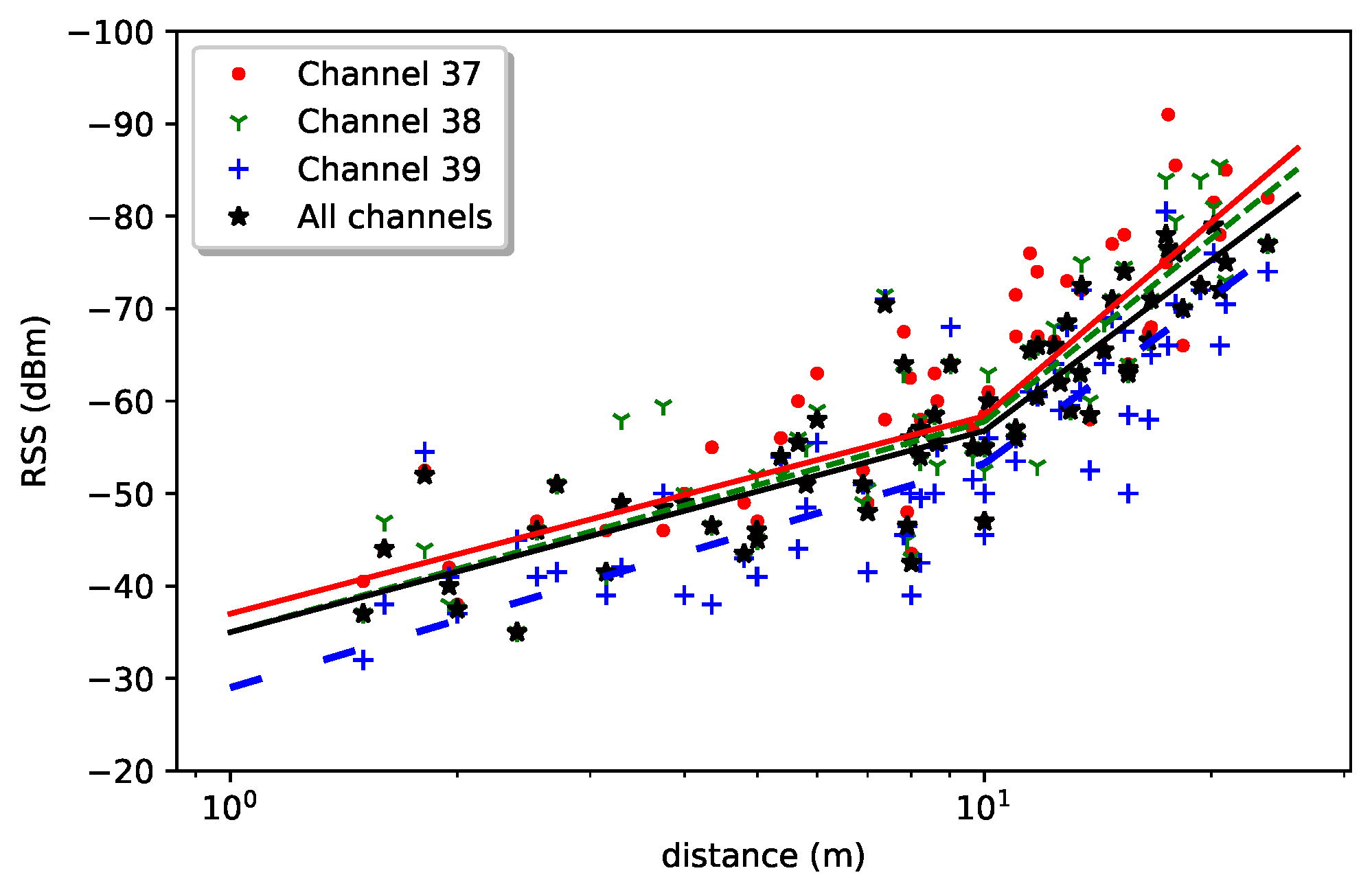
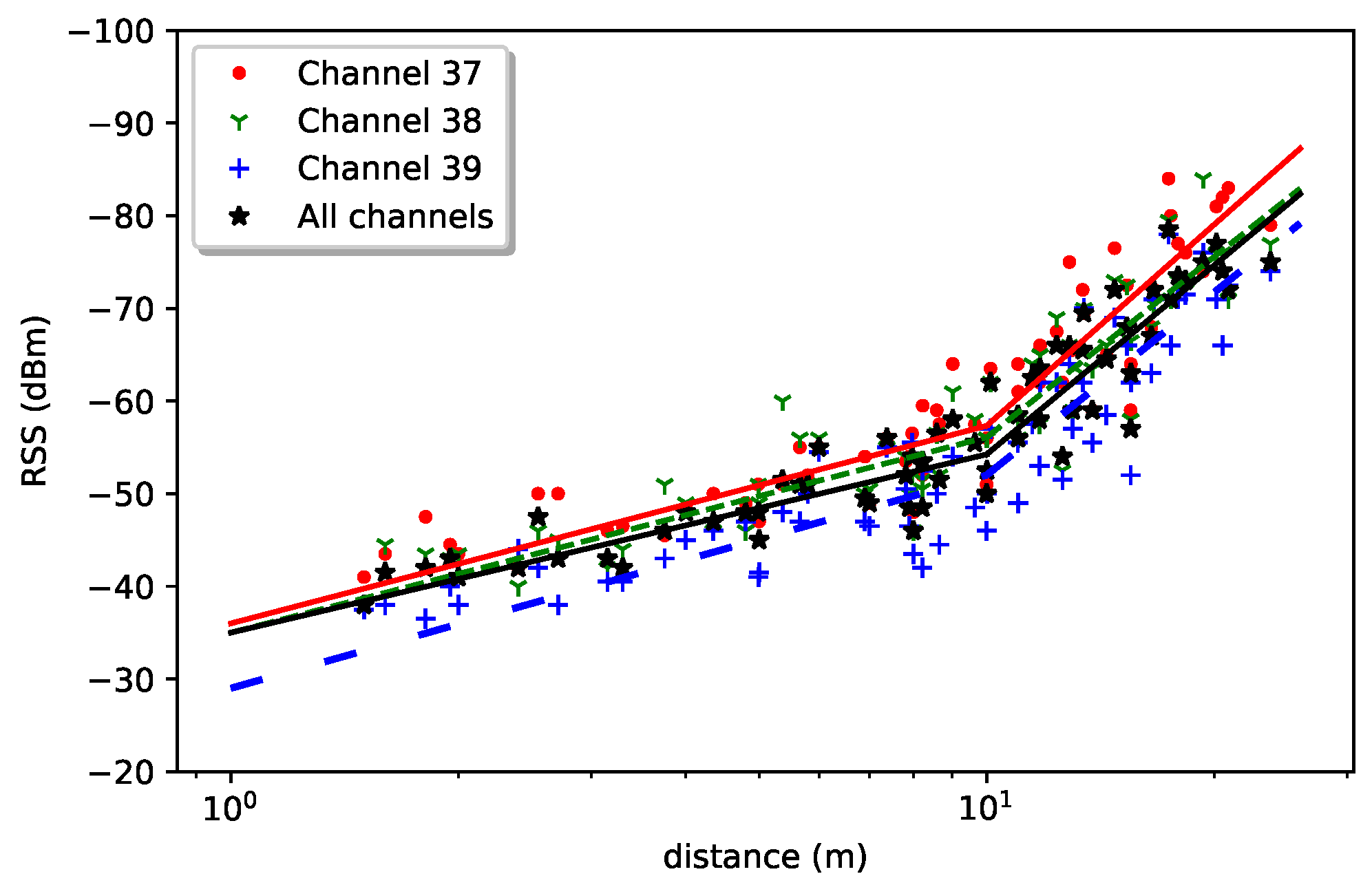
5.3. Path Loss Models
6. Summary and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Alletto, S.; Cucchiara, R.; del Fiore, G.; Mainetti, L.; Mighali, V.; Patrono, L.; Serra, G. An indoor location-aware system for an IoT-based smart museum. IEEE Internet Things J. 2016, 3, 244–253. [Google Scholar] [CrossRef]
- Jeon, K.E.; She, J.; Soonaswad, P.; Ng, P.C. BLE beacons for Internet of Things applications: Survey, challenges, and opportunities. IEEE Internet Things J. 2018, 5, 811–828. [Google Scholar] [CrossRef]
- Bluetooth SIG. Enhancing Bluetooth Location Services with Direction Finding. Bluetooth Resources. 2019. Available online: https://www.bluetooth.com (accessed on 1 November 2020).
- Spachos, P.; Plataniotis, K.N. BLE beacons for indoor positioning at an interactive IoT-Based smart museum. IEEE Syst. J. 2020, 14, 3483–3493. [Google Scholar] [CrossRef] [Green Version]
- Faragher, R.; Harle, R. Location fingerprinting with Bluetooth Low Energy beacons. IEEE J. Sel. Areas Commun. 2015, 33, 2418–2428. [Google Scholar] [CrossRef]
- Li, X. RSS-based location estimation with unknown pathloss model. IEEE Trans. Wirel. Commun. 2006, 5, 3626–3633. [Google Scholar] [CrossRef]
- Li, X. Collaborative localization with received signal strength in wireless sensor networks. IEEE Trans. Veh. Technol. 2007, 56, 3807–3817. [Google Scholar]
- Rappaport, T.S. Wireless Communications: Principles and Practice, 2nd ed.; Prentice Hall PTR: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Pahlavan, K.; Li, X.; Ylianttila, M.; Chana, R.; Latva-aho, M. An overview of wireless indoor geolocation techniques and systems. In IFIP International Conference on Mobile and Wireless Communication Networks; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- Pahlavan, K.; Li, X.; Makela, J.-P. Indoor geolocation science and technology. IEEE Commun. Mag. 2002, 40, 112–118. [Google Scholar] [CrossRef]
- Al Nuaimi, K.; Kamel, H. A survey of indoor positioning systems and algorithms. In Proceedings of the International Conference on Innovations in Information Technology, Abu Dhabi, United Arab Emirates, 25–27 April 2011. [Google Scholar]
- Yang, C.; Shao, H.-R. WiFi-based indoor positioning. IEEE Commun. Mag. 2015, 53, 150–157. [Google Scholar] [CrossRef]
- Liu, F.; Liu, J.; Yin, Y.; Wang, W.; Hu, D.; Chen, P.; Niu, Q. Survey on WiFi-based indoor positioning techniques. IET Commun. 2020, 14, 1372–1383. [Google Scholar] [CrossRef]
- Nikoukar, A.; Abboud, M.; Samadi, B.; Güneş, M.; Dezfouli, B. Empirical analysis and modeling of Bluetooth low-energy (BLE) advertisement channels. In Proceedings of the 2018 17th Annual Mediterranean Ad Hoc Networking Workshop (Med-Hoc-Net), Capri, Italy, 20–22 June 2018. [Google Scholar]
- Paterna, V.C.; Auge, A.C.; Aspas, J.P.; Bullones, M.A.P. A Bluetooth Low Energy indoor positioning system with channel diversity, weighted trilateration and Kalman filtering. Sensors 2017, 17, 2927. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, B.; Liu, J.; Sun, W.; Yang, F. A robust indoor positioning method based on Bluetooth Low Energy with separate channel information. Sensors 2019, 19, 3487. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zanella, A.; Bardella, A. RSS-based ranging by multichannel RSS averaging. IEEE Wirel. Commun. Lett. 2014, 3, 10–13. [Google Scholar] [CrossRef]
- Akl, R.; Tummala, D.; Li, X. Indoor propagation modeling at 2.4 GHz for IEEE 802.11 networks . In Proceedings of the International Multi-Conference on Wireless and Optical Communications, Banff, AB, Canada, 3–5 July 2006. [Google Scholar]
- Pahlavan, K.; Levesque, A.H. Wireless Information Networks; John Wiley & Sons: Hoboken, NJ, USA, 1995. [Google Scholar]
- Li, X.; Pahlavan, K. Super-resolution TOA estimation with diversity for indoor geolocation. IEEE Trans. Wirel. Commun. 2004, 3, 224–234. [Google Scholar] [CrossRef]
- Torvmark, K. Three flavors of Bluetooth: Which one to choose? In Texas Instruments White Paper; Texas Instruments: Dallas, TX, USA, 2014. [Google Scholar]
- Hernandez-Solana, A.; Perez-Diaz-de-Cerio, D.; Garcia-Lozano, M.; Bardaji, A.V.; Valenzuela, J.-L. Bluetooth Mesh Analysis, Issues, and Challenges. IEEE Access 2020, 8, 53784–53800. [Google Scholar] [CrossRef]
- Mackey, A.; Spachos, P. Performance evaluation of beacons for indoor localization in smart buildings. In Proceedings of the IEEE Global Conference on Signal and Information Processing (GlobalSIP), Montreal, QC, Canada, 14–16 November 2017. [Google Scholar]
- Espressif, ESP32-DevKitC v4 Getting Started Guide. ESP-IDF Programming Guide. 2020. Available online: https://docs.espressif.com/projects/esp-idf/en/latest/esp32/hw-reference/esp32/get-started-devkitc.html (accessed on 1 November 2020).
- Espressif, ESP-BLE-MESH Architecture. ESP-IDF Programming Guide. 2020. Available online: https://docs.espressif.com/projects/esp-idf/en/latest/esp32/ (accessed on 1 November 2020).
- Bluetooth SIG. Mesh Profile, Revision v1.0.1, Bluetooth Specification 2019. Available online: https://www.bluetooth.com/specifications/specs/mesh-profile-1-0-1/ (accessed on 1 November 2020).
- Li, X. Collaborative multi-sensor tracking in mobile wireless sensor networks. Int. J. Sens. Netw. 2010, 8, 233–246. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Channel 37 | −37 | 2.13 | 5.95 | 6.55 | 7.40 |
| Channel 38 | −35 | 2.25 | 6.50 | 6.49 | 5.63 |
| Channel 39 | −29 | 2.37 | 7.21 | 6.24 | 5.86 |
| All channels | −35 | 1.91 | 6.97 | 7.79 | 7.18 |
| Channel 37 | −37 | 2.14 | 5.90 | 6.98 | 7.17 |
| Channel 38 | −35 | 2.28 | 6.48 | 6.59 | 5.39 |
| Channel 39 | −29 | 2.42 | 7.40 | 5.98 | 5.68 |
| All channels | −35 | 2.18 | 6.10 | 6.14 | 4.06 |
| Channel 37 | −36 | 2.13 | 3.02 | 7.03 | 4.67 |
| Channel 38 | −35 | 2.08 | 3.66 | 6.67 | 4.41 |
| Channel 39 | −29 | 2.30 | 4.03 | 6.35 | 4.86 |
| All channels | −35 | 2.02 | 4.87 | 7.26 | 5.24 |
| Channel 37 | −36 | 2.13 | 3.32 | 7.21 | 5.00 |
| Channel 38 | −35 | 2.11 | 3.54 | 6.47 | 4.71 |
| Channel 39 | −29 | 2.30 | 3.93 | 6.55 | 5.06 |
| All channels | −35 | 1.92 | 2.75 | 6.78 | 4.35 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, Y.; Kandula, H.; Li, X. Measurement and Analysis of RSS Using Bluetooth Mesh Network for Localization Applications. Network 2021, 1, 315-334. https://doi.org/10.3390/network1030018
Cao Y, Kandula H, Li X. Measurement and Analysis of RSS Using Bluetooth Mesh Network for Localization Applications. Network. 2021; 1(3):315-334. https://doi.org/10.3390/network1030018
Chicago/Turabian StyleCao, Yuan, Harsha Kandula, and Xinrong Li. 2021. "Measurement and Analysis of RSS Using Bluetooth Mesh Network for Localization Applications" Network 1, no. 3: 315-334. https://doi.org/10.3390/network1030018
APA StyleCao, Y., Kandula, H., & Li, X. (2021). Measurement and Analysis of RSS Using Bluetooth Mesh Network for Localization Applications. Network, 1(3), 315-334. https://doi.org/10.3390/network1030018