1. Introduction: Magnetic Island Chains with Three Stable State
Arrays of magnetic islands on nonmagnetic substrates include two-dimensional artificial spin ice (ASI) [
1,
2] and linear dipole-coupled chains [
3,
4], that have attracted significant research interest associated with frustration effects caused by competition between shape anisotropy and dipole interactions [
5,
6]. In the case of square lattice ASI, the ground state exhibits dipoles alternating from site to site [
7] along both principal axes, but with zero net magnetization. There is also an excited remanent state [
8,
9] achieved by removal of an applied field, which has metastable non-zero magnetization along a diagonal direction. These states have been studied [
8,
9,
10,
11] for the small amplitude oscillations that would be present on top of their structures, which could be responsible for destabilizing them. By assuming the
nth island has a dipole moment
of fixed magnitude
but with varying direction vector
(known as a macrospin approximation [
12]), an effective Heisenberg model [
13] can be used to determine the approximate dynamics.
In earlier work [
14], I considered a model for a dipole-coupled chain of thin islands whose long axes (along
) are oriented perpendicular to the chain direction (along
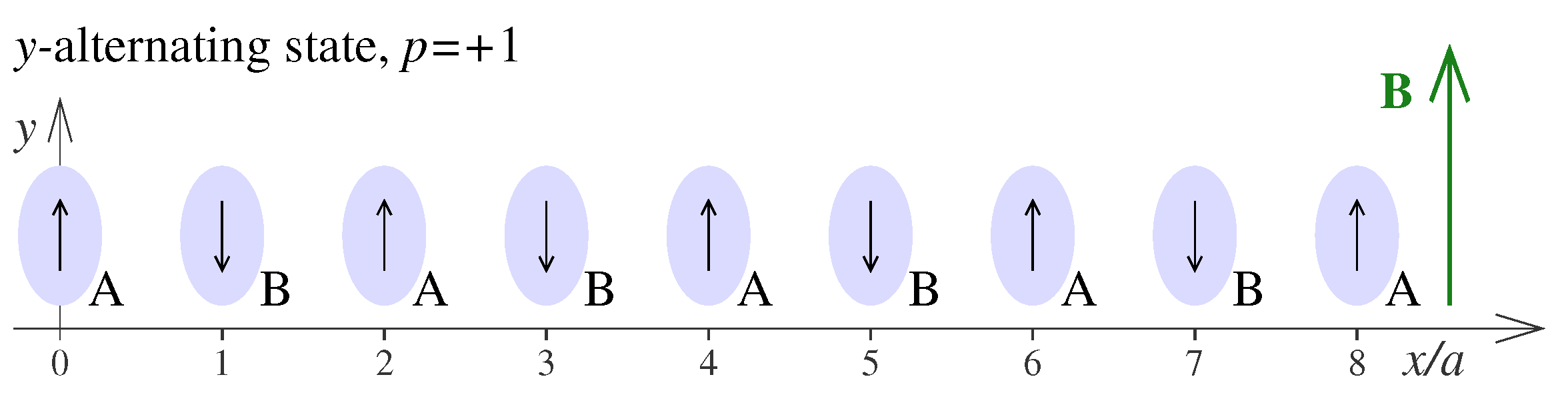
), which has some states reminiscent of those in square ASI. The chain is depicted in
Figure 1. The islands have an elongated profile (elliptical or similar) in the
-plane and a smaller thickness
in the out-of-plane
z-direction. Shape anisotropy gives an island both easy-axis anisotropy (energy constant
) and easy-plane anisotropy (energy constant
), that compete with long-range dipolar interactions and an applied field.
The main goal of this study is to determine how the possible metastable states influence the system magnetization as a function of a magnetic field
B applied transverse to the chain. These phenomena could apply to chains of general island-like systems, such as patterned elements of Permalloy [
15] or other media, Co
2C nanoparticles [
16], Fe nanoparticles [
17] and nanoparticle assemblies [
18], and biomineralized magnetosomes [
19]. With changes in island shape, spacing, and orientation, it may be possible to design engineered media with desired magnetic responses.
The macrospin approximation [
12] is used for the island dipoles at temperature
, where the magnetic dipole magnitude
is the product of the zero-temperature saturation magnetization and the island’s volume. The thin islands under consideration have a large surface-area-to-volume ratio, which could imply a reduction in the dipole moment due to magnetic dead layers [
20,
21,
22] around 1 nm thick at the surfaces. This effect is ignored here, which should be a good approximation for large enough islands. At very small island sizes, the effective dipole magnitude
will be reduced due to any dead layers and this may affect the field values where transitions between states take place, but not the general conclusions about which transitions take place.
Without an applied field, there are three types of uniform states possible [
14], each with out-of-plane components
and two polarizations: (1) Two
x-parallel states with all dipoles polarized along either
or
, with minimized dipolar energy and high
anisotropy energy; (2) Two
y-parallel states with all dipoles polarized along either
or
, with minimized anisotropy energy while dipolar energy is high; and (3) Two
y-alternating states, as depicted in
Figure 1, with dipoles along
but alternating at every site, where the nearest-neighbor (NN) dipolar energy is low and the anisotropy energy is minimized. The
y-alternating states are the one-dimensional analogues of the site-by-site alternating ground state of square ASI; the
y-parallel states are the one-dimensional analogues of remanent states of square ASI. For brevity, I will refer to
x-parallel as
x-par,
y-parallel as
y-par, and
y-alternating as
y-alt.
With a nonzero transverse applied field,
, the dipoles of
x-par states are tilted by some oblique in-plane angle [
23] towards the field direction, pointing between the chain direction and the field direction. Hence, the states are renamed
oblique states. The field also strongly affects the
y-par states, because the one polarized parallel to the field becomes lower in energy than the one polarized opposite to the field. For oblique and
y-alt states, the two possible polarizations have the same energies and stability properties.
As the applied field is varied, the stability properties of these states can change, and that will be reflected in the magnetization as a function of the applied field. Stability was identified in Refs. [
14,
23] by the absence of zero-frequency or imaginary-frequency normal modes of oscillation, for the whole range of allowed wave vectors. Stability is found to be unaffected by the easy-plane anisotropy constant
, as long as it is non-negative. With changing
or
B, a particular state can change from stable to
metastable or
unstable.
Here, unstable means that there is at least one wave vector whose oscillation frequency is not positive; it could be zero, negative or even have an imaginary part. Typically, an unstable state has a range of wave vectors whose mode frequencies are non-positive. It is not possible for the state to exist for more than a brief instant, as it will quickly deform to some stable configuration.
I take metastable to mean that a state is locally stable against small-amplitude oscillations, with only positive mode frequencies; however, there exists at least one other stable state of lower energy. By this definition, any metastable state can co-exist with other stable states, but it is in danger of becoming unstable when the system parameters change. To the contrary, if a change in the system parameters lowers its energy, that could make it become the lowest energy stable state. Parameters where a metastable state becomes unstable will correspond to state transitions in magnetization curves. Thus, the analysis of the metastability properties of these states is used to characterize the magnetic responses.
The paper is organized as follows: First, the model is further described and the energies and stability regions in the parameter space will be summarized for the three types of states. That is followed by a discussion of the possible allowed transitions among the states that can take place as B changes. That will be facilitated by an effective two-sublattice potential for the system. Based on those possible transitions, examples of magnetization curves will be obtained and compared for different ranges of the easy-axis anisotropy constant . The parameters , and an NN-dipolar constant D will be estimated for some different choices of island geometry and magnetic materials.
2. Methods: The Model for a Linear Chain of Magnetic Islands
The islands have dipoles
, where the unit direction vectors are expressed in Cartesian or in planar spherical coordinates with an in-plane angle
and an out-of-plane angle
,
As the islands are thin compared to their dimensions in the
-plane, they have easy-plane anisotropy with energy parameter
. Their elongation perpendicular to the chain direction gives them easy-axis anisotropy with energy parameter
. The anisotropy energy of an island is taken to be
Dipoles interact with a uniform magnetic field
applied transverse to the chain direction, with energy contribution,
The dipole pair interaction between dipoles at sites
n and
has energy
where
D is the nearest neighbor (NN) dipolar energy constant, defined from the permeability of space
, the dipole magnitude
, and their NN separation
a,
Then, the Hamiltonian for a chain of
N dipoles is taken as
An upper limit
on the dipole sum is the range of the dipole interactions.
gives the NN model, and
is referred to as the long-range-dipole (LRD) model. For numerical results in this work, we take
. The calculations are similar for finite
R and only result in a rescaling of frequencies and slight changes in stability limits.
The average of the summand over
n in expression (
6) is the energy per site,
Where convenient, the energies
,
,
, and
U are represented in dimensionless form by dividing by the dipolar energy constant
D. Those scaled energies are written using lower case symbols:
2.1. Energy and Stability Limits of Oblique States
In Ref. [
23], the stability limits and energies of the three types of uniform states were evaluated, all with global out-of-plane angle
. The state properties are summarized here.
First, oblique states are characterized by having dipoles tilted uniformly from the
axis, with uniform spin components
along the magnetic field direction,
This depends on dipole interactions out to range
R, involving a finite zeta-function sum,
That sum is the zero wave vector (
) limit of a truncated Clausen function [
24,
25],
Of most interest is
, in which case,
. The scaled per-site energy of the oblique states was found to be
As mentioned earlier, there are two degenerate oblique states, depending on whether the components
are either positive (
) or negative (
), as Equation (
9) has two solutions for the oblique angle,
.
At an upper-limiting scaled field
,
reaches its maximum value,
, which occurs at
The parameter region for the stability of oblique states is indicated in the
plane in
Figure 2. The maximum field
, shown as a solid red line in
Figure 2, is where the oblique states become identical to a
y-par state polarized in the field direction. An oscillatory mode at
goes to zero frequency at this field. Oblique states are unstable beyond this limit.
There is also a minimum field required for stability, associated with oscillations at
, given by
The expression requires
and
, or
for the LRD model, The minimum field in (
14) is represented as a solid blue curve in
Figure 2. If
is below
, no minimum applied field is needed for stability. If the field is below
, the calculations in Ref. [
23] showed that only
y-alt states would be stable in this anisotropy range. Note that
and
do not depend on
. Oblique states are stable predominantly for low
anisotropy, but also in the range given in Equation (
15) (yellow region in
Figure 2), where the field works to stabilize oblique states.
2.2. Energy and Stability Limits of y-Par States
For
y-par states, the polarization choices
lead to two possible uniform spin configurations,
The per-site energies are different, because the spins are aligned with
B for one polarization but antialigned to
B for the other polarization. With
being the
y-component, the per-site energy is
The state polarized along
B has lower energy, and better stability. The product
selects which polarization has lower energy. Both
p and
b can be allowed to be positive or negative.
With , the two y-par states are not equivalent and they need to be clearly distinguished in the discussion. As a result, the polarization will now be referred to as the state and the polarization as the state. For consistency, these names are used regardless of whether b is positive or negative.
Small oscillations go unstable when the energy eigenvalue
associated with small in-plane fluctuations becomes negative at some wave vector
q. That eigenvalue in units of
D was found to be
Conversely, stability for these states requires positivity of
. One sees that
is the most unstable point because that gives the maximum Clausen sum and the lowest eigenvalue. The particular Clausen sums [
24,
25] at
and at
, together with their LRD limits are
Enforcing the
requirement,
, gives an inequality that applies to both polarizations,
Enforcing the
requirement,
, gives a result,
The restriction (
20) at
has the greater value on the right hand side; it decides stability. If (
20) is satisfied, then the relation (
21) from
is satisfied. There is no dependence on
. Then, for stable
states, the field must satisfy
The minimum field in (
22) is a solid red line in the
-plane in
Figure 2 (same as the maximum field for oblique states). For stable
states, the inequality is reversed,
The maximum field in (
23) is a solid magenta line in
Figure 2. The stable regions for
y-par states are shown in green and turquoise shading in
Figure 2.
Because the instability takes place with a fluctuation, the y-par states can destabilize only into oblique states or into the y-par state of the opposite polarization.
2.3. Energy and Stability Limits of y-Alt States
The in-plane angles for the two polarizations of
y-alt states are
Sites with even (odd)
n comprise the A (B) sublattice, whose spins point in opposite directions as in
Figure 1. The states have no net magnetization, but rather,
p refers to two choices of alternating order. I avoid calling it antiferromagnetic, however, because the cause is NN-dipole interactions, not exchange interactions. The scaled per-site energies are independent of the field,
where the sums over even
l (AA and BB bonds) and odd
l (AB bonds) can be performed separately to obtain this.
It is physically obvious that a strong enough field will destabilize a
y-alt state and convert it to one of the
y-par polarizations when the field energy dominates the NN-dipolar energy. A two-sublattice calculation of the small-amplitude oscillations relative to a
y-alt state [
23] found that stability requires
with no dependence on
. The maximum field in expression (
26) is depicted in the
-plane in
Figure 2 as a solid green curve.
For all three types of planar states (all ), affects the oscillation frequencies, but not the field values where a mode acquires zero frequency.
The
y-alt calculation showed that at the limiting field, zero-frequency oscillatory modes appear together at
and
. This suggests that the oscillations physically will connect either to the opposite
y-alt state (connected by a
rotation at
of all the spins) or to a
y-par state (connected by a
rotation at
). Below the maximum field in (
26), the
y-alt states coexist with
y-par states in one region where they are stable, and with oblique states in their stable region. Below the minimum
b needed for oblique stability, Equation (
14),
y-alt is the only stable state. That is, the exclusive region for
y-alt states is
This applies in the window
. The region in the
-plane is shown in
Figure 2 with pink shading. A dashed black curve shows where
y-alt and oblique states have the same per-site energy. The dashed straight black line at
shows where
y-alt has the same per-site energy as the
state.
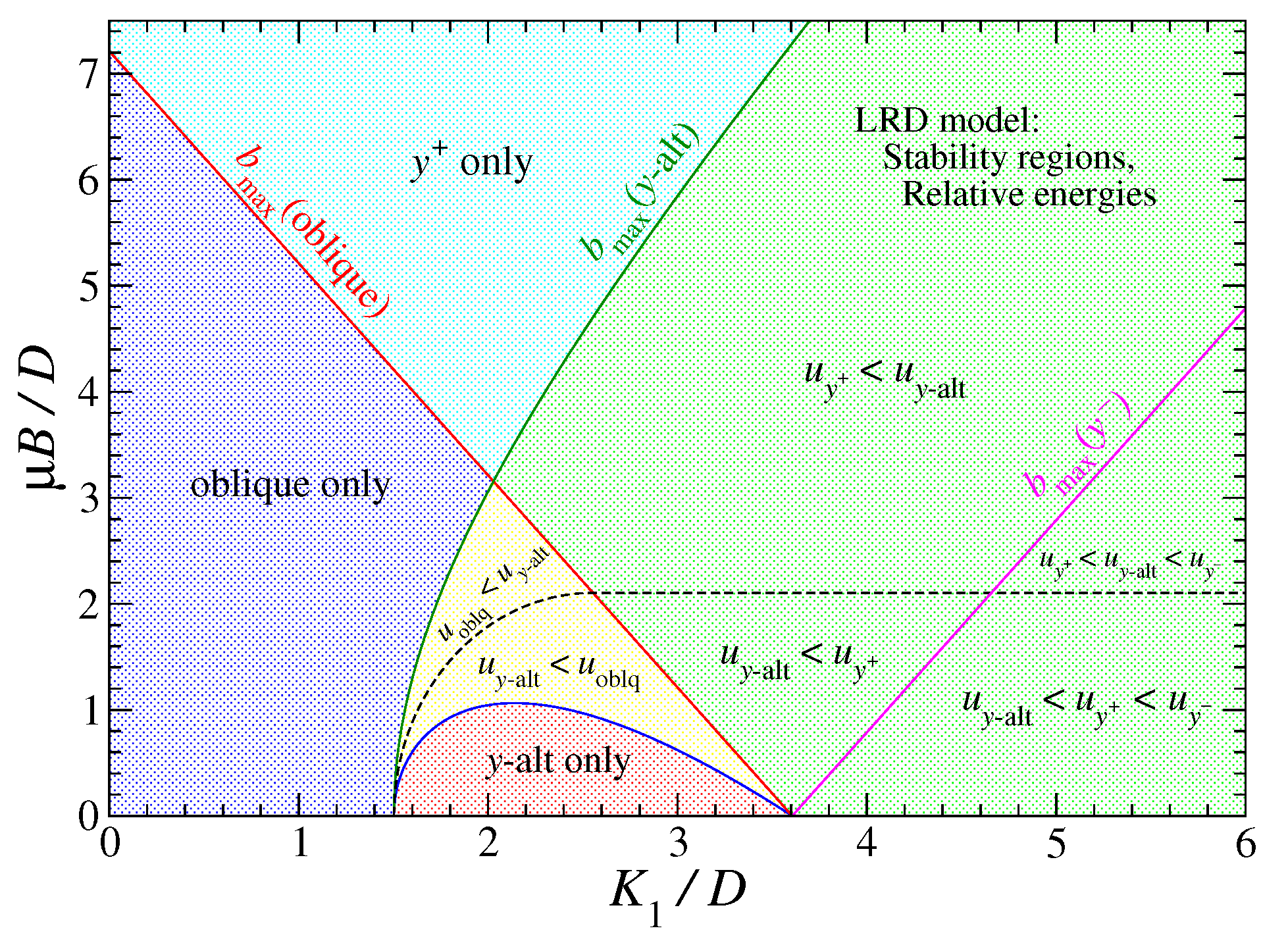
2.4. Stable and Metastable Regions in the Anisotropy/Field Diagram
Figure 2 summarizes the stability regions for each of the three types of states, in the (anisotropy,field)-plane for
. The diagram can be symmetrically mirrored for
while interchanging the
and
labels.
Each type of state has an exclusive region where it is the only stable state: oblique for low anisotropy and low field (purple shading), at high positive field (turquoise shading), at high negative field (would be in the region), and y-alt for and low field strength (pink shading).
In other regions, two or more states coexist in stable form. For those regions, the inequalities indicate the ranking of the per-site energies u for the different states. In the case of y-par and y-alt states, there is even a region in the lower-right area of the plot where three possibilities coexist. A black dashed line shows where y-alt has the same per-site energy as oblique in one region and y-par in a second region.
In regions with more than one stable state, one has the minimum energy while the others are metastable. If one considers changes in applied field b for mapping out the magnetization response, the diagram helps to indicate the possible final states when one of the stability limit curves (in solid colors) is crossed. That is considered next.
4. Transitions Using an Effective Two-Sublattice Potential
To accommodate the y-alt states, the in-plane angles are now assumed to be uniform on each of two sublattices. The sites with even (odd) n define the A (B) sublattice, and their in-plane angles will be (). The effective system potential in this set of coordinates has features that indicate paths for transitions between pairs of oblique, y-par, and y-alt states, while keeping the planar assumption, for all sites.
4.1. Dipole Interactions
The dipolar pair interactions in Equation (
4) can be either AA bonds or AB bonds. For an AA bond,
, where
l is an even nonzero number. The dipolar pair energy from (
4) is
The same form applies to BB bonds,
For the inter-lattice AB or BA bonds with
l being odd, a pair contributes
I want the average per-site contribution to the energy. Sitting at an A-site, the total dipolar energy is found by summing over all
. Summing over all even
n would then account for all possible AA and AB dipole pairs. Half of the summed terms are AA and half are AB. So, an A-site’s average dipolar energy contribution is
This involves the even/odd sums,
That gives the average dipole energy per A-site,
The same expression applies to the dipole energy per B-site,
, interchanging A and B symbols. We want the average for any site, whether A or B, which means the average of
and
. In units of
D, the scaled dipole energy is
or
4.2. The Effective Two-Sublattice Potential
In addition to dipolar energies, there are also anisotropy and applied field terms, which are averaged over the sublattices. The scaled anisotropy energy is
The scaled applied field energy is
The total effective potential is then the sum,
One can check that expression (
40) reverts to the uniform rotation effective potential in Equation (
28) when the sublattice angles are equal.
Plots of the potential and its contours will be used to describe some possible transitions between states. It is also helpful to know its gradient function, .
The effective two-sublattice potential gives a simplified version of the energetics, i.e., in a limited region of the full phase space. Even so, it should contain the basic energetics needed to describe transformations among y-par, oblique, and y-alt states at zero temperature. Supposing that the system has small damping, the dynamics will take it from the current state in the direction in phase space that has the highest downward change in energy. Thus, it is assumed that if the system starts in a metastable state and then a parameter such as b is changed, the phase point of the system will move in the direction of the negative gradient of the potential, .
The size of the gradient changes greatly over the relevant range of angles. Therefore, it is also helpful to define a
flow field,
which shows a vector field of negative gradient arrows of fixed length. The system point will tend to move in the direction of
. Views of the surface
, its contours, and the flow field give a good representation of where the system is likely to move in the limited phase space of
. These are applied to three examples of the potential at different relative anisotropies
and fields
b, that correspond to transitions of interest when the field changes. The examples aid in the construction of magnetization curves vs. the applied field.
4.3. Low Anisotropy: Oblique vs. y-Par States
Consider first a simple case with
and applied field
. These are parameters where only an oblique state should be stable. The energy surface
and contour plot are shown in
Figure 5. The stable oblique state is clearly contained inside the (red) contour near
, with
, and it is the only minimum over the range of angles shown. Due to symmetry, there is no need to show angles greater than
in magnitude, although the other oblique state would be found there. The
y-par and
y-alt states are located at the corners of the range shown, and they are all unstable points in the potential. Plots of the gradient and flow field are not needed here to see that the system would move towards this oblique state, if initiated elsewhere in the phase space. If the applied field is increased to
, the minimum of the potential moves to
, i.e., the oblique state destabilizes into the
state.
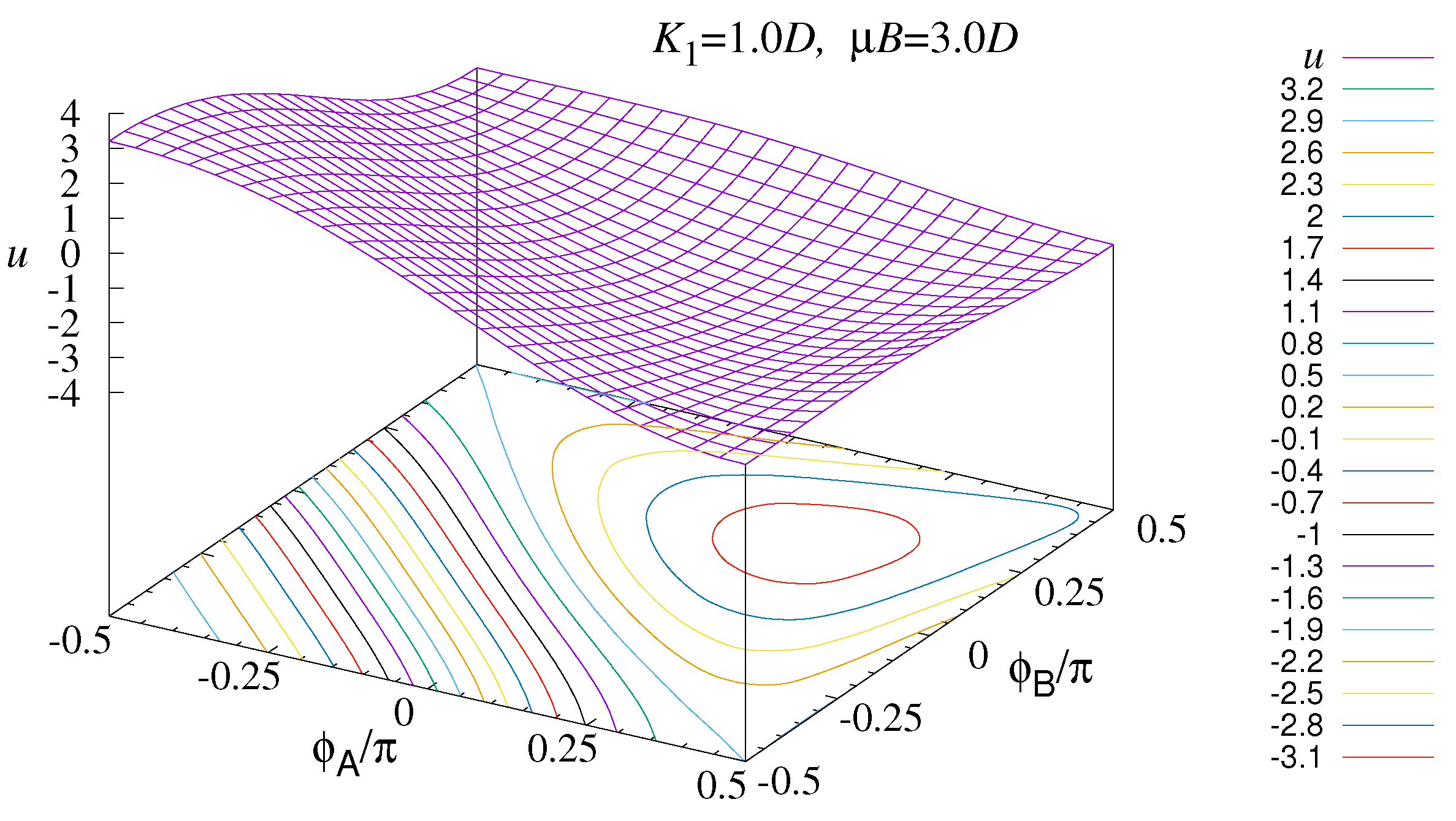
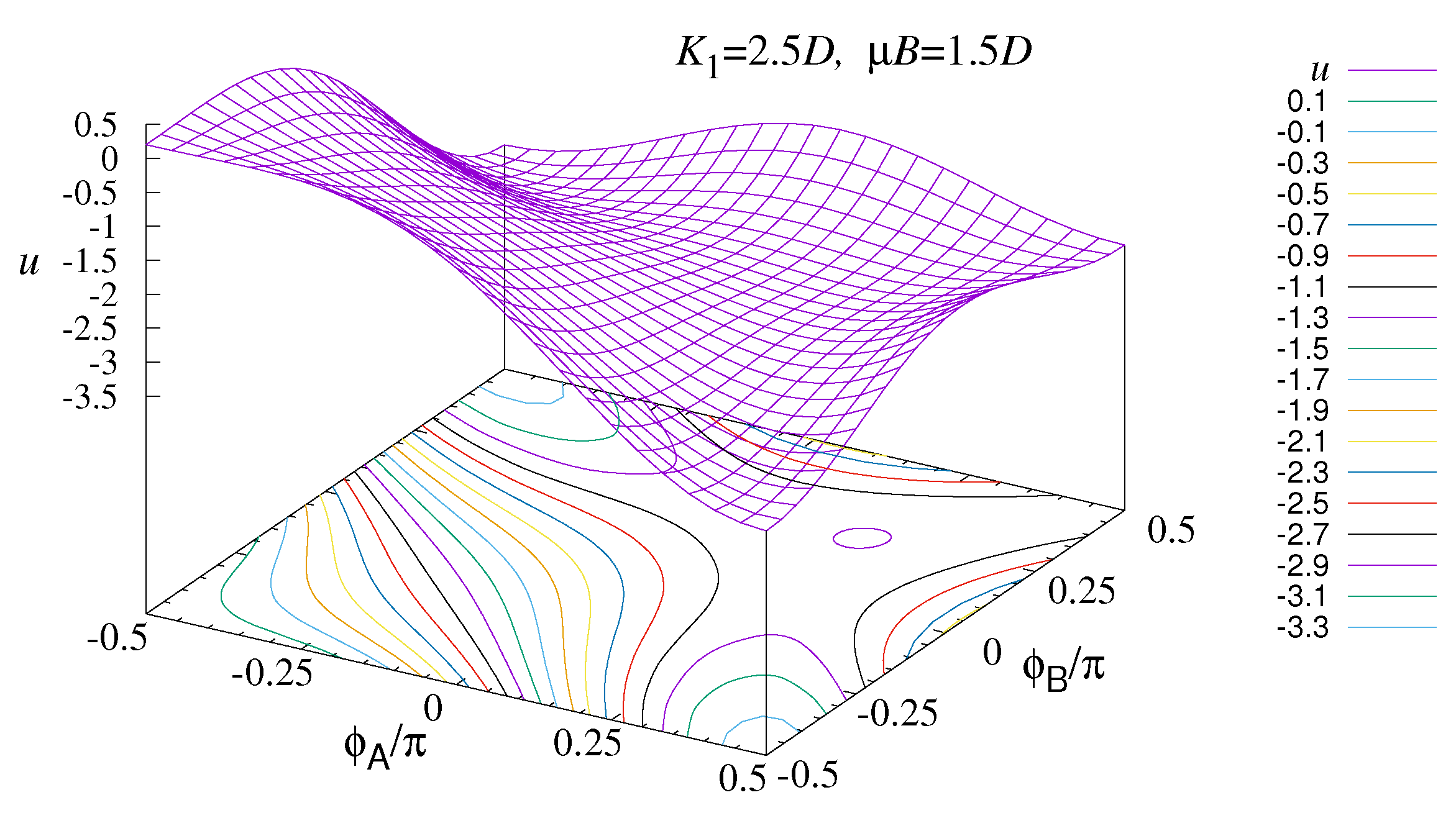
4.4. Intermediate Anisotropy: Oblique and y-Alt vs. y-Par States
The next distinct case is in a parameter region where oblique and
y-alt coexist, while
y-par is unstable. Considering
,
, the energy surface and its contour plot are shown in
Figure 6. This is in the yellow region of the
-plane in
Figure 2. There is an oblique state with a rather broad energy minimum around
. Both
y-par states at
are unstable local energy maxima. The two
y-alt states at the other corners of the angular range are stable local energy minima, and slightly lower in energy than the oblique state. This shows that the oblique state is metastable.
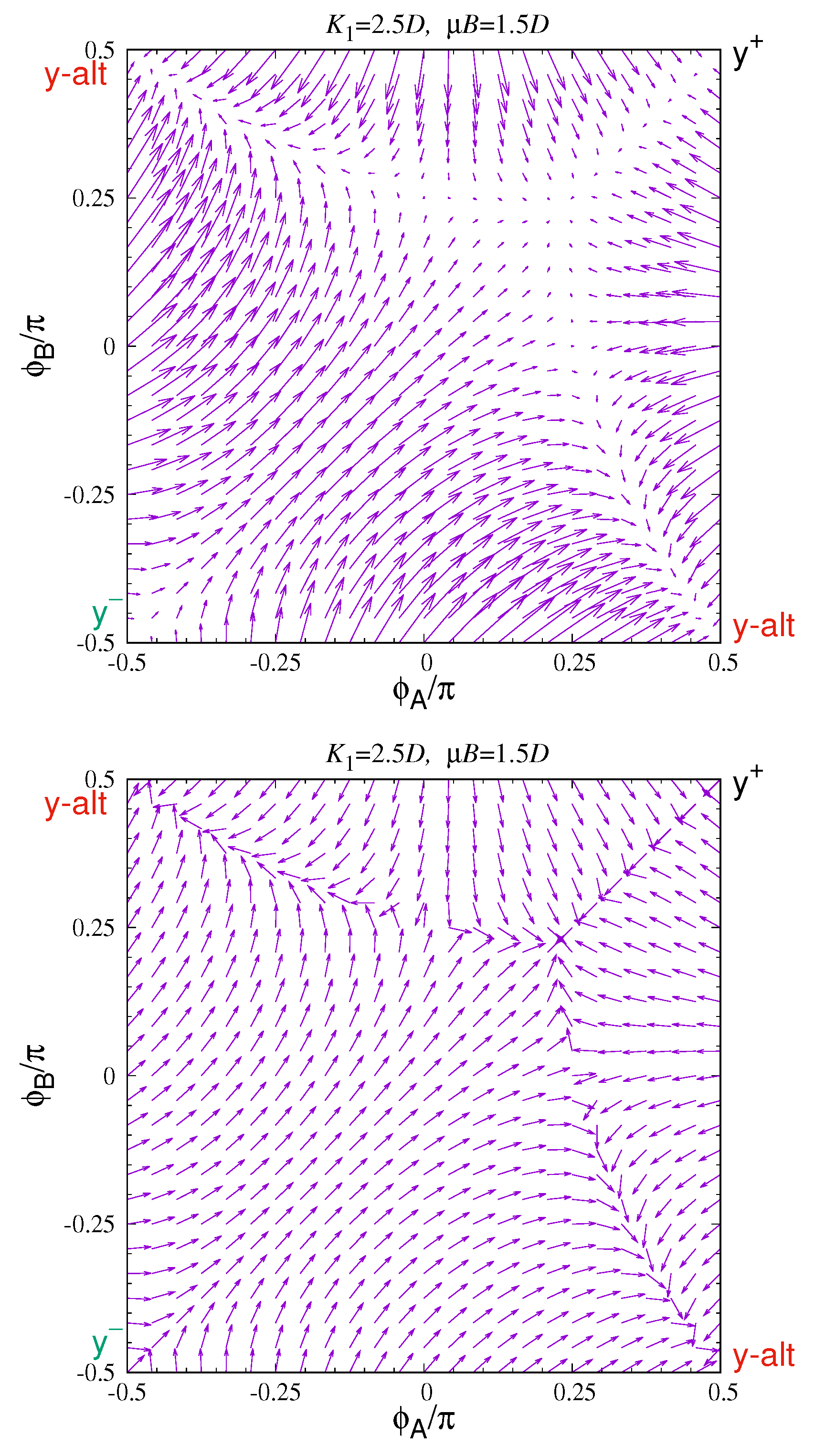
For comparison, the negative gradient and flow patterns are shown in
Figure 7. Taken together, these more clearly show the flow from
y-par states into the oblique state near
, where the gradient becomes weak, as indicated by short arrows there. Less clearly, starting from other locations, there is also flow into the
y-alt states at
. If
b had been slightly larger, say,
, the
state would have been stable, and the oblique state would be unstable, with
y-alt states still stable. Conversely, reducing
b towards zero will eventually eliminate the oblique state energy minimum, and the
y-alt states become the only stable states, as in the pink region in
Figure 2.
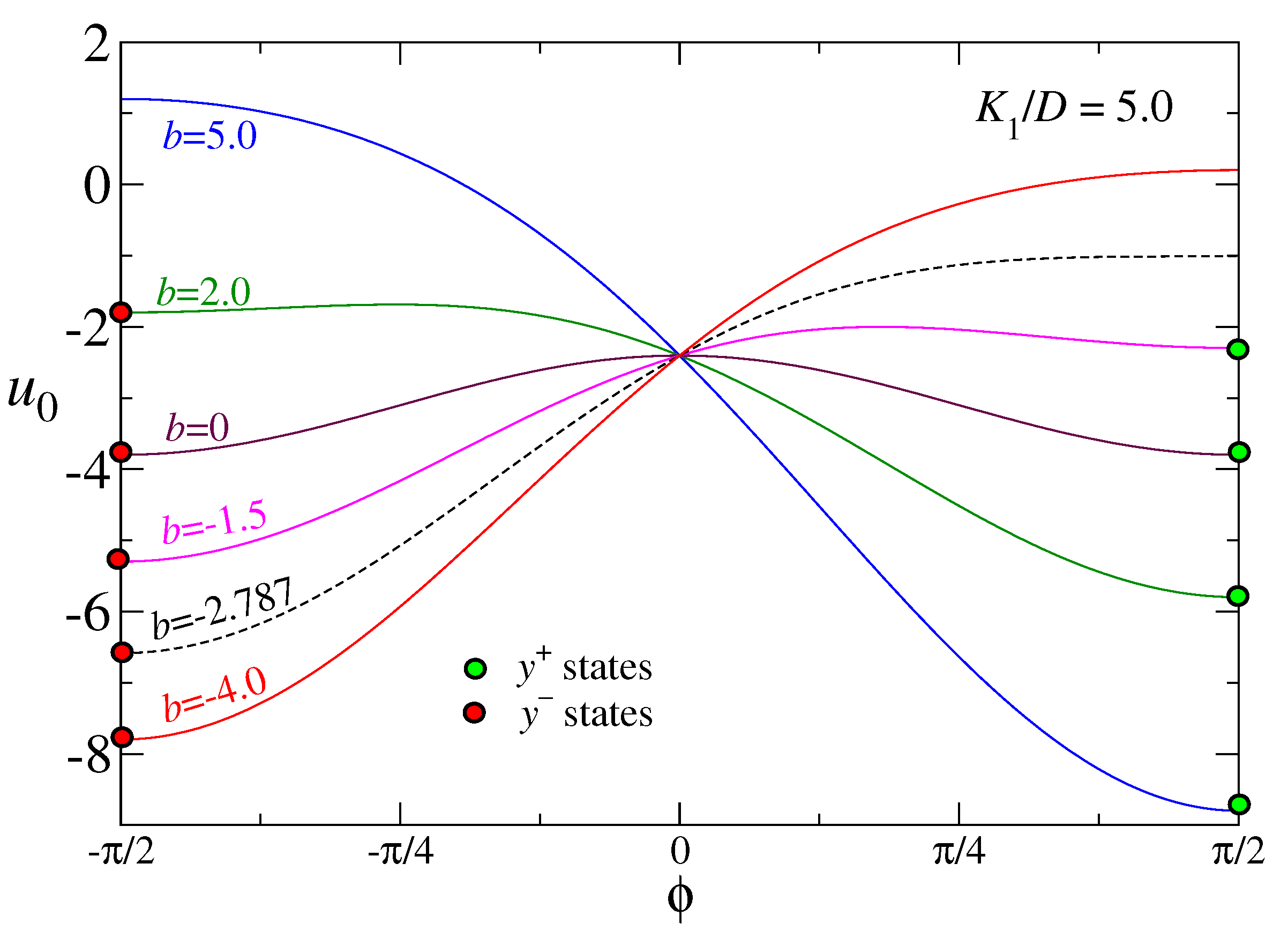
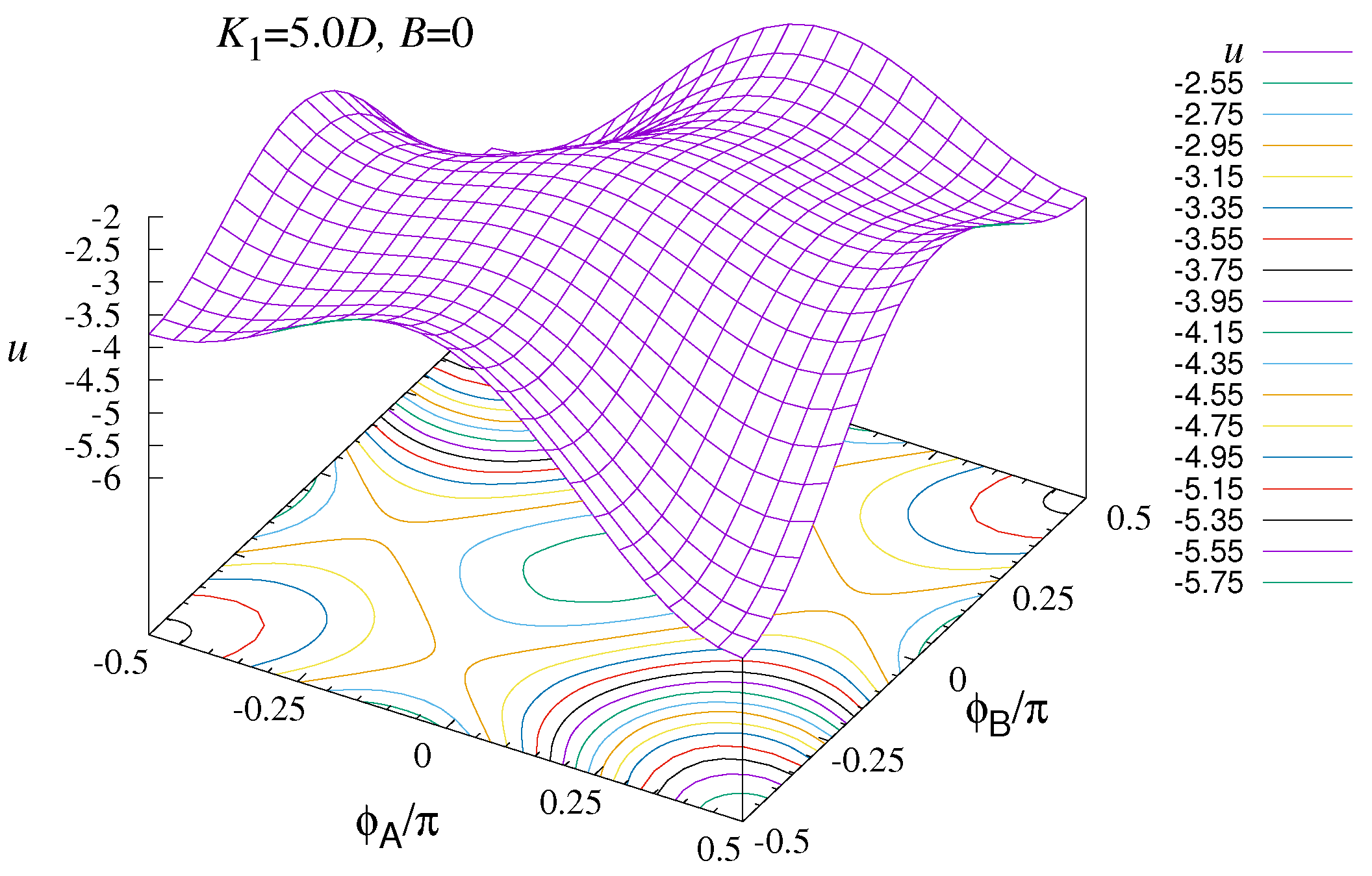
4.5. Larger Anisotropy: y-Par vs. y-Alt States
Consider now
for the LRD model. Only
,
and
y-alt states are possible for this anisotropy (see
Figure 2). The
state is stable for large positive fields
. If the system starts in
and then the field is reduced or reversed, at some point,
will be destabilized. That occurs at a negative (or reversed) field value, given by the limit in Equation (
22). That limiting value is indirectly represented in
Figure 2 as a magenta line for
; that line reflected to the negative
b direction is the negative field limit for a
state.
The question about the final state starting from was alluded to earlier: Upon reversing the applied field, as one does for a magnetization curve, will the final state be a or a y-alt state?
The instability of
is driven by a zero-frequency mode at
, where the two sublattice angles move together, i.e.,
. That is along a diagonal line in a plot in the
plane. The question about the true final state can be answered from the effective potential, its contours, and especially, the gradient and flow diagrams. To be specific, consider the case with
, for which the
state destabilizes when
, according to Equation (
22), and also verified in
Figure 4.
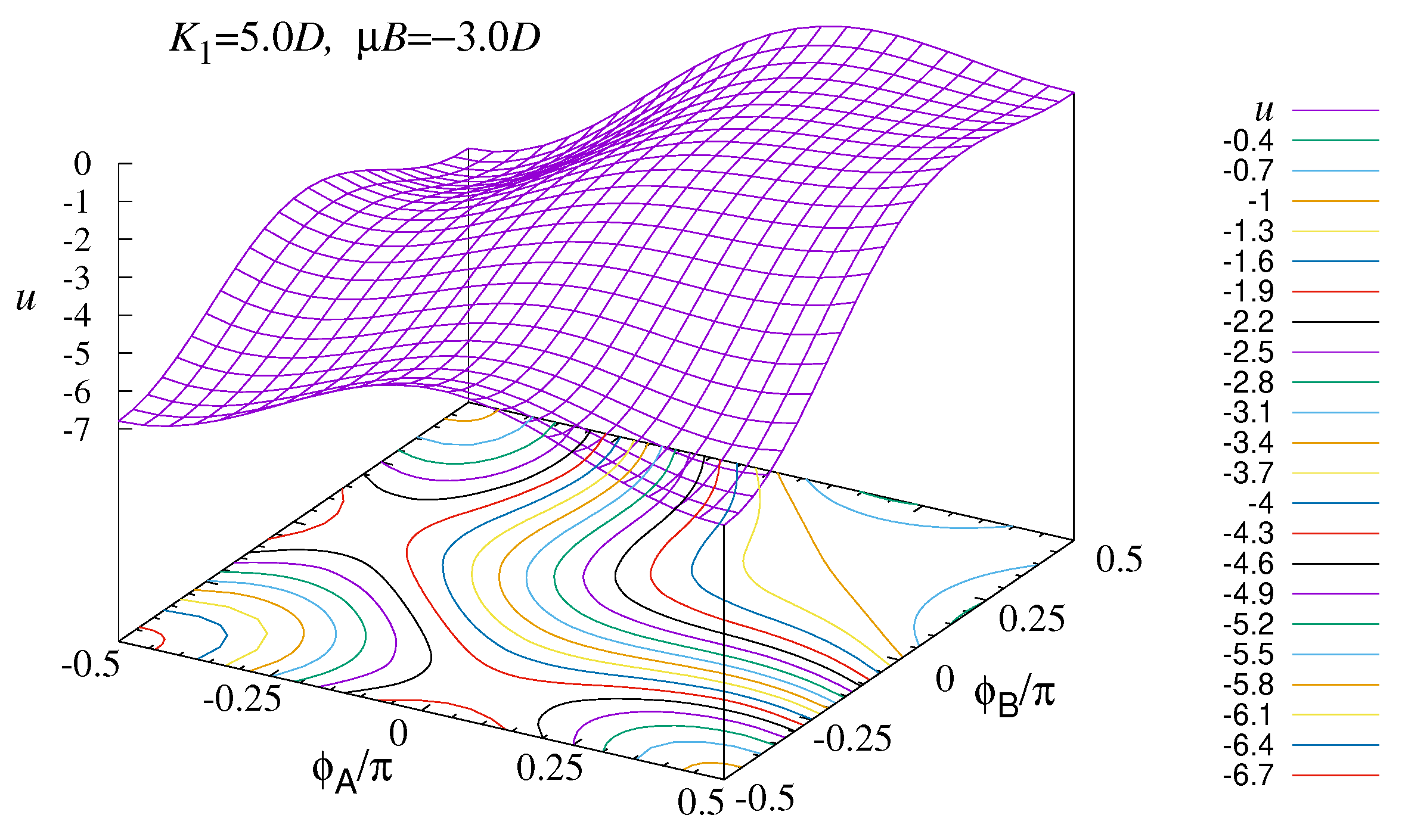
A plot of the potential
for field value
is adequate to see what is likely to happen after destabilization (it is minimally different than a plot with
) (see
Figure 8). The
state is actually the highest, with energy per site
, and clearly unstable as a local maximum. The
state at
is a local energy minimum, slightly lower in energy than the two
y-alt states with
, also a local minimum. From that figure alone, it looks possible for
to destabilize into either
or one of the
y-alt states.
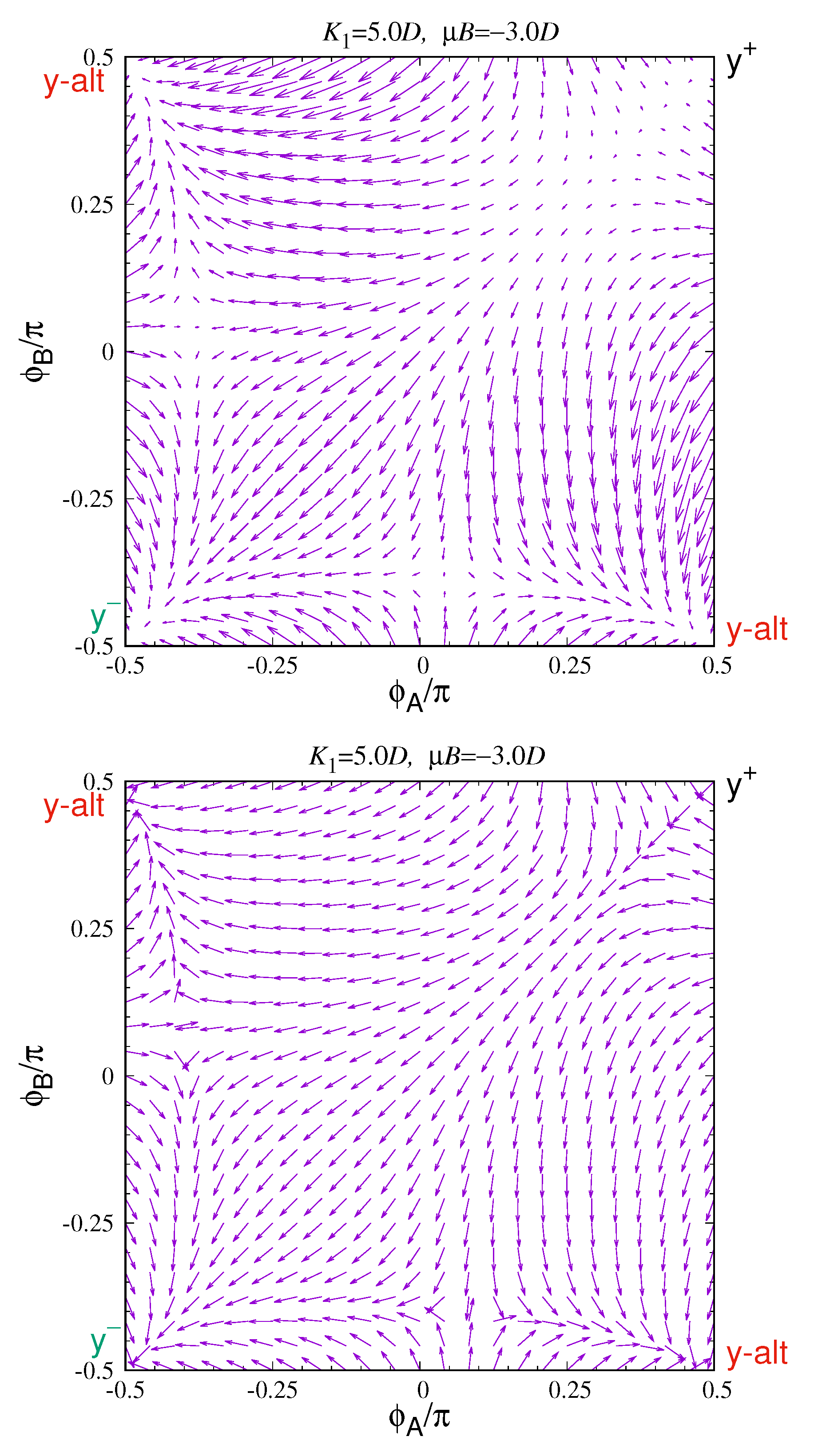
For another view, the gradient and flow pattern for
are plotted in
Figure 9. There, it becomes clear that starting from any points in a region around
, the flow will take the state point quickly into the uniform rotation line, where
, and from there it goes imperatively towards the
state. Note also the substantial saddles between the
and
y-alt states, that also help to separate the flow pattern. The system would have to start quite far from the
state, possibly due to a large fluctuation, in order to end up flowing to one of the
y-alt states. At zero temperature, when
destabilizes due to reversing the field, the system will transform into
.
Summarizing for large , the state at a reversed field will destabilize into the state, not into one of the y-alt states. Similarly, the state at a sufficient positive field will destabilize back into . The y-par states destabilize via a mode that connects one to the other. Based on these facts, it seems that it is difficult to move the system back into a y-alt state, at larger anisotropy, simply by changing the magnetic field.
5. Results: Zero-Temperature Magnetization Curves
The allowed transitions between the states directly influence the average magnetic moment
along the field direction, as a function of that field component
. For theoretical purposes, the average transverse spin component indicates the average magnetic moment per site, and is denoted
. Its saturation value is unity; multiplication by the dipole magnitude
converts it to physical units. The variation in
can be predicted as the applied field
is scanned through positive values and then negative values in a usual experiment for magnetic response. The field is assumed to start at
, with the system in its lowest energy state. The results depend strongly on the anisotropy strengths,
. A vertical line at the chosen
in the
-plane of
Figure 2 passes through different possible states. The sequence and stability limits of those states determine the magnetization curve. The system changes as the applied field decreases may not reverse the changes as the applied field increases, which makes hysteresis possible.
For this model, a zero-temperature non-equilibrium situation is assumed, while the applied field is changed slowly enough so that necessary energy dissipation can occur while magnetic oscillations are damped out. That does not mean the system is in the lowest energy state, but rather, it stays in any current local energy minimum state, even metastable ones, until changing the applied field causes that state to be destabilized into some other final state. At a field where destabilization occurs, the system is assumed to rapidly transform into another coexisting state that is (1) connected geometrically to the initial state by a zero-frequency fluctuation mode, and (2) the terminus of the downward energy flow pattern from the initial state.
The geometric condition (1) is the principle that the dipoles should move, typically at or , in a manner that rotates them towards the directions they would have in the final state. Condition (2) is even stronger; the downward energy flow must go to the actual final state, that has to be a stable energy minimum.
For this model to make sense, some damping must be assumed, as there needs to be a process to reduce the energy, besides any work that the applied field itself does on the system. Without damping, strong oscillations around the final state would have to take place, carrying the released energy. If that kinetic-like energy is not damped out and persists, the system does not settle down into the lower energy local minimum, but rather maintains precession-like oscillations around it.
Various examples at different anisotropies are discussed next, all with , for the LRD model.
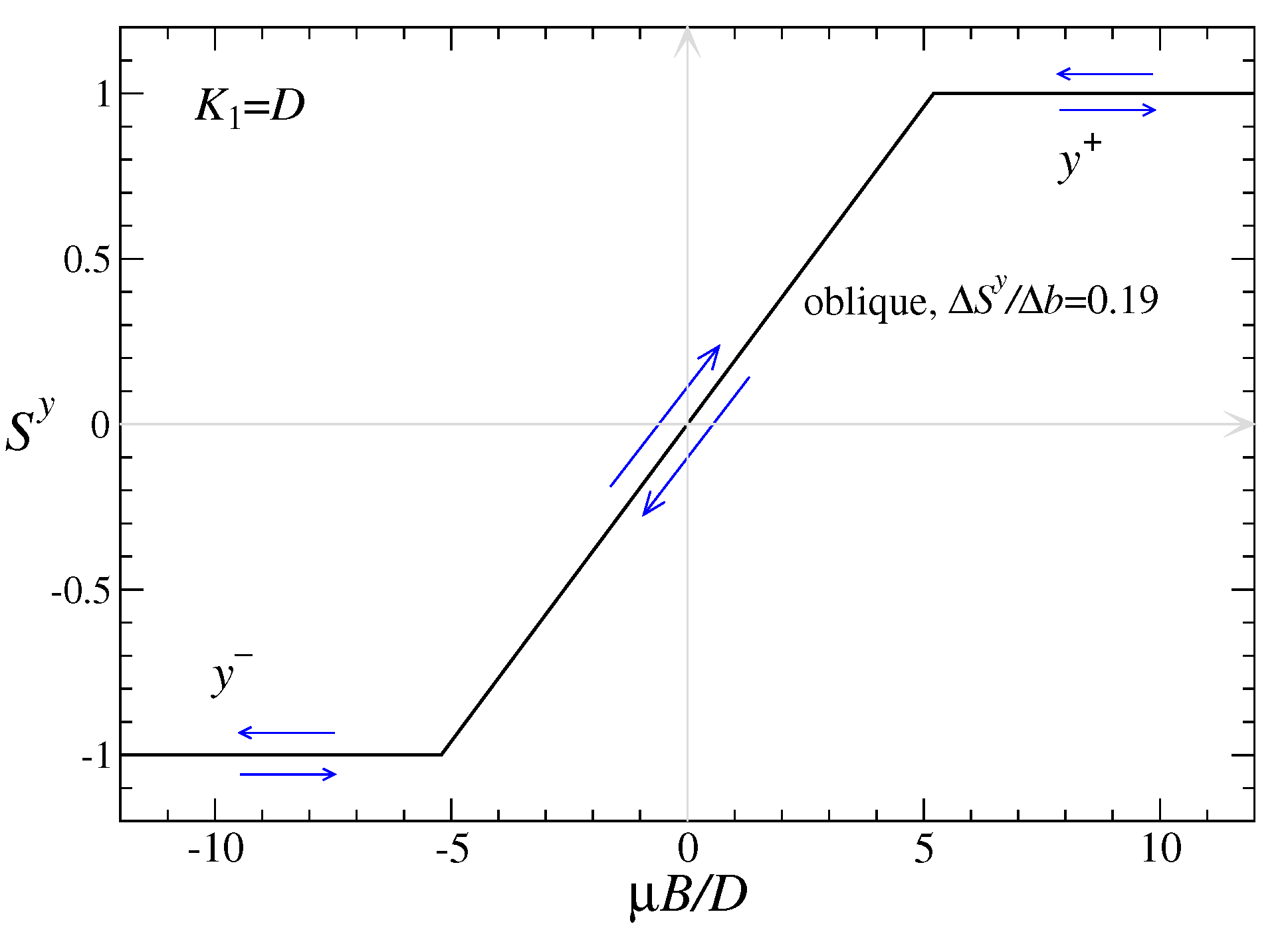
5.1. Magnetization Variations at Due to Oblique–y-Par Transitions
In the simplest example with
, the plot in
Figure 2 shows that only oblique and
y-par states are possible while
b varies. From Equation (
13), the maximum field strength below which oblique is the only stable state is
, and above which the system in in either
for
or
for
. At that limiting field, the magnetization saturates, and the tilt angle of the oblique state becomes
, i.e., oblique becomes one of the
y-par states. In the oblique state, the dimensionless magnetic moment per site
is given by Equation (
9), which varies linearly with
b. The resulting magnetization plot in
Figure 10 shows
versus
b. Once in one of the
y-par states, the magnetization stays saturated at
. There is no hysteresis, as the system switches reversibly between oblique and
y-par states. While in the oblique state, the system displays a relatively low magnetic susceptibility
, in dimensionless units.
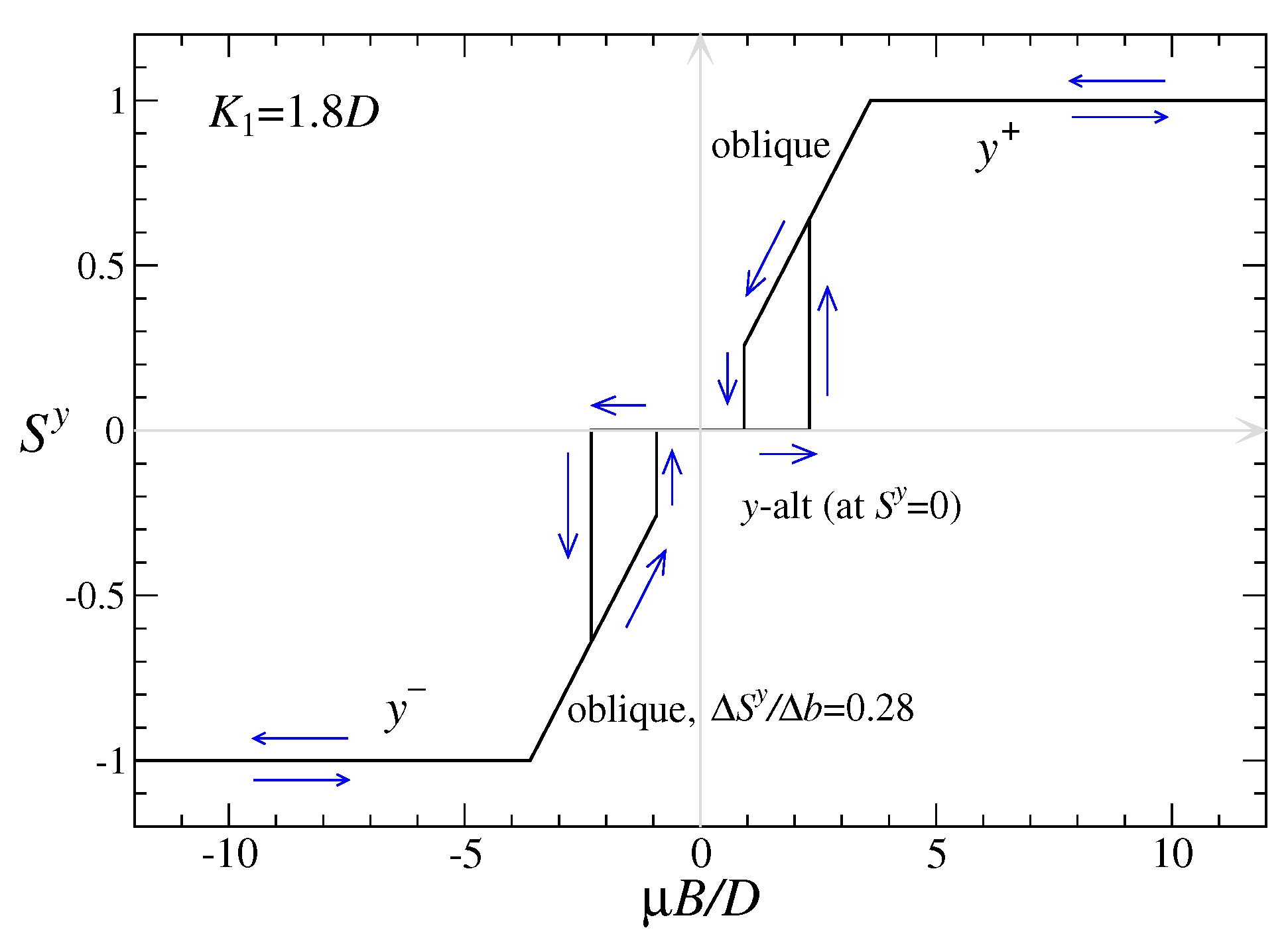
5.2. Magnetization Variations at
With slightly stronger anisotropy,
, inspection of the plot in
Figure 2 shows that all three types of states are possible as
b is varied. The expected zero-temperature magnetization curve is shown in
Figure 11. At
, only
y-alt is stable, which is the starting point. As
b increases above the lower limit of Equation (
14), oblique is stable; however, there is no reason to transition from
y-alt to oblique when
b passes that value. Only when
b surpasses the
y-alt stability limit of Equation (
26) will the
y-alt state destabilize into an oblique state. With somewhat larger
b, at the limit for stability of oblique states, Equation (
13), there is the transition into
y-par and the magnetization is saturated.
Bringing the field back down, the system transitions into oblique first, which then destabilizes at its lower field limit, Equation (
14), into
y-alt. These take place
before the field is reversed. Further reduction of the field to negative values and back up reproduces the same structure as on the positive field side. There are two sections with hysteresis, due to the coexistence of oblique and
y-alt states in that field range. The dimensionless magnetic susceptibility of the oblique state is increased to
, because a smaller field will saturate
, compared to that for
.
5.3. Magnetization Variations at
A similar case to consider is raising the anisotropy to
, for which all three types of states are still possible. The magnetization curve is shown in
Figure 12. Starting from
in a
y-alt state,
b can be increased until
y-alt destabilizes [field limit in Equation (
26)], involving a direct transition into
. There is no intermediate oblique state. Reducing the field back towards zero, the
state will destabilize into oblique [field limit in Equation (
13)], and not go directly back to
y-alt. The transition to
y-alt takes place at the lower stability limit for oblique states, Equation (
14), a
positive field. The same transitions occur for negative field values. There are large hysteresis blocks where
y-alt coexists with one of the
y-par states, only slightly deformed from rectangles, due to oblique being possible at lower field values. The oblique segments are very steep, with dimensionless magnetic susceptibility at
, precisely because only a weak magnetic field can hold the system in a
y-par state.
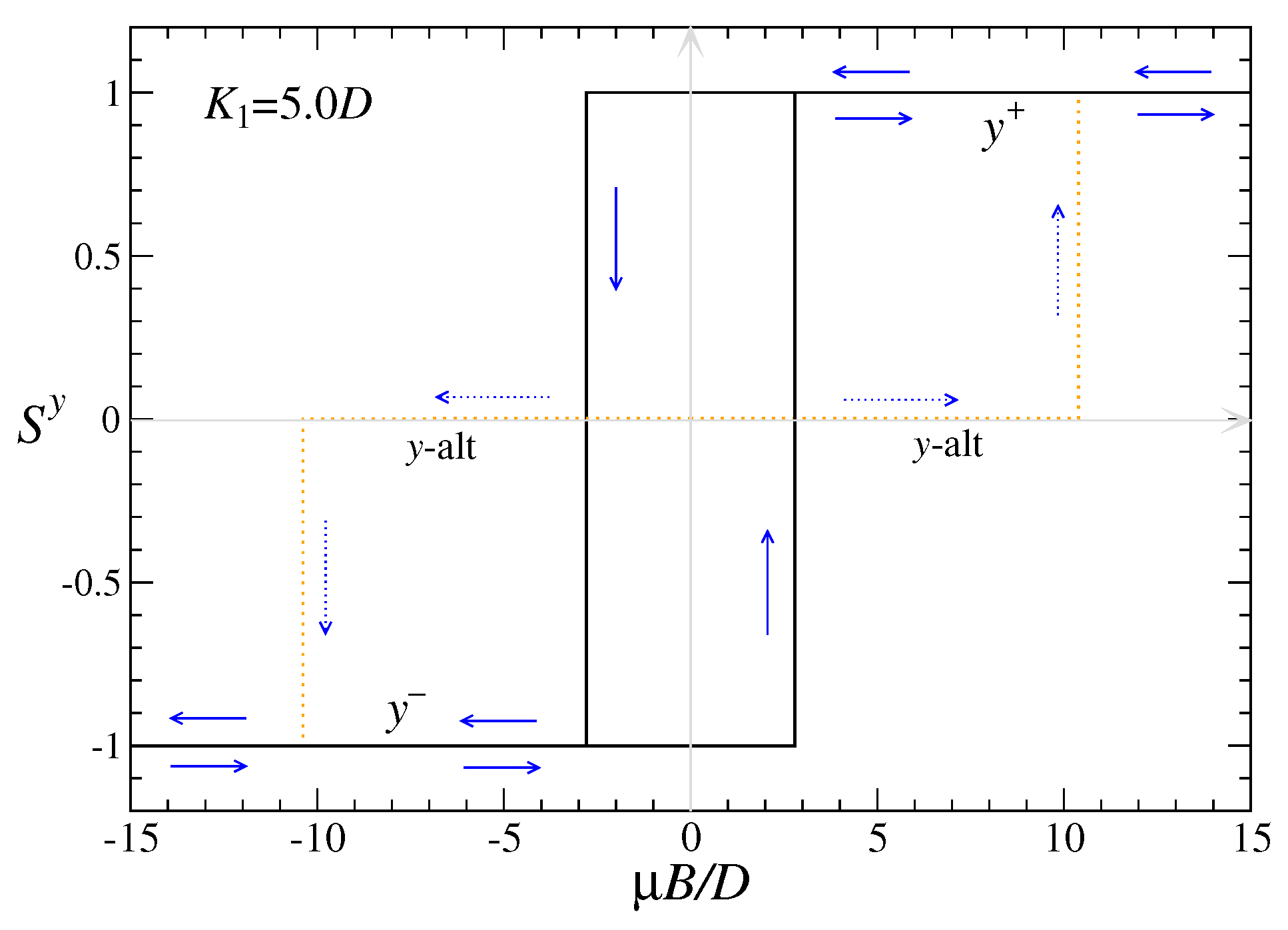
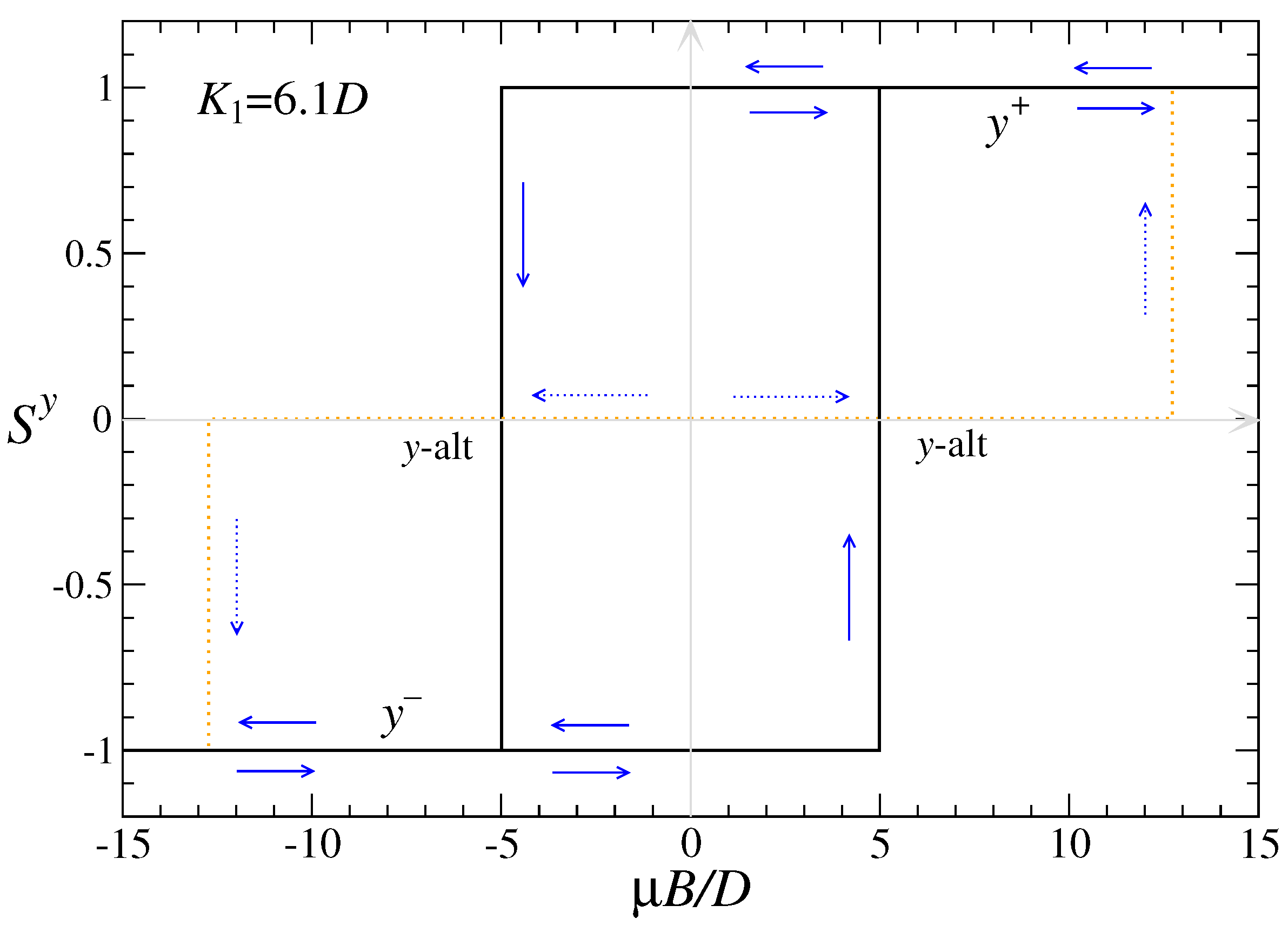
5.4. Magnetization Variations at
The next case considered is anisotropy values
, for which the diagram in
Figure 2 shows that only
y-par and
y-alt states are stable. A zero-temperature magnetization curve for
is shown in
Figure 13; a similar result holds for any
. The system is assumed to start in an unmagnetized minimum-energy
y-alt state at
. Ironically, however, applying an increasing and then decreasing field, the system will not return to a
y-alt state, as long as the temperature is zero.
Initially increasing
b on the positive side, the
y-alt state will become unstable at the maximum field given in Equation (
26), transforming into
, with positive saturated magnetization. This initial path in the magnetization curve is shown as a dotted curve. Once in the
state, if the field is reduced towards zero, the system can remain in
until it becomes unstable, which is a negative field value given by Equation (
14). Based on the two-sublattice effective potential
as plotted in
Figure 8 and
Figure 9, the system will transition from the
state into the
state, with negative saturated magnetization, completely avoiding the intermediate-energy
y-alt state, which is not on the downward energy flow from
.
The resulting magnetization curve then contains a typical rectangular hysteresis block, where and states are coexisting. The participation of y-alt is only possible when starting from the origin of the plot. At , once the field surpasses a value , the system is pushed into only the y-par states. It cannot return (at zero temperature) to the original y-alt state. The size of the hysteresis block increases with increasing anisotropy parameter .
Effectively, higher anisotropy values put the system into an exclusive two-state configuration or bistable switch. It switches from the initial
y-alt state into a
y-par state in a single-shot process, irreversibly. One can ask, how can the system be returned to
y-alt? For zero temperature, and assuming
is fixed, there is no way to return to
y-alt only by changing
b. Instead, heating the system above the Curie temperature, with subsequent zero field cooling, should return it to
y-alt. Alternatively, it may only require heating sufficiently to bring a
y-par state up over one of the saddle points that links it to the
y-alt states, as seen in
Figure 8 and
Figure 9.
5.5. Returning the System to y-Alt at Larger Anisotropy
For the LRD model with , the system moves into the hysteresis loop while switching between and states, completely avoiding any y-alt state, even though y-alt has lower energy at . In the two-sublattice effective potential , y-par and y-alt states are separated by a saddle, i.e., an energy barrier. At nonzero temperature, there will be some probability of falling back into the lower-energy y-alt state, even over the barrier. Once the temperature T is high enough such that the average thermal energy is comparable to the energy difference between and the saddle, the state will become thermodynamically unstable, and a transition to y-alt becomes highly probable.
Before finding the barrier, consider the energy difference between
y-par [Equation (
17)] and
y-alt [Equation (
25)] for
, as an energy for comparison. Including the unit
D, it is
The constant is
for the LRD model. The barrier tends to be smaller than
.
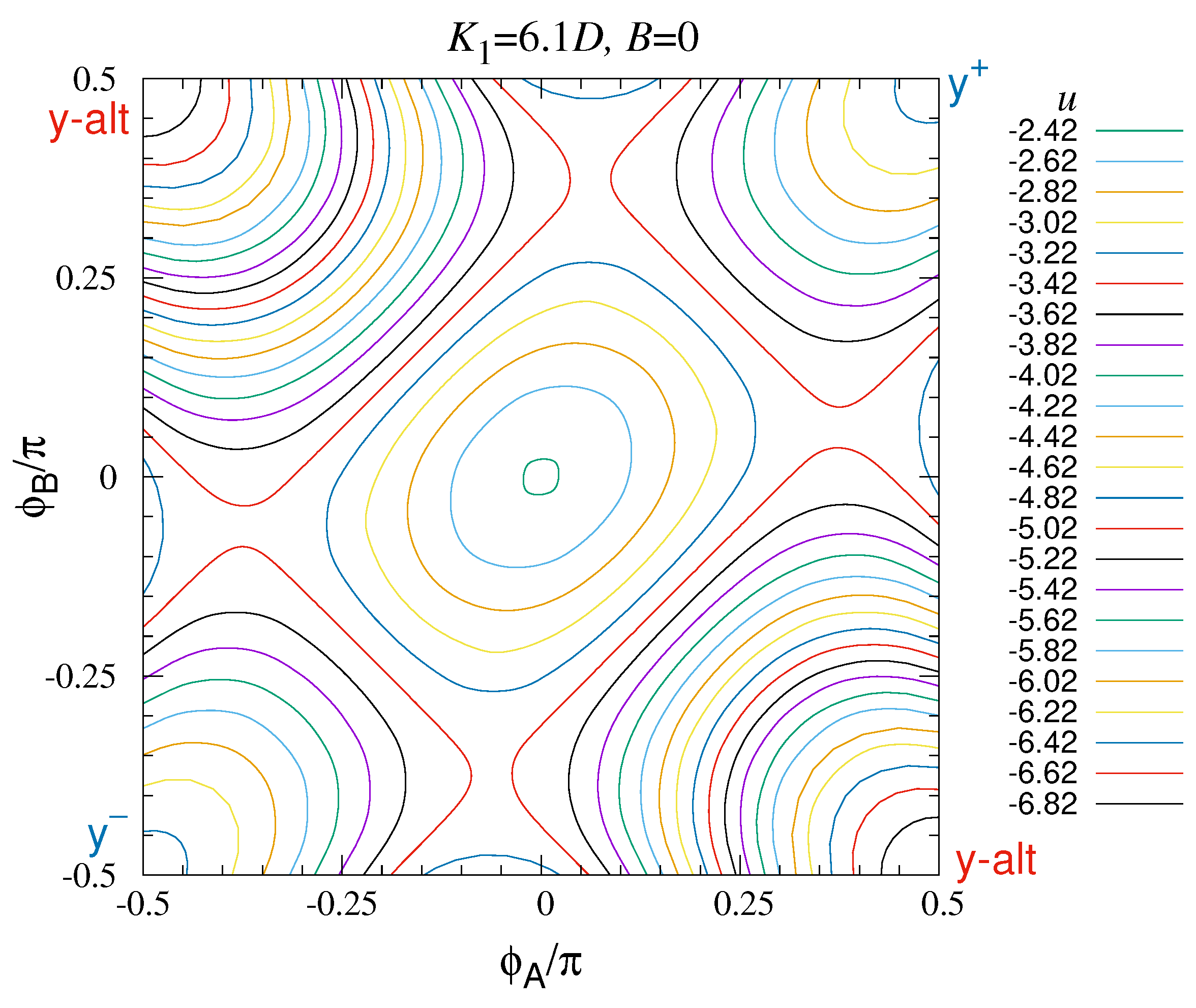
The two-sublattice potential in (
40) is used to estimate the barrier. For example, at
,
Figure 14 shows a combined surface and contour plot of
for
. A possible path from the
minimum at
, moving upward in energy over a saddle at approximately
, and then back down in energy to the
y-alt state at
is apparent. There are symmetry-related paths from
to the other
y-alt state, and also the paths from
to the
y-alt states. The corresponding flow diagram is seen in
Figure 15.
The
energy is
, the saddle point energy is
, and the
y-alt energy is
, all energies per site. The upward barrier height is
This is about
of the energy difference between
y-par and
y-alt states. The dipole coupling
D is included because it affects the physical value for estimates for real materials, found next.
6. Results: Anisotropy, Dipole Constant, and Energy Barrier for Real Islands
I consider some real arrangements of magnetic islands made from available materials and ask: What values of D, and will result, and how large is the energy barrier ?
These estimates are based on previous work [
26] on anisotropy constants in elliptically shaped magnetic islands. The island sizes are denoted
, where
is the major diameter,
is the minor diameter, and
is the vertical thickness. Aspect ratios are defined as
The anisotropy constants per unit volume,
, depend on these island aspect ratios. Data from
Figure 3 and 6 of Ref. [
26] were used to obtain numerical estimates of anisotropies.
The magnetic medium for the islands is assumed to have a zero-temperature saturation magnetization
and a continuum exchange stiffness
A, which together determine an exchange length given by
These material parameters, together with the Curie temperatures, have been summarized from Ref. [
27] and shown in
Table 1 for different ferromagnetic media, that could be candidates for the design of magnetic island chains.
As an elliptical cylinder, the volume of an island is
The net dipole moment for a single aligned domain is
I consider a few different island sizes, geometries, spacing
a, and magnetic media. Generally, greater anisotropy constants
,
apply for larger islands.
6.1. Case A: 240 nm × 48 nm × 24 nm Islands
This example geometry termed Case A is shown as purple diamonds in
Figure 6 of Ref. [
26], defined by
nm and aspect ratios
,
. The anisotropy constants are proportional to the volume and the exchange stiffness, and they are of similar size,
Consider Ni
80Fe
20 Permalloy (Py) as a typical material, with saturation magnetization
kA m
−1, continuum exchange stiffness
pJ/m, and exchange length
nm. The island volume is
m
3 while the dipole moment is
Am
2. Then, the estimated anisotropies for Py islands are
Considering separation equal to the island length,
nm, the NN-dipole coupling is estimated as
Clearly it is a small energy scale compared to the anisotropies; it could be increased by using closer separation, but at the risk of invalidating the point dipole approximation. Then, in the case of Py material, the scaled anisotropies would be
These are somewhat large, due to the weakness of the dipole interactions relative to the anisotropies. A real system with values of
and
less than 10 would be better for exhibiting the features found in this study. Therefore, as
A determines the anisotropies, and
determines
and hence
D, it may be better to use an FM material that has lower exchange stiffness and higher saturation magnetization, if one wants
and
to be of the order of 10.
The scaled anisotropies can be expressed in terms of the exchange length, which is better for considering different media, as follows:
These contain a numerical anisotropy factor, followed by a geometrical factor
, followed by a material factor of squared exchanged length. This shows that shorter exchange length (i.e., using a different medium) and larger island volume will lead to weaker relative shape anisotropies. For this geometry, the geometrical factor is
One way to decrease this factor is to use the same in-plane aspect ratio (
) but change to thicker islands (smaller
). When
is increased, the study in Ref. [
26] indicated that
also increases while
decreases.
Using Materials Other than Py
Data on other materials from Ref. [
27] are summarized in
Table 1. If extremely large scaled anisotropies are to be avoided, then media with an exchange length smaller than that in Py may be better suited. For example, gadolinium (Gd) is a rare-earth element with
2.5 pJ/m and large
2.12 MA/m at zero temperature, and a resulting exchange length
nm. For the Case A island geometry, one obtains from Equation (
52),
Now, the value is barely in the range
. By adjusting
a to a different separation, or changing the overall size of the islands, this can be brought into nearby desired values. But Gd has a low Curie temperature,
K, so other media may be more practical for room-temperature application.
Another possible material is GdZn alloy, for which
pJ/m,
MA/m, and
nm. Formula (
52) gives
, which could be scaled up or down by changes in separation
a or reducing or increasing the island volume
V. The Curie temperature of 270 K is still below room temperature, however.
For the other possible media choices in
Table 1, a short exchange length (
nm) coupled with a high Curie temperature (
K) may be best for producing practical island arrays with moderate-sized scaled anisotropies, depending on the desired use. The resulting scaled anisotropies are identified in
Table 2 under the Case A column. Some of the iron-based compounds listed have exchange lengths about 3 nm or below, and Curie temperatures above room temperature. That includes Fe
2B, YFe
11Ti, Y
2Fe
14Si
3, and Y
2Fe
17. These may be better for possible experiments and/or devices made based on this system’s physics.
6.2. Case B: 240 nm × 80 nm × 30 nm Islands
This example geometry termed Case B is defined by
nm with aspect ratios
,
, with separation
nm. The anisotropies per volume are shown as blue squares in
Figure 6 of Ref. [
26]. This has similar
as Case A but a larger volume,
, which will reduce the geometric factor. The per-volume energies in Ref. [
26] give anisotropies
The scaled anisotropies are found from
For this geometry, the geometrical factor is
This will reduce both scaled anisotropies. For example, Py islands would have
, while Gd islands would have
, which is so low that only oblique and
y-par states would be present. The results for other media with this geometry are shown as Case B in
Table 2. Especially the compounds with Gd have surprisingly low scaled anisotropies. Y
2Fe
17 also has low values, and its low
could make for interesting tests of the changes with temperatures below and above room temperature.
6.3. Case C: 240 nm × 120 nm × 12 nm Islands
This example geometry termed Case C is defined by
nm with aspect ratios
,
, and separation
nm. Realizing that
does not affect the stability limits of the three types of states, it is good to look at the geometry that has the lowest value of
, and ignore the fact that is also has one of the highest values of
. The anisotropies per volume are shown as solid black dots in
Figure 6 of Ref. [
26]. Those values give
The volume
is slightly greater than that for Case A. This gives the general scaled anisotropies,
The
value is significantly smaller than in Case A and Case B. The geometrical factor is between that of Case A and Case B,
This will result in a smaller
scaled anisotropy, but rather large
. To compare to cases A and B, islands of Py now have
, while islands of Gd have a very low value,
, where only oblique and
y-par states are stable.
The results for this geometry are shown as Case C in
Table 2. Various compounds of those listed could be used to obtain
from just below 1 for Gd media to 8.4 for Fe. The values of
are about 10.5 times larger than
, but
does not affect the per-site energies nor the stability limits, because all
for the three types of states studied. Out-of-plane motions will have a high cost in energy when
is large, so they will be strongly limited.
6.4. Case C with Y2Fe17 Islands
For Case C (240 nm × 120 nm × 12 nm) islands of Y
2Fe
17, the scaled anisotropies are
and
at separation
nm. The magnetization curve does not depend on
and should be like that in
Figure 12, with transitions at slightly different scaled fields. This is a situation where the system passes through all the states
y-alt,
y-par, and oblique. In a block of the hysteresis pattern, there are two sharp transition fields (with values for
): the first at
, where
y-alt transitions into
, and the second at
, where oblique transitions back down into
y-alt. The physical values
and
of these transition fields cannot be evaluated without knowing
D.
With volume
m
3 and
1.24 MA/m, the dipole moment is
The physical value of
D is then
Then, the transitions in the hysteresis plot are converted to physical units,
These fields are quite small and should be easily accessible in experiments well below
K.
Rescaling each of the islands’ dimensions and the separation all by an identical factor h will rescale both D and by , while preserving , , , , , and . Then, although the energy scale changes, the transition fields and also remain unchanged.
6.5. Case C: y-Par to y-Alt Energy Barrier for YFe11Ti
Consider the yttrium compound with the highest
, YFe
11Ti, with
, for
nm
3 islands at separation
nm. The
magnetization plot is shown in
Figure 16. The hysteresis loop is only slightly wider than that for
in
Figure 13. The transition fields in the hysteresis loop and the energy barrier for spontaneous transitions from
y-par to
y-alt are estimated here.
The barrier and transition fields are proportional to
D, which is first estimated. The volume is
m
3 and
1.09 MA/m, giving the dipole moment
The physical value of
D is
Starting from
y-alt, the first sharp transition takes place at
where
y-alt destabilizes into
. Once in the
y-par states, transitions between them take place at a scaled field magnitude
from Equation (
20). These are converted to their physical values,
These are low fields, easily accessible in experiments.
A plot of the two-sublattice potential of Equation (
40) will indicate the energy barrier, which is the saddle height above the
state, from which the system can relax directly down to
y-alt. The important points are represented in a contour plot for
for
, in
Figure 17. The
y-par states have per-site energy
, the four saddle points have
, and the
y-alt states have
. Then, the barrier height for a
y-par to
y-alt spontaneous transition is
Combining with the result for
D, one has
At a temperature
K, this is about 220 times the thermal energy
, where
is Boltzmann’s constant. Or, the average thermal energy
reaches the barrier height for
68,000 K. The medium would pass above its critical temperature long before it goes over this barrier spontaneously. The system is very stable against any transition into
y-alt for
. But note: the barrier height will be reduced to zero as the temperature reaches
. The saturation magnetization will tend towards zero, causing
and
. Heating to the Curie temperature followed by zero-field cooling well below
would bring the system back to an energy-minimizing
y-alt state.
In
Section 6.4, it was noted that rescaling all the island dimensions and their separations will shift
,
D, and the energy barrier while preserving
and
, and hence the shape of the hysteresis plot. Here, I suppose the island dimensions and separation are all scaled down by a factor of 1/4, to 60 nm × 30 nm × 3 nm, and
nm. This reduces both
and
D by factors of 1/64, leading to
zJ, and the barrier becomes
Now, the temperature where the thermal energy equals the barrier and spontaneous transitions can take place becomes
K, about twice the Curie temperature for YFe
11Ti. Still, at room temperature, over-the-barrier transitions are not likely. Heating the system above
followed by zero-field cooling will still return the system to a
y-alt minimum energy state.
In terms of the hysteresis curve, the rescaling of island dimensions and separation leaves the ratio
unchanged, and the transition fields stated in (
66) are unchanged.
As an alternative, modification of only the island separation or only the island dimensions (while preserving the aspect ratios) could be used to shift as well as D to change both the shape of the hysteresis curve and the overall energy scale.
7. Discussion
This model of a chain of elongated magnetic islands with long-range dipole interactions has three types of uniform states, oblique, y-par, and y-alt states, all with two possible polarizations. Under appropriate transverse magnetic field, each state can be stable, metastable, or unstable. Metastable means the state is a local energy minimum but it has a higher energy than some lower stable state, to which it could decay over some energy barrier. At field values where a metastable state loses its stability, a transition occurs into a lower state and manifests itself as a feature or sudden jump in the magnetization curve. The model allows for locating the exact conditions for these transitions to happen, depending only on the in-plane (easy-axis) anisotropy parameter and the field energy measured relative to the NN dipole coupling D. For various , the resulting zero-temperature hysteresis curves have been estimated.
For small relative anisotropy,
, only oblique and
y-par states are possible, and because they are exclusive and connected at a transition field [Equation (
13)], there is no hysteresis, as in
Figure 10. If
has an intermediate value,
, the
y-alt states dictate at weak field and complex hysteresis patterns, such as those in
Figure 11 and
Figure 12 with double blocks result. Finally, for large anisotropy
, once the system has left an initial
y-alt state, only the two oppositely polarized
y-par states are accessible (referred to as
and
) and the hysteresis pattern has only a single block centered on the origin, as in
Figure 13. The width of that block increases with
.
For systems with and at zero field, the y-alt states have the lowest energy. Even so, once a field brings the system into or , it will remain in one of those states, even at zero field. The energy barrier to destabilize a y-par state into y-alt at zero field has been estimated, and will be large compared to the room-temperature thermal energy for examples of moderately sized islands. The y-alt states will only be easily accessible afterwards by heating the system above the Curie temperature and subsequent zero-field cooling, which should return it to one of the minimum-energy y-alt states.
For some selection of FM materials and possible island sizes and spacing, estimates have been made for the anisotropy constants
and
. These relative anisotropy constants are proportional to
, where
a is the island separation,
is the exchange length, and
V is the volume of magnetic material in an island. Typically,
tends to be larger than
; however, only
determines the states’ stabilities and the magnetization curves. One interesting possibility is elliptical islands of YFe
11Ti of size
nm
3 at separation
nm, for which
, with transition fields at
mT,
mT, and a zero-field
y-par to
y-alt energy barrier of 14.6 zJ (
K). This or other designs could be sensitive to low fields, possibly acting as a detector or switching device. Based on crystallographic properties [
28], including a primitive cell size
nm and magnetic moment
per formula unit, this island size would still contain about 250,000 Fe atoms, assumed to move in unison within each island at
. There may be modifications for
, especially due to enhanced fluctuations at the surfaces associated with a thin magnetic dead layer [
20,
21,
22].
Experimentally, it should be possible to construct magnetic island chains with properties similar to what is outlined here. The behavior predicted here applies only if the islands are small enough and well separated, such that they have nearly uniform internal magnetization.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}