
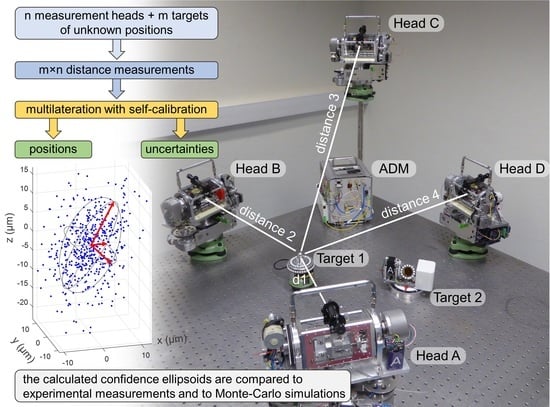
Multilateration with Self-Calibration: Uncertainty Assessment, Experimental Measurements and Monte-Carlo Simulations


Abstract
:
1. Introduction
2. Multilateration with Measurement Head Positions Perfectly Known
2.1. Determination of the Target Position
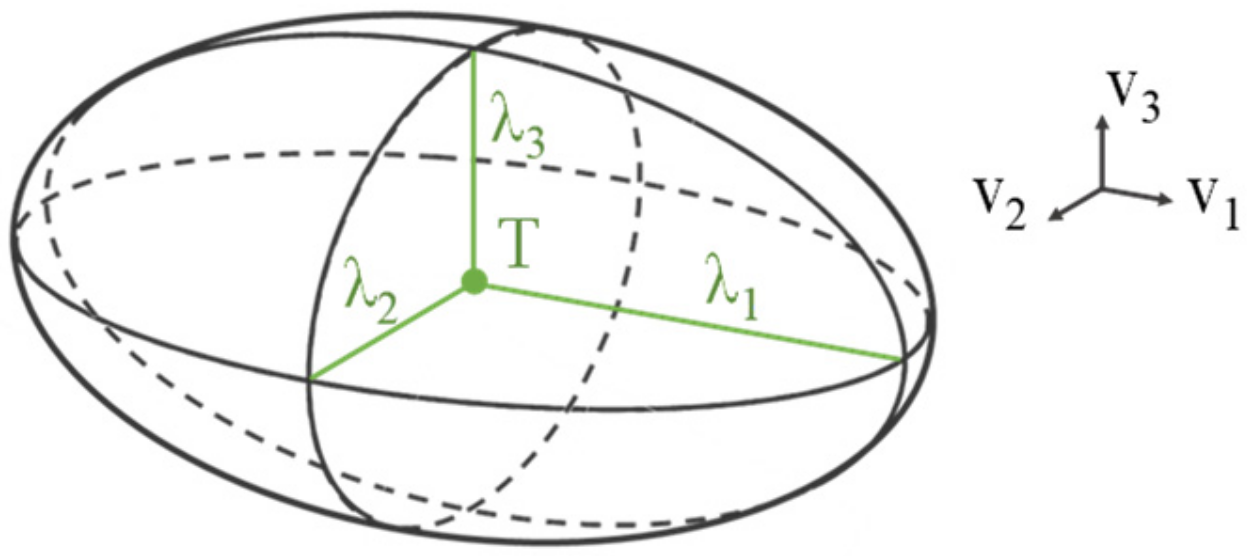
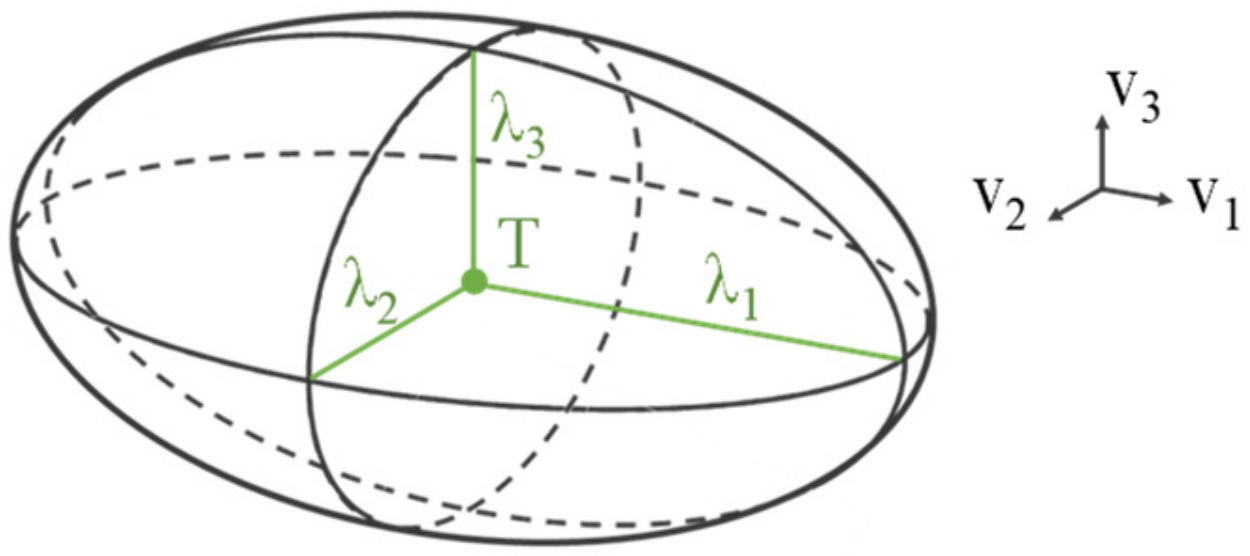
2.2. Uncertainty Assessment and Confidence Ellipsoid
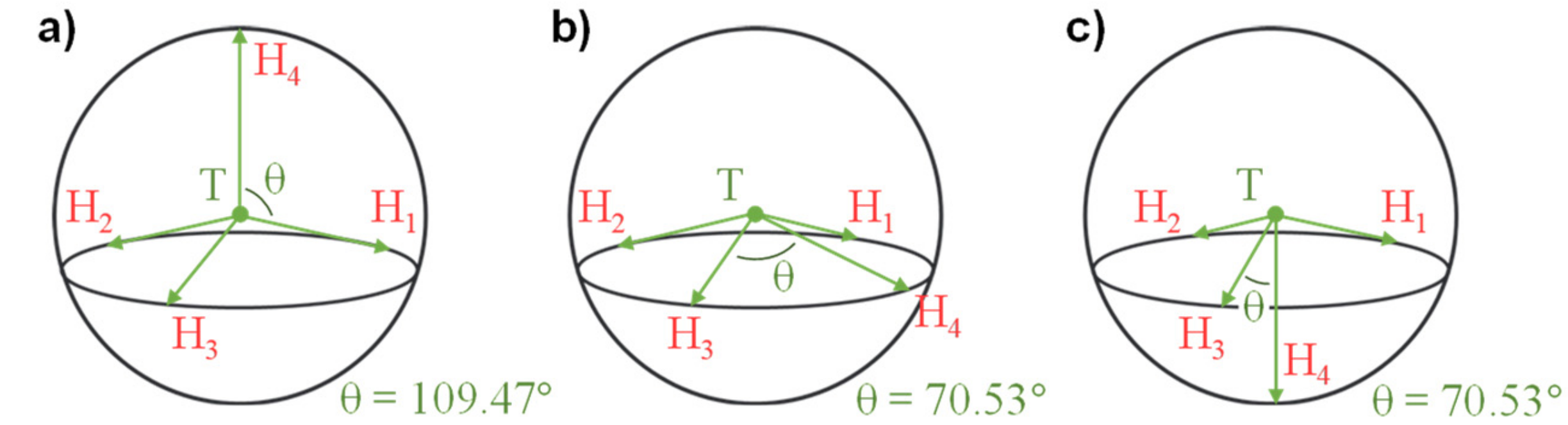
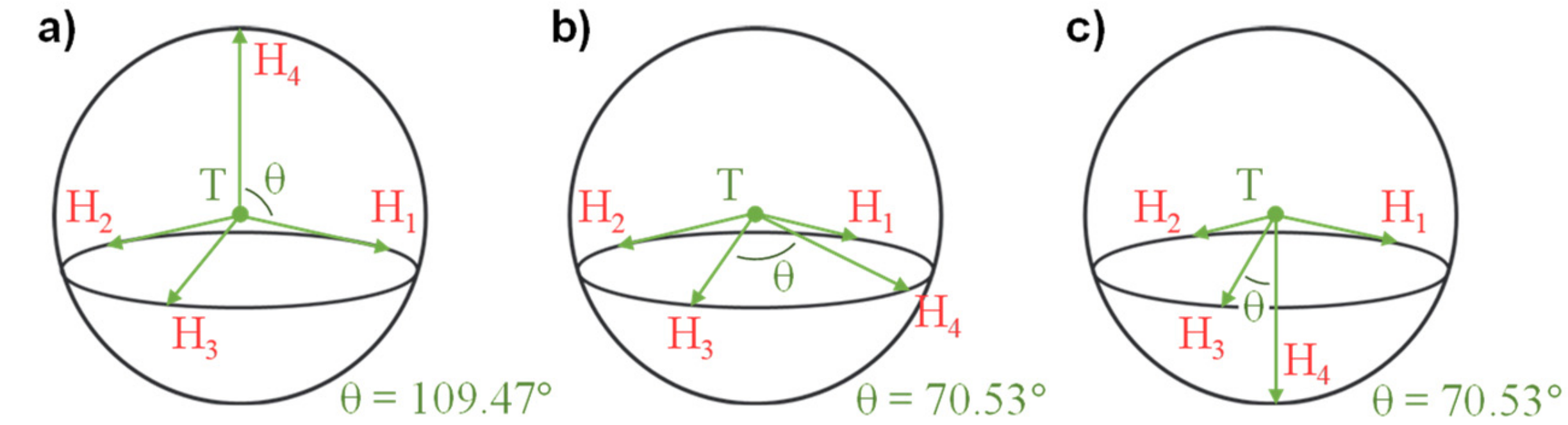
2.3. Best Arrangements for Multilateration with 4 Heads
3. Multilateration in the Presence of Uncertainties on the Measurement Head Positions
3.1. Determination of the Target Position
3.2. Uncertainty Assessment
4. Multilateration with Self-Calibration
4.1. Determination of the Targets and Head Positions
4.2. Uncertainty Assessment
4.3. Instrument Offsets
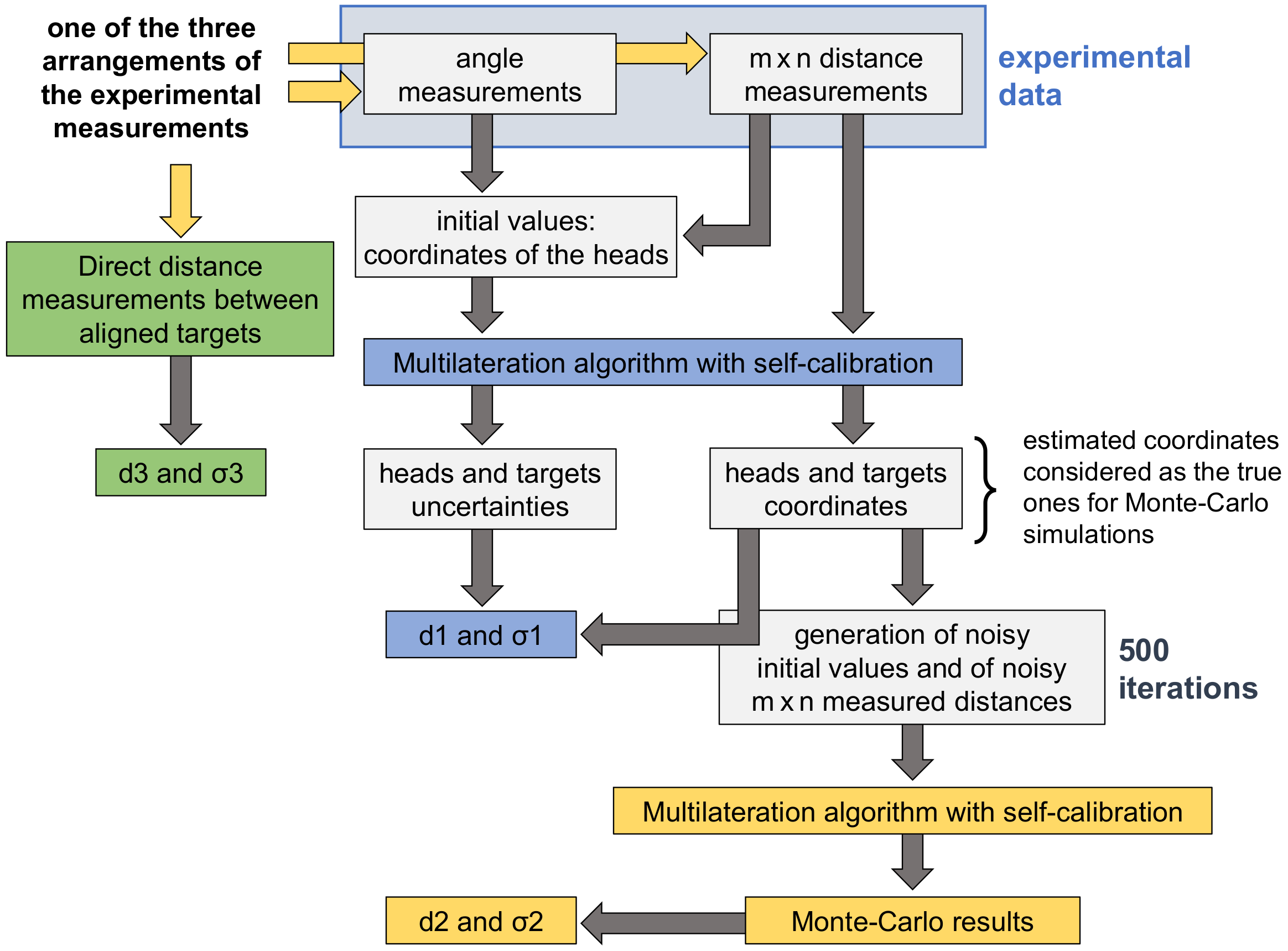
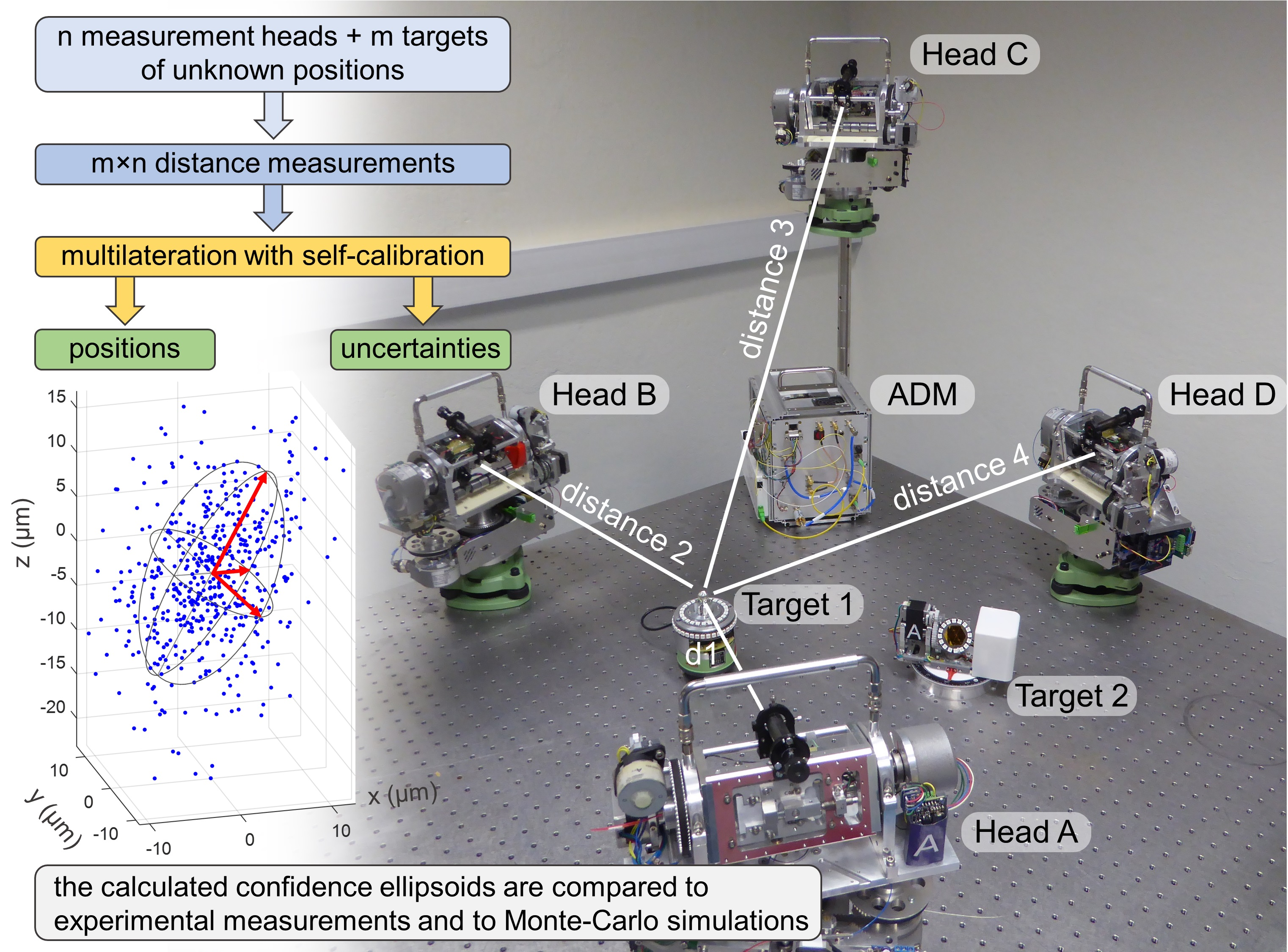
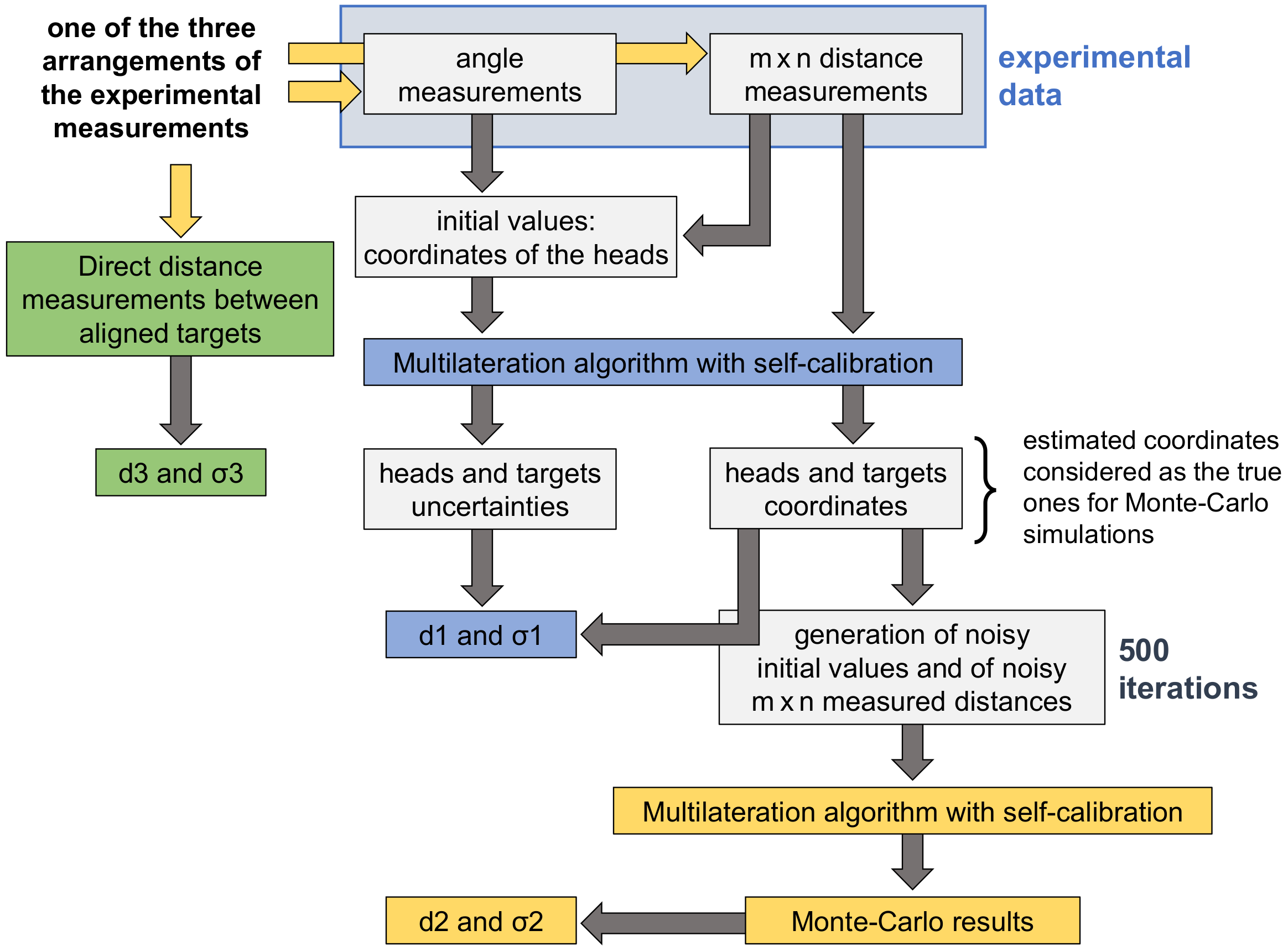
5. Experimental Results versus Monte-Carlo Simulations for Multilateration with Self-Calibration
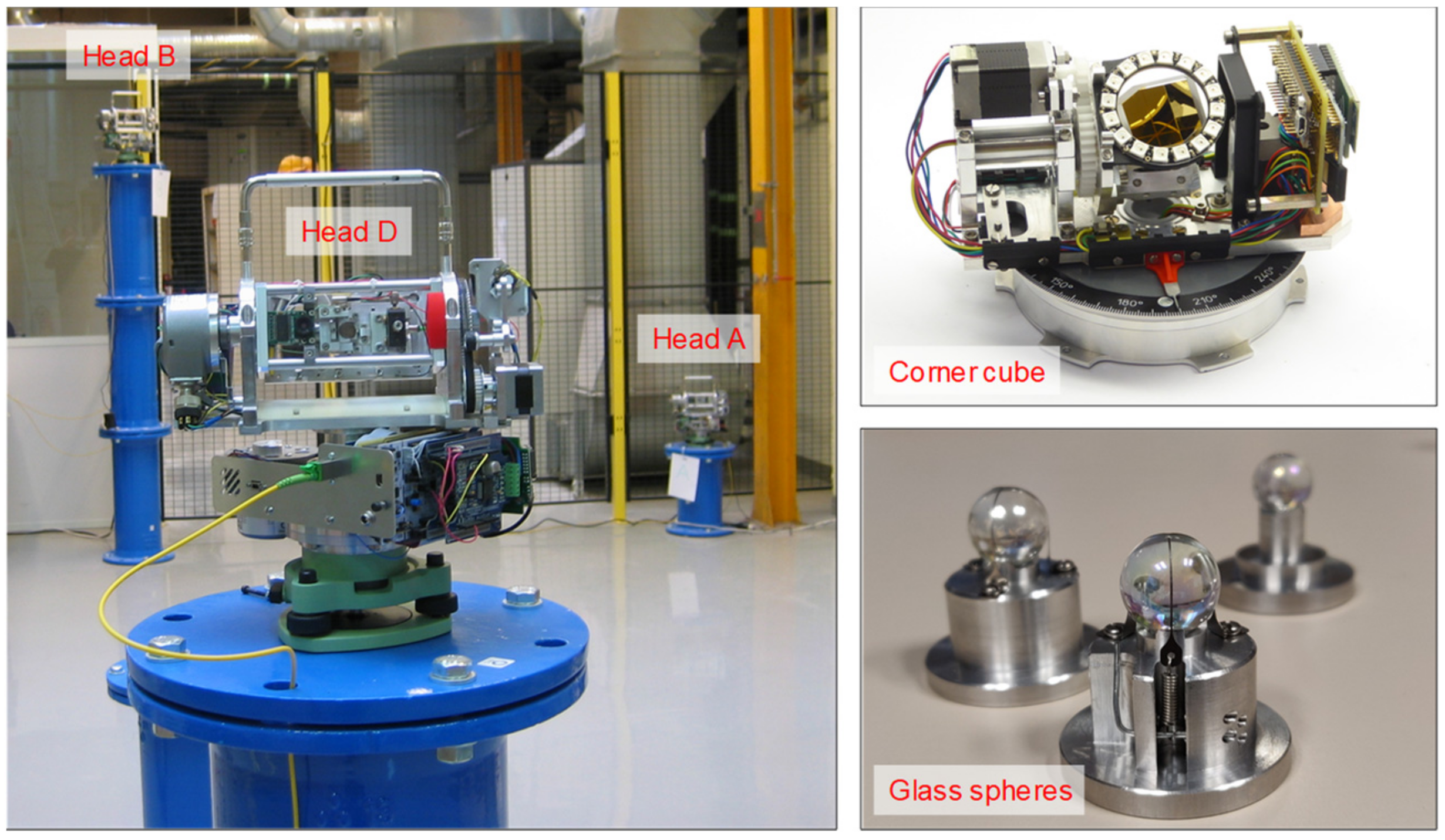
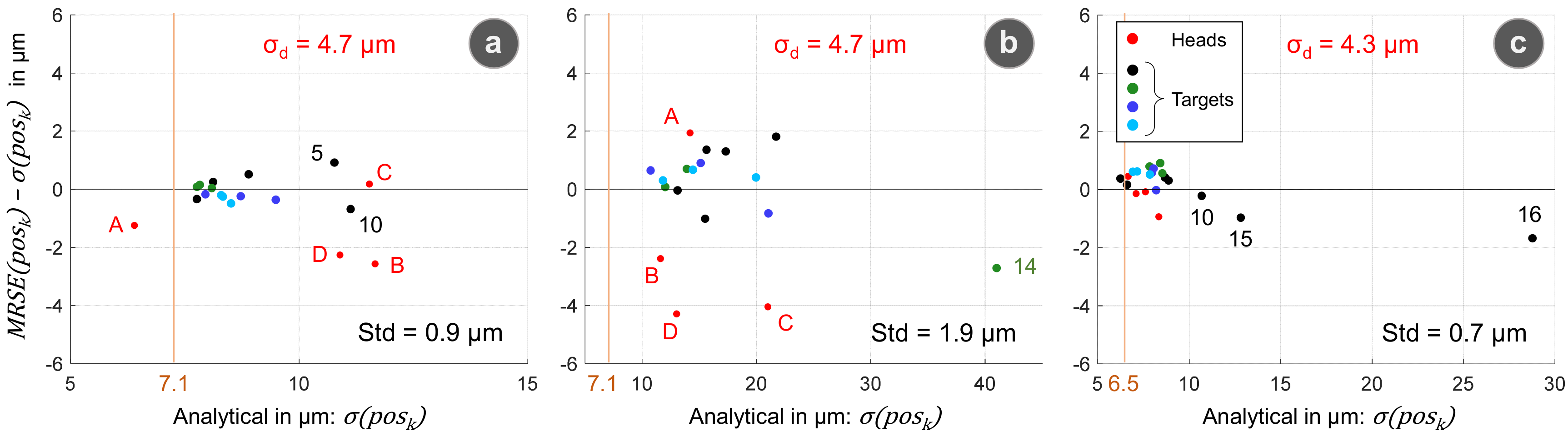
5.1. Experimental Results
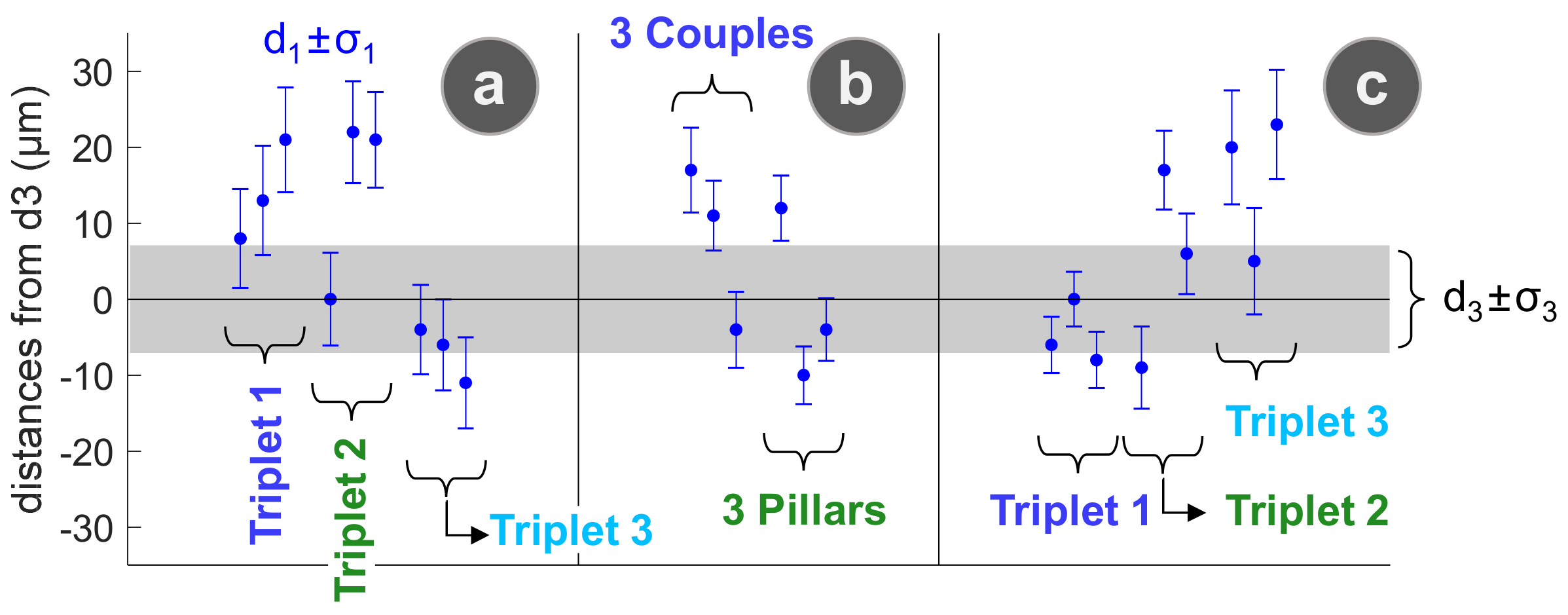
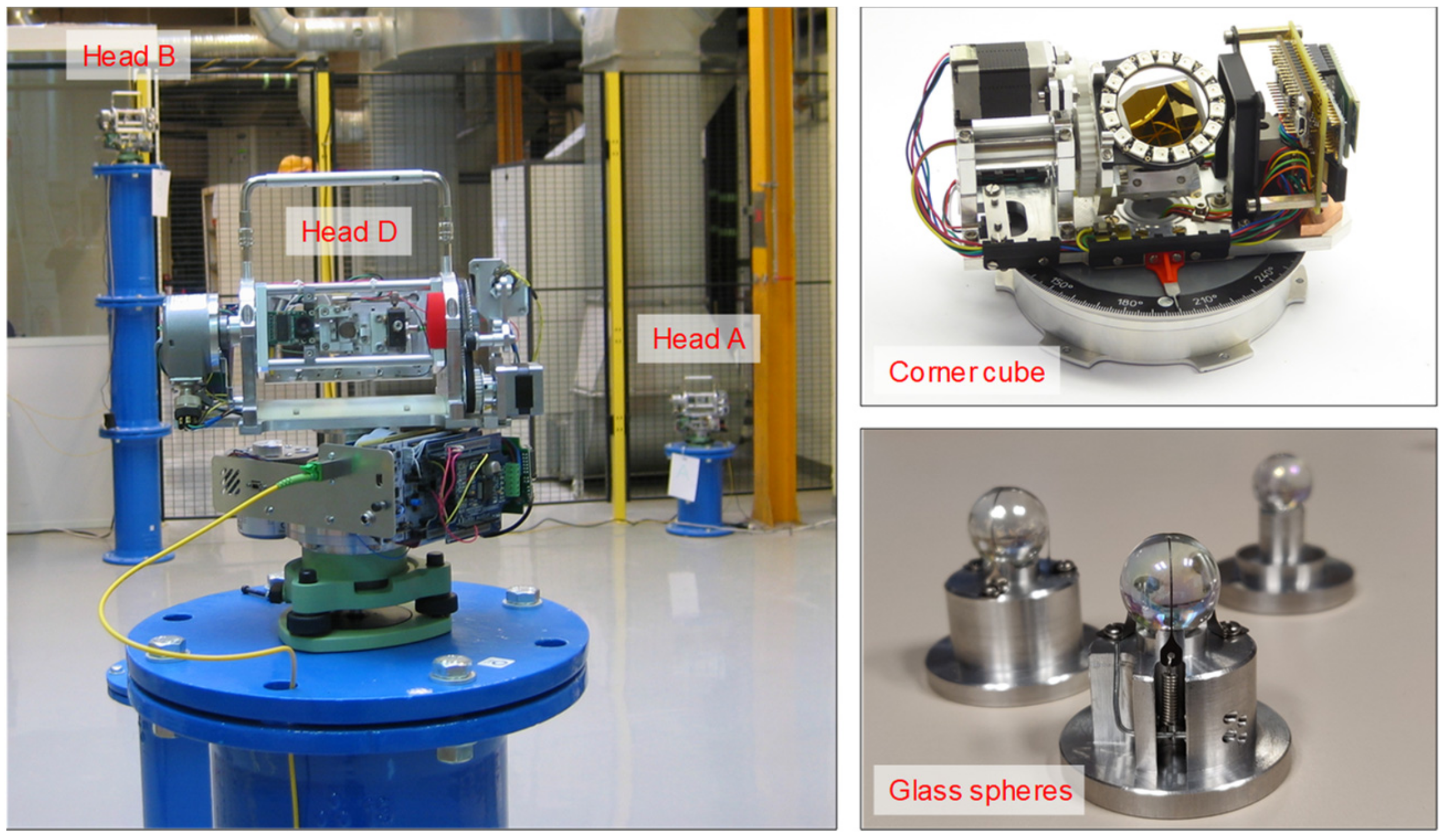
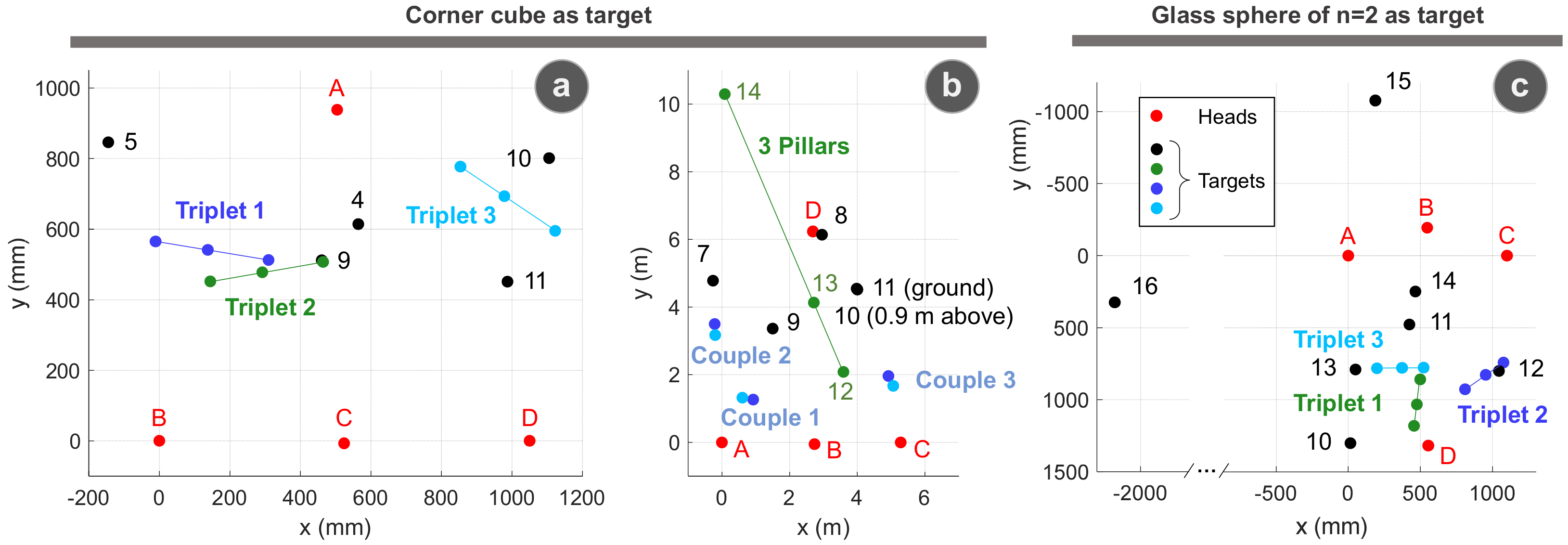
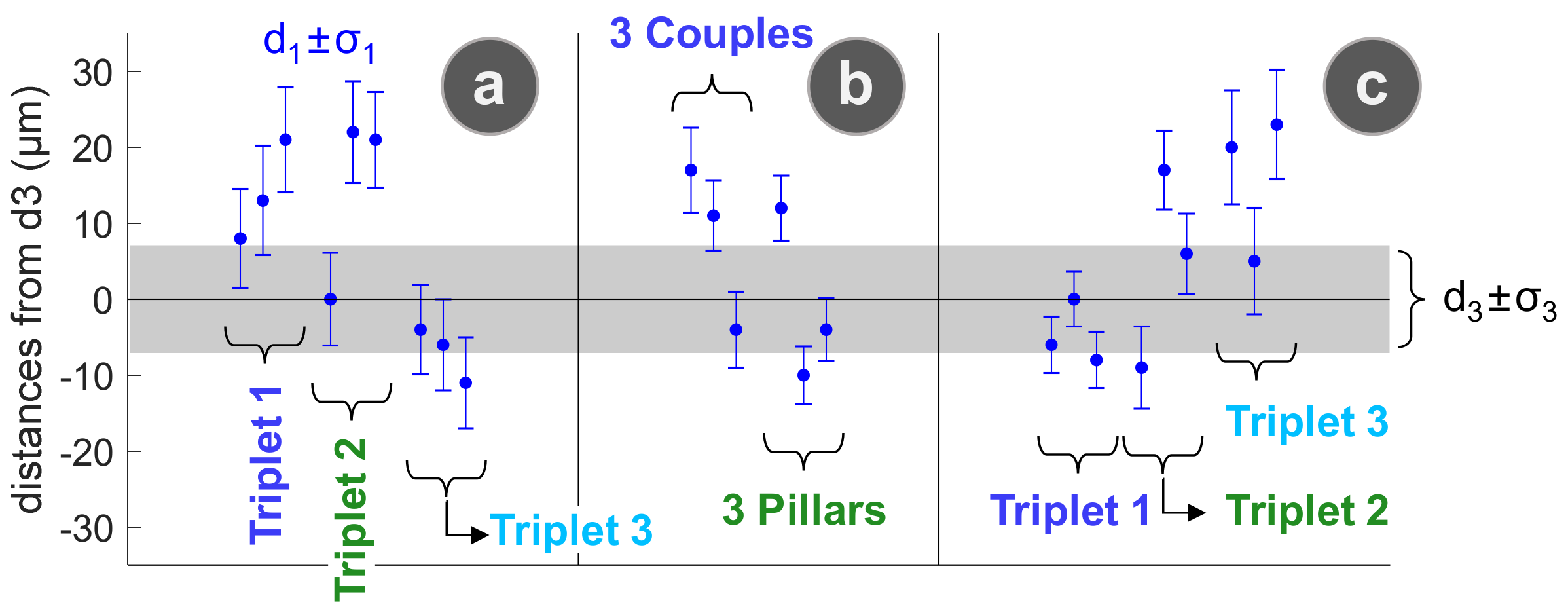
- The first case is a small volume of one cubic meter using a corner cube as target in 14 different positions.
- The second case is a large volume with distances up to 11.5 m and a corner cube in 14 different positions.
- The third case is a small volume of one cubic meter using a glass sphere of index n = 2 as target in 16 different positions.
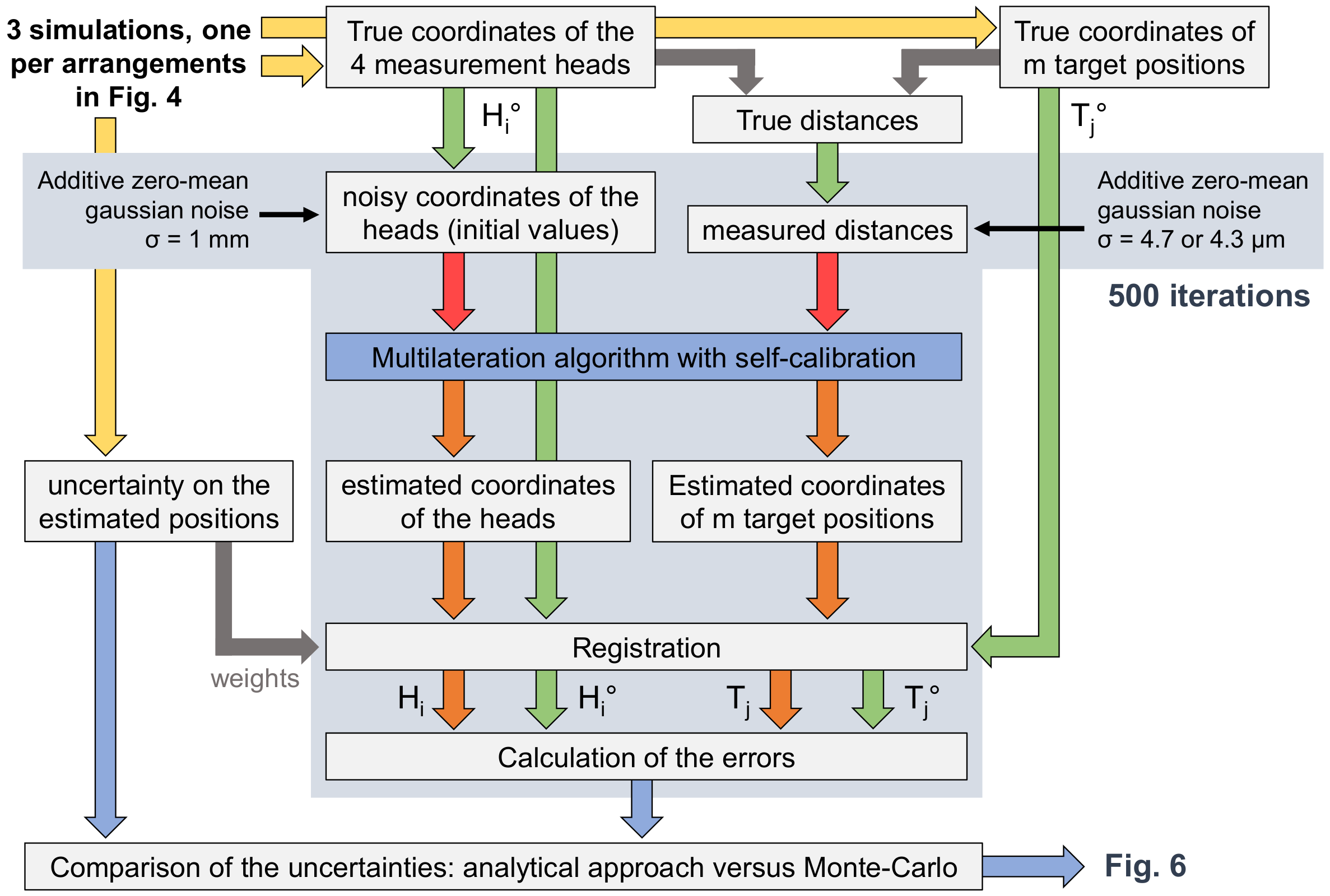
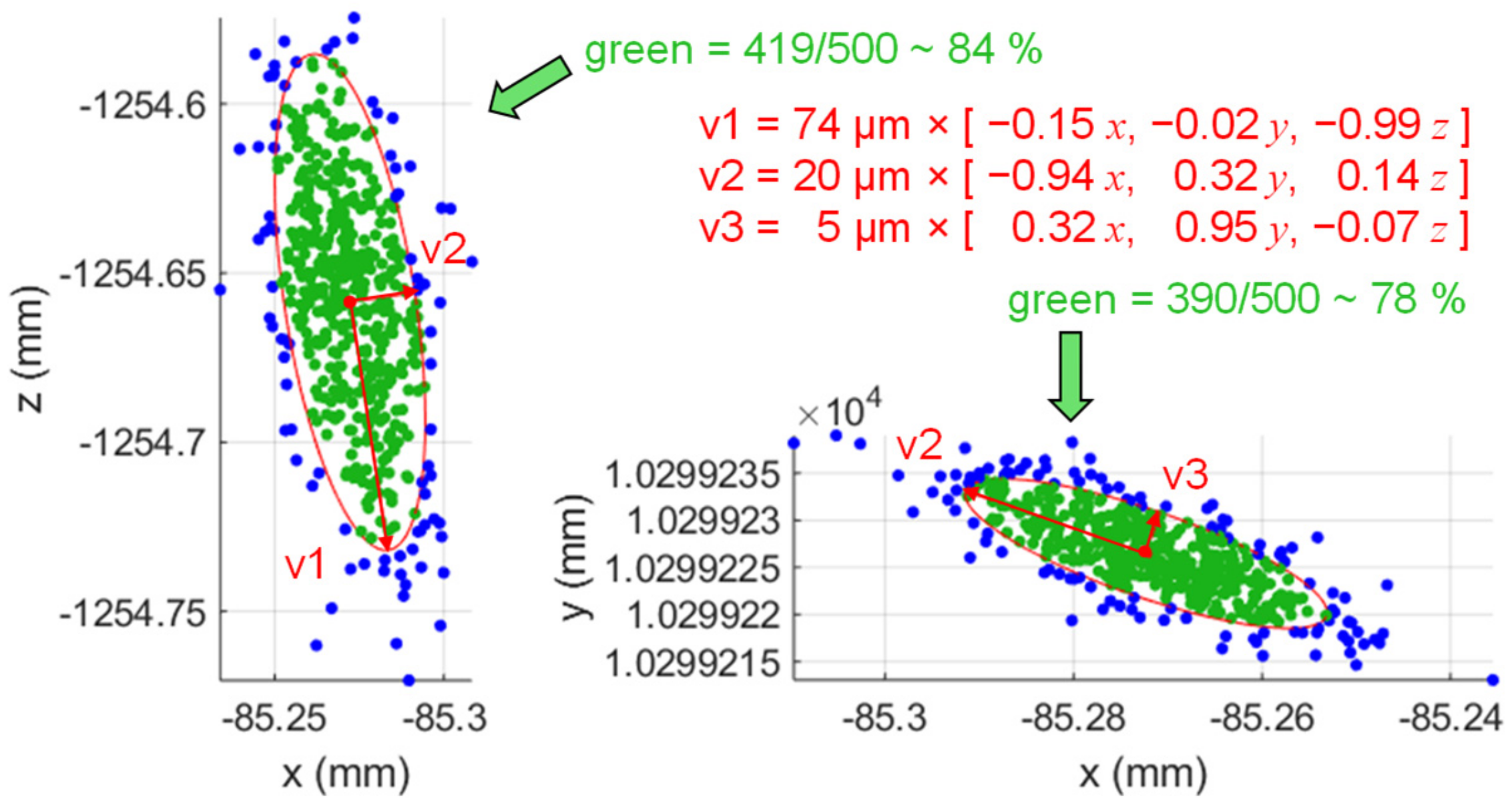
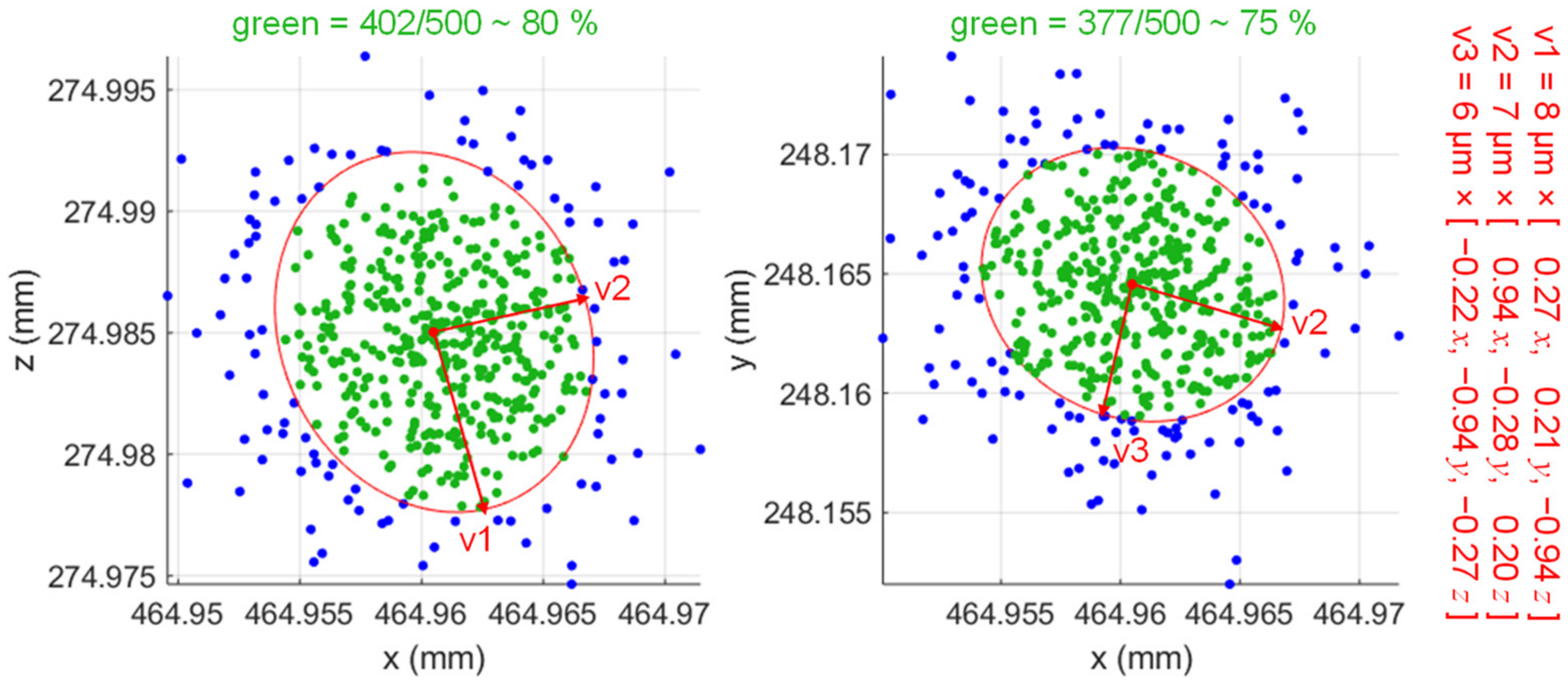
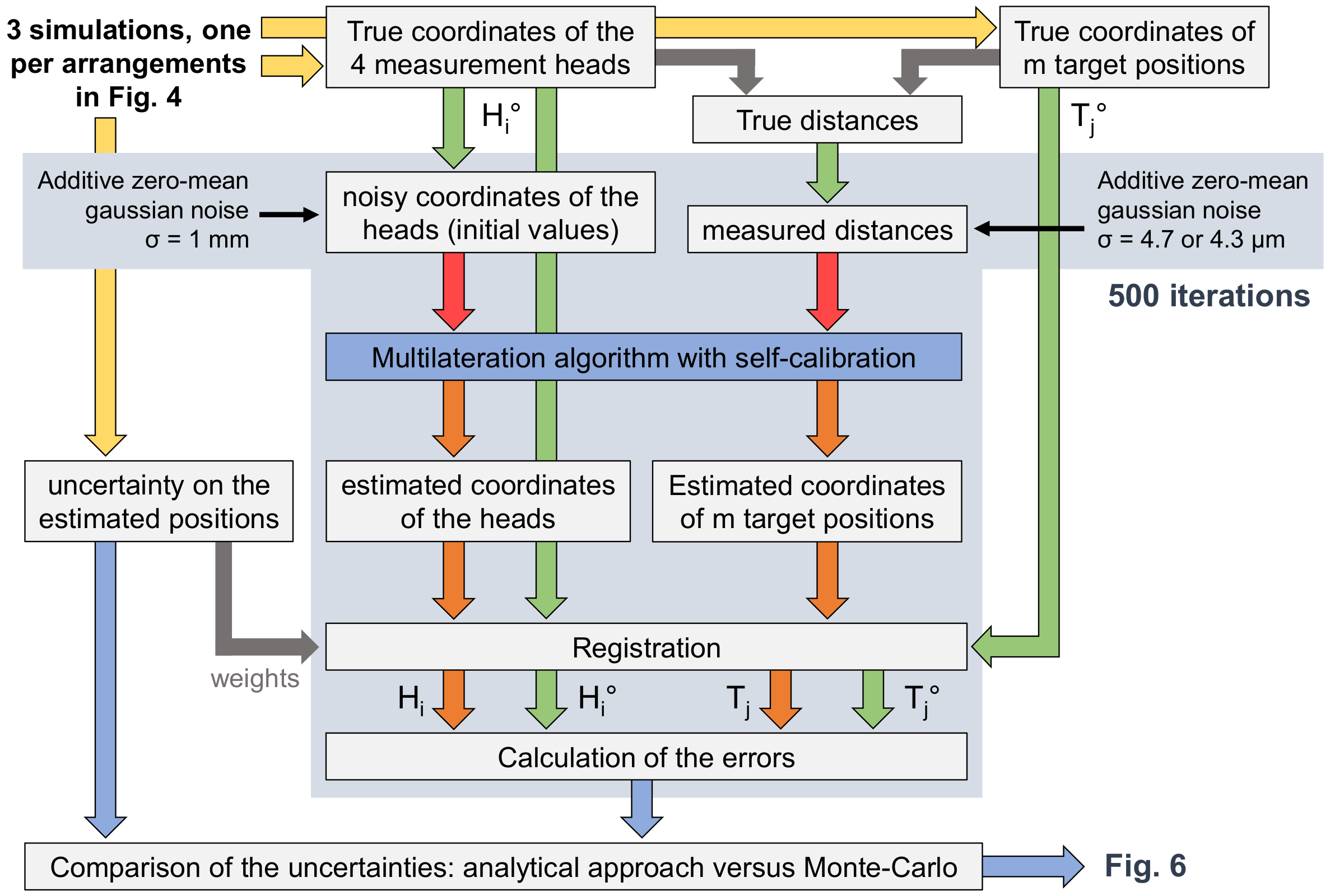
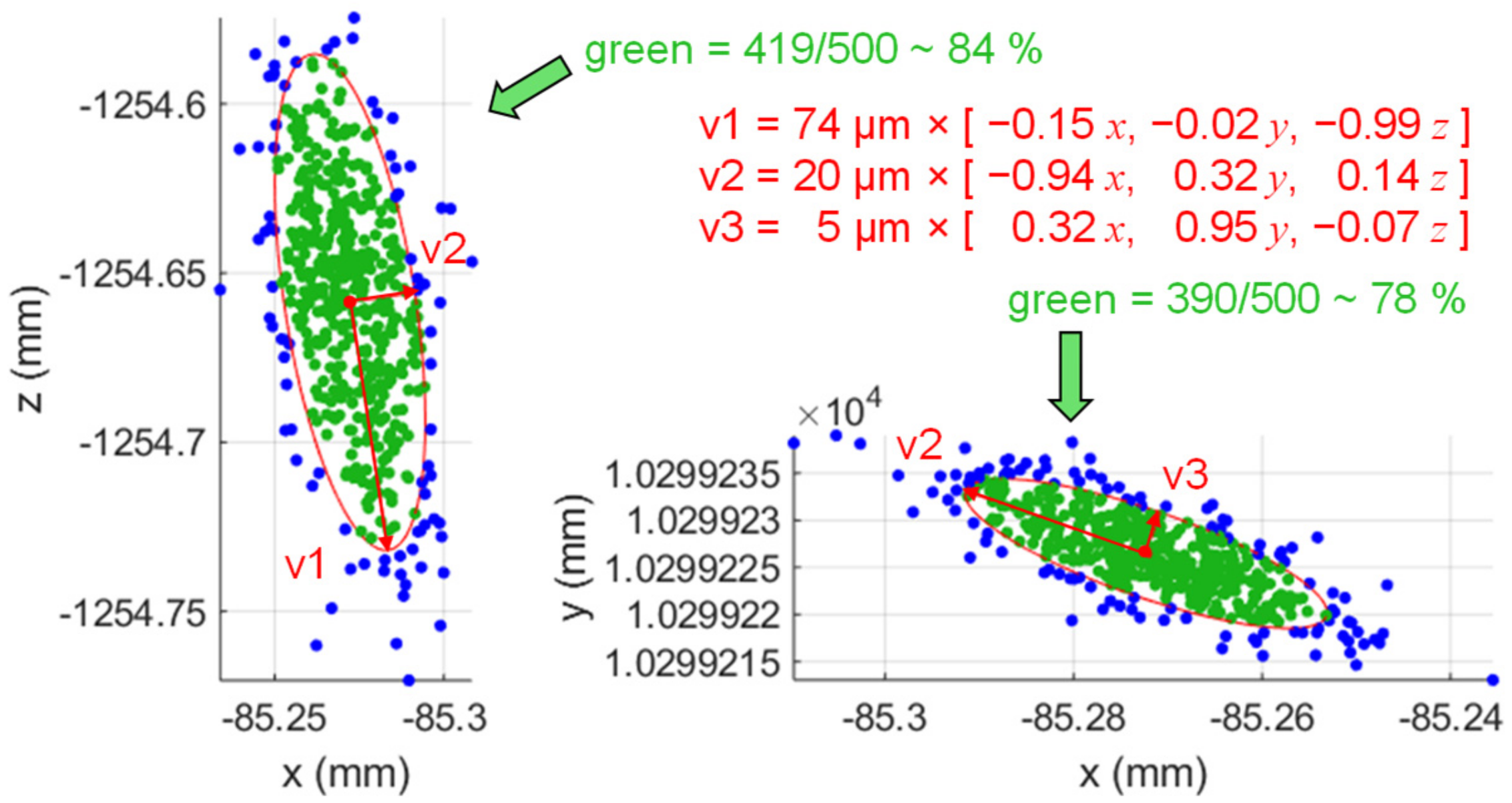
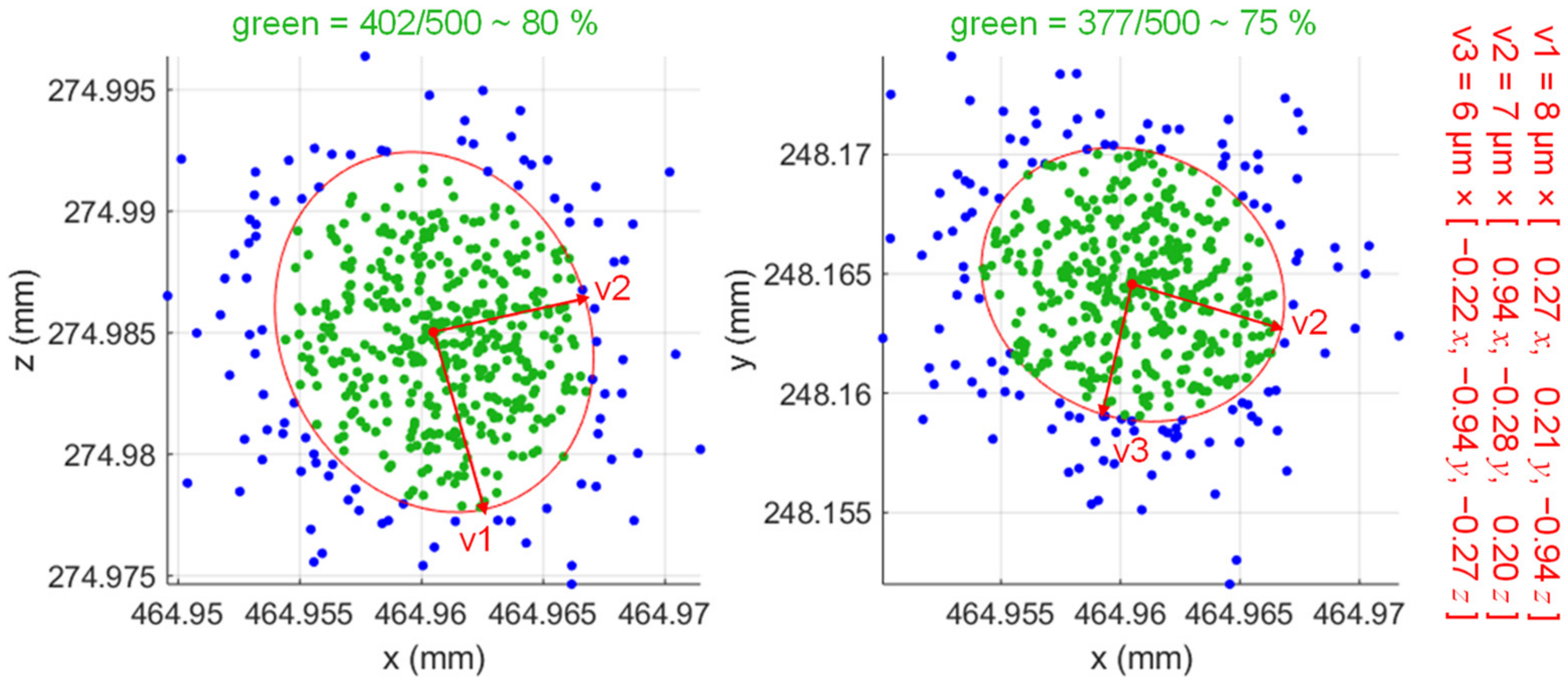
5.2. Monte-Carlo Simulations
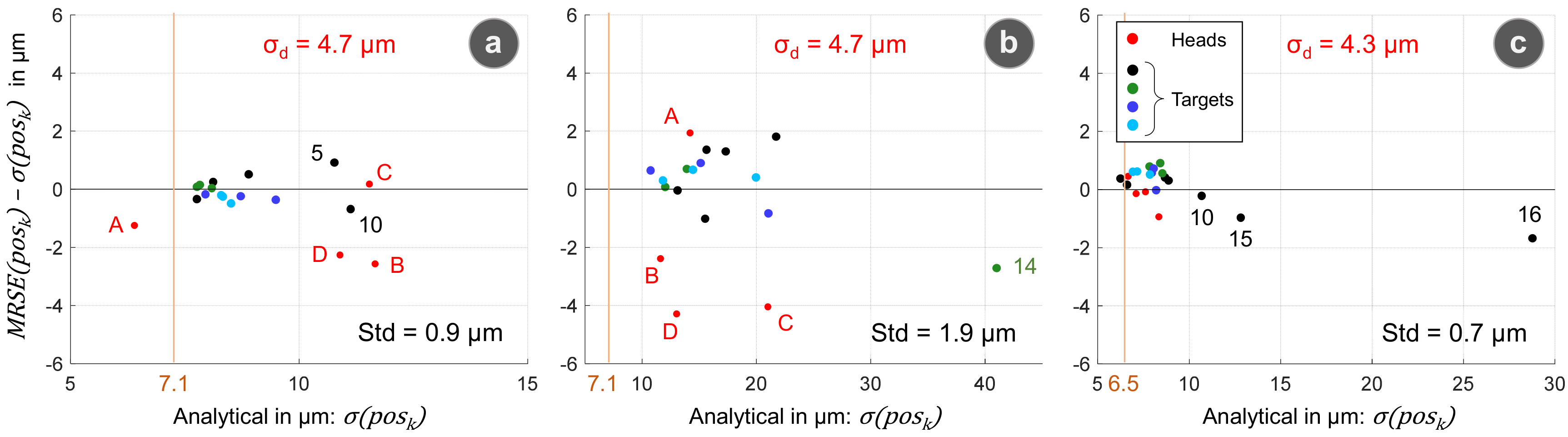
5.3. Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Guillory, J.; Truong, D.; Wallerand, J.-P. Assessment of the mechanical errors of a prototype of an optical multilateration system. Rev. Sci. Instrum. 2020, 91, 025004. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guillory, J.; Truong, D.; Wallerand, J.-P. Uncertainty assessment of a prototype of multilateration coordinate measurement system. Precis. Eng. 2020, 66, 496–506. [Google Scholar] [CrossRef]
- Guillory, J.; Truong, D.; Wallerand, J.-P.; Alexandre, C. Absolute multilateration-based coordinate measurement system using retroreflecting glass spheres. Precis. Eng. 2022, 73, 214–227. [Google Scholar] [CrossRef]
- Zhang, D.; Rolt, S.; Maropoulos, P.G. Modelling and optimization of novel laser multilateration schemes for high-precision applications. Meas. Sci. Technol. 2005, 16, 2541–2547. [Google Scholar] [CrossRef]
- Bönsch, G.; Potulski, E. Measurement of the refractive index of air and comparison with modified Edlén’s formulae. Metrologia 1998, 35, 133–139. [Google Scholar] [CrossRef]
- Nitsche, J.; Franke, M.; Haverkamp, N.; Heißelmann, D. Six-degree-of-freedom pose estimation with µm/µrad accuracy based on laser multilateration. J. Sens. Sens. Syst. 2021, 10, 19–24. [Google Scholar] [CrossRef]
- Rafeld, E.K.; Koppert, N.; Franke, M.; Keller, F.; Heißelmann, D.; Stein, M.; Kniel, K. Recent developments on an interferometric multilateration measurement system for large volume coordinate metrology. Meas. Sci. Technol. 2022, 33, 035004. [Google Scholar] [CrossRef]
- Nguyen, Q.K.; Kim, S.; Han, S.H.; Ro, S.K.; Kim, S.W.; Kim, Y.J.; Kim, W.; Oh, J.S. Improved Self-Calibration of a Multilateration System Based on Absolute Distance Measurement. Sensors 2020, 20, 7288. [Google Scholar] [CrossRef]
- Hughes, B.; Campbell, M.A.; Lewis, A.J.; Lazzarini, G.M.; Kay, N. Development of a high-accuracy multi-sensor, multi-target coordinate metrology system using frequency scanning interferometry and multilateration. In Proceedings of the Society of Photo-Optical Instrumentation Engineers (SPIE), Videometrics, Range Imaging, and Applications XIV, Munich, Germany, 26 June 2017; Volume 10332, p. 1033202. [Google Scholar]
- Salzenstein, P.; Pavlyuchenko, E. Uncertainty Evaluation on a 10.52 GHz (5 dBm) Optoelectronic Oscillator Phase Noise Performance. Micromachines 2021, 12, 474. [Google Scholar] [CrossRef]
- BIPM Stands for Bureau International des Poids et Mesures, GUM. Guide to the Expression of Uncertainty in Measurement, Fundamental Reference Document, JCGM100: 2008 (GUM 1995 Minor Corrections). Available online: https://www.bipm.org/en/publications/guides (accessed on 28 April 2022).
- Moona, G.; Kumar, V.; Jewariya, M.; Sharma, R. Measurement uncertainty assessment of articulated arm coordinate measuring machine for length measurement errors using Monte Carlo simulation. Int. J. Adv. Manuf. Technol. 2022, 119, 5903–5916. [Google Scholar] [CrossRef]
- Tripathy, R.; Bilionis, I.; Gonzalez, M. Gaussian processes with built-in dimensionality reduction: Applications to high-dimensional uncertainty propagation. J. Comput. Phys. 2016, 321, 191–223. [Google Scholar] [CrossRef] [Green Version]
- Chakraborty, S.; Chowdhury, R. An efficient algorithm for building locally refined hp—adaptive H-PCFE: Application to uncertainty quantification. J. Comput. Phys. 2017, 351, 59–79. [Google Scholar] [CrossRef]
- D’auria, F.; Debrecin, N.; Galassi, G.M. Outline of the Uncertainty Methodology Based on Accuracy Extrapolation. Nucl. Technol. 1995, 109, 21–38. [Google Scholar] [CrossRef]
- Navidi, W.; Murphy, W.S., Jr.; Hereman, W. Statistical methods in surveying by trilateration. Comput. Stat. Data Anal. 1998, 27, 209–227. [Google Scholar] [CrossRef]
- Norrdine, A. An Algebraic Solution to the Multilateration Problem. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Sydney, Australia, 13–15 November 2012. [Google Scholar]
- Benkouider, Y.K.; Keche, M.; Abed-Meraim, K. Divided Difference Kalman Filter for Indoor Mobile Localization. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Montbeliard-Belfort, France, 28–31 October 2013. [Google Scholar]
- Yunlong, T.; Shaopu, Y.; Pancunzhi. Research and application of localization algorithm based on wireless sensor networks. In Proceedings of the International Conference on Computer Science and Information Technology (ICCSIT), Chengdu, China, 9–11 July 2010. [Google Scholar]
- Kay, S.M. Fundamentals of Statistical Signal Processing: Estimation Theory; Prentice Hall: Upper Saddle River, NJ, USA, 1993; p. 141. [Google Scholar]
- Patwari, N.; Ash, J.N.; Kyperountas, S.; Hero, A.O.; Moses, R.L.; Correal, N.S. Locating the Nodes. IEEE Signal Process. Mag. 2005, 22, 54–69. [Google Scholar] [CrossRef]
- Chaffee, J.; Abel, J. GDOP and the Cramer-Rao bound. In Proceedings of the Position, Location and Navigation Symposium (PLANS), Las Vegas, NV, USA, 11–15 April 1994; pp. 663–668. [Google Scholar]
- Mitchell, J.; Spence, A.; Hoang, M.; Free, A. Sensor fusion of laser trackers for use in large-scale precision metrology. In Proceedings of the Photonics Technologies for Robotics, Automation, and Manufacturing, Providence, RI, USA, 27–31 October 2003. [Google Scholar]
- Wang, B.; Shi, W.; Miao, Z. Confidence analysis of standard deviational ellipse and its extension into higher dimensional euclidean space. PLoS ONE 2015, 10, 17. [Google Scholar] [CrossRef]
- Lin, Y.; Zhang, G. The optimal arrangement of four laser tracking interferometers in 3D coordinate measuring system based on multi-lateration. In Proceedings of the International Symposium on Virtual Environments, Human-Computer Interfaces and Measurement Systems (VECIMS), Lugano, Switzerland, 27–29 July 2003; pp. 138–143. [Google Scholar]
- Xue, S.; Yang, Y.; Dang, Y.; Chen, W. A Conditional Equation for Minimizing the GDOP of Multi-GNSS Constellation and Its Boundary Solution with Geostationary Satellites. In IAG 150 Years; International Association of Geodesy Symposia: Postdam, Germany, 2013. [Google Scholar]
- Ma, Z.; Ho, K.C. TOA localization in the presence of random sensor position errors. In Proceedings of the International Conference on Acoustics, Speech and Signal Processing (ICASSP), Prague, Czech Republic, 22–27 May 2011. [Google Scholar]
- Kumar, V. Cooperative Localization and Tracking of Resource-Constrained Mobile Nodes. Ph.D. Thesis, School of Information Technology and Electrical Engineering, University of Queensland, Brisbane, QLD, Australia, 2018. Available online: https://espace.library.uq.edu.au/view/UQ:3b1bfbd (accessed on 14 March 2020).
- Sun, M.; Yang, L.; Ho, K.C. Accurate sequential self-localization of sensor nodes in closed-form. Signal Process. 2012, 92, 2940–2951. [Google Scholar] [CrossRef]
- Zhuang, H.; Li, B.; Roth, Z.S.; Xie, X. Self-calibration and mirror center offset elimination of a multi-beam laser tracking system. Robot. Auton. Syst. 1992, 9, 255–269. [Google Scholar] [CrossRef]
- Trébert, A. De la sphère tangente a quatre sphères données. Nouv. Ann. Math. J. Candidats Aux Écoles Polytech. Et Normale. 1844, 3, 101–111. [Google Scholar]
- Kasmi, Z.; Norrdine, A.; Blankenbach, J. Platform Architecture for Decentralized Positioning Systems. Sensors 2017, 17, 957. [Google Scholar] [CrossRef] [Green Version]
- Moses, R.L.; Patterson, R. Self-Calibration of Sensor Networks. In Proceedings of the AeroSense, Orlando, FL, USA, 1–5 April 2002. [Google Scholar]
- Donaldson, J.R.; Schnabel, R.B. Computational experience with confidence regions and confidence intervals for nonlinear least squares. Technometrics 1987, 29, 67–82. [Google Scholar] [CrossRef]
- D’Errico, J. Adaptive Robust Numerical Differentiation. Numerical Derivative of an Analytically Supplied Function, also Gradient, Jacobian & Hessian, Version 1.6. 2007. Available online: https://fr.mathworks.com/matlabcentral/fileexchange/13490-adaptive-robust-numerical-differentiation (accessed on 14 March 2020).
- Bell, B. ME5000 Test Measurements. In Proceedings of the Workshop on the Use and Calibration of the Kern ME5000 Mekometer, Standford, CA, USA, 18–19 June 1992. [Google Scholar]
- Braun, J.; Štroner, M.; Urban, R.; Dvořáček, F. Suppression of Systematic Errors of Electronic Distance Meters for Measurement of Short Distances. Sensors 2015, 15, 19264–19301. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Leick, A.; Rapoport, L.; Tatarnikov, D. GPS Satellite Surveying, 4th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2015; p. 61. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Measured Distance | Experimental Results | Monte-Carlo Simulations | Direct Measurements | ||||
|---|---|---|---|---|---|---|---|---|
| d1 (mm) | σ1 (µm) | d2 (mm) | σ2 (µm) | d3 (mm) | σ3 (µm) | |||
| small volume, corner cube | triplet 1 | ‖T1–T2‖ | 150.030 | 6.5 | 150.030 | 6.4 | 150.022 | 7.1 |
| ‖T2–T3‖ | 174.628 | 7.2 | 174.628 | 7.2 | 174.615 | |||
| ‖T1–T3‖ | 324.657 | 6.9 | 324.657 | 6.9 | 324.636 | |||
| triplet 2 | ‖T6–T7‖ | 150.022 | 6.1 | 150.022 | 7.0 | 150.022 | ||
| ‖T7–T8‖ | 174.637 | 6.7 | 174.637 | 6.7 | 174.615 | |||
| ‖T6–T8‖ | 324.657 | 6.3 | 324.658 | 6.8 | 324.636 | |||
| triplet 3 | ‖T12–T13‖ | 150.018 | 5.9 | 150.018 | 5.7 | 150.022 | ||
| ‖T13–T14‖ | 174.609 | 6.0 | 174.608 | 5.9 | 174.615 | |||
| ‖T12–T14‖ | 324.625 | 6.0 | 324.624 | 5.9 | 324.636 | |||
| large volume, corner cube | 3 couples | ‖T1–T2‖ | 324.088 | 5.6 | 324.088 | 6.4 | 324.071 | |
| ‖T3–T4‖ | 324.082 | 4.6 | 324.081 | 5.0 | 324.071 | |||
| ‖T5–T6‖ | 324.067 | 5.0 | 324.067 | 5.5 | 324.071 | |||
| 3 pillars | ‖T12–T13‖ | 2232.049 | 4.3 | 2232.049 | 4.8 | 2232.037 | ||
| ‖T13–T14‖ | 6700.461 | 3.8 | 6700.461 | 5.1 | 6700.471 | |||
| ‖T12–T14‖ | 8932.505 | 4.1 | 8932.506 | 5.3 | 8932.509 | |||
| small volume, glass sphere | triplet 1 | ‖T2–T3‖ | 150.090 | 3.7 | 150.091 | 4.0 | 150.096 | |
| ‖T3–T4‖ | 174.410 | 3.6 | 174.411 | 4.0 | 174.410 | |||
| ‖T2–T4‖ | 324.498 | 3.7 | 324.500 | 4.1 | 324.506 | |||
| triplet 2 | ‖T5–T6‖ | 150.087 | 5.4 | 150.087 | 5.6 | 150.096 | ||
| ‖T6–T7‖ | 174.427 | 5.2 | 174.424 | 5.9 | 174.410 | |||
| ‖T5–T7‖ | 324.512 | 5.3 | 324.509 | 5.8 | 324.506 | |||
| triplet 3 | ‖T9–T10‖ | 150.116 | 7.5 | 150.114 | 7.9 | 150.096 | ||
| ‖T10–T11‖ | 174.415 | 7.0 | 174.419 | 7.7 | 174.410 | |||
| ‖T9–T11‖ | 324.529 | 7.2 | 324.531 | 7.6 | 324.506 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guillory, J.; Truong, D.; Wallerand, J.-P. Multilateration with Self-Calibration: Uncertainty Assessment, Experimental Measurements and Monte-Carlo Simulations. Metrology 2022, 2, 241-262. https://doi.org/10.3390/metrology2020015
Guillory J, Truong D, Wallerand J-P. Multilateration with Self-Calibration: Uncertainty Assessment, Experimental Measurements and Monte-Carlo Simulations. Metrology. 2022; 2(2):241-262. https://doi.org/10.3390/metrology2020015
Chicago/Turabian StyleGuillory, Joffray, Daniel Truong, and Jean-Pierre Wallerand. 2022. "Multilateration with Self-Calibration: Uncertainty Assessment, Experimental Measurements and Monte-Carlo Simulations" Metrology 2, no. 2: 241-262. https://doi.org/10.3390/metrology2020015
APA StyleGuillory, J., Truong, D., & Wallerand, J.-P. (2022). Multilateration with Self-Calibration: Uncertainty Assessment, Experimental Measurements and Monte-Carlo Simulations. Metrology, 2(2), 241-262. https://doi.org/10.3390/metrology2020015