Abstract
Railway infrastructures necessitate the inspection of various elements to ensure operational safety. This study concentrates on five key components: rail, sleepers and ballast, track geometry, and catenary. The operational principles of the primary defect measurement sensors are elaborated, emphasizing the use of ultrasound, eddy currents, active and passive optical elements, accelerometers, and ground penetrating radar. Each sensor type is evaluated in terms of its advantages and limitations. Examples of mobile inspection platforms are provided, ranging from laboratory trains to draisines and track trolleys. The authors foresee future trends in railway inspection, including the implementation of IoT sensors, autonomous robots, and geospatial intelligence technologies. It is anticipated that the integration of sensors within both infrastructure and rolling stock will enhance maintenance and safety, with an increased utilization of autonomous robotic systems for hazardous and hard-to-reach areas.
1. Introduction
The railway has been one of the most important means of transporting people and goods over the past two centuries, revolutionizing the way individuals and cargo are moved, enabling greater speed and efficiency in commerce and industry. Additionally, the railway had a significant social and cultural impact, as it shortened distances between cities and facilitated the exchange of ideas and customs between different regions [1,2,3].
The world’s first railway line was built in England in 1825, connecting Stockton and Darlington. Edward Pease, the promoter of the company, appointed George Stephenson as chief engineer. In 1830, progress continued with the construction of the passenger railway between Liverpool and Manchester, also in England, further solidifying this mode of transportation. This line was followed by others, such as the London–Wolverton in England and the Liège–Namur in Belgium. Over the years, railway lines have expanded throughout much of Europe and America [4,5].
Since their inception to the present day, a huge number of rail infrastructures have been developed and operated across all continents. The railway has undergone a continuous process of improvement and technological innovation in both rolling stock and infrastructure. Notable milestones include gas lamp lighting (1858), the introduction of the dining car (1863), the first underground railway (1863), line electrification (1885), and the development of the first high-speed train, the Shinkansen in Japan (1964) [6].
High-speed rail refers to trains designed to operate at speeds exceeding 250 km/h on specially adapted tracks. Since the inauguration of the Shinkansen in Japan, this railway modality has revolutionized land transportation, offering a fast, safe, and sustainable alternative that competes with other modes such as air travel. Countries like France, Spain, and China have led the development of this technology, which has enhanced regional connectivity and significantly reduced travel times [7]. High-speed rail lines have very specific technical and operational requirements to ensure safety, efficiency, and comfort. These requirements affect infrastructure, rolling stock, electrification standards, operation and maintenance, and legal and regulatory compliance [8,9,10].
Layout and geometry of the infrastructure require wide curve radii to minimize centrifugal force, gentle slopes (e.g., lower than 3.5%), and straight, aligned corridors to avoid unnecessary braking. Tracks feature continuous welded rails to reduce vibration and noise, high quality ballast or concrete pads (slab track) for stability, and separation of high-speed tracks from conventional tracks. Automatic signaling systems allow continuous speed control. Regarding safety, all the lines are fenced to prevent unauthorized access, bridges and underpasses are preferred to level crossings, and detections systems such as side wind or earthquake are installed [11,12]. Rolling stock design requires optimized aerodynamics to reduce air resistance, advanced braking systems (e.g., electric, regenerative, magnetic), and active suspension for increased comfort at high speeds. Technical performance includes compatibility with electrification and signaling systems and the capability to operate at speeds above 250 km/h (typically between 300 and 350 km/h) [13,14]. Power supply systems rely on high voltage alternating current (25 kV, 50 Hz in Europe) and robust and well-tensioned overhead catenary systems to avoid disconnections. Trains use regenerative braking to feed energy back into the grid, supported by energy management systems [15,16]. Train operations involve dedicated control centers that monitor train operations in real time. Preventive maintenance includes regular inspection of tracks, catenary, and rolling stock, and use of diagnostic trains to assess infrastructure conditions. Punctuality and frequency of the operations is very important, thus systems that minimize stopping time are required [17]. Certification and compliance with national and international standards are required, as well as laboratory testing of speed, braking, and emergency systems testing prior to service commissioning [18].
This scientific review focuses on the technical means and methods used for the inspection of railway infrastructure, specifically targeting the catenary, tracks, and their associated components. Ensuring an approachable work, the scope does not include aspects such as the inspection of tunnels, bridges, or slopes. Section 2 provides an overview of the various pathologies and maintenance challenges that arise due to the aging and operational use of the infrastructure, particularly concerning the catenary and tracks. Section 3 focuses on the physical principles of inspection systems. Section 4 shows the existing commercial technologies available for inspection tasks. Finally, Section 5 presents the future trends in high-speed railway auscultation technology and Section 6 addresses the main conclusions of the work.
2. Maintenance Challenges in Railway Track Infrastructure
Railway track infrastructure comprises several critical components that are susceptible to deterioration due to operational stresses, environmental factors, and material aging. Understanding the specific degradation mechanisms affecting each component is essential for effective maintenance and operational safety. Although degradation affects many infrastructure components (Figure 1), the authors focus on the following safety-critical ones, based on their expertise: rails, sleepers, ballast, track geometry, and catenary systems [19,20,21].
Figure 1.
Examples of railway deterioration: Excess of ballast on sleepers (top left), crack in concrete sleeper that has triggered a fracture (top center), crack caused by screw stress (top right), sand on the railway that induces rail-wheel wear (bottom left) and turned clip due to lack of screw tightening (bottom right). red circle: It is an example of sand inside the railway path.
2.1. Rail Degradation
Continuous wheel–rail interaction induces significant stress on rails, leading to material wear and the initiation of fatigue cracks. Over time, these cracks can propagate, increasing the risk of rail fractures if not addressed promptly. Studies have highlighted the need for accurate quantification of rail wear and a comprehensive understanding of the interactions between track components to predict deterioration effectively and comply with current regulations and maintenance guidelines [22]. High contact stresses, especially in curves and high-load areas, can cause surface-initiated cracks known as RCF. These cracks may lead to rail failures if they are not detected, and mitigation methods are applied soon. Research indicates that RCF is a prevalent issue in railway operations, necessitating regular monitoring and maintenance strategies to manage its impact. Abnormal movement of the wheel can cause rail corrugation, which can further lead to rail fractures. Squats, wheel burns, spalling, and shelling defects can grow into large areas and damage the wheel. In certain circumstances, head checks can start to split open into bigger defects and the head of the rail may become crushed. Cracks can also develop on the rail’s side and web, potentially splitting the rail, while fishplates and other fastenings may break or fracture over time [23,24,25,26,27].
2.2. Sleepers Degradation
Sleepers, whether made of wood or concrete, deteriorate over time. Wooden sleepers are prone to rot and pest infestation, while concrete sleepers can develop cracks due to mechanical stresses and environmental exposure. Concrete sleepers can also present deterioration as abrasion and breakage. Inclined cracks often develop at the bottom corners of sleepers due to excessive shear loads and improper tamping, while map-like cracks result from material issues, manufacturing defects, or environmental factors, potentially reducing their lifespan. Rail seat abrasion (RSA) is another common issue, where prolonged friction between the rail pad and sleeper wears down the concrete surface, affecting track geometry and potentially causing gauge widening. Breakage and spalling, often due to excessive external loads during transportation of maintenance, further compromise sleeper integrity. Environmental factors like temperature fluctuations, moisture, and freeze–thaw cycles contribute to material fatigue and cracking, while dynamic loads from passing trains induce stress that can lead to sleeper fatigue. Manufacturing defects, such as improper curing or substandard materials, can also accelerate deterioration. The components that secure rails to sleepers, such as clips and bolts, can loosen or corrode over time, compromising track stability. Monitoring the condition of these fasteners is crucial, as their failure can lead to gauge widening and an increased risk of derailment. Studies have shown that inadequate maintenance of fastening systems contributes significantly to track geometry deterioration [28,29,30,31]. In grade 1, the tie shows no cracks, and the shoulders are tight. In grade 5, the concrete exhibits transverse and/or longitudinal cracks. There is a loss of clip load, and the cracks are wide. Large cracks in the shoulder have merged. The tie may also show crumbling or breaking apart in the shoulder/rail seat area. The tie is structurally ineffective, considered defective, and must be replaced.
2.3. Ballast Degradation
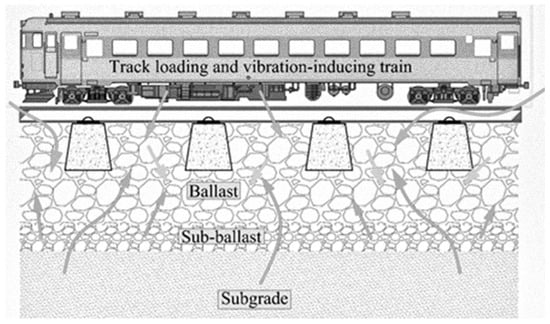
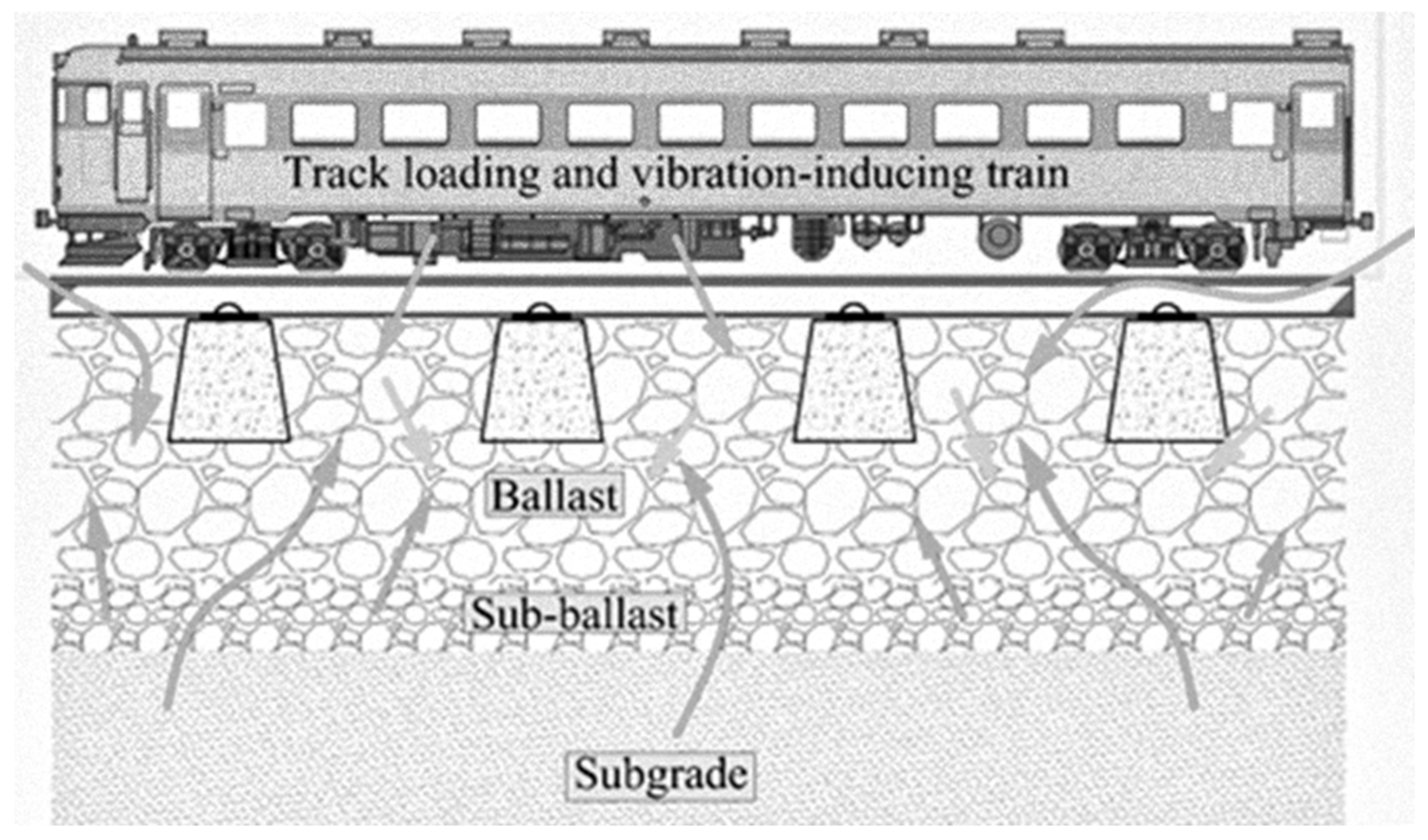
Ballast, the layer of crushed stones supporting the track, degrades under repeated loading, leading to particle breakage and settlement. A significant share of this degradation also occurs during maintenance operations such as tamping, which, while restoring track geometry, can accelerate particle fragmentation and rearrangement. Contamination with fine particles, known as ballast fouling, reduces drainage and track support, accelerating track geometry degradation. In some cases, ballast displacements may occur, affecting its load-bearing capacity. Research into track deterioration models highlights ballast degradation as a critical factor influencing overall track performance [32,33,34,35,36] and requires frequent inspections to comply with safety guidelines and regulations [37]. Figure 2 shows a scheme of ballast degradation and contamination.
Figure 2.
Scheme of ballast degradation. Includes surface infiltration (coal and fines), ballast fragmentation by attrition, and upward migration of finer particles from sub-ballast and subgrade.
2.4. Track Geometry
Track geometry suffers alignment and leveling issues. Operational loads and environmental factors can cause track misalignment and uneven settlement, leading to geometry degradation. Accurate information of track geometry deterioration is essential for optimal scheduling of maintenance and renewal activities [38,39,40,41] to ensure regulation compliance [42].
2.5. Catenary
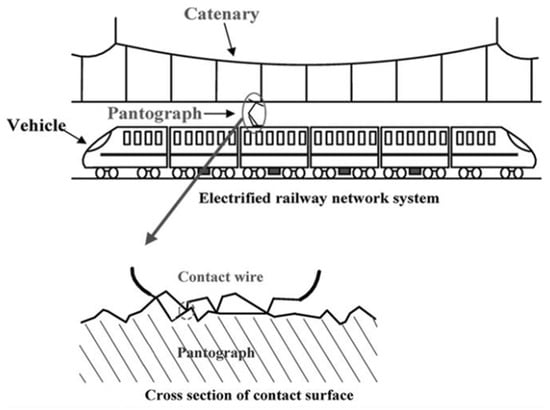
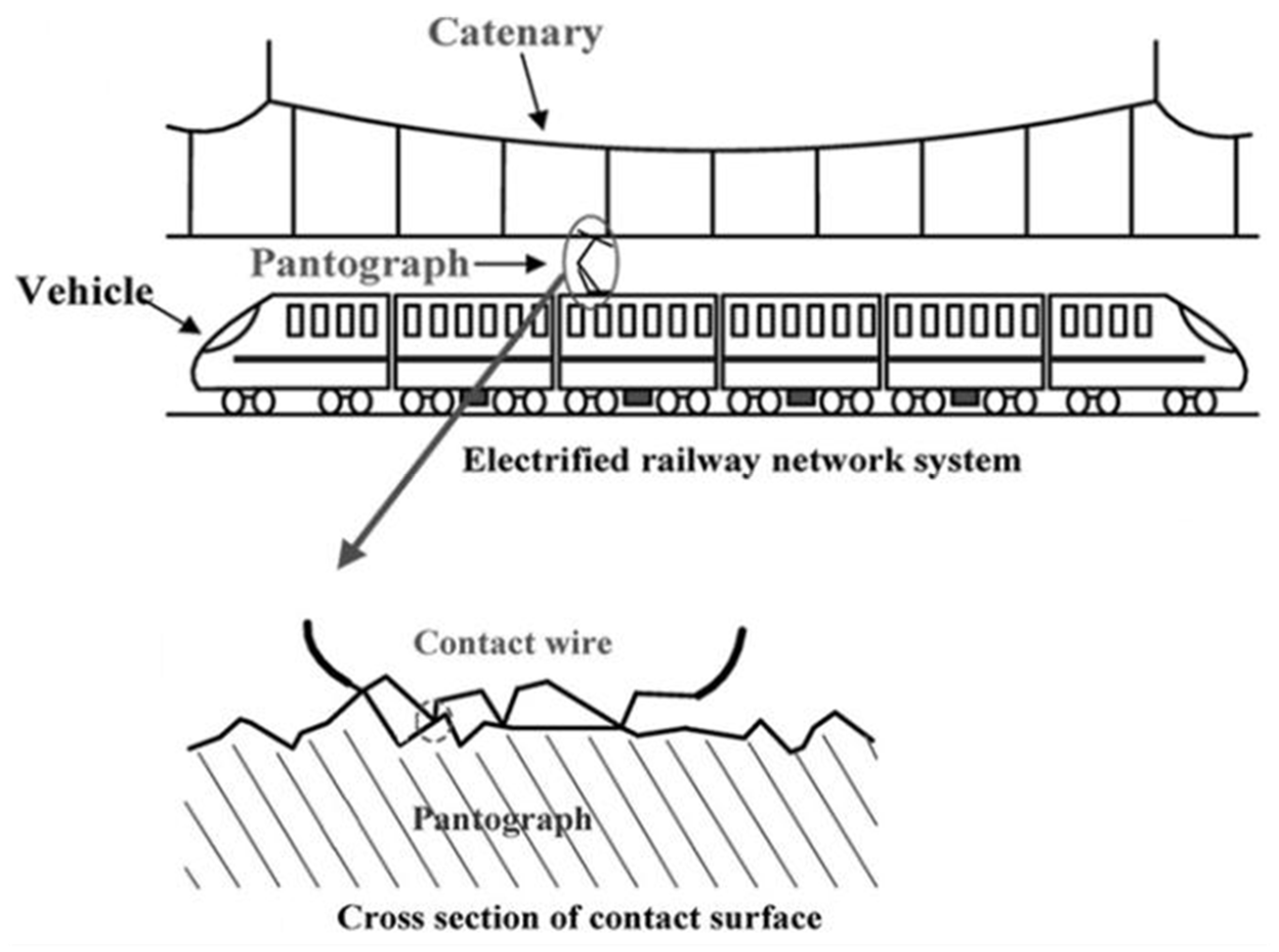
Catenary systems, responsible for delivering electrical power to trains, are also prone to deterioration. The overhead line equipment, including contact wires and droppers, experiences wear due to continuous mechanical and electrical loading. Failures in these components can lead to significant disruptions. A systematic analysis of maintenance records has identified droppers and jumpers as critical components requiring effective maintenance to ensure safe and reliable railway operations. Catenary systems are exposed to environmental factors such as temperature fluctuations, wind, and precipitation. These conditions can cause material fatigue, corrosion, and mechanical failures. For instance, aerodynamic instability can induce catenary galloping, leading to disruptions in the electrical connection and potential damage to suspension components. Dewirement occurs when the contact wire detaches from the train’s pantograph, potentially causing extensive damage to the overhead line equipment over considerable distances. This not only presents safety risks but also results in significant repair expenses and operational downtime [43,44,45,46,47]. To mitigate these risks and ensure the reliability of catenary systems, adherence to established standards is essential. EN 50119:2020 provides comprehensive requirements for the design, installation, and maintenance of electric traction overhead contact lines [48]. Figure 3 shows a scheme of catenary deterioration.
Figure 3.
Scheme of catenary deterioration.
3. Physical Principles of Sensing Systems
The measurement of the pathologies in railway tracks is based on the use of multiple sensors with different physical measurement principles, which are detailed below.
3.1. Rail Degradation
Ultrasonic testing (UT) sensors use high-frequency sound waves that propagate through the rail. Defects cause the waves to scatter or reflect, which the sensors can detect. They are effective for detecting internal defects like rolling contact fatigue (RCF), transverse fissures, and head checks. Eddy current testing (ECT) sensors use electromagnetic induction to detect changes in material conductivity, revealing surface and near-surface cracks that disrupt the eddy current flow. They are suitable for detecting surface-initiated cracks like RCF, squats, and head checks. Optical systems use laser beams or high-speed cameras to scan the rail surface, detecting deformations or wear patterns. They measure rail wear, corrugation, and surface defects like squats and spalling. Acoustic emission (AE) sensors detect stress waves generated by crack initiation and propagation within the rail structure. They monitor fatigue crack growth in real time and helps in early defect detection. Magnetic flux leakage (MFL) sensors use a strong magnetic field to magnetize the rail. Discontinuities in the field, caused by cracks or material loss, are detected by the sensors. They are applied to detect deep-seated defects and corrosion in rails. Accelerometers and vibration sensors measure dynamic response of the rail (vibration and acceleration) to passing trains. Irregularities in these responses indicate defects, detecting rail corrugation, track stiffness variations, and localized defects [49,50,51,52]. Table 1 shows a comparison of the main sensor systems, their advantages and limitations.

Table 1.
Comparison of the main sensor systems used for rail defect measurement, including their advantages and limitations.
3.2. Sleeper Degradation
Ultrasonic testing (UT) uses high-frequency sound waves that propagate through the sleeper material. Defects such as cracks or voids cause reflections, which are analyzed to detect internal damage. It identifies internal cracks, delaminations, and material degradation in concrete sleepers. Ground penetrating radar (GPR) uses electromagnetic waves which are transmitted into the sleeper and surrounding ballast. Differences in dielectric properties indicate material degradation, moisture intrusion, or structural defects. It assesses sleeper integrity and detects subsurface defects. Vibration-based monitoring measures the dynamic responses (acceleration, velocity, displacement) of sleepers under train loads. Changes in vibration characteristics can indicate structural weakening or fastener loosening. It identifies sleeper fatigue and evaluates fastening system integrity. Acoustic emission (AE) captures high-frequency stress waves generated by crack initiation and propagation in the sleeper. It allows real-time monitoring of crack growth and early-stage damage detection. Gauges measure strain variations in sleepers by detecting deformations due to mechanical loads. Fiber Bragg grating (FBG) sensors use light wavelength shifts in optical embedded fibers to detect the strain changes. They monitor mechanical stresses and sleeper fatigue. Electrical resistivity and capacitance sensors detect changes in moisture content and material integrity through variations in electrical properties. They evaluate sleeper material degradation, moisture intrusion, and environmental effects. Vision-based systems use cameras or infrared sensors to detect surface cracks, spalling, and material degradation by analyzing thermal signatures or visible anomalies. They are applied to surface-level crack detection and wear analysis [53,54,55,56,57]. Table 2 shows a comparison of the sensors used for monitoring sleeper degradation, their advantages and limitations.
Table 2.
Comparison of the main sensor systems used for sleeper degradation measurement, including their advantages and limitations.
3.3. Ballast
Accelerometers measure vibration using piezoelectric elements or MEMS technology, detecting ballast movement and impact loads. Ground penetrating radar (GPR) uses electromagnetic waves to detect subsurface materials. Fiber Bragg grating (FBG) sensors measure strain and temperature through wavelength shifts in optical fibers, detecting ballast settlement and load distribution. Linear variable differential transformers (LVDT) measure displacement through variations in magnetic coupling. Geophones convert ground vibrations into electrical signals. Pressure cells measure pressure changes due to ballast loading, evaluating ballast stress distribution and compaction [58,59,60]. Table 3 shows the advantages and limitations of the sensors used for ballast monitoring.
Table 3.
Comparison of the main sensor systems used for ballast degradation measurement, including their advantages and limitations.
3.4. Track Geometry
Various sensor systems are used to evaluate track geometry performance. Inertial Measurement Units (IMUs) are compact and suitable for in-service monitoring but suffer from drift over time. Laser-based systems provide high-precision measurements at high speeds but are sensitive to environmental conditions. GPS-based systems offer absolute positioning but have reduced accuracy in tunnels or urban areas. Vision-based systems, using cameras and AI, detect visible defects effectively but require significant computational power and adequate lighting conditions [61,62,63,64,65]. Table 4 shows the advantages and limitations of the sensors used for track geometry measurement.
Table 4.
Comparison of the main sensor systems used for track geometry measurement, including their advantages and limitations.
3.5. Catenary
Monitoring railway catenary deterioration relies on various physical principles. Electromagnetic induction detects material wear and cracks through changes in eddy currents or magnetic flux, offering a non-contact method but with limited penetration depth. Acoustic emission (AE) captures stress-induced high-frequency waves, allowing early failure detection but being sensitive to background noise. Vibration analysis identifies structural weaknesses by analyzing frequency changes, although external factors like wind can interfere. Optical and laser-based techniques (e.g., LIDAR) provide high-precision, long-distance monitoring but are costly and sensitive to environmental conditions. Thermal imaging detects overheating due to electrical resistance changes, yet it is ineffective for structural defects. Electrical resistance and contact force monitoring assess wear-related electrical performance and pantograph interaction but require frequent calibration. Combining multiple methods enhances reliability, ensuring comprehensive monitoring of catenary system health [66,67,68,69]. Table 5 shows the advantages and limitations of the sensors used for catenary measurement.
Table 5.
Comparison of the main sensor systems used for catenary measurement, including their advantages and limitations.
4. Commercial Systems Used for High-Speed Railway Track Inspection
In the following section, the different existing commercial inspection systems for railway track condition assessment are presented, as well as the measuring platforms used.
4.1. Measurement Platforms
Most measuring instruments for railroad line inspection must be mounted on mobile platforms for deployment on the infrastructure. The following are the main platforms used, according to their speed, size, and data acquisition capacity.
4.1.1. Laboratory and Service Trains
Laboratory trains are designed for the dynamic and geometric inspection of track and catenary, as well as for the testing and supervision of ASFA (Announcement of Signals and Automatic Braking) [70], ERTMS (European Rail Traffic Management System) [71] and GSM-R (Global System for Mobile Communications—Railway) [72]. They are also equipped for the real-world testing of aerodynamic phenomena occurring in tunnels when a high-speed train passes through, commercial operation simulations, and all necessary tests to validate new infrastructure equipment, allowing for the analysis of its impact on rolling stock circulation. High speeds are used, allowing synchronization with traditional railway operations. Their composition typically consists of two locomotives at the ends to facilitate bidirectional travel, two laboratory cars where sensors for track inspection are integrated, and a third car used to transport personnel. Like laboratory airplanes in aviation, laboratory trains in the railway sector are conventional high-speed train models adapted for the integration of measurement and data processing elements, depending on the types of defects to be detected. ADIF Seneca in Spain [73], Dr. Yellow in Japan [74], or TGV Iris 320 in France [75] are examples of laboratory trains in operation by railway managers (Figure 4). Aside from the high-speed platforms, there are also medium-speed alternatives such as Polish State Railways PKP Intercity’s diagnostic train, which operates at lower speeds but is equipped with a wide range of inspection technologies suited for conventional rail lines [76]. On the other hand, other alternatives such as Deutzer, instead of using laboratory trains, install measurement devices on regular service trains, enabling continuous monitoring without the need for dedicated inspection runs [77].
Figure 4.
Examples of laboratory trains: Seneca (left), Dr. Yellow (center), and Iris 320 (right).
4.1.2. Draisines
Draisine vehicles are lightweight vehicles designed to run on railway tracks at medium or low speeds. Their main function is to facilitate the maintenance, inspection, and repair of railway infrastructure, as well as to assist in the rescue of broken-down trains. Originally, the first draisines were manually operated or pedal-powered, but over time they evolved to incorporate internal combustion or electric engines. Inspection draisines typically operate at speeds between 30 and 60 km/h. Since they run at lower speeds than high-speed trains, strict planning and coordination are required to avoid disruptions to rail traffic. For this reason, inspection and maintenance windows are scheduled—specific periods, often during night hours or low-demand times, when the tracks are free of conventional traffic. Temporary blockages of the track section where the draisine is working are often established to ensure safety. Additionally, draisines are equipped with devices that monitor and communicate their position to the railway control system, enabling them to integrate into the network granting the same safety standards as a conventional train. Draisine operators maintain constant communication with the railway traffic control center to effectively coordinate their operations. Figure 5 shows two examples of draisines.
Figure 5.
Examples of draisines: Plasser DIC 62N (left) [78] and Plasser DIC 40 (right) [79].
4.1.3. Rail Trolley
Rail trolleys, also known as maintenance trolleys, are lightweight vehicles designed to travel along railway tracks. They are primarily used for maintenance and transportation purposes within the railway industry. Rail trolleys help crews access hard-to-reach areas, carry tools and equipment, and perform track inspections at low speeds in a safe manner. Trolleys are typically operated by hand when used for short distances and light loads. If distances are longer, they can be electrically powered. Since rail trolleys always operate at low speeds, they are used in situations where track operations need to be suspended or during the pre-commercial phases of track development, such as during the construction phase of infrastructure [80,81].
4.2. Commercial Measurement Systems
Below is a selection of various commercial inspection systems, categorized according to the technology used.
4.2.1. Ultrasonic Systems
Ultrasonic rail testing is a full-track inspection solution that uses high-frequency waves to scan rails and sleepers, identifying internal flaws that require repair. Typically, they are used in combination with certified inspectors for data analysis. They can be installed in rail trolleys or draisines. Fluid must be continuously provided to keep the contact between the rail and the sensing system. This fact limits the setup and inspection speed [82,83,84].
4.2.2. Ground Penetrating Radar
Ground penetrating radar (GPR) is indicated for railway track beds inspection, ballast and subsurface defects. A coupling fluid is not required between the sensor and the element to be inspected, but the working distance must be short (typically a few centimeters). The radar frequency is selected based on the required penetration depth and resolution. Higher frequencies provide better resolution but lower penetration capability [85,86].
4.2.3. Eddy Current Testing (ECT)
Eddy current testing utilizes electromagnetic fields to detect surface and near-surface defects in conductive materials, making it particularly useful in the railway industry for identifying cracks, corrosion, or other anomalies in tracks and wheels without the need for dismantling. This method offers several advantages, including high sensitivity, as it can detect even minute cracks before they propagate, as well as speed and efficiency, enabling rapid, on-site inspections. Additionally, modern systems can be integrated with automated inspection vehicles, allowing for continuous rail monitoring and enhancing overall safety and maintenance efficiency [87,88].
4.2.4. Optical Systems
Computer vision-based systems have transformed railway inspection by automating defect detection, enhancing safety, and reducing maintenance costs. These systems utilize high-resolution cameras, LiDAR, infrared sensors, and AI-driven image processing to assess railway tracks, rolling stock, and infrastructure in real time. For track inspection, they detect cracks, wear, misalignments, gauge variations, and ballast displacement. Especially, those based on LiDAR can provide accurate geometric information in a resulting point cloud. In rolling stock, they identify wheel defects, pantograph issues, and brake wear. Overhead line and tunnel assessments ensure catenary wire integrity and structural soundness, while AI-powered object detection enhances level crossing safety by identifying obstacles on tracks. These systems provide real-time monitoring, predictive maintenance, and even leverage autonomous drones for hard-to-reach areas. The benefits include improved accuracy, cost efficiency, faster inspections, and enhanced safety, ultimately minimizing disruptions and preventing accidents. They can be included in laboratory trains, draisines and rail tracks. However, these payloads can be affected by factors such as dust, oil residues, and exhaust particles, which may degrade sensor performance and image quality. Therefore, regular cleaning protocols, sensor calibration, and robust filtering algorithms are essential to mitigate the impact of pollution on measurement accuracy. Additionally, some optical sensors, such as RGB cameras, are sensitive to operating conditions like lighting and train speed, which can compromise proper image exposure and even cause motion blur in the acquired data. To compensate for this, several solutions implement active LED lighting to ensure stable and consistent illumination, thereby enhancing the robustness of these approaches. Nevertheless, the use of these technologies may still be limited in adverse conditions such as rain or fog, and it may be necessary to implement complementary sensors or alternative inspection methods to ensure complete coverage [89,90,91].
4.2.5. Vibration Based Monitoring
Vibration-Based Monitoring (VBM) is an advanced technique used in railway inspection to detect and diagnose faults in both infrastructure and rolling stock through vibration analysis. This method relies on data acquisition from accelerometers mounted on trains or directly on the tracks, enabling the identification of irregularities in rails, sleepers, joints, and suspension systems. Typically, these sensors operate within a frequency range of 0.5 Hz to 10 kHz, capturing both low-frequency structural deformations and high-frequency anomalies caused by defects such as rail cracks, loose fasteners, or wheel–rail interaction issues. However, accurate defect analysis using this approach requires distinguishing between vibration frequencies generated by the rolling stock and those originating from the track structure during measurement. This separation is often challenging and can lead to inspection errors. Careful filtering techniques are required, as the vibration frequencies of the rolling stock may vary significantly depending on vehicle speed. Additionally, sensors may be affected by external vibration sources, such as other rolling stock passing on adjacent tracks, which can introduce further noise into the measurements.
VBM offers significant advantages, including real-time monitoring, reduced maintenance costs, and early fault detection, all of which help prevent issues from compromising operational safety. When installed on in-service trains traveling at speeds ranging from 30 km/h to 300 km/h, these systems can continuously assess track conditions without requiring service interruptions. Additionally, machine learning algorithms and spectral analysis techniques, such as Fast Fourier Transform (FFT) and Wavelet Transform, are employed to classify and predict faults with high accuracy. This enables predictive maintenance strategies, optimizing maintenance schedules and improving overall railway efficiency [92,93,94].
4.2.6. Thermal Imaging
Thermal cameras can be classified as optical systems; however, due to their growing importance in the past years, a specific section is dedicated in this work. Thermal imaging systems are essential for railway inspection, utilizing infrared (IR) cameras to detect temperature anomalies in rolling stock and track infrastructure, enabling early failure detection and predictive maintenance. These systems monitor bearings, axles, and brake systems, identifying overheating that may indicate lubrication failure, wear, or malfunctioning components. In railway infrastructure, thermal imaging detects rail surface cracks, moisture accumulation on track beds, and overhead line faults, preventing power losses and structural instability. Operating in the 8–14 µm LWIR range with temperature detection from –20 °C to 1500 °C, modern thermal cameras provide resolutions on the order of 640 × 480 pixels and typical sampling rates around 60 Hz, enabling reliable defect identification even at high train speeds. Integrated with AI and IoT, these systems can automate defect classification and provide real-time alerts, enhancing efficiency and reducing downtime. Typically mounted on inspection trains, drones, or stationary units, thermal imaging plays a crucial role in railway safety and operational reliability.
5. Future Trends in High-Speed Railway Inspection
In this section, the authors show their perspective about the future trends in high-speed railway inspection to keep safe and efficient railway management [95,96,97]. They focus their attention on increasing the deployment of IoT sensors to continuous monitoring of critical points along the infrastructure, integrating onboard systems to perform railway inspection during commercial operations, the application of autonomous robots, and the aspects related with data integration and analysis for predictive maintenance.
5.1. IoT Sensors
Internet of Things (IoT) sensors play a pivotal role in modernizing railway inspection and predictive maintenance by enhancing safety through real-time monitoring of infrastructure and rolling stock, thus reducing accident risks [98]. They enable predictive maintenance by continuously collecting data along the rail track to identify and address potential issues before failures occur, minimizing downtime and costs. Real-time data enables data-driven decision-making, optimizing maintenance schedules and resource allocation, thereby improving operational efficiency. Additionally, IoT sensors help reduce maintenance costs by preventing unexpected failures and allowing timely interventions.
Abnormal vibration patterns of the track and rolling stock can indicate potential issues that require maintenance [99]. Vibration sensors typically operate in the frequency range of 0.1 Hz and 10 kHz, with sensitivity levels around 100 mV/g.
Temperature sensors monitor thermal conditions of rail tracks, which is essential for preventing track buckling and ensuring the integrity of welded joints [100]. These sensors often use thermocouples or resistance temperature detectors (RTC) with a large temperature range between about −40 °C and 125 °C. Temperature variations exceeding 50 °C can lead to significant track deformations on the track and affect geometric tolerances.
Strain gauges measure the deformation of rail tracks under load [100]. They are used to monitor the stress and strain experienced by the tracks, which helps in predicting potential failures. Strain gauges have a typical gauge factor of 2.0 and can measure strains in the range of 5000 micro strains. Strain measurements can predict track failures with a lead time of up to 6 months.
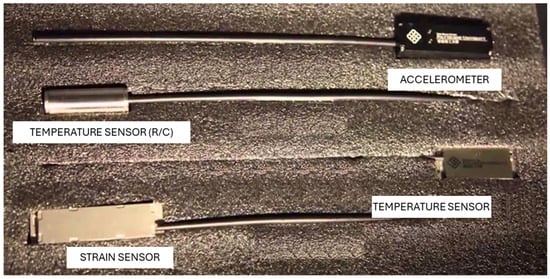
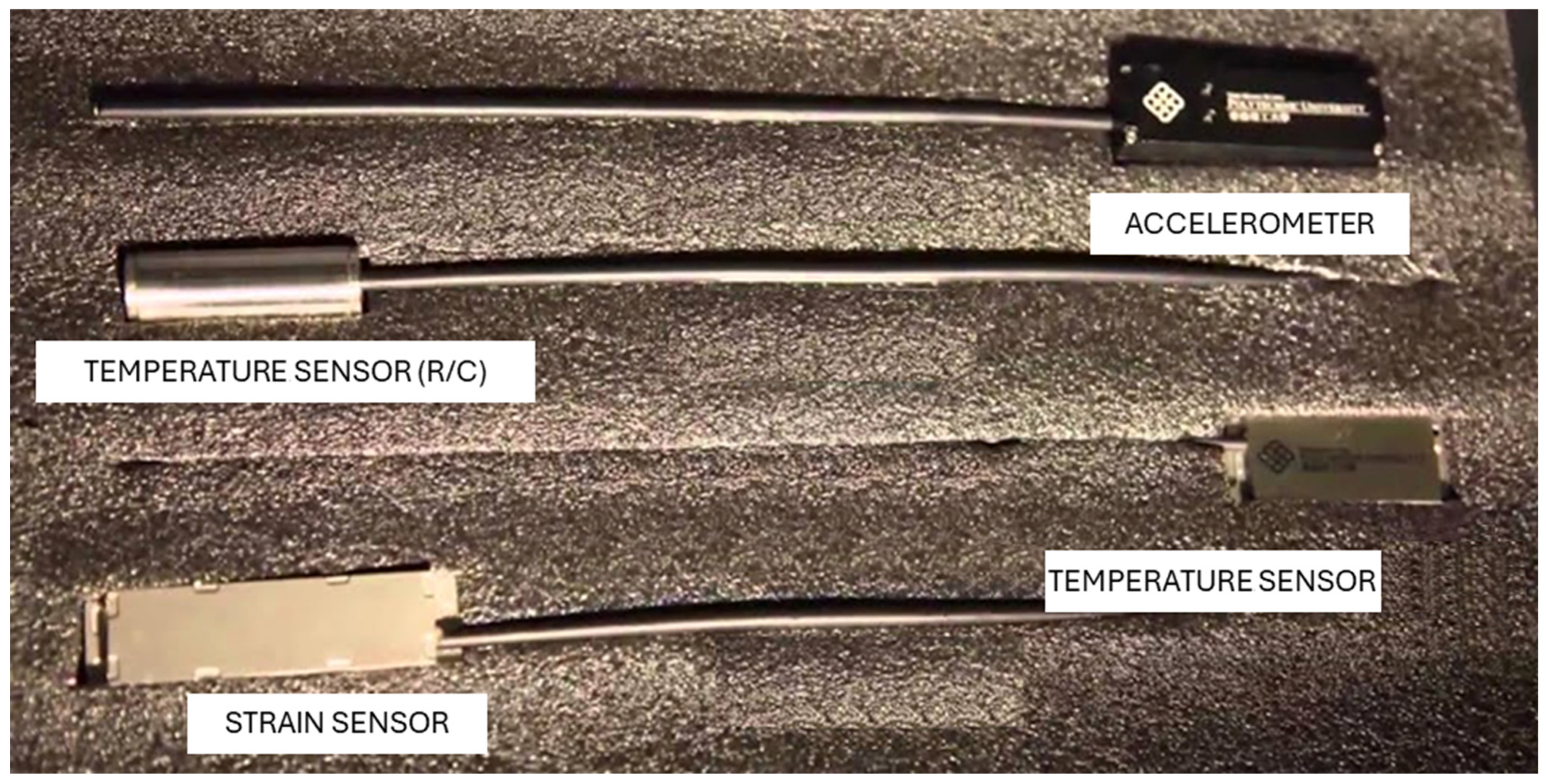
A specific type of strain gauge sensors is the Fiber Bragg Grating (FBG) with are increasingly used in predictive maintenance due to their high sensitivity, accuracy, and immunity to electromagnetic interference [101,102]. FBG sensors operate based on the principle of Bragg diffraction. A periodic variation in the refractive index is inscribed along the core of an optical fiber, creating a Bragg grating. When light is transmitted through the fiber, specific wavelengths are reflected by the gratin, while others pass through. The reflected wavelength changes in response to strain or temperature variations. FBG sensors can detect strain changes as small as 1 micro strain. Typically, their resolution is in the range of picometers, with effective frequency response of several kHz. They provide multiplexing capacity. They could be distributed along the track in large routes and provide continuous, real-time data, enabling proactive maintenance strategies. FBG sensors are durable in harsh conditions. Figure 6 shows an example of IoT sensors on railway infrastructure.
Figure 6.
Examples of IoT sensors on railway infrastructure.
5.2. Sensors Onboard Rolling Stock
The use of onboard sensors in high-speed trains to monitor the rail track is set to see significant development in the coming years. Their main advantage is their ability to provide almost continuous monitoring of the track, leveraging the operational frequencies of commercial trains. This allows the generation of large amounts of data, with high spatial and temporal redundancy, allowing for early detection of any significant infrastructure deterioration and planning maintenance operations. Precise positioning of the train during operation and measurement sensors are fundamental, for which the use of GNSS (Global Navigation Satellite Systems) with RTK (Real Time Kinematics) is essential, enabling defect positioning with centimeter accuracy. Additionally, when using systems such as digital cameras or LiDAR, it is crucial to manage the large volumes of generated data. LiDAR sensors can capture more than one million points per second. Therefore, efficient data storage during operation and high-speed wireless communication at train stations are essential for transferring data to cloud servers, enabling processing and integration with other geospatial data sources. Onboard algorithms for optimizing data acquisition and compression would also be beneficial. Sensor selection should prioritize high-speed systems capable of achieving the spatial resolution needed to detect railway pathologies, such as missing sleepers, track geometry deviations, or ballast displacement [103,104,105,106]. These sensors should complement other monitoring methods, such as IoT-based measurements mentioned in the previous section.
Additionally, it is of interest to study the performance of other sensors used in sectors as automotive industry to this purpose. Thanks to the significant development of Advanced Driver Assistance Systems (ADAS) in automobiles, robust systems like digital cameras, LiDAR, RADAR, and ultrasonic sensors could be suitable for railway measurements [107,108]. These sensors show lifespans exceeding a decade, containing cost due to the economies of scale in the automotive sector, and they are easily integrable with software tools. The applicability of these sensors to the railway sector could improve data production for inspections and generate interoperability between the data acquired from rolling stock operators and infrastructure managers for efficient maintenance. Figure 7 shows an example of sensors onboard rolling stock.
Figure 7.
Camera sensors on board rolling stock [109].
5.3. Autonomous Robots
Autonomous robots have been contributing to various infrastructure inspection tasks in recent years. These include aerial drones, terrestrial systems mounted on rails, and quadruped-type robots that can safely navigate in complex areas, providing digital information that can be integrated with software tools. In the coming years, these systems are expected to play a larger role in inspection tasks, gradually replacing human operators in hazardous jobs or situations where digital quantitative information cannot be obtained manually [110,111].
Aerial drones equipped with high-resolution cameras, and other remote sensors (e.g., LiDAR, RADAR) have shown their applicability to the railway infrastructure by providing efficient, precise, and remote monitoring capabilities. These drones can provide imagery and geometrical georeferenced information (e.g., photogrammetry, LiDAR) along the railway in a safe and efficient manner for human workers. Multirotor drones (with vertical takeoff and landing) enable access to complex areas such as bridge pillars, allowing for the assessment of their maintenance status (e.g., cracks, paint condition, rust in the case of metal structures). They are also useful for inspecting other structures, such as slopes, which pose landslide risks due to heavy rainfall that can affect railway tracks. Drones can generate digital terrain models in these scenarios and, by comparing different time periods, determine if there are structural displacements that could produce a collapse. Additionally, fixed-wing drones can be employed for long-distance measurements, such as verifying the condition of catenaries, fencing around the tracks, or unauthorized personnel access to the infrastructure. This requires collaboration with airspace authorities (e.g., AESA in Spain) to create airspace segregation above the railway corridor, allowing simultaneous operation of aircraft and trains. In this context, it is crucial to use a low mass aircraft, so that in the event of an accident (e.g., drone falling onto the train), minimal damage is caused to the train operation, like the impact of a bird [112,113,114,115,116].
Autonomous railway inspection robots are equipped with sensing systems like those on a draisine or rail track inspection vehicle, allowing them to evaluate the condition of railway infrastructure. These unmanned robots provide real-time data for immediate corrective action and predictive maintenance, enhancing safety, efficiency, and reducing maintenance costs. They can perform frequent and precise inspections even in challenging environments, thus improving the reliability of rail operations and minimizing the risk of human error, as occurs with all the robotic systems. The operation should be synchronized with commercial train operations to ensure safety [117,118,119,120,121].
Quadruped robots, often referred to as “dog robots”, are autonomous or semi-autonomous robots designed to mimic the four-legged locomotion of animals. These robots use advanced sensors, actuators, and control algorithms to navigate various environments with agility and stability. They can be equipped with remote sensing systems (e.g., cameras, LiDAR) and they traverse rough terrain, climb stairs, and access hard-to-reach areas, making them ideal for inspection and monitoring tasks in railway infrastructures, specifically in those areas apart from the rail track (e.g., train stations, fencings). Quadruped robots, which do not rely on wheels and tracks, are capable of crossing railway tracks and walking on ballast with ease. Their design allows them to adapt to uneven terrain and overcome obstacles that would be challenging for other types of robots. The information they provide can be digitalized and georeferenced in the same way other robotic systems do [122,123,124]. Figure 8 shows an example of autonomous robots that can be used for railway inspection.
Figure 8.
Autonomous robots: aerial robot (left) [125], rail robot (right) [126].
5.4. Data Analytics, Artificial Intelligence and Geospatial Technologies
The integration of data analytics and artificial intelligence (AI) in geospatial systems for railway maintenance is revolutionizing the railway industry by enhancing efficiency, safety, and cost effectiveness [127,128,129,130,131]. The first task involves ensuring the interoperability of source data and geospatial positioning. It is crucial to know the exact coordinates of the railway infrastructure, the data acquisition time, and to guarantee that the data from all sensor sources are compatible with the software systems. Once data are integrated into the computer system, data analytics enables the processing and analysis of vast amounts of information collected from multiple sensors and monitoring systems installed along railway lines and track vehicles. This data is used to predict potential failures, optimize maintenance schedules, and improve overall operational performance. AI algorithms, including machine learning and deep learning, are employed to identify patterns and anomalies in the data, allowing for early detection of issues such as track defects, equipment malfunctions, and structural weaknesses [132]. To analyze the impact of these pathologies on the general performance and safety of the infrastructure, these solutions can be combined with decision-making and analysis tools to prioritize maintenance actions, assess risk levels, and support the development of predictive maintenance strategies based on data-driven insights [133]. Geospatial technologies, such as Geographic Information Systems (GIS) provide precise location-based information that is crucial for mapping and monitoring railway infrastructure. These technologies facilitate the visualization of track conditions, environmental factors, and spatial relationships, aiding in the planning and execution of maintenance activities. Together, these advanced technologies contribute to a more proactive and predictive approach to railway maintenance, reducing downtime, enhancing safety, and ensuring the reliability of railway operations.
6. Conclusions
Railway infrastructure encompasses a multitude of elements that require thorough inspection to ensure operational safety. This infrastructure includes a diverse array of components such as rolling stock, rails, sleepers, catenary, viaducts, tunnels, and slopes, each presenting unique pathologies that must be monitored. This study specifically addresses defects affecting five fundamental elements, considered critical for correct maintenance: rail, sleepers, ballast, track geometry, and catenary.
The physical principles underlying the primary defect monitoring sensors are meticulously detailed and categorized for each element of interest. This work emphasizes the innovative use of sensors based on ultrasound, eddy currents, active and passive optical elements, accelerometers, and radar. Each sensor type is scrutinized for its advantages and limitations. For instance, ultrasound sensors offer the benefit of internal material inspection but require physical coupling via a fluid medium. Conversely, optical sensors provide non-contact surface material information but lack the capability to inspect internal structures.
The study presents various mobile platforms employed for track inspection, ranging from sophisticated laboratory trains to simpler draisines and track trolleys. Additionally, examples of commercial equipment used for inspecting various pathologies are provided, underscoring the necessity for synchronization with commercial train operations.
The authors offer a forward-looking perspective on future trends in high-speed railway inspections. They highlight the potential of IoT sensors, integrated sensors within operational trains, autonomous robots, and advanced data intelligence and geospatial technologies. The vision for the coming decades includes a significant increase in sensor integration within both infrastructure and rolling stock, aimed not only at ensuring the safety of rolling stock but also at detecting potential long-term infrastructure failures to facilitate more efficient maintenance. The authors advocate for enhanced sensorization of rolling stock, focusing on infrastructure maintenance alongside its own upkeep. This integrated approach will enable rolling stock and infrastructure to function cohesively, maintaining and protecting each other.
Furthermore, the anticipated rise in the use of autonomous robotic systems, including track robots, quadrupeds, and aerial drones, is expected to revolutionize inspections in hazardous and hard-to-reach areas, mitigating risks for human operators. Finally, the integration and parameterization of all generated data within geospatial intelligence systems will enable predictive maintenance using artificial intelligence techniques, ensuring the safety and efficiency of railway infrastructure.
Author Contributions
Conceptualization, H.G.-J. and F.V.-L.; methodology, E.A. and G.F.-C.; investigation, E.R.-O. and E.B.; writing—original draft preparation, E.A. and G.F.-C.; writing—review and editing, H.G.-J. and F.V.-L.; supervision, F.V.-L.; project administration, H.G.-J.; funding acquisition, H.G.-J. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Ministry of Science, Innovation and Universities, grant number CPP2022-009679A308, PID2021-125060OB-I00 A202 and Ciencias Mariñas-MRR C286, Xunta de Galicia, grant number FEADER 2024/052B A406 and CO-0091-2024, European Union—Horizon Europe, grant number SARIL A302.
Acknowledgments
Authors thank COPASA staff for all the support given.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Arbúes, P.; Baños, J.F.; Mayor, M. The spatial productivity of transportation infrastructure. Transp. Res. Part A Policy Pract. 2015, 75, 166–177. [Google Scholar] [CrossRef]
- Blanquart, C.; Koning, M. The local economic impacts of high-speed railways: Theories and facts. Eur. Transp. Res. Rev. 2017, 9, 12. [Google Scholar] [CrossRef]
- De Rus, G.; Inglada, V. Cost-benefit analysis of the high-speed train in Spain. Ann. Reg. Sci. 1997, 31, 175–186. [Google Scholar] [CrossRef]
- Alvarez, E.; Franch, X.; Martí-Henneberg, J. Evolution of the territorial coverage of the railway network and its influence on population growth: The case of England and Wales, 1871–1931. Hist. Methods 2013, 46, 175–191. [Google Scholar] [CrossRef]
- Gregory, I.N.; Henneberg, J.M. The railways, urbanization, and local demography in England and Wales. Soc. Sci. Hist. 2010, 34, 199–228. [Google Scholar]
- The Railway Industry: A History of Innovations. Available online: https://www.crouzet.com/ground_transportation/the-railway-industry-a-history-of-innovations/ (accessed on 16 March 2025).
- Shimoame, T. Birth of the Shinkansen: The Origin Story of the World-First Bullet Train; Springer: Berlin/Heidelberg, Germany, 2022; pp. 1–302. [Google Scholar]
- Yin, J.; Tang, T.; Yang, L.; Xun, J.; Huang, Y.; Gao, Z. Research and development of automatic train operation for railway transportation systems: A survey. Transp. Res. Part C Emerg. Technol. 2017, 85, 548–572. [Google Scholar] [CrossRef]
- Zhai, W.; Wang, K.; Cai, C. Fundamentals of vehicle-track coupled dynamics. Veh. Syst. Dyn. 2009, 47, 1349–1376. [Google Scholar] [CrossRef]
- Connolly, D.P.; Kouroussis, G.; Laghrouche, O.; Ho, C.L.; Forde, M.C. Benchmarking railway vibrations—Track, vehicle, ground and building effects. Constr. Build. Mater. 2015, 92, 64–81. [Google Scholar] [CrossRef]
- MacChi, M.; Garetti, M.; Centrone, D.; Fumagalli, L.; Piero, P.G. Maintenance management of railway infrastructures based on reliability analysis. Reliab. Eng. Syst. Saf. 2012, 104, 71–83. [Google Scholar] [CrossRef]
- Besinovic, N.; Ferrari Nassar, R.; Szymula, C. Resilience assessment of railway networks: Combining infrastructure restoration and transport management. Reliab. Eng. Syst. Saf. 2022, 224, 108538. [Google Scholar] [CrossRef]
- Shevtsov, I.Y.; Markine, V.L.; Esveld, C. Optimal design of wheel profile for railway vehicles. Wear 2005, 258, 1022–1030. [Google Scholar] [CrossRef]
- Ronanki, D.; Williamson, S.S. Evolution of power converter topologies and technical considerations of power electronic transformer-based rolling stock architectures. IEEE Trans. Transp. Electrif. 2017, 4, 211–219. [Google Scholar] [CrossRef]
- Tasiu, I.A.; Liu, Z.; Wu, S.; Yu, W.; Al-Barashi, M.; Ojo, J.O. Review of recent control strategies for the traction converters in high-speed train. IEEE Trans. Transp. Electrif. 2022, 8, 2311–2333. [Google Scholar] [CrossRef]
- He, C.; Han, L.; Fang, Y.; Wang, S.; Guo, Q.; Li, S. Research on grounding and sheath protector parameters of AC 27.5 kV single core cable for railway electrification. J. Electr. Eng. 2023, 18, 99–108. [Google Scholar]
- Agustin, D.; Wu, Q.; Ngamkhanong, C. A review on railway track buckling prediction methods. Constr. Build. Mater. 2025, 466, 140295. [Google Scholar] [CrossRef]
- Luteberget, B.; Johanse, C. Efficient verification of railway infrastructure designs against standard regulations. Form. Methods Syst. Des. 2018, 52, 1–32. [Google Scholar] [CrossRef]
- Aldao, E.; Fernández-Pardo, L.; Veiga-López, F.; González-deSantos, L.M.; González-Jorge, H. Synthetic data generation tehcniques for enhacing crack detection in railway concrete sleepers. J. Comput. Civ. Eng. 2025, 39, 04025032. [Google Scholar] [CrossRef]
- Aldao, E.; Fernández-Pardo, L.; González-deSantos, L.M.; González-Jorge, H. Comparison of deep learning and analytic image processing methods for autonomous inspection of railway bolts and clips. Constr. Build. Mater. 2023, 384, 131472. [Google Scholar] [CrossRef]
- Aldao, E.; González-Jorge, H.; González-deSantos, L.M.; Fontenla-Carrera, G.; Martínez-Sánchez, J. Validation of solid-state LiDAR measurement system for ballast geometry monitoring in ral tracks. Infrastructures 2023, 8, 63. [Google Scholar] [CrossRef]
- NEN-EN 17397-1:2020 en; Railway Applications—Rail defects—Part 1: Rail Defect Management. NEN: Delft, The Netherlands, 2020. Available online: https://www.nen.nl/nen-en-13674-1-2023-ontw-en-309475 (accessed on 16 March 2025).
- Belalia, A.; Kamla, Y.; Amara, M.; Meliani, M.H.; El Azizi, A.; Azari, Z. Experimental and numerical investigation of UIC 54 rail degradation. Eng. Fail. Anal. 2020, 111, 104163. [Google Scholar] [CrossRef]
- Wang, J.; Jing, L.; Zhou, X.; Liu, K. Influence of material properties on the high-speed wheel-rail rolling contact behaviour. Veh. Syst. Dyn. 2024, 62, 1686–1712. [Google Scholar] [CrossRef]
- Yu, X.; Muñoz, S.; Urda, P.; Aceituno, J.F.; Gómez, M.R.; Escalona, J.L. Experimental study of the use of a transfer function to find rail corrugation from axle-box accelerations. Meas. J. Int. Meas. Confed. 2025, 249, 117058. [Google Scholar] [CrossRef]
- Guan, Q.; Wen, Z.; Liu, B.; Wang, H.; Liang, S. A new perspective on rail corrugation and its practical implications. Wear 2025, 564–565, 205743. [Google Scholar] [CrossRef]
- Rail Diagnosis. Available online: https://rail-vision.com/track/diagnostics/rail/ (accessed on 17 March 2025).
- Ferdous, W.; Manalo, A. Failures of mainline railway sleepers and suggested remedies—Review of current practice. Eng. Fail. Anal. 2014, 44, 17–35. [Google Scholar] [CrossRef]
- Kaewunruen, S.; Remennikov, A.M. Progressice failure of prestressed concrete sleepers under multiple high-intensity impact loads. Eng. Struct. 2009, 31, 2460–2473. [Google Scholar] [CrossRef]
- Kaewunruen, S.; Remennikov, A.M. Dynamic crack propagations in prestressed concrete sleepers in railway track systems subjected to severe impact loads. J. Struct. Eng. 2010, 136, 749–754. [Google Scholar] [CrossRef]
- Zi, G.; Moon, D.Y.; Lee, S.J.; Jang, S.Y.; Yang, S.C.; Kim, S.S. Investigation of a concrete railway sleeper failed by ice expansion. Eng. Fail. Anal. 2012, 26, 151–163. [Google Scholar] [CrossRef]
- Indraratna, B.; Ionescu, D.; Christie, H.D. Shear behavior of railway ballast based on large-scale triaxial tests. J. Geotech. Geoenviron. Eng. 1998, 124, 439–449. [Google Scholar] [CrossRef]
- Sun, Q.D.; Indraratna, B.; Nimbalkar, S. Deformation and degradation mechanisms of railway ballast under high frequency cyclic loading. J. Geotech. Geoenviron. Eng. 2016, 142, 04015056. [Google Scholar] [CrossRef]
- Luo, J.; Ding, K.; Huang, H.; Quambia, I.I.I.; Tutumluer, E.; Hart, J.M.; Thompson, H.; Sussmann, T. Towards automated field ballast condition evaluation: Field validation of the ballast scanning vehicle capabilities. Transp. Geotech. 2024, 48, 101311. [Google Scholar] [CrossRef]
- Chi, Y.; Xiao, H.; Wnag, Y.; Zhang, Z.; Nadakatti, M.N. Experimental study and numerical simulation of the impact of under-sleeper pads on the dynamic and static mechanical behavior of heavy-haul railway ballast track. Railw. Eng. Sci. 2024, 32, 383–400. [Google Scholar] [CrossRef]
- Dahlberg, T. Railway track stiffness variations—Consequences and countermeasures. Int. J. Civ. Eng. 2010, 8, 1–12. [Google Scholar]
- CENprEN 13450-1; Aggregates for Railway Ballast—Part 1: Characteristics. CEN: Bruxelles, Belgium, 2021.
- Guo, Y.; Zhai, W. Long-term prediction of track geometry degradation in high-speed vehicle-ballastless track system due to differential subgrade settlement. Soil Dyn. Earthq. Eng. 2018, 113, 1–11. [Google Scholar] [CrossRef]
- Bocz, P.; Liegner, N.; Vinki, A.; Fisher, S. Investigation of the causes of railway track gauge narrowing. Vehicles 2023, 5, 949–977. [Google Scholar] [CrossRef]
- Ramos, J.A.V.S.; Lima, A.O.; Dersch, M.S.; Edwards, J.R. Stochastic investigation of the relationship between track geometry and ballast degradation rates. Transp. Geotech. 2025, 51, 101533. [Google Scholar] [CrossRef]
- Track Geometry. Available online: https://rail-vision.com/track/diagnostics/track-geometry/ (accessed on 17 March 2025).
- NEN-EN 13848-5:2017 en; Railway Applications—Track—Track Geometry Quality—Part 5: Geometric Quality Levels—Plain Line, Switches and Crossings. NEN: Delft, The Netherlands, 2017. Available online: https://standards.iteh.ai/catalog/standards/cen/6b03fdaf-2d25-4f0f-96d7-39039fbeb9be/en-13848-5-2017 (accessed on 16 March 2025).
- Zhang, H.; Zhu, G.; Li, Z.; Huang, G.; Zeng, R. Study on the catenary icing characteristics of high-speed railways under different environments. Lect. Notes Electr. Eng. 2025, 1309, 473–481. [Google Scholar]
- Anastasio, D.; Marchesiello, S.; Garibaldi, L. A study on the optimal spatial damping distribution in railway pantograph-catenary interaction. Veh. Syst. Dyn. 2024, 62, 888–905. [Google Scholar] [CrossRef]
- Song, Y.; Wang, H.; Liu, Z. An investigation on the current collection quality of railway pantograph-catenary systems with contact wire wear degradations. IEEE Trans. Instrum. Meas. 2021, 70, 9427193. [Google Scholar] [CrossRef]
- Song, Y.; Wang, Z.; Liu, Z.; Wang, R. A spatial coupling model to study dynamic performance of pantograph-catenary with vehicle-track excitation. Mech. Syst. Signal Process. 2021, 151, 107336. [Google Scholar] [CrossRef]
- Kilsby, P.; Remenyte-Prescott, R.; Andrews, J. A modelling approach for railway overhead line equipment asset management. Reliab. Eng. Syst. Saf. 2017, 168, 326–337. [Google Scholar] [CrossRef]
- EN 50119:2009; Railway Applications—Fixed Installations—Electric Traction Overhead Contact Lines. CENELEC: Brussels, Belgium, 2009. Available online: https://standards.iteh.ai/catalog/standards/clc/9a26713f-a93e-4800-bdad-89140f2bcc11/en-50119-2009 (accessed on 16 March 2025).
- Mariani, S.; Nguyen, T.; Zhu, X.; di Scalea, F.L. Field test performance of non-contact ultrasonic rail inspection system. J. Transp. Eng. Part A Syst. 2017, 143, 04017007. [Google Scholar] [CrossRef]
- Papaelias, M.P.; Roberts, C.; Davis, C.L. A review on non-destructive evaluation of rails: State of the art and future development. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2008, 224, 367–384. [Google Scholar] [CrossRef]
- Zhou, Q. A detection system for rail defects based on machine vision. J. Phys. Conf. Ser. 2021, 1748, 22012. [Google Scholar] [CrossRef]
- Phaphuangwittayakul, A.; Harnpornchai, N.; Ying, F.; Zhang, J. Rail track-DaViT: A vision transformer-based approach for automated railway track defect detection. J. Imaging 2024, 10, 192. [Google Scholar] [CrossRef]
- Al-Nuaimy, W.; Eriksen, A.; Gasgoyne, J. Train-mounted GPR for high-speed rail trackbed inspection. In Proceedings of the Tenth International Conference on Grounds Penetrating Radar, Delft, The Netherlands, 21–24 June 2004; Volume 2, pp. 631–634. [Google Scholar]
- Wu, Q.; An, X.; Li, L. Concrete sleeper crack detection based on image saliency. Eng. Res. Express 2025, 7, 015103. [Google Scholar] [CrossRef]
- Mario, F.; Distante, A.; Mazzeo, P.L.; Stella, E. A real-time visual inspection system for railway maintenance: Automatic hexagonal-headed bolts detection. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 418–428. [Google Scholar] [CrossRef]
- Tatarinov, A.; Rumjancevs, A.; Mironovs, V. Assessment of cracks in pre-stressed concrete railway sleepers by ultrasonic testing. Procedia Comput. Sci. 2019, 149, 324–330. [Google Scholar] [CrossRef]
- Yüksel, K.; Kinet, D.; Moeyaert, V.; Moeyaert, V.; Kouroussis, G.; Caucheteur, C. Railway monitoring system using optical fiber grating accelerometers. Smart Mater. Struct. 2018, 27, 105033. [Google Scholar] [CrossRef]
- Zagyapan, M.; Fairfield, C.A. Continuous surface wave and impact methods of measuring the stiffness and density of railway ballast. NDT E Int. 2002, 35, 75–81. [Google Scholar] [CrossRef]
- Benedetto, A.; Tosti, F.; Bianchini Ciampoli, L.; Calvi, A.; Brancadoro, M.G.; Alani, A.M. Railway ballast condition assessment using ground penetrating radar—An experimental, numerical simulation and modelling development. Constr. Build. Mater. 2017, 140, 508–520. [Google Scholar] [CrossRef]
- De Bold, R.; Connolly, D.P.; Patience, S.; Lim, M.; Forde, M.C. Using impulse response testing to examine ballast fouling of a railway trackbed. Constr. Build. Mater. 2021, 274, 121888. [Google Scholar] [CrossRef]
- Pereira, P.; Ribeiro, F.; Motta, R.; Neto, A.G.; Bernucci, L.; Junior, E.F.; Moura, E.; Silva, R.; Oliveira, L.; Melo, I. Perspectives of assessing the geometric condition of railway tracks using a device for measuring the topographic profile. Meas. J. Int. Meas. Confed. 2025, 249, 117020. [Google Scholar] [CrossRef]
- Weston, P.; Roberts, C.; Yeo, G.; Stewart, E. Perspectives on railway track geometry condition monitoring from in-service railway vehicles. Veh. Syst. Dyn. 2015, 53, 1063–1091. [Google Scholar] [CrossRef]
- Sharma, S.; Cui, Y.; He, Q.; Mohammadi, R.; Li, Z. Data-driven optimization of railway maintenance for track geometry. Transp. Res. Part C Emerg. Technol. 2018, 90, 34–58. [Google Scholar] [CrossRef]
- Li, C.; He, Q.; Wang, P. Estimation of railway track longitudinal irregularity using vehicle response with information compression and Bayesian deep learning. Comput. Aided Civ. Infrastruct. Eng. 2022, 37, 1260–1276. [Google Scholar] [CrossRef]
- Kaerunruen, S.; Osma, M.H.B.; Rungskunroch, P. The total track inspection. Front. Built Environ. 2019, 4, 84. [Google Scholar]
- Sánchez-Rodríguez, A.; Soilán, M.; Cabaleiro, M.; Arias, P. Automated inspection of railway tunnels’ power line using LiDAR point clouds. Remote Sens. 2019, 11, 2567. [Google Scholar] [CrossRef]
- Huang, S.; Chen, W.; Sun, B.; Tao, T.; Yang, L. Arc detection and recognition in the pantograph-catenary system based on multi-information fusion. Transp. Res. Rec. 2020, 2674, 229–240. [Google Scholar] [CrossRef]
- Pastucha, E. Catenary system detection, localization and classification using mobile scanning data. Remote Sens. 2016, 8, 801. [Google Scholar] [CrossRef]
- Wei, X.; Jiang, S.; Li, Y.; Li, C.; Jia, L.; Li, Y. Defect detection of pantograph slide based on deep learning and image processing technology. IEEE Trans. Intell. Transp. Syst. 2020, 21, 947–958. [Google Scholar] [CrossRef]
- Santiso, E.; Jiménez, J.A.; Mazo, M.; Losada, C.; Rodríguez, F.J. Annoucement signals and automatic braking using virtual balises in railway transport systems. Sensors 2022, 22, 1943. [Google Scholar] [CrossRef]
- Subsystems and Constituents of the ERTMS. Available online: https://transport.ec.europa.eu/transport-modes/rail/ertms/what-ertms-and-how-does-it-work/subsystems-and-constituents-ertms_en (accessed on 18 March 2025).
- Global System for Mobile Communications—Railway. Available online: https://www.era.europa.eu/domains/infrastructure/european-rail-traffic-management-system-ertms/radio-communication_en (accessed on 18 March 2025).
- ADIF Seneca. Available online: https://es.wikipedia.org/wiki/Serie_330_de_ADIF (accessed on 18 March 2025).
- Doctor Yellow High-Speed Diagnostic Train. Available online: https://en.wikipedia.org/wiki/Doctor_Yellow (accessed on 18 March 2025).
- SNFC TFG Iris 320. Available online: https://en.wikipedia.org/wiki/SNCF_TGV_Iris_320 (accessed on 18 March 2025).
- Diagnostyka Bezpieczeństwa Torów i Trakcji z Prędkością 120/km Godz. Available online: https://inzynieria.com/drogi/wiadomosci/63483,diagnostyka-bezpieczenstwa-torow-i-trakcji-z-predkoscia-120km-godz (accessed on 22 May 2025).
- Deutzer Gallery. Available online: https://www.deutzer.de/referenzgalerie/?lang=en (accessed on 22 May 2025).
- Plasser DIC 62N. Available online: https://www.flickr.com/photos/27556454@N07/6226392496/ (accessed on 19 June 2025).
- Plasser DIC 40. Available online: https://www.flickr.com/photos/nmorao/2620198749 (accessed on 19 June 2025).
- DRPTCT-Dual Corrugation. Available online: https://www.donfabsandconsillia.com/railway/Track-Geometry/drptct-dual-corrugation (accessed on 19 March 2025).
- Amberg GRP1000. Available online: https://ambergtechnologies.com/solutions-services (accessed on 19 March 2025).
- ScanMASTER UT-M18. Available online: https://scanmaster-irt.com/products/railways/metro-rail-inspection/ (accessed on 19 March 2025).
- ENSCO Ultrasonic Rail Flaw System. Available online: https://www.ensco.com/rail/ultrasonic-rail-flaw-system-urfs (accessed on 19 March 2025).
- Pandrol SonicVizio-WS-S. Available online: https://www.pandrol.com/product/sonicvizio-ws-s/ (accessed on 19 March 2025).
- Rail track Analyzer. Available online: https://www.railtrackanalyzer.com/ (accessed on 19 March 2025).
- IDS Georadar. Available online: https://idsgeoradar.com/products/ground-penetrating-radar/srs-saferailsystem (accessed on 19 March 2025).
- OKOndt Eddy Current Testing. Available online: https://www.okondt.com/applications/rails-and-welds-testing/eddy-current-testing-of-rails (accessed on 19 March 2025).
- EDC Eddy Current Machine. Available online: https://www.ndt.com.ua/en/products/et/flaw-detectors/edc-rail-5065-rail-testing-eddy-current-machine (accessed on 19 March 2025).
- Trimble Gedo GX50 Scanner. Available online: https://gedo.trimble.com/en/products-and-solutions/trimble-gedo-gx50 (accessed on 19 March 2025).
- Trimble MX9 Mobile Mapping. Available online: https://gedo.trimble.com/en/blog/industry-first-trimble-mx9-mobile-mapping-system-certified-deutsche-bahn (accessed on 19 March 2025).
- TVEMA SOKOL. Available online: http://tvema.com/638 (accessed on 19 March 2025).
- SKF IMx-Rail—Mobile System. Available online: https://www.skf.com/es/industries/railways/solutions/multilog-on-line-system-imx-rail (accessed on 19 March 2025).
- Defrako Consortium Acelerometer. Available online: https://www.southampton.ac.uk/engineering/research/projects/railway_damping_technologies.page (accessed on 19 March 2025).
- Thermal Imaging in Catenary Inspection. Available online: https://rail-vision.com/infrastructure/overhead-lines/catenary-measurements/ (accessed on 19 March 2025).
- Helmi, W.; Bridgelall, R.; Askarzadeh, T. Remote sensing and machine learning for safer railways: A review. Appl. Sci. 2024, 14, 3573. [Google Scholar] [CrossRef]
- Wang, J.; Li, Q.; Zhang, J.; Gan, J. Visual inspection of rail defects: Background, methodologies, and trends. J. Image Graph. 2021, 26, 287–296. [Google Scholar] [CrossRef]
- Tian, Y.; Zhang, J.; Lyu, Y.; Zhang, J. Comprehensive review of noncontact sensing technologies for bridge condition monitoring and assessment. Intell. Transp. Infrastruct. 2024, 3, liae012. [Google Scholar] [CrossRef]
- Kljaic, Z.; Pavkovic, D.; Cipek, M.; Trstenjak, M.; Mlinaric, T.J.; Niksic, M. An overview of current challenges and emerging technologies to facilitate increases energy efficiency, safety, and sustainability of railway transport. Future Internet 2023, 15, 347. [Google Scholar] [CrossRef]
- Kouroussis, G.; Connolly, D.P.; Verlinden, O. Railway-induced vibrations—A review of vehicle effects. Int. J. Rail Transp. 2014, 2, 69–110. [Google Scholar] [CrossRef]
- Luo, Y.; Li, L.; Yin, H. A dynamic analysis of a continuous welded rail track under a longitudinal stress caused by temperature changes. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2010, 224, 91–101. [Google Scholar] [CrossRef]
- Edwards, J.R.; Gao, Z.; Wolf, H.E.; Dersch, M.S.; Qian, Y. Quantification of concrete railway sleeper bending moments using surface strain gauges. Meas. J. Int. Meas. Confed. 2017, 111, 197–207. [Google Scholar] [CrossRef]
- Du, C.; Dutta, S.; Kurup, P.; Yu, T.; Wang, X. A review of railway infrastructure monitoring using fiber optic sensors. Sens. Actuators A Phys. 2020, 303, 111728. [Google Scholar] [CrossRef]
- Gao, H.; Huang, Y.; Li, H.; Zhang, Q. Multi-sensor fusion perception system in train. In Proceedings of the 2021 IEEE 10th Data Driven Control and Learning Systems Conference (DDCLS), Suzhou, China, 14–16 May 2021; pp. 1171–1176. [Google Scholar]
- Zhang, X.; Fan, T.; Mao, Q.; Zhang, Y. Vehicle-mounted rail patrol inspection equipment using a combination of line-scan cameras and lasers. J. Surv. Eng. 2025, 151, 06024003. [Google Scholar] [CrossRef]
- Zeng, Y.; Nunez, A.; Dollevoet, R.; Zoeteman, A.; Li, Z. A train-borne laser vibrometer solution based on multisignal fusion for self-contained railway track monitoring. IEEE Trans. Ind. Inform. 2025, 21, 1585–1594. [Google Scholar] [CrossRef]
- Ma, B.; Yang, M. A rail wear measurement system based on line structured light and binocular camera structure. Int. Conf. Intell. Control Meas. Signal Process. 2024, 206645, 22–25. [Google Scholar]
- Gulino, M.S.; Vichi, G.; Cecchetto, F.; Di Lillo, L.; Vangi, D. A combined comfort and safety-based approach to assess the performance of advanced driver assistance functions. Eur. Transp. Res. Rev. 2025, 17, 6. [Google Scholar] [CrossRef]
- Kukkala, V.K.; Tunnell, J.; Pasricha, S.; Bradley, T. Advanced driver-assistance systems: A path toward autonomous vehicles. IEEE Consum. Electron. Mag. 2018, 7, 18–25. [Google Scholar] [CrossRef]
- Onboard Scanning Camera. Available online: https://www.flickr.com/photos/jamesbondsv/3143536786/ (accessed on 20 June 2025).
- Rubio, F.; Valero, F.; Llopis-Albert, C. A review of mobile robots: Concepts, methods, theoretical framework, and applications. Int. J. Adv. Robot. Syst. 2019, 16, 1–22. [Google Scholar] [CrossRef]
- Soori, M.; Arezzo, B.; Dastres, R. Artificial intelligence, machine learning and deep learning in advanced robotics, a review. Cogn. Robot. 2023, 3, 54–70. [Google Scholar] [CrossRef]
- Askarzadeh, T.; Bridfelall, R.; Tolliver, D.D. Systematic literature review of drone utility in railway condition monitoring. J. Transp. Eng. Part A Syst. 2023, 149, 04023041. [Google Scholar] [CrossRef]
- Rahman, M.A.; Mammeri, A. Vegetation detection in UAV imagery for railway monitoring. Int. Conf. Veh. Technol. Intell. Transp. Syst. 2021, 1, 457–464. [Google Scholar]
- Aela, P.; Chi, H.L.; Fares, A.; Zayed, T.; Kim, M. UAV-based studies in railway infrastructure monitoring. Autom. Constr. 2024, 167, 105714. [Google Scholar] [CrossRef]
- Arroyo-Mora, J.P.; Kalacska, M.; Roghani, A.; Lucanus, O. Assessment of UAS photogrammetry and plant imagery for monitoring water levels around railway tracks. Drones 2023, 7, 553. [Google Scholar] [CrossRef]
- Vong, C.H.; Ravitharan, R.; Reichl, P.; Chevin, J.; Chung, H. Small scale unmanned aerial system (UAS) for railway culvert and tunnel inspection. In Proceedings of the 2017 First International Conference on Rail Transportation, Chengdu, China, 10–12 July 2017; pp. 1024–1032. [Google Scholar]
- Jing, G.; Qin, X.; Wang, H.; Deng, C. Developments, challenges, and perspectives of railway inspection robots. Autom. Constr. 2022, 138, 104242. [Google Scholar] [CrossRef]
- Rahman, M.; Liu, H.; Cardenas, I.D.; Starr, A.; Hall, A.; Anderson, R. Towards an autonomous RIRS: Design, structure investigation and framework. In Proceedings of the 2021 7th International Conference on Mechatronics and Robotics Engineering (ICMRE), Budapest, Hungary, 3–5 February 2021; pp. 164–168. [Google Scholar]
- Minea, M.; Dumitrescu, C.M.; Dima, M. Robotic railway multi-sensing and profiling unit based on artificial intelligence and data fusion. Sensors 2021, 21, 6876. [Google Scholar] [CrossRef]
- Chittal, K.; Nandhini, M.; Krithika, V.; Siyo, I.N.; Adithyan, J.; Gowtham, M. Autonomous rail inspection. In Proceedings of the 2017 IEEE International Conference on Power, Control, Signals and Instrumentation Engineering (ICPCSI), Chennai, India, 21–22 September 2017; Volume 137381, pp. 2573–2577. [Google Scholar]
- Garlapati, S.M.; Anupama, C.S.S.; Shaik, S.; Balaga, M.D.D.; Chennamsetii, S. Automatic robot for rail crack detection system. In Proceedings of the 2017 IEEE Region 10 Humanitarian Technology Conference (R10-HTC), Dhaka, Bangladesh, 21–23 December 2017; Volume 205731, pp. 1–5. [Google Scholar]
- Peng, X.B.; Coumans, E.; Zhang, T.; Lee, T.W.E.; Tan, J.; Levine, S. Learning agile robotic locomotion skills by imitating animals. Robot. Sci. Syst. 2020, 275129, 1–14. [Google Scholar]
- Hutter, M.; Gehring, C.; Lauber, A.; Gunther, F.; Bellicoso, C.D.; Tsounis, V.; Fankhauser, P.; Diethelm, R.; Bachmann, S.; Bloesch, M.; et al. ANYmal—Toward legged robots for harsh environments. Adv. Robot. 2017, 31, 918–931. [Google Scholar] [CrossRef]
- Li, X.; Chen, F.; Wang, Y.; Ma, B.; Tnag, Q. Obstacle avoidance for guided quadruped robots in complex environments. Lect. Notes Comput. Sci. 2025, 15209, 101–113. [Google Scholar]
- DRONI. Aiviewgroup si Aggiudica la Gara di RFI per i Servizi di Ispezione con SAPR dei Ponti Ferroviari e i Rilievi Strutturali. Available online: https://www.quadricottero.com/2016/05/droni-aiviewgroup-si-aggiudica-la-gara.html (accessed on 20 June 2025).
- Stadler Rail—Two-Way Shunting Robot. Available online: https://www.flickr.com/photos/kecko/49701893496 (accessed on 20 June 2025).
- Titu, A.M.; Bulgariu, C.L. The implication of artificial intelligence in the safety and security (Cyber Security) of railway transport. AIP Conf. Proc. Int. Conf. Green Eng. Technol. 2024, 2991, 050061. [Google Scholar]
- Tang, R.; De Donato, L.; Besinovic, N.; Flammini, F.; Goverde, R.M.P.; Lin, Z.; Liu, R.; Tiang, T.; Vittorini, V.; Wang, Z. A literature review of Artificial Intelligence applications in railway systems. Transp. Res. Part C Emerg. Technol. 2022, 140, 103679. [Google Scholar] [CrossRef]
- Vieira, J.; de Almeida, N.M.; Martins, J.P.; Patricio, H.; Morgado, J.G. Analysing the value of digital twinning opportunities in infrastructure asset management. Infrastructures 2024, 9, 158. [Google Scholar] [CrossRef]
- Granzner, M.; Strauss, A.; Reiterer, M.; Cao, M.; Novak, D. Data-driven condition assessment and life cycle analysis methods for dynamically and fatigue-loaded railway infrastructure components. Infrastructures 2023, 8, 162. [Google Scholar] [CrossRef]
- Futai, M.M.; Bittencourt, T.N.; Santos, R.R.; Araujo, C.R.R.; Ribeiro, D.M.; Rocha, A.R.; Ellis, R. Utilization of digital twins for bridge inspection, monitoring and maintenance. Lect. Notes Civ. Eng. 2022, 200, 166–173. [Google Scholar]
- Pappaterra, M.J.; Flammini, F.; Vittorini, V.; Besinovic, N. A systematic review of artificial intelligence public datasets for railway applications. Infrastructures 2021, 6, 136. [Google Scholar] [CrossRef]
- Aldao, E.; Ríos-Otero, E.; Veiga-López, F.; González-Jorge, H.; Balvís, E. Railway Inspection and Information Model (RIIM): An Intelligent Decision-Making Tool for Enhanced Infrastructure Management. In 20th International Probabilistic Workshop. IPW 2024. Lecture Notes in Civil Engineering; Matos, J.C., Lourenço, P.B., Oliveira, D.V., Branco, J., Proske, D., Silva, R.A., Sousa, H.S., Eds.; Springer: Cham, Switzerland, 2024; Volume 494. [Google Scholar] [CrossRef]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).