

A User-Centered Theoretical Model for Future Urban Transit Systems



Abstract
1. Introduction
1.1. The Study’s Objectives
1.2. Outline of the Paper
- Section 2—Methodology: In this section, we will present the construction of the objective function of the optimization model, constraints, and mathematics.
- Section 3—Experiment Setup: Experiment setup, performance measures, sources of data, and various simulation parameters will be described in this section.
- Section 4—Results: This section will address performance measures and scenario analysis, noting the result of simulation tests.
- Section 5—Discussion: We present here the findings, emphasizing the main conclusions and their implications for urban transport.
- Section 6—Conclusions: In this final section of the article, we summarize the principal findings of the study and offer suggestions for future research.
2. Methodology
2.1. Optimization Model Description
2.2. Scenario Integration
- Peak Hours: Travel speeds are reduced by 30% to account for congestion, and demand increases by a factor of 2.5.
- Off-Peak Hours: Travel speeds remain at baseline levels while demand decreases by 50%.
- Adverse Weather: Travel speeds are reduced by 50%, and emission factors increase by 30% due to less efficient vehicle operation.
- Accidents: Travel speeds are reduced by 70% on affected routes, and vehicle capacities are reduced by 30% to reflect road closures.
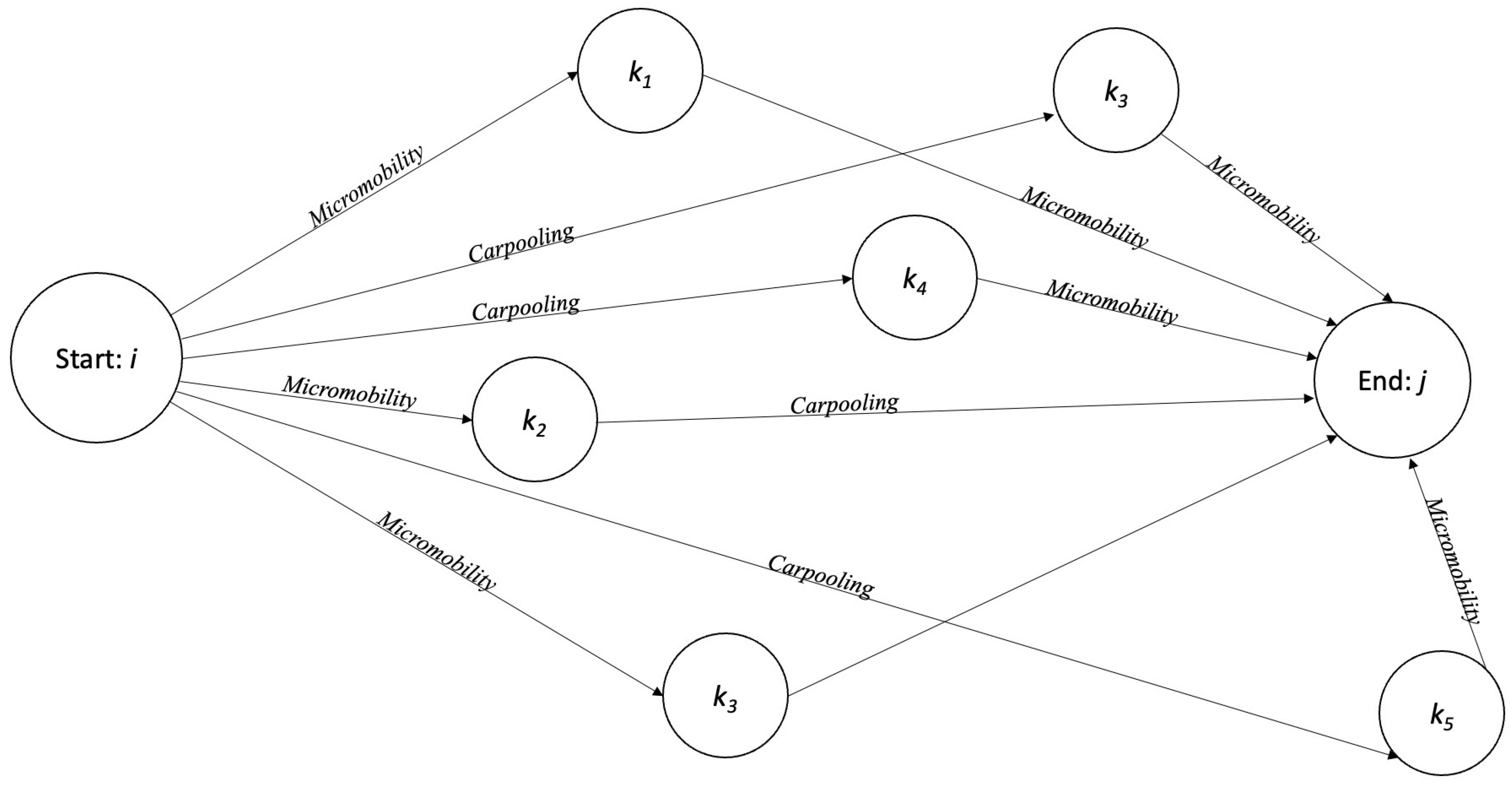
2.3. Network Topology
- Node Arrangement: The nodes are uniformly spaced, typically 1 to 2 km apart, reflecting urban density.
- Link Arrangements: Links are bidirectional to allow flexible routing. Each link is characterized by distance, travel time, and mode-specific attributes (e.g., designated for vehicle-only or micro-mobility-only use).
- Scalability: The model is scalable to networks ranging from small neighborhoods (approximately 10 nodes) to large metropolitan areas (more than 100 nodes). Computational efficiency is achieved through sparse matrix representations and heuristic-based optimization techniques.
2.4. Mathematical Notation
- Variables
- –
- : Binary variable equal to 1 if a vehicle is used for travel from node i to j, and 0 otherwise.
- –
- : Binary variable equal to 1 if a micro-mobility option is used for travel from node i to j, and 0 otherwise.
- –
- : Binary variable equal to 1 if a multi-leg trip is used between nodes i and j (used in more complex routing scenarios), and 0 otherwise.
- –
- : Binary variable equal to 1 if vehicle v is in use, and 0 otherwise.
- Parameters
- –
- Travel Time
- ∗
- : Travel time for a vehicle trip between nodes i and j.
- ∗
- : Travel time for a micro-mobility trip between nodes i and j.
- –
- Cost
- ∗
- : Cost associated with operating vehicle v.
- ∗
- : Cost associated with a micro-mobility trip between nodes i and j.
- –
- Emissions
- ∗
- : Emissions generated by vehicle v.
- ∗
- : Emissions generated by a micro-mobility trip between nodes i and j.
- –
- User Satisfaction
- ∗
- : Satisfaction score for a vehicle trip between nodes i and j.
- ∗
- : Satisfaction score for a micro-mobility trip between nodes i and j.
- –
- Capacity and Demand
- ∗
- : Passenger demand between nodes i and j.
- ∗
- : Vehicle capacity v.
- –
- System Limits
- ∗
- : Maximum allowable travel time for vehicle trips.
- ∗
- : Maximum allowable travel time for micro-mobility trips.
- ∗
- : Maximum cumulative emissions allowed.
2.5. Objective Functions
2.5.1. Minimization of Travel Time
2.5.2. Minimization of Costs
2.5.3. Minimization of Emissions
2.5.4. Maximization of User Satisfaction
2.6. Constraints
2.6.1. Vehicle Capacity
2.6.2. Travel Time Limits
2.6.3. Emissions Cap
2.6.4. Assignment Constraint
2.7. Solution Method
- Initialization: Definition of decision variables, the composite objective function, and all constraints.
- Optimization: The problem is solved using the PuLP library, which employs the COIN-OR Branch-and-Cut (CBC) solver for linear programming.
- Post-Processing: The optimal solution is extracted and analyzed to determine the assignments of the route, travel times, costs, and emissions.
- Sensitivity Analysis: Systematic variation of weight factors (–) to evaluate their impact on route assignments and objective trade-offs.
2.8. Model Visualization
2.9. Model Innovations
3. Data and Experimental Setup
3.1. Data Description
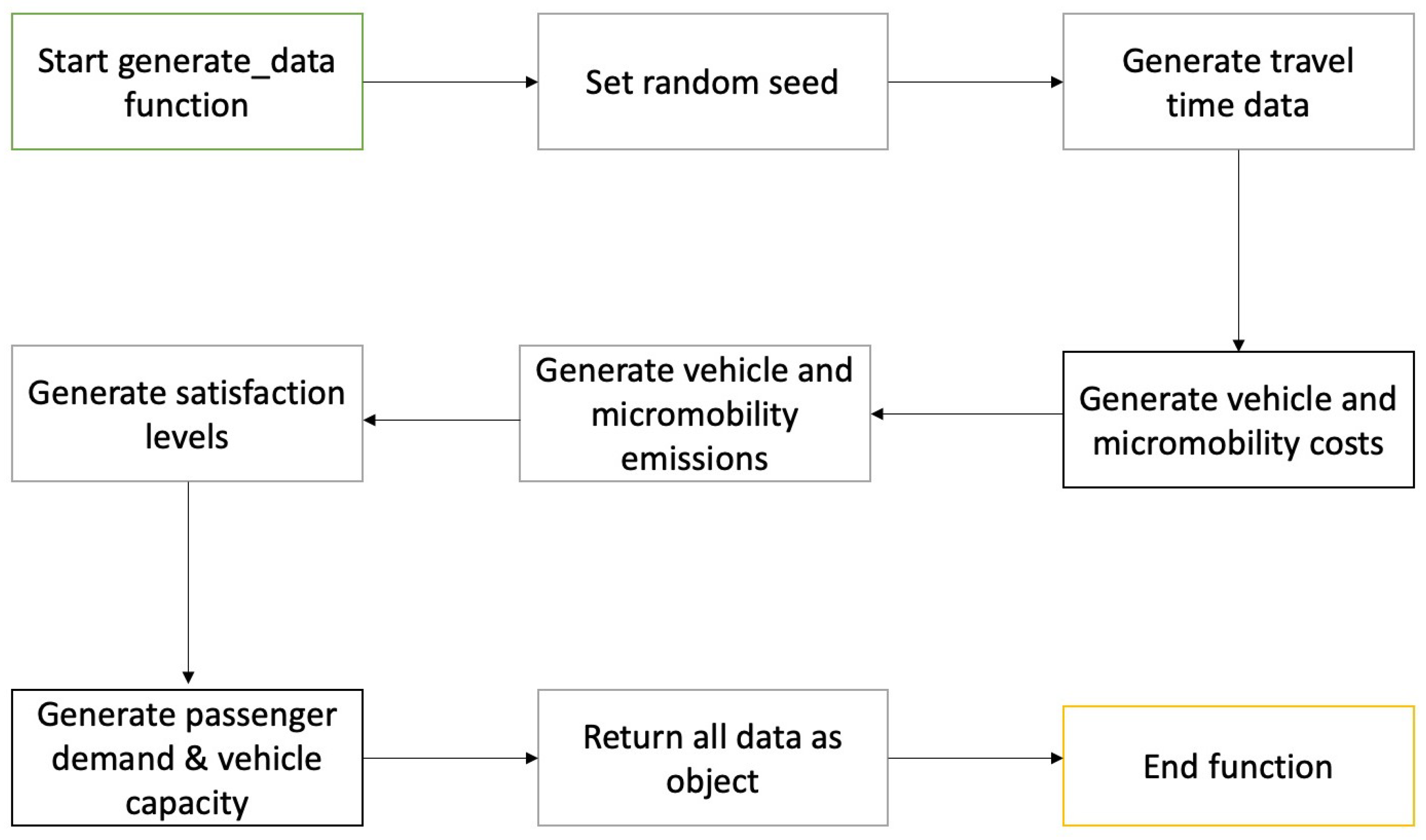
3.2. Synthetic Data-Generation Framework
3.2.1. Travel Times
3.2.2. Emissions
3.2.3. User Satisfaction
3.3. Robustness and Scenario Validation
3.3.1. Sensitivity Analysis
3.3.2. Scenario Validation
3.4. Experimental Setup
3.4.1. Experimental Scenarios
3.4.2. Mapping Data to Model Inputs
4. Results
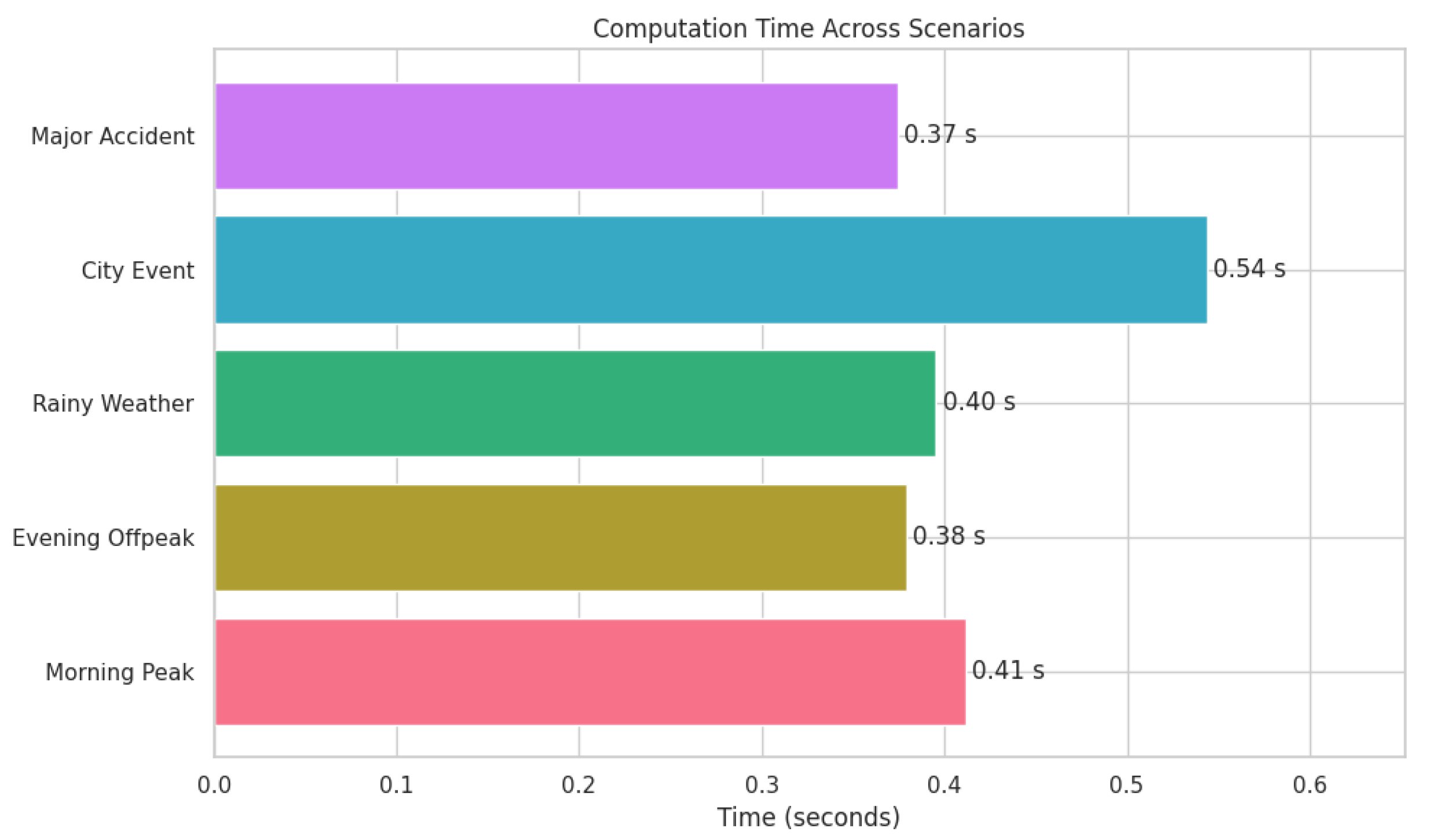
4.1. Computation Time Analysis
- The Major Accident scenario recorded a computation time of 0.37 s.
- The Evening Off-Peak and Morning Peak scenarios required 0.38 s and 0.41 s, respectively.
- The City Event and Rainy Weather scenarios were solved in 0.54 s and 0.40 s, respectively.
4.2. Trip Distribution Across Scenarios
- The Morning Peak scenario exhibits the highest number of Vehicle, micro-mobility, and multi-leg trips, indicating increased travel demand and complex routing during peak hours.
- Conversely, the Major Accident scenario shows the lowest number of trips across all categories, likely due to significant route disruptions and capacity constraints.
- The Rainy Weather and City Event scenarios display moderate trip counts, reflecting the combined effects of adverse conditions and special event-induced changes in traffic patterns.
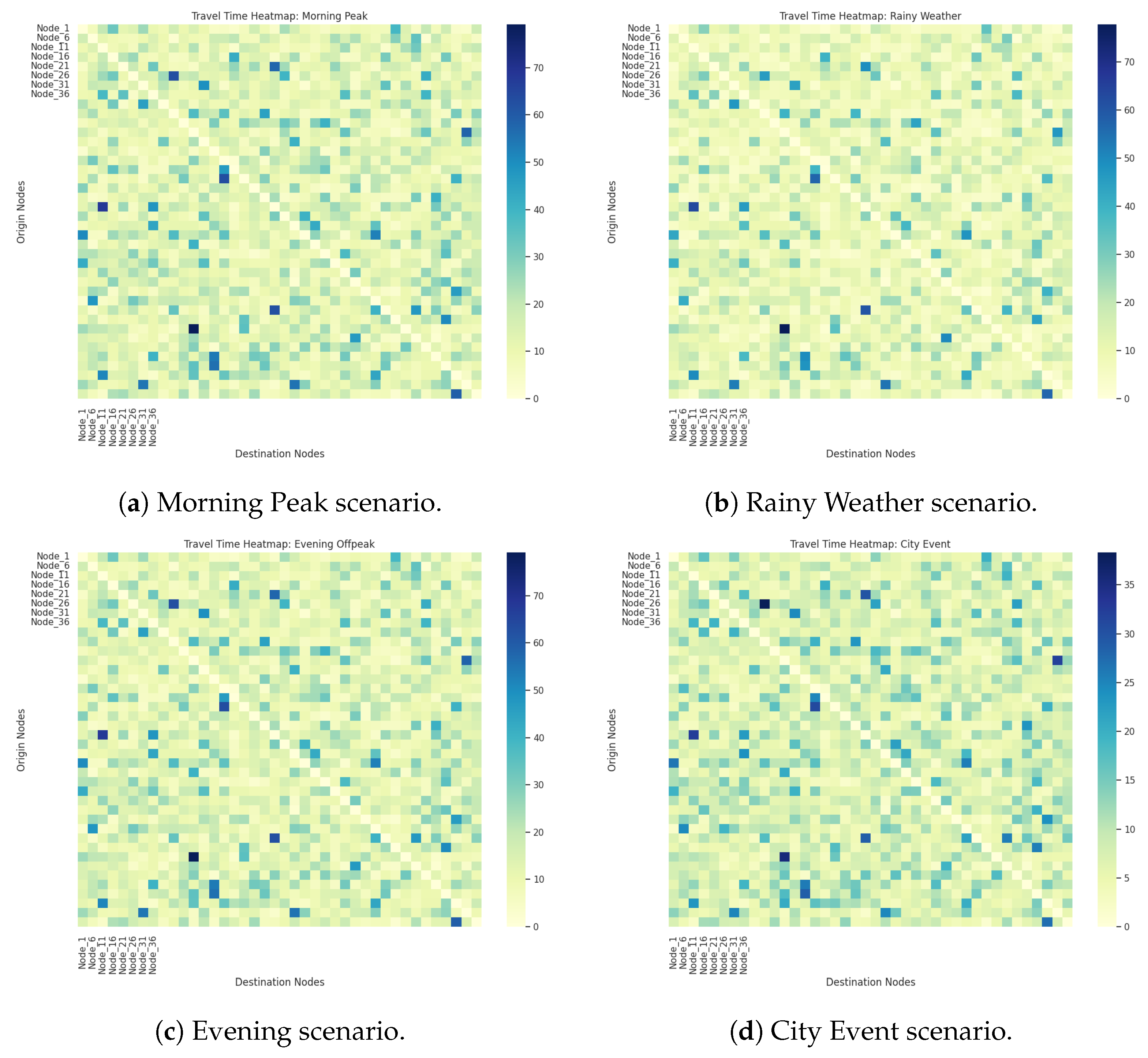
4.3. Travel Time Analysis
- Heatmap Visualizations: Figure 6a,b displays the travel times between origin and destination nodes for the Morning Peak and Rainy Weather scenarios, respectively. Darker shades (ranging from dark blue to green) indicate longer travel times, suggesting that specific origin–destination pairs are more adversely affected under congested conditions and weather disruptions.
- Scenario-Specific Patterns: The City Event scenario, as detailed in its corresponding heatmap (Figure 6d), reveals localized pockets of prolonged travel times, likely due to increased congestion and diversions. In contrast, the Evening Off-Peak heatmap (Figure 6c) shows a lighter color scheme, indicating overall shorter and more uniformly distributed travel times.
- Distribution Comparison: Figure 7 compares the travel time distributions across scenarios. The Morning Peak scenario is characterized by a right-skewed distribution with a higher median travel time, while the Rainy Weather scenario exhibits a narrower, left-skewed distribution, pointing to more consistent travel times. The City Event and Major Accident scenarios lie between these extremes, with the Major Accident scenario having the lowest overall travel times.
4.4. Scenario Comparison Summary
5. Discussion
- Joint routing optimization without mode-switching penalties.
- Variability-aware constraints to enable real-world variation.
- Balanced objective functions ( to ) against policy goals.
5.1. Strengths of the Optimization Model
5.2. Theoretical and Experimental Alignment
5.3. Benefits of Carpooling and Micro-Mobility Integration
5.4. Practical Applications and Scalability
- IoT Integration: Coupling with traffic sensors and ride-sharing APIs to enable real-time updates of , , and parameters (Section 3).
- Policy Tools: Providing urban planners with the following:
- –
- Optimal micro-mobility station placement based on clustering.
- –
- Dynamic pricing strategies using / trade-offs.
- –
- Emissions-aware routing complying with constraints.
5.5. Theoretical and Practical Developments
- Implementation: Real-time implementation (0.4 s) without a sacrifice in multimodal complexity—as opposed to approximations in [10].
- Policy Integration: Generating actionable outputs like optimal micro-mobility station density () and emissions budgets per route.
5.6. Limitations and Areas for Improvement
5.7. Future Research Directions
6. Conclusions
- Theoretical Innovation: First integrated model to combine carpooling, micromobility, and multi-leg routing with dynamic constraints (Section 2.9).
- Practical Impact: Sub-second computation supporting real-time use (Figure 4), with measurable 25 to 30% improvement over siloed alternatives.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Data Generation and Validation Details
Appendix A.1. Data-Generation Pseudocode
Appendix A.2. Sensitivity Analysis

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Max Allocation | Max Cost | Max Emissions |
|---|---|---|---|
| Travel Time | 4.2% | 3.1% | 2.8% |
| Demand | 6.7% | 5.3% | 4.9% |
| Emission Rates | 1.2% | 0.9% | 8.1% |
Appendix A.3. Statistical Validation
| Metric | D-Statistic | p-Value |
|---|---|---|
| Travel Times | 0.08 | 0.22 |
| Demand | 0.12 | 0.11 |
| Emissions | 0.07 | 0.31 |
Appendix A.4. Simulation Framework
Appendix A.4.1. Tools and Libraries
- PuLP: A linear programming library to define and solve the optimization model.
- NumPy: For numerical operations and synthetic data generation.
- Pandas: For data handling and manipulation.
- NetworkX: For handling and visualizing graph-based data structures.
- Matplotlib: For plotting and visualizing results.
- Multiprocessing: Parallelize simulations for efficiency.
Appendix A.4.2. Experimental Setup
- Python 3.8
- PuLP 2.4
- NumPy 1.19.2
- Pandas 1.1.3
- NetworkX 2.5
- Matplotlib 3.3.2
Appendix B. Models Comparisons
| Feature | Tamannaei & Irandoost (2019) | Kumar & Khani (2020) | Our Model |
|---|---|---|---|
| Multimodal Integration | No (Carpool-only) | Partial (Transit + Rideshare) | Yes (Carpool + Micro-mobility + Multi-leg) |
| Dynamic Scenario Handling | No | No | Yes (Peak/Weather/Accidents) |
| Emissions Optimization | No | No | Yes (Weighted in Objective) |
| Real-time Computation | 1.8 s (50 nodes) | 1.2 s (40 nodes) | 0.4 s (40 nodes) |
| User Satisfaction Metric | Basic (Time-only) | Moderate (Time + Cost) | Comprehensive (Time/Cost/Emissions/Satisfaction) |
References
- Aguiléra, A.; Pigalle, E. The future and sustainability of carpooling practices. An identification of research challenges. Sustainability 2021, 13, 11824. [Google Scholar] [CrossRef]
- Project Drawdown. Carpooling. Project Drawdown. 2018. Available online: https://www.drawdown.org/solutions/carpooling (accessed on 13 January 2025).
- Rus, D.; Alonso-Mora, J.; Samaranayake, S.; Wallar, A.; Frazzoli, E. How ride-sharing can improve traffic, save money, and help the environment. MIT News. 2016. Available online: https://news.mit.edu/2016/how-ride-sharing-can-improve-traffic-save-money-and-help-environment-0104 (accessed on 15 May 2024).
- Tamannaei, M.; Irandoost, I. Carpooling problem: A new mathematical model, branch-and-bound, and heuristic beam search algorithm. J. Intell. Transp. Syst. 2019, 23, 203–215. [Google Scholar] [CrossRef]
- Kumar, P.; Khani, A. An algorithm for integrating peer-to-peer ridesharing and schedule-based transit system for first mile/last mile access. arXiv 2020, arXiv:2007.07488. [Google Scholar] [CrossRef]
- Huang, Y.; Kockelman, K.M.; Garikapati, V. Shared automated vehicle fleet operations for first-mile last-mile transit connections with dynamic pooling. Comput. Environ. Urban Syst. 2022, 92, 101730. [Google Scholar] [CrossRef]
- Wang, F.; Zhu, Y.; Wang, F.; Liu, J.; Ma, X.; Fan, X. Car4Pac: Last Mile Parcel Delivery Through Intelligent Car Trip Sharing. IEEE Trans. Intell. Transp. Syst. 2020, 21, 4410–4424. [Google Scholar] [CrossRef]
- Lele, V.P.; Shah, D.J. Optimizing Transportation and Logistics Networks for Seamless Resource Flow: People, Materials, and Beyond. Int. J. Recent Eng. Sci. 2023, 10, 1–12. [Google Scholar] [CrossRef]
- Masoud, N.; Jayakrishnan, R. A real-time algorithm to solve the peer-to-peer ride-matching problem in a flexible ridesharing system. Transp. Res. Part B Methodol. 2017, 106, 218–236. [Google Scholar] [CrossRef]
- Wang, Z.; Hyland, M.F.; Bahk, Y.; Sarma, N.J. On optimizing shared-ride mobility services with walking legs. arXiv 2022, arXiv:2201.12639. [Google Scholar]
- Azimi, G.; Rahimi, A.; Lee, M.; Jin, X. Mode choice behavior for access and egress connection to transit services. Int. J. Transp. Sci. Technol. 2021, 10, 136–155. [Google Scholar] [CrossRef]
- Gdowska, K.; Viana, A.; Pedroso, J.P. Stochastic last-mile delivery with crowdshipping. Transp. Res. Procedia 2018, 30, 90–100. [Google Scholar] [CrossRef]
- Bian, Z.; Liu, X.; Bai, Y. Mechanism design for on-demand first-mile ridesharing. Transp. Res. Part B Methodol. 2020, 138, 77–117. [Google Scholar] [CrossRef]
- Coindreau, M.A.; Gallay, O.; Zufferey, N. Vehicle routing with transportable resources: Using carpooling and walking for on-site services. Eur. J. Oper. Res. 2019, 279, 996–1010. [Google Scholar] [CrossRef]
- Adnan, M.; Altaf, S.; Bellemans, T.; Yasar, A.u.H.; Shakshuki, E.M. Last-mile travel and bicycle sharing system in small/medium sized cities: User’s preferences investigation using hybrid choice model. J. Ambient Intell. Humaniz. Comput. 2019, 10, 4721–4731. [Google Scholar] [CrossRef]
- Mitropoulos, L.; Kortsari, A.; Ayfantopoulou, G. Factors affecting drivers to participate in a carpooling to public transport service. Sustainability 2021, 13, 9129. [Google Scholar] [CrossRef]
- Mourad, A.; Puchinger, J.; Chu, C. A survey of models and algorithms for optimizing shared mobility. Transp. Res. Part B Methodol. 2019, 123, 323–346. [Google Scholar] [CrossRef]
- Schaller, B. Can sharing a ride make for less traffic? Evidence from Uber and Lyft and implications for cities. Transp. Policy 2021, 102, 1–10. [Google Scholar] [CrossRef]
- Zhang, D.; Zhao, J.; Zhang, F.; Jiang, R.; He, T. Feeder: Supporting last-mile transit with extreme-scale urban infrastructure data. In Proceedings of the 14th International Conference on Information Processing in Sensor Networks, Seattle, WA, USA, 14–16 April 2015; pp. 226–237. [Google Scholar]
- Chen, Z.G.; Zhan, Z.H.; Kwong, S.; Zhang, J. Evolutionary computation for intelligent transportation in smart cities: A survey. IEEE Comput. Intell. Mag. 2022, 17, 83–102. [Google Scholar] [CrossRef]
- Djavadian, S.; Chow, J.Y. An agent-based day-to-day adjustment process for modeling ‘Mobility as a Service’with a two-sided flexible transport market. Transp. Res. Part B Methodol. 2017, 104, 36–57. [Google Scholar] [CrossRef]
- Gavalas, D.; Konstantopoulos, C.; Pantziou, G. Design and management of vehicle-sharing systems: A survey of algorithmic approaches. Smart Cities Homes 2016, 13, 261–289. [Google Scholar]
- Shen, Y.; Zhang, H.; Zhao, J. Integrating shared autonomous vehicle in public transportation system: A supply-side simulation of the first-mile service in Singapore. Transp. Res. Part A Policy Pract. 2018, 113, 125–136. [Google Scholar] [CrossRef]
- Martinez-Sykora, A.; McLeod, F.; Lamas-Fernandez, C.; Bektaş, T.; Cherrett, T.; Allen, J. Optimised solutions to the last-mile delivery problem in London using a combination of walking and driving. Ann. Oper. Res. 2020, 295, 645–693. [Google Scholar] [CrossRef]
- Tafreshian, A.; Masoud, N.; Yin, Y. Frontiers in service science: Ride matching for peer-to-peer ride sharing: A review and future directions. Serv. Sci. 2020, 12, 44–60. [Google Scholar] [CrossRef]
- Shaheen, S. Shared Mobility: The Potential of Ridehailing and Pooling; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Shaheen, S.; Cohen, A.; Chan, N.; Bansal, A. Sharing strategies: Carsharing, shared micromobility (bikesharing and scooter sharing), transportation network companies, microtransit, and other innovative mobility modes. In Transportation, Land Use, and Environmental Planning; Elsevier: Amsterdam, The Netherlands, 2020; pp. 237–262. [Google Scholar]
- Greenblatt, J.B.; Shaheen, S. Automated vehicles, on-demand mobility, and environmental impacts. Curr. Sustain. Energy Rep. 2015, 2, 74–81. [Google Scholar] [CrossRef]
- Anosike, A.; Loomes, H.; Udokporo, C.K.; Garza-Reyes, J.A. Exploring the challenges of electric vehicle adoption in final mile parcel delivery. Int. J. Logist. Res. Appl. 2023, 26, 683–707. [Google Scholar] [CrossRef]
- Feng, X.; Chu, F.; Chu, C.; Huang, Y. Crowdsource-enabled integrated production and transportation scheduling for smart city logistics. Int. J. Prod. Res. 2021, 59, 2157–2176. [Google Scholar] [CrossRef]
- Wright, S.; Nelson, J.D.; Cottrill, C.D. MaaS for the suburban market: Incorporating carpooling in the mix. Transp. Res. Part A Policy Pract. 2020, 131, 206–218. [Google Scholar] [CrossRef]
- Daskin, M.S. Urban Transportation Networks: Equilibrium Analysis with Mathematical Programming Methods; Prentice-Hall: Hoboken, NJ, USA, 1985. [Google Scholar]
- Mohring, H. Transportation Economics; The National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 1976. [Google Scholar]
- Salter, R.J.; Hounsell, N.B. Highway Traffic Analysis and Design; Bloomsbury Publishing: London, UK, 1996. [Google Scholar]
- Levinson, D.M.; Krizek, K.J. The End of Traffic and the Future of Access: A Roadmap to the New Transport Landscape; The National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 2017. [Google Scholar]
- Abduljabbar, R.L.; Liyanage, S.; Dia, H. The role of micro-mobility in shaping sustainable cities: A systematic literature review. Transp. Res. Part D Transp. Environ. 2021, 92, 102734. [Google Scholar] [CrossRef]
- Hao, J.Y.; Hatzopoulou, M.; Miller, E.J. Integrating an activity-based travel demand model with dynamic traffic assignment and emission models: Implementation in the Greater Toronto, Canada, area. Transp. Res. Rec. 2010, 2176, 1–13. [Google Scholar] [CrossRef]
- Gan, J.; Yan, D.; Li, L. Dual-Layer Dynamic Optimization Model for Carbon-Conscious Transport Mode Allocation. J. Adv. Transp. 2025, 2025, 2160394. [Google Scholar] [CrossRef]
- O’Driscoll, R.; Stettler, M.E.J.; Molden, N.; Oxley, T.; ApSimon, H.M. Real world CO2 and NOx emissions from 149 Euro 5 and 6 diesel, gasoline and hybrid passenger cars. Sci. Total Environ. 2018, 621, 282–290. [Google Scholar] [CrossRef]
- Nastasi, L.; Fiore, S. Environmental Assessment of Lithium-Ion Battery Lifecycle and of Their Use in Commercial Vehicles. Batteries 2024, 10, 90. [Google Scholar] [CrossRef]
- St-Louis, E.; Manaugh, K.; van Lierop, D.; El-Geneidy, A. The happy commuter: A comparison of commuter satisfaction across modes. Transp. Res. Part F Traffic Psychol. Behav. 2014, 26, 160–170. [Google Scholar] [CrossRef]
- Fabbri, R.; León, F.G.D. A Statistical Distance Derived From The Kolmogorov-Smirnov Test: Specification, reference measures (benchmarks) and example uses. arXiv 2017, arXiv:1711.00761. [Google Scholar] [CrossRef]
- U.S. Environmental Protection Agency. Overview of EPA’s MOTOR Vehicle Emission Simulator (MOVES5); Number EPA-420-R-24-011; U.S. Environmental Protection Agency: Washington, DC, USA, 2024.
- Global Designing Cities Initiative and National Association of City Transportation Officials. In Urban Street Design Guide-NACTO; Island Press: Washington, DC, USA, 2025.
- Vaidya, H.; Chatterji, T. SDG 11 sustainable cities and communities: SDG 11 and the new urban agenda: Global sustainability frameworks for local action. In Actioning the Global Goals for Local Impact: Towards Sustainability Science, Policy, Education and Practice; Springer: Berlin/Heidelberg, Germany, 2020; pp. 173–185. [Google Scholar]
- Imbugwa, G.B.; Mazzara, M. Towards a secure smart parking solution for business entities. In Proceedings of the International Conference on Advanced Information Networking and Applications, Toronto, ON, Canada, 23 April 2021; Springer International Publishing: Cham, Switzerland, 2021; pp. 469–478. [Google Scholar]
- Imbugwa, G.B.; Mazzara, M.; Distefano, S. Smart parking solution for enterprise on ethereum. In Proceedings of the 2021 International Conference “Nonlinearity, Information and Robotics” (NIR), Innopolis, Russia, 26–29 August 2021; pp. 1–6. [Google Scholar]
- Imbugwa, G.; Mazzara, M.; Distefano, S. Developing a mobile application using open source parking management system on etherium smart contracts. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2020; Volume 1694, p. 012022. [Google Scholar]



| Vehicle Type | CO2 (g/km) | NOx (mg/km) |
|---|---|---|
| Gasoline Car | 204 | 40 |
| Diesel Bus | 2000 | 6800 |
| Electric Car | 67 | N/A |
| E-bike | 6 | N/A |
| Scenario | Status | Vehicle Trips | Micro-Mobility Trips | Multi-Leg Trips | Computation Time (s) |
|---|---|---|---|---|---|
| Morning Peak | Optimal | 124 | 387 | 1129 | 0.41 |
| Evening Off-Peak | Optimal | 124 | 387 | 1129 | 0.38 |
| Rainy Weather | Optimal | 281 | 338 | 1021 | 0.40 |
| City Event | Optimal | 84 | 400 | 1156 | 0.54 |
| Major Accident | Optimal | 186 | 365 | 1089 | 0.37 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Imbugwa, G.B.; Gilb, T.; Mazzara, M. A User-Centered Theoretical Model for Future Urban Transit Systems. Future Transp. 2025, 5, 62. https://doi.org/10.3390/futuretransp5020062
Imbugwa GB, Gilb T, Mazzara M. A User-Centered Theoretical Model for Future Urban Transit Systems. Future Transportation. 2025; 5(2):62. https://doi.org/10.3390/futuretransp5020062
Chicago/Turabian StyleImbugwa, Gerald B., Tom Gilb, and Manuel Mazzara. 2025. "A User-Centered Theoretical Model for Future Urban Transit Systems" Future Transportation 5, no. 2: 62. https://doi.org/10.3390/futuretransp5020062
APA StyleImbugwa, G. B., Gilb, T., & Mazzara, M. (2025). A User-Centered Theoretical Model for Future Urban Transit Systems. Future Transportation, 5(2), 62. https://doi.org/10.3390/futuretransp5020062